88 |
89 | | Sensor Type |
90 | Download Address |
91 |
92 |
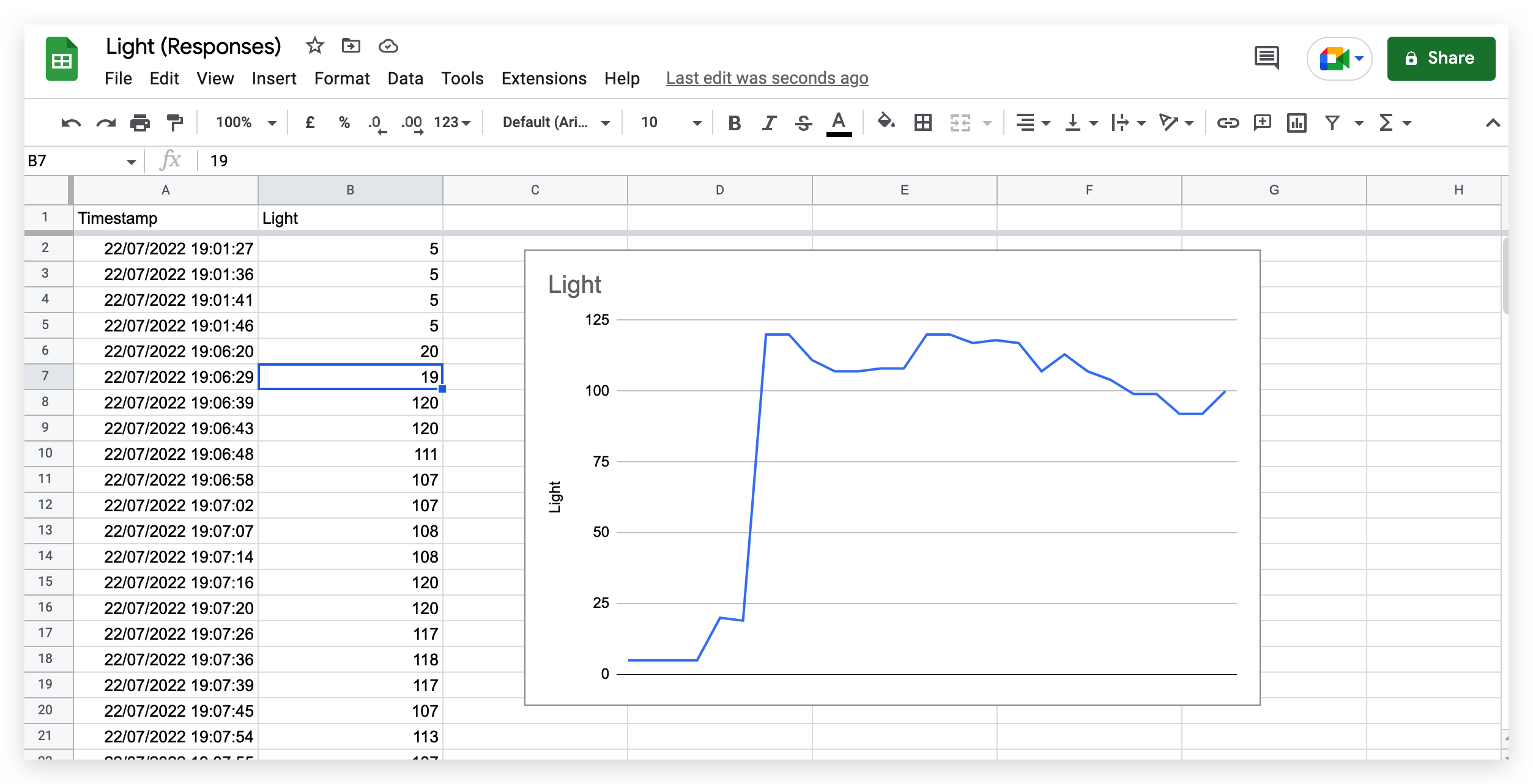
93 | | Wio Terminal built-in light sensor |
94 | Download |
95 |
96 |
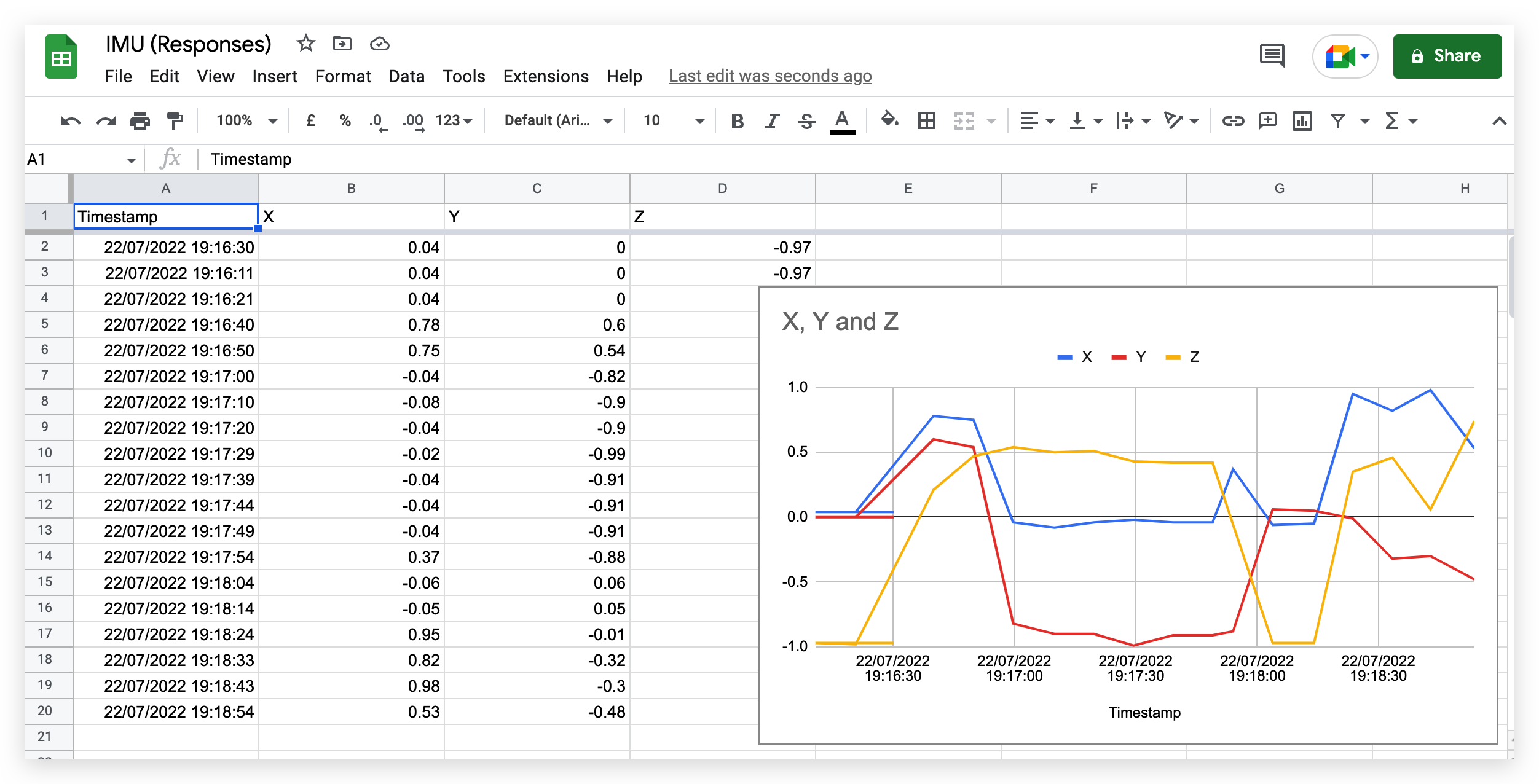
