├── ArduinoFiles
└── README.TXT
├── README.md
├── ScratchFiles
├── ExtensionDescriptors
│ ├── P4K_Extension.s2e
│ ├── s2a_fm.s2e
│ ├── s2a_fm_DE.s2e
│ ├── s2a_fm_Es.s2e
│ ├── s2a_fm_Fr.s2e
│ ├── s2a_fm_GR.s2e
│ ├── s2a_fm_It.s2e
│ ├── s2a_fm_NL.s2e
│ ├── s2a_fm_Pt.s2e
│ ├── s2a_fm_ja.s2e
│ ├── s2a_fm_ja2.s2e
│ ├── s2a_fm_ko.s2e
│ ├── s2a_fm_zh_cn.s2e
│ └── s2a_fm_zh_tw.s2e
└── ScratchProjects
│ ├── P4K_Extension.sb2
│ ├── Turn On LED On Pin 6.sb2
│ ├── s2a_fm_base.sb2
│ ├── s2a_fm_base_DE.sb2
│ ├── s2a_fm_base_Es.sb2
│ ├── s2a_fm_base_Fr.sb2
│ ├── s2a_fm_base_GR.sb2
│ ├── s2a_fm_base_It.sb2
│ ├── s2a_fm_base_Pt.sb2
│ ├── s2a_fm_base_ja.sb2
│ ├── s2a_fm_base_ko.sb2
│ ├── s2a_fm_base_nl.sb2
│ ├── s2a_fm_base_zh_cn.sb2
│ ├── s2a_fm_base_zh_tw.sb2
│ ├── sonarTest.sb2
│ └── spinning_cat.sb2
├── Snap!Files
├── Español
│ ├── blink.xml
│ ├── blink_tiempo_variable.xml
│ ├── boton.xml
│ ├── boton_con_imagen.xml
│ ├── contador1.xml
│ ├── contador2.xml
│ ├── s2a_fm_Snap_base_Es.xml
│ ├── semaforo_tiempo_variable.xml
│ ├── servo1.xml
│ └── servo2.xml
├── S2a_fm_Pt.xml
├── Snap!Mobile
│ ├── StandardFirmataYun
│ │ └── StandardFirmataYun
│ │ │ └── StandardFirmataYun.ino
│ ├── arduino
│ │ ├── PyMata
│ │ │ ├── __init__.py
│ │ │ ├── pymata.py
│ │ │ ├── pymata_command_handler.py
│ │ │ └── pymata_serial.py
│ │ ├── log
│ │ │ └── s2a_fm_debugging.log
│ │ ├── s2a_fm.py
│ │ ├── scratch_command_handlers.py
│ │ ├── scratch_http_server.py
│ │ ├── serial
│ │ │ ├── __init__.py
│ │ │ ├── rfc2217.py
│ │ │ ├── serialcli.py
│ │ │ ├── serialjava.py
│ │ │ ├── serialposix.py
│ │ │ ├── serialutil.py
│ │ │ ├── serialwin32.py
│ │ │ ├── sermsdos.py
│ │ │ ├── tools
│ │ │ │ ├── __init__.py
│ │ │ │ ├── list_ports.py
│ │ │ │ ├── list_ports_linux.py
│ │ │ │ ├── list_ports_osx.py
│ │ │ │ ├── list_ports_posix.py
│ │ │ │ ├── list_ports_windows.py
│ │ │ │ └── miniterm.py
│ │ │ ├── urlhandler
│ │ │ │ ├── __init__.py
│ │ │ │ ├── protocol_hwgrep.py
│ │ │ │ ├── protocol_loop.py
│ │ │ │ ├── protocol_rfc2217.py
│ │ │ │ └── protocol_socket.py
│ │ │ └── win32.py
│ │ └── xlate.cfg
│ └── wiredMotorTest.xml
├── Turn On LED On Pin 6.xml
├── blink.xml
├── s2a_fm_Snap_base.xml
├── s2a_fm_Snap_base_DE.xml
├── s2a_fm_Snap_base_Es.xml
├── s2a_fm_Snap_base_FR.xml
├── s2a_fm_Snap_base_GR.xml
├── s2a_fm_Snap_base_It.xml
├── s2a_fm_Snap_base_dutch.xml
├── s2a_fm_Snap_base_ko.xml
├── s2a_fm_Snap_base_zh_cn.xml
├── s2a_fm_Snap_base_zh_tw.xml
└── spinning_sprite.xml
├── documentation
├── Español
│ └── s2a_fm_Espanish_tutorial.pdf
├── LED_EXAMPLE.png
├── pot1.png
├── s2a_fm_reference - 完成稿.pdf
├── s2a_fm_reference.pdf
├── s2a_fm_參考文件.pdf
├── scratch_blocks.png
├── scratch_langs.png
└── snap_blocks.png
├── extra_goodies
├── linux
│ └── s2a_fm.sh
└── windows
│ └── s2a_fm.bat
├── license.txt
├── s2a_fm.py
├── scratch_command_handlers.py
├── scratch_http_server.py
└── xlate.cfg
/ArduinoFiles/README.TXT:
--------------------------------------------------------------------------------
1 | All custom Arduino Firmata sketches may be found in PyMata @ https://github.com/MrYsLab/PyMata
2 |
3 | You can also use StandardFirmata supplied with the Arduino IDE, if you do not need the extended features of the custom
4 | sketches.
