├── LICENSE.md
├── README.md
└── Raspberry Pi
├── README.md
├── nunchuck.py
└── setup.py
/LICENSE.md:
--------------------------------------------------------------------------------
1 | Nunchuck Python module by Jason Barnett
2 |
3 | This module and examples are licensed under the "Attribution-ShareAlike 3.0 Unported" (CC BY-SA 3.0)
4 |
5 | You may copy and modify the code, but keep original credit to the author and list changes made.
6 |
7 | A link to the full description is available:
8 | http://creativecommons.org/licenses/by-sa/3.0/
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | ## Nunchuck
2 |
3 | This contains files required for using the Multichuck Adaptor for Raspberry Pi and Arduino.
4 |
5 | The adaptor will be available soon.
6 |
7 | ## Files
8 |
9 | - Raspberry Pi/nunchuck.py - Python module you'll import into your script
10 |
11 |
12 |
13 |
14 | Enjoy!
15 |
16 | Jason
17 |
18 | Twitter @boeeerb
19 |
20 | http://www.boeeerb.co.uk
21 |
22 | Buy from http://xxx
23 |
24 | Donations are always welcome and much appreciated!
25 | BTC - 152kFrxyJ4GNVmqNfbywzvVFBFhJmnPBsV
26 |
--------------------------------------------------------------------------------
/Raspberry Pi/README.md:
--------------------------------------------------------------------------------
1 | ## Raspberry Pi
2 |
3 | ### Requirements
4 |
5 | sudo apt-get install python-smbus
6 |
7 |
8 | ### Functions
9 |
10 | The functions of nunchuk are:
11 |
12 | ```python
13 | from nunchuck import nunchuck
14 | wii = nunchuck()
15 |
16 | wii.raw() # Returns all the data in raw
17 | wii.joystick() # Returns just the X and Y positions of the joystick
18 | wii.accelerometer() # Returns X, Y and Z positions of the accelerometer
19 | wii.button_c() # Returns True if C button is pressed, False if not
20 | wii.button_z() # Returns True if Z button is pressed, False if not
21 |
22 | wii.joystick_x() # Returns just the X position of the joystick
23 | wii.joystick_y() # Returns just the Y position of the joystick
24 | wii.accelerometer_x() # Returns just the X position of the accelerometer
25 | wii.accelerometer_y() # Returns just the Y position of the accelerometer
26 | wii.accelerometer_z() # Returns just the Z position of the accelerometer
27 |
28 | wii.scale(value,min,max,out_min,out_max) # Works the same as Arduino Map, perfect for changing values returned to a different scale, ie -100 - +100
29 | ```
30 |
31 |
32 | ### Installation instructions
33 |
34 | #### Preparation
35 |
36 | First to download and install the required libraries
37 |
38 | sudo apt-get update
39 | sudo apt-get install python-smbus -y
40 |
41 |
42 | - SMBus is required to talk over i2c bus with the Nunchuck
43 |
44 |
45 | To enable the i2c driver you need to make a few changes
46 |
47 | sudo nano /etc/modules
48 |
49 | Then make sure the following is at the end of the file
50 |
51 | i2c-dev
52 | i2c-bcm2708
53 |
54 | So it looks like this:
55 |
56 | 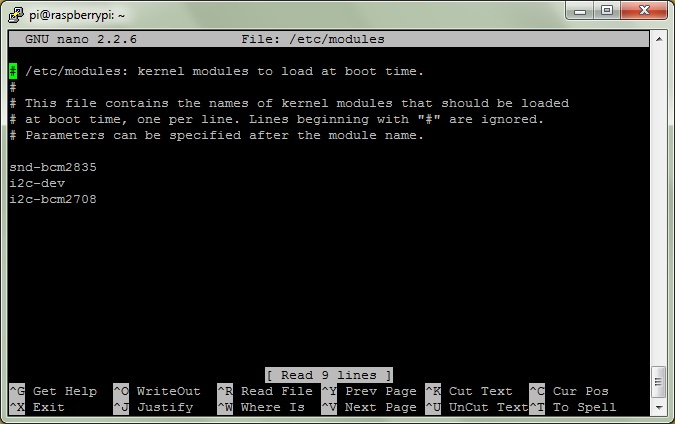 57 |
57 |
58 |
59 | Ctrl + x and Y to exit save the file, now edit the next
60 |
61 | sudo nano /etc/modprobe.d/raspi-blacklist.conf
62 |
63 | And add the #'s to the beginning of each line so it looks like:
64 |
65 |
66 | 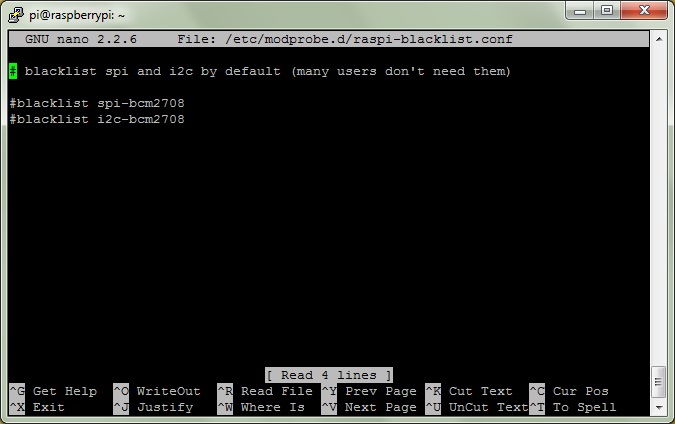 67 |
67 |
68 |
69 | Ctrl + x and Y to exit and save the file, now reboot
70 |
71 | sudo reboot
72 |
73 | #### Downloading
74 |
75 | To be completed
76 |
--------------------------------------------------------------------------------
/Raspberry Pi/nunchuck.py:
--------------------------------------------------------------------------------
