2 |
Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation
3 |

4 |

5 |

6 |

7 |
8 |
9 | 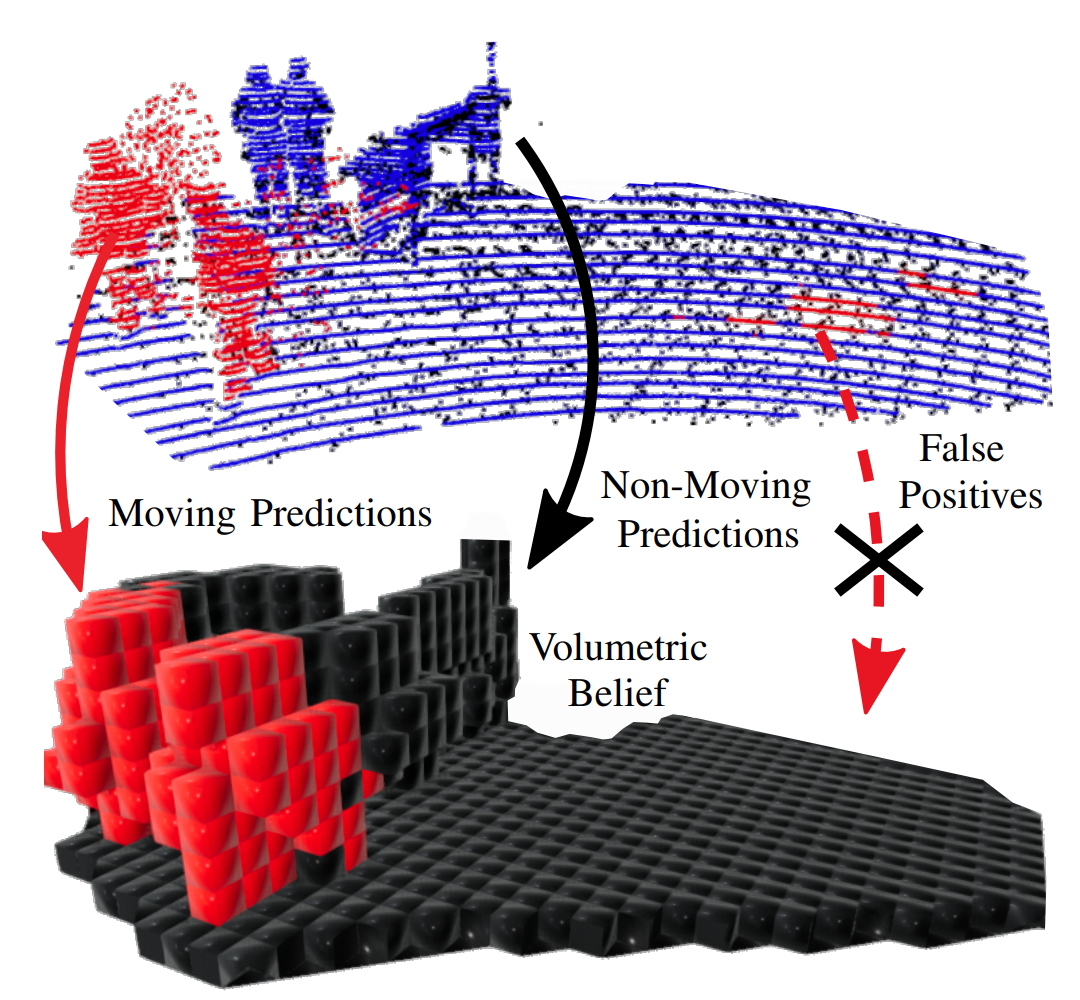 10 |
10 |
11 |
12 |
13 | Our approach identifies moving objects in the current scan (blue points) and the local map (black points) of the environment and maintains a volumetric belief map representing the dynamic environment.