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | s2a_fm
2 | ======
3 |
4 | [](https://gitter.im/MrYsLab/s2a_fm?utm_source=badge&utm_medium=badge&utm_campaign=pr-badge&utm_content=badge)
5 |
6 |  7 |
7 |
8 |
9 | # A New Version For Python 3.5, called s2aio, Is Available [Here](https://github.com/MrYsLab/s2aio/wiki).
10 |
11 | Arduino users! Would you like to configure and control your Arduino micro-controller without having
12 | to write a single line of Arduino sketch code and at the same time have access to a graphical user
13 | interface?
14 |
15 | Scratch and Snap! programmers! Would you like to control and communicate with an Arduino board using
16 | Scratch? Imagine, using Scratch to control physical devices such as LEDs, motors, and relays while
17 | monitoring devices, such as temperature sensors, potentiometers, and light sensors. What would you
18 | create?
19 |
20 | Want to do motor control using Snap! and Wifi? Check out our article on Physical Computing.
21 | http://www.instructables.com/id/The-SnapMobile-Start-Your-Physical-Computing-Engin/
22 |
23 | All the code is included here!
24 |
25 | s2a_fm is a Scratch/Snap! hardware extension written in Python allowing Scratch or Snap! and an Arduino
26 | micro-controller to communicate seamlessly.
27 |
28 | Program Block translations are included for Chinese, Dutch, English (default), French, German, Greek, Italian, Korean, Portuguese, Spanish, and Taiwanese.
29 |
30 | Make sure you get the latest version of the Scratch Off-Line editor if you are using Scratch (version 404 or greater).
31 |
32 | Check Out Our Blog
33 | ------------------
34 | http://mryslab.blogspot.com/
35 |
36 | Installation Instructions
37 | --------------------------
38 | The s2a_fm Reference Manual, s2a_fm_reference.pdf, located in the documentation directory of this distribution,
39 | provides full installation instructions.
40 |
41 | Alternative Japanese Block Translation May 30, 2017
42 | --------------------------------------
43 | Translations provided through the generosity of Hiroaki Kawashima
44 |
45 | Japanese Block Translation Oct 17 2016
46 | --------------------------------------
47 | Translations provided through the generosity of Antoine Choppin
48 |
49 | Greek Block Translation Feb 3, 2015
50 | -----------------------------------
51 | Translations provided through the generosity of Alexandros Moskofidis
52 |
53 | Italian Block Translation Dec 12, 2014
54 | ---------------------------------------
55 | Translations provided through the generosity of Gianfranco Zuliani
56 |
57 | New Language Translation October 9, 2014
58 | ------------------------
59 | Taiwanese translation provided through the courtesy of Hsu Jen-Chieh.
60 |
61 | Version 1.5 Apr 12, 2014
62 | ------------------------
63 | New Features for 1.5
64 |
65 | Korean translation provided through the generosity of Dr. Eungil Kim
66 |
67 | Portuguese and German translations of Block Text provided through the generosity of
68 | Aldo von Wangenheim, from www.computacaonaescola.ufsc.br
69 |
70 | A Chinese translation of the reference manual was graciously provided by Yufangjun 发自我的小米手机
71 |
72 | Version 1.4 Mar 23, 2014
73 | -----------------------
74 | New Feature for 1.4
75 |
76 | Chinese translation of Block Text provided through the generosity of Professor YuFangjun
77 |
78 | French translation of Block Text provided through the generosity of Professor Sebastien Canet
79 | .