97 | | Wio Terminal built-in IMU sensor |
98 | Download |
99 |
100 |
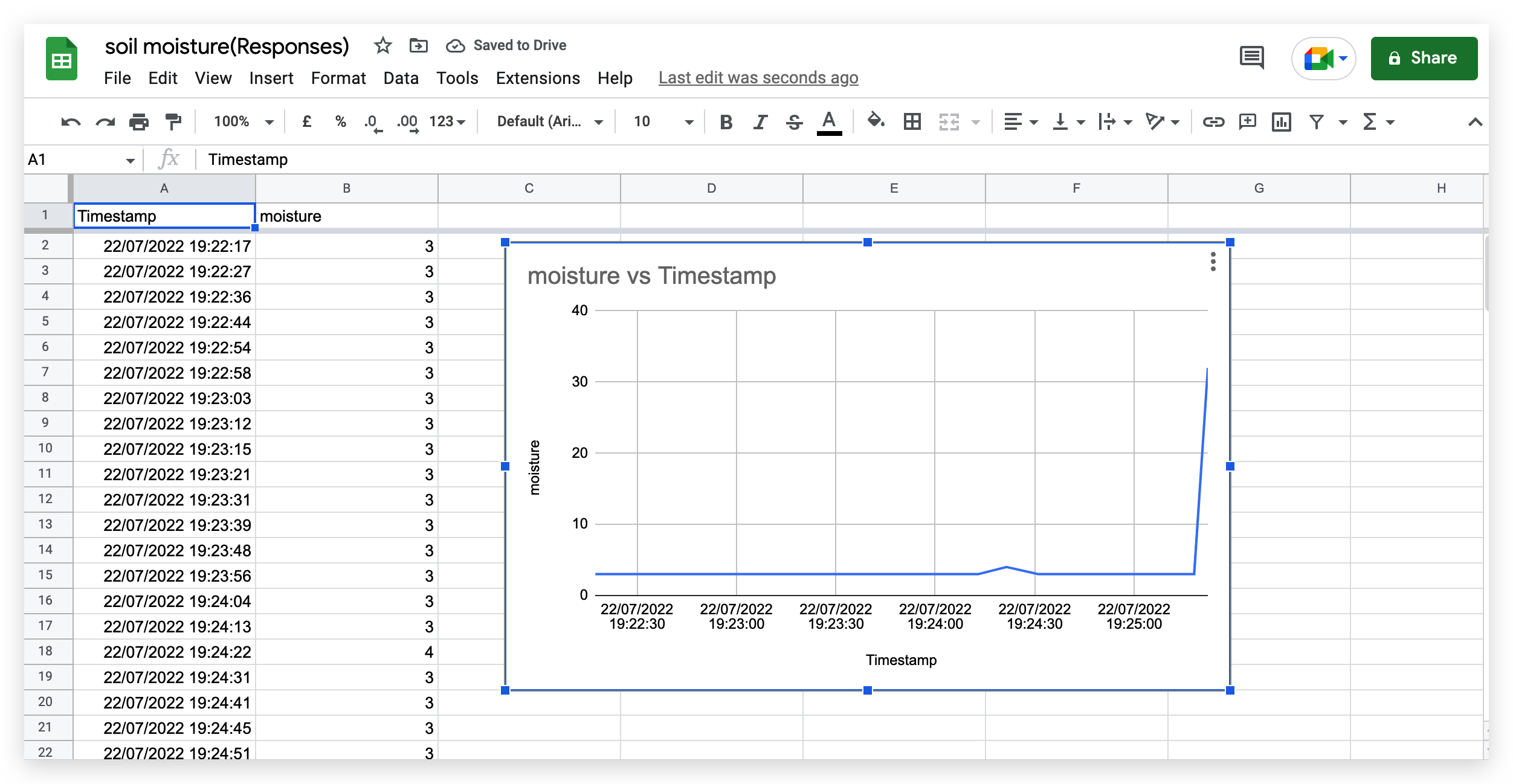
101 | | Soil Moisture Sensor |
102 | Download |
103 |
104 |
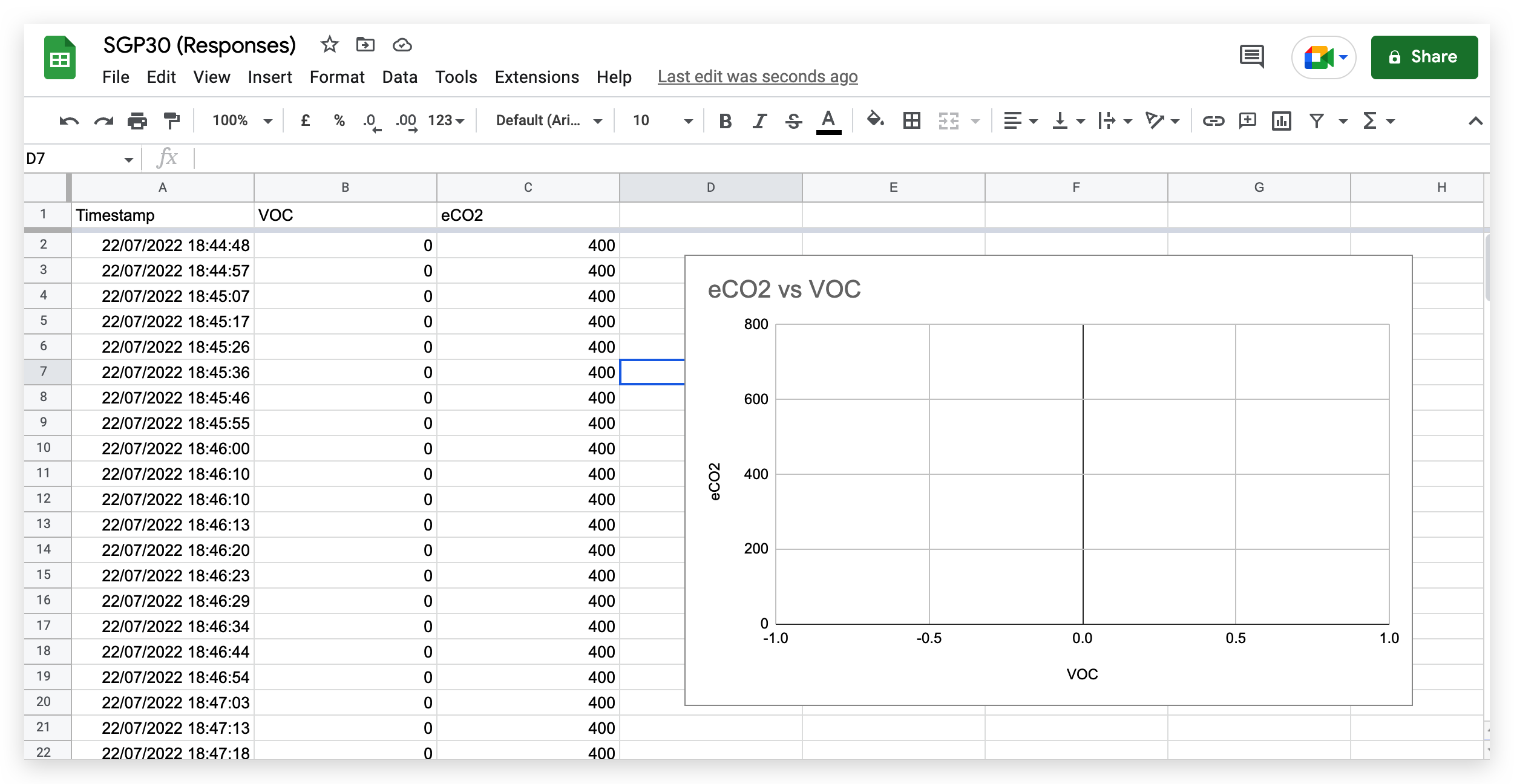
