├── .github
└── FUNDING.yml
├── .gitignore
├── .gitmodules
├── LICENSE
├── README.md
├── requirements.txt
└── yolov5_ros
├── launch
└── yolov5s_simple.launch.py
├── package.xml
├── resource
└── yolov5_ros
├── setup.cfg
├── setup.py
└── yolov5_ros
├── __init__.py
├── config
└── yolov5s.pt
├── data
├── Argoverse.yaml
├── GlobalWheat2020.yaml
├── Objects365.yaml
├── SKU-110K.yaml
├── VOC.yaml
├── VisDrone.yaml
├── coco.yaml
├── coco128.yaml
├── hyps
│ ├── hyp.finetune.yaml
│ ├── hyp.finetune_objects365.yaml
│ ├── hyp.scratch-high.yaml
│ ├── hyp.scratch-low.yaml
│ ├── hyp.scratch-med.yaml
│ └── hyp.scratch.yaml
├── images
│ ├── bus.jpg
│ └── zidane.jpg
├── scripts
│ ├── download_weights.sh
│ ├── get_coco.sh
│ └── get_coco128.sh
└── xView.yaml
├── export.py
├── main.py
├── models
├── __init__.py
├── common.py
├── experimental.py
├── hub
│ ├── anchors.yaml
│ ├── yolov3-spp.yaml
│ ├── yolov3-tiny.yaml
│ ├── yolov3.yaml
│ ├── yolov5-bifpn.yaml
│ ├── yolov5-fpn.yaml
│ ├── yolov5-p2.yaml
│ ├── yolov5-p34.yaml
│ ├── yolov5-p6.yaml
│ ├── yolov5-p7.yaml
│ ├── yolov5-panet.yaml
│ ├── yolov5l6.yaml
│ ├── yolov5m6.yaml
│ ├── yolov5n6.yaml
│ ├── yolov5s-ghost.yaml
│ ├── yolov5s-transformer.yaml
│ ├── yolov5s6.yaml
│ └── yolov5x6.yaml
├── tf.py
├── yolo.py
├── yolov5l.yaml
├── yolov5m.yaml
├── yolov5n.yaml
├── yolov5s.yaml
└── yolov5x.yaml
└── utils
├── __init__.py
├── activations.py
├── augmentations.py
├── autoanchor.py
├── autobatch.py
├── aws
├── __init__.py
├── mime.sh
├── resume.py
└── userdata.sh
├── benchmarks.py
├── callbacks.py
├── datasets.py
├── downloads.py
├── flask_rest_api
├── README.md
├── example_request.py
└── restapi.py
├── general.py
├── google_app_engine
├── Dockerfile
├── additional_requirements.txt
└── app.yaml
├── loggers
├── __init__.py
└── wandb
│ ├── README.md
│ ├── __init__.py
│ ├── log_dataset.py
│ ├── sweep.py
│ ├── sweep.yaml
│ └── wandb_utils.py
├── loss.py
├── metrics.py
├── plots.py
└── torch_utils.py
/.github/FUNDING.yml:
--------------------------------------------------------------------------------
1 | # These are supported funding model platforms
2 |
3 | github: Ar-Ray-code # Replace with up to 4 GitHub Sponsors-enabled usernames e.g., [user1, user2]
4 | patreon: # Replace with a single Patreon username
5 | open_collective: # Replace with a single Open Collective username
6 | ko_fi: # Replace with a single Ko-fi username
7 | tidelift: # Replace with a single Tidelift platform-name/package-name e.g., npm/babel
8 | community_bridge: # Replace with a single Community Bridge project-name e.g., cloud-foundry
9 | liberapay: # Replace with a single Liberapay username
10 | issuehunt: # Replace with a single IssueHunt username
11 | otechie: # Replace with a single Otechie username
12 | # custom: ['https://paypal.me/arraycode'] # Replace with up to 4 custom sponsorship URLs e.g., ['link1', 'link2']
--------------------------------------------------------------------------------
/.gitignore:
--------------------------------------------------------------------------------
1 | __pycache__/
--------------------------------------------------------------------------------
/.gitmodules:
--------------------------------------------------------------------------------
1 | [submodule "bbox_ex_msgs"]
2 | path = bbox_ex_msgs
3 | url = https://github.com/Ar-Ray-code/bbox_ex_msgs.git
4 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # YOLOv5-ROS
2 |
3 | [YOLOv5](https://github.com/ultralytics/yolov5) + ROS2 object detection package
4 |
5 | This program changes the input of detect.py (ultralytics/yolov5) to `sensor_msgs/Image` of ROS2.
6 |
7 |
8 |
9 | Maybe [this one](https://github.com/Alpaca-zip/ultralytics_ros) is easier to use.
10 |
11 |
12 |
13 | ## Installation
14 |
15 | ```bash
16 | mkdir -p ws_yolov5/src
17 | cd ws_yolov5/src
18 |
19 | git clone https://github.com/Ar-Ray-code/YOLOv5-ROS.git
20 | git clone https://github.com/Ar-Ray-code/bbox_ex_msgs.git
21 |
22 | pip3 install -r ./YOLOv5-ROS/requirements.txt
23 |
24 | colcon build --symlink-install
25 | ```
26 |
27 |
28 |
29 | ## Demo
30 |
31 | ```bash
32 | cd ws_yolov5/
33 | source ./install/setup.bash
34 | ros2 launch yolov5_ros yolov5s_simple.launch.py
35 | ```
36 |
37 |
38 |
39 |
40 | ## Requirements
41 | - ROS2 Foxy
42 | - OpenCV 4
43 | - PyTorch
44 | - bbox_ex_msgs
45 |
46 | ## Topic
47 |
48 | ### Subscribe
49 | - image_raw (`sensor_msgs/Image`)
50 |
51 | ### Publish
52 | - yolov5/image_raw : Resized image (`sensor_msgs/Image`)
53 | - yololv5/bounding_boxes : Output BoundingBoxes like darknet_ros_msgs (`bboxes_ex_msgs/BoundingBoxes`)
54 |
55 | ※ If you want to use `darknet_ros_msgs` , replace `bboxes_ex_msgs` with `darknet_ros_msgs`.
56 |
57 | ## About YOLOv5 and contributers
58 |
59 | - [YOLOv5 : GitHub](https://github.com/ultralytics/yolov5)
60 | - [Glenn Jocher : GitHub](https://github.com/glenn-jocher)
61 |
62 | ### What is YOLOv5 🚀
63 |
64 | YOLOv5 is the most useful object detection program in terms of speed of CPU inference and compatibility with PyTorch.
65 |
66 | > Shortly after the release of YOLOv4 Glenn Jocher introduced YOLOv5 using the Pytorch framework.
67 | The open source code is available on GitHub
68 |
69 |
70 | ## About writer
71 | - Ar-Ray : Japanese student.
72 | - Blog (Japanese) : https://ar-ray.hatenablog.com/
73 | - Twitter : https://twitter.com/Ray255Ar
74 |
--------------------------------------------------------------------------------
/requirements.txt:
--------------------------------------------------------------------------------
1 | # pip install -r requirements.txt
2 |
3 | # Base ----------------------------------------
4 | matplotlib>=3.2.2
5 | numpy>=1.18.5
6 | opencv-python>=4.1.2
7 | Pillow>=7.1.2
8 | PyYAML>=5.3.1
9 | requests>=2.23.0
10 | scipy>=1.4.1
11 | torch>=1.7.0
12 | torchvision>=0.8.1
13 | tqdm>=4.41.0
14 |
15 | # Logging -------------------------------------
16 | tensorboard>=2.4.1
17 | # wandb
18 |
19 | # Plotting ------------------------------------
20 | pandas>=1.1.4
21 | seaborn>=0.11.0
22 |
23 | # Export --------------------------------------
24 | # coremltools>=4.1 # CoreML export
25 | # onnx>=1.9.0 # ONNX export
26 | # onnx-simplifier>=0.3.6 # ONNX simplifier
27 | # scikit-learn==0.19.2 # CoreML quantization
28 | # tensorflow>=2.4.1 # TFLite export
29 | # tensorflowjs>=3.9.0 # TF.js export
30 | # openvino-dev # OpenVINO export
31 |
32 | # Extras --------------------------------------
33 | # albumentations>=1.0.3
34 | # Cython # for pycocotools https://github.com/cocodataset/cocoapi/issues/172
35 | # pycocotools>=2.0 # COCO mAP
36 | # roboflow
37 | thop # FLOPs computation
--------------------------------------------------------------------------------
/yolov5_ros/launch/yolov5s_simple.launch.py:
--------------------------------------------------------------------------------
1 | import launch
2 | import launch_ros.actions
3 | from launch.actions import IncludeLaunchDescription
4 | from ament_index_python.packages import get_package_share_directory
5 | from launch.launch_description_sources import PythonLaunchDescriptionSource
6 |
7 | def generate_launch_description():
8 | yolox_ros_share_dir = get_package_share_directory('yolov5_ros')
9 |
10 | webcam = launch_ros.actions.Node(
11 | package="v4l2_camera", executable="v4l2_camera_node",
12 | parameters=[
13 | {"image_size": [640,480]},
14 | ],
15 | )
16 |
17 | yolov5_ros = launch_ros.actions.Node(
18 | package="yolov5_ros", executable="yolov5_ros",
19 | parameters=[
20 | {"view_img":True},
21 | ],
22 |
23 | )
24 |
25 | rqt_graph = launch_ros.actions.Node(
26 | package="rqt_graph", executable="rqt_graph",
27 | )
28 |
29 | return launch.LaunchDescription([
30 | webcam,
31 | yolov5_ros,
32 | ])
--------------------------------------------------------------------------------
/yolov5_ros/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 | yolov5_ros
5 | 0.1.0
6 | The yolov5_ros package
7 | Ar-Ray-code
8 | GNU GENERAL PUBLIC LICENSE Version 3
9 | Ar-Ray-code
10 |
11 | ament_copyright
12 | ament_flake8
13 | ament_pep257
14 | python3-pytest
15 | rclpy
16 | sensor_msgs
17 | std_msgs
18 | cv_bridge
19 | bboxes_ex_msgs
20 |
21 |
22 | ament_python
23 |
24 |
25 |
--------------------------------------------------------------------------------
/yolov5_ros/resource/yolov5_ros:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/resource/yolov5_ros
--------------------------------------------------------------------------------
/yolov5_ros/setup.cfg:
--------------------------------------------------------------------------------
1 | [develop]
2 | script_dir=$base/lib/yolov5_ros
3 | [install]
4 | install_scripts=$base/lib/yolov5_ros
5 |
--------------------------------------------------------------------------------
/yolov5_ros/setup.py:
--------------------------------------------------------------------------------
1 | from setuptools import setup
2 |
3 | import os
4 | from glob import glob
5 | from urllib.request import urlretrieve
6 | from setuptools import find_packages
7 |
8 | package_name = 'yolov5_ros'
9 |
10 | setup(
11 | name=package_name,
12 | version='0.2.0',
13 | packages=find_packages(),
14 | data_files=[
15 | ('share/ament_index/resource_index/packages',
16 | ['resource/' + package_name]),
17 | ('share/' + package_name, ['package.xml']),
18 | (os.path.join('share', package_name), glob('./launch/*.launch.py')),
19 | # (os.path.join('share', package_name), glob('../weights/*.pth'))
20 | ],
21 | install_requires=['setuptools'],
22 | zip_safe=True,
23 | author='Ar-Ray-code',
24 | author_email="ray255ar@gmail.com",
25 | maintainer='Ar-Ray-code',
26 | maintainer_email="ray255ar@gmail.com",
27 | description='YOLOv5 + ROS2 Foxy',
28 | license='GNU GENERAL PUBLIC LICENSE Version 3',
29 | tests_require=['pytest'],
30 | entry_points={
31 | 'console_scripts': [
32 | 'yolov5_ros = '+package_name+'.main:ros_main',
33 | ],
34 | },
35 | )
36 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/__init__.py:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/__init__.py
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/config/yolov5s.pt:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/config/yolov5s.pt
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/Argoverse.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Argoverse-HD dataset (ring-front-center camera) http://www.cs.cmu.edu/~mengtial/proj/streaming/ by Argo AI
3 | # Example usage: python train.py --data Argoverse.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── Argoverse ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/Argoverse # dataset root dir
12 | train: Argoverse-1.1/images/train/ # train images (relative to 'path') 39384 images
13 | val: Argoverse-1.1/images/val/ # val images (relative to 'path') 15062 images
14 | test: Argoverse-1.1/images/test/ # test images (optional) https://eval.ai/web/challenges/challenge-page/800/overview
15 |
16 | # Classes
17 | nc: 8 # number of classes
18 | names: ['person', 'bicycle', 'car', 'motorcycle', 'bus', 'truck', 'traffic_light', 'stop_sign'] # class names
19 |
20 |
21 | # Download script/URL (optional) ---------------------------------------------------------------------------------------
22 | download: |
23 | import json
24 |
25 | from tqdm import tqdm
26 | from utils.general import download, Path
27 |
28 |
29 | def argoverse2yolo(set):
30 | labels = {}
31 | a = json.load(open(set, "rb"))
32 | for annot in tqdm(a['annotations'], desc=f"Converting {set} to YOLOv5 format..."):
33 | img_id = annot['image_id']
34 | img_name = a['images'][img_id]['name']
35 | img_label_name = img_name[:-3] + "txt"
36 |
37 | cls = annot['category_id'] # instance class id
38 | x_center, y_center, width, height = annot['bbox']
39 | x_center = (x_center + width / 2) / 1920.0 # offset and scale
40 | y_center = (y_center + height / 2) / 1200.0 # offset and scale
41 | width /= 1920.0 # scale
42 | height /= 1200.0 # scale
43 |
44 | img_dir = set.parents[2] / 'Argoverse-1.1' / 'labels' / a['seq_dirs'][a['images'][annot['image_id']]['sid']]
45 | if not img_dir.exists():
46 | img_dir.mkdir(parents=True, exist_ok=True)
47 |
48 | k = str(img_dir / img_label_name)
49 | if k not in labels:
50 | labels[k] = []
51 | labels[k].append(f"{cls} {x_center} {y_center} {width} {height}\n")
52 |
53 | for k in labels:
54 | with open(k, "w") as f:
55 | f.writelines(labels[k])
56 |
57 |
58 | # Download
59 | dir = Path('../datasets/Argoverse') # dataset root dir
60 | urls = ['https://argoverse-hd.s3.us-east-2.amazonaws.com/Argoverse-HD-Full.zip']
61 | download(urls, dir=dir, delete=False)
62 |
63 | # Convert
64 | annotations_dir = 'Argoverse-HD/annotations/'
65 | (dir / 'Argoverse-1.1' / 'tracking').rename(dir / 'Argoverse-1.1' / 'images') # rename 'tracking' to 'images'
66 | for d in "train.json", "val.json":
67 | argoverse2yolo(dir / annotations_dir / d) # convert VisDrone annotations to YOLO labels
68 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/GlobalWheat2020.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Global Wheat 2020 dataset http://www.global-wheat.com/ by University of Saskatchewan
3 | # Example usage: python train.py --data GlobalWheat2020.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── GlobalWheat2020 ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/GlobalWheat2020 # dataset root dir
12 | train: # train images (relative to 'path') 3422 images
13 | - images/arvalis_1
14 | - images/arvalis_2
15 | - images/arvalis_3
16 | - images/ethz_1
17 | - images/rres_1
18 | - images/inrae_1
19 | - images/usask_1
20 | val: # val images (relative to 'path') 748 images (WARNING: train set contains ethz_1)
21 | - images/ethz_1
22 | test: # test images (optional) 1276 images
23 | - images/utokyo_1
24 | - images/utokyo_2
25 | - images/nau_1
26 | - images/uq_1
27 |
28 | # Classes
29 | nc: 1 # number of classes
30 | names: ['wheat_head'] # class names
31 |
32 |
33 | # Download script/URL (optional) ---------------------------------------------------------------------------------------
34 | download: |
35 | from utils.general import download, Path
36 |
37 | # Download
38 | dir = Path(yaml['path']) # dataset root dir
39 | urls = ['https://zenodo.org/record/4298502/files/global-wheat-codalab-official.zip',
40 | 'https://github.com/ultralytics/yolov5/releases/download/v1.0/GlobalWheat2020_labels.zip']
41 | download(urls, dir=dir)
42 |
43 | # Make Directories
44 | for p in 'annotations', 'images', 'labels':
45 | (dir / p).mkdir(parents=True, exist_ok=True)
46 |
47 | # Move
48 | for p in 'arvalis_1', 'arvalis_2', 'arvalis_3', 'ethz_1', 'rres_1', 'inrae_1', 'usask_1', \
49 | 'utokyo_1', 'utokyo_2', 'nau_1', 'uq_1':
50 | (dir / p).rename(dir / 'images' / p) # move to /images
51 | f = (dir / p).with_suffix('.json') # json file
52 | if f.exists():
53 | f.rename((dir / 'annotations' / p).with_suffix('.json')) # move to /annotations
54 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/Objects365.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Objects365 dataset https://www.objects365.org/ by Megvii
3 | # Example usage: python train.py --data Objects365.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── Objects365 ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/Objects365 # dataset root dir
12 | train: images/train # train images (relative to 'path') 1742289 images
13 | val: images/val # val images (relative to 'path') 80000 images
14 | test: # test images (optional)
15 |
16 | # Classes
17 | nc: 365 # number of classes
18 | names: ['Person', 'Sneakers', 'Chair', 'Other Shoes', 'Hat', 'Car', 'Lamp', 'Glasses', 'Bottle', 'Desk', 'Cup',
19 | 'Street Lights', 'Cabinet/shelf', 'Handbag/Satchel', 'Bracelet', 'Plate', 'Picture/Frame', 'Helmet', 'Book',
20 | 'Gloves', 'Storage box', 'Boat', 'Leather Shoes', 'Flower', 'Bench', 'Potted Plant', 'Bowl/Basin', 'Flag',
21 | 'Pillow', 'Boots', 'Vase', 'Microphone', 'Necklace', 'Ring', 'SUV', 'Wine Glass', 'Belt', 'Monitor/TV',
22 | 'Backpack', 'Umbrella', 'Traffic Light', 'Speaker', 'Watch', 'Tie', 'Trash bin Can', 'Slippers', 'Bicycle',
23 | 'Stool', 'Barrel/bucket', 'Van', 'Couch', 'Sandals', 'Basket', 'Drum', 'Pen/Pencil', 'Bus', 'Wild Bird',
24 | 'High Heels', 'Motorcycle', 'Guitar', 'Carpet', 'Cell Phone', 'Bread', 'Camera', 'Canned', 'Truck',
25 | 'Traffic cone', 'Cymbal', 'Lifesaver', 'Towel', 'Stuffed Toy', 'Candle', 'Sailboat', 'Laptop', 'Awning',
26 | 'Bed', 'Faucet', 'Tent', 'Horse', 'Mirror', 'Power outlet', 'Sink', 'Apple', 'Air Conditioner', 'Knife',
27 | 'Hockey Stick', 'Paddle', 'Pickup Truck', 'Fork', 'Traffic Sign', 'Balloon', 'Tripod', 'Dog', 'Spoon', 'Clock',
28 | 'Pot', 'Cow', 'Cake', 'Dinning Table', 'Sheep', 'Hanger', 'Blackboard/Whiteboard', 'Napkin', 'Other Fish',
29 | 'Orange/Tangerine', 'Toiletry', 'Keyboard', 'Tomato', 'Lantern', 'Machinery Vehicle', 'Fan',
30 | 'Green Vegetables', 'Banana', 'Baseball Glove', 'Airplane', 'Mouse', 'Train', 'Pumpkin', 'Soccer', 'Skiboard',
31 | 'Luggage', 'Nightstand', 'Tea pot', 'Telephone', 'Trolley', 'Head Phone', 'Sports Car', 'Stop Sign',
32 | 'Dessert', 'Scooter', 'Stroller', 'Crane', 'Remote', 'Refrigerator', 'Oven', 'Lemon', 'Duck', 'Baseball Bat',
33 | 'Surveillance Camera', 'Cat', 'Jug', 'Broccoli', 'Piano', 'Pizza', 'Elephant', 'Skateboard', 'Surfboard',
34 | 'Gun', 'Skating and Skiing shoes', 'Gas stove', 'Donut', 'Bow Tie', 'Carrot', 'Toilet', 'Kite', 'Strawberry',
35 | 'Other Balls', 'Shovel', 'Pepper', 'Computer Box', 'Toilet Paper', 'Cleaning Products', 'Chopsticks',
36 | 'Microwave', 'Pigeon', 'Baseball', 'Cutting/chopping Board', 'Coffee Table', 'Side Table', 'Scissors',
37 | 'Marker', 'Pie', 'Ladder', 'Snowboard', 'Cookies', 'Radiator', 'Fire Hydrant', 'Basketball', 'Zebra', 'Grape',
38 | 'Giraffe', 'Potato', 'Sausage', 'Tricycle', 'Violin', 'Egg', 'Fire Extinguisher', 'Candy', 'Fire Truck',
39 | 'Billiards', 'Converter', 'Bathtub', 'Wheelchair', 'Golf Club', 'Briefcase', 'Cucumber', 'Cigar/Cigarette',
40 | 'Paint Brush', 'Pear', 'Heavy Truck', 'Hamburger', 'Extractor', 'Extension Cord', 'Tong', 'Tennis Racket',
41 | 'Folder', 'American Football', 'earphone', 'Mask', 'Kettle', 'Tennis', 'Ship', 'Swing', 'Coffee Machine',
42 | 'Slide', 'Carriage', 'Onion', 'Green beans', 'Projector', 'Frisbee', 'Washing Machine/Drying Machine',
43 | 'Chicken', 'Printer', 'Watermelon', 'Saxophone', 'Tissue', 'Toothbrush', 'Ice cream', 'Hot-air balloon',
44 | 'Cello', 'French Fries', 'Scale', 'Trophy', 'Cabbage', 'Hot dog', 'Blender', 'Peach', 'Rice', 'Wallet/Purse',
45 | 'Volleyball', 'Deer', 'Goose', 'Tape', 'Tablet', 'Cosmetics', 'Trumpet', 'Pineapple', 'Golf Ball',
46 | 'Ambulance', 'Parking meter', 'Mango', 'Key', 'Hurdle', 'Fishing Rod', 'Medal', 'Flute', 'Brush', 'Penguin',
47 | 'Megaphone', 'Corn', 'Lettuce', 'Garlic', 'Swan', 'Helicopter', 'Green Onion', 'Sandwich', 'Nuts',
48 | 'Speed Limit Sign', 'Induction Cooker', 'Broom', 'Trombone', 'Plum', 'Rickshaw', 'Goldfish', 'Kiwi fruit',
49 | 'Router/modem', 'Poker Card', 'Toaster', 'Shrimp', 'Sushi', 'Cheese', 'Notepaper', 'Cherry', 'Pliers', 'CD',
50 | 'Pasta', 'Hammer', 'Cue', 'Avocado', 'Hamimelon', 'Flask', 'Mushroom', 'Screwdriver', 'Soap', 'Recorder',
51 | 'Bear', 'Eggplant', 'Board Eraser', 'Coconut', 'Tape Measure/Ruler', 'Pig', 'Showerhead', 'Globe', 'Chips',
52 | 'Steak', 'Crosswalk Sign', 'Stapler', 'Camel', 'Formula 1', 'Pomegranate', 'Dishwasher', 'Crab',
53 | 'Hoverboard', 'Meat ball', 'Rice Cooker', 'Tuba', 'Calculator', 'Papaya', 'Antelope', 'Parrot', 'Seal',
54 | 'Butterfly', 'Dumbbell', 'Donkey', 'Lion', 'Urinal', 'Dolphin', 'Electric Drill', 'Hair Dryer', 'Egg tart',
55 | 'Jellyfish', 'Treadmill', 'Lighter', 'Grapefruit', 'Game board', 'Mop', 'Radish', 'Baozi', 'Target', 'French',
56 | 'Spring Rolls', 'Monkey', 'Rabbit', 'Pencil Case', 'Yak', 'Red Cabbage', 'Binoculars', 'Asparagus', 'Barbell',
57 | 'Scallop', 'Noddles', 'Comb', 'Dumpling', 'Oyster', 'Table Tennis paddle', 'Cosmetics Brush/Eyeliner Pencil',
58 | 'Chainsaw', 'Eraser', 'Lobster', 'Durian', 'Okra', 'Lipstick', 'Cosmetics Mirror', 'Curling', 'Table Tennis']
59 |
60 |
61 | # Download script/URL (optional) ---------------------------------------------------------------------------------------
62 | download: |
63 | from pycocotools.coco import COCO
64 | from tqdm import tqdm
65 |
66 | from utils.general import Path, download, np, xyxy2xywhn
67 |
68 | # Make Directories
69 | dir = Path(yaml['path']) # dataset root dir
70 | for p in 'images', 'labels':
71 | (dir / p).mkdir(parents=True, exist_ok=True)
72 | for q in 'train', 'val':
73 | (dir / p / q).mkdir(parents=True, exist_ok=True)
74 |
75 | # Train, Val Splits
76 | for split, patches in [('train', 50 + 1), ('val', 43 + 1)]:
77 | print(f"Processing {split} in {patches} patches ...")