80 |
81 | Version 1.3 Feb 23, 2014
82 | ------------------------
83 | New Features for 1.3
84 |
85 | 1. Support for the upcoming Snap!Mobile Physical Computing Project in "Instructables"
86 |
87 | 2. Spanish Translation of Block Text and a Spanish Tutorial provided courtesy of Professor
88 | José Manuel Ruiz
89 |
90 |
91 | Version 1.2 Jan 1, 2014
92 | -----------------------
93 | New Features for 1.2:
94 |
95 | 1. Support for Snap! 4.0 provided.
96 |
97 | 2. Support for up to 4 simultaneous HC-SR04 type "Ping" Sensors.
98 | (This requires using PyMata version 1.54 or greater and the FirmataPlus Arduino sketch supplied with PyMata 1.54).
99 |
100 | 3. Dutch translation for the Scratch/Snap! Block Text included (Thanks to Sjoerd Dirk Meijer).
101 |
102 | 4. Provision to translate Scratch/Snap! Block Text to any language.
103 |
104 | Version 1.1 December 19, 2013
105 | -----------------------------
106 |
107 | New Features for 1.1:
108 |
109 | 1. When enabling a digital pin, the pin capabilty is verified for the requested mode.
110 |
111 | 2. A new Scratch debugger command block has been added to help debug Scratch scripts.
112 |
113 | Known Snap! 4.0 Extension Issues
114 | ----------------------
115 | None.
116 |
117 |
118 | Known Scratch 2.0 Extension Issues
119 | ------------
120 | All previous major issues have been resolved as of version 404 of the Off-Line editor.
121 |
122 | None.
123 |
124 | Scratch s2a_fm Extension Blocks
125 | -------------------------------
126 |
127 | 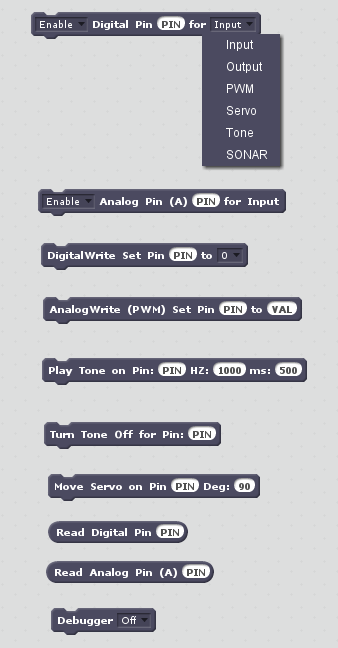
128 |
129 | Snap! s2a_fm Extension Blocks
130 | -----------------------------
131 | 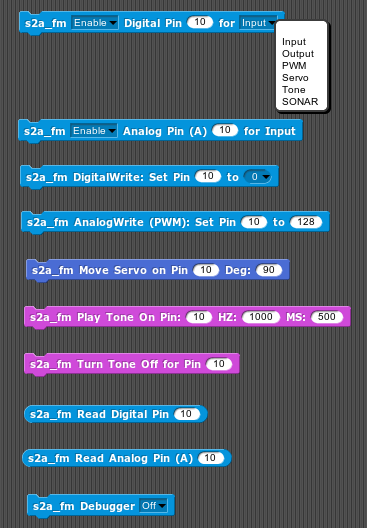
132 |
133 | Wiring Diagrams for Examples
134 | ----------------------------
135 |
136 | 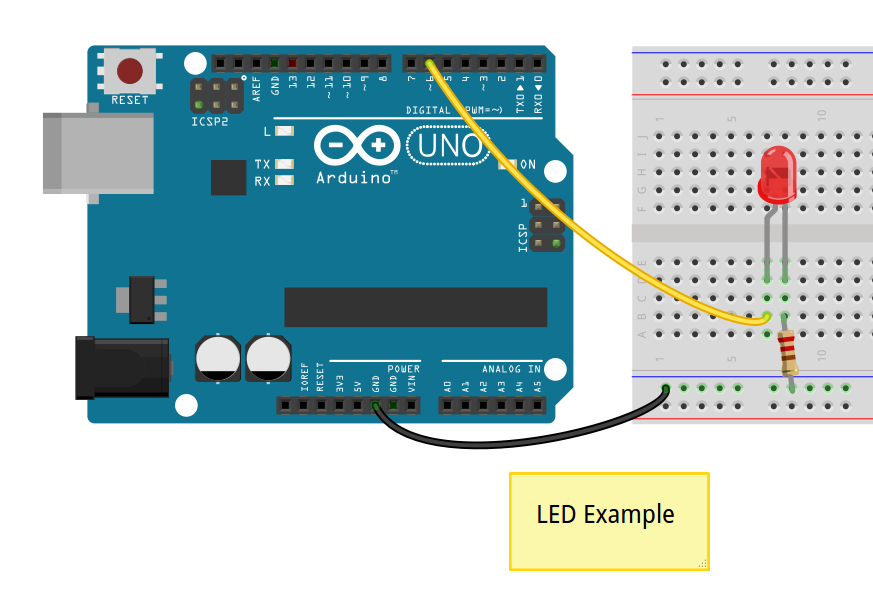
137 |
138 | 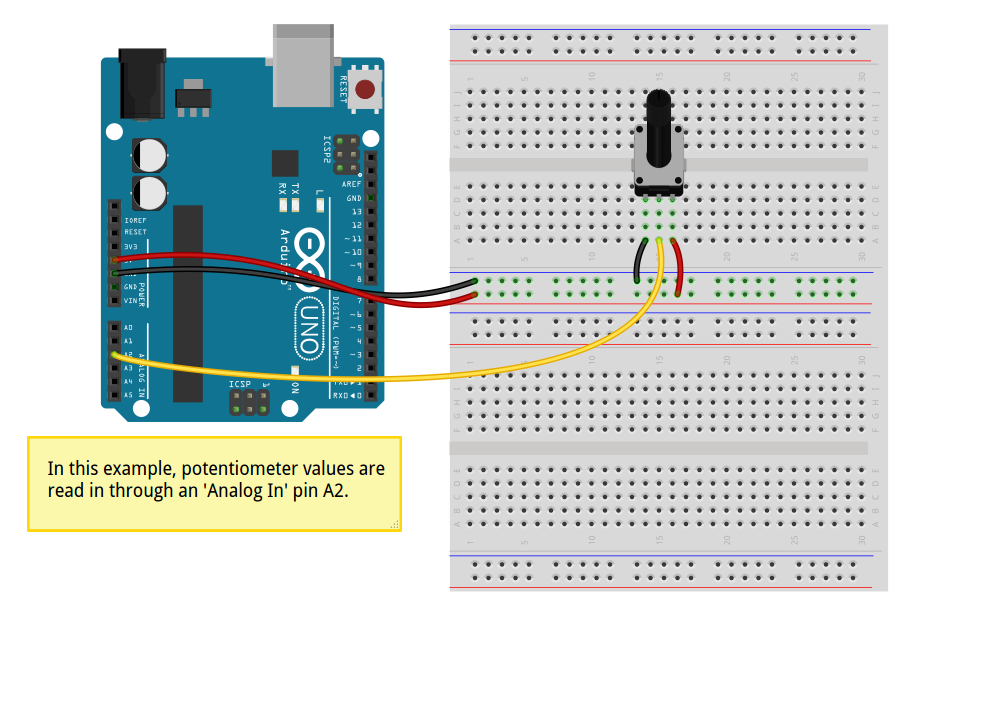
139 |
140 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/P4K_Extension.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "P4K Extension",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/s2a_fm",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state Digital Pin %n for %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "Enable",
11 | "PIN",
12 | "Input"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state Analog Pin (A) %n for Input",
17 | "analog_pin_mode",
18 | "Enable",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "DigitalWrite Set Pin %n to %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "AnalogWrite (PWM) Set Pin %n to %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Play Tone on Pin: %n HZ: %n ms: %n",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Turn Tone Off for Pin: %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Move Servo on Pin %n Deg: %n",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "Read Digital Pin %n",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "Read Analog Pin (A) %n",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Debugger %m.off_on",
71 | "debugger",
72 | "Off"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "Enable",
78 | "Disable"
79 | ],
80 | "digital_pin_mode": [
81 | "Input",
82 | "Output",
83 | "PWM",
84 | "Servo",
85 | "Tone",