105 | | VOC and eCO2 Gas Sensor (SGP30) |
106 | Download |
107 |
108 |
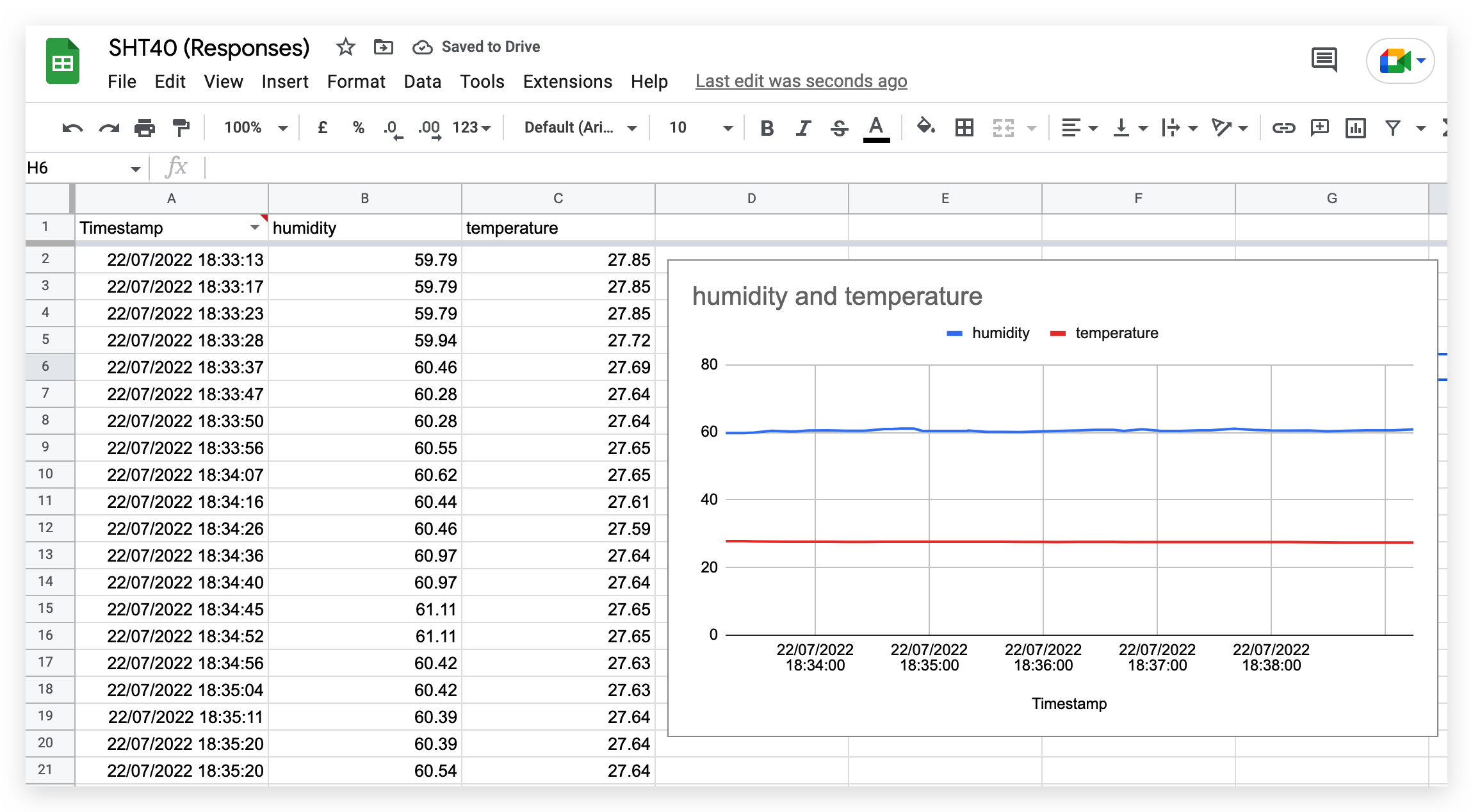
109 | | Temp&Humi Sensor (SHT40) |
110 | Download |
111 |
112 |