78 | images, labels = dir / 'images' / split, dir / 'labels' / split
79 |
80 | # Download
81 | url = f"https://dorc.ks3-cn-beijing.ksyun.com/data-set/2020Objects365%E6%95%B0%E6%8D%AE%E9%9B%86/{split}/"
82 | if split == 'train':
83 | download([f'{url}zhiyuan_objv2_{split}.tar.gz'], dir=dir, delete=False) # annotations json
84 | download([f'{url}patch{i}.tar.gz' for i in range(patches)], dir=images, curl=True, delete=False, threads=8)
85 | elif split == 'val':
86 | download([f'{url}zhiyuan_objv2_{split}.json'], dir=dir, delete=False) # annotations json
87 | download([f'{url}images/v1/patch{i}.tar.gz' for i in range(15 + 1)], dir=images, curl=True, delete=False, threads=8)
88 | download([f'{url}images/v2/patch{i}.tar.gz' for i in range(16, patches)], dir=images, curl=True, delete=False, threads=8)
89 |
90 | # Move
91 | for f in tqdm(images.rglob('*.jpg'), desc=f'Moving {split} images'):
92 | f.rename(images / f.name) # move to /images/{split}
93 |
94 | # Labels
95 | coco = COCO(dir / f'zhiyuan_objv2_{split}.json')
96 | names = [x["name"] for x in coco.loadCats(coco.getCatIds())]
97 | for cid, cat in enumerate(names):
98 | catIds = coco.getCatIds(catNms=[cat])
99 | imgIds = coco.getImgIds(catIds=catIds)
100 | for im in tqdm(coco.loadImgs(imgIds), desc=f'Class {cid + 1}/{len(names)} {cat}'):
101 | width, height = im["width"], im["height"]
102 | path = Path(im["file_name"]) # image filename
103 | try:
104 | with open(labels / path.with_suffix('.txt').name, 'a') as file:
105 | annIds = coco.getAnnIds(imgIds=im["id"], catIds=catIds, iscrowd=None)
106 | for a in coco.loadAnns(annIds):
107 | x, y, w, h = a['bbox'] # bounding box in xywh (xy top-left corner)
108 | xyxy = np.array([x, y, x + w, y + h])[None] # pixels(1,4)
109 | x, y, w, h = xyxy2xywhn(xyxy, w=width, h=height, clip=True)[0] # normalized and clipped
110 | file.write(f"{cid} {x:.5f} {y:.5f} {w:.5f} {h:.5f}\n")
111 | except Exception as e:
112 | print(e)
113 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/SKU-110K.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # SKU-110K retail items dataset https://github.com/eg4000/SKU110K_CVPR19 by Trax Retail
3 | # Example usage: python train.py --data SKU-110K.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── SKU-110K ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/SKU-110K # dataset root dir
12 | train: train.txt # train images (relative to 'path') 8219 images
13 | val: val.txt # val images (relative to 'path') 588 images
14 | test: test.txt # test images (optional) 2936 images
15 |
16 | # Classes
17 | nc: 1 # number of classes
18 | names: ['object'] # class names
19 |
20 |
21 | # Download script/URL (optional) ---------------------------------------------------------------------------------------
22 | download: |
23 | import shutil
24 | from tqdm import tqdm
25 | from utils.general import np, pd, Path, download, xyxy2xywh
26 |
27 | # Download
28 | dir = Path(yaml['path']) # dataset root dir
29 | parent = Path(dir.parent) # download dir
30 | urls = ['http://trax-geometry.s3.amazonaws.com/cvpr_challenge/SKU110K_fixed.tar.gz']
31 | download(urls, dir=parent, delete=False)
32 |
33 | # Rename directories
34 | if dir.exists():
35 | shutil.rmtree(dir)
36 | (parent / 'SKU110K_fixed').rename(dir) # rename dir
37 | (dir / 'labels').mkdir(parents=True, exist_ok=True) # create labels dir
38 |
39 | # Convert labels
40 | names = 'image', 'x1', 'y1', 'x2', 'y2', 'class', 'image_width', 'image_height' # column names
41 | for d in 'annotations_train.csv', 'annotations_val.csv', 'annotations_test.csv':
42 | x = pd.read_csv(dir / 'annotations' / d, names=names).values # annotations
43 | images, unique_images = x[:, 0], np.unique(x[:, 0])
44 | with open((dir / d).with_suffix('.txt').__str__().replace('annotations_', ''), 'w') as f:
45 | f.writelines(f'./images/{s}\n' for s in unique_images)
46 | for im in tqdm(unique_images, desc=f'Converting {dir / d}'):
47 | cls = 0 # single-class dataset
48 | with open((dir / 'labels' / im).with_suffix('.txt'), 'a') as f:
49 | for r in x[images == im]:
50 | w, h = r[6], r[7] # image width, height
51 | xywh = xyxy2xywh(np.array([[r[1] / w, r[2] / h, r[3] / w, r[4] / h]]))[0] # instance
52 | f.write(f"{cls} {xywh[0]:.5f} {xywh[1]:.5f} {xywh[2]:.5f} {xywh[3]:.5f}\n") # write label
53 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/VOC.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # PASCAL VOC dataset http://host.robots.ox.ac.uk/pascal/VOC by University of Oxford
3 | # Example usage: python train.py --data VOC.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── VOC ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/VOC
12 | train: # train images (relative to 'path') 16551 images
13 | - images/train2012
14 | - images/train2007
15 | - images/val2012
16 | - images/val2007
17 | val: # val images (relative to 'path') 4952 images
18 | - images/test2007
19 | test: # test images (optional)
20 | - images/test2007
21 |
22 | # Classes
23 | nc: 20 # number of classes
24 | names: ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
25 | 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'] # class names
26 |
27 |
28 | # Download script/URL (optional) ---------------------------------------------------------------------------------------
29 | download: |
30 | import xml.etree.ElementTree as ET
31 |
32 | from tqdm import tqdm
33 | from utils.general import download, Path
34 |
35 |
36 | def convert_label(path, lb_path, year, image_id):
37 | def convert_box(size, box):
38 | dw, dh = 1. / size[0], 1. / size[1]
39 | x, y, w, h = (box[0] + box[1]) / 2.0 - 1, (box[2] + box[3]) / 2.0 - 1, box[1] - box[0], box[3] - box[2]
40 | return x * dw, y * dh, w * dw, h * dh
41 |
42 | in_file = open(path / f'VOC{year}/Annotations/{image_id}.xml')
43 | out_file = open(lb_path, 'w')
44 | tree = ET.parse(in_file)
45 | root = tree.getroot()
46 | size = root.find('size')
47 | w = int(size.find('width').text)
48 | h = int(size.find('height').text)
49 |
50 | for obj in root.iter('object'):
51 | cls = obj.find('name').text
52 | if cls in yaml['names'] and not int(obj.find('difficult').text) == 1:
53 | xmlbox = obj.find('bndbox')
54 | bb = convert_box((w, h), [float(xmlbox.find(x).text) for x in ('xmin', 'xmax', 'ymin', 'ymax')])
55 | cls_id = yaml['names'].index(cls) # class id
56 | out_file.write(" ".join([str(a) for a in (cls_id, *bb)]) + '\n')
57 |
58 |
59 | # Download
60 | dir = Path(yaml['path']) # dataset root dir
61 | url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
62 | urls = [url + 'VOCtrainval_06-Nov-2007.zip', # 446MB, 5012 images
63 | url + 'VOCtest_06-Nov-2007.zip', # 438MB, 4953 images
64 | url + 'VOCtrainval_11-May-2012.zip'] # 1.95GB, 17126 images
65 | download(urls, dir=dir / 'images', delete=False)
66 |
67 | # Convert
68 | path = dir / f'images/VOCdevkit'
69 | for year, image_set in ('2012', 'train'), ('2012', 'val'), ('2007', 'train'), ('2007', 'val'), ('2007', 'test'):
70 | imgs_path = dir / 'images' / f'{image_set}{year}'
71 | lbs_path = dir / 'labels' / f'{image_set}{year}'
72 | imgs_path.mkdir(exist_ok=True, parents=True)
73 | lbs_path.mkdir(exist_ok=True, parents=True)
74 |
75 | image_ids = open(path / f'VOC{year}/ImageSets/Main/{image_set}.txt').read().strip().split()
76 | for id in tqdm(image_ids, desc=f'{image_set}{year}'):
77 | f = path / f'VOC{year}/JPEGImages/{id}.jpg' # old img path
78 | lb_path = (lbs_path / f.name).with_suffix('.txt') # new label path
79 | f.rename(imgs_path / f.name) # move image
80 | convert_label(path, lb_path, year, id) # convert labels to YOLO format
81 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/VisDrone.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # VisDrone2019-DET dataset https://github.com/VisDrone/VisDrone-Dataset by Tianjin University
3 | # Example usage: python train.py --data VisDrone.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── VisDrone ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/VisDrone # dataset root dir
12 | train: VisDrone2019-DET-train/images # train images (relative to 'path') 6471 images
13 | val: VisDrone2019-DET-val/images # val images (relative to 'path') 548 images
14 | test: VisDrone2019-DET-test-dev/images # test images (optional) 1610 images
15 |
16 | # Classes
17 | nc: 10 # number of classes
18 | names: ['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor']
19 |
20 |
21 | # Download script/URL (optional) ---------------------------------------------------------------------------------------
22 | download: |
23 | from utils.general import download, os, Path
24 |
25 | def visdrone2yolo(dir):
26 | from PIL import Image
27 | from tqdm import tqdm
28 |
29 | def convert_box(size, box):
30 | # Convert VisDrone box to YOLO xywh box
31 | dw = 1. / size[0]
32 | dh = 1. / size[1]
33 | return (box[0] + box[2] / 2) * dw, (box[1] + box[3] / 2) * dh, box[2] * dw, box[3] * dh
34 |
35 | (dir / 'labels').mkdir(parents=True, exist_ok=True) # make labels directory
36 | pbar = tqdm((dir / 'annotations').glob('*.txt'), desc=f'Converting {dir}')
37 | for f in pbar:
38 | img_size = Image.open((dir / 'images' / f.name).with_suffix('.jpg')).size
39 | lines = []
40 | with open(f, 'r') as file: # read annotation.txt
41 | for row in [x.split(',') for x in file.read().strip().splitlines()]:
42 | if row[4] == '0': # VisDrone 'ignored regions' class 0
43 | continue
44 | cls = int(row[5]) - 1
45 | box = convert_box(img_size, tuple(map(int, row[:4])))
46 | lines.append(f"{cls} {' '.join(f'{x:.6f}' for x in box)}\n")
47 | with open(str(f).replace(os.sep + 'annotations' + os.sep, os.sep + 'labels' + os.sep), 'w') as fl:
48 | fl.writelines(lines) # write label.txt
49 |
50 |
51 | # Download
52 | dir = Path(yaml['path']) # dataset root dir
53 | urls = ['https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-train.zip',
54 | 'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-val.zip',
55 | 'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-test-dev.zip',
56 | 'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-test-challenge.zip']
57 | download(urls, dir=dir)
58 |
59 | # Convert
60 | for d in 'VisDrone2019-DET-train', 'VisDrone2019-DET-val', 'VisDrone2019-DET-test-dev':
61 | visdrone2yolo(dir / d) # convert VisDrone annotations to YOLO labels
62 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/coco.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # COCO 2017 dataset http://cocodataset.org by Microsoft
3 | # Example usage: python train.py --data coco.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── coco ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/coco # dataset root dir
12 | train: train2017.txt # train images (relative to 'path') 118287 images
13 | val: val2017.txt # val images (relative to 'path') 5000 images
14 | test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
15 |
16 | # Classes
17 | nc: 80 # number of classes
18 | names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
19 | 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
20 | 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
21 | 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
22 | 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
23 | 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
24 | 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
25 | 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
26 | 'hair drier', 'toothbrush'] # class names
27 |
28 |
29 | # Download script/URL (optional)
30 | download: |
31 | from utils.general import download, Path
32 |
33 | # Download labels
34 | segments = False # segment or box labels
35 | dir = Path(yaml['path']) # dataset root dir
36 | url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
37 | urls = [url + ('coco2017labels-segments.zip' if segments else 'coco2017labels.zip')] # labels
38 | download(urls, dir=dir.parent)
39 |
40 | # Download data
41 | urls = ['http://images.cocodataset.org/zips/train2017.zip', # 19G, 118k images
42 | 'http://images.cocodataset.org/zips/val2017.zip', # 1G, 5k images
43 | 'http://images.cocodataset.org/zips/test2017.zip'] # 7G, 41k images (optional)
44 | download(urls, dir=dir / 'images', threads=3)
45 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/coco128.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # COCO128 dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
3 | # Example usage: python train.py --data coco128.yaml
4 | # parent
5 | # ├── yolov5
6 | # └── datasets
7 | # └── coco128 ← downloads here
8 |
9 |
10 | # Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
11 | path: ../datasets/coco128 # dataset root dir
12 | train: images/train2017 # train images (relative to 'path') 128 images
13 | val: images/train2017 # val images (relative to 'path') 128 images
14 | test: # test images (optional)
15 |
16 | # Classes
17 | nc: 80 # number of classes
18 | names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
19 | 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
20 | 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
21 | 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
22 | 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
23 | 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
24 | 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
25 | 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
26 | 'hair drier', 'toothbrush'] # class names
27 |
28 |
29 | # Download script/URL (optional)
30 | download: https://ultralytics.com/assets/coco128.zip
31 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/hyps/hyp.finetune.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Hyperparameters for VOC finetuning
3 | # python train.py --batch 64 --weights yolov5m.pt --data VOC.yaml --img 512 --epochs 50
4 | # See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
5 |
6 | # Hyperparameter Evolution Results
7 | # Generations: 306
8 | # P R mAP.5 mAP.5:.95 box obj cls
9 | # Metrics: 0.6 0.936 0.896 0.684 0.0115 0.00805 0.00146
10 |
11 | lr0: 0.0032
12 | lrf: 0.12
13 | momentum: 0.843
14 | weight_decay: 0.00036
15 | warmup_epochs: 2.0
16 | warmup_momentum: 0.5
17 | warmup_bias_lr: 0.05
18 | box: 0.0296
19 | cls: 0.243
20 | cls_pw: 0.631
21 | obj: 0.301
22 | obj_pw: 0.911
23 | iou_t: 0.2
24 | anchor_t: 2.91
25 | # anchors: 3.63
26 | fl_gamma: 0.0
27 | hsv_h: 0.0138
28 | hsv_s: 0.664
29 | hsv_v: 0.464
30 | degrees: 0.373
31 | translate: 0.245
32 | scale: 0.898
33 | shear: 0.602
34 | perspective: 0.0
35 | flipud: 0.00856
36 | fliplr: 0.5
37 | mosaic: 1.0
38 | mixup: 0.243
39 | copy_paste: 0.0
40 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/hyps/hyp.finetune_objects365.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | lr0: 0.00258
4 | lrf: 0.17
5 | momentum: 0.779
6 | weight_decay: 0.00058
7 | warmup_epochs: 1.33
8 | warmup_momentum: 0.86
9 | warmup_bias_lr: 0.0711
10 | box: 0.0539
11 | cls: 0.299
12 | cls_pw: 0.825
13 | obj: 0.632
14 | obj_pw: 1.0
15 | iou_t: 0.2
16 | anchor_t: 3.44
17 | anchors: 3.2
18 | fl_gamma: 0.0
19 | hsv_h: 0.0188
20 | hsv_s: 0.704
21 | hsv_v: 0.36
22 | degrees: 0.0
23 | translate: 0.0902
24 | scale: 0.491
25 | shear: 0.0
26 | perspective: 0.0
27 | flipud: 0.0
28 | fliplr: 0.5
29 | mosaic: 1.0
30 | mixup: 0.0
31 | copy_paste: 0.0
32 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/hyps/hyp.scratch-high.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Hyperparameters for high-augmentation COCO training from scratch
3 | # python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
4 | # See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
5 |
6 | lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
7 | lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
8 | momentum: 0.937 # SGD momentum/Adam beta1
9 | weight_decay: 0.0005 # optimizer weight decay 5e-4
10 | warmup_epochs: 3.0 # warmup epochs (fractions ok)
11 | warmup_momentum: 0.8 # warmup initial momentum
12 | warmup_bias_lr: 0.1 # warmup initial bias lr
13 | box: 0.05 # box loss gain
14 | cls: 0.3 # cls loss gain
15 | cls_pw: 1.0 # cls BCELoss positive_weight
16 | obj: 0.7 # obj loss gain (scale with pixels)
17 | obj_pw: 1.0 # obj BCELoss positive_weight
18 | iou_t: 0.20 # IoU training threshold
19 | anchor_t: 4.0 # anchor-multiple threshold
20 | # anchors: 3 # anchors per output layer (0 to ignore)
21 | fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
22 | hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
23 | hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
24 | hsv_v: 0.4 # image HSV-Value augmentation (fraction)
25 | degrees: 0.0 # image rotation (+/- deg)
26 | translate: 0.1 # image translation (+/- fraction)
27 | scale: 0.9 # image scale (+/- gain)
28 | shear: 0.0 # image shear (+/- deg)
29 | perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
30 | flipud: 0.0 # image flip up-down (probability)
31 | fliplr: 0.5 # image flip left-right (probability)
32 | mosaic: 1.0 # image mosaic (probability)
33 | mixup: 0.1 # image mixup (probability)
34 | copy_paste: 0.1 # segment copy-paste (probability)
35 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/hyps/hyp.scratch-low.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Hyperparameters for low-augmentation COCO training from scratch
3 | # python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
4 | # See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
5 |
6 | lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
7 | lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
8 | momentum: 0.937 # SGD momentum/Adam beta1
9 | weight_decay: 0.0005 # optimizer weight decay 5e-4
10 | warmup_epochs: 3.0 # warmup epochs (fractions ok)
11 | warmup_momentum: 0.8 # warmup initial momentum
12 | warmup_bias_lr: 0.1 # warmup initial bias lr
13 | box: 0.05 # box loss gain
14 | cls: 0.5 # cls loss gain
15 | cls_pw: 1.0 # cls BCELoss positive_weight
16 | obj: 1.0 # obj loss gain (scale with pixels)
17 | obj_pw: 1.0 # obj BCELoss positive_weight
18 | iou_t: 0.20 # IoU training threshold
19 | anchor_t: 4.0 # anchor-multiple threshold
20 | # anchors: 3 # anchors per output layer (0 to ignore)
21 | fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
22 | hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
23 | hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
24 | hsv_v: 0.4 # image HSV-Value augmentation (fraction)
25 | degrees: 0.0 # image rotation (+/- deg)
26 | translate: 0.1 # image translation (+/- fraction)
27 | scale: 0.5 # image scale (+/- gain)
28 | shear: 0.0 # image shear (+/- deg)
29 | perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
30 | flipud: 0.0 # image flip up-down (probability)
31 | fliplr: 0.5 # image flip left-right (probability)
32 | mosaic: 1.0 # image mosaic (probability)
33 | mixup: 0.0 # image mixup (probability)
34 | copy_paste: 0.0 # segment copy-paste (probability)
35 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/hyps/hyp.scratch-med.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Hyperparameters for medium-augmentation COCO training from scratch
3 | # python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
4 | # See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
5 |
6 | lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
7 | lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
8 | momentum: 0.937 # SGD momentum/Adam beta1
9 | weight_decay: 0.0005 # optimizer weight decay 5e-4
10 | warmup_epochs: 3.0 # warmup epochs (fractions ok)
11 | warmup_momentum: 0.8 # warmup initial momentum
12 | warmup_bias_lr: 0.1 # warmup initial bias lr
13 | box: 0.05 # box loss gain
14 | cls: 0.3 # cls loss gain
15 | cls_pw: 1.0 # cls BCELoss positive_weight
16 | obj: 0.7 # obj loss gain (scale with pixels)
17 | obj_pw: 1.0 # obj BCELoss positive_weight
18 | iou_t: 0.20 # IoU training threshold
19 | anchor_t: 4.0 # anchor-multiple threshold
20 | # anchors: 3 # anchors per output layer (0 to ignore)
21 | fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
22 | hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
23 | hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
24 | hsv_v: 0.4 # image HSV-Value augmentation (fraction)
25 | degrees: 0.0 # image rotation (+/- deg)
26 | translate: 0.1 # image translation (+/- fraction)
27 | scale: 0.9 # image scale (+/- gain)
28 | shear: 0.0 # image shear (+/- deg)
29 | perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
30 | flipud: 0.0 # image flip up-down (probability)
31 | fliplr: 0.5 # image flip left-right (probability)
32 | mosaic: 1.0 # image mosaic (probability)
33 | mixup: 0.1 # image mixup (probability)
34 | copy_paste: 0.0 # segment copy-paste (probability)
35 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/hyps/hyp.scratch.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Hyperparameters for COCO training from scratch
3 | # python train.py --batch 40 --cfg yolov5m.yaml --weights '' --data coco.yaml --img 640 --epochs 300
4 | # See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
5 |
6 | lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
7 | lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
8 | momentum: 0.937 # SGD momentum/Adam beta1
9 | weight_decay: 0.0005 # optimizer weight decay 5e-4
10 | warmup_epochs: 3.0 # warmup epochs (fractions ok)
11 | warmup_momentum: 0.8 # warmup initial momentum
12 | warmup_bias_lr: 0.1 # warmup initial bias lr
13 | box: 0.05 # box loss gain
14 | cls: 0.5 # cls loss gain
15 | cls_pw: 1.0 # cls BCELoss positive_weight
16 | obj: 1.0 # obj loss gain (scale with pixels)
17 | obj_pw: 1.0 # obj BCELoss positive_weight
18 | iou_t: 0.20 # IoU training threshold
19 | anchor_t: 4.0 # anchor-multiple threshold
20 | # anchors: 3 # anchors per output layer (0 to ignore)
21 | fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
22 | hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
23 | hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
24 | hsv_v: 0.4 # image HSV-Value augmentation (fraction)
25 | degrees: 0.0 # image rotation (+/- deg)
26 | translate: 0.1 # image translation (+/- fraction)
27 | scale: 0.5 # image scale (+/- gain)
28 | shear: 0.0 # image shear (+/- deg)
29 | perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
30 | flipud: 0.0 # image flip up-down (probability)
31 | fliplr: 0.5 # image flip left-right (probability)
32 | mosaic: 1.0 # image mosaic (probability)
33 | mixup: 0.0 # image mixup (probability)
34 | copy_paste: 0.0 # segment copy-paste (probability)
35 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/images/bus.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/data/images/bus.jpg
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/images/zidane.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/data/images/zidane.jpg
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/data/scripts/download_weights.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
3 | # Download latest models from https://github.com/ultralytics/yolov5/releases
4 | # Example usage: bash path/to/download_weights.sh
5 | # parent
6 | # └── yolov5
7 | # ├── yolov5s.pt ← downloads here
8 | # ├── yolov5m.pt
9 | # └── ...
