├── .gitattributes
├── .travis.yml
├── Figures
├── Algorithm wheel_move.jpg
├── Algorithm.jpg
├── Avon_slipAngle_dataGraph.JPG
├── Car_model_angles.JPG
├── DLC_test_output.png
├── FIgure_38.JPG
├── FSRA16_front.jpeg
├── Figure_34.png
├── Figure_34_noControl.png
├── Figure_38.PNG
├── Figure_39.PNG
├── Figure_40.PNG
├── Figure_41_right.PNG
├── Figure_48.PNG
├── Figure_49.PNG
├── Figure_50.PNG
├── Figure_54.PNG
├── Figure_56.png
├── Figure_57_down.PNG
├── Figure_57_up.PNG
├── Figure_58_right.PNG
├── Load_Trasnfer_FSRA16_DLC.JPG
├── Read_Me.md
├── Vehicle_angles_newFont.png
├── Vehicle_angles_preFinal.jpg
└── slip angle.png
├── LICENSE
├── Matlab
├── DoubleLaneChangeTest.m
├── READ_ME.md
├── doubleLaneChange.m
├── generateOrientation.m
├── plotData.m
├── tire_Avon.mat
├── userDefinedTest.m
├── v07.m
├── wheel_move.m
└── wheel_speeds.mat
├── README.md
└── Модел кретања спортског возила са електро погоном на свим точковима Torque Vectoring.pdf
/.gitattributes:
--------------------------------------------------------------------------------
1 | # Auto detect text files and perform LF normalization
2 | * text=auto
3 |
--------------------------------------------------------------------------------
/.travis.yml:
--------------------------------------------------------------------------------
1 | # We pretend to be Java because we need GNU Octave which is not
2 | # available (as of January 2016)
3 | language: java
4 |
5 | ###############################################################################
6 | cache:
7 | # Downloading octave takes a while, so let's cache apt
8 | apt: true
9 | directories:
10 | # Cache octave packages
11 | - $HOME/octave
12 | # Cache other packages
13 | - $HOME/external_cache
14 |
15 | ###############################################################################
16 | env:
17 | matrix:
18 | - COVERAGE="false"
19 | - COVERAGE="true"
20 |
21 | matrix:
22 | allow_failures:
23 | - env: COVERAGE="true"
24 | fast_finish: true
25 |
26 | ###############################################################################
27 | # Command to install dependencies
28 | before_install:
29 | # Remember the directory where our repository to test is located
30 | - REPOPATH="$(pwd)" && pwd
31 | # ---------------------------------------------------------------------------
32 | # Check whether we need to upgrade the gcc and g++ versions. We do need to if
33 | # the version is less the 4.8 and we need to install the image package from
34 | # Octave Forge (possibly for other packages as well).
35 | # For now, lets just always say we do need to do this.
36 | - UPGRADE_GCC="true"
37 | # ---------------------------------------------------------------------------
38 | # Add repository for octave
39 | - travis_retry sudo add-apt-repository -y ppa:octave/stable
40 | # Add repository for installing g++-4.8 on Ubuntu 12.04
41 | - if [ "$UPGRADE_GCC" = "true" ]; then
42 | sudo add-apt-repository -y ppa:ubuntu-toolchain-r/test;
43 | fi
44 | # Update apt-get to include the contents from the new locations
45 | - travis_retry sudo apt-get update -qq
46 | # Install octave with apt-get
47 | - travis_retry sudo apt-get install -y octave liboctave-dev
48 | # Add a C++11 compiler so we can install image package
49 | - if [ "$UPGRADE_GCC" = "true" ]; then
50 | travis_retry sudo apt-get install -y gcc-4.8 g++-4.8;
51 | sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-4.8 50;
52 | sudo update-alternatives --install /usr/bin/g++ g++ /usr/bin/g++-4.8 50;
53 | fi;
54 | # Check which versions of g++ and gcc we are using
55 | - which g++;
56 | g++ --version;
57 | which gcc;
58 | gcc --version;
59 | # ---------------------------------------------------------------------------
60 | # Go up one level and retrieve MOxUnit from its repository
61 | - cd ..;
62 | ls -alh;
63 | # Remove directory if it is already there from previous build
64 | - rm -rf MOxUnit;
65 | - git clone https://github.com/MOxUnit/MOxUnit.git
66 | # Install MOxUnit, which adds itself to the startup path
67 | - make -C MOxUnit install
68 | # Install MOcov, which adds itself to the startup path
69 | - if [ "$COVERAGE" = "true" ]; then
70 | rm -rf MOcov;
71 | git clone https://github.com/MOcov/MOcov.git;
72 | make -C MOcov install;
73 | fi;
74 | # Go back to the repository directory
75 | - cd ${REPOPATH}
76 |
77 | ###############################################################################
78 | install:
79 | # Ensure external packages folder exists and is empty
80 | - rm -rf external;
81 | mkdir -p external;
82 | # Install required packages for Octave
83 | - if [ -f requirements-octave.txt ]; then
84 | mopi/mopi.sh requirements-octave.txt external "$HOME/external_cache";
85 | fi;
86 | # Install other required packages
87 | - if [ -f requirements.txt ]; then
88 | mopi/mopi.sh requirements.txt external "$HOME/external_cache";
89 | fi;
90 | # Install developmental requirements
91 | - if [ -f requirements-dev.txt ]; then
92 | mopi/mopi.sh requirements-dev.txt external "$HOME/external_cache";
93 | fi;
94 | # Before running the tests, we will have to add our package and our
95 | # external dependencies to the octave path
96 | - PACKAGE_FOLDER="package_name";
97 | ADDPATH_COMMAND="addpath(genpath(fullfile(pwd, '$PACKAGE_FOLDER')));";
98 | ADDPATH_COMMAND+=" addpath(genpath(fullfile(pwd, 'external')));";
99 | echo "ADDPATH_COMMAND| $ADDPATH_COMMAND";
100 |
101 | ###############################################################################
102 | before_script:
103 | - TEST_ARGS="'-recursive', '-verbose', '-junit_xml_file', 'testresults.xml'";
104 | if [ "$COVERAGE" = "true" ]; then
105 | TEST_ARGS+=", '-with_coverage', '-cover', '$PACKAGE_FOLDER'";
106 | TEST_ARGS+=", '-cover_exclude', 'tests'";
107 | TEST_ARGS+=", '-cover_xml_file', 'coverage.xml'";
108 | TEST_ARGS+=", '-cover_json_file', 'coveralls.json'";
109 | fi;
110 | TEST_COMMAND="exit(~moxunit_runtests('tests', $TEST_ARGS));";
111 | echo "TEST_COMMAND| $TEST_COMMAND";
112 | # Double-check we are still in the right directory
113 | - pwd
114 | # Check what octave packages we have installed
115 | -octave -q --eval "ver"
116 | # ---------------------------------------------------------------------------
117 | # Remove any cached results files from previous build, if present
118 | - rm -f testresults.xml;
119 | rm -f coverage.xml;
120 | rm -f .coverage;
121 | rm -f coveralls.json;
122 | # ---------------------------------------------------------------------------
123 | # Set up folders for test results on Shippable
124 | - if [ "$SHIPPABLE" = "true" ]; then
125 | rm -fr shippable;
126 | mkdir -p shippable/testresults;
127 | mkdir -p shippable/codecoverage;
128 | fi;
129 |
130 | ###############################################################################
131 | script:
132 | - octave -q --eval "$ADDPATH_COMMAND $TEST_COMMAND";
133 |
134 | ###############################################################################
135 | after_script:
136 | # Check where we ended up and what's going on where we are
137 | - pwd
138 | - ls -alh
139 | # ---------------------------------------------------------------------------
140 | # Move results and coverage files into appropriate places
141 | - if [ "$SHIPPABLE" = "true" ] && [ -f testresults.xml ]; then
142 | mv testresults.xml shippable/testresults/;
143 | fi;
144 | if [ "$SHIPPABLE" = "true" ] && [ -f coverage.xml ]; then
145 | cp coverage.xml shippable/codecoverage/;
146 | fi;
147 |
148 | ###############################################################################
149 | after_success:
150 | # Only run coveralls on Travis. When running on a public Travis-CI, the
151 | # repo token is automatically inferred, but to run coveralls on Shippable
152 | # the repo token needs to be specified in a .coveralls.yml or as an
153 | # environment variable COVERALLS_REPO_TOKEN. This should be kept hidden
154 | # from public viewing, either by encrypting the token or running on a
155 | # private build.
156 | # We ignore coverage push failures because the servers are not 100%
157 | # reliable and we don't want the CI to report a failure just because the
158 | # coverage report wasn't published.
159 | # For Codecov, we use this https://github.com/codecov/codecov-bash
160 | - if [ "$COVERAGE" = "true" ] && [ "$TRAVIS" = "true" ] && [ "$SHIPPABLE" != "true" ]; then
161 | curl --verbose -F json_file=@`pwd`/coveralls.json https://coveralls.io/api/v1/jobs || echo "Coveralls push failed";
162 | bash <(curl -s https://codecov.io/bash) || echo "Codecov push failed";
163 | fi;
164 |
165 | ###############################################################################
166 | # Enable archiving of artifacts on Shippable (does nothing on Travis)
167 | archive: true
168 |
--------------------------------------------------------------------------------
/Figures/Algorithm wheel_move.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Algorithm wheel_move.jpg
--------------------------------------------------------------------------------
/Figures/Algorithm.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Algorithm.jpg
--------------------------------------------------------------------------------
/Figures/Avon_slipAngle_dataGraph.JPG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Avon_slipAngle_dataGraph.JPG
--------------------------------------------------------------------------------
/Figures/Car_model_angles.JPG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Car_model_angles.JPG
--------------------------------------------------------------------------------
/Figures/DLC_test_output.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/DLC_test_output.png
--------------------------------------------------------------------------------
/Figures/FIgure_38.JPG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/FIgure_38.JPG
--------------------------------------------------------------------------------
/Figures/FSRA16_front.jpeg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/FSRA16_front.jpeg
--------------------------------------------------------------------------------
/Figures/Figure_34.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_34.png
--------------------------------------------------------------------------------
/Figures/Figure_34_noControl.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_34_noControl.png
--------------------------------------------------------------------------------
/Figures/Figure_38.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_38.PNG
--------------------------------------------------------------------------------
/Figures/Figure_39.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_39.PNG
--------------------------------------------------------------------------------
/Figures/Figure_40.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_40.PNG
--------------------------------------------------------------------------------
/Figures/Figure_41_right.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_41_right.PNG
--------------------------------------------------------------------------------
/Figures/Figure_48.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_48.PNG
--------------------------------------------------------------------------------
/Figures/Figure_49.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_49.PNG
--------------------------------------------------------------------------------
/Figures/Figure_50.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_50.PNG
--------------------------------------------------------------------------------
/Figures/Figure_54.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_54.PNG
--------------------------------------------------------------------------------
/Figures/Figure_56.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_56.png
--------------------------------------------------------------------------------
/Figures/Figure_57_down.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_57_down.PNG
--------------------------------------------------------------------------------
/Figures/Figure_57_up.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_57_up.PNG
--------------------------------------------------------------------------------
/Figures/Figure_58_right.PNG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Figure_58_right.PNG
--------------------------------------------------------------------------------
/Figures/Load_Trasnfer_FSRA16_DLC.JPG:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Load_Trasnfer_FSRA16_DLC.JPG
--------------------------------------------------------------------------------
/Figures/Read_Me.md:
--------------------------------------------------------------------------------
1 | #Figures
2 |
3 | In this folder are placed figures as snapshots of simulation outpus
4 |
--------------------------------------------------------------------------------
/Figures/Vehicle_angles_newFont.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Vehicle_angles_newFont.png
--------------------------------------------------------------------------------
/Figures/Vehicle_angles_preFinal.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/Vehicle_angles_preFinal.jpg
--------------------------------------------------------------------------------
/Figures/slip angle.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Figures/slip angle.png
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2018 Tepic
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
--------------------------------------------------------------------------------
/Matlab/DoubleLaneChangeTest.m:
--------------------------------------------------------------------------------
1 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
2 | %
3 | % Copyright (c) *
4 | % All rights reserved by Milan Tepic
5 | %
6 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
7 | %
8 | % Filename: DoubleLaneChangeTest.m
9 | %
10 | %
11 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
12 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
13 | %
14 | %
15 | % DESCRIPTION
16 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
17 | %
18 | % A test programe before final doubleLaneChange function is developed according to this *main* program of single predefined double lane change
19 | %
20 | %
21 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
22 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
23 | %
24 | %
25 | % HISTORY
26 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
27 | % Version: 1.7
28 | % Author/Date: Milan Tepic / 2017-02-07
29 | % Change: Initial version
30 | %
31 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
32 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
33 |
34 | clear all
35 | close all
36 | clc
37 |
38 | % load('wheel_speeds.mat');
39 |
40 | % SIMULATION PARAMETERS
41 | g = 9.80037; % [m/s^2]
42 | SIM_TIME = 3.5; % [s]
43 | dt = 1e-3; % [s]
44 |
45 | % PI CONTROLER PARAMETERS
46 | Kp = 5;
47 | Ti = 0.08;
48 | interrupt = 1e-3; % [s]
49 |
50 | % VEHICLE PARAMETERS
51 | L = 1600*1e-3; % [mm]
52 | T_front = 1250*1e-3; % [mm]
53 | T_rear = 1200*1e-3; % [mm]
54 | CG_height = 340*1e-3; % [mm]
55 | a = 830*1e-3; % [mm]
56 | b = 770*1e-3; % [mm]
57 |
58 | unsprung_mass = 70;
59 | sprung_mass = 174;
60 | driver_mass = 75;
61 | mass = sprung_mass+...
62 | unsprung_mass+...
63 | driver_mass; % [kg]
64 | m1_s = mass*(b/L)/2; % [kg]
65 | m2_s = mass*(b/L)/2; % [kg]
66 | m3_s = mass*(a/L)/2; % [kg]
67 | m4_s = mass*(a/L)/2; % [kg]
68 | max_steer = 135; % [deg]
69 | max_steerSpeed = 540; % [deg/s]
70 | max_Dsteer = max_steerSpeed*dt;
71 |
72 | % ENGINE PARAMETERS
73 | max_speed = 135;
74 | accel_max = 10*dt; % [m/s^2 * dt]
75 | speed_max = 137.8; % [kmh]
76 | brake_max = 20*dt; % [m/s^2 * dt]
77 |
78 | % TYRE PARAMETERS
79 | load('tire_Avon.mat');
80 |
81 | sliped = -tire_Avon(:,2);
82 | lateralLoaded = tire_Avon(:,3).*1e3;
83 |
84 | slipAngle = -12:1e-3:12;
85 | lateralLoad = interp1(sliped,lateralLoaded,slipAngle,'pchip');
86 | C_alpha = (2.7778/2)*1e-03; % [N/deg]
87 | WHEEL_DIAMETER = 0.33/2;
88 |
89 | beta_FL = 0;
90 | beta_FR = 0;
91 | beta_RL = 0;
92 | beta_RR = 0;
93 |
94 | %% DOUBLE LANE CHANGE TEST
95 | speed = 80;
96 | steer = 0;
97 | psi = 0;
98 |
99 | [orientationVector timeVector] = generateOrientation(0,0,0,0.32,dt,'step');
100 | [orientationVector timeVector] = ...
101 | generateOrientation(orientationVector,timeVector,17,0.55,dt,'ramp');
102 | [orientationVector timeVector] = ...
103 | generateOrientation(orientationVector,timeVector,17,0.08,dt,'step');
104 | [orientationVector timeVector] = ...
105 | generateOrientation(orientationVector,timeVector,0,0.55,dt,'ramp');
106 | [orientationVector timeVector] = ...
107 | generateOrientation(orientationVector,timeVector,0,0.05,dt,'step');
108 | [orientationVector timeVector] = ...
109 | generateOrientation(orientationVector,timeVector,-14,0.55,dt,'ramp');
110 | [orientationVector timeVector] = ...
111 | generateOrientation(orientationVector,timeVector,-14,0.05,dt,'step');
112 | [orientationVector timeVector] = ...
113 | generateOrientation(orientationVector,timeVector,0,0.55,dt,'ramp');
114 | [orientationVector timeVector] = ...
