├── .readme
├── figure3.png
├── husky_test.gif
├── husky_test_nav.gif
├── motivation.png
├── motivation_old.png
├── vs_em.png
├── vs_graph.png
└── vs_poster.png
├── CMakeLists.txt
├── LICENSE
├── README.md
├── include
├── agribot_types.h
├── agribot_vs.h
└── agribot_vs_nodehandler.h
├── launch
├── camera_umd.launch
└── visualservoing.launch
├── msg
└── vs_msg.msg
├── package.xml
├── params
└── agribot_vs_run.yaml
└── src
├── agribot_vs.cpp
├── agribot_vs_node.cpp
└── agribot_vs_nodehandler.cpp
/.readme/figure3.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/figure3.png
--------------------------------------------------------------------------------
/.readme/husky_test.gif:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/husky_test.gif
--------------------------------------------------------------------------------
/.readme/husky_test_nav.gif:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/husky_test_nav.gif
--------------------------------------------------------------------------------
/.readme/motivation.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/motivation.png
--------------------------------------------------------------------------------
/.readme/motivation_old.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/motivation_old.png
--------------------------------------------------------------------------------
/.readme/vs_em.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/vs_em.png
--------------------------------------------------------------------------------
/.readme/vs_graph.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/vs_graph.png
--------------------------------------------------------------------------------
/.readme/vs_poster.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/PRBonn/visual-crop-row-navigation/6ddfa6cc183c4d21eda64abe2003291ecffeb4f3/.readme/vs_poster.png
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 2.8.3)
2 | project(visual_crop_row_navigation)
3 |
4 | # c++11
5 | set(CMAKE_CXX_FLAGS "-std=c++11 ${CMAKE_CXX_FLAGS}")
6 |
7 | find_package(catkin REQUIRED COMPONENTS
8 | roscpp
9 | genmsg
10 | cmake_modules
11 | message_generation
12 | dynamic_reconfigure
13 | std_msgs
14 | cv_bridge
15 | sensor_msgs
16 | image_transport
17 | )
18 |
19 | find_package( PkgConfig )
20 | find_package( OpenCV REQUIRED )
21 |
22 | add_message_files(FILES vs_msg.msg)
23 |
24 | generate_messages(DEPENDENCIES std_msgs)
25 |
26 | set (CMAKE_CXX_STANDARD 11)
27 | if(NOT CMAKE_BUILD_TYPE)
28 | set(CMAKE_BUILD_TYPE Release)
29 | endif()
30 | set(CMAKE_CXX_FLAGS "-Wall -Wextra -fPIC")
31 | set(CMAKE_CXX_FLAGS_DEBUG "-g")
32 | set(CMAKE_CXX_FLAGS_RELEASE "-O3")
33 |
34 | find_package (Eigen3 3.3 REQUIRED NO_MODULE)
35 | pkg_check_modules( EIGEN3 REQUIRED eigen3 )
36 |
37 | include_directories(
38 | include
39 | ${catkin_INCLUDE_DIRS}
40 | ${EIGEN3_INCLUDE_DIRS}
41 | )
42 |
43 | catkin_package(
44 | INCLUDE_DIRS
45 | include
46 | LIBRARIES
47 | ${PROJECT_NAME}_core
48 | CATKIN_DEPENDS
49 | sensor_msgs
50 | std_msgs
51 | message_runtime
52 | )
53 |
54 | ## Declare a cpp library
55 | add_library(${PROJECT_NAME}_core
56 | src/agribot_vs.cpp
57 | )
58 |
59 | ## Declare cpp executables
60 | add_executable(agribot_vs_node
61 | src/agribot_vs_node.cpp
62 | src/agribot_vs_nodehandler.cpp
63 | )
64 |
65 | target_link_libraries(agribot_vs_node
66 | ${PROJECT_NAME}_core
67 | ${catkin_LIBRARIES}
68 | ${OpenCV_LIBS}
69 | Eigen3::Eigen
70 | )
71 |
72 | add_dependencies(agribot_vs_node ${${PROJECT_NAME}_EXPORTED_TARGETS})
73 | add_dependencies(${PROJECT_NAME}_core ${${PROJECT_NAME}_EXPORTED_TARGETS})
74 |
75 |
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2019 Photogrammetry & Robotics Bonn
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
22 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # Visual Crop Row Navigation
2 |
3 |
4 |

5 |
13 |
14 | [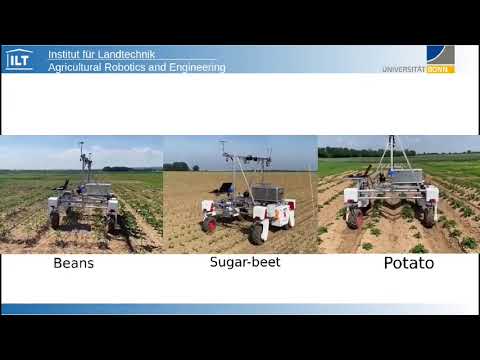](https://www.youtube.com/watch?v=z2Cb2FFZ2aU)
15 |
16 |
17 |
18 | This is a visual-servoing based robot navigation framework tailored for navigating in row-crop fields.
19 | It uses the images from two on-board cameras and exploits the regular crop-row structure present in the fields for navigation, without performing explicit localization or mapping. It allows the robot to follow the crop-rows accurately and handles the switch to the next row seamlessly within the same framework.
20 |
21 | This implementation uses C++ and ROS and has been tested in different environments both in simulation and in real world and on diverse robotic platforms.
22 |
23 | This work has been developed @ [IPB](http://www.ipb.uni-bonn.de/), University of Bonn.
24 |
25 | Check out the [video1](https://www.youtube.com/watch?v=uO6cgBqKBas), [video2](https://youtu.be/KkCVQAhzS4g) of our robot following this approach to navigate on a test row-crop field.
26 |
27 |
28 |


30 |
33 |
48 |

49 |

50 |
55 |

56 |

57 |