10 |
11 | python - <= cls >= 0, f'incorrect class index {cls}'
74 |
75 | # Write YOLO label
76 | if id not in shapes:
77 | shapes[id] = Image.open(file).size
78 | box = xyxy2xywhn(box[None].astype(np.float), w=shapes[id][0], h=shapes[id][1], clip=True)
79 | with open((labels / id).with_suffix('.txt'), 'a') as f:
80 | f.write(f"{cls} {' '.join(f'{x:.6f}' for x in box[0])}\n") # write label.txt
81 | except Exception as e:
82 | print(f'WARNING: skipping one label for {file}: {e}')
83 |
84 |
85 | # Download manually from https://challenge.xviewdataset.org
86 | dir = Path(yaml['path']) # dataset root dir
87 | # urls = ['https://d307kc0mrhucc3.cloudfront.net/train_labels.zip', # train labels
88 | # 'https://d307kc0mrhucc3.cloudfront.net/train_images.zip', # 15G, 847 train images
89 | # 'https://d307kc0mrhucc3.cloudfront.net/val_images.zip'] # 5G, 282 val images (no labels)
90 | # download(urls, dir=dir, delete=False)
91 |
92 | # Convert labels
93 | convert_labels(dir / 'xView_train.geojson')
94 |
95 | # Move images
96 | images = Path(dir / 'images')
97 | images.mkdir(parents=True, exist_ok=True)
98 | Path(dir / 'train_images').rename(dir / 'images' / 'train')
99 | Path(dir / 'val_images').rename(dir / 'images' / 'val')
100 |
101 | # Split
102 | autosplit(dir / 'images' / 'train')
103 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/main.py:
--------------------------------------------------------------------------------
1 | import argparse
2 | import os
3 | import sys
4 | from pathlib import Path
5 |
6 | import cv2
7 | import numpy as np
8 |
9 | import torch
10 | import torch.backends.cudnn as cudnn
11 |
12 | from yolov5_ros.models.common import DetectMultiBackend
13 | from yolov5_ros.utils.datasets import IMG_FORMATS, VID_FORMATS
14 | from yolov5_ros.utils.general import (LOGGER, check_img_size, check_imshow, non_max_suppression, scale_coords, xyxy2xywh)
15 | from yolov5_ros.utils.plots import Annotator, colors
16 | from yolov5_ros.utils.torch_utils import select_device, time_sync
17 |
18 | from yolov5_ros.utils.datasets import letterbox
19 |
20 | import rclpy
21 | from rclpy.node import Node
22 | from sensor_msgs.msg import Image
23 | from bboxes_ex_msgs.msg import BoundingBoxes, BoundingBox
24 | from std_msgs.msg import Header
25 | from cv_bridge import CvBridge
26 |
27 |
28 | class yolov5_demo():
29 | def __init__(self, weights,
30 | data,
31 | imagez_height,
32 | imagez_width,
33 | conf_thres,
34 | iou_thres,
35 | max_det,
36 | device,
37 | view_img,
38 | classes,
39 | agnostic_nms,
40 | line_thickness,
41 | half,
42 | dnn
43 | ):
44 | self.weights = weights
45 | self.data = data
46 | self.imagez_height = imagez_height
47 | self.imagez_width = imagez_width
48 | self.conf_thres = conf_thres
49 | self.iou_thres = iou_thres
50 | self.max_det = max_det
51 | self.device = device
52 | self.view_img = view_img
53 | self.classes = classes
54 | self.agnostic_nms = agnostic_nms
55 | self.line_thickness = line_thickness
56 | self.half = half
57 | self.dnn = dnn
58 |
59 | self.s = str()
60 |
61 | self.load_model()
62 |
63 | def load_model(self):
64 | imgsz = (self.imagez_height, self.imagez_width)
65 |
66 | # Load model
67 | self.device = select_device(self.device)
68 | self.model = DetectMultiBackend(self.weights, device=self.device, dnn=self.dnn, data=self.data)
69 | stride, self.names, pt, jit, onnx, engine = self.model.stride, self.model.names, self.model.pt, self.model.jit, self.model.onnx, self.model.engine
70 | imgsz = check_img_size(imgsz, s=stride) # check image size
71 |
72 | # Half
73 | self.half &= (pt or jit or onnx or engine) and self.device.type != 'cpu' # FP16 supported on limited backends with CUDA
74 | if pt or jit:
75 | self.model.model.half() if self.half else self.model.model.float()
76 |
77 | source = 0
78 | # Dataloader
79 | webcam = True
80 | if webcam:
81 | view_img = check_imshow()
82 | cudnn.benchmark = True
83 | bs = 1
84 | self.vid_path, self.vid_writer = [None] * bs, [None] * bs
85 |
86 | self.model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
87 | self.dt, self.seen = [0.0, 0.0, 0.0], 0
88 |
89 | # callback ==========================================================================
90 |
91 | # return ---------------------------------------
92 | # 1. class (str) +
93 | # 2. confidence (float) +
94 | # 3. x_min, y_min, x_max, y_max (float) +
95 | # ----------------------------------------------
96 | def image_callback(self, image_raw):
97 | class_list = []
98 | confidence_list = []
99 | x_min_list = []
100 | y_min_list = []
101 | x_max_list = []
102 | y_max_list = []
103 |
104 | # im is NDArray[_SCT@ascontiguousarray
105 | # im = im.transpose(2, 0, 1)
106 | self.stride = 32 # stride
107 | self.img_size = 640
108 | img = letterbox(image_raw, self.img_size, stride=self.stride)[0]
109 |
110 | # Convert
111 | img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
112 | im = np.ascontiguousarray(img)
113 |
114 | t1 = time_sync()
115 | im = torch.from_numpy(im).to(self.device)
116 | im = im.half() if self.half else im.float() # uint8 to fp16/32
117 | im /= 255 # 0 - 255 to 0.0 - 1.0
118 | if len(im.shape) == 3:
119 | im = im[None] # expand for batch dim
120 | t2 = time_sync()
121 | self.dt[0] += t2 - t1
122 |
123 | # Inference
124 | save_dir = "runs/detect/exp7"
125 | path = ['0']
126 |
127 | # visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
128 | pred = self.model(im, augment=False, visualize=False)
129 | t3 = time_sync()
130 | self.dt[1] += t3 - t2
131 |
132 | # NMS
133 | pred = non_max_suppression(pred, self.conf_thres, self.iou_thres, self.classes, self.agnostic_nms, max_det=self.max_det)
134 | self.dt[2] += time_sync() - t3
135 |
136 | # Process predictions
137 | for i, det in enumerate(pred):
138 | im0 = image_raw
139 | self.s += f'{i}: '
140 |
141 | # p = Path(str(p)) # to Path
142 | self.s += '%gx%g ' % im.shape[2:] # print string
143 | gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
144 | # imc = im0.copy() if save_crop else im0 # for save_crop
145 | annotator = Annotator(im0, line_width=self.line_thickness, example=str(self.names))
146 | if len(det):
147 | # Rescale boxes from img_size to im0 size
148 | det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
149 |
150 | # Print results
151 | for c in det[:, -1].unique():
152 | n = (det[:, -1] == c).sum() # detections per class
153 | self.s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
154 |
155 | for *xyxy, conf, cls in reversed(det):
156 | xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
157 | save_conf = False
158 | line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
159 |
160 | # Add bbox to image
161 | c = int(cls) # integer class
162 | label = f'{self.names[c]} {conf:.2f}'
163 | annotator.box_label(xyxy, label, color=colors(c, True))
164 |
165 | # print(xyxy, label)
166 | class_list.append(self.names[c])
167 | confidence_list.append(conf)
168 | # tensor to float
169 | x_min_list.append(xyxy[0].item())
170 | y_min_list.append(xyxy[1].item())
171 | x_max_list.append(xyxy[2].item())
172 | y_max_list.append(xyxy[3].item())
173 |
174 | # Stream results
175 | im0 = annotator.result()
176 | if self.view_img:
177 | cv2.imshow("yolov5", im0)
178 | cv2.waitKey(1) # 1 millisecond
179 |
180 | return class_list, confidence_list, x_min_list, y_min_list, x_max_list, y_max_list
181 |
182 | class yolov5_ros(Node):
183 | def __init__(self):
184 | super().__init__('yolov5_ros')
185 |
186 | self.bridge = CvBridge()
187 |
188 | self.pub_bbox = self.create_publisher(BoundingBoxes, 'yolov5/bounding_boxes', 10)
189 | self.pub_image = self.create_publisher(Image, 'yolov5/image_raw', 10)
190 |
191 | self.sub_image = self.create_subscription(Image, 'image_raw', self.image_callback,10)
192 |
193 | # parameter
194 | FILE = Path(__file__).resolve()
195 | ROOT = FILE.parents[0]
196 | if str(ROOT) not in sys.path:
197 | sys.path.append(str(ROOT)) # add ROOT to PATH
198 | ROOT = Path(os.path.relpath(ROOT, Path.cwd()))
199 |
200 | self.declare_parameter('weights', str(ROOT) + '/config/yolov5s.pt')
201 | self.declare_parameter('data', str(ROOT) + '/data/coco128.yaml')
202 | self.declare_parameter('imagez_height', 640)
203 | self.declare_parameter('imagez_width', 640)
204 | self.declare_parameter('conf_thres', 0.25)
205 | self.declare_parameter('iou_thres', 0.45)
206 | self.declare_parameter('max_det', 1000)
207 | self.declare_parameter('device', 'cpu')
208 | self.declare_parameter('view_img', True)
209 | self.declare_parameter('classes', None)
210 | self.declare_parameter('agnostic_nms', False)
211 | self.declare_parameter('line_thickness', 2)
212 | self.declare_parameter('half', False)
213 | self.declare_parameter('dnn', False)
214 |
215 | self.weights = self.get_parameter('weights').value
216 | self.data = self.get_parameter('data').value
217 | self.imagez_height = self.get_parameter('imagez_height').value
218 | self.imagez_width = self.get_parameter('imagez_width').value
219 | self.conf_thres = self.get_parameter('conf_thres').value
220 | self.iou_thres = self.get_parameter('iou_thres').value
221 | self.max_det = self.get_parameter('max_det').value
222 | self.device = self.get_parameter('device').value
223 | self.view_img = self.get_parameter('view_img').value
224 | self.classes = self.get_parameter('classes').value
225 | self.agnostic_nms = self.get_parameter('agnostic_nms').value
226 | self.line_thickness = self.get_parameter('line_thickness').value
227 | self.half = self.get_parameter('half').value
228 | self.dnn = self.get_parameter('dnn').value
229 |
230 | self.yolov5 = yolov5_demo(self.weights,
231 | self.data,
232 | self.imagez_height,
233 | self.imagez_width,
234 | self.conf_thres,
235 | self.iou_thres,
236 | self.max_det,
237 | self.device,
238 | self.view_img,
239 | self.classes,
240 | self.agnostic_nms,
241 | self.line_thickness,
242 | self.half,
243 | self.dnn)
244 |
245 |
246 | def yolovFive2bboxes_msgs(self, bboxes:list, scores:list, cls:list, img_header:Header):
247 | bboxes_msg = BoundingBoxes()
248 | bboxes_msg.header = img_header
249 | print(bboxes)
250 | # print(bbox[0][0])
251 | i = 0
252 | for score in scores:
253 | one_box = BoundingBox()
254 | one_box.xmin = int(bboxes[0][i])
255 | one_box.ymin = int(bboxes[1][i])
256 | one_box.xmax = int(bboxes[2][i])
257 | one_box.ymax = int(bboxes[3][i])
258 | one_box.probability = float(score)
259 | one_box.class_id = cls[i]
260 | bboxes_msg.bounding_boxes.append(one_box)
261 | i = i+1
262 |
263 | return bboxes_msg
264 |
265 |
266 | def image_callback(self, image:Image):
267 | image_raw = self.bridge.imgmsg_to_cv2(image, "bgr8")
268 | # return (class_list, confidence_list, x_min_list, y_min_list, x_max_list, y_max_list)
269 | class_list, confidence_list, x_min_list, y_min_list, x_max_list, y_max_list = self.yolov5.image_callback(image_raw)
270 |
271 | msg = self.yolovFive2bboxes_msgs(bboxes=[x_min_list, y_min_list, x_max_list, y_max_list], scores=confidence_list, cls=class_list, img_header=image.header)
272 | self.pub_bbox.publish(msg)
273 |
274 | self.pub_image.publish(image)
275 |
276 | print("start ==================")
277 | print(class_list, confidence_list, x_min_list, y_min_list, x_max_list, y_max_list)
278 | print("end ====================")
279 |
280 | def ros_main(args=None):
281 | rclpy.init(args=args)
282 | yolov5_node = yolov5_ros()
283 | rclpy.spin(yolov5_node)
284 | yolov5_node.destroy_node()
285 | rclpy.shutdown()
286 |
287 | if __name__ == '__main__':
288 | ros_main()
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/__init__.py:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/models/__init__.py
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/experimental.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Experimental modules
4 | """
5 | import math
6 |
7 | import numpy as np
8 | import torch
9 | import torch.nn as nn
10 |
11 | from yolov5_ros.models.common import Conv
12 | from yolov5_ros.utils.downloads import attempt_download
13 |
14 |
15 | class CrossConv(nn.Module):
16 | # Cross Convolution Downsample
17 | def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
18 | # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
19 | super().__init__()
20 | c_ = int(c2 * e) # hidden channels
21 | self.cv1 = Conv(c1, c_, (1, k), (1, s))
22 | self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
23 | self.add = shortcut and c1 == c2
24 |
25 | def forward(self, x):
26 | return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
27 |
28 |
29 | class Sum(nn.Module):
30 | # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
31 | def __init__(self, n, weight=False): # n: number of inputs
32 | super().__init__()
33 | self.weight = weight # apply weights boolean
34 | self.iter = range(n - 1) # iter object
35 | if weight:
36 | self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights
37 |
38 | def forward(self, x):
39 | y = x[0] # no weight
40 | if self.weight:
41 | w = torch.sigmoid(self.w) * 2
42 | for i in self.iter:
43 | y = y + x[i + 1] * w[i]
44 | else:
45 | for i in self.iter:
46 | y = y + x[i + 1]
47 | return y
48 |
49 |
50 | class MixConv2d(nn.Module):
51 | # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595
52 | def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy
53 | super().__init__()
54 | n = len(k) # number of convolutions
55 | if equal_ch: # equal c_ per group
56 | i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices
57 | c_ = [(i == g).sum() for g in range(n)] # intermediate channels
58 | else: # equal weight.numel() per group
59 | b = [c2] + [0] * n
60 | a = np.eye(n + 1, n, k=-1)
61 | a -= np.roll(a, 1, axis=1)
62 | a *= np.array(k) ** 2
63 | a[0] = 1
64 | c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
65 |
66 | self.m = nn.ModuleList([
67 | nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])
68 | self.bn = nn.BatchNorm2d(c2)
69 | self.act = nn.SiLU()
70 |
71 | def forward(self, x):
72 | return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
73 |
74 |
75 | class Ensemble(nn.ModuleList):
76 | # Ensemble of models
77 | def __init__(self):
78 | super().__init__()
79 |
80 | def forward(self, x, augment=False, profile=False, visualize=False):
81 | y = []
82 | for module in self:
83 | y.append(module(x, augment, profile, visualize)[0])
84 | # y = torch.stack(y).max(0)[0] # max ensemble
85 | # y = torch.stack(y).mean(0) # mean ensemble
86 | y = torch.cat(y, 1) # nms ensemble
87 | return y, None # inference, train output
88 |
89 |
90 | def attempt_load(weights, map_location=None, inplace=True, fuse=True):
91 | from models.yolo import Detect, Model
92 |
93 | # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
94 | model = Ensemble()
95 | for w in weights if isinstance(weights, list) else [weights]:
96 | ckpt = torch.load(attempt_download(w), map_location=map_location) # load
97 | ckpt = (ckpt.get('ema') or ckpt['model']).float() # FP32 model
98 | model.append(ckpt.fuse().eval() if fuse else ckpt.eval()) # fused or un-fused model in eval mode
99 |
100 | # Compatibility updates
101 | for m in model.modules():
102 | t = type(m)
103 | if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):
104 | m.inplace = inplace # torch 1.7.0 compatibility
105 | if t is Detect:
106 | if not isinstance(m.anchor_grid, list): # new Detect Layer compatibility
107 | delattr(m, 'anchor_grid')
108 | setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)
109 | elif t is Conv:
110 | m._non_persistent_buffers_set = set() # torch 1.6.0 compatibility
111 | elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
112 | m.recompute_scale_factor = None # torch 1.11.0 compatibility
113 |
114 | if len(model) == 1:
115 | return model[-1] # return model
116 | else:
117 | print(f'Ensemble created with {weights}\n')
118 | for k in ['names']:
119 | setattr(model, k, getattr(model[-1], k))
120 | model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride
121 | return model # return ensemble
122 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/anchors.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | # Default anchors for COCO data
3 |
4 |
5 | # P5 -------------------------------------------------------------------------------------------------------------------
6 | # P5-640:
7 | anchors_p5_640:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 |
13 | # P6 -------------------------------------------------------------------------------------------------------------------
14 | # P6-640: thr=0.25: 0.9964 BPR, 5.54 anchors past thr, n=12, img_size=640, metric_all=0.281/0.716-mean/best, past_thr=0.469-mean: 9,11, 21,19, 17,41, 43,32, 39,70, 86,64, 65,131, 134,130, 120,265, 282,180, 247,354, 512,387
15 | anchors_p6_640:
16 | - [9,11, 21,19, 17,41] # P3/8
17 | - [43,32, 39,70, 86,64] # P4/16
18 | - [65,131, 134,130, 120,265] # P5/32
19 | - [282,180, 247,354, 512,387] # P6/64
20 |
21 | # P6-1280: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1280, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 19,27, 44,40, 38,94, 96,68, 86,152, 180,137, 140,301, 303,264, 238,542, 436,615, 739,380, 925,792
22 | anchors_p6_1280:
23 | - [19,27, 44,40, 38,94] # P3/8
24 | - [96,68, 86,152, 180,137] # P4/16
25 | - [140,301, 303,264, 238,542] # P5/32
26 | - [436,615, 739,380, 925,792] # P6/64
27 |
28 | # P6-1920: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1920, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 28,41, 67,59, 57,141, 144,103, 129,227, 270,205, 209,452, 455,396, 358,812, 653,922, 1109,570, 1387,1187
29 | anchors_p6_1920:
30 | - [28,41, 67,59, 57,141] # P3/8
31 | - [144,103, 129,227, 270,205] # P4/16
32 | - [209,452, 455,396, 358,812] # P5/32
33 | - [653,922, 1109,570, 1387,1187] # P6/64
34 |
35 |
36 | # P7 -------------------------------------------------------------------------------------------------------------------
37 | # P7-640: thr=0.25: 0.9962 BPR, 6.76 anchors past thr, n=15, img_size=640, metric_all=0.275/0.733-mean/best, past_thr=0.466-mean: 11,11, 13,30, 29,20, 30,46, 61,38, 39,92, 78,80, 146,66, 79,163, 149,150, 321,143, 157,303, 257,402, 359,290, 524,372
38 | anchors_p7_640:
39 | - [11,11, 13,30, 29,20] # P3/8
40 | - [30,46, 61,38, 39,92] # P4/16
41 | - [78,80, 146,66, 79,163] # P5/32
42 | - [149,150, 321,143, 157,303] # P6/64
43 | - [257,402, 359,290, 524,372] # P7/128
44 |
45 | # P7-1280: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1280, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 19,22, 54,36, 32,77, 70,83, 138,71, 75,173, 165,159, 148,334, 375,151, 334,317, 251,626, 499,474, 750,326, 534,814, 1079,818
46 | anchors_p7_1280:
47 | - [19,22, 54,36, 32,77] # P3/8
48 | - [70,83, 138,71, 75,173] # P4/16
49 | - [165,159, 148,334, 375,151] # P5/32
50 | - [334,317, 251,626, 499,474] # P6/64
51 | - [750,326, 534,814, 1079,818] # P7/128
52 |
53 | # P7-1920: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1920, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 29,34, 81,55, 47,115, 105,124, 207,107, 113,259, 247,238, 222,500, 563,227, 501,476, 376,939, 749,711, 1126,489, 801,1222, 1618,1227
54 | anchors_p7_1920:
55 | - [29,34, 81,55, 47,115] # P3/8
56 | - [105,124, 207,107, 113,259] # P4/16
57 | - [247,238, 222,500, 563,227] # P5/32
58 | - [501,476, 376,939, 749,711] # P6/64
59 | - [1126,489, 801,1222, 1618,1227] # P7/128
60 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov3-spp.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # darknet53 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [32, 3, 1]], # 0
16 | [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
17 | [-1, 1, Bottleneck, [64]],
18 | [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
19 | [-1, 2, Bottleneck, [128]],
20 | [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
21 | [-1, 8, Bottleneck, [256]],
22 | [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
23 | [-1, 8, Bottleneck, [512]],
24 | [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
25 | [-1, 4, Bottleneck, [1024]], # 10
26 | ]
27 |
28 | # YOLOv3-SPP head
29 | head:
30 | [[-1, 1, Bottleneck, [1024, False]],
31 | [-1, 1, SPP, [512, [5, 9, 13]]],
32 | [-1, 1, Conv, [1024, 3, 1]],
33 | [-1, 1, Conv, [512, 1, 1]],
34 | [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
35 |
36 | [-2, 1, Conv, [256, 1, 1]],
37 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
38 | [[-1, 8], 1, Concat, [1]], # cat backbone P4
39 | [-1, 1, Bottleneck, [512, False]],
40 | [-1, 1, Bottleneck, [512, False]],
41 | [-1, 1, Conv, [256, 1, 1]],
42 | [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
43 |
44 | [-2, 1, Conv, [128, 1, 1]],
45 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
46 | [[-1, 6], 1, Concat, [1]], # cat backbone P3
47 | [-1, 1, Bottleneck, [256, False]],
48 | [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
49 |
50 | [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
51 | ]
52 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov3-tiny.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,14, 23,27, 37,58] # P4/16
9 | - [81,82, 135,169, 344,319] # P5/32
10 |
11 | # YOLOv3-tiny backbone
12 | backbone:
13 | # [from, number, module, args]
14 | [[-1, 1, Conv, [16, 3, 1]], # 0
15 | [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2
16 | [-1, 1, Conv, [32, 3, 1]],
17 | [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4
18 | [-1, 1, Conv, [64, 3, 1]],
19 | [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8
20 | [-1, 1, Conv, [128, 3, 1]],
21 | [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16
22 | [-1, 1, Conv, [256, 3, 1]],
23 | [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32
24 | [-1, 1, Conv, [512, 3, 1]],
25 | [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11
26 | [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12
27 | ]
28 |
29 | # YOLOv3-tiny head
30 | head:
31 | [[-1, 1, Conv, [1024, 3, 1]],
32 | [-1, 1, Conv, [256, 1, 1]],
33 | [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)
34 |
35 | [-2, 1, Conv, [128, 1, 1]],
36 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
37 | [[-1, 8], 1, Concat, [1]], # cat backbone P4
38 | [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)
39 |
40 | [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)
41 | ]
42 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov3.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # darknet53 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [32, 3, 1]], # 0
16 | [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
17 | [-1, 1, Bottleneck, [64]],
18 | [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
19 | [-1, 2, Bottleneck, [128]],
20 | [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
21 | [-1, 8, Bottleneck, [256]],
22 | [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
23 | [-1, 8, Bottleneck, [512]],
24 | [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
25 | [-1, 4, Bottleneck, [1024]], # 10
26 | ]
27 |
28 | # YOLOv3 head
29 | head:
30 | [[-1, 1, Bottleneck, [1024, False]],
31 | [-1, 1, Conv, [512, 1, 1]],
32 | [-1, 1, Conv, [1024, 3, 1]],
33 | [-1, 1, Conv, [512, 1, 1]],
34 | [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
35 |
36 | [-2, 1, Conv, [256, 1, 1]],
37 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
38 | [[-1, 8], 1, Concat, [1]], # cat backbone P4
39 | [-1, 1, Bottleneck, [512, False]],
40 | [-1, 1, Bottleneck, [512, False]],
41 | [-1, 1, Conv, [256, 1, 1]],
42 | [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
43 |
44 | [-2, 1, Conv, [128, 1, 1]],
45 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
46 | [[-1, 6], 1, Concat, [1]], # cat backbone P3
47 | [-1, 1, Bottleneck, [256, False]],
48 | [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
49 |
50 | [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
51 | ]
52 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-bifpn.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 BiFPN head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14, 6], 1, Concat, [1]], # cat P4 <--- BiFPN change
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-fpn.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 FPN head
28 | head:
29 | [[-1, 3, C3, [1024, False]], # 10 (P5/32-large)
30 |
31 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
32 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
33 | [-1, 1, Conv, [512, 1, 1]],
34 | [-1, 3, C3, [512, False]], # 14 (P4/16-medium)
35 |
36 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
37 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
38 | [-1, 1, Conv, [256, 1, 1]],
39 | [-1, 3, C3, [256, False]], # 18 (P3/8-small)
40 |
41 | [[18, 14, 10], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
42 | ]
43 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-p2.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors: 3 # AutoAnchor evolves 3 anchors per P output layer