86 | "SONAR"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "Off",
94 | "On"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch to Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state Digital Pin %n for %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "Enable",
11 | "PIN",
12 | "Input"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state Analog Pin (A) %n for Input",
17 | "analog_pin_mode",
18 | "Enable",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "DigitalWrite Set Pin %n to %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "AnalogWrite (PWM) Set Pin %n to %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Play Tone on Pin: %n HZ: %n ms: %n",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Turn Tone Off for Pin: %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Move Servo on Pin %n Deg: %n",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "Read Digital Pin %n",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "Read Analog Pin (A) %n",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Debugger %m.off_on",
71 | "debugger",
72 | "Off"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "Enable",
78 | "Disable"
79 | ],
80 | "digital_pin_mode": [
81 | "Input",
82 | "Output",
83 | "PWM",
84 | "Servo",
85 | "Tone",
86 | "SONAR"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "Off",
94 | "On"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_DE.s2e:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ExtensionDescriptors/s2a_fm_DE.s2e
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_Es.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch para Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state PIN Digital %n como %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "Activar",
11 | "PIN",
12 | "Entrada"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state PIN Anal�gico (A) %n como entrada",
17 | "analog_pin_mode",
18 | "Activar",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "Valor Digital en PIN %n poner a %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "Escribir valor Anal�gico(PWM) en Pin %n poner a %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Generar Tono en PIN: %n HZ: %n MS: %n",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Apagar Tono en PIN: %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Mover Servo en Pin %n Grados: %n",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "Leer PIN Digital %n",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "Leer PIN Anal�gico(A) %n",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Depurar %m.off_on",
71 | "debugger",
72 | "No"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "Activar",
78 | "Desactivar"
79 | ],
80 | "digital_pin_mode": [
81 | "Entrada",
82 | "Salida",
83 | "PWM",
84 | "Servo",
85 | "Tono",
86 | "SONAR"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "No",
94 | "Si"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_Fr.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "Scratch pour Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state la broche Digital %n comme une %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "Activer",
11 | "PIN",
12 | "entrée."