115 | generateOrientation(orientationVector,timeVector,0,.45,dt,'step');
116 |
117 | m1 = m1_s; m2 = m2_s; m3 = m3_s; m4 = m4_s;
118 |
119 | vehicle_Params = [L T_front T_rear CG_height a b mass m1_s m2_s m3_s m4_s psi];
120 | sym_Params = [steer(1) speed max_steer max_speed C_alpha g dt];
121 | tire_Params = [beta_FL beta_FR beta_RL beta_RR];
122 | wheel_location = [-a,0];
123 |
124 | % INIT START LOCATION
125 | x_CG(1) = 0;
126 | y_CG(1) = 0;
127 |
128 | x_CC(1) = -b*cos(psi(1));
129 | y_CC(1) = -b*sin(psi(1));
130 |
131 | x_FR(1) = x_CG(1)+sqrt(a^2+(T_front/2)^2)*cos(psi(1)-atan((T_front/2)/a));
132 | y_FR(1) = y_CG(1)+sqrt(a^2+(T_front/2)^2)*sin(psi(1)-atan((T_front/2)/a));
133 |
134 | x_RR(1) = x_CG(1)-b*cos(psi(1))+(T_rear/2)*sin(psi(1));
135 | y_RR(1) = y_CG(1)-b*sin(psi(1))-(T_rear/2)*cos(psi(1));
136 |
137 | x_FL(1) = x_FR(1)-T_front*sin(psi(1));
138 | y_FL(1) = y_FR(1)+T_front*cos(psi(1));
139 |
140 | x_RL(1) = x_RR(1)-T_rear*sin(psi(1));
141 | y_RL(1) = y_RR(1)+T_rear*cos(psi(1));
142 |
143 | d_psi = 0; sigma_CG = 0;
144 |
145 | m1 = m1_s; m2 = m2_s;
146 | m3 = m3_s; m4 = m4_s;
147 |
148 | dm_longitudinal = [0; 0];
149 | dm_lateral = [0; 0];
150 |
151 | FL_speed = 0;
152 | FR_speed = 0;
153 | RL_speed = 0;
154 | RR_speed = 0;
155 | wheel_speeds = [FL_speed' FR_speed' RL_speed' RR_speed'];
156 |
157 | acp_CG = 0; acp_psi = 0;
158 |
159 | time = 0;
160 | e = [];
161 | u = [];
162 | lastState = 0;
163 | for position = 1:length(timeVector)
164 | if((mod(timeVector(position),interrupt))==0)
165 | e(position) = round((orientationVector(position)-psi(position)*180/pi)*1e4)/1e4;
166 | u(position) = Kp*e(position)+Kp*dt*e(position)/Ti;
167 |
168 | if(position>1)
169 | if(u(position)>0 && u(position-1)>0 &&...
170 | u(position)-u(position-1)>max_Dsteer)
171 |
172 | u(position) = u(position-1)+max_Dsteer;
173 | else if(u(position)>0 && u(position-1)>0 &&...
174 | u(position)-u(position-1)<-max_Dsteer)
175 | u(position) = u(position-1)-max_Dsteer;
176 | end
177 | end
178 | if(u(position)<0 && u(position-1)<0 &&...
179 | u(position)-u(position-1)<-max_Dsteer)
180 |
181 | u(position) = u(position-1)-max_Dsteer;
182 | else if(u(position)<0 && u(position-1)<0 &&...
183 | u(position)-u(position-1)>max_Dsteer)
184 | u(position) = u(position-1)+max_Dsteer;
185 | end
186 | end
187 |
188 | if(u(position)>0 && u(position-1)<0 &&...
189 | u(position)-u(position-1)>max_Dsteer)
190 |
191 | u(position) = u(position-1)+max_Dsteer;
192 | else if(u(position)<0 && u(position-1)>0 &&...
193 | u(position)-u(position-1)<-max_Dsteer)
194 | u(position) = u(position-1)-max_Dsteer;
195 | end
196 | end
197 | else
198 | if(u(position)>max_Dsteer)
199 | u(position) = max_Dsteer;
200 | else if(u(position)<-max_Dsteer)
201 | u(position) = -max_Dsteer;
202 | end
203 | end
204 | end
205 |
206 | if(u(position)>135)
207 | u(position) = 135;
208 | else if(u(position)<-135)
209 | u(position) = -135;
210 | end
211 | end
212 | else
213 | e(position) = e(position-1);
214 | u(position) = Kp*e(position)+Kp*dt*e(position)/Ti;
215 | end
216 | steer = [steer; u(position)];
217 |
218 | vehicle_Params = [L T_front T_rear CG_height a b mass m1(position) m2(position) m3(position) m4(position) psi(position)];
219 | sym_Params = [steer(position) speed(1) max_steer max_speed C_alpha g dt];
220 | tire_Params = [beta_FL(position) beta_FR(position) beta_RL(position) beta_RR(position)];
221 | wheel_location = [x_CG(position) y_CG(position)...
222 | x_FR(position) y_FR(position)...
223 | x_RR(position) y_RR(position)...
224 | x_FL(position) y_FL(position)...
225 | x_RL(position) y_RL(position)];
226 | [output lastState] = wheel_move(wheel_speeds,vehicle_Params,sym_Params,tire_Params,wheel_location,slipAngle,lateralLoad,lastState);
227 |
228 | x_FL = [x_FL; output(2,1)]; y_FL = [y_FL; output(2,7)];
229 | x_FR = [x_FR; output(2,2)]; y_FR = [y_FR; output(2,8)];
230 | x_RL = [x_RL; output(2,3)]; y_RL = [y_RL; output(2,9)];
231 | x_RR = [x_RR; output(2,4)]; y_RR = [y_RR; output(2,10)];
232 | x_CG = [x_CG; output(2,5)]; y_CG = [y_CG; output(2,11)];
233 | x_CC = [x_CC; output(2,6)]; y_CC = [y_CC; output(2,12)];
234 |
235 | psi = [psi; output(2,13)]; d_psi = [d_psi; output(2,14)];
236 |
237 | beta_FL = [beta_FL; output(2,15)];
238 | beta_FR = [beta_FR; output(2,16)];
239 | beta_RL = [beta_RL; output(2,17)];
240 | beta_RR = [beta_RR; output(2,18)];
241 |
242 | sigma_CG = [sigma_CG; output(2,19)]; %time = [time; output(2,20)];
243 |
244 | m1 = [m1; output(2,21)]; m2 = [m2; output(2,22)];
245 | m3 = [m3; output(2,23)]; m4 = [m4; output(2,24)];
246 | dm_longitudinal = [dm_longitudinal output(:,27)];
247 | dm_lateral = [dm_lateral -output(:,28)];
248 |
249 | FL_speed = [FL_speed output(2,29)/WHEEL_DIAMETER];
250 | FR_speed = [FR_speed output(2,30)/WHEEL_DIAMETER];
251 | RL_speed = [RL_speed output(2,31)/WHEEL_DIAMETER];
252 | RR_speed = [RR_speed output(2,32)/WHEEL_DIAMETER];
253 | wheel_speeds = [FL_speed(end) FR_speed(end) RL_speed(end) RR_speed(end)];
254 |
255 | acp_CG = [acp_CG; output(2,25)]; acp_psi = [acp_psi; output(2,26)];
256 | time = [time time(end)+dt];
257 | end
258 |
259 | wheel_speeds = [FL_speed' FR_speed' RL_speed' RR_speed'];
260 |
261 | x = [x_FL x_FR x_RL x_RR x_CG x_CC];
262 | y = [y_FL y_FR y_RL y_RR y_CG y_CC];
263 |
264 | m = [m1 m2 m3 m4 mass.*ones(length(time),1) dm_lateral' dm_longitudinal']; % size = length(time) x (4+1+2+2)
265 | beta = [beta_FL beta_FR beta_RL beta_RR];
266 |
267 | vehicle_Params = [L T_front T_rear CG_height a b g speed dt];
268 | tire_Params = [C_alpha WHEEL_DIAMETER];
269 |
270 | orientationVector = [orientationVector; orientationVector(end)];
271 | timeVector = [timeVector; timeVector(end)];
272 |
273 | data = [x y m beta wheel_speeds psi d_psi acp_psi acp_CG sigma_CG steer time' orientationVector timeVector];
274 | disp(['Total time for ISO-standard test: ', num2str(max(time)),'s.']);
275 | disp(['Distance: ', num2str(max(x_CG)),'m.']);
276 | disp(['Max lateral G: ', num2str(max(acp_CG)/g),'G.']);
277 |
278 | plotData(data,vehicle_Params,tire_Params,'DLC');
--------------------------------------------------------------------------------
/Matlab/READ_ME.md:
--------------------------------------------------------------------------------
1 | # TESTS
2 |
3 | **v07** - its is the **main** where everything originates (estimated time execution ~1min @ [i3-2xxx, 8GB RAM])
4 |
5 | **DoubleLaneChange** - it is designed to simulate control for the standard ISO3888 Double Lane Change ( **DLC** ) test. Downside of this simulation test is that the speed is maintained during the simulated test. It is needed to implement friction model in order to give additional action-reaction to have an influence on the vehicle speed and handling.
6 |
7 | **userDefinedTest** - it present a code for different vehicle handlings - *FREE TEST*
8 |
9 | # FUNCTIONS
10 | Additional functions used in two previous tests:
11 |
12 | *doubleLaneChange* - it generates cones positions for DLC and gates in positions which are input parameters
13 |
14 | *plotData* - it plots all simulation parameters. The last input argument must be: {'DLC', 'etc'}. *DLC* is for Double-Lane-Change test, whilst *etc* is for everything else for now (free test)
15 |
16 | *generateOrientation* - it is used for generating control reference for car handling. Reference is car orientation over time. It returns a vector of vehicle's orientation over time and it also returns time vector. The last input argument is one of {'ramp', 'step'}. It defines the time of generated control reference - does the control reference changes with unit step type or it is more "smooth" using ramp type.
17 |
18 | # Additional files
19 |
20 | *tire_Avon* - it holds the data about tires used on FSRA16 (Road Arrow vehicle from 2016)
21 |
22 | *wheel_speeds* - angular speed of each wheel generated from previous simulations (currently unused so far, since the control of vehicle is not implemented to control wheels, only steering wheel). For such improvements, it is needed to add momentum equations about load and speed of each wheel over the whole system (vehicle). System is already too non-linear, therefor this was not implemented due to deadline to finish final Bachelor thesis. This is one of the following steps of improvements.
23 |
--------------------------------------------------------------------------------
/Matlab/doubleLaneChange.m:
--------------------------------------------------------------------------------
1 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
2 | %
3 | % Copyright (c) *
4 | % All rights reserved by Milan Tepic
5 | %
6 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
7 | %
8 | % Function: doubleLaneChange
9 | % Input parameters: none
10 | % Return parameters:
11 | % - output << generated vehicle trajectory for control
12 | % - cones << position of cones for double lane change test
13 | %
14 | %
15 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
16 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
17 | %
18 | %
19 | % DESCRIPTION
20 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
21 | %
22 | % The main program, where everything originates
23 | %
24 | %
25 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
26 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
27 | %
28 | %
29 | % HISTORY
30 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
31 | % Version: 1.7
32 | % Author/Date: Milan Tepic / 2017-02-07
33 | % Change: Initial version
34 | %
35 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
36 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
37 |
38 | function [output,cones] = doubleLaneChange()
39 |
40 | % generate double-lane change cones
41 | %cones_X = [10 15 20 31 37.5 44 57 63 69]-10;
42 |
43 | cones_X = [0 6 12 25.5 31 36.5 49 55 61]+830*1e-3;
44 | cones_Y_left = [0.8125 0.8125 0.8125...
45 | 3.9375 3.9375 3.9375...
46 | 1.5 1.5 1.5];
47 | cones_Y_right = [-0.8125 -0.8125 -0.8125...
48 | 1.8125 1.8125 1.8125...
49 | -1.5 -1.5 -1.5];
50 | cones = [cones_X; cones_Y_left; cones_Y_right]';
51 | %'
52 | % generate vehicle trajectory
53 | s_1 = atan(-5:0.05:4.5); %-5.7
54 | s_1 = s_1+1.45;
55 | s_1 = s_1-s_1(1);
56 | % s_2 = -atan(-5.7:0.05:4.5); %neprekidnost funkcije s_1 i s_2
57 | s_2 = -atan(-4:0.05:4.5);
58 | s_2 = s_2+1.45;
59 | s_2 = s_2-s_2(end);
60 | x_1 = 0:0.05:15;
61 | x_2 = linspace(15,37.5,length(s_1));
62 | x_3 = linspace(37.5,63,length(s_2));
63 | x_4 = 63:0.05:80;
64 | p_1 = zeros(1,length(x_1));
65 | p_4 = zeros(1,length(x_4));
66 | x = [x_1 x_2 x_3 x_4];
67 | y = [p_1 s_1 s_2 p_4];
68 |
69 | output = [x' y'];
70 | end
--------------------------------------------------------------------------------
/Matlab/generateOrientation.m:
--------------------------------------------------------------------------------
1 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
2 | %
3 | % Copyright (c) *
4 | % All rights reserved by Milan Tepic
5 | %
6 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
7 | %
8 | % Function: generateOrientation
9 | % Input parameters:
10 | % Return parameters:
11 | %
12 | %
13 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
14 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
15 | %
16 | %
17 | % DESCRIPTION
18 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
19 | %
20 | % It is used for generating control reference for car
21 | % handling. Reference is car orientation over time. It
22 | % returns a vector of vehicle's orientation over time and
23 | % it also returns time vector. The last input argument is
24 | % one of {'ramp', 'step'}. It defines the time of generated
25 | % control reference - does the control reference changes
26 | % with unit step type or it is more "smooth" using ramp type.
27 | %
28 | %
29 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
30 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
31 | %
32 | %
33 | % HISTORY
34 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
35 | % Version: 1.7
36 | % Author/Date: Milan Tepic / 2017-02-07
37 | % Change: Initial version
38 | %
39 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
40 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
41 |
42 | function [orientationVector timeVector] = generateOrientation(orientationVector,timeVector,finalOrientation,time_transition,dt,style)
43 | if(length(style)==4)
44 | if(mean(style=='step') || mean(style=='ramp'))
45 | multiplier = round(time_transition/dt);
46 | addTime = linspace(timeVector(end,1),timeVector(end,1)+multiplier*dt,multiplier+1);
47 |
48 | timeVector = [timeVector; addTime'];
49 | if(mean(style=='ramp')==1)
50 | addOrientation = linspace(orientationVector(end,1),finalOrientation,multiplier+1);
51 | else if(mean(style=='step')==1)
52 | addOrientation = linspace(finalOrientation,finalOrientation,multiplier+1);
53 | end
54 | end
55 | orientationVector = [orientationVector; addOrientation'];
56 | else
57 |
58 | disp('Wrong input for signal configuration. RAMP or STEP are supported ONLY currently');
59 | end
60 | else
61 | disp('Wrong input for signal configuration. RAMP or STEP are supported ONLY currently');
62 | end
63 | end
--------------------------------------------------------------------------------
/Matlab/plotData.m:
--------------------------------------------------------------------------------
1 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
2 | %
3 | % Copyright (c) *
4 | % All rights reserved by Milan Tepic
5 | %
6 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
7 | %
8 | % Function: plotData
9 | % Input parameters:
10 | % Return parameters:
11 | %
12 | %
13 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
14 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
15 | %
16 | %
17 | % DESCRIPTION
18 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
19 | %
20 | % it plots all simulation parameters. The last input argument
21 | % must be: {'DLC', 'etc'}. *DLC* is for Double-Lane-Change
22 | % test, whilst *etc* is for everything else for now (free test)
23 | %
24 | %
25 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
26 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
27 | %
28 | %
29 | % HISTORY
30 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
31 | % Version: 1.7
32 | % Author/Date: Milan Tepic / 2017-02-07
33 | % Change: Initial version
34 | %
35 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
36 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
37 |
38 | function done = plotData(data,vehicle_Params,tire_Params,test)
39 | if(length(test)==3)
40 | if(test=='DLC')
41 | x = data(:,1:6);
42 | y = data(:,7:12);
43 | m = data(:,13:21);
44 | beta = data(:,22:25);
45 | wheel_speeds = data(:,26:29);
46 |
47 | psi = data(:,30);
48 | d_psi = data(:,31);
49 | acp_psi = data(:,32);
50 | acp_CG = data(:,33);
51 | sigma_CG = data(:,34);
52 | steer = data(:,35);
53 | time = data(:,36);
54 |
55 | orientationVector = data(:,37);
56 | timeVector = data(:,38);
57 |
58 | x_FL = x(:,1); y_FL = y(:,1);
59 | x_FR = x(:,2); y_FR = y(:,2);
60 | x_RL = x(:,3); y_RL = y(:,3);
61 | x_RR = x(:,4); y_RR = y(:,4);
62 | x_CG = x(:,5); y_CG = y(:,5);
63 | x_CC = x(:,6); y_CC = y(:,6);
64 |
65 | beta_FL = beta(:,1);
66 | beta_FR = beta(:,2);
67 | beta_RL = beta(:,3);
68 | beta_RR = beta(:,4);
69 |
70 | m1 = m(:,1); m2 = m(:,2);
71 | m3 = m(:,3); m4 = m(:,4);
72 | mass = m(:,5);
73 | dm_lateral = m(:,6:7);
74 | dm_longitudinal = m(:,8:9);
75 |
76 | FL_speed = wheel_speeds(:,1);
77 | FR_speed = wheel_speeds(:,2);
78 | RL_speed = wheel_speeds(:,3);
79 | RR_speed = wheel_speeds(:,4);
80 |
81 | L = vehicle_Params(1);
82 | T_front = vehicle_Params(2);
83 | T_rear = vehicle_Params(3);
84 | CG_height = vehicle_Params(4);
85 | a = vehicle_Params(5);
86 | b = vehicle_Params(6);
87 | g = vehicle_Params(7);
88 | speed = vehicle_Params(8);
89 | dt = vehicle_Params(9);
90 |
91 | C_alpha = tire_Params(1);
92 | WHEEL_DIAMETER = tire_Params(2);
93 |
94 | load('tire_Avon.mat');
95 |
96 | sliped = -tire_Avon(:,2);
97 | lateralLoaded = tire_Avon(:,3).*1e3;
98 |
99 | slipAngle = -12:1e-3:12;
100 | lateralLoad = interp1(sliped,lateralLoaded,slipAngle,'pchip');
101 |
102 |
103 | [trajectory, cones] = doubleLaneChange;
104 |
105 | cones_X = cones(:,1);
106 | cones_Y_left = cones(:,2);
107 | cones_Y_right = cones(:,3);
108 | trajectory_x = trajectory(:,1);
109 | trajectory_y = trajectory(:,2);
110 |
111 | tg = uitabgroup;
112 | fig1 = figure(1);
113 | fig1.Name = 'Vehicle model';
114 | fig1.Position = [10 55 1342 623];
115 | fig1.NumberTitle = 'off';
116 |
117 | % fig1 = figure;
118 | % % fig1.Position = [56 54 1221 617];
119 | % fig1.Position = [5 63 1221 617];
120 | tab1 = uitab(tg);
121 | axes('Parent',tab1);
122 | tab1.Title = 'Main';
123 |
124 | subplot(4,4,[1 2 5 6 9 10 13 14]);
125 | plot3(x_CG,y_CG,time,'k',x_FL,y_FL,time,'c',x_FR,y_FR,time,'r',x_RL,y_RL,time,'g',x_RR,y_RR,time,'b');
126 | hold all
127 | % cones_time_vector = linspace(0,max(time),length(cones_X));
128 | plot(cones_X(1:3),cones_Y_left(1:3),'k',...