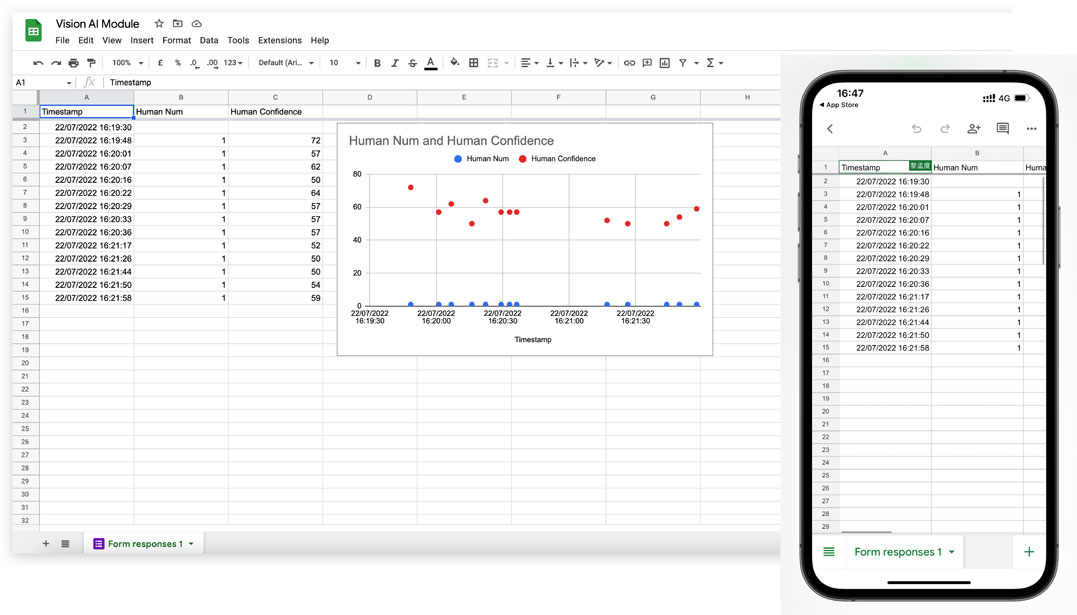
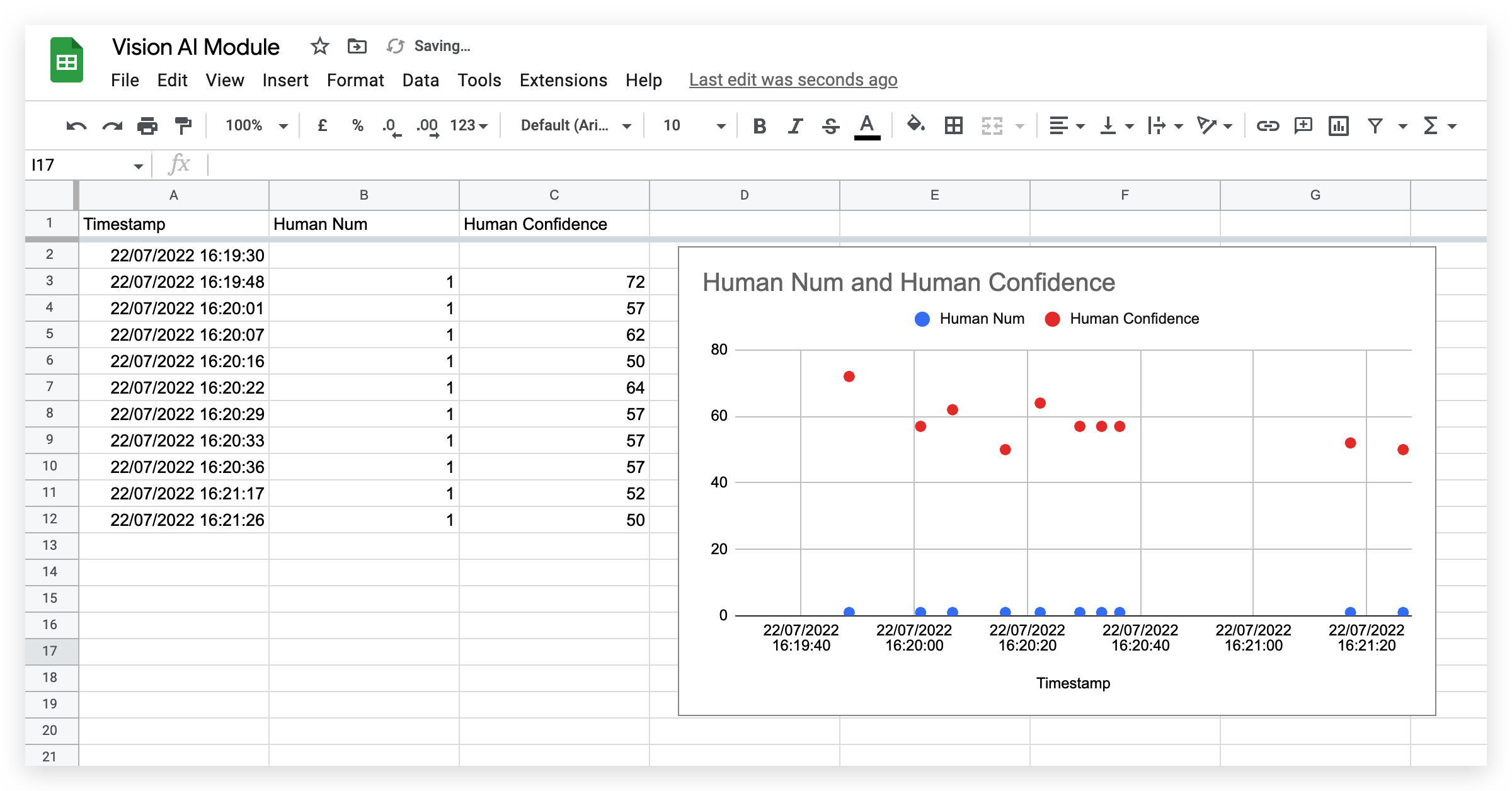
113 | | Vision AI Module |
114 | Download |
115 |
116 |
117 |
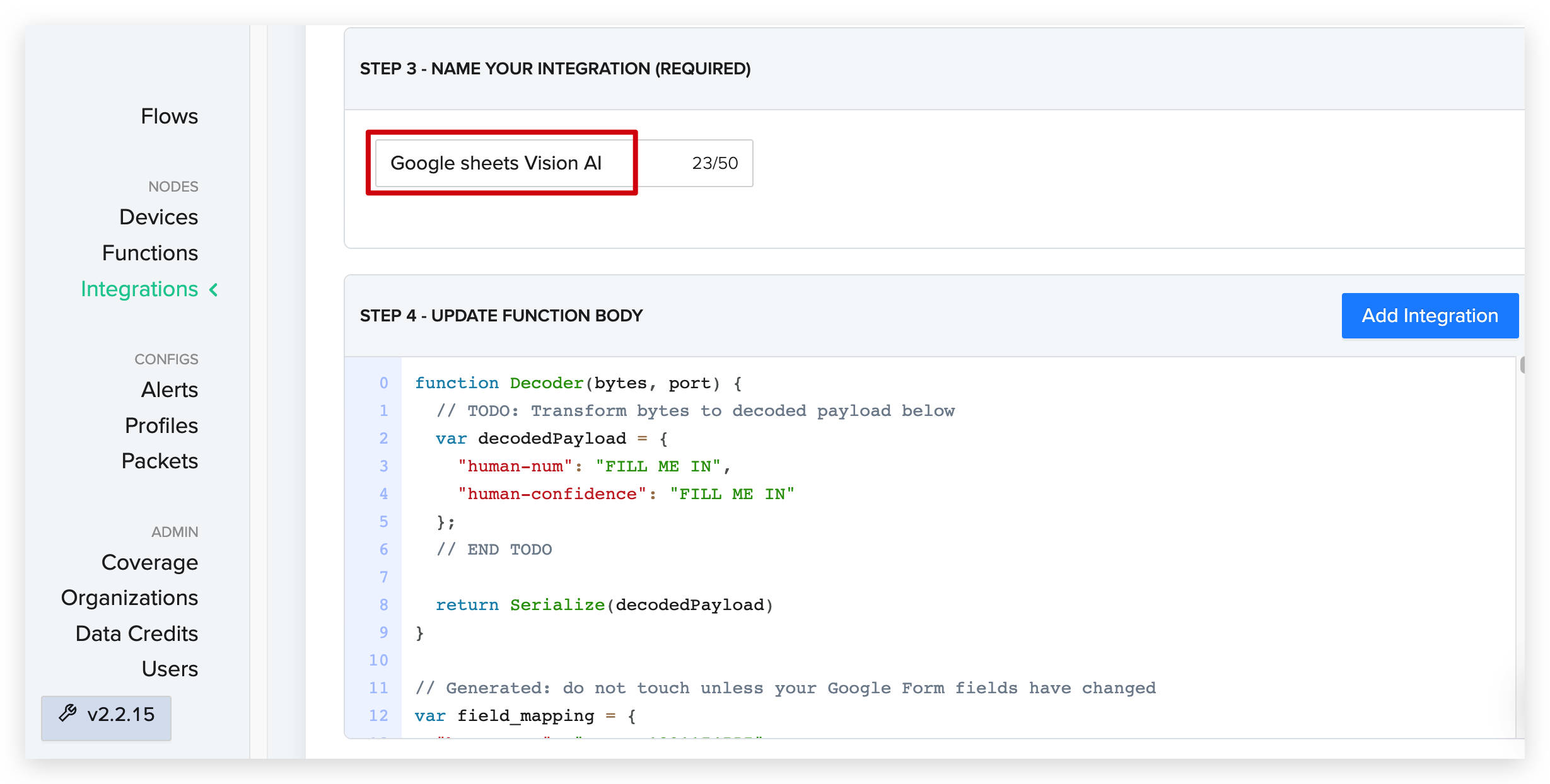
118 | !!!Note
119 | The decoder used by Google Forms cannot be used with the decoder provided in the [Connecting to Helium](https://wiki.seeedstudio.com/Connecting-to-Helium/#write-decoders-function-for-different-sensors).