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state la broche Analogique A%n comme une entrée",
17 | "analog_pin_mode",
18 | "Activer",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "Mettre l'état logique de la broche Digital %n à %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "Ecrire sur la broche PWM %n la valeur %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Jouer le son sur la broche %n , fréquence (Hz) : %n , durée (ms) : %n",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Arrêter le son sur la broche : %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Tourner le servo-moteur sur la broche %n de : %n degrés",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "l'état logique de la broche Digital %n",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "la valeur sur la broche Analogique A%n",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Debugger %m.off_on",
71 | "debugger",
72 | "Arrêt"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "Activer",
78 | "Désactiver"
79 | ],
80 | "digital_pin_mode": [
81 | "entrée.",
82 | "sortie.",
83 | "impulsion PWM.",
84 | "rotation Servo-moteur.",
85 | "sortie Son.",
86 | "mesure Sonar."
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "Arrêt",
94 | "Marche"
95 | ]
96 | }
97 | }
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_GR.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch για το Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state Ψηφιακό PIN %n για %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "Ενεργοποίηση",
11 | "PIN",
12 | "Είσοδο"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state Αναλογικό PIN (A) %n για Είσοδο",
17 | "analog_pin_mode",
18 | "Ενεργοποίηση",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "Ψηφιακή Εγγραφή όρισε Pin %n σε %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "Αναλογική Εγγραφή (PWM) όρισε Pin %n σε %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Παίξε τόνο στο Pin: %n HZ: %n για ms: %n",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Σταμάτησε τόνο στο Pin: %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Μετακίνησε το Σέρβο στο Pin %n κατά μοίρες: %n",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "Διάβασε Ψηφιακή Είσοδο στο Pin %n",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "Διάβασε Αναλογική Είσοδο στο Pin (A) %n",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Αποσφαλματωτής %m.off_on",
71 | "debugger",
72 | "Κλείσιμο"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "Ενεργοποίηση",
78 | "Απενεργοποίηση"
79 | ],
80 | "digital_pin_mode": [
81 | "Είσοδο",
82 | "Έξοδο",
83 | "PWM",
84 | "Σέρβο",
85 | "Τόνος",
86 | "Σόναρ"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "Κλείσιμο",
94 | "Άνοιγμα"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_It.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch per Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state Pin Digitale %n come %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "Attiva",
11 | "PIN",
12 | "Ingresso"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state Pin Analogico (A) %n come Ingresso",
17 | "analog_pin_mode",
18 | "Attiva",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "Imposta Pin Digitale %n a %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "Imposta Pin Analogico (PWM) %n a %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Esegui Tono su Pin %n Frequenza: %n Hz Durata: %n ms",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Interrompi Tono su Pin %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Sposta Servo su Pin %n Posizione: %n gradi",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "Livello Logico Pin Digitale %n",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "Valore Pin Analogico (A) %n",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Debugger %m.off_on",
71 | "debugger",