129 | cones_X(4:6),cones_Y_left(4:6),'k',...
130 | cones_X(7:9),cones_Y_left(7:9),'k',...
131 | cones_X(1:3),cones_Y_right(1:3),'k',...
132 | cones_X(4:6),cones_Y_right(4:6),'k',...
133 | cones_X(7:9),cones_Y_right(7:9),'k');
134 | hold all
135 | plot(cones_X,cones_Y_left,'gO',cones_X,cones_Y_right,'gO',...
136 | 'Color',[1 .5 0],'LineWidth',4);
137 | grid
138 | title('Trajectory');
139 | xlabel('x [m]');
140 | ylabel('y [m]');
141 | view([0 0 1])
142 | axis equal
143 | set(gcf,'Color',[0.85,0.85,0.85]);
144 | set(gca,'Color',[0.7 0.7 0.7]);
145 |
146 | subplot(4,4,3)
147 | plot(time,sigma_CG.*(180/pi));
148 | grid
149 | xlim([0 max(time)]);
150 | title('CG speed vector angle');
151 | xlabel('time [s]');
152 | ylabel(['\sigma_{CG} [ ',char(176),']']);
153 |
154 | subplot(4,4,7)
155 | plot(time,d_psi./dt)
156 | grid
157 | xlim([0 max(time)]);
158 | title('Angular speed');
159 | xlabel('time [s]');
160 | ylabel('\omega [rad/s]');
161 |
162 | subplot(4,4,4)
163 | plot(time,d_psi.*180/pi)
164 | grid
165 | title('\Delta\Psi');
166 | xlim([0 max(time)]);
167 |
168 | subplot(4,4,8)
169 | plot(time,steer.*(135/30));
170 | grid
171 | xlabel('time[s]');
172 | ylabel(['\delta [ ',char(176),']']);
173 | title('Steering angle');
174 | xlim([0 max(time)]);
175 |
176 | subplot(4,4,[11 12 15 16]);
177 | plot(time,m1,'c',time,m2,'r',time,m3,'g',time,m4,'b');
178 | grid
179 | xlabel('time [s]');
180 | ylabel('mass[kg]');
181 | l = legend('Front_{left}','Front_{right}','Rear_{left}','Rear_{right}','Location','SouthWest');
182 | l.Position = [0.9141 0.1096 0.0781 0.1618];
183 | title('Load transfer');
184 | xlim([0 max(time)]);
185 | ylim([0 0.6*max(mass)]);
186 |
187 | % fig2 = figure;
188 | % fig2.Position = [137 46 1221 617];
189 | tab2 = uitab(tg);
190 | axes('Parent',tab2);
191 | tab2.Title = 'Telemetry';
192 | subplot(231)
193 | plot(x_CG,y_CG,'k',x_FL,y_FL,'c',x_FR,y_FR,'r',x_RL,y_RL,'g',x_RR,y_RR,'b');
194 | grid
195 | axis equal
196 | title('Trajectory');
197 | xlabel('X_{axis} [m]');
198 | ylabel('Y_{axis} [m]');
199 |
200 | subplot(232)
201 | psi_calc = mod(psi,2*pi).*180/pi;
202 | psi_calc(psi_calc>180) = psi_calc(psi_calc>180)-360;
203 | plot(time,psi_calc)
204 | hold all
205 | plot(time,orientationVector,'k');
206 | grid
207 | title('Orientation');
208 | xlabel('time [s]');
209 | ylabel(['\Psi [ ',char(176),']']);
210 | xlim([0 max(time)]);
211 |
212 | subplot(234)
213 | plot(time,d_psi.*180/pi)
214 | grid
215 | title('\Delta\Psi');
216 | xlabel('time [s]');
217 | ylabel(['\Delta\Psi [ ', char(176),']']);
218 | xlim([0 max(time)]);
219 |
220 | subplot(235)
221 | plot(time,beta_FL.*180/pi,'c',time,beta_FR.*180/pi,'r');
222 | hold all
223 | plot(time,beta_RL.*180/pi,'g',time,beta_RR.*180/pi,'b');
224 | grid
225 | title('Slip angle');
226 | xlabel('time [s]');
227 | ylabel(['\beta [ ', char(176),']']);
228 | l = legend('Front_{left}','Front_{right}','Rear_{left}','Rear_{right}','Location','NorthWest');
229 | % l.Position = [0.5620 0.4581 0.0636 0.0641];
230 | l.Position = [0.5998 0.3878 0.0778 0.1540];
231 | xlim([0 max(time)]);
232 |
233 | subplot(233)
234 | plot(time,x_CC,[time(1) time(end)], [b b],'r');
235 | grid
236 | title('Curvature center X_{car}')
237 | xlabel('time [s]');
238 | ylabel('Rx_C [m]');
239 | xlim([0 max(time)]);
240 |
241 | subplot(236)
242 | plot(time,y_CC);
243 | grid
244 | title('Curvature center Y_{car}')
245 | xlabel('time [s]');
246 | ylabel('Ry_C [m]');
247 | % if(median(y_CC)~=0)
248 | % ylim([-10*abs(median(y_CC)) 10*abs(median(y_CC))]);
249 | % else
250 | % ylim([-5 5]);
251 | % end
252 | xlim([0 max(time)]);
253 |
254 | % fig3 = figure(3);
255 | % fig3.Position = [1396 81 906 618];
256 | % % fig3.Position = [75 56 906 618];
257 | tab3 = uitab(tg);
258 | axes('Parent',tab3);
259 | tab3.Title = 'Load transfer';
260 | subplot(2,4,1)
261 | plot(time,acp_CG./g);
262 | grid
263 | xlabel('time [s]');
264 | ylabel('Lateral [G]');
265 | title('A_{cp} CG');
266 | xlim([0 max(time)]);
267 |
268 | subplot(2,4,2)
269 | plot(-acp_psi.*180/pi,time);
270 | grid
271 | xlabel(['Longitudinal[ ', char(176), ']']);
272 | ylabel('time [s]');
273 | title('A_{cp} \Psi');
274 | ylim([0 max(time)]);
275 |
276 | subplot(2,4,[5 6])
277 | plot(time,dm_longitudinal);
278 | grid
279 | xlabel('time [s]');
280 | ylabel('load [%]');
281 | title('\Deltam_{longitudinal}');
282 | xlim([0 max(time)]);
283 | legend('Front axle','Rear axle');
284 |
285 | subplot(2,4,[3 4 7 8])
286 | plot(dm_lateral.*100,time);
287 | grid
288 | xlabel('load [%]');
289 | ylabel('time [s]');
290 | title('\Deltam_{lateral}');
291 | ylim([0 max(time)]);
292 | legend('Front axle','Rear axle');
293 |
294 | % fig4 = figure(4);
295 | % fig4.Position = [48 87 1269 579];
296 | % % subplot(211)
297 | tab4 = uitab(tg);
298 | axes('Parent',tab4);
299 | subplot(3,4,[1:8])
300 | tab4.Title = 'ISO DoubleLaneChange';
301 | plot(x_FL,y_FL,'c',x_FR,y_FR,'r',x_RL,y_RL,'g',x_RR,y_RR,'b','Linewidth',2.5);
302 | hold all
303 | plot(x_CG,y_CG,'k','Linewidth',2.5)
304 | hold all
305 | plot(cones_X,cones_Y_left,'gO',cones_X,cones_Y_right,'gO',...
306 | 'Color',[1 .5 0],'LineWidth',4);
307 | hold all
308 | plot(cones_X(1:3),cones_Y_left(1:3),'k',...
309 | cones_X(4:6),cones_Y_left(4:6),'k',...
310 | cones_X(7:9),cones_Y_left(7:9),'k',...
311 | cones_X(1:3),cones_Y_right(1:3),'k',...
312 | cones_X(4:6),cones_Y_right(4:6),'k',...
313 | cones_X(7:9),cones_Y_right(7:9),'k');
314 | hold all
315 | % plot([0 11 27 39 51 65],[0 0 3 3 0 0],'c','Linewidth',2);
316 | grid
317 | axis([-5 65 -5 6]);
318 | if(max(max(x(:,1:4)))>65)
319 | xlim([min(min(x(:,1:4)))-5 max(max(x(:,1:4)))+5]);
320 | end
321 | if(max(max(y(:,1:4)))>65)
322 | ylim([min(min(y(:,1:4)))-5 max(max(y(:,1:4)))+5]);
323 | end
324 | xlabel('X_{axis} [m]');
325 | ylabel('Y_{axis} [m]');
326 | title(['ISO - Double Lane Change ', num2str(speed),'km/h']);
327 | legend('Front Left','Front Right','Rear Left', 'Rear Right','C/G',...
328 | 'Cones','Location','South');
329 | set(gcf,'Color',[0.85,0.85,0.85]);
330 | set(gca,'Color',[0.7 0.7 0.7]);
331 | lateral_G = acp_CG./g;
332 | max_G_txt = ['\leftarrow G_{lateral} = ',num2str(max(lateral_G)),'G'];
333 | maxG_xLoc = find(lateral_G==max(lateral_G));
334 | maxG_yLoc = find(lateral_G==max(lateral_G));
335 | text(x_RR(maxG_xLoc([1 end])),...
336 | y_RR(maxG_yLoc([1 end])),max_G_txt)
337 | annotation('textbox',...
338 | [0.8 0.73 0.10 0.10],...
339 | 'String',{' 70 km/h'},...
340 | 'FontSize',14,...
341 | 'FontName','Arial',...
342 | 'LineWidth',2,...
343 | 'BackgroundColor',[0.9 0.9 0.9],...
344 | 'Color',[0 0 0]);
345 |
346 | % fig5 = figure(5);
347 | % fig5.Position = [1858 528 787 398];
348 | % % fig5.Position = [560 272 787 398];
349 | subplot(3,4,9)
350 | plot(time,FL_speed);
351 | grid
352 | xlim([0 max(time)]);
353 | title('Front left');
354 | xlabel('time [s]');
355 | ylabel('\omega [rad/s]')
356 | subplot(3,4,10)
357 | plot(time,RL_speed);
358 | grid
359 | xlim([0 max(time)]);
360 | title('Rear left');
361 | xlabel('time [s]');
362 | ylabel('\omega [rad/s]')
363 | subplot(3,4,11)
364 | plot(time,RR_speed);
365 | grid
366 | xlim([0 max(time)]);
367 | title('Rear rigth');
368 | xlabel('time [s]');
369 | ylabel('\omega [rad/s]')
370 | subplot(3,4,12)
371 | plot(time,FR_speed);
372 | grid
373 | xlim([0 max(time)]);
374 | title('Front right');
375 | xlabel('time [s]');
376 | ylabel('\omega [rad/s]')
377 |
378 | tab5 = uitab(tg);
379 | axes('Parent',tab5);
380 | tab5.Title = 'Car & tires';
381 | subplot(2,1,1)
382 | plot(slipAngle,lateralLoad,sliped,lateralLoaded,'r','Linewidth',1.4);
383 | grid
384 | ylabel('Lateral force [kN]');
385 | xlabel(['Slip angle [ ',char(176), ']']);
386 | title('AVON - Slip angle diagram');
387 | legend('Approx','Look-up table','Location','SouthEast');
388 |
389 | subplot(2,1,2)
390 | plot(time,sqrt((x_FL-x_FR).^2+(y_FL-y_FR).^2),'Linewidth',1.6)
391 | hold all
392 | plot(time,sqrt((x_RL-x_RR).^2+(y_RL-y_RR).^2),'Linewidth',1.6)
393 | hold all
394 | plot(time,sqrt((x_FR-x_RR).^2+(y_FR-y_RR).^2),'Linewidth',1.6)
395 | hold all
396 | plot(time,sqrt((x_FL-x_RL).^2+(y_FL-y_RL).^2),'Linewidth',1.6)
397 | grid
398 | xlim([0 max(time)]);
399 | title('Car measures');
400 | xlabel('time[s]');
401 | ylabel('Distance [m]');
402 | legend('Track_{front}','Track_{rear}',...
403 | 'Wheelbase_{left}','Wheelbase_{right}',...