8 |
9 | # YOLOv5 v6.0 backbone
10 | backbone:
11 | # [from, number, module, args]
12 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
13 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
14 | [-1, 3, C3, [128]],
15 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
16 | [-1, 6, C3, [256]],
17 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
18 | [-1, 9, C3, [512]],
19 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
20 | [-1, 3, C3, [1024]],
21 | [-1, 1, SPPF, [1024, 5]], # 9
22 | ]
23 |
24 | # YOLOv5 v6.0 head with (P2, P3, P4, P5) outputs
25 | head:
26 | [[-1, 1, Conv, [512, 1, 1]],
27 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
28 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
29 | [-1, 3, C3, [512, False]], # 13
30 |
31 | [-1, 1, Conv, [256, 1, 1]],
32 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
33 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
34 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
35 |
36 | [-1, 1, Conv, [128, 1, 1]],
37 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
38 | [[-1, 2], 1, Concat, [1]], # cat backbone P2
39 | [-1, 1, C3, [128, False]], # 21 (P2/4-xsmall)
40 |
41 | [-1, 1, Conv, [128, 3, 2]],
42 | [[-1, 18], 1, Concat, [1]], # cat head P3
43 | [-1, 3, C3, [256, False]], # 24 (P3/8-small)
44 |
45 | [-1, 1, Conv, [256, 3, 2]],
46 | [[-1, 14], 1, Concat, [1]], # cat head P4
47 | [-1, 3, C3, [512, False]], # 27 (P4/16-medium)
48 |
49 | [-1, 1, Conv, [512, 3, 2]],
50 | [[-1, 10], 1, Concat, [1]], # cat head P5
51 | [-1, 3, C3, [1024, False]], # 30 (P5/32-large)
52 |
53 | [[21, 24, 27, 30], 1, Detect, [nc, anchors]], # Detect(P2, P3, P4, P5)
54 | ]
55 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-p34.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.50 # layer channel multiple
7 | anchors: 3 # AutoAnchor evolves 3 anchors per P output layer
8 |
9 | # YOLOv5 v6.0 backbone
10 | backbone:
11 | # [from, number, module, args]
12 | [ [ -1, 1, Conv, [ 64, 6, 2, 2 ] ], # 0-P1/2
13 | [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
14 | [ -1, 3, C3, [ 128 ] ],
15 | [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
16 | [ -1, 6, C3, [ 256 ] ],
17 | [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
18 | [ -1, 9, C3, [ 512 ] ],
19 | [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 7-P5/32
20 | [ -1, 3, C3, [ 1024 ] ],
21 | [ -1, 1, SPPF, [ 1024, 5 ] ], # 9
22 | ]
23 |
24 | # YOLOv5 v6.0 head with (P3, P4) outputs
25 | head:
26 | [ [ -1, 1, Conv, [ 512, 1, 1 ] ],
27 | [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
28 | [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
29 | [ -1, 3, C3, [ 512, False ] ], # 13
30 |
31 | [ -1, 1, Conv, [ 256, 1, 1 ] ],
32 | [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
33 | [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
34 | [ -1, 3, C3, [ 256, False ] ], # 17 (P3/8-small)
35 |
36 | [ -1, 1, Conv, [ 256, 3, 2 ] ],
37 | [ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P4
38 | [ -1, 3, C3, [ 512, False ] ], # 20 (P4/16-medium)
39 |
40 | [ [ 17, 20 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4)
41 | ]
42 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-p6.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors: 3 # AutoAnchor evolves 3 anchors per P output layer
8 |
9 | # YOLOv5 v6.0 backbone
10 | backbone:
11 | # [from, number, module, args]
12 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
13 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
14 | [-1, 3, C3, [128]],
15 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
16 | [-1, 6, C3, [256]],
17 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
18 | [-1, 9, C3, [512]],
19 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
20 | [-1, 3, C3, [768]],
21 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
22 | [-1, 3, C3, [1024]],
23 | [-1, 1, SPPF, [1024, 5]], # 11
24 | ]
25 |
26 | # YOLOv5 v6.0 head with (P3, P4, P5, P6) outputs
27 | head:
28 | [[-1, 1, Conv, [768, 1, 1]],
29 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
30 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
31 | [-1, 3, C3, [768, False]], # 15
32 |
33 | [-1, 1, Conv, [512, 1, 1]],
34 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
35 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
36 | [-1, 3, C3, [512, False]], # 19
37 |
38 | [-1, 1, Conv, [256, 1, 1]],
39 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
40 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
41 | [-1, 3, C3, [256, False]], # 23 (P3/8-small)
42 |
43 | [-1, 1, Conv, [256, 3, 2]],
44 | [[-1, 20], 1, Concat, [1]], # cat head P4
45 | [-1, 3, C3, [512, False]], # 26 (P4/16-medium)
46 |
47 | [-1, 1, Conv, [512, 3, 2]],
48 | [[-1, 16], 1, Concat, [1]], # cat head P5
49 | [-1, 3, C3, [768, False]], # 29 (P5/32-large)
50 |
51 | [-1, 1, Conv, [768, 3, 2]],
52 | [[-1, 12], 1, Concat, [1]], # cat head P6
53 | [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)
54 |
55 | [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
56 | ]
57 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-p7.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors: 3 # AutoAnchor evolves 3 anchors per P output layer
8 |
9 | # YOLOv5 v6.0 backbone
10 | backbone:
11 | # [from, number, module, args]
12 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
13 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
14 | [-1, 3, C3, [128]],
15 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
16 | [-1, 6, C3, [256]],
17 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
18 | [-1, 9, C3, [512]],
19 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
20 | [-1, 3, C3, [768]],
21 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
22 | [-1, 3, C3, [1024]],
23 | [-1, 1, Conv, [1280, 3, 2]], # 11-P7/128
24 | [-1, 3, C3, [1280]],
25 | [-1, 1, SPPF, [1280, 5]], # 13
26 | ]
27 |
28 | # YOLOv5 v6.0 head with (P3, P4, P5, P6, P7) outputs
29 | head:
30 | [[-1, 1, Conv, [1024, 1, 1]],
31 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
32 | [[-1, 10], 1, Concat, [1]], # cat backbone P6
33 | [-1, 3, C3, [1024, False]], # 17
34 |
35 | [-1, 1, Conv, [768, 1, 1]],
36 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
37 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
38 | [-1, 3, C3, [768, False]], # 21
39 |
40 | [-1, 1, Conv, [512, 1, 1]],
41 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
42 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
43 | [-1, 3, C3, [512, False]], # 25
44 |
45 | [-1, 1, Conv, [256, 1, 1]],
46 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
47 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
48 | [-1, 3, C3, [256, False]], # 29 (P3/8-small)
49 |
50 | [-1, 1, Conv, [256, 3, 2]],
51 | [[-1, 26], 1, Concat, [1]], # cat head P4
52 | [-1, 3, C3, [512, False]], # 32 (P4/16-medium)
53 |
54 | [-1, 1, Conv, [512, 3, 2]],
55 | [[-1, 22], 1, Concat, [1]], # cat head P5
56 | [-1, 3, C3, [768, False]], # 35 (P5/32-large)
57 |
58 | [-1, 1, Conv, [768, 3, 2]],
59 | [[-1, 18], 1, Concat, [1]], # cat head P6
60 | [-1, 3, C3, [1024, False]], # 38 (P6/64-xlarge)
61 |
62 | [-1, 1, Conv, [1024, 3, 2]],
63 | [[-1, 14], 1, Concat, [1]], # cat head P7
64 | [-1, 3, C3, [1280, False]], # 41 (P7/128-xxlarge)
65 |
66 | [[29, 32, 35, 38, 41], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6, P7)
67 | ]
68 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5-panet.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 PANet head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5l6.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [19,27, 44,40, 38,94] # P3/8
9 | - [96,68, 86,152, 180,137] # P4/16
10 | - [140,301, 303,264, 238,542] # P5/32
11 | - [436,615, 739,380, 925,792] # P6/64
12 |
13 | # YOLOv5 v6.0 backbone
14 | backbone:
15 | # [from, number, module, args]
16 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
17 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
18 | [-1, 3, C3, [128]],
19 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
20 | [-1, 6, C3, [256]],
21 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
22 | [-1, 9, C3, [512]],
23 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
24 | [-1, 3, C3, [768]],
25 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
26 | [-1, 3, C3, [1024]],
27 | [-1, 1, SPPF, [1024, 5]], # 11
28 | ]
29 |
30 | # YOLOv5 v6.0 head
31 | head:
32 | [[-1, 1, Conv, [768, 1, 1]],
33 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
34 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
35 | [-1, 3, C3, [768, False]], # 15
36 |
37 | [-1, 1, Conv, [512, 1, 1]],
38 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
39 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
40 | [-1, 3, C3, [512, False]], # 19
41 |
42 | [-1, 1, Conv, [256, 1, 1]],
43 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
44 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
45 | [-1, 3, C3, [256, False]], # 23 (P3/8-small)
46 |
47 | [-1, 1, Conv, [256, 3, 2]],
48 | [[-1, 20], 1, Concat, [1]], # cat head P4
49 | [-1, 3, C3, [512, False]], # 26 (P4/16-medium)
50 |
51 | [-1, 1, Conv, [512, 3, 2]],
52 | [[-1, 16], 1, Concat, [1]], # cat head P5
53 | [-1, 3, C3, [768, False]], # 29 (P5/32-large)
54 |
55 | [-1, 1, Conv, [768, 3, 2]],
56 | [[-1, 12], 1, Concat, [1]], # cat head P6
57 | [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)
58 |
59 | [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
60 | ]
61 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5m6.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.67 # model depth multiple
6 | width_multiple: 0.75 # layer channel multiple
7 | anchors:
8 | - [19,27, 44,40, 38,94] # P3/8
9 | - [96,68, 86,152, 180,137] # P4/16
10 | - [140,301, 303,264, 238,542] # P5/32
11 | - [436,615, 739,380, 925,792] # P6/64
12 |
13 | # YOLOv5 v6.0 backbone
14 | backbone:
15 | # [from, number, module, args]
16 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
17 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
18 | [-1, 3, C3, [128]],
19 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
20 | [-1, 6, C3, [256]],
21 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
22 | [-1, 9, C3, [512]],
23 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
24 | [-1, 3, C3, [768]],
25 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
26 | [-1, 3, C3, [1024]],
27 | [-1, 1, SPPF, [1024, 5]], # 11
28 | ]
29 |
30 | # YOLOv5 v6.0 head
31 | head:
32 | [[-1, 1, Conv, [768, 1, 1]],
33 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
34 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
35 | [-1, 3, C3, [768, False]], # 15
36 |
37 | [-1, 1, Conv, [512, 1, 1]],
38 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
39 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
40 | [-1, 3, C3, [512, False]], # 19
41 |
42 | [-1, 1, Conv, [256, 1, 1]],
43 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
44 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
45 | [-1, 3, C3, [256, False]], # 23 (P3/8-small)
46 |
47 | [-1, 1, Conv, [256, 3, 2]],
48 | [[-1, 20], 1, Concat, [1]], # cat head P4
49 | [-1, 3, C3, [512, False]], # 26 (P4/16-medium)
50 |
51 | [-1, 1, Conv, [512, 3, 2]],
52 | [[-1, 16], 1, Concat, [1]], # cat head P5
53 | [-1, 3, C3, [768, False]], # 29 (P5/32-large)
54 |
55 | [-1, 1, Conv, [768, 3, 2]],
56 | [[-1, 12], 1, Concat, [1]], # cat head P6
57 | [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)
58 |
59 | [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
60 | ]
61 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5n6.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.25 # layer channel multiple
7 | anchors:
8 | - [19,27, 44,40, 38,94] # P3/8
9 | - [96,68, 86,152, 180,137] # P4/16
10 | - [140,301, 303,264, 238,542] # P5/32
11 | - [436,615, 739,380, 925,792] # P6/64
12 |
13 | # YOLOv5 v6.0 backbone
14 | backbone:
15 | # [from, number, module, args]
16 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
17 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
18 | [-1, 3, C3, [128]],
19 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
20 | [-1, 6, C3, [256]],
21 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
22 | [-1, 9, C3, [512]],
23 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
24 | [-1, 3, C3, [768]],
25 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
26 | [-1, 3, C3, [1024]],
27 | [-1, 1, SPPF, [1024, 5]], # 11
28 | ]
29 |
30 | # YOLOv5 v6.0 head
31 | head:
32 | [[-1, 1, Conv, [768, 1, 1]],
33 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
34 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
35 | [-1, 3, C3, [768, False]], # 15
36 |
37 | [-1, 1, Conv, [512, 1, 1]],
38 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
39 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
40 | [-1, 3, C3, [512, False]], # 19
41 |
42 | [-1, 1, Conv, [256, 1, 1]],
43 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
44 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
45 | [-1, 3, C3, [256, False]], # 23 (P3/8-small)
46 |
47 | [-1, 1, Conv, [256, 3, 2]],
48 | [[-1, 20], 1, Concat, [1]], # cat head P4
49 | [-1, 3, C3, [512, False]], # 26 (P4/16-medium)
50 |
51 | [-1, 1, Conv, [512, 3, 2]],
52 | [[-1, 16], 1, Concat, [1]], # cat head P5
53 | [-1, 3, C3, [768, False]], # 29 (P5/32-large)
54 |
55 | [-1, 1, Conv, [768, 3, 2]],
56 | [[-1, 12], 1, Concat, [1]], # cat head P6
57 | [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)
58 |
59 | [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
60 | ]
61 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5s-ghost.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.50 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, GhostConv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3Ghost, [128]],
18 | [-1, 1, GhostConv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3Ghost, [256]],
20 | [-1, 1, GhostConv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3Ghost, [512]],
22 | [-1, 1, GhostConv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3Ghost, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, GhostConv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3Ghost, [512, False]], # 13
33 |
34 | [-1, 1, GhostConv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3Ghost, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, GhostConv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3Ghost, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, GhostConv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3Ghost, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5s-transformer.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.50 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3TR, [1024]], # 9 <--- C3TR() Transformer module
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5s6.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.50 # layer channel multiple
7 | anchors:
8 | - [19,27, 44,40, 38,94] # P3/8
9 | - [96,68, 86,152, 180,137] # P4/16
10 | - [140,301, 303,264, 238,542] # P5/32
11 | - [436,615, 739,380, 925,792] # P6/64
12 |
13 | # YOLOv5 v6.0 backbone
14 | backbone:
15 | # [from, number, module, args]
16 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
17 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
18 | [-1, 3, C3, [128]],
19 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
20 | [-1, 6, C3, [256]],
21 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
22 | [-1, 9, C3, [512]],
23 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
24 | [-1, 3, C3, [768]],
25 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
26 | [-1, 3, C3, [1024]],
27 | [-1, 1, SPPF, [1024, 5]], # 11
28 | ]
29 |
30 | # YOLOv5 v6.0 head
31 | head:
32 | [[-1, 1, Conv, [768, 1, 1]],
33 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
34 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
35 | [-1, 3, C3, [768, False]], # 15
36 |
37 | [-1, 1, Conv, [512, 1, 1]],
38 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
39 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
40 | [-1, 3, C3, [512, False]], # 19
41 |
42 | [-1, 1, Conv, [256, 1, 1]],
43 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
44 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
45 | [-1, 3, C3, [256, False]], # 23 (P3/8-small)
46 |
47 | [-1, 1, Conv, [256, 3, 2]],
48 | [[-1, 20], 1, Concat, [1]], # cat head P4
49 | [-1, 3, C3, [512, False]], # 26 (P4/16-medium)
50 |
51 | [-1, 1, Conv, [512, 3, 2]],
52 | [[-1, 16], 1, Concat, [1]], # cat head P5
53 | [-1, 3, C3, [768, False]], # 29 (P5/32-large)
54 |
55 | [-1, 1, Conv, [768, 3, 2]],
56 | [[-1, 12], 1, Concat, [1]], # cat head P6
57 | [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)
58 |
59 | [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
60 | ]
61 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/hub/yolov5x6.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.33 # model depth multiple
6 | width_multiple: 1.25 # layer channel multiple
7 | anchors:
8 | - [19,27, 44,40, 38,94] # P3/8
9 | - [96,68, 86,152, 180,137] # P4/16
10 | - [140,301, 303,264, 238,542] # P5/32
11 | - [436,615, 739,380, 925,792] # P6/64
12 |
13 | # YOLOv5 v6.0 backbone
14 | backbone:
15 | # [from, number, module, args]
16 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
17 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
18 | [-1, 3, C3, [128]],
19 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
20 | [-1, 6, C3, [256]],
21 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
22 | [-1, 9, C3, [512]],
23 | [-1, 1, Conv, [768, 3, 2]], # 7-P5/32
24 | [-1, 3, C3, [768]],
25 | [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
26 | [-1, 3, C3, [1024]],
27 | [-1, 1, SPPF, [1024, 5]], # 11
28 | ]
29 |
30 | # YOLOv5 v6.0 head
31 | head:
32 | [[-1, 1, Conv, [768, 1, 1]],
33 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
34 | [[-1, 8], 1, Concat, [1]], # cat backbone P5
35 | [-1, 3, C3, [768, False]], # 15
36 |
37 | [-1, 1, Conv, [512, 1, 1]],
38 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
39 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
40 | [-1, 3, C3, [512, False]], # 19
41 |
42 | [-1, 1, Conv, [256, 1, 1]],
43 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
44 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
45 | [-1, 3, C3, [256, False]], # 23 (P3/8-small)
46 |
47 | [-1, 1, Conv, [256, 3, 2]],
48 | [[-1, 20], 1, Concat, [1]], # cat head P4
49 | [-1, 3, C3, [512, False]], # 26 (P4/16-medium)
50 |
51 | [-1, 1, Conv, [512, 3, 2]],
52 | [[-1, 16], 1, Concat, [1]], # cat head P5
53 | [-1, 3, C3, [768, False]], # 29 (P5/32-large)
54 |
55 | [-1, 1, Conv, [768, 3, 2]],
56 | [[-1, 12], 1, Concat, [1]], # cat head P6
57 | [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)
58 |
59 | [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
60 | ]
61 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/yolov5l.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.0 # model depth multiple
6 | width_multiple: 1.0 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/yolov5m.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.67 # model depth multiple
6 | width_multiple: 0.75 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/yolov5n.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.25 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/yolov5s.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 0.33 # model depth multiple
6 | width_multiple: 0.50 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/models/yolov5x.yaml:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 |
3 | # Parameters
4 | nc: 80 # number of classes
5 | depth_multiple: 1.33 # model depth multiple
6 | width_multiple: 1.25 # layer channel multiple
7 | anchors:
8 | - [10,13, 16,30, 33,23] # P3/8
9 | - [30,61, 62,45, 59,119] # P4/16
10 | - [116,90, 156,198, 373,326] # P5/32
11 |
12 | # YOLOv5 v6.0 backbone
13 | backbone:
14 | # [from, number, module, args]
15 | [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
16 | [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
17 | [-1, 3, C3, [128]],
18 | [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
19 | [-1, 6, C3, [256]],
20 | [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
21 | [-1, 9, C3, [512]],
22 | [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
23 | [-1, 3, C3, [1024]],
24 | [-1, 1, SPPF, [1024, 5]], # 9
25 | ]
26 |
27 | # YOLOv5 v6.0 head
28 | head:
29 | [[-1, 1, Conv, [512, 1, 1]],
30 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
31 | [[-1, 6], 1, Concat, [1]], # cat backbone P4
32 | [-1, 3, C3, [512, False]], # 13
33 |
34 | [-1, 1, Conv, [256, 1, 1]],
35 | [-1, 1, nn.Upsample, [None, 2, 'nearest']],
36 | [[-1, 4], 1, Concat, [1]], # cat backbone P3
37 | [-1, 3, C3, [256, False]], # 17 (P3/8-small)
38 |
39 | [-1, 1, Conv, [256, 3, 2]],
40 | [[-1, 14], 1, Concat, [1]], # cat head P4
41 | [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
42 |
43 | [-1, 1, Conv, [512, 3, 2]],
44 | [[-1, 10], 1, Concat, [1]], # cat head P5
45 | [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
46 |
47 | [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
48 | ]
49 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/__init__.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | utils/initialization
4 | """
5 |
6 |
7 | def notebook_init(verbose=True):
8 | # Check system software and hardware
9 | print('Checking setup...')
10 |
11 | import os
12 | import shutil
13 |
14 | from utils.general import check_requirements, emojis, is_colab
15 | from utils.torch_utils import select_device # imports
16 |
17 | check_requirements(('psutil', 'IPython'))
18 | import psutil
19 | from IPython import display # to display images and clear console output
20 |
21 | if is_colab():
22 | shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
23 |
24 | # System info
25 | if verbose:
26 | gb = 1 << 30 # bytes to GiB (1024 ** 3)
27 | ram = psutil.virtual_memory().total
28 | total, used, free = shutil.disk_usage("/")
29 | display.clear_output()
30 | s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
31 | else:
32 | s = ''
33 |
34 | select_device(newline=False)
35 | print(emojis(f'Setup complete ✅ {s}'))
36 | return display
37 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/activations.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Activation functions
4 | """
5 |
6 | import torch
7 | import torch.nn as nn
8 | import torch.nn.functional as F
9 |
10 |
11 | class SiLU(nn.Module):
12 | # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
13 | @staticmethod
14 | def forward(x):
15 | return x * torch.sigmoid(x)
16 |
17 |
18 | class Hardswish(nn.Module):
19 | # Hard-SiLU activation
20 | @staticmethod
21 | def forward(x):
22 | # return x * F.hardsigmoid(x) # for TorchScript and CoreML
23 | return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
24 |
25 |
26 | class Mish(nn.Module):
27 | # Mish activation https://github.com/digantamisra98/Mish
28 | @staticmethod
29 | def forward(x):
30 | return x * F.softplus(x).tanh()
31 |
32 |
33 | class MemoryEfficientMish(nn.Module):
34 | # Mish activation memory-efficient
35 | class F(torch.autograd.Function):
36 |
37 | @staticmethod
38 | def forward(ctx, x):
39 | ctx.save_for_backward(x)
40 | return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
41 |
42 | @staticmethod
43 | def backward(ctx, grad_output):
44 | x = ctx.saved_tensors[0]
45 | sx = torch.sigmoid(x)
46 | fx = F.softplus(x).tanh()
47 | return grad_output * (fx + x * sx * (1 - fx * fx))
48 |
49 | def forward(self, x):
50 | return self.F.apply(x)
51 |
52 |
53 | class FReLU(nn.Module):
54 | # FReLU activation https://arxiv.org/abs/2007.11824
55 | def __init__(self, c1, k=3): # ch_in, kernel
56 | super().__init__()
57 | self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
58 | self.bn = nn.BatchNorm2d(c1)
59 |
60 | def forward(self, x):
61 | return torch.max(x, self.bn(self.conv(x)))
62 |
63 |
64 | class AconC(nn.Module):
65 | r""" ACON activation (activate or not)
66 | AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
67 | according to "Activate or Not: Learning Customized Activation" .
68 | """
69 |
70 | def __init__(self, c1):
71 | super().__init__()
72 | self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
73 | self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
74 | self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
75 |
76 | def forward(self, x):
77 | dpx = (self.p1 - self.p2) * x
78 | return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
79 |
80 |
81 | class MetaAconC(nn.Module):
82 | r""" ACON activation (activate or not)
83 | MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
84 | according to "Activate or Not: Learning Customized Activation" .