72 | "No"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "Attiva",
78 | "Disattiva"
79 | ],
80 | "digital_pin_mode": [
81 | "Ingresso",
82 | "Uscita",
83 | "PWM",
84 | "Servo",
85 | "Tono",
86 | "Sonar"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "No",
94 | "Si"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_NL.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch voor Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "Zet %m.pin_state : Digitale pin %n als %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "aan",
11 | "PIN",
12 | "ingang"
13 | ],
14 | [
15 | " ",
16 | "Zet %m.pin_state : Analoge pin (A) %n als ingang",
17 | "analog_pin_mode",
18 | "aan",
19 | "PIN"
20 | ],
21 | [
22 | "",
23 | "DigitalWrite: Maak pin %n %m.high_low",
24 | "digital_write",
25 | "PIN",
26 | 0
27 | ],
28 | [
29 | "",
30 | "AnalogWrite (PWM): Maak pin %n %n",
31 | "analog_write",
32 | "PIN",
33 | "VAL"
34 | ],
35 | [
36 | "",
37 | "Speel toon op pin %n , Hz: %n , ms: %n",
38 | "play_tone",
39 | "PIN",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "Zet toon uit op pin %n",
46 | "tone_off",
47 | "PIN"
48 | ],
49 | [
50 | "",
51 | "Draai servo op pin %n %n graden",
52 | "set_servo_position",
53 | "PIN",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "Lees digitale pin %n uit",
59 | "digital_read",
60 | "PIN"
61 | ],
62 | [
63 | "r",
64 | "Lees analoge pin (A) %n uit",
65 | "analog_read",
66 | "PIN"
67 | ],
68 | [
69 | "",
70 | "Debugger %m.off_on",
71 | "debugger",
72 | "uitgeschakeld"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "aan",
78 | "uit"
79 | ],
80 | "digital_pin_mode": [
81 | "ingang",
82 | "uitgang",
83 | "PWM",
84 | "servo",
85 | "toon",
86 | "afstand"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "ingeschakeld",
94 | "uitgeschakeld"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_Pt.s2e:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ExtensionDescriptors/s2a_fm_Pt.s2e
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_ja.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - アルドゥイーノ用スクラッチ",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%n 番目のデジタルピンを %m.digital_pin_mode として %m.pin_state にする",
9 | "digital_pin_mode_ja",
10 | "1",
11 | "入力",
12 | "有効"
13 | ],
14 | [
15 | " ",
16 | "%n 番目のアナログピンを入力として %m.pin_state にする",
17 | "analog_pin_mode_ja",
18 | "1",
19 | "有効"
20 | ],
21 | [
22 | "",
23 | "%n 番目のデジタルピンを %m.high_low に設定する",
24 | "digital_write",
25 | "1",
26 | 0
27 | ],
28 | [
29 | "",
30 | "%n 番目のPWMピンに %n と言う値を書き込む",
31 | "analog_write",
32 | "1",
33 | "10"
34 | ],
35 | [
36 | "",
37 | "%n 番目のピンに次の音を鳴らす、周波数: %n ハーツ、長さ: %n ミリ秒",
38 | "play_tone",
39 | "1",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "%n 番目のピンで音を止める",
46 | "tone_off",
47 | "1"
48 | ],
49 | [
50 | "",
51 | "%n 番目のピンのサーボモーターを %n 度で回す",
52 | "set_servo_position",
53 | "1",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "%n 番目のデジタルピンの状態",
59 | "digital_read",
60 | "1"
61 | ],
62 | [
63 | "r",
64 | "%n 番目のアナログピンの値",
65 | "analog_read",
66 | "1"
67 | ],
68 | [
69 | "",
70 | "デバッガーを %m.off_on",
71 | "debugger",
72 | "止める"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "有効",
78 | "無効"
79 | ],
80 | "digital_pin_mode": [
81 | "入力",
82 | "出力",
83 | "PWM波",
84 | "サーボモーターの回転",
85 | "音声出力",
86 | "超音波の距離測定"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "止める",
94 | "動かす"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_ja2.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "デジタルピン %n を %m.digital_pin_mode に %m.pin_state",
9 | "digital_pin_mode_ja",
10 | "1",
11 | "入力",
12 | "使う"
13 | ],
14 | [
15 | " ",
16 | "アナログピン %n を入力に %m.pin_state",
17 | "analog_pin_mode_ja",
18 | "1",
19 | "使う"
20 | ],
21 | [
22 | "",
23 | "デジタルピン %n を %m.high_low にする",
24 | "digital_write",
25 | "1",
26 | 0
27 | ],
28 | [
29 | "",
30 | "PWMピン %n を値 %n にする",
31 | "analog_write",
32 | "1",
33 | "10"
34 | ],
35 | [
36 | "",
37 | "ピン %n の音を鳴らす: %n Hz, %n ミリ秒",