404 | 'Location','East');
405 |
406 |
407 | tg.SelectedTab = tab4;
408 | done = 1;
409 |
410 | else if(test=='etc')
411 | x = data(:,1:6);
412 | y = data(:,7:12);
413 | m = data(:,13:21);
414 | beta = data(:,22:25);
415 | wheel_speeds = data(:,26:29);
416 |
417 | psi = data(:,30);
418 | d_psi = data(:,31);
419 | acp_psi = data(:,32);
420 | acp_CG = data(:,33);
421 | sigma_CG = data(:,34);
422 | steer = data(:,35);
423 | time = data(:,36);
424 |
425 | orientationVector = data(:,37);
426 | timeVector = data(:,38);
427 |
428 | x_FL = x(:,1); y_FL = y(:,1);
429 | x_FR = x(:,2); y_FR = y(:,2);
430 | x_RL = x(:,3); y_RL = y(:,3);
431 | x_RR = x(:,4); y_RR = y(:,4);
432 | x_CG = x(:,5); y_CG = y(:,5);
433 | x_CC = x(:,6); y_CC = y(:,6);
434 |
435 | beta_FL = beta(:,1);
436 | beta_FR = beta(:,2);
437 | beta_RL = beta(:,3);
438 | beta_RR = beta(:,4);
439 |
440 | m1 = m(:,1); m2 = m(:,2);
441 | m3 = m(:,3); m4 = m(:,4);
442 | mass = m(:,5);
443 | dm_lateral = m(:,6:7);
444 | dm_longitudinal = m(:,8:9);
445 |
446 | FL_speed = wheel_speeds(:,1);
447 | FR_speed = wheel_speeds(:,2);
448 | RL_speed = wheel_speeds(:,3);
449 | RR_speed = wheel_speeds(:,4);
450 |
451 | L = vehicle_Params(1);
452 | T_front = vehicle_Params(2);
453 | T_rear = vehicle_Params(3);
454 | CG_height = vehicle_Params(4);
455 | a = vehicle_Params(5);
456 | b = vehicle_Params(6);
457 | g = vehicle_Params(7);
458 | speed = vehicle_Params(8);
459 | dt = vehicle_Params(9);
460 |
461 | C_alpha = tire_Params(1);
462 | WHEEL_DIAMETER = tire_Params(2);
463 |
464 | load('tire_Avon.mat');
465 |
466 | sliped = -tire_Avon(:,2);
467 | lateralLoaded = tire_Avon(:,3).*1e3;
468 |
469 | slipAngle = -12:1e-3:12;
470 | lateralLoad = interp1(sliped,lateralLoaded,slipAngle,'pchip');
471 |
472 | tg = uitabgroup;
473 | fig1 = figure(1);
474 | fig1.Name = 'Vehicle model';
475 | fig1.Position = [10 55 1342 623];
476 | fig1.NumberTitle = 'off';
477 |
478 | % fig1 = figure;
479 | % % fig1.Position = [56 54 1221 617];
480 | % fig1.Position = [5 63 1221 617];
481 | tab1 = uitab(tg);
482 | axes('Parent',tab1);
483 | tab1.Title = 'Main';
484 |
485 | subplot(4,4,[1 2 5 6 9 10 13 14]);
486 | plot3(x_CG,y_CG,time,'k',x_FL,y_FL,time,'c',x_FR,y_FR,time,'r',x_RL,y_RL,time,'g',x_RR,y_RR,time,'b');
487 | hold all
488 | grid
489 |
490 | title('Trajectory');
491 | xlabel('x [m]');
492 | ylabel('y [m]');
493 | view([0 0 1])
494 | axis equal
495 | set(gcf,'Color',[0.85,0.85,0.85]);
496 | set(gca,'Color',[0.7 0.7 0.7]);
497 |
498 | subplot(4,4,3)
499 | plot(time,sigma_CG.*(180/pi));
500 | grid
501 | xlim([0 max(time)]);
502 | title('CG speed vector angle');
503 | xlabel('time [s]');
504 | ylabel(['\sigma_{CG} [ ',char(176),']']);
505 |
506 | subplot(4,4,7)
507 | plot(time,d_psi./dt)
508 | grid
509 | xlim([0 max(time)]);
510 | title('Angular speed');
511 | xlabel('time [s]');
512 | ylabel('\omega [rad/s]');
513 |
514 | subplot(4,4,4)
515 | plot(time,d_psi.*180/pi)
516 | grid
517 | title('\Delta\Psi');
518 | xlim([0 max(time)]);
519 |
520 | subplot(4,4,8)
521 | plot(time,steer.*(135/30));
522 | grid
523 | xlabel('time[s]');
524 | ylabel(['\delta [ ',char(176),']']);
525 | title('Steering angle');
526 | xlim([0 max(time)]);
527 |
528 | subplot(4,4,[11 12 15 16]);
529 | plot(time,m1,'c',time,m2,'r',time,m3,'g',time,m4,'b');
530 | grid
531 | xlabel('time [s]');
532 | ylabel('mass[kg]');
533 | l = legend('Front_{left}','Front_{right}','Rear_{left}','Rear_{right}','Location','SouthWest');
534 | l.Position = [0.9141 0.1096 0.0781 0.1618];
535 | title('Load transfer');
536 | xlim([0 max(time)]);
537 | ylim([0 0.6*max(mass)]);
538 |
539 | % fig2 = figure;
540 | % fig2.Position = [137 46 1221 617];
541 | tab2 = uitab(tg);
542 | axes('Parent',tab2);
543 | tab2.Title = 'Telemetry';
544 | subplot(231)
545 | plot(x_CG,y_CG,'k',x_FL,y_FL,'c',x_FR,y_FR,'r',x_RL,y_RL,'g',x_RR,y_RR,'b');
546 | grid
547 | axis equal
548 | title('Trajectory');
549 | xlabel('X_{axis} [m]');
550 | ylabel('Y_{axis} [m]');
551 |
552 | subplot(232)
553 | psi_calc = mod(psi,2*pi).*180/pi;
554 | psi_calc(psi_calc>180) = psi_calc(psi_calc>180)-360;
555 | plot(time,psi_calc)
556 | hold all
557 | plot(time,orientationVector,'k');
558 | grid
559 | title('Orientation');
560 | xlabel('time [s]');
561 | ylabel(['\Psi [ ',char(176),']']);
562 | xlim([0 max(time)]);
563 |
564 | subplot(234)
565 | plot(time,d_psi.*180/pi)
566 | grid
567 | title('\Delta\Psi');
568 | xlabel('time [s]');
569 | ylabel(['\Delta\Psi [ ', char(176),']']);
570 | xlim([0 max(time)]);
571 |
572 | subplot(235)
573 | plot(time,beta_FL.*180/pi,'c',time,beta_FR.*180/pi,'r');
574 | hold all
575 | plot(time,beta_RL.*180/pi,'g',time,beta_RR.*180/pi,'b');
576 | grid
577 | title('Slip angle');
578 | xlabel('time [s]');
579 | ylabel(['\beta [ ', char(176),']']);
580 | l = legend('Front_{left}','Front_{right}','Rear_{left}','Rear_{right}','Location','NorthWest');
581 | % l.Position = [0.5620 0.4581 0.0636 0.0641];
582 | l.Position = [0.5998 0.3878 0.0778 0.1540];
583 | xlim([0 max(time)]);
584 |
585 | subplot(233)
586 | plot(time,x_CC,[time(1) time(end)], [b b],'r');
587 | grid
588 | title('Curvatore center X_{car}')
589 | xlabel('time [s]');
590 | ylabel('Rx_C [m]');
591 | xlim([0 max(time)]);
592 |
593 | subplot(236)
594 | plot(time,y_CC);
595 | grid
596 | title('Curvatore center Y_{car}')
597 | xlabel('time [s]');
598 | ylabel('Ry_C [m]');
599 | % if(median(y_CC)~=0)
600 | % ylim([-10*abs(median(y_CC)) 10*abs(median(y_CC))]);
601 | % else
602 | % ylim([-5 5]);
603 | % end
604 | xlim([0 max(time)]);
605 |
606 | % fig3 = figure(3);
607 | % fig3.Position = [1396 81 906 618];
608 | % % fig3.Position = [75 56 906 618];
609 | tab3 = uitab(tg);
610 | axes('Parent',tab3);
611 | tab3.Title = 'Load transfer';
612 | subplot(2,4,1)
613 | plot(time,acp_CG./g);
614 | grid
615 | xlabel('time [s]');
616 | ylabel('Lateral [G]');
617 | title('A_{cp} CG');
618 | xlim([0 max(time)]);
619 |
620 | subplot(2,4,2)
621 | plot(-acp_psi.*180/pi,time);
622 | grid
623 | xlabel(['Longitudinal[ ', char(176), ']']);
624 | ylabel('time [s]');
625 | title('A_{cp} \Psi');
626 | ylim([0 max(time)]);
627 |
628 | subplot(2,4,[5 6])
629 | plot(time,dm_longitudinal);
630 | grid
631 | xlabel('time [s]');
632 | ylabel('load [%]');
633 | title('\Deltam_{longitudinal}');
634 | xlim([0 max(time)]);
635 | legend('Front axle','Rear axle');
636 |
637 | subplot(2,4,[3 4 7 8])
638 | plot(dm_lateral.*100,time);
639 | grid
640 | xlabel('load [%]');
641 | ylabel('time [s]');
642 | title('\Deltam_{lateral}');
643 | ylim([0 max(time)]);
644 | legend('Front axle','Rear axle');
645 |
646 | % fig4 = figure(4);
647 | % fig4.Position = [48 87 1269 579];
648 | % % subplot(211)
649 | tab4 = uitab(tg);
650 | axes('Parent',tab4);
651 | subplot(3,4,[1:8])
652 | tab4.Title = 'User defined free test';
653 | plot(x_FL,y_FL,'c',x_FR,y_FR,'r',x_RL,y_RL,'g',x_RR,y_RR,'b','Linewidth',2.5);
654 | hold all
655 | plot(x_CG,y_CG,'k','Linewidth',2.5)
656 | hold all
657 | grid
658 | if(max(max(x(:,1:4)))>65)
659 | xlim([min(min(x(:,1:4)))-5 max(max(x(:,1:4)))+5]);
660 | end
661 | if(max(max(y(:,1:4)))>65)
662 | ylim([min(min(y(:,1:4)))-5 max(max(y(:,1:4)))+5]);
663 | end
664 | xlabel('X_{axis} [m]');
665 | ylabel('Y_{axis} [m]');
666 | title(['User defined free test at ', num2str(speed),'km/h']);
667 | legend('Front Left','Front Right','Rear Left', 'Rear Right','C/G',...
668 | 'Location','South');
669 | set(gcf,'Color',[0.85,0.85,0.85]);
670 | set(gca,'Color',[0.7 0.7 0.7]);
671 | lateral_G = acp_CG./g;
672 | max_G_txt = ['\leftarrow G_{lateral} = ',num2str(max(lateral_G)),'G'];
673 | maxG_xLoc = find(lateral_G==max(lateral_G));
674 | maxG_yLoc = find(lateral_G==max(lateral_G));
675 | text(x_RR(maxG_xLoc([1 end])),...
676 | y_RR(maxG_yLoc([1 end])),max_G_txt)
677 | annotation('textbox',...
678 | [0.8 0.73 0.10 0.10],...
679 | 'String',{' 70 km/h'},...
680 | 'FontSize',14,...
681 | 'FontName','Arial',...
682 | 'LineWidth',2,...
683 | 'BackgroundColor',[0.9 0.9 0.9],...
684 | 'Color',[0 0 0]);
685 |
686 | % fig5 = figure(5);
687 | % fig5.Position = [1858 528 787 398];
688 | % % fig5.Position = [560 272 787 398];
689 | subplot(3,4,9)
690 | plot(time,FL_speed);
691 | grid
692 | xlim([0 max(time)]);
693 | title('Front left');
694 | xlabel('time [s]');
695 | ylabel('\omega [rad/s]')
696 | subplot(3,4,10)
697 | plot(time,RL_speed);
698 | grid
699 | xlim([0 max(time)]);
700 | title('Rear left');
701 | xlabel('time [s]');
702 | ylabel('\omega [rad/s]')
703 | subplot(3,4,11)
704 | plot(time,RR_speed);
705 | grid
706 | xlim([0 max(time)]);
707 | title('Rear rigth');
708 | xlabel('time [s]');
709 | ylabel('\omega [rad/s]')
710 | subplot(3,4,12)
711 | plot(time,FR_speed);
712 | grid
713 | xlim([0 max(time)]);
714 | title('Front right');
715 | xlabel('time [s]');
716 | ylabel('\omega [rad/s]')
717 |
718 | tab5 = uitab(tg);
719 | axes('Parent',tab5);
720 | tab5.Title = 'Car & tires';
721 | subplot(2,1,1)
722 | plot(slipAngle,lateralLoad,sliped,lateralLoaded,'r','Linewidth',1.4);
723 | grid
724 | ylabel('Lateral force [kN]');
725 | xlabel(['Slip angle [ ',char(176), ']']);
726 | title('AVON - Slip angle diagram');
727 | legend('Approx','Look-up table','Location','SouthEast');
728 |
729 | subplot(2,1,2)
730 | plot(time,sqrt((x_FL-x_FR).^2+(y_FL-y_FR).^2),'Linewidth',1.6)
731 | hold all
732 | plot(time,sqrt((x_RL-x_RR).^2+(y_RL-y_RR).^2),'Linewidth',1.6)
733 | hold all
734 | plot(time,sqrt((x_FR-x_RR).^2+(y_FR-y_RR).^2),'Linewidth',1.6)
735 | hold all
736 | plot(time,sqrt((x_FL-x_RL).^2+(y_FL-y_RL).^2),'Linewidth',1.6)
737 | grid
738 | xlim([0 max(time)]);
739 | title('Car measures');
740 | xlabel('time[s]');
741 | ylabel('Distance [m]');
742 | legend('Track_{front}','Track_{rear}',...
743 | 'Wheelbase_{left}','Wheelbase_{right}',...
744 | 'Location','East');
745 |
746 |
747 | tg.SelectedTab = tab4;
748 | done = 1;
749 | else
750 | disp('Wrong test input. Set DLC(Double Lane Change) or etc(user defined free test');
751 | end
752 | end
753 | else
754 |
755 | disp('Wrong test input. Set DLC(Double Lane Change) or etc(user defined free test');
756 | end
757 | end
--------------------------------------------------------------------------------
/Matlab/tire_Avon.mat:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Matlab/tire_Avon.mat
--------------------------------------------------------------------------------
/Matlab/userDefinedTest.m:
--------------------------------------------------------------------------------
1 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
2 | %
3 | % Copyright (c) *
4 | % All rights reserved by Milan Tepic
5 | %
6 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
7 | %
8 | % Filename: userDefinedTest.m
9 | %
10 | %
11 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
12 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
13 | %
14 | %
15 | % DESCRIPTION
16 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
17 | %
18 | % it present a code for different vehicle handlings - *FREE TEST*
19 | %
20 | %
21 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
22 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
23 | %
24 | %
25 | % HISTORY
26 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
27 | % Version: 1.7
28 | % Author/Date: Milan Tepic / 2017-02-07
29 | % Change: Initial version
30 | %
31 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
32 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
33 |
34 | clear all
35 | close all
36 | clc
37 |
38 | % load('wheel_speeds.mat');
39 |
40 | % SIMULATION PARAMETERS
41 | g = 9.80037; % [m/s^2]
42 | SIM_TIME = 3.5; % [s]
43 | dt = 1e-4; % [s]
44 |
45 | % PI CONTROLER PARAMETERS
46 | Kp = 5;
47 | Ti = 0.08;
48 | interrupt = 1e-3; % [s]
49 |
50 | % VEHICLE PARAMETERS
51 | L = 1600*1e-3; % [mm]
52 | T_front = 1250*1e-3; % [mm]
53 | T_rear = 1200*1e-3; % [mm]
54 | CG_height = 340*1e-3; % [mm]
55 | a = 830*1e-3; % [mm]
56 | b = 770*1e-3; % [mm]
57 |
58 | unsprung_mass = 70;
59 | sprung_mass = 174;
60 | driver_mass = 75;
61 | mass = sprung_mass+...
62 | unsprung_mass+...
63 | driver_mass; % [kg]
64 | m1_s = mass*(b/L)/2; % [kg]
65 | m2_s = mass*(b/L)/2; % [kg]
66 | m3_s = mass*(a/L)/2; % [kg]
67 | m4_s = mass*(a/L)/2; % [kg]
68 | max_steer = 135; % [deg]
69 | max_steerSpeed = 540; % [deg/s]
70 | max_Dsteer = max_steerSpeed*dt;
71 |
72 | % ENGINE PARAMETERS
73 | max_speed = 135;
74 | accel_max = 10*dt; % [m/s^2 * dt]
75 | speed_max = 137.8; % [kmh]
76 | brake_max = 20*dt; % [m/s^2 * dt]
77 |
78 | % TYRE PARAMETERS
79 | load('tire_Avon.mat');
80 |
81 | sliped = -tire_Avon(:,2);
82 | lateralLoaded = tire_Avon(:,3).*1e3;
83 |
84 | slipAngle = -12:1e-3:12;
85 | lateralLoad = interp1(sliped,lateralLoaded,slipAngle,'pchip');
86 | C_alpha = (2.7778/2)*1e-03; % [N/deg]
87 | WHEEL_DIAMETER = 0.33/2;
88 |
89 | beta_FL = 0;
90 | beta_FR = 0;
91 | beta_RL = 0;
92 | beta_RR = 0;
93 |
94 | %% USER DEFINED TEST
95 | speed = 57;
96 | steer = 0;
97 | psi = 0;
98 |
99 | [orientationVector timeVector] = generateOrientation(0,0,180,3.5,dt,'ramp');
100 | [orientationVector timeVector] = ...