85 | """
86 |
87 | def __init__(self, c1, k=1, s=1, r=16): # ch_in, kernel, stride, r
88 | super().__init__()
89 | c2 = max(r, c1 // r)
90 | self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
91 | self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
92 | self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
93 | self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
94 | # self.bn1 = nn.BatchNorm2d(c2)
95 | # self.bn2 = nn.BatchNorm2d(c1)
96 |
97 | def forward(self, x):
98 | y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
99 | # batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
100 | # beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
101 | beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
102 | dpx = (self.p1 - self.p2) * x
103 | return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
104 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/augmentations.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Image augmentation functions
4 | """
5 |
6 | import math
7 | import random
8 |
9 | import cv2
10 | import numpy as np
11 |
12 | from yolov5_ros.utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
13 | from yolov5_ros.utils.metrics import bbox_ioa
14 |
15 |
16 | class Albumentations:
17 | # YOLOv5 Albumentations class (optional, only used if package is installed)
18 | def __init__(self):
19 | self.transform = None
20 | try:
21 | import albumentations as A
22 | check_version(A.__version__, '1.0.3', hard=True) # version requirement
23 |
24 | T = [
25 | A.Blur(p=0.01),
26 | A.MedianBlur(p=0.01),
27 | A.ToGray(p=0.01),
28 | A.CLAHE(p=0.01),
29 | A.RandomBrightnessContrast(p=0.0),
30 | A.RandomGamma(p=0.0),
31 | A.ImageCompression(quality_lower=75, p=0.0)] # transforms
32 | self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
33 |
34 | LOGGER.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
35 | except ImportError: # package not installed, skip
36 | pass
37 | except Exception as e:
38 | LOGGER.info(colorstr('albumentations: ') + f'{e}')
39 |
40 | def __call__(self, im, labels, p=1.0):
41 | if self.transform and random.random() < p:
42 | new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
43 | im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
44 | return im, labels
45 |
46 |
47 | def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
48 | # HSV color-space augmentation
49 | if hgain or sgain or vgain:
50 | r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
51 | hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
52 | dtype = im.dtype # uint8
53 |
54 | x = np.arange(0, 256, dtype=r.dtype)
55 | lut_hue = ((x * r[0]) % 180).astype(dtype)
56 | lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
57 | lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
58 |
59 | im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
60 | cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
61 |
62 |
63 | def hist_equalize(im, clahe=True, bgr=False):
64 | # Equalize histogram on BGR image 'im' with im.shape(n,m,3) and range 0-255
65 | yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
66 | if clahe:
67 | c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
68 | yuv[:, :, 0] = c.apply(yuv[:, :, 0])
69 | else:
70 | yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
71 | return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
72 |
73 |
74 | def replicate(im, labels):
75 | # Replicate labels
76 | h, w = im.shape[:2]
77 | boxes = labels[:, 1:].astype(int)
78 | x1, y1, x2, y2 = boxes.T
79 | s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
80 | for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
81 | x1b, y1b, x2b, y2b = boxes[i]
82 | bh, bw = y2b - y1b, x2b - x1b
83 | yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
84 | x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
85 | im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
86 | labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
87 |
88 | return im, labels
89 |
90 |
91 | def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
92 | # Resize and pad image while meeting stride-multiple constraints
93 | shape = im.shape[:2] # current shape [height, width]
94 | if isinstance(new_shape, int):
95 | new_shape = (new_shape, new_shape)
96 |
97 | # Scale ratio (new / old)
98 | r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
99 | if not scaleup: # only scale down, do not scale up (for better val mAP)
100 | r = min(r, 1.0)
101 |
102 | # Compute padding
103 | ratio = r, r # width, height ratios
104 | new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
105 | dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
106 | if auto: # minimum rectangle
107 | dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
108 | elif scaleFill: # stretch
109 | dw, dh = 0.0, 0.0
110 | new_unpad = (new_shape[1], new_shape[0])
111 | ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
112 |
113 | dw /= 2 # divide padding into 2 sides
114 | dh /= 2
115 |
116 | if shape[::-1] != new_unpad: # resize
117 | im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
118 | top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
119 | left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
120 | im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
121 | return im, ratio, (dw, dh)
122 |
123 |
124 | def random_perspective(im,
125 | targets=(),
126 | segments=(),
127 | degrees=10,
128 | translate=.1,
129 | scale=.1,
130 | shear=10,
131 | perspective=0.0,
132 | border=(0, 0)):
133 | # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
134 | # targets = [cls, xyxy]
135 |
136 | height = im.shape[0] + border[0] * 2 # shape(h,w,c)
137 | width = im.shape[1] + border[1] * 2
138 |
139 | # Center
140 | C = np.eye(3)
141 | C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
142 | C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
143 |
144 | # Perspective
145 | P = np.eye(3)
146 | P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
147 | P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
148 |
149 | # Rotation and Scale
150 | R = np.eye(3)
151 | a = random.uniform(-degrees, degrees)
152 | # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
153 | s = random.uniform(1 - scale, 1 + scale)
154 | # s = 2 ** random.uniform(-scale, scale)
155 | R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
156 |
157 | # Shear
158 | S = np.eye(3)
159 | S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
160 | S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
161 |
162 | # Translation
163 | T = np.eye(3)
164 | T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
165 | T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
166 |
167 | # Combined rotation matrix
168 | M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
169 | if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
170 | if perspective:
171 | im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
172 | else: # affine
173 | im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
174 |
175 | # Visualize
176 | # import matplotlib.pyplot as plt
177 | # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
178 | # ax[0].imshow(im[:, :, ::-1]) # base
179 | # ax[1].imshow(im2[:, :, ::-1]) # warped
180 |
181 | # Transform label coordinates
182 | n = len(targets)
183 | if n:
184 | use_segments = any(x.any() for x in segments)
185 | new = np.zeros((n, 4))
186 | if use_segments: # warp segments
187 | segments = resample_segments(segments) # upsample
188 | for i, segment in enumerate(segments):
189 | xy = np.ones((len(segment), 3))
190 | xy[:, :2] = segment
191 | xy = xy @ M.T # transform
192 | xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
193 |
194 | # clip
195 | new[i] = segment2box(xy, width, height)
196 |
197 | else: # warp boxes
198 | xy = np.ones((n * 4, 3))
199 | xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
200 | xy = xy @ M.T # transform
201 | xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
202 |
203 | # create new boxes
204 | x = xy[:, [0, 2, 4, 6]]
205 | y = xy[:, [1, 3, 5, 7]]
206 | new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
207 |
208 | # clip
209 | new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
210 | new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
211 |
212 | # filter candidates
213 | i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
214 | targets = targets[i]
215 | targets[:, 1:5] = new[i]
216 |
217 | return im, targets
218 |
219 |
220 | def copy_paste(im, labels, segments, p=0.5):
221 | # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
222 | n = len(segments)
223 | if p and n:
224 | h, w, c = im.shape # height, width, channels
225 | im_new = np.zeros(im.shape, np.uint8)
226 | for j in random.sample(range(n), k=round(p * n)):
227 | l, s = labels[j], segments[j]
228 | box = w - l[3], l[2], w - l[1], l[4]
229 | ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
230 | if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
231 | labels = np.concatenate((labels, [[l[0], *box]]), 0)
232 | segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
233 | cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
234 |
235 | result = cv2.bitwise_and(src1=im, src2=im_new)
236 | result = cv2.flip(result, 1) # augment segments (flip left-right)
237 | i = result > 0 # pixels to replace
238 | # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
239 | im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
240 |
241 | return im, labels, segments
242 |
243 |
244 | def cutout(im, labels, p=0.5):
245 | # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
246 | if random.random() < p:
247 | h, w = im.shape[:2]
248 | scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
249 | for s in scales:
250 | mask_h = random.randint(1, int(h * s)) # create random masks
251 | mask_w = random.randint(1, int(w * s))
252 |
253 | # box
254 | xmin = max(0, random.randint(0, w) - mask_w // 2)
255 | ymin = max(0, random.randint(0, h) - mask_h // 2)
256 | xmax = min(w, xmin + mask_w)
257 | ymax = min(h, ymin + mask_h)
258 |
259 | # apply random color mask
260 | im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
261 |
262 | # return unobscured labels
263 | if len(labels) and s > 0.03:
264 | box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
265 | ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
266 | labels = labels[ioa < 0.60] # remove >60% obscured labels
267 |
268 | return labels
269 |
270 |
271 | def mixup(im, labels, im2, labels2):
272 | # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
273 | r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
274 | im = (im * r + im2 * (1 - r)).astype(np.uint8)
275 | labels = np.concatenate((labels, labels2), 0)
276 | return im, labels
277 |
278 |
279 | def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
280 | # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
281 | w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
282 | w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
283 | ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
284 | return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
285 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/autoanchor.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | AutoAnchor utils
4 | """
5 |
6 | import random
7 |
8 | import numpy as np
9 | import torch
10 | import yaml
11 | from tqdm.auto import tqdm
12 |
13 | from yolov5_ros.utils.general import LOGGER, colorstr, emojis
14 |
15 | PREFIX = colorstr('AutoAnchor: ')
16 |
17 |
18 | def check_anchor_order(m):
19 | # Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary
20 | a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
21 | da = a[-1] - a[0] # delta a
22 | ds = m.stride[-1] - m.stride[0] # delta s
23 | if da and (da.sign() != ds.sign()): # same order
24 | LOGGER.info(f'{PREFIX}Reversing anchor order')
25 | m.anchors[:] = m.anchors.flip(0)
26 |
27 |
28 | def check_anchors(dataset, model, thr=4.0, imgsz=640):
29 | # Check anchor fit to data, recompute if necessary
30 | m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
31 | shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
32 | scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
33 | wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
34 |
35 | def metric(k): # compute metric
36 | r = wh[:, None] / k[None]
37 | x = torch.min(r, 1 / r).min(2)[0] # ratio metric
38 | best = x.max(1)[0] # best_x
39 | aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
40 | bpr = (best > 1 / thr).float().mean() # best possible recall
41 | return bpr, aat
42 |
43 | stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
44 | anchors = m.anchors.clone() * stride # current anchors
45 | bpr, aat = metric(anchors.cpu().view(-1, 2))
46 | s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
47 | if bpr > 0.98: # threshold to recompute
48 | LOGGER.info(emojis(f'{s}Current anchors are a good fit to dataset ✅'))
49 | else:
50 | LOGGER.info(emojis(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...'))
51 | na = m.anchors.numel() // 2 # number of anchors
52 | try:
53 | anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
54 | except Exception as e:
55 | LOGGER.info(f'{PREFIX}ERROR: {e}')
56 | new_bpr = metric(anchors)[0]
57 | if new_bpr > bpr: # replace anchors
58 | anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
59 | m.anchors[:] = anchors.clone().view_as(m.anchors)
60 | check_anchor_order(m) # must be in pixel-space (not grid-space)
61 | m.anchors /= stride
62 | s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
63 | else:
64 | s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
65 | LOGGER.info(emojis(s))
66 |
67 |
68 | def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
69 | """ Creates kmeans-evolved anchors from training dataset
70 |
71 | Arguments:
72 | dataset: path to data.yaml, or a loaded dataset
73 | n: number of anchors
74 | img_size: image size used for training
75 | thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
76 | gen: generations to evolve anchors using genetic algorithm
77 | verbose: print all results
78 |
79 | Return:
80 | k: kmeans evolved anchors
81 |
82 | Usage:
83 | from utils.autoanchor import *; _ = kmean_anchors()
84 | """
85 | from scipy.cluster.vq import kmeans
86 |
87 | npr = np.random
88 | thr = 1 / thr
89 |
90 | def metric(k, wh): # compute metrics
91 | r = wh[:, None] / k[None]
92 | x = torch.min(r, 1 / r).min(2)[0] # ratio metric
93 | # x = wh_iou(wh, torch.tensor(k)) # iou metric
94 | return x, x.max(1)[0] # x, best_x
95 |
96 | def anchor_fitness(k): # mutation fitness
97 | _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
98 | return (best * (best > thr).float()).mean() # fitness
99 |
100 | def print_results(k, verbose=True):
101 | k = k[np.argsort(k.prod(1))] # sort small to large
102 | x, best = metric(k, wh0)
103 | bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
104 | s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
105 | f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
106 | f'past_thr={x[x > thr].mean():.3f}-mean: '
107 | for i, x in enumerate(k):
108 | s += '%i,%i, ' % (round(x[0]), round(x[1]))
109 | if verbose:
110 | LOGGER.info(s[:-2])
111 | return k
112 |
113 | if isinstance(dataset, str): # *.yaml file
114 | with open(dataset, errors='ignore') as f:
115 | data_dict = yaml.safe_load(f) # model dict
116 | from utils.datasets import LoadImagesAndLabels
117 | dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
118 |
119 | # Get label wh
120 | shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
121 | wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
122 |
123 | # Filter
124 | i = (wh0 < 3.0).any(1).sum()
125 | if i:
126 | LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
127 | wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
128 | # wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
129 |
130 | # Kmeans init
131 | try:
132 | LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
133 | assert n <= len(wh) # apply overdetermined constraint
134 | s = wh.std(0) # sigmas for whitening
135 | k = kmeans(wh / s, n, iter=30)[0] * s # points
136 | assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
137 | except Exception:
138 | LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
139 | k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
140 | wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
141 | k = print_results(k, verbose=False)
142 |
143 | # Plot
144 | # k, d = [None] * 20, [None] * 20
145 | # for i in tqdm(range(1, 21)):
146 | # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
147 | # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
148 | # ax = ax.ravel()
149 | # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
150 | # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
151 | # ax[0].hist(wh[wh[:, 0]<100, 0],400)
152 | # ax[1].hist(wh[wh[:, 1]<100, 1],400)
153 | # fig.savefig('wh.png', dpi=200)
154 |
155 | # Evolve
156 | f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
157 | pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
158 | for _ in pbar:
159 | v = np.ones(sh)
160 | while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
161 | v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
162 | kg = (k.copy() * v).clip(min=2.0)
163 | fg = anchor_fitness(kg)
164 | if fg > f:
165 | f, k = fg, kg.copy()
166 | pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
167 | if verbose:
168 | print_results(k, verbose)
169 |
170 | return print_results(k)
171 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/autobatch.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Auto-batch utils
4 | """
5 |
6 | from copy import deepcopy
7 |
8 | import numpy as np
9 | import torch
10 | from torch.cuda import amp
11 |
12 | from yolov5_ros.utils.general import LOGGER, colorstr
13 | from yolov5_ros.utils.torch_utils import profile
14 |
15 |
16 | def check_train_batch_size(model, imgsz=640):
17 | # Check YOLOv5 training batch size
18 | with amp.autocast():
19 | return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
20 |
21 |
22 | def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
23 | # Automatically estimate best batch size to use `fraction` of available CUDA memory
24 | # Usage:
25 | # import torch
26 | # from utils.autobatch import autobatch
27 | # model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
28 | # print(autobatch(model))
29 |
30 | prefix = colorstr('AutoBatch: ')
31 | LOGGER.info(f'{prefix}Computing optimal batch size for --imgsz {imgsz}')
32 | device = next(model.parameters()).device # get model device
33 | if device.type == 'cpu':
34 | LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
35 | return batch_size
36 |
37 | gb = 1 << 30 # bytes to GiB (1024 ** 3)
38 | d = str(device).upper() # 'CUDA:0'
39 | properties = torch.cuda.get_device_properties(device) # device properties
40 | t = properties.total_memory / gb # (GiB)
41 | r = torch.cuda.memory_reserved(device) / gb # (GiB)
42 | a = torch.cuda.memory_allocated(device) / gb # (GiB)
43 | f = t - (r + a) # free inside reserved
44 | LOGGER.info(f'{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free')
45 |
46 | batch_sizes = [1, 2, 4, 8, 16]
47 | try:
48 | img = [torch.zeros(b, 3, imgsz, imgsz) for b in batch_sizes]
49 | y = profile(img, model, n=3, device=device)
50 | except Exception as e:
51 | LOGGER.warning(f'{prefix}{e}')
52 |
53 | y = [x[2] for x in y if x] # memory [2]
54 | batch_sizes = batch_sizes[:len(y)]
55 | p = np.polyfit(batch_sizes, y, deg=1) # first degree polynomial fit
56 | b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
57 | LOGGER.info(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%)')
58 | return b
59 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/aws/__init__.py:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/utils/aws/__init__.py
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/aws/mime.sh:
--------------------------------------------------------------------------------
1 | # AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
2 | # This script will run on every instance restart, not only on first start
3 | # --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
4 |
5 | Content-Type: multipart/mixed; boundary="//"
6 | MIME-Version: 1.0
7 |
8 | --//
9 | Content-Type: text/cloud-config; charset="us-ascii"
10 | MIME-Version: 1.0
11 | Content-Transfer-Encoding: 7bit
12 | Content-Disposition: attachment; filename="cloud-config.txt"
13 |
14 | #cloud-config
15 | cloud_final_modules:
16 | - [scripts-user, always]
17 |
18 | --//
19 | Content-Type: text/x-shellscript; charset="us-ascii"
20 | MIME-Version: 1.0
21 | Content-Transfer-Encoding: 7bit
22 | Content-Disposition: attachment; filename="userdata.txt"
23 |
24 | #!/bin/bash
25 | # --- paste contents of userdata.sh here ---
26 | --//
27 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/aws/resume.py:
--------------------------------------------------------------------------------
1 | # Resume all interrupted trainings in yolov5/ dir including DDP trainings
2 | # Usage: $ python utils/aws/resume.py
3 |
4 | import os
5 | import sys
6 | from pathlib import Path
7 |
8 | import torch
9 | import yaml
10 |
11 | FILE = Path(__file__).resolve()
12 | ROOT = FILE.parents[2] # YOLOv5 root directory
13 | if str(ROOT) not in sys.path:
14 | sys.path.append(str(ROOT)) # add ROOT to PATH
15 |
16 | port = 0 # --master_port
17 | path = Path('').resolve()
18 | for last in path.rglob('*/**/last.pt'):
19 | ckpt = torch.load(last)
20 | if ckpt['optimizer'] is None:
21 | continue
22 |
23 | # Load opt.yaml
24 | with open(last.parent.parent / 'opt.yaml', errors='ignore') as f:
25 | opt = yaml.safe_load(f)
26 |
27 | # Get device count
28 | d = opt['device'].split(',') # devices
29 | nd = len(d) # number of devices
30 | ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
31 |
32 | if ddp: # multi-GPU
33 | port += 1
34 | cmd = f'python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
35 | else: # single-GPU
36 | cmd = f'python train.py --resume {last}'
37 |
38 | cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
39 | print(cmd)
40 | os.system(cmd)
41 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/aws/userdata.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | # AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
3 | # This script will run only once on first instance start (for a re-start script see mime.sh)
4 | # /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
5 | # Use >300 GB SSD
6 |
7 | cd home/ubuntu
8 | if [ ! -d yolov5 ]; then
9 | echo "Running first-time script." # install dependencies, download COCO, pull Docker
10 | git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
11 | cd yolov5
12 | bash data/scripts/get_coco.sh && echo "COCO done." &
13 | sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
14 | python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
15 | wait && echo "All tasks done." # finish background tasks
16 | else
17 | echo "Running re-start script." # resume interrupted runs
18 | i=0
19 | list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
20 | while IFS= read -r id; do
21 | ((i++))
22 | echo "restarting container $i: $id"
23 | sudo docker start $id
24 | # sudo docker exec -it $id python train.py --resume # single-GPU
25 | sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
26 | done <<<"$list"
27 | fi
28 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/benchmarks.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Run YOLOv5 benchmarks on all supported export formats
4 |
5 | Format | `export.py --include` | Model
6 | --- | --- | ---
7 | PyTorch | - | yolov5s.pt
8 | TorchScript | `torchscript` | yolov5s.torchscript
9 | ONNX | `onnx` | yolov5s.onnx
10 | OpenVINO | `openvino` | yolov5s_openvino_model/
11 | TensorRT | `engine` | yolov5s.engine
12 | CoreML | `coreml` | yolov5s.mlmodel
13 | TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
14 | TensorFlow GraphDef | `pb` | yolov5s.pb
15 | TensorFlow Lite | `tflite` | yolov5s.tflite
16 | TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
17 | TensorFlow.js | `tfjs` | yolov5s_web_model/
18 |
19 | Requirements:
20 | $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
21 | $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
22 | $ pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # TensorRT
23 |
24 | Usage:
25 | $ python utils/benchmarks.py --weights yolov5s.pt --img 640
26 | """
27 |
28 | import argparse
29 | import sys
30 | import time
31 | from pathlib import Path
32 |
33 | import pandas as pd
34 |
35 | FILE = Path(__file__).resolve()
36 | ROOT = FILE.parents[1] # YOLOv5 root directory
37 | if str(ROOT) not in sys.path:
38 | sys.path.append(str(ROOT)) # add ROOT to PATH
39 | # ROOT = ROOT.relative_to(Path.cwd()) # relative
40 |
41 | import export
42 | import val
43 | from utils import notebook_init
44 | from utils.general import LOGGER, print_args
45 | from utils.torch_utils import select_device
46 |
47 |
48 | def run(
49 | weights=ROOT / 'yolov5s.pt', # weights path
50 | imgsz=640, # inference size (pixels)
51 | batch_size=1, # batch size
52 | data=ROOT / 'data/coco128.yaml', # dataset.yaml path
53 | device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
54 | half=False, # use FP16 half-precision inference
55 | test=False, # test exports only
56 | ):
57 | y, t = [], time.time()
58 | formats = export.export_formats()
59 | device = select_device(device)
60 | for i, (name, f, suffix, gpu) in formats.iterrows(): # index, (name, file, suffix, gpu-capable)
61 | try:
62 | assert i != 9, 'Edge TPU not supported'
63 | assert i != 10, 'TF.js not supported'
64 | if device.type != 'cpu':
65 | assert gpu, f'{name} inference not supported on GPU'
66 |
67 | # Export
68 | if f == '-':
69 | w = weights # PyTorch format
70 | else:
71 | w = export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # all others
72 | assert suffix in str(w), 'export failed'
73 |
74 | # Validate
75 | result = val.run(data, w, batch_size, imgsz, plots=False, device=device, task='benchmark', half=half)
76 | metrics = result[0] # metrics (mp, mr, map50, map, *losses(box, obj, cls))
77 | speeds = result[2] # times (preprocess, inference, postprocess)
78 | y.append([name, round(metrics[3], 4), round(speeds[1], 2)]) # mAP, t_inference
79 | except Exception as e:
80 | LOGGER.warning(f'WARNING: Benchmark failure for {name}: {e}')
81 | y.append([name, None, None]) # mAP, t_inference
82 |
83 | # Print results
84 | LOGGER.info('\n')
85 | parse_opt()
86 | notebook_init() # print system info
87 | py = pd.DataFrame(y, columns=['Format', 'mAP@0.5:0.95', 'Inference time (ms)'] if map else ['Format', 'Export', ''])
88 | LOGGER.info(f'\nBenchmarks complete ({time.time() - t:.2f}s)')
89 | LOGGER.info(str(py if map else py.iloc[:, :2]))
90 | return py
91 |
92 |
93 | def test(
94 | weights=ROOT / 'yolov5s.pt', # weights path
95 | imgsz=640, # inference size (pixels)
96 | batch_size=1, # batch size
97 | data=ROOT / 'data/coco128.yaml', # dataset.yaml path
98 | device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
99 | half=False, # use FP16 half-precision inference
100 | test=False, # test exports only
101 | ):
102 | y, t = [], time.time()
103 | formats = export.export_formats()
104 | device = select_device(device)
105 | for i, (name, f, suffix, gpu) in formats.iterrows(): # index, (name, file, suffix, gpu-capable)
106 | try:
107 | w = weights if f == '-' else \
108 | export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # weights
109 | assert suffix in str(w), 'export failed'
110 | y.append([name, True])
111 | except Exception:
112 | y.append([name, False]) # mAP, t_inference
113 |
114 | # Print results
115 | LOGGER.info('\n')
116 | parse_opt()
117 | notebook_init() # print system info
118 | py = pd.DataFrame(y, columns=['Format', 'Export'])
119 | LOGGER.info(f'\nExports complete ({time.time() - t:.2f}s)')
120 | LOGGER.info(str(py))
121 | return py
122 |
123 |
124 | def parse_opt():
125 | parser = argparse.ArgumentParser()
126 | parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
127 | parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
128 | parser.add_argument('--batch-size', type=int, default=1, help='batch size')
129 | parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
130 | parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
131 | parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
132 | parser.add_argument('--test', action='store_true', help='test exports only')
133 | opt = parser.parse_args()
134 | print_args(vars(opt))
135 | return opt
136 |
137 |
138 | def main(opt):
139 | test(**vars(opt)) if opt.test else run(**vars(opt))
140 |
141 |
142 | if __name__ == "__main__":
143 | opt = parse_opt()
144 | main(opt)
145 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/callbacks.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Callback utils
4 | """
5 |
6 |
7 | class Callbacks:
8 | """"
9 | Handles all registered callbacks for YOLOv5 Hooks
10 | """
11 |
12 | def __init__(self):
13 | # Define the available callbacks
14 | self._callbacks = {
15 | 'on_pretrain_routine_start': [],
16 | 'on_pretrain_routine_end': [],
17 | 'on_train_start': [],
18 | 'on_train_epoch_start': [],
19 | 'on_train_batch_start': [],
20 | 'optimizer_step': [],
21 | 'on_before_zero_grad': [],
22 | 'on_train_batch_end': [],
23 | 'on_train_epoch_end': [],
24 | 'on_val_start': [],
25 | 'on_val_batch_start': [],
26 | 'on_val_image_end': [],
27 | 'on_val_batch_end': [],
28 | 'on_val_end': [],
29 | 'on_fit_epoch_end': [], # fit = train + val
30 | 'on_model_save': [],
31 | 'on_train_end': [],
32 | 'on_params_update': [],
33 | 'teardown': [],}
34 | self.stop_training = False # set True to interrupt training
35 |
36 | def register_action(self, hook, name='', callback=None):
37 | """
38 | Register a new action to a callback hook
39 |
40 | Args:
41 | hook: The callback hook name to register the action to
42 | name: The name of the action for later reference
43 | callback: The callback to fire
44 | """
45 | assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
46 | assert callable(callback), f"callback '{callback}' is not callable"
47 | self._callbacks[hook].append({'name': name, 'callback': callback})
48 |
49 | def get_registered_actions(self, hook=None):
50 | """"
51 | Returns all the registered actions by callback hook
52 |
53 | Args:
54 | hook: The name of the hook to check, defaults to all
55 | """
56 | return self._callbacks[hook] if hook else self._callbacks
57 |
58 | def run(self, hook, *args, **kwargs):
59 | """
60 | Loop through the registered actions and fire all callbacks
61 |
62 | Args:
63 | hook: The name of the hook to check, defaults to all
64 | args: Arguments to receive from YOLOv5
65 | kwargs: Keyword Arguments to receive from YOLOv5
66 | """
67 |
68 | assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
69 |
70 | for logger in self._callbacks[hook]:
71 | logger['callback'](*args, **kwargs)
72 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/downloads.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Download utils
4 | """
5 |
6 | import os
7 | import platform
8 | import subprocess
9 | import time
10 | import urllib
11 | from pathlib import Path
12 | from zipfile import ZipFile
13 |
14 | import requests
15 | import torch
16 |
17 |
18 | def gsutil_getsize(url=''):
19 | # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
20 | s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
21 | return eval(s.split(' ')[0]) if len(s) else 0 # bytes
22 |
23 |
24 | def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
25 | # Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
26 | file = Path(file)
27 | assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
28 | try: # url1
29 | print(f'Downloading {url} to {file}...')