38 | "play_tone",
39 | "1",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "ピン %n の音を止める",
46 | "tone_off",
47 | "1"
48 | ],
49 | [
50 | "",
51 | "ピン %n のサーボを %n 度にする",
52 | "set_servo_position",
53 | "1",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "デジタルピン %n の状態",
59 | "digital_read",
60 | "1"
61 | ],
62 | [
63 | "r",
64 | "アナログピン %n の値",
65 | "analog_read",
66 | "1"
67 | ],
68 | [
69 | "",
70 | "デバッガーを %m.off_on",
71 | "debugger",
72 | "止める"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "使う",
78 | "使わない"
79 | ],
80 | "digital_pin_mode": [
81 | "入力",
82 | "出力",
83 | "PWM",
84 | "サーボ",
85 | "音",
86 | "ソナー"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "止める",
94 | "動かす"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_ko.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "스크래치2&아두이노",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state : 디지털 %n 번핀 / %m.digital_pin_mode 모드",
9 | "digital_pin_mode",
10 | "사용",
11 | "0",
12 | "입력"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state : 아날로그 %n 번핀",
17 | "analog_pin_mode",
18 | "사용",
19 | "0"
20 | ],
21 | [
22 | "",
23 | "디지털 %n 번핀에 %m.high_low 보내기",
24 | "digital_write",
25 | "0",
26 | "0"
27 | ],
28 | [
29 | "",
30 | "디지털(전류조절) %n 번핀에 %n 보내기",
31 | "analog_write",
32 | "0",
33 | "0"
34 | ],
35 | [
36 | "",
37 | "신호음 %n 번핀에서 %n 주파수로 %n 동안 재생하기",
38 | "play_tone",
39 | "0",
40 | "HZ",
41 | "ms"
42 | ],
43 | [
44 | "",
45 | "%n 번핀의 신호음 끄기",
46 | "tone_off",
47 | "0"
48 | ],
49 | [
50 | "",
51 | "서보모터 %n 번핀을 %n ° 만큼 회전시키기",
52 | "set_servo_position",
53 | "0",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "디지털 %n 번핀 값 읽어오기",
59 | "digital_read",
60 | "0"
61 | ],
62 | [
63 | "r",
64 | "아날로그 %n 번핀 값 읽어보기",
65 | "analog_read",
66 | "0"
67 | ],
68 | [
69 | "",
70 | "디버거 %m.off_on",
71 | "debugger",
72 | "끄기"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "사용",
78 | "미사용"
79 | ],
80 | "digital_pin_mode": [
81 | "입력",
82 | "출력",
83 | "전류조절",
84 | "서보모터",
85 | "신호음",
86 | "음파탐지"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "끄기",
94 | "켜기"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_zh_cn.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch to Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | " 设置 %m.pin_state : 数字引脚 %n 为 %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "允许",
11 | "引脚号",
12 | "输入"
13 | ],
14 | [
15 | " ",
16 | "设置 %m.pin_state : 模拟引脚(A) %n 为 输入",
17 | "analog_pin_mode",
18 | "允许",
19 | "引脚号"
20 | ],
21 | [
22 | "",
23 | "数字脚输出: 设置引脚 %n 为 %m.high_low",
24 | "digital_write",
25 | "引脚号",
26 | 0
27 | ],
28 | [
29 | "",
30 | "模拟输出 (PWM): 设置引脚 %n 的值为 %n",
31 | "analog_write",
32 | "引脚号",
33 | "数量值"
34 | ],
35 | [
36 | "",
37 | "在引脚 %n 演奏 ,频率为: %n Hz ,时长为 : %n ms",
38 | "play_tone",
39 | "引脚号",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "关闭引脚 %n 的音调",
46 | "tone_off",
47 | "引脚号"
48 | ],
49 | [
50 | "",
51 | "设置第 %n 脚为舵机输出 转动角度为 %n",
52 | "set_servo_position",
53 | "引脚号",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "读取数字脚 %n 的值",
59 | "digital_read",
60 | "引脚号"
61 | ],
62 | [
63 | "r",
64 | "读取模拟脚(A) %n 的值",
65 | "analog_read",
66 | "引脚号"
67 | ],
68 | [
69 | "",
70 | "调试 %m.off_on",
71 | "debugger",
72 | "关"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "允许",
78 | "禁止"
79 | ],
80 | "digital_pin_mode": [
81 | "输入",
82 | "输出",
83 | "PWM",
84 | "舵机",
85 | "音调",
86 | "超声波"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "关",
94 | "开"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ExtensionDescriptors/s2a_fm_zh_tw.s2e:
--------------------------------------------------------------------------------
1 | {
2 | "extensionName": "s2a_fm - Scratch to Arduino",
3 | "extensionPort": 50209,
4 | "url": "https://github.com/MrYsLab/PyMata",
5 | "blockSpecs": [
6 | [
7 | " ",
8 | "%m.pin_state : 數位腳位 %n 為 %m.digital_pin_mode",
9 | "digital_pin_mode",
10 | "啟用",
11 | "號碼",
12 | "輸入"
13 | ],
14 | [
15 | " ",