101 | generateOrientation(orientationVector,timeVector,180,0.5,dt,'step');
102 |
103 | m1 = m1_s; m2 = m2_s; m3 = m3_s; m4 = m4_s;
104 |
105 | vehicle_Params = [L T_front T_rear CG_height a b mass m1_s m2_s m3_s m4_s psi];
106 | sym_Params = [steer(1) speed max_steer max_speed C_alpha g dt];
107 | tire_Params = [beta_FL beta_FR beta_RL beta_RR];
108 | wheel_location = [-a,0];
109 |
110 | % INIT START LOCATION
111 |
112 | x_CG(1) = 0;
113 | y_CG(1) = 0;
114 |
115 | x_CC(1) = -b*cos(psi(1));
116 | y_CC(1) = -b*sin(psi(1));
117 |
118 | x_FR(1) = x_CG(1)+sqrt(a^2+(T_front/2)^2)*cos(psi(1)-atan((T_front/2)/a));
119 | y_FR(1) = y_CG(1)+sqrt(a^2+(T_front/2)^2)*sin(psi(1)-atan((T_front/2)/a));
120 |
121 | x_RR(1) = x_CG(1)-b*cos(psi(1))+(T_rear/2)*sin(psi(1));
122 | y_RR(1) = y_CG(1)-b*sin(psi(1))-(T_rear/2)*cos(psi(1));
123 |
124 | x_FL(1) = x_FR(1)-T_front*sin(psi(1));
125 | y_FL(1) = y_FR(1)+T_front*cos(psi(1));
126 |
127 | x_RL(1) = x_RR(1)-T_rear*sin(psi(1));
128 | y_RL(1) = y_RR(1)+T_rear*cos(psi(1));
129 |
130 | d_psi = 0; sigma_CG = 0;
131 |
132 | m1 = m1_s; m2 = m2_s;
133 | m3 = m3_s; m4 = m4_s;
134 |
135 | dm_longitudinal = [0; 0];
136 | dm_lateral = [0; 0];
137 |
138 | FL_speed = 0;
139 | FR_speed = 0;
140 | RL_speed = 0;
141 | RR_speed = 0;
142 | wheel_speeds = [FL_speed' FR_speed' RL_speed' RR_speed'];
143 |
144 | acp_CG = 0; acp_psi = 0;
145 |
146 | time = 0;
147 | e = [];
148 | u = [];
149 | lastState = 0;
150 | for position = 1:length(timeVector)
151 | if((mod(timeVector(position),interrupt))==0)
152 | e(position) = round((orientationVector(position)-psi(position)*180/pi)*1e4)/1e4;
153 | u(position) = Kp*e(position)+Kp*dt*e(position)/Ti;
154 |
155 | if(position>1)
156 | if(u(position)>0 && u(position-1)>0 &&...
157 | u(position)-u(position-1)>max_Dsteer)
158 |
159 | u(position) = u(position-1)+max_Dsteer;
160 | else if(u(position)>0 && u(position-1)>0 &&...
161 | u(position)-u(position-1)<-max_Dsteer)
162 | u(position) = u(position-1)-max_Dsteer;
163 | end
164 | end
165 | if(u(position)<0 && u(position-1)<0 &&...
166 | u(position)-u(position-1)<-max_Dsteer)
167 |
168 | u(position) = u(position-1)-max_Dsteer;
169 | else if(u(position)<0 && u(position-1)<0 &&...
170 | u(position)-u(position-1)>max_Dsteer)
171 | u(position) = u(position-1)+max_Dsteer;
172 | end
173 | end
174 |
175 | if(u(position)>0 && u(position-1)<0 &&...
176 | u(position)-u(position-1)>max_Dsteer)
177 |
178 | u(position) = u(position-1)+max_Dsteer;
179 | else if(u(position)<0 && u(position-1)>0 &&...
180 | u(position)-u(position-1)<-max_Dsteer)
181 | u(position) = u(position-1)-max_Dsteer;
182 | end
183 | end
184 | else
185 | if(u(position)>max_Dsteer)
186 | u(position) = max_Dsteer;
187 | else if(u(position)<-max_Dsteer)
188 | u(position) = -max_Dsteer;
189 | end
190 | end
191 | end
192 |
193 | if(u(position)>135)
194 | u(position) = 135;
195 | else if(u(position)<-135)
196 | u(position) = -135;
197 | end
198 | end
199 | else
200 | e(position) = e(position-1);
201 | u(position) = Kp*e(position)+Kp*dt*e(position)/Ti;
202 | end
203 | steer = [steer; u(position)];
204 |
205 | vehicle_Params = [L T_front T_rear CG_height a b mass m1(position) m2(position) m3(position) m4(position) psi(position)];
206 | sym_Params = [steer(position) speed(1) max_steer max_speed C_alpha g dt];
207 | tire_Params = [beta_FL(position) beta_FR(position) beta_RL(position) beta_RR(position)];
208 | wheel_location = [x_CG(position) y_CG(position)...
209 | x_FR(position) y_FR(position)...
210 | x_RR(position) y_RR(position)...
211 | x_FL(position) y_FL(position)...
212 | x_RL(position) y_RL(position)];
213 | [output lastState] = wheel_move(wheel_speeds,vehicle_Params,sym_Params,tire_Params,wheel_location,slipAngle,lateralLoad,lastState);
214 |
215 | x_FL = [x_FL; output(2,1)]; y_FL = [y_FL; output(2,7)];
216 | x_FR = [x_FR; output(2,2)]; y_FR = [y_FR; output(2,8)];
217 | x_RL = [x_RL; output(2,3)]; y_RL = [y_RL; output(2,9)];
218 | x_RR = [x_RR; output(2,4)]; y_RR = [y_RR; output(2,10)];
219 | x_CG = [x_CG; output(2,5)]; y_CG = [y_CG; output(2,11)];
220 | x_CC = [x_CC; output(2,6)]; y_CC = [y_CC; output(2,12)];
221 |
222 | psi = [psi; output(2,13)]; d_psi = [d_psi; output(2,14)];
223 |
224 | beta_FL = [beta_FL; output(2,15)];
225 | beta_FR = [beta_FR; output(2,16)];
226 | beta_RL = [beta_RL; output(2,17)];
227 | beta_RR = [beta_RR; output(2,18)];
228 |
229 | sigma_CG = [sigma_CG; output(2,19)]; %time = [time; output(2,20)];
230 |
231 | m1 = [m1; output(2,21)]; m2 = [m2; output(2,22)];
232 | m3 = [m3; output(2,23)]; m4 = [m4; output(2,24)];
233 | dm_longitudinal = [dm_longitudinal output(:,27)];
234 | dm_lateral = [dm_lateral -output(:,28)];
235 |
236 | FL_speed = [FL_speed output(2,29)/WHEEL_DIAMETER];
237 | FR_speed = [FR_speed output(2,30)/WHEEL_DIAMETER];
238 | RL_speed = [RL_speed output(2,31)/WHEEL_DIAMETER];
239 | RR_speed = [RR_speed output(2,32)/WHEEL_DIAMETER];
240 | wheel_speeds = [FL_speed(end) FR_speed(end) RL_speed(end) RR_speed(end)];
241 |
242 | acp_CG = [acp_CG; output(2,25)]; acp_psi = [acp_psi; output(2,26)];
243 | time = [time time(end)+dt];
244 | end
245 |
246 | wheel_speeds = [FL_speed' FR_speed' RL_speed' RR_speed'];
247 |
248 | x = [x_FL x_FR x_RL x_RR x_CG x_CC];
249 | y = [y_FL y_FR y_RL y_RR y_CG y_CC];
250 |
251 | m = [m1 m2 m3 m4 mass.*ones(length(time),1) dm_lateral' dm_longitudinal']; % size = length(time) x (4+1+2+2)
252 | beta = [beta_FL beta_FR beta_RL beta_RR];
253 |
254 | vehicle_Params = [L T_front T_rear CG_height a b g speed dt];
255 | tire_Params = [C_alpha WHEEL_DIAMETER];
256 |
257 | orientationVector = [orientationVector; orientationVector(end)];
258 | timeVector = [timeVector; timeVector(end)];
259 |
260 | data = [x y m beta wheel_speeds psi d_psi acp_psi acp_CG sigma_CG steer time' orientationVector timeVector];
261 | disp(['Total time for ISO-standard test: ', num2str(max(time)),'s.']);
262 | disp(['Distance: ', num2str(max(x_CG)),'m.']);
263 | disp(['Max lateral G: ', num2str(max(acp_CG)/g),'G.']);
264 |
265 | plotData(data,vehicle_Params,tire_Params,'etc');
266 |
--------------------------------------------------------------------------------
/Matlab/v07.m:
--------------------------------------------------------------------------------
1 | clear all
2 | close all
3 | clc
4 |
5 | % load('wheel_speeds.mat');
6 | % used in initial testings with predefined
7 | % generated speed of each wheel
8 |
9 | % =========================================================================
10 | % SIMULATION PARAMETERS
11 | % =========================================================================
12 | g = 9.80037; % [m/s^2]
13 | SIM_TIME = 3.5; % [s]
14 | dt = 1e-4; % [s]
15 |
16 | % =========================================================================
17 | % PI CONTROLER PARAMETERS
18 | % =========================================================================
19 | % PI controller used to control the steering
20 | % wheel steered angle
21 | Kp = 5;
22 | Ti = 0.08;
23 | interrupt = 1e-3; % [s]
24 | % interrupt is used to simulate time when
25 | % the controller samples and
26 | % generates new output
27 |
28 | % =========================================================================
29 | % VEHICLE PARAMETERS of FSRA16
30 | % Description: In simulation are used parameters for the vehicle
31 | % FSRA16 - Formula Student Road Arrow 2016 vehicle
32 | % =========================================================================
33 | L = 1600*1e-3; % [mm] - Length
34 | T_front = 1250*1e-3; % [mm] - Width of FRONT track (FRONT axel width)
35 | T_rear = 1200*1e-3; % [mm] - Width of REAR track (REAR axel width)
36 | CG_height = 340*1e-3; % [mm] - Height of CG (center of gravity)
37 | a = 830*1e-3; % [mm] - Distance from CG to FRONT axel
38 | b = 770*1e-3; % [mm] - Distance from CG to REAR axel
39 |
40 | unsprung_mass = 70;
41 | sprung_mass = 174;
42 | driver_mass = 75; % Estimated Driver mass for average driver
43 | mass = sprung_mass+...
44 | unsprung_mass+...
45 | driver_mass; % [kg]
46 | m1_s = mass*(b/L)/2; % [kg]
47 | m2_s = mass*(b/L)/2; % [kg]
48 | m3_s = mass*(a/L)/2; % [kg]
49 | m4_s = mass*(a/L)/2; % [kg]
50 | max_steer = 135; % [deg]
51 | max_steerSpeed = 540; % [deg/s] - estimated driver's speed of steering
52 | max_Dsteer = max_steerSpeed*dt;
53 |
54 | % =========================================================================
55 | % ENGINE PARAMETERS
56 | % =========================================================================
57 | max_speed = 135; % [km/h] - Projected vehicle's max speed of FSRA16
58 | accel_max = 10*dt; % [m/s^2 * dt]
59 | speed_max = 137.8; % [kmh]
60 | brake_max = 20*dt; % [m/s^2 * dt]
61 |
62 | % =========================================================================
63 | % TYRE PARAMETERS
64 | % Description: FSRA16 uses Avon tires and parameters of these tires are
65 | % stored in the additional file tire_Avon.mat
66 | % This file is generated according to the datasheet from tire
67 | % manufacturer. In following lines, the data had to be
68 | % interpolated since the data from the datasheet has big
69 | % steps in the table review of tire's performances.
70 | % =========================================================================
71 | load('tire_Avon.mat');
72 |
73 | sliped = -tire_Avon(:,2);
74 | lateralLoaded = tire_Avon(:,3).*1e3;
75 |
76 | slipAngle = -12:1e-3:12;
77 | lateralLoad = interp1(sliped,lateralLoaded,slipAngle,'pchip');
78 | C_alpha = (2.7778/2)*1e-03; % [N/deg]
79 | WHEEL_DIAMETER = 0.33/2;
80 |
81 | beta_FL = 0;
82 | beta_FR = 0;
83 | beta_RL = 0;
84 | beta_RR = 0;
85 |
86 | % =========================================================================
87 | % DOUBLE LANE CHANGE TEST %
88 | % Description: Test is performed at the speed of 80 km/h and maintains that
89 | % speed along the test
90 | % =========================================================================
91 | speed = 80; % [km/h]
92 | steer = 0;
93 | psi = 0;
94 |
95 | % Generating control reference parameters for different test parts
96 | % PART 1 - first straight
97 | [orientationVector timeVector] = generateOrientation(0,0,0,0.34,dt,'step');
98 | % PART 2 - steering to the left
99 | [orientationVector timeVector] = ...
100 | generateOrientation(orientationVector,timeVector,18,0.55,dt,'ramp');
101 | % PART 3 - going straight before turning right to enter into second lane
102 | [orientationVector timeVector] = ...
103 | generateOrientation(orientationVector,timeVector,18,0.065,dt,'step');
104 | % PART 4 - steering to the right to enter second lane
105 | [orientationVector timeVector] = ...
106 | generateOrientation(orientationVector,timeVector,0,0.55,dt,'ramp');
107 | % PART 5 - second straight
108 | [orientationVector timeVector] = ...
109 | generateOrientation(orientationVector,timeVector,0,0.06,dt,'step');
110 | % PART 6 - steering to the right, exiting second straight
111 | [orientationVector timeVector] = ...
112 | generateOrientation(orientationVector,timeVector,-14,0.55,dt,'ramp');
113 | % PART 7 - going straight before turning left to enter into first lane
114 | [orientationVector timeVector] = ...
115 | generateOrientation(orientationVector,timeVector,-14,0.05,dt,'step');
116 | % PART 8 - steering to the left to enter first lane again
117 | [orientationVector timeVector] = ...
118 | generateOrientation(orientationVector,timeVector,0,0.55,dt,'ramp');
119 | % PART 9 - vehicle returned to the first lane, going straight again
120 | [orientationVector timeVector] = ...
121 | generateOrientation(orientationVector,timeVector,0,.45,dt,'step');
122 |
123 | % Mass distribution on each wheel
124 | m1 = m1_s; % Front left
125 | m2 = m2_s; % Front rigth
126 | m3 = m3_s; % Rear left
127 | m4 = m4_s; % Rear right
128 |
129 | % =========================================================================
130 | % Packing all parameters into one vector variable
131 | % Description:
132 | % >> vehicle parameters - length, width, CG, masses, orientation
133 | % >> simulation parameters - initial steering position, max speed, max
134 | % speed of steering...
135 | % >> tire parameters - sleep angle of each wheel
136 | % (FL - front left; FR - front right)
137 | % (RL - rear left; RR - rear right)
138 | % >> wheel location - initial location of CG and vehicle
139 | % orientation
140 | % =========================================================================
141 | vehicle_Params = [L T_front T_rear CG_height a b mass m1_s m2_s m3_s m4_s psi];
142 | sym_Params = [steer(1) speed max_steer max_speed C_alpha g dt];
143 | tire_Params = [beta_FL beta_FR beta_RL beta_RR];
144 | wheel_location = [-a,0];
145 |
146 | % =========================================================================
147 | % INIT START LOCATION
148 | % Description: Calculate initial position of center of gravity (CG), car
149 | % center (CC), position of each wheel
150 | %
151 | % NOTICE: Movement is placed only in xy-plane ! ! !
152 | % =========================================================================
153 | x_CG(1) = 0;
154 | y_CG(1) = 0;
155 |
156 | x_CC(1) = -b*cos(psi(1));
157 | y_CC(1) = -b*sin(psi(1));
158 |
159 | x_FR(1) = x_CG(1)+sqrt(a^2+(T_front/2)^2)*cos(psi(1)-atan((T_front/2)/a));
160 | y_FR(1) = y_CG(1)+sqrt(a^2+(T_front/2)^2)*sin(psi(1)-atan((T_front/2)/a));
161 |
162 | x_RR(1) = x_CG(1)-b*cos(psi(1))+(T_rear/2)*sin(psi(1));
163 | y_RR(1) = y_CG(1)-b*sin(psi(1))-(T_rear/2)*cos(psi(1));
164 |
165 | x_FL(1) = x_FR(1)-T_front*sin(psi(1));
166 | y_FL(1) = y_FR(1)+T_front*cos(psi(1));
167 |
168 | x_RL(1) = x_RR(1)-T_rear*sin(psi(1));
169 | y_RL(1) = y_RR(1)+T_rear*cos(psi(1));
170 |
171 | d_psi = 0; sigma_CG = 0;
172 |
173 | m1 = m1_s; m2 = m2_s;
174 | m3 = m3_s; m4 = m4_s;
175 |
176 | dm_longitudinal = [0; 0];
177 | dm_lateral = [0; 0];
178 |
179 | FL_speed = 0;
180 | FR_speed = 0;
181 | RL_speed = 0;
182 | RR_speed = 0;
183 | wheel_speeds = [FL_speed' FR_speed' RL_speed' RR_speed'];
184 |
185 | acp_CG = 0; acp_psi = 0;
186 |
187 | % =========================================================================
188 | % START SIMULATION
189 | % Description: For specific angles and orientations refer to the figure of
190 | % car model -> (../Figures/Vehicle_angles_newFont.png)
191 | % =========================================================================
192 | time = 0;
193 | e = []; % car orientation error in comparison to the reference
194 | u = []; % steering control
195 | lastState = 0;
196 | for position = 1:length(timeVector)
197 | if((mod(timeVector(position),interrupt))==0)
198 | e(position) = round((orientationVector(position)-psi(position)*180/pi)*1e4)/1e4;
199 | u(position) = Kp*e(position)+Kp*dt*e(position)/Ti;
200 | % u(position) = e(position);
201 |
202 | % ! ! ! Notice ! ! !
203 | % Always saturate max steering angle and steering angle speed
204 | if(position>1)
205 | if(u(position)>0 && u(position-1)>0 &&...