30 | torch.hub.download_url_to_file(url, str(file))
31 | assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
32 | except Exception as e: # url2
33 | file.unlink(missing_ok=True) # remove partial downloads
34 | print(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
35 | os.system(f"curl -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
36 | finally:
37 | if not file.exists() or file.stat().st_size < min_bytes: # check
38 | file.unlink(missing_ok=True) # remove partial downloads
39 | print(f"ERROR: {assert_msg}\n{error_msg}")
40 | print('')
41 |
42 |
43 | def attempt_download(file, repo='ultralytics/yolov5'): # from utils.downloads import *; attempt_download()
44 | # Attempt file download if does not exist
45 | file = Path(str(file).strip().replace("'", ''))
46 |
47 | if not file.exists():
48 | # URL specified
49 | name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
50 | if str(file).startswith(('http:/', 'https:/')): # download
51 | url = str(file).replace(':/', '://') # Pathlib turns :// -> :/
52 | file = name.split('?')[0] # parse authentication https://url.com/file.txt?auth...
53 | if Path(file).is_file():
54 | print(f'Found {url} locally at {file}') # file already exists
55 | else:
56 | safe_download(file=file, url=url, min_bytes=1E5)
57 | return file
58 |
59 | # GitHub assets
60 | file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
61 | try:
62 | response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
63 | assets = [x['name'] for x in response['assets']] # release assets, i.e. ['yolov5s.pt', 'yolov5m.pt', ...]
64 | tag = response['tag_name'] # i.e. 'v1.0'
65 | except Exception: # fallback plan
66 | assets = [
67 | 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
68 | 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
69 | try:
70 | tag = subprocess.check_output('git tag', shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
71 | except Exception:
72 | tag = 'v6.0' # current release
73 |
74 | if name in assets:
75 | safe_download(
76 | file,
77 | url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
78 | # url2=f'https://storage.googleapis.com/{repo}/ckpt/{name}', # backup url (optional)
79 | min_bytes=1E5,
80 | error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/')
81 |
82 | return str(file)
83 |
84 |
85 | def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
86 | # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
87 | t = time.time()
88 | file = Path(file)
89 | cookie = Path('cookie') # gdrive cookie
90 | print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
91 | file.unlink(missing_ok=True) # remove existing file
92 | cookie.unlink(missing_ok=True) # remove existing cookie
93 |
94 | # Attempt file download
95 | out = "NUL" if platform.system() == "Windows" else "/dev/null"
96 | os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
97 | if os.path.exists('cookie'): # large file
98 | s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
99 | else: # small file
100 | s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
101 | r = os.system(s) # execute, capture return
102 | cookie.unlink(missing_ok=True) # remove existing cookie
103 |
104 | # Error check
105 | if r != 0:
106 | file.unlink(missing_ok=True) # remove partial
107 | print('Download error ') # raise Exception('Download error')
108 | return r
109 |
110 | # Unzip if archive
111 | if file.suffix == '.zip':
112 | print('unzipping... ', end='')
113 | ZipFile(file).extractall(path=file.parent) # unzip
114 | file.unlink() # remove zip
115 |
116 | print(f'Done ({time.time() - t:.1f}s)')
117 | return r
118 |
119 |
120 | def get_token(cookie="./cookie"):
121 | with open(cookie) as f:
122 | for line in f:
123 | if "download" in line:
124 | return line.split()[-1]
125 | return ""
126 |
127 |
128 | # Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
129 | #
130 | #
131 | # def upload_blob(bucket_name, source_file_name, destination_blob_name):
132 | # # Uploads a file to a bucket
133 | # # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
134 | #
135 | # storage_client = storage.Client()
136 | # bucket = storage_client.get_bucket(bucket_name)
137 | # blob = bucket.blob(destination_blob_name)
138 | #
139 | # blob.upload_from_filename(source_file_name)
140 | #
141 | # print('File {} uploaded to {}.'.format(
142 | # source_file_name,
143 | # destination_blob_name))
144 | #
145 | #
146 | # def download_blob(bucket_name, source_blob_name, destination_file_name):
147 | # # Uploads a blob from a bucket
148 | # storage_client = storage.Client()
149 | # bucket = storage_client.get_bucket(bucket_name)
150 | # blob = bucket.blob(source_blob_name)
151 | #
152 | # blob.download_to_filename(destination_file_name)
153 | #
154 | # print('Blob {} downloaded to {}.'.format(
155 | # source_blob_name,
156 | # destination_file_name))
157 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/flask_rest_api/README.md:
--------------------------------------------------------------------------------
1 | # Flask REST API
2 |
3 | [REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are
4 | commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API
5 | created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
6 |
7 | ## Requirements
8 |
9 | [Flask](https://palletsprojects.com/p/flask/) is required. Install with:
10 |
11 | ```shell
12 | $ pip install Flask
13 | ```
14 |
15 | ## Run
16 |
17 | After Flask installation run:
18 |
19 | ```shell
20 | $ python3 restapi.py --port 5000
21 | ```
22 |
23 | Then use [curl](https://curl.se/) to perform a request:
24 |
25 | ```shell
26 | $ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
27 | ```
28 |
29 | The model inference results are returned as a JSON response:
30 |
31 | ```json
32 | [
33 | {
34 | "class": 0,
35 | "confidence": 0.8900438547,
36 | "height": 0.9318675399,
37 | "name": "person",
38 | "width": 0.3264600933,
39 | "xcenter": 0.7438579798,
40 | "ycenter": 0.5207948685
41 | },
42 | {
43 | "class": 0,
44 | "confidence": 0.8440024257,
45 | "height": 0.7155083418,
46 | "name": "person",
47 | "width": 0.6546785235,
48 | "xcenter": 0.427829951,
49 | "ycenter": 0.6334488392
50 | },
51 | {
52 | "class": 27,
53 | "confidence": 0.3771208823,
54 | "height": 0.3902671337,
55 | "name": "tie",
56 | "width": 0.0696444362,
57 | "xcenter": 0.3675483763,
58 | "ycenter": 0.7991207838
59 | },
60 | {
61 | "class": 27,
62 | "confidence": 0.3527112305,
63 | "height": 0.1540903747,
64 | "name": "tie",
65 | "width": 0.0336618312,
66 | "xcenter": 0.7814827561,
67 | "ycenter": 0.5065554976
68 | }
69 | ]
70 | ```
71 |
72 | An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given
73 | in `example_request.py`
74 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/flask_rest_api/example_request.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Perform test request
4 | """
5 |
6 | import pprint
7 |
8 | import requests
9 |
10 | DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
11 | IMAGE = "zidane.jpg"
12 |
13 | # Read image
14 | with open(IMAGE, "rb") as f:
15 | image_data = f.read()
16 |
17 | response = requests.post(DETECTION_URL, files={"image": image_data}).json()
18 |
19 | pprint.pprint(response)
20 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/flask_rest_api/restapi.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Run a Flask REST API exposing a YOLOv5s model
4 | """
5 |
6 | import argparse
7 | import io
8 |
9 | import torch
10 | from flask import Flask, request
11 | from PIL import Image
12 |
13 | app = Flask(__name__)
14 |
15 | DETECTION_URL = "/v1/object-detection/yolov5s"
16 |
17 |
18 | @app.route(DETECTION_URL, methods=["POST"])
19 | def predict():
20 | if not request.method == "POST":
21 | return
22 |
23 | if request.files.get("image"):
24 | image_file = request.files["image"]
25 | image_bytes = image_file.read()
26 |
27 | img = Image.open(io.BytesIO(image_bytes))
28 |
29 | results = model(img, size=640) # reduce size=320 for faster inference
30 | return results.pandas().xyxy[0].to_json(orient="records")
31 |
32 |
33 | if __name__ == "__main__":
34 | parser = argparse.ArgumentParser(description="Flask API exposing YOLOv5 model")
35 | parser.add_argument("--port", default=5000, type=int, help="port number")
36 | opt = parser.parse_args()
37 |
38 | # Fix known issue urllib.error.HTTPError 403: rate limit exceeded https://github.com/ultralytics/yolov5/pull/7210
39 | torch.hub._validate_not_a_forked_repo = lambda a, b, c: True
40 |
41 | model = torch.hub.load("ultralytics/yolov5", "yolov5s", force_reload=True) # force_reload to recache
42 | app.run(host="0.0.0.0", port=opt.port) # debug=True causes Restarting with stat
43 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/google_app_engine/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM gcr.io/google-appengine/python
2 |
3 | # Create a virtualenv for dependencies. This isolates these packages from
4 | # system-level packages.
5 | # Use -p python3 or -p python3.7 to select python version. Default is version 2.
6 | RUN virtualenv /env -p python3
7 |
8 | # Setting these environment variables are the same as running
9 | # source /env/bin/activate.
10 | ENV VIRTUAL_ENV /env
11 | ENV PATH /env/bin:$PATH
12 |
13 | RUN apt-get update && apt-get install -y python-opencv
14 |
15 | # Copy the application's requirements.txt and run pip to install all
16 | # dependencies into the virtualenv.
17 | ADD requirements.txt /app/requirements.txt
18 | RUN pip install -r /app/requirements.txt
19 |
20 | # Add the application source code.
21 | ADD . /app
22 |
23 | # Run a WSGI server to serve the application. gunicorn must be declared as
24 | # a dependency in requirements.txt.
25 | CMD gunicorn -b :$PORT main:app
26 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/google_app_engine/additional_requirements.txt:
--------------------------------------------------------------------------------
1 | # add these requirements in your app on top of the existing ones
2 | pip==21.1
3 | Flask==2.3.2
4 | gunicorn==23.0.0
5 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/google_app_engine/app.yaml:
--------------------------------------------------------------------------------
1 | runtime: custom
2 | env: flex
3 |
4 | service: yolov5app
5 |
6 | liveness_check:
7 | initial_delay_sec: 600
8 |
9 | manual_scaling:
10 | instances: 1
11 | resources:
12 | cpu: 1
13 | memory_gb: 4
14 | disk_size_gb: 20
15 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/__init__.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Logging utils
4 | """
5 |
6 | import os
7 | import warnings
8 | from threading import Thread
9 |
10 | import pkg_resources as pkg
11 | import torch
12 | from torch.utils.tensorboard import SummaryWriter
13 |
14 | from utils.general import colorstr, cv2, emojis
15 | from utils.loggers.wandb.wandb_utils import WandbLogger
16 | from utils.plots import plot_images, plot_results
17 | from utils.torch_utils import de_parallel
18 |
19 | LOGGERS = ('csv', 'tb', 'wandb') # text-file, TensorBoard, Weights & Biases
20 | RANK = int(os.getenv('RANK', -1))
21 |
22 | try:
23 | import wandb
24 |
25 | assert hasattr(wandb, '__version__') # verify package import not local dir
26 | if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.2') and RANK in [0, -1]:
27 | try:
28 | wandb_login_success = wandb.login(timeout=30)
29 | except wandb.errors.UsageError: # known non-TTY terminal issue
30 | wandb_login_success = False
31 | if not wandb_login_success:
32 | wandb = None
33 | except (ImportError, AssertionError):
34 | wandb = None
35 |
36 |
37 | class Loggers():
38 | # YOLOv5 Loggers class
39 | def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
40 | self.save_dir = save_dir
41 | self.weights = weights
42 | self.opt = opt
43 | self.hyp = hyp
44 | self.logger = logger # for printing results to console
45 | self.include = include
46 | self.keys = [
47 | 'train/box_loss',
48 | 'train/obj_loss',
49 | 'train/cls_loss', # train loss
50 | 'metrics/precision',
51 | 'metrics/recall',
52 | 'metrics/mAP_0.5',
53 | 'metrics/mAP_0.5:0.95', # metrics
54 | 'val/box_loss',
55 | 'val/obj_loss',
56 | 'val/cls_loss', # val loss
57 | 'x/lr0',
58 | 'x/lr1',
59 | 'x/lr2'] # params
60 | self.best_keys = ['best/epoch', 'best/precision', 'best/recall', 'best/mAP_0.5', 'best/mAP_0.5:0.95']
61 | for k in LOGGERS:
62 | setattr(self, k, None) # init empty logger dictionary
63 | self.csv = True # always log to csv
64 |
65 | # Message
66 | if not wandb:
67 | prefix = colorstr('Weights & Biases: ')
68 | s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs (RECOMMENDED)"
69 | self.logger.info(emojis(s))
70 |
71 | # TensorBoard
72 | s = self.save_dir
73 | if 'tb' in self.include and not self.opt.evolve:
74 | prefix = colorstr('TensorBoard: ')
75 | self.logger.info(f"{prefix}Start with 'tensorboard --logdir {s.parent}', view at http://localhost:6006/")
76 | self.tb = SummaryWriter(str(s))
77 |
78 | # W&B
79 | if wandb and 'wandb' in self.include:
80 | wandb_artifact_resume = isinstance(self.opt.resume, str) and self.opt.resume.startswith('wandb-artifact://')
81 | run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
82 | self.opt.hyp = self.hyp # add hyperparameters
83 | self.wandb = WandbLogger(self.opt, run_id)
84 | # temp warn. because nested artifacts not supported after 0.12.10
85 | if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
86 | self.logger.warning(
87 | "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
88 | )
89 | else:
90 | self.wandb = None
91 |
92 | def on_train_start(self):
93 | # Callback runs on train start
94 | pass
95 |
96 | def on_pretrain_routine_end(self):
97 | # Callback runs on pre-train routine end
98 | paths = self.save_dir.glob('*labels*.jpg') # training labels
99 | if self.wandb:
100 | self.wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in paths]})
101 |
102 | def on_train_batch_end(self, ni, model, imgs, targets, paths, plots, sync_bn):
103 | # Callback runs on train batch end
104 | if plots:
105 | if ni == 0:
106 | if not sync_bn: # tb.add_graph() --sync known issue https://github.com/ultralytics/yolov5/issues/3754
107 | with warnings.catch_warnings():
108 | warnings.simplefilter('ignore') # suppress jit trace warning
109 | self.tb.add_graph(torch.jit.trace(de_parallel(model), imgs[0:1], strict=False), [])
110 | if ni < 3:
111 | f = self.save_dir / f'train_batch{ni}.jpg' # filename
112 | Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
113 | if self.wandb and ni == 10:
114 | files = sorted(self.save_dir.glob('train*.jpg'))
115 | self.wandb.log({'Mosaics': [wandb.Image(str(f), caption=f.name) for f in files if f.exists()]})
116 |
117 | def on_train_epoch_end(self, epoch):
118 | # Callback runs on train epoch end
119 | if self.wandb:
120 | self.wandb.current_epoch = epoch + 1
121 |
122 | def on_val_image_end(self, pred, predn, path, names, im):
123 | # Callback runs on val image end
124 | if self.wandb:
125 | self.wandb.val_one_image(pred, predn, path, names, im)
126 |
127 | def on_val_end(self):
128 | # Callback runs on val end
129 | if self.wandb:
130 | files = sorted(self.save_dir.glob('val*.jpg'))
131 | self.wandb.log({"Validation": [wandb.Image(str(f), caption=f.name) for f in files]})
132 |
133 | def on_fit_epoch_end(self, vals, epoch, best_fitness, fi):
134 | # Callback runs at the end of each fit (train+val) epoch
135 | x = {k: v for k, v in zip(self.keys, vals)} # dict
136 | if self.csv:
137 | file = self.save_dir / 'results.csv'
138 | n = len(x) + 1 # number of cols
139 | s = '' if file.exists() else (('%20s,' * n % tuple(['epoch'] + self.keys)).rstrip(',') + '\n') # add header
140 | with open(file, 'a') as f:
141 | f.write(s + ('%20.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
142 |
143 | if self.tb:
144 | for k, v in x.items():
145 | self.tb.add_scalar(k, v, epoch)
146 |
147 | if self.wandb:
148 | if best_fitness == fi:
149 | best_results = [epoch] + vals[3:7]
150 | for i, name in enumerate(self.best_keys):
151 | self.wandb.wandb_run.summary[name] = best_results[i] # log best results in the summary
152 | self.wandb.log(x)
153 | self.wandb.end_epoch(best_result=best_fitness == fi)
154 |
155 | def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
156 | # Callback runs on model save event
157 | if self.wandb:
158 | if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
159 | self.wandb.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
160 |
161 | def on_train_end(self, last, best, plots, epoch, results):
162 | # Callback runs on training end
163 | if plots:
164 | plot_results(file=self.save_dir / 'results.csv') # save results.png
165 | files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
166 | files = [(self.save_dir / f) for f in files if (self.save_dir / f).exists()] # filter
167 |
168 | if self.tb:
169 | for f in files:
170 | self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
171 |
172 | if self.wandb:
173 | self.wandb.log({k: v for k, v in zip(self.keys[3:10], results)}) # log best.pt val results
174 | self.wandb.log({"Results": [wandb.Image(str(f), caption=f.name) for f in files]})
175 | # Calling wandb.log. TODO: Refactor this into WandbLogger.log_model
176 | if not self.opt.evolve:
177 | wandb.log_artifact(str(best if best.exists() else last),
178 | type='model',
179 | name='run_' + self.wandb.wandb_run.id + '_model',
180 | aliases=['latest', 'best', 'stripped'])
181 | self.wandb.finish_run()
182 |
183 | def on_params_update(self, params):
184 | # Update hyperparams or configs of the experiment
185 | # params: A dict containing {param: value} pairs
186 | if self.wandb:
187 | self.wandb.wandb_run.config.update(params, allow_val_change=True)
188 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/README.md:
--------------------------------------------------------------------------------
1 | 📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
2 | * [About Weights & Biases](#about-weights-&-biases)
3 | * [First-Time Setup](#first-time-setup)
4 | * [Viewing runs](#viewing-runs)
5 | * [Disabling wandb](#disabling-wandb)
6 | * [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
7 | * [Reports: Share your work with the world!](#reports)
8 |
9 | ## About Weights & Biases
10 | Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
11 |
12 | Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
13 |
14 | * [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
15 | * [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
16 | * [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
17 | * [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
18 | * [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
19 | * [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
20 |
21 | ## First-Time Setup
22 |
23 | Toggle Details
24 | When you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.
25 |
26 | W&B will create a cloud **project** (default is 'YOLOv5') for your training runs, and each new training run will be provided a unique run **name** within that project as project/name. You can also manually set your project and run name as:
27 |
28 | ```shell
29 | $ python train.py --project ... --name ...
30 | ```
31 |
32 | YOLOv5 notebook example: 
 33 |
33 |  34 |
35 |
36 |
34 |
35 |
36 |
37 |
38 | ## Viewing Runs
39 |
40 | Toggle Details
41 | Run information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:
42 |
43 | * Training & Validation losses
44 | * Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95
45 | * Learning Rate over time
46 | * A bounding box debugging panel, showing the training progress over time
47 | * GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**
48 | * System: Disk I/0, CPU utilization, RAM memory usage
49 | * Your trained model as W&B Artifact
50 | * Environment: OS and Python types, Git repository and state, **training command**
51 |
52 | 
53 |
54 |
55 | ## Disabling wandb
56 | * training after running `wandb disabled` inside that directory creates no wandb run
57 | 
58 |
59 | * To enable wandb again, run `wandb online`
60 | 
61 |
62 | ## Advanced Usage
63 | You can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training evaluations. Here are some quick examples to get you started.
64 |
65 | 1: Train and Log Evaluation simultaneousy
66 | This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table
67 | Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,
68 | so no images will be uploaded from your system more than once.
69 |
70 | Usage
71 | Code $ python train.py --upload_data val
72 |
73 | 
74 |
75 |
76 | 2. Visualize and Version Datasets
77 | Log, visualize, dynamically query, and understand your data with W&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a {dataset}_wandb.yaml file which can be used to train from dataset artifact.
78 |
79 | Usage
80 | Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
81 |
82 | 
83 |
84 |
85 | 3: Train using dataset artifact
86 | When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that
87 | can be used to train a model directly from the dataset artifact. This also logs evaluation
88 |
89 | Usage
90 | Code $ python train.py --data {data}_wandb.yaml
91 |
92 | 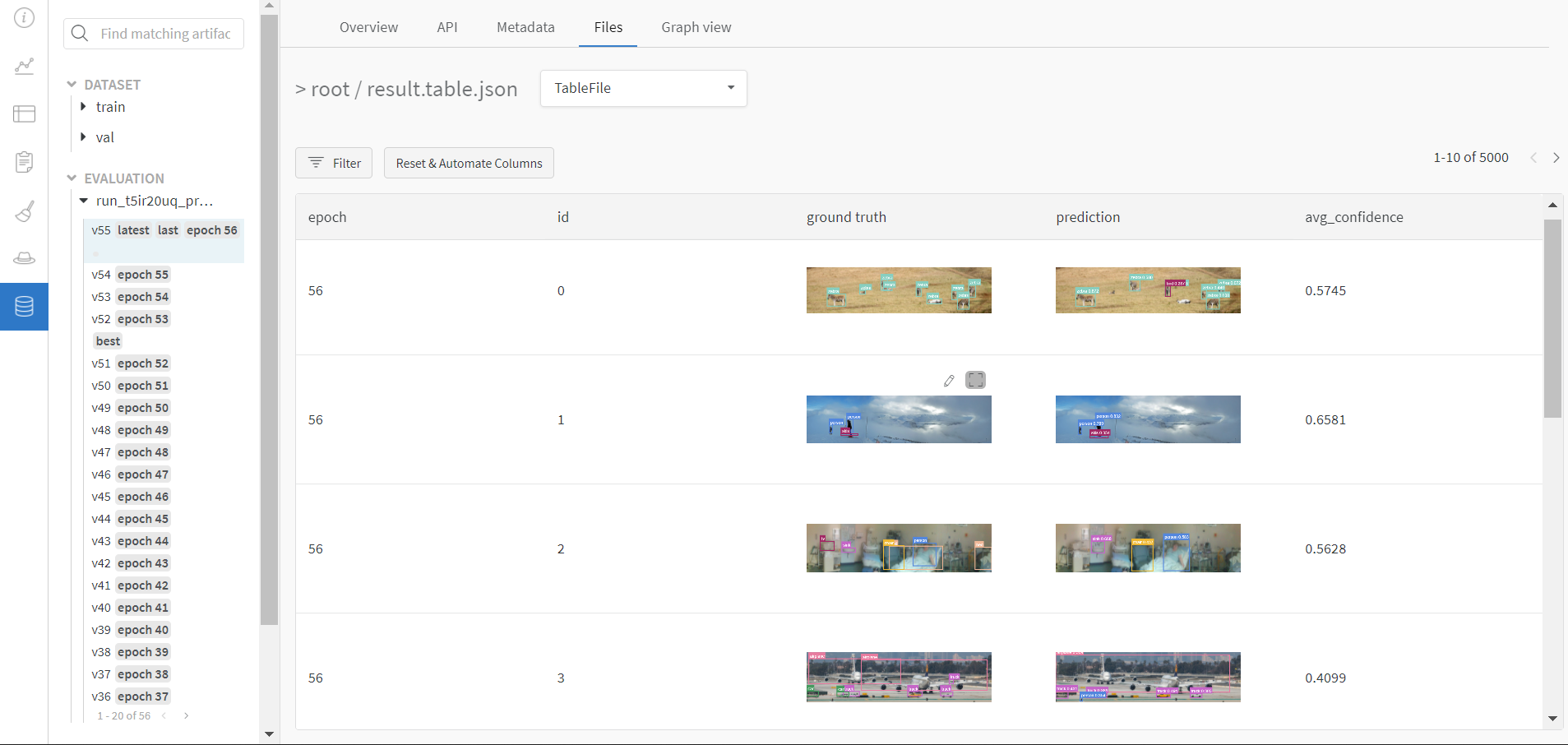
93 |
94 |
95 | 4: Save model checkpoints as artifacts
96 | To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.