16 | "%m.pin_state : 類比腳位(A) %n 為 輸入",
17 | "analog_pin_mode",
18 | "啟用",
19 | "號碼"
20 | ],
21 | [
22 | "",
23 | "數位輸出: 設定腳位 %n 為 %m.high_low",
24 | "digital_write",
25 | "號碼",
26 | 0
27 | ],
28 | [
29 | "",
30 | "模擬類比輸出(PWM): 設定腳位 %n 的值為 %n",
31 | "analog_write",
32 | "號碼",
33 | "數量值"
34 | ],
35 | [
36 | "",
37 | "在腳位 %n 播放音調, 頻率為: %n Hz, 時間為: %n ms",
38 | "play_tone",
39 | "號碼",
40 | 1000,
41 | 500
42 | ],
43 | [
44 | "",
45 | "關閉腳位 %n 的音調",
46 | "tone_off",
47 | "號碼"
48 | ],
49 | [
50 | "",
51 | "設定第 %n 腳位為伺服機輸出 轉動角度為 %n",
52 | "set_servo_position",
53 | "號碼",
54 | 90
55 | ],
56 | [
57 | "r",
58 | "讀取數位腳位 %n 的值",
59 | "digital_read",
60 | "號碼"
61 | ],
62 | [
63 | "r",
64 | "讀取類比腳位(A) %n 的值",
65 | "analog_read",
66 | "號碼"
67 | ],
68 | [
69 | "",
70 | "除錯工具 %m.off_on",
71 | "debugger",
72 | "關"
73 | ]
74 | ],
75 | "menus": {
76 | "pin_state": [
77 | "啟用",
78 | "停用"
79 | ],
80 | "digital_pin_mode": [
81 | "輸入",
82 | "輸出",
83 | "PWM",
84 | "伺服機",
85 | "音調",
86 | "超音波"
87 | ],
88 | "high_low": [
89 | "0",
90 | "1"
91 | ],
92 | "off_on": [
93 | "關",
94 | "開"
95 | ]
96 | }
97 | }
98 |
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/P4K_Extension.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/P4K_Extension.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/Turn On LED On Pin 6.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/Turn On LED On Pin 6.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_DE.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_DE.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_Es.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_Es.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_Fr.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_Fr.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_GR.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_GR.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_It.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_It.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_Pt.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_Pt.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_ja.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_ja.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_ko.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_ko.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_nl.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_nl.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_zh_cn.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_zh_cn.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/s2a_fm_base_zh_tw.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/s2a_fm_base_zh_tw.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/sonarTest.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/sonarTest.sb2
--------------------------------------------------------------------------------
/ScratchFiles/ScratchProjects/spinning_cat.sb2:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/MrYsLab/s2a_fm/4a00749da24dae9152698c872a4f30d9a25cc214/ScratchFiles/ScratchProjects/spinning_cat.sb2
--------------------------------------------------------------------------------
/Snap!Files/Español/blink.xml:
--------------------------------------------------------------------------------
1 | data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAKAAAAB4CAYAAAB1ovlvAAABjElEQVR4nO3SsY2DAAAEQXcDERRCQp0EFAWF8NmLxHb0WomfkS6/YF8XhF71Af43AZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZIS4BvjOF7bttU3Hk+AH6zr+rtpmq7jOOpLjyPAL+4R3rcsS33tEQT4hQD/lgA/uAc3z/N1nmd96XEE+MYwDNe+7/WNxxMgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiApAZISICkBkhIgKQGSEiCpH6qOr8jKQ12nAAAAAElFTkSuQmCCdata:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAeAAAAFoCAYAAACPNyggAAACtUlEQVR4nO3BMQEAAADCoPVPbQwfoAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA+Bo3+AAF/RMkcAAAAAElFTkSuQmCC
1
data
mapmany1
data lists
1
1
1
cont
cont