120 |
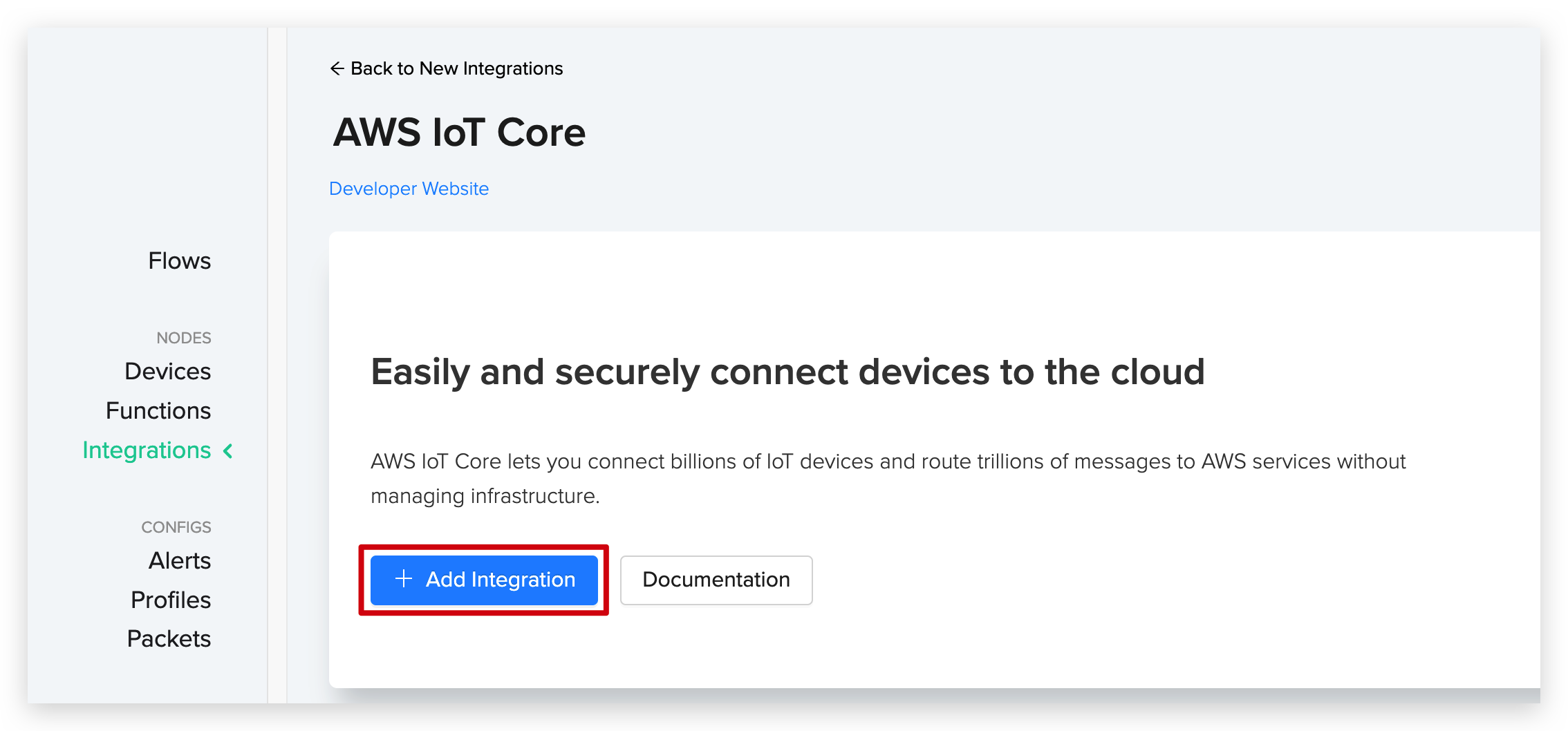
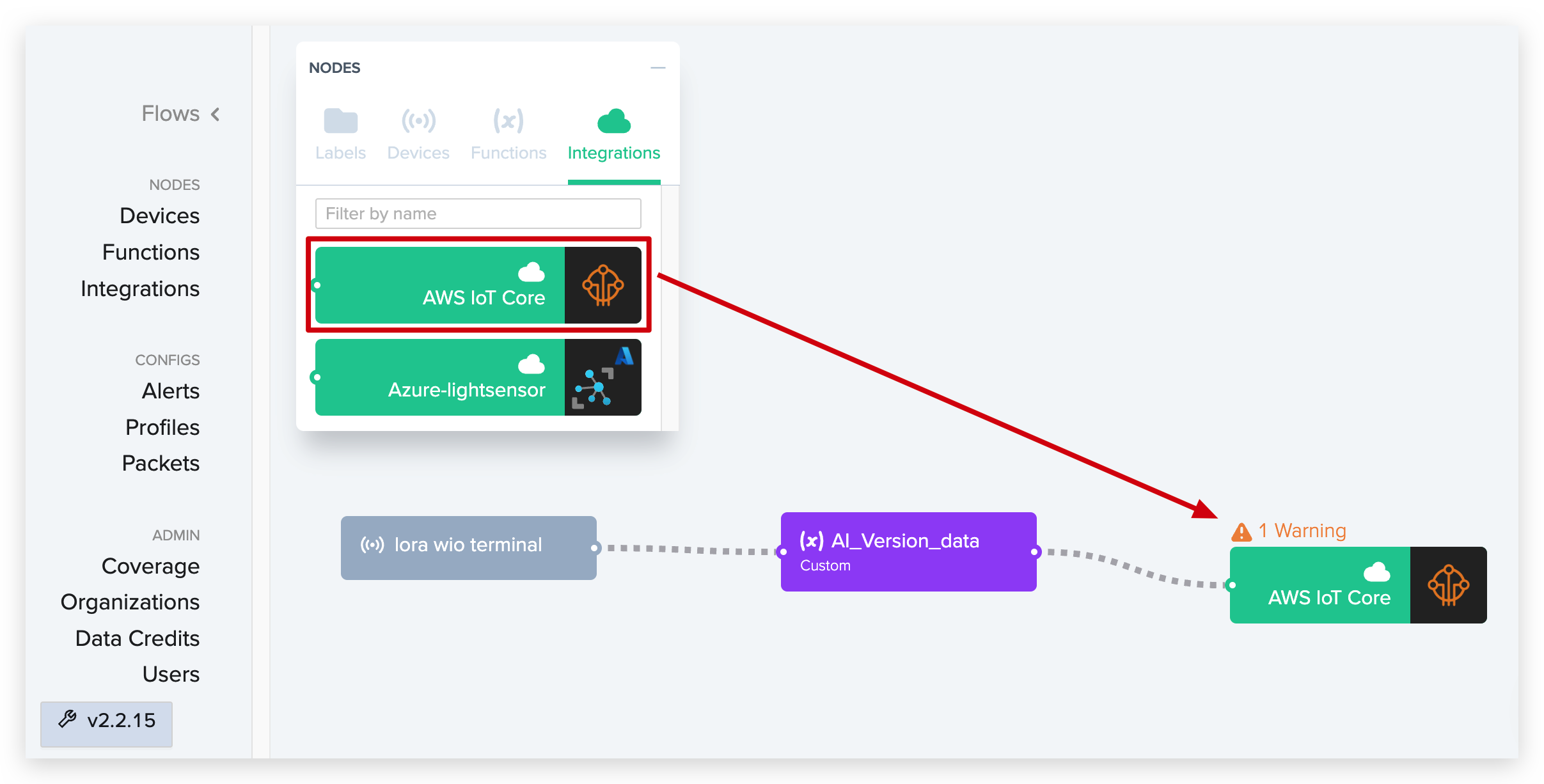
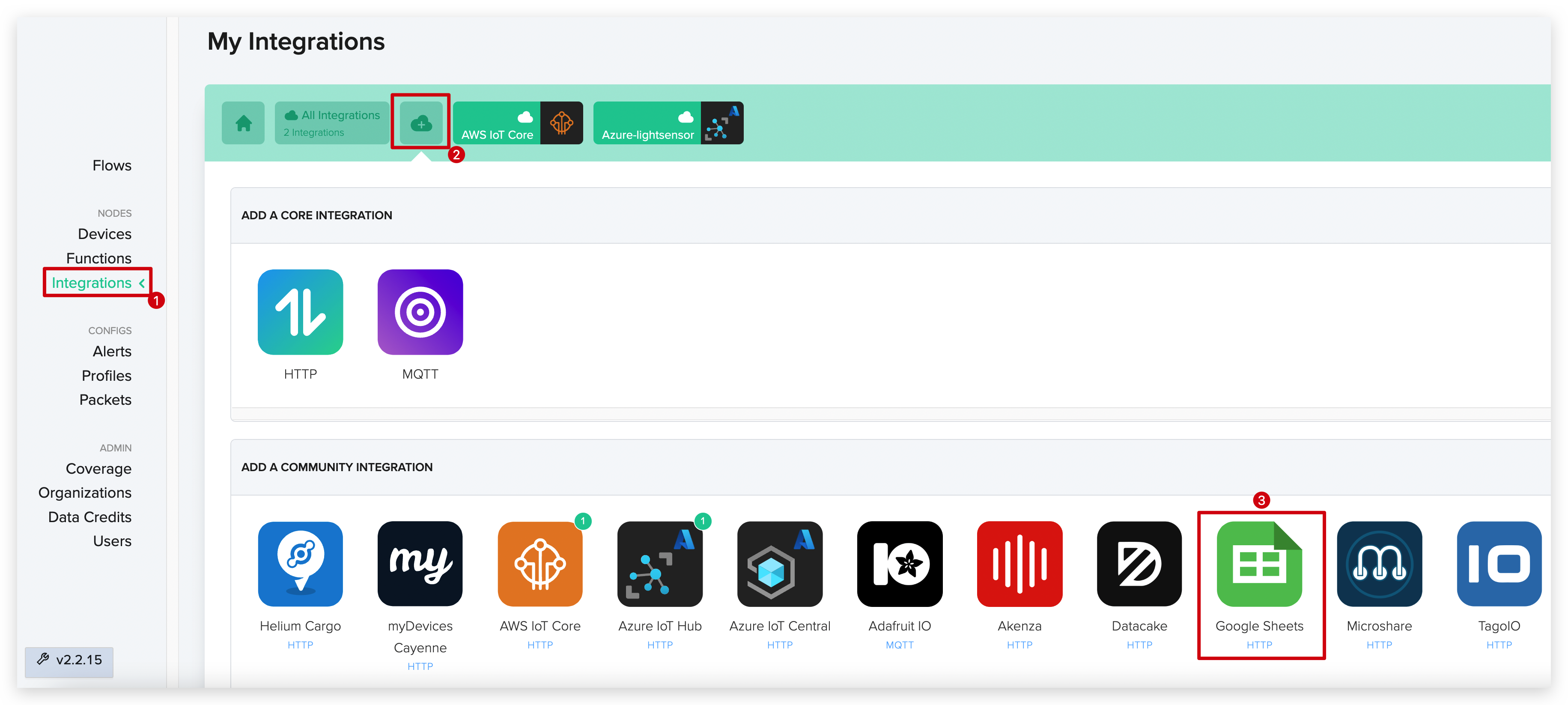