97 | You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged
98 |
99 |
100 | Usage
101 | Code $ python train.py --save_period 1
102 |
103 | 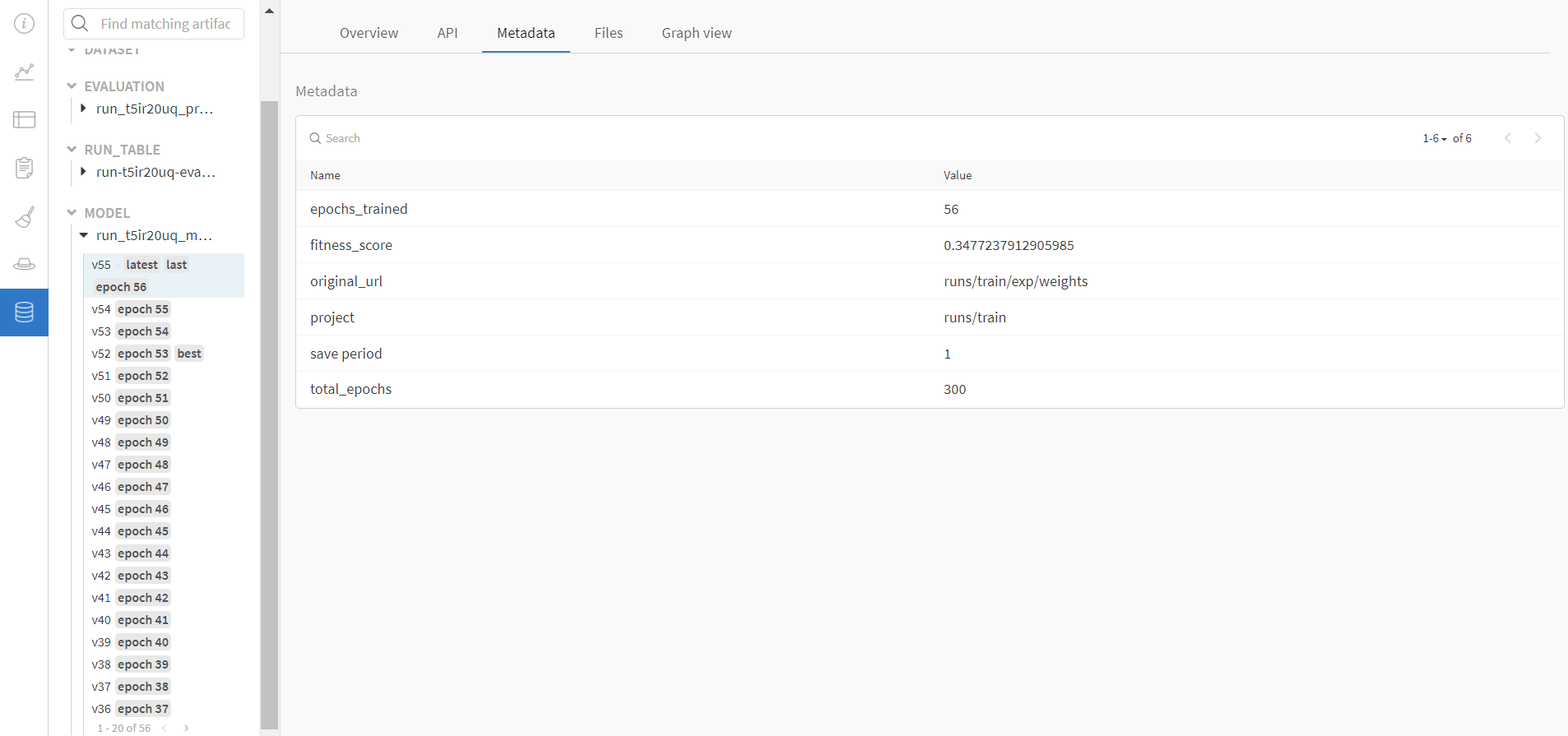
104 |
105 |
106 |
107 |
108 | 5: Resume runs from checkpoint artifacts.
109 | Any run can be resumed using artifacts if the --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
110 |
111 |
112 | Usage
113 | Code $ python train.py --resume wandb-artifact://{run_path}
114 |
115 | 
116 |
117 |
118 | 6: Resume runs from dataset artifact & checkpoint artifacts.
119 | Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device
120 | The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot --upload_dataset or
121 | train from _wandb.yaml file and set --save_period
122 |
123 |
124 | Usage
125 | Code $ python train.py --resume wandb-artifact://{run_path}
126 |
127 | 
128 |
129 |
130 |
131 |
132 | Reports
133 | W&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all four YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).
134 |
135 |  136 |
137 |
138 | ## Environments
139 |
140 | YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
141 |
142 | - **Google Colab and Kaggle** notebooks with free GPU:
143 | - **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
144 | - **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
145 | - **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
136 |
137 |
138 | ## Environments
139 |
140 | YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
141 |
142 | - **Google Colab and Kaggle** notebooks with free GPU:
143 | - **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
144 | - **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
145 | - **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  146 |
147 |
148 | ## Status
149 |
150 | 
151 |
152 | If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
153 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/__init__.py:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/utils/loggers/wandb/__init__.py
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/log_dataset.py:
--------------------------------------------------------------------------------
1 | import argparse
2 |
3 | from wandb_utils import WandbLogger
4 |
5 | from utils.general import LOGGER
6 |
7 | WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
8 |
9 |
10 | def create_dataset_artifact(opt):
11 | logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
12 | if not logger.wandb:
13 | LOGGER.info("install wandb using `pip install wandb` to log the dataset")
14 |
15 |
16 | if __name__ == '__main__':
17 | parser = argparse.ArgumentParser()
18 | parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
19 | parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
20 | parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
21 | parser.add_argument('--entity', default=None, help='W&B entity')
22 | parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
23 |
24 | opt = parser.parse_args()
25 | opt.resume = False # Explicitly disallow resume check for dataset upload job
26 |
27 | create_dataset_artifact(opt)
28 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/sweep.py:
--------------------------------------------------------------------------------
1 | import sys
2 | from pathlib import Path
3 |
4 | import wandb
5 |
6 | FILE = Path(__file__).resolve()
7 | ROOT = FILE.parents[3] # YOLOv5 root directory
8 | if str(ROOT) not in sys.path:
9 | sys.path.append(str(ROOT)) # add ROOT to PATH
10 |
11 | from train import parse_opt, train
12 | from utils.callbacks import Callbacks
13 | from utils.general import increment_path
14 | from utils.torch_utils import select_device
15 |
16 |
17 | def sweep():
18 | wandb.init()
19 | # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
20 | hyp_dict = vars(wandb.config).get("_items").copy()
21 |
22 | # Workaround: get necessary opt args
23 | opt = parse_opt(known=True)
24 | opt.batch_size = hyp_dict.get("batch_size")
25 | opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
26 | opt.epochs = hyp_dict.get("epochs")
27 | opt.nosave = True
28 | opt.data = hyp_dict.get("data")
29 | opt.weights = str(opt.weights)
30 | opt.cfg = str(opt.cfg)
31 | opt.data = str(opt.data)
32 | opt.hyp = str(opt.hyp)
33 | opt.project = str(opt.project)
34 | device = select_device(opt.device, batch_size=opt.batch_size)
35 |
36 | # train
37 | train(hyp_dict, opt, device, callbacks=Callbacks())
38 |
39 |
40 | if __name__ == "__main__":
41 | sweep()
42 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/sweep.yaml:
--------------------------------------------------------------------------------
1 | # Hyperparameters for training
2 | # To set range-
3 | # Provide min and max values as:
4 | # parameter:
5 | #
6 | # min: scalar
7 | # max: scalar
8 | # OR
9 | #
10 | # Set a specific list of search space-
11 | # parameter:
12 | # values: [scalar1, scalar2, scalar3...]
13 | #
14 | # You can use grid, bayesian and hyperopt search strategy
15 | # For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
16 |
17 | program: utils/loggers/wandb/sweep.py
18 | method: random
19 | metric:
20 | name: metrics/mAP_0.5
21 | goal: maximize
22 |
23 | parameters:
24 | # hyperparameters: set either min, max range or values list
25 | data:
26 | value: "data/coco128.yaml"
27 | batch_size:
28 | values: [64]
29 | epochs:
30 | values: [10]
31 |
32 | lr0:
33 | distribution: uniform
34 | min: 1e-5
35 | max: 1e-1
36 | lrf:
37 | distribution: uniform
38 | min: 0.01
39 | max: 1.0
40 | momentum:
41 | distribution: uniform
42 | min: 0.6
43 | max: 0.98
44 | weight_decay:
45 | distribution: uniform
46 | min: 0.0
47 | max: 0.001
48 | warmup_epochs:
49 | distribution: uniform
50 | min: 0.0
51 | max: 5.0
52 | warmup_momentum:
53 | distribution: uniform
54 | min: 0.0
55 | max: 0.95
56 | warmup_bias_lr:
57 | distribution: uniform
58 | min: 0.0
59 | max: 0.2
60 | box:
61 | distribution: uniform
62 | min: 0.02
63 | max: 0.2
64 | cls:
65 | distribution: uniform
66 | min: 0.2
67 | max: 4.0
68 | cls_pw:
69 | distribution: uniform
70 | min: 0.5
71 | max: 2.0
72 | obj:
73 | distribution: uniform
74 | min: 0.2
75 | max: 4.0
76 | obj_pw:
77 | distribution: uniform
78 | min: 0.5
79 | max: 2.0
80 | iou_t:
81 | distribution: uniform
82 | min: 0.1
83 | max: 0.7
84 | anchor_t:
85 | distribution: uniform
86 | min: 2.0
87 | max: 8.0
88 | fl_gamma:
89 | distribution: uniform
90 | min: 0.0
91 | max: 4.0
92 | hsv_h:
93 | distribution: uniform
94 | min: 0.0
95 | max: 0.1
96 | hsv_s:
97 | distribution: uniform
98 | min: 0.0
99 | max: 0.9
100 | hsv_v:
101 | distribution: uniform
102 | min: 0.0
103 | max: 0.9
104 | degrees:
105 | distribution: uniform
106 | min: 0.0
107 | max: 45.0
108 | translate:
109 | distribution: uniform
110 | min: 0.0
111 | max: 0.9
112 | scale:
113 | distribution: uniform
114 | min: 0.0
115 | max: 0.9
116 | shear:
117 | distribution: uniform
118 | min: 0.0
119 | max: 10.0
120 | perspective:
121 | distribution: uniform
122 | min: 0.0
123 | max: 0.001
124 | flipud:
125 | distribution: uniform
126 | min: 0.0
127 | max: 1.0
128 | fliplr:
129 | distribution: uniform
130 | min: 0.0
131 | max: 1.0
132 | mosaic:
133 | distribution: uniform
134 | min: 0.0
135 | max: 1.0
136 | mixup:
137 | distribution: uniform
138 | min: 0.0
139 | max: 1.0
140 | copy_paste:
141 | distribution: uniform
142 | min: 0.0
143 | max: 1.0
144 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loss.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Loss functions
4 | """
5 |
6 | import torch
7 | import torch.nn as nn
8 |
9 | from yolov5_ros.utils.metrics import bbox_iou
10 | from yolov5_ros.utils.torch_utils import de_parallel
11 |
12 |
13 | def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
14 | # return positive, negative label smoothing BCE targets
15 | return 1.0 - 0.5 * eps, 0.5 * eps
16 |
17 |
18 | class BCEBlurWithLogitsLoss(nn.Module):
19 | # BCEwithLogitLoss() with reduced missing label effects.
20 | def __init__(self, alpha=0.05):
21 | super().__init__()
22 | self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
23 | self.alpha = alpha
24 |
25 | def forward(self, pred, true):
26 | loss = self.loss_fcn(pred, true)
27 | pred = torch.sigmoid(pred) # prob from logits
28 | dx = pred - true # reduce only missing label effects
29 | # dx = (pred - true).abs() # reduce missing label and false label effects
30 | alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
31 | loss *= alpha_factor
32 | return loss.mean()
33 |
34 |
35 | class FocalLoss(nn.Module):
36 | # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
37 | def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
38 | super().__init__()
39 | self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
40 | self.gamma = gamma
41 | self.alpha = alpha
42 | self.reduction = loss_fcn.reduction
43 | self.loss_fcn.reduction = 'none' # required to apply FL to each element
44 |
45 | def forward(self, pred, true):
46 | loss = self.loss_fcn(pred, true)
47 | # p_t = torch.exp(-loss)
48 | # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
49 |
50 | # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
51 | pred_prob = torch.sigmoid(pred) # prob from logits
52 | p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
53 | alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
54 | modulating_factor = (1.0 - p_t) ** self.gamma
55 | loss *= alpha_factor * modulating_factor
56 |
57 | if self.reduction == 'mean':
58 | return loss.mean()
59 | elif self.reduction == 'sum':
60 | return loss.sum()
61 | else: # 'none'
62 | return loss
63 |
64 |
65 | class QFocalLoss(nn.Module):
66 | # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
67 | def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
68 | super().__init__()
69 | self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
70 | self.gamma = gamma
71 | self.alpha = alpha
72 | self.reduction = loss_fcn.reduction
73 | self.loss_fcn.reduction = 'none' # required to apply FL to each element
74 |
75 | def forward(self, pred, true):
76 | loss = self.loss_fcn(pred, true)
77 |
78 | pred_prob = torch.sigmoid(pred) # prob from logits
79 | alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
80 | modulating_factor = torch.abs(true - pred_prob) ** self.gamma
81 | loss *= alpha_factor * modulating_factor
82 |
83 | if self.reduction == 'mean':
84 | return loss.mean()
85 | elif self.reduction == 'sum':
86 | return loss.sum()
87 | else: # 'none'
88 | return loss
89 |
90 |
91 | class ComputeLoss:
92 | sort_obj_iou = False
93 |
94 | # Compute losses
95 | def __init__(self, model, autobalance=False):
96 | device = next(model.parameters()).device # get model device
97 | h = model.hyp # hyperparameters
98 |
99 | # Define criteria
100 | BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
101 | BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
102 |
103 | # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
104 | self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
105 |
106 | # Focal loss
107 | g = h['fl_gamma'] # focal loss gamma
108 | if g > 0:
109 | BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
110 |
111 | m = de_parallel(model).model[-1] # Detect() module
112 | self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
113 | self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
114 | self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
115 | self.na = m.na # number of anchors
116 | self.nc = m.nc # number of classes
117 | self.nl = m.nl # number of layers
118 | self.anchors = m.anchors
119 | self.device = device
120 |
121 | def __call__(self, p, targets): # predictions, targets
122 | lcls = torch.zeros(1, device=self.device) # class loss
123 | lbox = torch.zeros(1, device=self.device) # box loss
124 | lobj = torch.zeros(1, device=self.device) # object loss
125 | tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
126 |
127 | # Losses
128 | for i, pi in enumerate(p): # layer index, layer predictions
129 | b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
130 | tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
131 |
132 | n = b.shape[0] # number of targets
133 | if n:
134 | # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
135 | pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
136 |
137 | # Regression
138 | pxy = pxy.sigmoid() * 2 - 0.5
139 | pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
140 | pbox = torch.cat((pxy, pwh), 1) # predicted box
141 | iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
142 | lbox += (1.0 - iou).mean() # iou loss
143 |
144 | # Objectness
145 | iou = iou.detach().clamp(0).type(tobj.dtype)
146 | if self.sort_obj_iou:
147 | j = iou.argsort()
148 | b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
149 | if self.gr < 1:
150 | iou = (1.0 - self.gr) + self.gr * iou
151 | tobj[b, a, gj, gi] = iou # iou ratio
152 |
153 | # Classification
154 | if self.nc > 1: # cls loss (only if multiple classes)
155 | t = torch.full_like(pcls, self.cn, device=self.device) # targets
156 | t[range(n), tcls[i]] = self.cp
157 | lcls += self.BCEcls(pcls, t) # BCE
158 |
159 | # Append targets to text file
160 | # with open('targets.txt', 'a') as file:
161 | # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
162 |
163 | obji = self.BCEobj(pi[..., 4], tobj)
164 | lobj += obji * self.balance[i] # obj loss
165 | if self.autobalance:
166 | self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
167 |
168 | if self.autobalance:
169 | self.balance = [x / self.balance[self.ssi] for x in self.balance]
170 | lbox *= self.hyp['box']
171 | lobj *= self.hyp['obj']
172 | lcls *= self.hyp['cls']
173 | bs = tobj.shape[0] # batch size
174 |
175 | return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
176 |
177 | def build_targets(self, p, targets):
178 | # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
179 | na, nt = self.na, targets.shape[0] # number of anchors, targets
180 | tcls, tbox, indices, anch = [], [], [], []
181 | gain = torch.ones(7, device=self.device) # normalized to gridspace gain
182 | ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
183 | targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
184 |
185 | g = 0.5 # bias
186 | off = torch.tensor(
187 | [
188 | [0, 0],
189 | [1, 0],
190 | [0, 1],
191 | [-1, 0],
192 | [0, -1], # j,k,l,m
193 | # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
194 | ],
195 | device=self.device).float() * g # offsets
196 |
197 | for i in range(self.nl):
198 | anchors = self.anchors[i]
199 | gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
200 |
201 | # Match targets to anchors
202 | t = targets * gain # shape(3,n,7)
203 | if nt:
204 | # Matches
205 | r = t[..., 4:6] / anchors[:, None] # wh ratio
206 | j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
207 | # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
208 | t = t[j] # filter
209 |
210 | # Offsets
211 | gxy = t[:, 2:4] # grid xy
212 | gxi = gain[[2, 3]] - gxy # inverse
213 | j, k = ((gxy % 1 < g) & (gxy > 1)).T
214 | l, m = ((gxi % 1 < g) & (gxi > 1)).T
215 | j = torch.stack((torch.ones_like(j), j, k, l, m))
216 | t = t.repeat((5, 1, 1))[j]
217 | offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
218 | else:
219 | t = targets[0]
220 | offsets = 0
221 |
222 | # Define
223 | bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
224 | a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
225 | gij = (gxy - offsets).long()
226 | gi, gj = gij.T # grid indices
227 |
228 | # Append
229 | indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
230 | tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
231 | anch.append(anchors[a]) # anchors
232 | tcls.append(c) # class
233 |
234 | return tcls, tbox, indices, anch
235 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/torch_utils.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | PyTorch utils
4 | """
5 |
6 | import math
7 | import os
8 | import platform
9 | import subprocess
10 | import time
11 | import warnings
12 | from contextlib import contextmanager
13 | from copy import deepcopy
14 | from pathlib import Path
15 |
16 | import torch
17 | import torch.distributed as dist
18 | import torch.nn as nn
19 | import torch.nn.functional as F
20 |
21 | from yolov5_ros.utils.general import LOGGER, file_update_date, git_describe
22 |
23 | try:
24 | import thop # for FLOPs computation
25 | except ImportError:
26 | thop = None
27 |
28 | # Suppress PyTorch warnings
29 | warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
30 |
31 |
32 | @contextmanager
33 | def torch_distributed_zero_first(local_rank: int):
34 | # Decorator to make all processes in distributed training wait for each local_master to do something
35 | if local_rank not in [-1, 0]:
36 | dist.barrier(device_ids=[local_rank])
37 | yield
38 | if local_rank == 0:
39 | dist.barrier(device_ids=[0])
40 |
41 |
42 | def device_count():
43 | # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Only works on Linux.
44 | assert platform.system() == 'Linux', 'device_count() function only works on Linux'
45 | try:
46 | cmd = 'nvidia-smi -L | wc -l'
47 | return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
48 | except Exception:
49 | return 0
50 |
51 |
52 | def select_device(device='', batch_size=0, newline=True):
53 | # device = 'cpu' or '0' or '0,1,2,3'
54 | s = f'YOLOv5 🚀 {git_describe() or file_update_date()} torch {torch.__version__} ' # string
55 | device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
56 | cpu = device == 'cpu'
57 | if cpu:
58 | os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
59 | elif device: # non-cpu device requested
60 | os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
61 | assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
62 | f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
63 |
64 | cuda = not cpu and torch.cuda.is_available()
65 | if cuda:
66 | devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
67 | n = len(devices) # device count
68 | if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
69 | assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
70 | space = ' ' * (len(s) + 1)
71 | for i, d in enumerate(devices):
72 | p = torch.cuda.get_device_properties(i)
73 | s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
74 | else:
75 | s += 'CPU\n'
76 |
77 | if not newline:
78 | s = s.rstrip()
79 | LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
80 | return torch.device('cuda:0' if cuda else 'cpu')
81 |
82 |
83 | def time_sync():
84 | # PyTorch-accurate time
85 | if torch.cuda.is_available():
86 | torch.cuda.synchronize()
87 | return time.time()
88 |
89 |
90 | def profile(input, ops, n=10, device=None):
91 | # YOLOv5 speed/memory/FLOPs profiler
92 | #
93 | # Usage:
94 | # input = torch.randn(16, 3, 640, 640)
95 | # m1 = lambda x: x * torch.sigmoid(x)
96 | # m2 = nn.SiLU()
97 | # profile(input, [m1, m2], n=100) # profile over 100 iterations
98 |
99 | results = []
100 | device = device or select_device()
101 | print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
102 | f"{'input':>24s}{'output':>24s}")
103 |
104 | for x in input if isinstance(input, list) else [input]:
105 | x = x.to(device)
106 | x.requires_grad = True
107 | for m in ops if isinstance(ops, list) else [ops]:
108 | m = m.to(device) if hasattr(m, 'to') else m # device
109 | m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
110 | tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
111 | try:
112 | flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
113 | except Exception:
114 | flops = 0
115 |
116 | try:
117 | for _ in range(n):
118 | t[0] = time_sync()
119 | y = m(x)
120 | t[1] = time_sync()
121 | try:
122 | _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
123 | t[2] = time_sync()
124 | except Exception: # no backward method
125 | # print(e) # for debug
126 | t[2] = float('nan')
127 | tf += (t[1] - t[0]) * 1000 / n # ms per op forward
128 | tb += (t[2] - t[1]) * 1000 / n # ms per op backward
129 | mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
130 | s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
131 | s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
132 | p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
133 | print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
134 | results.append([p, flops, mem, tf, tb, s_in, s_out])
135 | except Exception as e:
136 | print(e)
137 | results.append(None)
138 | torch.cuda.empty_cache()
139 | return results
140 |
141 |
142 | def is_parallel(model):
143 | # Returns True if model is of type DP or DDP
144 | return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
145 |
146 |
147 | def de_parallel(model):
148 | # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
149 | return model.module if is_parallel(model) else model
150 |
151 |
152 | def initialize_weights(model):
153 | for m in model.modules():
154 | t = type(m)
155 | if t is nn.Conv2d:
156 | pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
157 | elif t is nn.BatchNorm2d:
158 | m.eps = 1e-3
159 | m.momentum = 0.03
160 | elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
161 | m.inplace = True
162 |
163 |
164 | def find_modules(model, mclass=nn.Conv2d):
165 | # Finds layer indices matching module class 'mclass'
166 | return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
167 |
168 |
169 | def sparsity(model):
170 | # Return global model sparsity
171 | a, b = 0, 0
172 | for p in model.parameters():
173 | a += p.numel()
174 | b += (p == 0).sum()
175 | return b / a
176 |
177 |
178 | def prune(model, amount=0.3):
179 | # Prune model to requested global sparsity
180 | import torch.nn.utils.prune as prune
181 | print('Pruning model... ', end='')
182 | for name, m in model.named_modules():
183 | if isinstance(m, nn.Conv2d):
184 | prune.l1_unstructured(m, name='weight', amount=amount) # prune
185 | prune.remove(m, 'weight') # make permanent
186 | print(' %.3g global sparsity' % sparsity(model))
187 |
188 |
189 | def fuse_conv_and_bn(conv, bn):
190 | # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
191 | fusedconv = nn.Conv2d(conv.in_channels,
192 | conv.out_channels,
193 | kernel_size=conv.kernel_size,
194 | stride=conv.stride,
195 | padding=conv.padding,
196 | groups=conv.groups,
197 | bias=True).requires_grad_(False).to(conv.weight.device)
198 |
199 | # Prepare filters
200 | w_conv = conv.weight.clone().view(conv.out_channels, -1)
201 | w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
202 | fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
203 |
204 | # Prepare spatial bias
205 | b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
206 | b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
207 | fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
208 |
209 | return fusedconv
210 |
211 |
212 | def model_info(model, verbose=False, img_size=640):
213 | # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
214 | n_p = sum(x.numel() for x in model.parameters()) # number parameters
215 | n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
216 | if verbose:
217 | print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
218 | for i, (name, p) in enumerate(model.named_parameters()):
219 | name = name.replace('module_list.', '')
220 | print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
221 | (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
222 |
223 | try: # FLOPs
224 | from thop import profile
225 | stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
226 | img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
227 | flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
228 | img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
229 | fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
230 | except (ImportError, Exception):
231 | fs = ''
232 |
233 | name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
234 | LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
235 |
236 |
237 | def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
238 | # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
239 | if ratio == 1.0:
240 | return img
241 | else:
242 | h, w = img.shape[2:]
243 | s = (int(h * ratio), int(w * ratio)) # new size
244 | img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
245 | if not same_shape: # pad/crop img
246 | h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
247 | return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
248 |
249 |
250 | def copy_attr(a, b, include=(), exclude=()):
251 | # Copy attributes from b to a, options to only include [...] and to exclude [...]