1 | ##########################################
2 | ## Python module to read a Wii nunchuck ##
3 | ## ##
4 | ## Written by Jason - @Boeeerb ##
5 | ## jase@boeeerb.co.uk ##
6 | ##########################################
7 | ##
8 | ## v0.1 03/05/14 - Initital release
9 | ## v0.2 21/06/14 - Retrieve one byte at a time [Simon Walters - @cymplecy]
10 | ## v0.3 22/06/14 - Minor Refactoring [Jack Wearden - @JackWeirdy]
11 | ## v0.32 25/6/14 - XOR each data byte with 0x17 and then add 0x17 to produce corrent values - Simon Walters @cymplecy
12 | ## v0.4 26/6/14 - Change method of XOR and add delay parameter - Simon Walters @cymplecy
13 | ## v0.41 30/3/15 - Adding support for RPI_REVISION 3 - John Lumley @Jelby-John
14 |
15 | from smbus import SMBus
16 | import RPi.GPIO as rpi
17 | import time as time
18 |
19 | bus = 0
20 |
21 | class nunchuck:
22 |
23 | def __init__(self,delay = 0.05):
24 | self.delay = delay
25 | if rpi.RPI_REVISION == 1:
26 | i2c_bus = 0
27 | elif rpi.RPI_REVISION == 2:
28 | i2c_bus = 1
29 | elif rpi.RPI_REVISION == 3:
30 | i2c_bus = 1
31 | else:
32 | print "Unable to determine Raspberry Pi revision."
33 | exit
34 | self.bus = SMBus(i2c_bus)
35 | self.bus.write_byte_data(0x52,0x40,0x00)
36 | time.sleep(0.1)
37 |
38 | def read(self):
39 | self.bus.write_byte(0x52,0x00)
40 | time.sleep(self.delay)
41 | temp = [(0x17 + (0x17 ^ self.bus.read_byte(0x52))) for i in range(6)]
42 | return temp
43 |
44 | def raw(self):
45 | data = self.read()
46 | return data
47 |
48 | def joystick(self):
49 | data = self.read()
50 | return data[0],data[1]
51 |
52 | def accelerometer(self):
53 | data = self.read()
54 | return data[2],data[3],data[4]
55 |
56 | def button_c(self):
57 | data = self.read()
58 | butc = (data[5] & 0x02)
59 |
60 | return butc == 0
61 |
62 | def button_z(self):
63 | data = self.read()
64 | butc = (data[5] & 0x01)
65 |
66 | return butc == 0
67 |
68 | def joystick_x(self):
69 | data = self.read()
70 | return data[0]
71 |
72 | def joystick_y(self):
73 | data = self.read()
74 | return data[1]
75 |
76 | def accelerometer_x(self):
77 | data = self.read()
78 | return data[2]
79 |
80 | def accelerometer_y(self):
81 | data = self.read()
82 | return data[3]
83 |
84 | def accelerometer_z(self):
85 | data = self.read()
86 | return data[4]
87 |
88 | def setdelay(self,delay):
89 | self.delay = delay
90 |
91 |
92 | def scale(self,value,_min,_max,_omin,_omax):
93 | return (value - _min) * (_omax - _omin) // (_max - _min) + _omin
94 |
95 |
--------------------------------------------------------------------------------
/Raspberry Pi/setup.py:
--------------------------------------------------------------------------------
1 | from distutils.core import setup
2 |
3 | classifiers = ['Development Status :: 4 - Beta',
4 | 'Operating System :: POSIX :: Linux',
5 | 'Intended Audience :: Developers',
6 | 'Programming Language :: Python :: 2.7',
7 | 'Topic :: Software Development',
8 | 'Topic :: System :: Hardware']
9 |
10 | setup(name = 'Nunchuck_pi',
11 | version = '0.1',
12 | author = 'Jason Barnett',
13 | author_email = 'jase@boeeerb.co.uk',
14 | description = 'A module to read a wii nunchuck for Raspberry Pi',
15 | long_description= 'A module to read a wii nunchuck for Raspberry Pi',
16 | license = 'CC BY-SA 3.0',
17 | keywords = 'Raspberry Pi Nunchuck',
18 | url = 'http://www.boeeerb.co.uk',
19 | classifiers = classifiers,
20 | py_modules = ['nunchuck'],
21 | install_requires= ['rpi.gpio >= 0.5.4']
22 | )
--------------------------------------------------------------------------------