14 |
15 |
16 |
17 | Click here for qualitative results!
18 |
19 | [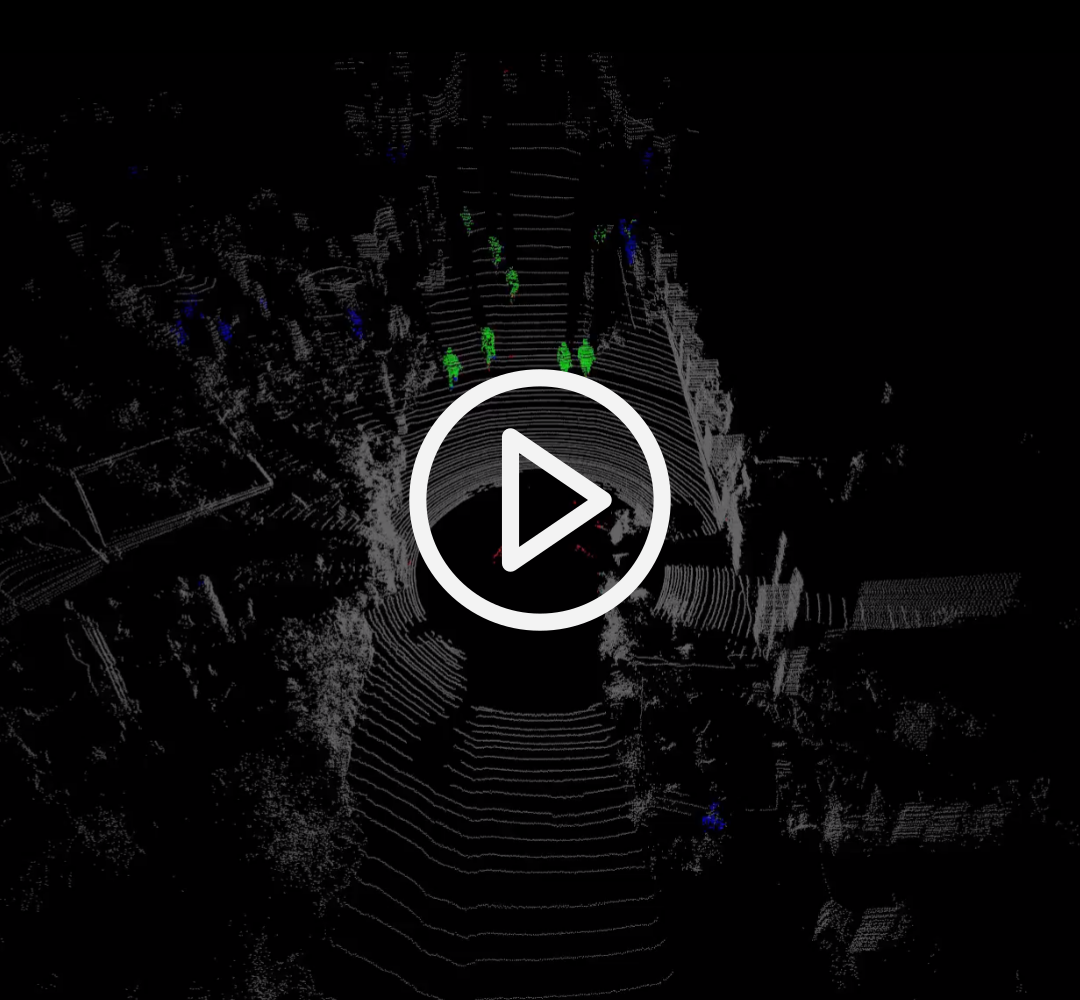](https://github.com/PRBonn/MapMOS/assets/38326482/04c7e5a2-dd44-431a-95b0-c42d5605078a)
20 |
21 | Our predictions for the KITTI Tracking sequence 19 with true positives (green), false positives (red), and false negatives (blue).
22 |
23 |
24 |
25 |
26 |