206 | u(position)-u(position-1)>max_Dsteer)
207 |
208 | u(position) = u(position-1)+max_Dsteer;
209 | else if(u(position)>0 && u(position-1)>0 &&...
210 | u(position)-u(position-1)<-max_Dsteer)
211 | u(position) = u(position-1)-max_Dsteer;
212 | end
213 | end
214 | if(u(position)<0 && u(position-1)<0 &&...
215 | u(position)-u(position-1)<-max_Dsteer)
216 |
217 | u(position) = u(position-1)-max_Dsteer;
218 | else if(u(position)<0 && u(position-1)<0 &&...
219 | u(position)-u(position-1)>max_Dsteer)
220 | u(position) = u(position-1)+max_Dsteer;
221 | end
222 | end
223 |
224 | if(u(position)>0 && u(position-1)<0 &&...
225 | u(position)-u(position-1)>max_Dsteer)
226 |
227 | u(position) = u(position-1)+max_Dsteer;
228 | else if(u(position)<0 && u(position-1)>0 &&...
229 | u(position)-u(position-1)<-max_Dsteer)
230 | u(position) = u(position-1)-max_Dsteer;
231 | end
232 | end
233 | else
234 | if(u(position)>max_Dsteer)
235 | u(position) = max_Dsteer;
236 | else if(u(position)<-max_Dsteer)
237 | u(position) = -max_Dsteer;
238 | end
239 | end
240 | end
241 |
242 | if(u(position)>135)
243 | u(position) = 135;
244 | else if(u(position)<-135)
245 | u(position) = -135;
246 | end
247 | end
248 | else
249 | e(position) = e(position-1);
250 | u(position) = Kp*e(position)+Kp*dt*e(position)/Ti;
251 | end
252 | steer = [steer; u(position)];
253 |
254 | % Store new recalculated parameters of the car
255 | vehicle_Params = [L T_front T_rear CG_height a b mass m1(position) m2(position) m3(position) m4(position) psi(position)];
256 | sym_Params = [steer(position) speed(1) max_steer max_speed C_alpha g dt];
257 | tire_Params = [beta_FL(position) beta_FR(position) beta_RL(position) beta_RR(position)];
258 | wheel_location = [x_CG(position) y_CG(position)...
259 | x_FR(position) y_FR(position)...
260 | x_RR(position) y_RR(position)...
261 | x_FL(position) y_FL(position)...
262 | x_RL(position) y_RL(position)];
263 |
264 | % Move the car to the new position
265 | [output lastState] = wheel_move(wheel_speeds,vehicle_Params,sym_Params,tire_Params,wheel_location,slipAngle,lateralLoad,lastState);
266 |
267 | x_FL = [x_FL; output(2,1)]; y_FL = [y_FL; output(2,7)];
268 | x_FR = [x_FR; output(2,2)]; y_FR = [y_FR; output(2,8)];
269 | x_RL = [x_RL; output(2,3)]; y_RL = [y_RL; output(2,9)];
270 | x_RR = [x_RR; output(2,4)]; y_RR = [y_RR; output(2,10)];
271 | x_CG = [x_CG; output(2,5)]; y_CG = [y_CG; output(2,11)];
272 | x_CC = [x_CC; output(2,6)]; y_CC = [y_CC; output(2,12)];
273 |
274 | psi = [psi; output(2,13)]; d_psi = [d_psi; output(2,14)];
275 |
276 | beta_FL = [beta_FL; output(2,15)];
277 | beta_FR = [beta_FR; output(2,16)];
278 | beta_RL = [beta_RL; output(2,17)];
279 | beta_RR = [beta_RR; output(2,18)];
280 |
281 | sigma_CG = [sigma_CG; output(2,19)]; %time = [time; output(2,20)];
282 |
283 | m1 = [m1; output(2,21)]; m2 = [m2; output(2,22)];
284 | m3 = [m3; output(2,23)]; m4 = [m4; output(2,24)];
285 | dm_longitudinal = [dm_longitudinal output(:,27)];
286 | dm_lateral = [dm_lateral -output(:,28)];
287 |
288 | FL_speed = [FL_speed output(2,29)/WHEEL_DIAMETER];
289 | FR_speed = [FR_speed output(2,30)/WHEEL_DIAMETER];
290 | RL_speed = [RL_speed output(2,31)/WHEEL_DIAMETER];
291 | RR_speed = [RR_speed output(2,32)/WHEEL_DIAMETER];
292 | wheel_speeds = [FL_speed(end) FR_speed(end) RL_speed(end) RR_speed(end)];
293 |
294 | acp_CG = [acp_CG; output(2,25)]; acp_psi = [acp_psi; output(2,26)];
295 | time = [time time(end)+dt];
296 | end
297 |
298 | wheel_speeds = [FL_speed' FR_speed' RL_speed' RR_speed'];
299 |
300 | x = [x_FL x_FR x_RL x_RR x_CG x_CC];
301 | y = [y_FL y_FR y_RL y_RR y_CG y_CC];
302 |
303 | m = [m1 m2 m3 m4 mass.*ones(length(time),1) dm_lateral' dm_longitudinal']; % size = length(time) x (4+1+2+2)
304 | beta = [beta_FL beta_FR beta_RL beta_RR];
305 |
306 | vehicle_Params = [L T_front T_rear CG_height a b g speed dt];
307 | tire_Params = [C_alpha WHEEL_DIAMETER];
308 |
309 | orientationVector = [orientationVector; orientationVector(end)];
310 | timeVector = [timeVector; timeVector(end)];
311 |
312 | % Pack all the data and prepare to plot
313 | data = [x y m beta wheel_speeds psi d_psi acp_psi acp_CG sigma_CG steer time' orientationVector timeVector];
314 | disp(['Total time for ISO-standard test: ', num2str(max(time)),'s.']);
315 | disp(['Distance: ', num2str(max(x_CG)),'m.']);
316 | disp(['Max lateral G: ', num2str(max(acp_CG)/g),'G.']);
317 |
318 | % Plot the Double Lane Change Test executed simulation
319 | plotData(data,vehicle_Params,tire_Params,'DLC');
--------------------------------------------------------------------------------
/Matlab/wheel_move.m:
--------------------------------------------------------------------------------
1 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
2 | %
3 | % Copyright (c) *
4 | % All rights reserved by Milan Tepic
5 | %
6 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
7 | %
8 | % Function: wheel_move
9 | % Input parameteres:
10 | % - wheel_speeds >> Angular speed of each wheel generated from previous simulations (currently unused so far, since the control of vehicle is not implemented to control wheels, only steering wheel). For such improvements, it is needed to add momentum equations about load and speed of each wheel over the whole system (vehicle). System is already too non-linear, therefor this was not implemented due to deadline to finish final Bachelor thesis. This is one of the following steps of improvements.
11 | % - vehicle_Params >>
12 | % - sym_Params >>
13 | % - tire_Params >>
14 | % - wheel_location >>
15 | % - slipAngle >>
16 | % - lateralLoad >>
17 | % - laststate >>
18 | % Return parameteres:
19 | % - output << new generated states and dynamical parameters used in the next iteration
20 | % - state_Num << {0,1,2} <=> {'straight', 'left', 'right'}
21 | %
22 | %
23 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
24 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
25 | %
26 | %
27 | % DESCRIPTION
28 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
29 | %
30 | % Calculates movement of each wheel separatelly according
31 | % to the vehicle geometry and different parameters.
32 | %
33 | %
34 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
35 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
36 | %
37 | %
38 | % HISTORY
39 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
40 | % Version: 1.7
41 | % Author/Date: Milan Tepic / 2017-02-07
42 | % Change: Initial version
43 | %
44 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
45 | % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
46 |
47 | function [output,state_Num] = wheel_move(wheel_speeds,vehicle_Params,sym_Params,tire_Params,wheel_location,slipAngle,lateralLoad,laststate)
48 |
49 | % INIT
50 | x_CC = []; y_CC = []; x_FC = []; y_FC = []; R_FC = [];
51 | sigma_CG = []; v_tan = []; omega = []; d_psi = [];
52 | acp_CG = []; acp_psi = [];
53 | dm_lateral_front = []; dm_lateral_rear = [];
54 | dm_longitudinal_front = []; dm_longitudinal_rear = [];
55 |
56 | x_start = wheel_location(1);
57 | y_start = wheel_location(2);
58 |
59 | L = vehicle_Params(1);
60 | T_front = vehicle_Params(2);
61 | T_rear = vehicle_Params(3);
62 | CG_height = vehicle_Params(4);
63 | a = vehicle_Params(5);
64 | b = vehicle_Params(6);
65 | mass = vehicle_Params(7);
66 | m1 = vehicle_Params(8);
67 | m2 = vehicle_Params(9);
68 | m3 = vehicle_Params(10);
69 | m4 = vehicle_Params(11);
70 | psi = vehicle_Params(12);
71 |
72 | steer = sym_Params(1);
73 | speed = sym_Params(2);
74 | max_steer = sym_Params(3);
75 | max_speed = sym_Params(4);
76 | C_alpha = sym_Params(5);
77 | g = sym_Params(6);
78 | dt = sym_Params(7);
79 |
80 | beta_FL = tire_Params(1);
81 | beta_FR = tire_Params(2);
82 | beta_RL = tire_Params(3);
83 | beta_RR = tire_Params(4);
84 |
85 | m1_s = mass*(b/L)/2; % [kg]
86 | m2_s = mass*(b/L)/2; % [kg]
87 | m3_s = mass*(a/L)/2; % [kg]
88 | m4_s = mass*(a/L)/2; % [kg]
89 |
90 | % TELEMETRY
91 | v = speed*1000/3600;
92 | delta = steer*pi/180;
93 |
94 | sigma_FL = 0;
95 | sigma_FR = 0;
96 | sigma_RR = 0;
97 | sigma_RL = 0;
98 |
99 | k_F = 0; n_F = 0;
100 | k_R = 0; n_R = 0;
101 |
102 | x_CG = wheel_location(1);
103 | y_CG = wheel_location(2);
104 |
105 | x_FR = wheel_location(3);
106 | y_FR = wheel_location(4);
107 |
108 | x_RR = wheel_location(5);
109 | y_RR = wheel_location(6);
110 |
111 | x_FL = wheel_location(7);
112 | y_FL = wheel_location(8);
113 |
114 | x_RL = wheel_location(9);
115 | y_RL = wheel_location(10);
116 |
117 | v_frontLeft = wheel_speeds(1);
118 | v_frontRight = wheel_speeds(2);
119 | v_rearLeft = wheel_speeds(3);
120 | v_rearRight = wheel_speeds(4);
121 |
122 | dw = 20;
123 |
124 | wheel_speeds = [wheel_speeds; wheel_speeds];
125 |
126 | counter = 1;
127 |
128 | if(delta(counter)>0 || laststate==1)
129 | if(T_front>=T_rear)
130 | x_FR = L; y_FR = 0;
131 | x_RR = 0; y_RR = (T_front-T_rear)/2;
132 |
133 | x_FL = L; y_FL = T_front;
134 | x_RL = 0; y_RL = T_rear+(T_front-T_rear)/2;
135 |
136 | x_G = b; y_G = T_front/2;
137 | else
138 | x_FR = L; y_FR = (T_rear-T_front)/2;
139 | x_RR = 0; y_RR = 0;
140 |
141 | x_FL = L; y_FL = T_front+(T_front-T_rear)/2;
142 | x_RL = 0; y_RL = T_rear;
143 |
144 | x_G = b; y_G = T_rear/2;
145 | end
146 |
147 | state = 'left';
148 | if(laststate~=0)
149 | state_Num = 1;
150 | else
151 | state_Num = 0;
152 | end
153 | m_FL = m1(counter);
154 | m_FR = m2(counter);
155 | m_RL = m3(counter);
156 | m_RR = m4(counter);
157 |
158 | sigma_FL(counter) = delta(counter)-beta_FL(counter);
159 | sigma_FR(counter) = delta(counter)-beta_FR(counter);
160 | sigma_RL(counter) = -beta_RL(counter);
161 | sigma_RR(counter) = -beta_RR(counter);
162 |
163 | k_R(counter) = tan(sigma_RR(counter)-pi/2);
164 | n_R(counter) = y_RR-x_RR*k_R(counter);
165 |
166 | k_F(counter) = tan(sigma_FR(counter)-pi/2);
167 | n_F(counter) = y_FR-x_FR*k_F(counter);
168 |
169 | x_CC(counter) = (n_F(counter)-n_R(counter))/(k_R(counter)-k_F(counter));
170 | y_CC(counter) = x_CC(counter)*k_F(counter)+n_F(counter);
171 |
172 | x_FC(counter) = x_CC(counter);
173 | y_FC(counter) = y_CG(counter);
174 |
175 | R_FC(counter) = y_FC(counter)-y_CC(counter);
176 | sigma_CG(counter) = atan((x_G-x_CC)/(y_CC-y_G));
177 |
178 |
179 | R_FR = sqrt((y_FR-y_CC(counter))^2+(x_FR-x_CC(counter))^2);
180 | R_RR = sqrt((y_RR-y_CC(counter))^2+(x_RR-x_CC(counter))^2);
181 |
182 | R_FL = sqrt((y_FL-y_CC(counter))^2+(x_FL-x_CC(counter))^2);
183 | R_RL = sqrt((y_RL-y_CC(counter))^2+(x_RL-x_CC(counter))^2);
184 |
185 | R_CG = sqrt((y_G-y_CC(counter))^2+(x_G-x_CC(counter))^2);
186 |
187 | %v_tan(counter) = v_frontRight*R_CG/R_FR;
188 |
189 | v_tan(counter) = v/cos(sigma_CG(counter));
190 | omega(counter) = v_tan(counter)/R_CG;
191 | d_psi(counter) = omega(counter)*dt;
192 | d_S = R_CG*d_psi(counter);
193 | dx_CG = d_S*cos(sigma_CG(counter)+d_psi(counter));
194 | dy_CG = d_S*sin(sigma_CG(counter)+d_psi(counter));
195 |
196 | v_frontLeft = v_tan(counter)*R_FL/R_CG;
197 | v_rearLeft = v_tan(counter)*R_RL/R_CG;
198 |
199 | v_frontRight = v_tan(counter)*R_FR/R_CG;
200 | v_rearRight = v_tan(counter)*R_RR/R_CG;
201 |
202 | F_fl = (m_FL*v_frontLeft^2/R_FL);
203 | if(F_fl>=min(lateralLoad) && F_fl<=max(lateralLoad))
204 | position = find(lateralLoad<=F_fl);
205 | slipFrontLeft = slipAngle(position(end));
206 | else if(F_fl>max(lateralLoad))
207 | slipFrontLeft = max(slipAngle);
208 | else
209 | slipFrontLeft = min(slipAngle);
210 | end
211 | end
212 | beta_FL(counter+1) = slipFrontLeft*pi/180;
213 |
214 | F_fr = (m_FR*v_frontRight^2/R_FR);
215 | if(F_fr>=min(lateralLoad) && F_fr<=max(lateralLoad))
216 | position = find(lateralLoad<=F_fr);
217 | slipFrontRight = slipAngle(position(end));
218 | else if(F_fr>max(lateralLoad))
219 | slipFrontRight = max(slipAngle);
220 | else
221 | slipFrontRight = min(slipAngle);
222 | end
223 | end
224 | beta_FR(counter+1) = slipFrontRight*pi/180;
225 |
226 | F_rl = (m_RL*v_rearLeft^2/R_RL);
227 | if(F_rl>=min(lateralLoad) && F_rl<=max(lateralLoad))
228 | position = find(lateralLoad<=F_rl);
229 | slipRearLeft = slipAngle(position(end));
230 | else if(F_rl>max(lateralLoad))
231 | slipRearLeft = max(slipAngle);
232 | else
233 | slipRearLeft = min(slipAngle);
234 | end
235 | end
236 | beta_RL(counter+1) = slipRearLeft*pi/180;
237 |
238 | F_rr = (m_RR*v_rearRight^2/R_RR);
239 | if(F_rr>=min(lateralLoad) && F_rr<=max(lateralLoad))
240 | position = find(lateralLoad<=F_rr);
241 | slipRearRight = slipAngle(position(end));
242 | else if(F_rr>max(lateralLoad))
243 | slipRearRight = max(slipAngle);
244 | else
245 | slipRearRight = min(slipAngle);
246 | end
247 | end
248 | beta_RR(counter+1) = slipRearRight*pi/180;
249 |
250 | psi(counter+1) = psi(counter)+d_psi(counter);
251 | x_CG(counter+1) = x_CG(counter)+dx_CG*cos(psi(counter+1))-dy_CG*sin(psi(counter+1));
252 | y_CG(counter+1) = y_CG(counter)+dx_CG*sin(psi(counter+1))+dy_CG*cos(psi(counter+1));
253 |
254 | x_FR(counter+1) = x_CG(counter+1)+sqrt(a^2+(T_front/2)^2)*cos(psi(counter+1)-atan((T_front/2)/a));
