6 |
7 |
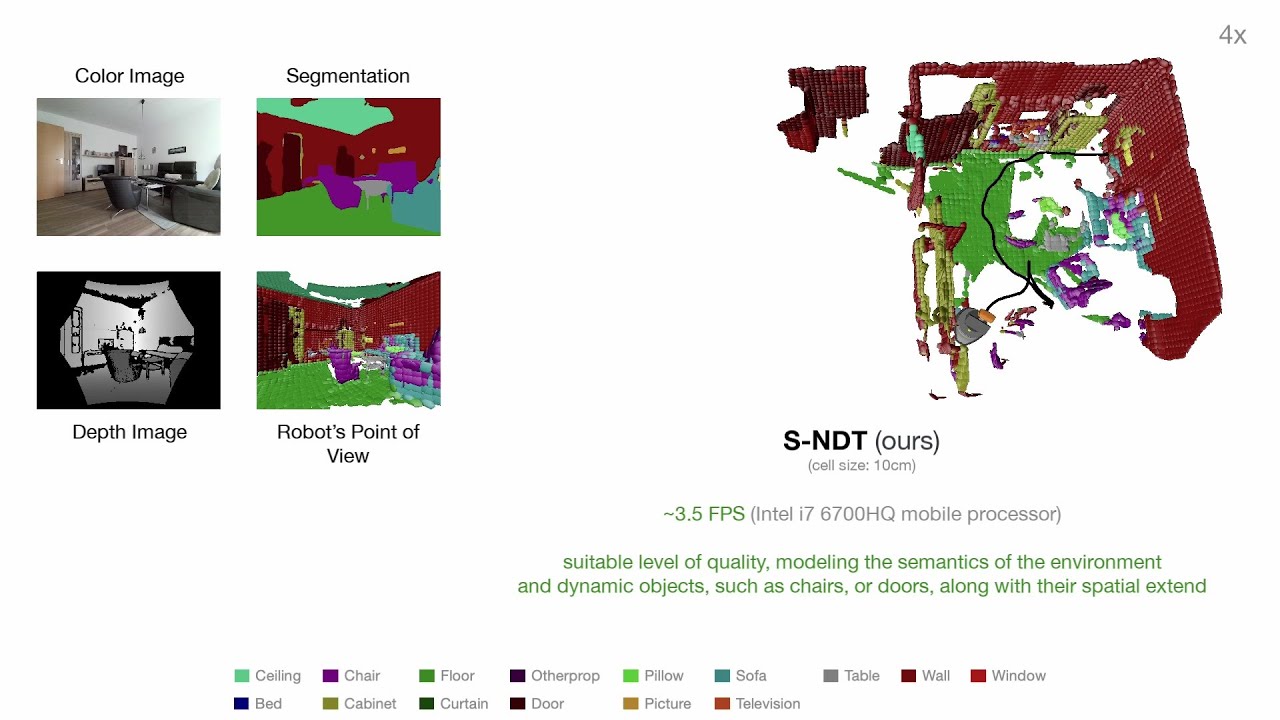
(Click on the image to open YouTube video)
8 |
9 |