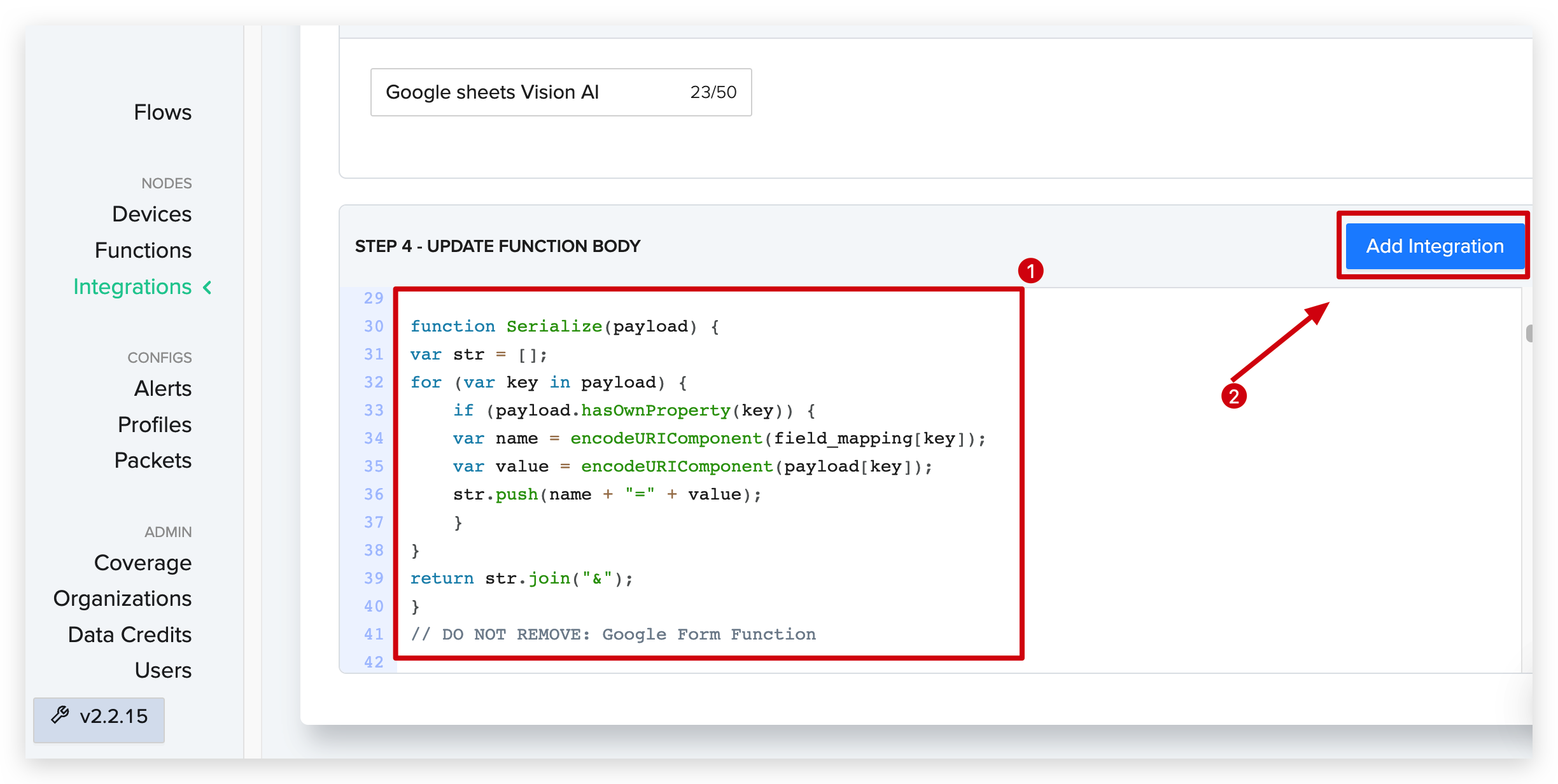
121 | Continuing from the previous step, we need to copy and replace the code area of Helium with the codec of the sensor you are using, and then just click Add Integration on the right hand side.
122 |
123 |