255 | y_FR(counter+1) = y_CG(counter+1)+sqrt(a^2+(T_front/2)^2)*sin(psi(counter+1)-atan((T_front/2)/a));
256 |
257 | % x_RR(counter+1) = x_FR(counter+1)-L*cos(psi(counter+1));
258 | % y_RR(counter+1) = y_FR(counter+1)-L*sin(psi(counter+1));
259 |
260 | x_RR(counter+1) = x_CG(counter+1)-b*cos(psi(counter+1))+(T_rear/2)*sin(psi(counter+1));
261 | y_RR(counter+1) = y_CG(counter+1)-b*sin(psi(counter+1))-(T_rear/2)*cos(psi(counter+1));
262 |
263 | x_FL(counter+1) = x_FR(counter+1)-T_front*sin(psi(counter+1));
264 | y_FL(counter+1) = y_FR(counter+1)+T_front*cos(psi(counter+1));
265 |
266 | x_RL(counter+1) = x_RR(counter+1)-T_rear*sin(psi(counter+1));
267 | y_RL(counter+1) = y_RR(counter+1)+T_rear*cos(psi(counter+1));
268 |
269 | else if(delta(counter)<0 || laststate==2)
270 |
271 | if(T_front>=T_rear)
272 | x_FR = L; y_FR = 0;
273 | x_RR = 0; y_RR = (T_front-T_rear)/2;
274 |
275 | x_FL = L; y_FL = T_front;
276 | x_RL = 0; y_RL = T_rear+(T_front-T_rear)/2;
277 |
278 | x_G = b; y_G = T_front/2;
279 | else
280 | x_FR = L; y_FR = (T_rear-T_front)/2;
281 | x_RR = 0; y_RR = 0;
282 |
283 | x_FL = L; y_FL = T_front+(T_front-T_rear)/2;
284 | x_RL = 0; y_RL = T_rear;
285 |
286 | x_G = b; y_G = T_rear/2;
287 | end
288 |
289 | state = 'right';
290 | if(laststate~=0)
291 | state_Num = 2;
292 | else
293 | state_Num = 0;
294 | end
295 | m_FL = m1(counter);
296 | m_FR = m2(counter);
297 | m_RL = m3(counter);
298 | m_RR = m4(counter);
299 |
300 | sigma_FL(counter) = delta(counter)+beta_FL(counter);
301 | sigma_RL(counter) = beta_RL(counter);
302 |
303 | k_R(counter) = tan(sigma_RL(counter)-pi/2);
304 | n_R(counter) = y_RL-x_RL*k_R(counter);
305 |
306 | k_F(counter) = tan(sigma_FL(counter)-pi/2);
307 | n_F(counter) = y_FL-x_FL*k_F(counter);
308 |
309 | x_CC(counter) = (n_F(counter)-n_R(counter))/(k_R(counter)-k_F(counter));
310 | y_CC(counter) = x_CC(counter)*k_F(counter)+n_F(counter);
311 |
312 | x_FC(counter) = x_CC(counter);
313 | y_FC(counter) = y_CG(counter);
314 |
315 | R_FC(counter) = y_FC(counter)-y_CC(counter);
316 | sigma_CG(counter) = atan((x_G(counter)-x_CC(counter))/(y_CC(counter)-y_G(counter)));
317 |
318 | R_FL = sqrt((y_FL-y_CC(counter))^2+(x_FL-x_CC(counter))^2);
319 | R_RL = sqrt((y_RL-y_CC(counter))^2+(x_RL-x_CC(counter))^2);
320 |
321 | R_FR = sqrt((y_FR-y_CC(counter))^2+(x_FR-x_CC(counter))^2);
322 | R_RR = sqrt((y_RR-y_CC(counter))^2+(x_RR-x_CC(counter))^2);
323 |
324 | R_CG = sqrt((y_G-y_CC(counter))^2+(x_G-x_CC(counter))^2);
325 |
326 | v_tan(counter) = v/cos(sigma_CG(counter));
327 | omega(counter) = v_tan(counter)/R_CG;
328 | d_psi(counter) = -omega(counter)*dt;
329 | d_S = R_CG*d_psi(counter); %*sign(delta(counter));
330 | dx_CG = -d_S*cos(sigma_CG(counter)+d_psi(counter));
331 | dy_CG = d_S*sin(sigma_CG(counter)+d_psi(counter));
332 |
333 | v_frontLeft = v_tan(counter)*R_FL/R_CG;
334 | v_rearLeft = v_tan(counter)*R_RL/R_CG;
335 |
336 | v_frontRight = v_tan(counter)*R_FR/R_CG;
337 | v_rearRight = v_tan(counter)*R_RR/R_CG;
338 |
339 | F_fl = (m_FL*v_frontLeft^2/R_FL);
340 | if(F_fl>=min(lateralLoad) && F_fl<=max(lateralLoad))
341 | position = find(lateralLoad<=F_fl);
342 | slipFrontLeft = slipAngle(position(end));
343 | else if(F_fl>max(lateralLoad))
344 | slipFrontLeft = max(slipAngle);
345 | else
346 | slipFrontLeft = min(slipAngle);
347 | end
348 | end
349 | beta_FL(counter+1) = slipFrontLeft*pi/180;
350 |
351 | F_fr = (m_FR*v_frontRight^2/R_FR);
352 | if(F_fr>=min(lateralLoad) && F_fr<=max(lateralLoad))
353 | position = find(lateralLoad<=F_fr);
354 | slipFrontRight = slipAngle(position(end));
355 | else if(F_fr>max(lateralLoad))
356 | slipFrontRight = max(slipAngle);
357 | else
358 | slipFrontRight = min(slipAngle);
359 | end
360 | end
361 | beta_FR(counter+1) = slipFrontRight*pi/180;
362 |
363 | F_rl = (m_RL*v_rearLeft^2/R_RL);
364 | if(F_rl>=min(lateralLoad) && F_rl<=max(lateralLoad))
365 | position = find(lateralLoad<=F_rl);
366 | slipRearLeft = slipAngle(position(end));
367 | else if(F_rl>max(lateralLoad))
368 | slipRearLeft = max(slipAngle);
369 | else
370 | slipRearLeft = min(slipAngle);
371 | end
372 | end
373 | beta_RL(counter+1) = slipRearLeft*pi/180;
374 |
375 | F_rr = (m_RR*v_rearRight^2/R_RR);
376 | if(F_rr>=min(lateralLoad) && F_rr<=max(lateralLoad))
377 | position = find(lateralLoad<=F_rr);
378 | slipRearRight = slipAngle(position(end));
379 | else if(F_rr>max(lateralLoad))
380 | slipRearRight = max(slipAngle);
381 | else
382 | slipRearRight = min(slipAngle);
383 | end
384 | end
385 | beta_RR(counter+1) = slipRearRight*pi/180;
386 |
387 | psi(counter+1) = psi(counter)+d_psi(counter);
388 | x_CG(counter+1) = x_CG(counter)+dx_CG*cos(psi(counter+1))-dy_CG*sin(psi(counter+1));
389 | y_CG(counter+1) = y_CG(counter)+dx_CG*sin(psi(counter+1))+dy_CG*cos(psi(counter+1));
390 |
391 | x_FR(counter+1) = x_CG(counter+1)+sqrt(a^2+(T_front/2)^2)*cos(psi(counter+1)-atan((T_front/2)/a));
392 | y_FR(counter+1) = y_CG(counter+1)+sqrt(a^2+(T_front/2)^2)*sin(psi(counter+1)-atan((T_front/2)/a));
393 |
394 | % x_RR(counter+1) = x_FR(counter+1)-L*cos(psi(counter+1));
395 | % y_RR(counter+1) = y_FR(counter+1)-L*sin(psi(counter+1));
396 |
397 | x_RR(counter+1) = x_CG(counter+1)-b*cos(psi(counter+1))+(T_rear/2)*sin(psi(counter+1));
398 | y_RR(counter+1) = y_CG(counter+1)-b*sin(psi(counter+1))-(T_rear/2)*cos(psi(counter+1));
399 |
400 | x_FL(counter+1) = x_FR(counter+1)-T_front*sin(psi(counter+1));
401 | y_FL(counter+1) = y_FR(counter+1)+T_front*cos(psi(counter+1));
402 |
403 | x_RL(counter+1) = x_RR(counter+1)-T_rear*sin(psi(counter+1));
404 | y_RL(counter+1) = y_RR(counter+1)+T_rear*cos(psi(counter+1));
405 |
406 | else
407 | state = 'straight';
408 | state_Num = 0;
409 |
410 | sigma_FL(counter)=0;
411 | sigma_FR(counter)=0;
412 | sigma_RL(counter)=0;
413 | sigma_RR(counter)=0;
414 |
415 | x_CC(counter) = 0;
416 | y_CC(counter) = 0;
417 |
418 | x_FC(counter) = x_CG(counter);
419 | y_FC(counter) = y_CG(counter);
420 |
421 | sigma_CG(counter) = 0;
422 |
423 | R_CG = 0;
424 | v_tan(counter) = v;
425 | omega(counter) = 0;
426 | d_psi(counter) = 0;
427 | d_S = v_tan(counter)*dt;
428 | dx_CG = d_S*cos(psi(counter));
429 | dy_CG = d_S*sin(psi(counter));
430 |
431 | R_F = 0;
432 | R_R = 0;
433 | v_frontLeft = v_tan(counter);
434 | v_frontRight = v_tan(counter);
435 | v_rearLeft = v_tan(counter);
436 | v_rearRight = v_tan(counter);
437 |
438 | beta_FL(counter+1) = 0;
439 | beta_FR(counter+1) = 0;
440 | beta_RL(counter+1) = 0;
441 | beta_RR(counter+1) = 0;
442 |
443 | psi(counter+1) = psi(counter);
444 | x_CG(counter+1) = x_CG(counter)+dx_CG;
445 | y_CG(counter+1) = y_CG(counter)+dy_CG;
446 |
447 | x_FR(counter+1) = x_CG(counter+1)+sqrt(a^2+(T_front/2)^2)*cos(psi(counter+1)-atan((T_front/2)/a));
448 | y_FR(counter+1) = y_CG(counter+1)+sqrt(a^2+(T_front/2)^2)*sin(psi(counter+1)-atan((T_front/2)/a));
449 |
450 | x_RR(counter+1) = x_CG(counter+1)-b*cos(psi(counter+1))+(T_rear/2)*sin(psi(counter+1));
451 | y_RR(counter+1) = y_CG(counter+1)-b*sin(psi(counter+1))-(T_rear/2)*cos(psi(counter+1));
452 |
453 | x_FL(counter+1) = x_FR(counter+1)-T_front*sin(psi(counter+1));
454 | y_FL(counter+1) = y_FR(counter+1)+T_front*cos(psi(counter+1));
455 |
456 | x_RL(counter+1) = x_RR(counter+1)-T_rear*sin(psi(counter+1));
457 | y_RL(counter+1) = y_RR(counter+1)+T_rear*cos(psi(counter+1));
458 | end
459 | end
460 |
461 | if(R_CG~=0)
462 | acp_CG(counter) = v_tan(counter)^2/R_CG;
463 | else
464 | acp_CG(counter) = 0;
465 | end
466 | acp_psi(counter) = sigma_CG(counter)+pi/2*(-sign(delta(counter)));
467 |
468 | %dm_lateral(counter) = (mass*(acp_CG(counter)/g)*sin(acp_psi(counter)))/2;
469 | %dm_longitudinal(counter) = (mass*(acp_CG(counter)/g)*abs(cos(acp_psi(counter))))/2;
470 |
471 | %dm_lateral_front(counter) = (-sign(delta(counter))*mass*acp_CG(counter)*abs(sin(acp_psi(counter)))*CG_height/T_front)/g;
472 | %dm_lateral_rear(counter) = (-sign(delta(counter))*mass*acp_CG(counter)*abs(sin(acp_psi(counter)))*CG_height/T_rear)/g;
473 | %dm_longitudinal_front(counter) = (mass*acp_CG(counter)*cos(acp_psi(counter))*CG_height/a)/g;
474 | %dm_longitudinal_rear(counter) = (-mass*acp_CG(counter)*cos(acp_psi(counter))*CG_height/b)/g;
475 |
476 | load_direction = -sign(delta(counter));
477 | arb_front = 1;
478 | arb_rear = 1;
479 |
480 | dm_lateral_front(counter) = (acp_CG(counter)*abs(sin(acp_psi(counter)))*CG_height/T_front)/g;
481 | dm_lateral_front(counter) = dm_lateral_front(counter)*load_direction;
482 | if(dm_lateral_front(counter)>0.5)
483 | dm_lateral_front(counter)=0.5;
484 | else if(dm_lateral_front(counter)<-0.5)
485 | dm_lateral_front(counter)=-0.5;
486 | end
487 | end
488 |
489 | dm_lateral_rear(counter) = (acp_CG(counter)*abs(sin(acp_psi(counter)))*CG_height/T_rear)/g;
490 | dm_lateral_rear(counter) = dm_lateral_rear(counter)*load_direction;
491 | if(dm_lateral_rear(counter)>0.5)
492 | dm_lateral_rear(counter)=0.5;
493 | else if(dm_lateral_rear(counter)<-0.5)
494 | dm_lateral_rear(counter)=-0.5;
495 | end
496 | end
497 |
498 | dm_longitudinal_front(counter) = b/L*(-acp_CG(counter)*cos(acp_psi(counter))*CG_height/L)/g;
499 | dm_longitudinal_rear(counter) = a/L*(acp_CG(counter)*cos(acp_psi(counter))*CG_height/L)/g;
500 |
501 | % dm_longitudinal_front(counter) = (acp_CG(counter)*abs(cos(acp_psi(counter)+pi/2))*CG_height/L)/g;
502 | % if(dm_longitudinal_front(counter)>0.5)
503 | % dm_longitudinal_front(counter)=0.5;
504 | % else if(dm_longitudinal_front(counter)<-0.5)
505 | % dm_longitudinal_front(counter)=-0.5;
506 | % end
507 | % end
508 | % dm_longitudinal_rear(counter) = -dm_longitudinal_front(counter);
509 |
510 | m1(counter+1) = (0.5+dm_lateral_front(counter))*arb_front*(m1_s+m2_s)+mass*dm_longitudinal_front(counter);
511 | m2(counter+1) = (0.5-dm_lateral_front(counter))*arb_front*(m1_s+m2_s)+mass*dm_longitudinal_front(counter);
512 | m3(counter+1) = (0.5+dm_lateral_rear(counter))*arb_rear*(m3_s+m4_s)+mass*dm_longitudinal_rear(counter);
513 | m4(counter+1) = (0.5-dm_lateral_rear(counter))*arb_rear*(m3_s+m4_s)+mass*dm_longitudinal_rear(counter);
514 |
515 | % da li i lateral treba ovde deliti sa dva o.O
516 | % m1(counter+1) = (0.5+dm_lateral_front(counter))*arb_front*(m1_s+m2_s)+dm_longitudinal_front(counter)*m1_s;
517 | % m2(counter+1) = (0.5-dm_lateral_front(counter))*arb_front*(m1_s+m2_s)+dm_longitudinal_front(counter)*m2_s;
518 | % m3(counter+1) = (0.5+dm_lateral_rear(counter))*arb_rear*(m3_s+m4_s)+dm_longitudinal_rear(counter)*m3_s;
519 | % m4(counter+1) = (0.5-dm_lateral_rear(counter))*arb_rear*(m3_s+m4_s)+dm_longitudinal_rear(counter)*m4_s;
520 |
521 | if(m1(counter+1)<1)
522 | m1(counter+1) = 1;
523 | end
524 | if(m2(counter+1)<1)
525 | m2(counter+1) = 1;
526 | end
527 | if(m3(counter+1)<1)
528 | m3(counter+1) = 1;
529 | end
530 | if(m4(counter+1)<1)
531 | m4(counter+1) = 1;
532 | end
533 |
534 | if(m1(counter+1)>mass/2-1)
535 | m1(counter+1) = mass/2-1;
536 | end
537 | if(m2(counter+1)>mass/2-1)
538 | m2(counter+1) = mass/2-1;
539 | end
540 | if(m3(counter+1)>mass/2-1)
541 | m3(counter+1) = mass/2-1;
542 | end
543 | if(m4(counter+1)>mass/2-1)
544 | m4(counter+1) = mass/2-1;
545 | end
546 |
547 | sigma_CG = [sigma_CG sigma_CG(end)];
548 | k_F = [k_F k_F(end)];
549 | k_R = [k_R k_R(end)];
550 |
551 | x_CC = [0 x_CC];
552 | y_CC = [0 y_CC];
553 | d_psi = [0 d_psi];
554 |
555 | x = [x_FL' x_FR' x_RL' x_RR' x_CG' x_CC'];
556 | y = [y_FL' y_FR' y_RL' y_RR' y_CG' y_CC'];
557 | beta = [beta_FL' beta_FR' beta_RL' beta_RR'];
558 |
559 | acp_CG = [0 acp_CG]; acp_psi = [0 acp_psi];
560 | dm_longitudinal = [dm_longitudinal_front dm_longitudinal_rear];
561 | dm_lateral = [dm_lateral_front dm_lateral_rear];
562 |
563 | masses = [m1' m2' m3' m4'];
564 |
565 | if(k_R(end)>0)
566 | dt = 0;
567 | end
568 |
569 | wheel_speeds(2,:) = [v_frontLeft v_frontRight v_rearLeft v_rearRight];
570 |
571 | output = [x y psi' d_psi' beta sigma_CG' [0 dt]' masses acp_CG' acp_psi' dm_longitudinal' dm_lateral' wheel_speeds];
572 | end
--------------------------------------------------------------------------------
/Matlab/wheel_speeds.mat:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Matlab/wheel_speeds.mat
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # A model of sport vehicle handling with 4 wheel electric drivetrain
2 | ## Final Bachelor Thesis
3 |
4 | Vehicle Model is based on the vehicle of Road Arrow Formula Student Team from University of Belgrade, Serbia
5 |
6 | Upcoming years will bring radical changes to how we view commuting and traveling. Electric cars and self-driving vehicles are stepping in. In order to keep up with the future in the fast lane, we have to put ourselves in a position of the engineer of the future and be part of that inevitable change. This does not mean to only rehash existing ideas, but also build on them and improve them ourselves. This article is about my work and approach to the solution of one of the major parts of any type of a vehicle so far – TORQUE VECTORING development. My solution was designed for a 4 wheel electric (sport) car.