252 | for k, v in b.__dict__.items():
253 | if (len(include) and k not in include) or k.startswith('_') or k in exclude:
254 | continue
255 | else:
256 | setattr(a, k, v)
257 |
258 |
259 | class EarlyStopping:
260 | # YOLOv5 simple early stopper
261 | def __init__(self, patience=30):
262 | self.best_fitness = 0.0 # i.e. mAP
263 | self.best_epoch = 0
264 | self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
265 | self.possible_stop = False # possible stop may occur next epoch
266 |
267 | def __call__(self, epoch, fitness):
268 | if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
269 | self.best_epoch = epoch
270 | self.best_fitness = fitness
271 | delta = epoch - self.best_epoch # epochs without improvement
272 | self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
273 | stop = delta >= self.patience # stop training if patience exceeded
274 | if stop:
275 | LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
276 | f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
277 | f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
278 | f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
279 | return stop
280 |
281 |
282 | class ModelEMA:
283 | """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
284 | Keeps a moving average of everything in the model state_dict (parameters and buffers)
285 | For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
286 | """
287 |
288 | def __init__(self, model, decay=0.9999, tau=2000, updates=0):
289 | # Create EMA
290 | self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
291 | # if next(model.parameters()).device.type != 'cpu':
292 | # self.ema.half() # FP16 EMA
293 | self.updates = updates # number of EMA updates
294 | self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
295 | for p in self.ema.parameters():
296 | p.requires_grad_(False)
297 |
298 | def update(self, model):
299 | # Update EMA parameters
300 | with torch.no_grad():
301 | self.updates += 1
302 | d = self.decay(self.updates)
303 |
304 | msd = de_parallel(model).state_dict() # model state_dict
305 | for k, v in self.ema.state_dict().items():
306 | if v.dtype.is_floating_point:
307 | v *= d
308 | v += (1 - d) * msd[k].detach()
309 |
310 | def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
311 | # Update EMA attributes
312 | copy_attr(self.ema, model, include, exclude)
313 |
--------------------------------------------------------------------------------
146 |
147 |
148 | ## Status
149 |
150 | 
151 |
152 | If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
153 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/__init__.py:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Ar-Ray-code/YOLOv5-ROS/54ba99bf5fab68b70a1890c6026cfb0e3983e308/yolov5_ros/yolov5_ros/utils/loggers/wandb/__init__.py
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/log_dataset.py:
--------------------------------------------------------------------------------
1 | import argparse
2 |
3 | from wandb_utils import WandbLogger
4 |
5 | from utils.general import LOGGER
6 |
7 | WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
8 |
9 |
10 | def create_dataset_artifact(opt):
11 | logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
12 | if not logger.wandb:
13 | LOGGER.info("install wandb using `pip install wandb` to log the dataset")
14 |
15 |
16 | if __name__ == '__main__':
17 | parser = argparse.ArgumentParser()
18 | parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
19 | parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
20 | parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
21 | parser.add_argument('--entity', default=None, help='W&B entity')
22 | parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
23 |
24 | opt = parser.parse_args()
25 | opt.resume = False # Explicitly disallow resume check for dataset upload job
26 |
27 | create_dataset_artifact(opt)
28 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/sweep.py:
--------------------------------------------------------------------------------
1 | import sys
2 | from pathlib import Path
3 |
4 | import wandb
5 |
6 | FILE = Path(__file__).resolve()
7 | ROOT = FILE.parents[3] # YOLOv5 root directory
8 | if str(ROOT) not in sys.path:
9 | sys.path.append(str(ROOT)) # add ROOT to PATH
10 |
11 | from train import parse_opt, train
12 | from utils.callbacks import Callbacks
13 | from utils.general import increment_path
14 | from utils.torch_utils import select_device
15 |
16 |
17 | def sweep():
18 | wandb.init()
19 | # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
20 | hyp_dict = vars(wandb.config).get("_items").copy()
21 |
22 | # Workaround: get necessary opt args
23 | opt = parse_opt(known=True)
24 | opt.batch_size = hyp_dict.get("batch_size")
25 | opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
26 | opt.epochs = hyp_dict.get("epochs")
27 | opt.nosave = True
28 | opt.data = hyp_dict.get("data")
29 | opt.weights = str(opt.weights)
30 | opt.cfg = str(opt.cfg)
31 | opt.data = str(opt.data)
32 | opt.hyp = str(opt.hyp)
33 | opt.project = str(opt.project)
34 | device = select_device(opt.device, batch_size=opt.batch_size)
35 |
36 | # train
37 | train(hyp_dict, opt, device, callbacks=Callbacks())
38 |
39 |
40 | if __name__ == "__main__":
41 | sweep()
42 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loggers/wandb/sweep.yaml:
--------------------------------------------------------------------------------
1 | # Hyperparameters for training
2 | # To set range-
3 | # Provide min and max values as:
4 | # parameter:
5 | #
6 | # min: scalar
7 | # max: scalar
8 | # OR
9 | #
10 | # Set a specific list of search space-
11 | # parameter:
12 | # values: [scalar1, scalar2, scalar3...]
13 | #
14 | # You can use grid, bayesian and hyperopt search strategy
15 | # For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
16 |
17 | program: utils/loggers/wandb/sweep.py
18 | method: random
19 | metric:
20 | name: metrics/mAP_0.5
21 | goal: maximize
22 |
23 | parameters:
24 | # hyperparameters: set either min, max range or values list
25 | data:
26 | value: "data/coco128.yaml"
27 | batch_size:
28 | values: [64]
29 | epochs:
30 | values: [10]
31 |
32 | lr0:
33 | distribution: uniform
34 | min: 1e-5
35 | max: 1e-1
36 | lrf:
37 | distribution: uniform
38 | min: 0.01
39 | max: 1.0
40 | momentum:
41 | distribution: uniform
42 | min: 0.6
43 | max: 0.98
44 | weight_decay:
45 | distribution: uniform
46 | min: 0.0
47 | max: 0.001
48 | warmup_epochs:
49 | distribution: uniform
50 | min: 0.0
51 | max: 5.0
52 | warmup_momentum:
53 | distribution: uniform
54 | min: 0.0
55 | max: 0.95
56 | warmup_bias_lr:
57 | distribution: uniform
58 | min: 0.0
59 | max: 0.2
60 | box:
61 | distribution: uniform
62 | min: 0.02
63 | max: 0.2
64 | cls:
65 | distribution: uniform
66 | min: 0.2
67 | max: 4.0
68 | cls_pw:
69 | distribution: uniform
70 | min: 0.5
71 | max: 2.0
72 | obj:
73 | distribution: uniform
74 | min: 0.2
75 | max: 4.0
76 | obj_pw:
77 | distribution: uniform
78 | min: 0.5
79 | max: 2.0
80 | iou_t:
81 | distribution: uniform
82 | min: 0.1
83 | max: 0.7
84 | anchor_t:
85 | distribution: uniform
86 | min: 2.0
87 | max: 8.0
88 | fl_gamma:
89 | distribution: uniform
90 | min: 0.0
91 | max: 4.0
92 | hsv_h:
93 | distribution: uniform
94 | min: 0.0
95 | max: 0.1
96 | hsv_s:
97 | distribution: uniform
98 | min: 0.0
99 | max: 0.9
100 | hsv_v:
101 | distribution: uniform
102 | min: 0.0
103 | max: 0.9
104 | degrees:
105 | distribution: uniform
106 | min: 0.0
107 | max: 45.0
108 | translate:
109 | distribution: uniform
110 | min: 0.0
111 | max: 0.9
112 | scale:
113 | distribution: uniform
114 | min: 0.0
115 | max: 0.9
116 | shear:
117 | distribution: uniform
118 | min: 0.0
119 | max: 10.0
120 | perspective:
121 | distribution: uniform
122 | min: 0.0
123 | max: 0.001
124 | flipud:
125 | distribution: uniform
126 | min: 0.0
127 | max: 1.0
128 | fliplr:
129 | distribution: uniform
130 | min: 0.0
131 | max: 1.0
132 | mosaic:
133 | distribution: uniform
134 | min: 0.0
135 | max: 1.0
136 | mixup:
137 | distribution: uniform
138 | min: 0.0
139 | max: 1.0
140 | copy_paste:
141 | distribution: uniform
142 | min: 0.0
143 | max: 1.0
144 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/loss.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | Loss functions
4 | """
5 |
6 | import torch
7 | import torch.nn as nn
8 |
9 | from yolov5_ros.utils.metrics import bbox_iou
10 | from yolov5_ros.utils.torch_utils import de_parallel
11 |
12 |
13 | def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
14 | # return positive, negative label smoothing BCE targets
15 | return 1.0 - 0.5 * eps, 0.5 * eps
16 |
17 |
18 | class BCEBlurWithLogitsLoss(nn.Module):
19 | # BCEwithLogitLoss() with reduced missing label effects.
20 | def __init__(self, alpha=0.05):
21 | super().__init__()
22 | self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
23 | self.alpha = alpha
24 |
25 | def forward(self, pred, true):
26 | loss = self.loss_fcn(pred, true)
27 | pred = torch.sigmoid(pred) # prob from logits
28 | dx = pred - true # reduce only missing label effects
29 | # dx = (pred - true).abs() # reduce missing label and false label effects
30 | alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
31 | loss *= alpha_factor
32 | return loss.mean()
33 |
34 |
35 | class FocalLoss(nn.Module):
36 | # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
37 | def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
38 | super().__init__()
39 | self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
40 | self.gamma = gamma
41 | self.alpha = alpha
42 | self.reduction = loss_fcn.reduction
43 | self.loss_fcn.reduction = 'none' # required to apply FL to each element
44 |
45 | def forward(self, pred, true):
46 | loss = self.loss_fcn(pred, true)
47 | # p_t = torch.exp(-loss)
48 | # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
49 |
50 | # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
51 | pred_prob = torch.sigmoid(pred) # prob from logits
52 | p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
53 | alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
54 | modulating_factor = (1.0 - p_t) ** self.gamma
55 | loss *= alpha_factor * modulating_factor
56 |
57 | if self.reduction == 'mean':
58 | return loss.mean()
59 | elif self.reduction == 'sum':
60 | return loss.sum()
61 | else: # 'none'
62 | return loss
63 |
64 |
65 | class QFocalLoss(nn.Module):
66 | # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
67 | def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
68 | super().__init__()
69 | self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
70 | self.gamma = gamma
71 | self.alpha = alpha
72 | self.reduction = loss_fcn.reduction
73 | self.loss_fcn.reduction = 'none' # required to apply FL to each element
74 |
75 | def forward(self, pred, true):
76 | loss = self.loss_fcn(pred, true)
77 |
78 | pred_prob = torch.sigmoid(pred) # prob from logits
79 | alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
80 | modulating_factor = torch.abs(true - pred_prob) ** self.gamma
81 | loss *= alpha_factor * modulating_factor
82 |
83 | if self.reduction == 'mean':
84 | return loss.mean()
85 | elif self.reduction == 'sum':
86 | return loss.sum()
87 | else: # 'none'
88 | return loss
89 |
90 |
91 | class ComputeLoss:
92 | sort_obj_iou = False
93 |
94 | # Compute losses
95 | def __init__(self, model, autobalance=False):
96 | device = next(model.parameters()).device # get model device
97 | h = model.hyp # hyperparameters
98 |
99 | # Define criteria
100 | BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
101 | BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
102 |
103 | # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
104 | self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
105 |
106 | # Focal loss
107 | g = h['fl_gamma'] # focal loss gamma
108 | if g > 0:
109 | BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
110 |
111 | m = de_parallel(model).model[-1] # Detect() module
112 | self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
113 | self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
114 | self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
115 | self.na = m.na # number of anchors
116 | self.nc = m.nc # number of classes
117 | self.nl = m.nl # number of layers
118 | self.anchors = m.anchors
119 | self.device = device
120 |
121 | def __call__(self, p, targets): # predictions, targets
122 | lcls = torch.zeros(1, device=self.device) # class loss
123 | lbox = torch.zeros(1, device=self.device) # box loss
124 | lobj = torch.zeros(1, device=self.device) # object loss
125 | tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
126 |
127 | # Losses
128 | for i, pi in enumerate(p): # layer index, layer predictions
129 | b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
130 | tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
131 |
132 | n = b.shape[0] # number of targets
133 | if n:
134 | # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
135 | pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
136 |
137 | # Regression
138 | pxy = pxy.sigmoid() * 2 - 0.5
139 | pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
140 | pbox = torch.cat((pxy, pwh), 1) # predicted box
141 | iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
142 | lbox += (1.0 - iou).mean() # iou loss
143 |
144 | # Objectness
145 | iou = iou.detach().clamp(0).type(tobj.dtype)
146 | if self.sort_obj_iou:
147 | j = iou.argsort()
148 | b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
149 | if self.gr < 1:
150 | iou = (1.0 - self.gr) + self.gr * iou
151 | tobj[b, a, gj, gi] = iou # iou ratio
152 |
153 | # Classification
154 | if self.nc > 1: # cls loss (only if multiple classes)
155 | t = torch.full_like(pcls, self.cn, device=self.device) # targets
156 | t[range(n), tcls[i]] = self.cp
157 | lcls += self.BCEcls(pcls, t) # BCE
158 |
159 | # Append targets to text file
160 | # with open('targets.txt', 'a') as file:
161 | # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
162 |
163 | obji = self.BCEobj(pi[..., 4], tobj)
164 | lobj += obji * self.balance[i] # obj loss
165 | if self.autobalance:
166 | self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
167 |
168 | if self.autobalance:
169 | self.balance = [x / self.balance[self.ssi] for x in self.balance]
170 | lbox *= self.hyp['box']
171 | lobj *= self.hyp['obj']
172 | lcls *= self.hyp['cls']
173 | bs = tobj.shape[0] # batch size
174 |
175 | return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
176 |
177 | def build_targets(self, p, targets):
178 | # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
179 | na, nt = self.na, targets.shape[0] # number of anchors, targets
180 | tcls, tbox, indices, anch = [], [], [], []
181 | gain = torch.ones(7, device=self.device) # normalized to gridspace gain
182 | ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
183 | targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
184 |
185 | g = 0.5 # bias
186 | off = torch.tensor(
187 | [
188 | [0, 0],
189 | [1, 0],
190 | [0, 1],
191 | [-1, 0],
192 | [0, -1], # j,k,l,m
193 | # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
194 | ],
195 | device=self.device).float() * g # offsets
196 |
197 | for i in range(self.nl):
198 | anchors = self.anchors[i]
199 | gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
200 |
201 | # Match targets to anchors
202 | t = targets * gain # shape(3,n,7)
203 | if nt:
204 | # Matches
205 | r = t[..., 4:6] / anchors[:, None] # wh ratio
206 | j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
207 | # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
208 | t = t[j] # filter
209 |
210 | # Offsets
211 | gxy = t[:, 2:4] # grid xy
212 | gxi = gain[[2, 3]] - gxy # inverse
213 | j, k = ((gxy % 1 < g) & (gxy > 1)).T
214 | l, m = ((gxi % 1 < g) & (gxi > 1)).T
215 | j = torch.stack((torch.ones_like(j), j, k, l, m))
216 | t = t.repeat((5, 1, 1))[j]
217 | offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
218 | else:
219 | t = targets[0]
220 | offsets = 0
221 |
222 | # Define
223 | bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
224 | a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
225 | gij = (gxy - offsets).long()
226 | gi, gj = gij.T # grid indices
227 |
228 | # Append
229 | indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
230 | tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
231 | anch.append(anchors[a]) # anchors
232 | tcls.append(c) # class
233 |
234 | return tcls, tbox, indices, anch
235 |
--------------------------------------------------------------------------------
/yolov5_ros/yolov5_ros/utils/torch_utils.py:
--------------------------------------------------------------------------------
1 | # YOLOv5 🚀 by Ultralytics, GPL-3.0 license
2 | """
3 | PyTorch utils
4 | """
5 |
6 | import math
7 | import os
8 | import platform
9 | import subprocess
10 | import time
11 | import warnings
12 | from contextlib import contextmanager
13 | from copy import deepcopy
14 | from pathlib import Path
15 |
16 | import torch
17 | import torch.distributed as dist
18 | import torch.nn as nn
19 | import torch.nn.functional as F
20 |
21 | from yolov5_ros.utils.general import LOGGER, file_update_date, git_describe
22 |
23 | try:
24 | import thop # for FLOPs computation
25 | except ImportError:
26 | thop = None
27 |
28 | # Suppress PyTorch warnings
29 | warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
30 |
31 |
32 | @contextmanager
33 | def torch_distributed_zero_first(local_rank: int):
34 | # Decorator to make all processes in distributed training wait for each local_master to do something
35 | if local_rank not in [-1, 0]:
36 | dist.barrier(device_ids=[local_rank])
37 | yield
38 | if local_rank == 0:
39 | dist.barrier(device_ids=[0])
40 |
41 |
42 | def device_count():
43 | # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Only works on Linux.
44 | assert platform.system() == 'Linux', 'device_count() function only works on Linux'
45 | try:
46 | cmd = 'nvidia-smi -L | wc -l'
47 | return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
48 | except Exception:
49 | return 0
50 |
51 |
52 | def select_device(device='', batch_size=0, newline=True):
53 | # device = 'cpu' or '0' or '0,1,2,3'
54 | s = f'YOLOv5 🚀 {git_describe() or file_update_date()} torch {torch.__version__} ' # string
55 | device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
56 | cpu = device == 'cpu'
57 | if cpu:
58 | os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
59 | elif device: # non-cpu device requested
60 | os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
61 | assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
62 | f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
63 |
64 | cuda = not cpu and torch.cuda.is_available()
65 | if cuda:
66 | devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
67 | n = len(devices) # device count
68 | if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
69 | assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
70 | space = ' ' * (len(s) + 1)
71 | for i, d in enumerate(devices):
72 | p = torch.cuda.get_device_properties(i)
73 | s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
74 | else:
75 | s += 'CPU\n'
76 |
77 | if not newline:
78 | s = s.rstrip()
79 | LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
80 | return torch.device('cuda:0' if cuda else 'cpu')
81 |
82 |
83 | def time_sync():
84 | # PyTorch-accurate time
85 | if torch.cuda.is_available():
86 | torch.cuda.synchronize()
87 | return time.time()
88 |
89 |
90 | def profile(input, ops, n=10, device=None):
91 | # YOLOv5 speed/memory/FLOPs profiler
92 | #
93 | # Usage:
94 | # input = torch.randn(16, 3, 640, 640)
95 | # m1 = lambda x: x * torch.sigmoid(x)
96 | # m2 = nn.SiLU()
97 | # profile(input, [m1, m2], n=100) # profile over 100 iterations
98 |
99 | results = []
100 | device = device or select_device()
101 | print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
102 | f"{'input':>24s}{'output':>24s}")
103 |
104 | for x in input if isinstance(input, list) else [input]:
105 | x = x.to(device)
106 | x.requires_grad = True
107 | for m in ops if isinstance(ops, list) else [ops]:
108 | m = m.to(device) if hasattr(m, 'to') else m # device
109 | m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
110 | tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
111 | try:
112 | flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
113 | except Exception:
114 | flops = 0
115 |
116 | try:
117 | for _ in range(n):
118 | t[0] = time_sync()
119 | y = m(x)
120 | t[1] = time_sync()
121 | try:
122 | _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
123 | t[2] = time_sync()
124 | except Exception: # no backward method
125 | # print(e) # for debug
126 | t[2] = float('nan')
127 | tf += (t[1] - t[0]) * 1000 / n # ms per op forward
128 | tb += (t[2] - t[1]) * 1000 / n # ms per op backward
129 | mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
130 | s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
131 | s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
132 | p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
133 | print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
134 | results.append([p, flops, mem, tf, tb, s_in, s_out])
135 | except Exception as e:
136 | print(e)
137 | results.append(None)
138 | torch.cuda.empty_cache()
139 | return results
140 |
141 |
142 | def is_parallel(model):
143 | # Returns True if model is of type DP or DDP
144 | return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
145 |
146 |
147 | def de_parallel(model):
148 | # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
149 | return model.module if is_parallel(model) else model
150 |
151 |
152 | def initialize_weights(model):
153 | for m in model.modules():
154 | t = type(m)
155 | if t is nn.Conv2d:
156 | pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
157 | elif t is nn.BatchNorm2d:
158 | m.eps = 1e-3
159 | m.momentum = 0.03
160 | elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
161 | m.inplace = True
162 |
163 |
164 | def find_modules(model, mclass=nn.Conv2d):
165 | # Finds layer indices matching module class 'mclass'
166 | return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
167 |
168 |
169 | def sparsity(model):
170 | # Return global model sparsity
171 | a, b = 0, 0
172 | for p in model.parameters():
173 | a += p.numel()
174 | b += (p == 0).sum()
175 | return b / a
176 |
177 |
178 | def prune(model, amount=0.3):
179 | # Prune model to requested global sparsity
180 | import torch.nn.utils.prune as prune
181 | print('Pruning model... ', end='')
182 | for name, m in model.named_modules():
183 | if isinstance(m, nn.Conv2d):
184 | prune.l1_unstructured(m, name='weight', amount=amount) # prune
185 | prune.remove(m, 'weight') # make permanent
186 | print(' %.3g global sparsity' % sparsity(model))
187 |
188 |
189 | def fuse_conv_and_bn(conv, bn):
190 | # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
191 | fusedconv = nn.Conv2d(conv.in_channels,
192 | conv.out_channels,
193 | kernel_size=conv.kernel_size,
194 | stride=conv.stride,
195 | padding=conv.padding,
196 | groups=conv.groups,
197 | bias=True).requires_grad_(False).to(conv.weight.device)
198 |
199 | # Prepare filters
200 | w_conv = conv.weight.clone().view(conv.out_channels, -1)
201 | w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
202 | fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
203 |
204 | # Prepare spatial bias
205 | b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
206 | b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
207 | fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
208 |
209 | return fusedconv
210 |
211 |
212 | def model_info(model, verbose=False, img_size=640):
213 | # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
214 | n_p = sum(x.numel() for x in model.parameters()) # number parameters
215 | n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
216 | if verbose:
217 | print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
218 | for i, (name, p) in enumerate(model.named_parameters()):
219 | name = name.replace('module_list.', '')
220 | print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
221 | (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
222 |
223 | try: # FLOPs
224 | from thop import profile
225 | stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
226 | img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
227 | flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
228 | img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
229 | fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
230 | except (ImportError, Exception):
231 | fs = ''
232 |
233 | name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
234 | LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
235 |
236 |
237 | def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
238 | # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
239 | if ratio == 1.0:
240 | return img
241 | else:
242 | h, w = img.shape[2:]
243 | s = (int(h * ratio), int(w * ratio)) # new size
244 | img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
245 | if not same_shape: # pad/crop img
246 | h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
247 | return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
248 |
249 |
250 | def copy_attr(a, b, include=(), exclude=()):
251 | # Copy attributes from b to a, options to only include [...] and to exclude [...]
252 | for k, v in b.__dict__.items():
253 | if (len(include) and k not in include) or k.startswith('_') or k in exclude:
254 | continue
255 | else:
256 | setattr(a, k, v)
257 |
258 |
259 | class EarlyStopping:
260 | # YOLOv5 simple early stopper
261 | def __init__(self, patience=30):
262 | self.best_fitness = 0.0 # i.e. mAP
263 | self.best_epoch = 0
264 | self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
265 | self.possible_stop = False # possible stop may occur next epoch
266 |
267 | def __call__(self, epoch, fitness):
268 | if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
269 | self.best_epoch = epoch
270 | self.best_fitness = fitness
271 | delta = epoch - self.best_epoch # epochs without improvement
272 | self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
273 | stop = delta >= self.patience # stop training if patience exceeded
274 | if stop:
275 | LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
276 | f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
277 | f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
278 | f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
279 | return stop
280 |
281 |
282 | class ModelEMA:
283 | """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
284 | Keeps a moving average of everything in the model state_dict (parameters and buffers)
285 | For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
286 | """
287 |
288 | def __init__(self, model, decay=0.9999, tau=2000, updates=0):
289 | # Create EMA
290 | self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
291 | # if next(model.parameters()).device.type != 'cpu':
292 | # self.ema.half() # FP16 EMA
293 | self.updates = updates # number of EMA updates
294 | self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
295 | for p in self.ema.parameters():
296 | p.requires_grad_(False)
297 |
298 | def update(self, model):
299 | # Update EMA parameters
300 | with torch.no_grad():
301 | self.updates += 1
302 | d = self.decay(self.updates)
303 |
304 | msd = de_parallel(model).state_dict() # model state_dict
305 | for k, v in self.ema.state_dict().items():
306 | if v.dtype.is_floating_point:
307 | v *= d
308 | v += (1 - d) * msd[k].detach()
309 |
310 | def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
311 | # Update EMA attributes
312 | copy_attr(self.ema, model, include, exclude)
313 |
--------------------------------------------------------------------------------