7 |
8 |  9 |
10 | During my time as a Formula Student member of [Formula Student Road Arrow Team University of Belgrade](http://stt.org.rs/), I had a great time with developing electronics for a combustion car. During that time, we came up with the project of an electric vehicle for the same competition. My goal was to develop a base for a Torque Vectoring algorithm. Most algorithms that I have read are based on real time data sensoring without pre-model. Since our team hadn’t had a sufficient amount of funding to start building a car right away, I started making a physical-mathematical model of the car's behavior. This was my final thesis for my BSc. A model of sport vehicle handling with 4 wheel electric drivetrain. All simulations and implementations have been conducted using Matlab.
11 |
12 | All vehicles modeling starts with a bicycle model. This is very good if we consider a car traveling at a low speed, or to be more precise, taking corners at a low speed. But, in the motosport world, we drive totally opposite – finding a perfect racing line, late braking, starting acceleration from apex etc. Therefore, the car reaches its boundaries. So, I started my model with 2 parallel bicycles which are hard connected. One is for the left side of the car and the second is for the right. I have introduced this approach since it will include weight (mass) transfer and a slip angle. So, the center of the corner will not be aligned with the rear axle, but somewhere towards the middle. Since, outer wheels have more grip during cornering due to higher weight caused by weight transfer and lateral forces, they dictate car handling during cornering. That is the reason for having two bicycle models.
13 |
14 | 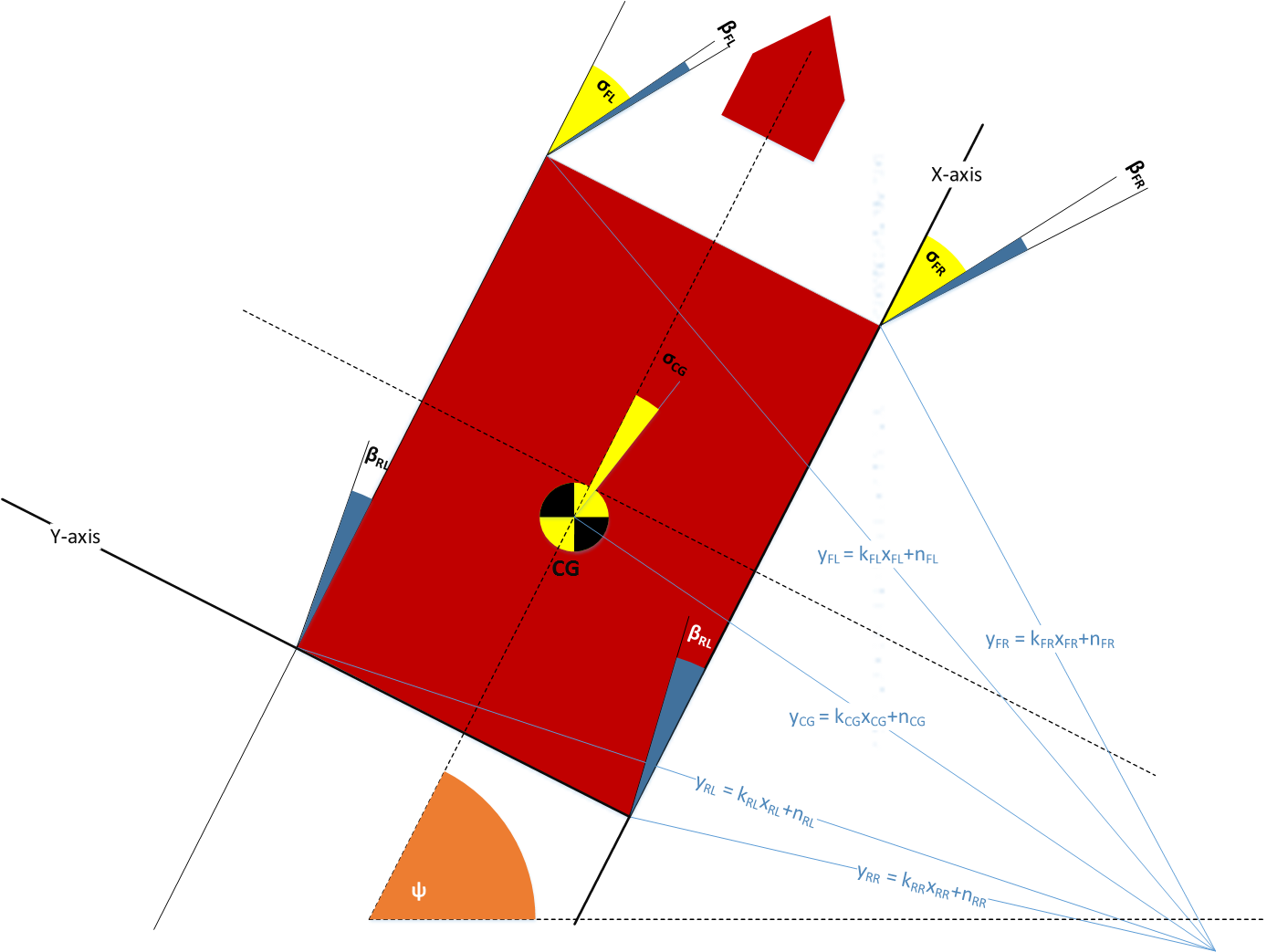
15 |
16 | As seen on the previous picture, the car is driving to the right so the front left wheel, or more precisely the front left tire’s grip and slip, will dictate cornering and the car’s handling. Due to this fact, all calculations will be calculated according to this side of the car, and the right side wheels’ behavior is derived from these calculations. Same applies vice verse for the left hand corner. Parameters are explained as follows:
17 |
18 | Parameters: R - diameter of the curve L - base length δ - steering angle Ψ - yaw β - slip angle α - difference in angles δ(t)- β(t) (xcm, ycm) - coordinates of the vehicles center of mass
19 |
20 | As it is known, tires' contact patch is the only part that interacts with the ground and makes a car go forward (or sideways). Well, this happens when the tire exceeds its lateral force grip and starts to slide. Best racing drivers are able to feel when the car is at its (tire’s) limit and they drive at the maximum slip angle during cornering, moving the pivot point (center of the curve) towards the middle. Unfortunately, tires’ slip angle can be only approximately calculated during racing, but tires factories provide test results of their tires’ slip angle.
21 |
22 | Implementing slip angle and weight transfer influence inside of my algorithm, the results are shown in the following picture:
23 |
24 | 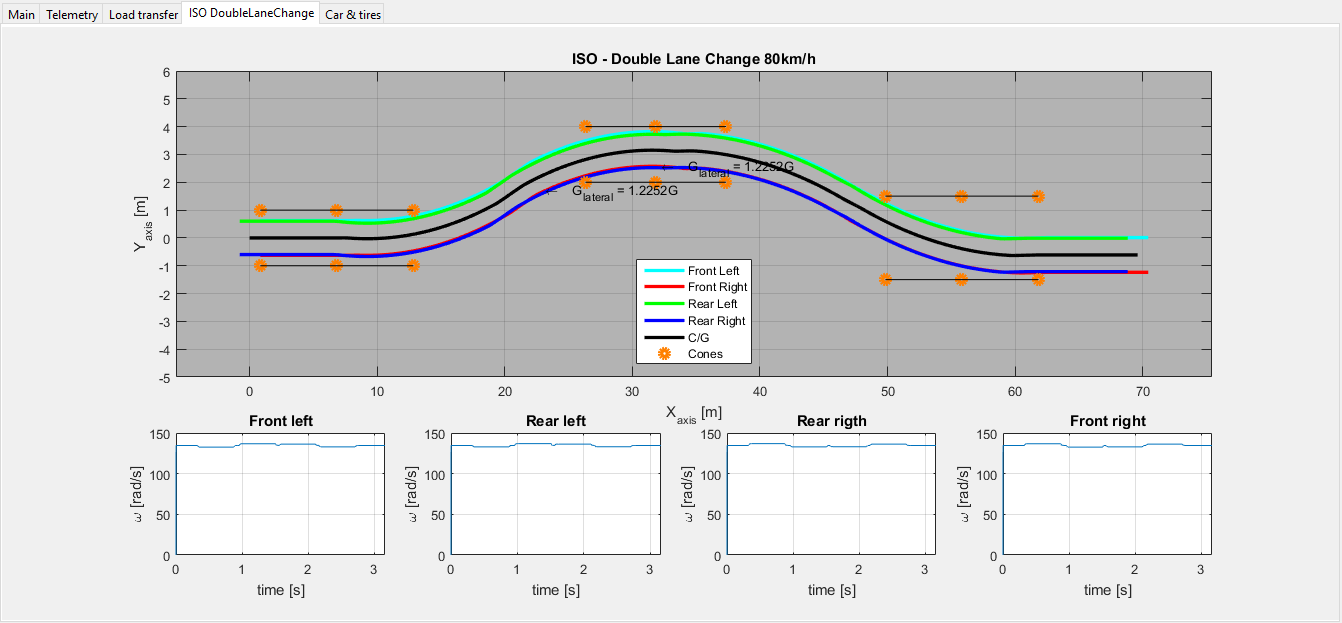
25 |
26 |
9 |
10 | During my time as a Formula Student member of [Formula Student Road Arrow Team University of Belgrade](http://stt.org.rs/), I had a great time with developing electronics for a combustion car. During that time, we came up with the project of an electric vehicle for the same competition. My goal was to develop a base for a Torque Vectoring algorithm. Most algorithms that I have read are based on real time data sensoring without pre-model. Since our team hadn’t had a sufficient amount of funding to start building a car right away, I started making a physical-mathematical model of the car's behavior. This was my final thesis for my BSc. A model of sport vehicle handling with 4 wheel electric drivetrain. All simulations and implementations have been conducted using Matlab.
11 |
12 | All vehicles modeling starts with a bicycle model. This is very good if we consider a car traveling at a low speed, or to be more precise, taking corners at a low speed. But, in the motosport world, we drive totally opposite – finding a perfect racing line, late braking, starting acceleration from apex etc. Therefore, the car reaches its boundaries. So, I started my model with 2 parallel bicycles which are hard connected. One is for the left side of the car and the second is for the right. I have introduced this approach since it will include weight (mass) transfer and a slip angle. So, the center of the corner will not be aligned with the rear axle, but somewhere towards the middle. Since, outer wheels have more grip during cornering due to higher weight caused by weight transfer and lateral forces, they dictate car handling during cornering. That is the reason for having two bicycle models.
13 |
14 | 
15 |
16 | As seen on the previous picture, the car is driving to the right so the front left wheel, or more precisely the front left tire’s grip and slip, will dictate cornering and the car’s handling. Due to this fact, all calculations will be calculated according to this side of the car, and the right side wheels’ behavior is derived from these calculations. Same applies vice verse for the left hand corner. Parameters are explained as follows:
17 |
18 | Parameters: R - diameter of the curve L - base length δ - steering angle Ψ - yaw β - slip angle α - difference in angles δ(t)- β(t) (xcm, ycm) - coordinates of the vehicles center of mass
19 |
20 | As it is known, tires' contact patch is the only part that interacts with the ground and makes a car go forward (or sideways). Well, this happens when the tire exceeds its lateral force grip and starts to slide. Best racing drivers are able to feel when the car is at its (tire’s) limit and they drive at the maximum slip angle during cornering, moving the pivot point (center of the curve) towards the middle. Unfortunately, tires’ slip angle can be only approximately calculated during racing, but tires factories provide test results of their tires’ slip angle.
21 |
22 | Implementing slip angle and weight transfer influence inside of my algorithm, the results are shown in the following picture:
23 |
24 | 
25 |
26 | 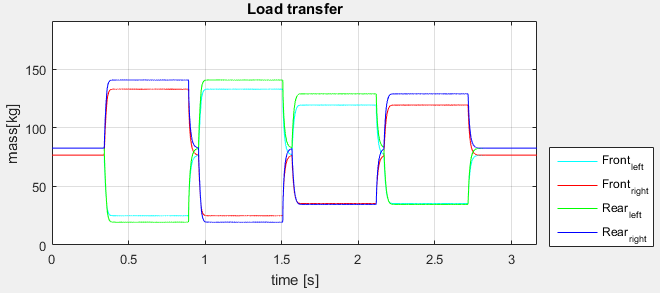 27 | This is the ISO3888 double lane change test. On the lower 4 diagrams, the difference of the angular speed of each wheel can be noticed. So, these speeds are references for the electric motors inside each wheel. As I have previously noted, this is only a base model. These values would be corrected during actual driving with a conventional implementation of Torque vectoring using only steering wheel and angular (yaw) sensor. But, using this model, the handling of the car could be foreseen and therefore we would be able to act before sliding happens. Also, thanks to this model (and its weight transfer) we can predict the threshold of wheel speed in traction control and not wait for a wheel to actually slip.
28 |
29 |
30 |
27 | This is the ISO3888 double lane change test. On the lower 4 diagrams, the difference of the angular speed of each wheel can be noticed. So, these speeds are references for the electric motors inside each wheel. As I have previously noted, this is only a base model. These values would be corrected during actual driving with a conventional implementation of Torque vectoring using only steering wheel and angular (yaw) sensor. But, using this model, the handling of the car could be foreseen and therefore we would be able to act before sliding happens. Also, thanks to this model (and its weight transfer) we can predict the threshold of wheel speed in traction control and not wait for a wheel to actually slip.
28 |
29 |
30 | 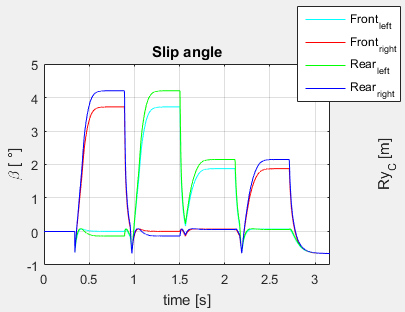 31 | This model misses a suspension model which would improve weight transfer, roll-bar as well, which is part of the real world suspension. My moto is always to come as prepared as possible for upcoming situations – as a driver looks towards the apex of the approaching corner.
32 |
33 |
34 | Wish you a nice racing weekend, good luck!
35 |
--------------------------------------------------------------------------------
/Модел кретања спортског возила са електро погоном на свим точковима Torque Vectoring.pdf:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Модел кретања спортског возила са електро погоном на свим точковима Torque Vectoring.pdf
--------------------------------------------------------------------------------
31 | This model misses a suspension model which would improve weight transfer, roll-bar as well, which is part of the real world suspension. My moto is always to come as prepared as possible for upcoming situations – as a driver looks towards the apex of the approaching corner.
32 |
33 |
34 | Wish you a nice racing weekend, good luck!
35 |
--------------------------------------------------------------------------------
/Модел кретања спортског возила са електро погоном на свим точковима Torque Vectoring.pdf:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/Tepic/Vehicle_Model/8dd5c9dee51ae082fd61abec54cda2c15d91eb9c/Модел кретања спортског возила са електро погоном на свим точковима Torque Vectoring.pdf
--------------------------------------------------------------------------------