├── common
├── loss
│ ├── __init__.py
│ ├── loss_functions.py
│ └── inverse_warp.py
├── utils
│ ├── __init__.py
│ ├── logger.py
│ ├── utils.py
│ └── custom_transforms.py
├── data_prepare
│ ├── __init__.py
│ ├── well_lit_from_varying.txt
│ ├── prepare_train_data_VIVID.py
│ └── VIVID_raw_loader.py
└── models
│ ├── __init__.py
│ ├── ResDispPoseNet.py
│ ├── PoseResNet.py
│ ├── DispResNet.py
│ └── resnet_encoder.py
├── eval_vivid
├── __init__.py
├── pose_evaluation_utils.py
└── eval_depth.py
├── media
├── overview_a.png
├── overview_b.png
├── qualitative_1.png
├── qualitative_2.png
└── qualitative_3.png
├── scripts
├── prepare_vivid_data.sh
├── train_vivid_resnet18_indoor.sh
├── train_vivid_resnet18_outdoor.sh
├── run_vivid_inference.sh
├── display_result.sh
├── test_vivid_outdoor.sh
└── test_vivid_indoor.sh
├── .gitignore
├── dataloader
├── VIVID_sequence_folders.py
└── VIVID_validation_folders.py
├── environment.yml
├── test_disp.py
├── run_inference.py
├── test_pose.py
├── README.md
└── train.py
/common/loss/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/eval_vivid/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/common/utils/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/common/data_prepare/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/media/overview_a.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/UkcheolShin/ThermalMonoDepth/HEAD/media/overview_a.png
--------------------------------------------------------------------------------
/media/overview_b.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/UkcheolShin/ThermalMonoDepth/HEAD/media/overview_b.png
--------------------------------------------------------------------------------
/media/qualitative_1.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/UkcheolShin/ThermalMonoDepth/HEAD/media/qualitative_1.png
--------------------------------------------------------------------------------
/media/qualitative_2.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/UkcheolShin/ThermalMonoDepth/HEAD/media/qualitative_2.png
--------------------------------------------------------------------------------
/media/qualitative_3.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/UkcheolShin/ThermalMonoDepth/HEAD/media/qualitative_3.png
--------------------------------------------------------------------------------
/common/models/__init__.py:
--------------------------------------------------------------------------------
1 | from .DispResNet import DispResNet
2 | from .PoseResNet import PoseResNet
3 | from .ResDispPoseNet import DispPoseResNet
4 |
--------------------------------------------------------------------------------
/scripts/prepare_vivid_data.sh:
--------------------------------------------------------------------------------
1 | # for VIVID rgb-thermal dataset
2 | DATASET=/HDD/Dataset/KAIST_VIVID
3 | TRAIN_SET=/HDD/Dataset_processed/VIVID_256/
4 | mkdir -p $TRAIN_SET
5 | python common/data_prepare/prepare_train_data_VIVID.py $DATASET --dump-root $TRAIN_SET --width 320 --height 256 --num-threads 16 --with-depth --with-pose
6 |
--------------------------------------------------------------------------------
/scripts/train_vivid_resnet18_indoor.sh:
--------------------------------------------------------------------------------
1 | DATA_ROOT=/HDD/Dataset_processed
2 | TRAIN_SET=$DATA_ROOT/VIVID_256
3 | GPU_ID=1
4 |
5 | CUDA_VISIBLE_DEVICES=${GPU_ID} \
6 | python train.py $TRAIN_SET \
7 | --resnet-layers 18 \
8 | --num-scales 1 \
9 | --scene_type indoor \
10 | -b 4 \
11 | --sequence-length 3 \
12 | --with-ssim 1 \
13 | --with-auto-mask 1 \
14 | --with-pretrain 1 \
15 | --rearrange-bin 30 \
16 | --clahe-clip 3.0 \
17 | --log-output \
18 | --name T_vivid_resnet18_indoor
19 |
--------------------------------------------------------------------------------
/scripts/train_vivid_resnet18_outdoor.sh:
--------------------------------------------------------------------------------
1 | DATA_ROOT=/HDD/Dataset_processed
2 | TRAIN_SET=$DATA_ROOT/VIVID_256
3 | GPU_ID=2
4 |
5 | CUDA_VISIBLE_DEVICES=${GPU_ID} \
6 | python train.py $TRAIN_SET \
7 | --resnet-layers 18 \
8 | --num-scales 1 \
9 | --scene_type outdoor \
10 | -b 4 \
11 | --sequence-length 3 \
12 | --with-ssim 1 \
13 | --with-auto-mask 1 \
14 | --with-pretrain 1 \
15 | --rearrange-bin 30 \
16 | --clahe-clip 2.0 \
17 | --log-output \
18 | --name T_vivid_resnet18_outdoor
19 |
--------------------------------------------------------------------------------
/scripts/run_vivid_inference.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | # run script : bash run_vivid_inference.sh
3 |
4 | NAMES=("T_vivid_resnet18_indoor")
5 |
6 | DATA_ROOT=/HDD/Dataset_processed/VIVID_256/
7 | RESNET=18
8 | IMG_H=256
9 | IMG_W=320
10 | GPU_ID=0
11 |
12 | for NAME in ${NAMES[@]}; do
13 | echo "Name : ${NAME}"
14 | RESULTS_DIR=results/${NAME}
15 | POSE_NET=checkpoints/${NAME}/exp_pose_disp_model_best.pth.tar
16 | DISP_NET=checkpoints/${NAME}/dispnet_disp_model_best.pth.tar
17 |
18 | SEQS=("indoor_robust_dark" "indoor_robust_varying" "indoor_aggresive_dark"
19 | "indoor_aggresive_local" "indoor_unstable_dark" "indoor_robust_varying_well_lit")
20 |
21 | for SEQ in ${SEQS[@]}; do
22 | echo "Seq_name : ${SEQ}"
23 |
24 | CUDA_VISIBLE_DEVICES=${GPU_ID} python run_inference.py ${DATA_ROOT} --resnet-layers $RESNET \
25 | --output-dir $RESULTS_DIR --sequence ${SEQ} --scene_type indoor --pretrained-model $DISP_NET
26 | done
27 |
28 | SEQS=("outdoor_robust_night1" "outdoor_robust_night2")
29 |
30 | for SEQ in ${SEQS[@]}; do
31 | echo "Seq_name : ${SEQ}"
32 |
33 | CUDA_VISIBLE_DEVICES=${GPU_ID} python run_inference.py ${DATA_ROOT} --resnet-layers $RESNET \
34 | --output-dir $RESULTS_DIR --sequence ${SEQ} --scene_type outdoor --pretrained-model $DISP_NET
35 | done
36 | done
37 |
--------------------------------------------------------------------------------
/scripts/display_result.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | # run script : bash
3 |
4 | NAMES=("T_vivid_resnet18_indoor")
5 | RESULTS_DIR=results
6 |
7 | for NAME in ${NAMES[@]}; do
8 | echo "NAME : ${NAME}"
9 |
10 | # depth
11 | echo "Indoor Depth : well-lit results"
12 | SEQS=("indoor_aggresive_local" "indoor_robust_varying_well_lit")
13 | for SEQ in ${SEQS[@]}; do
14 | echo "Seq_name : ${SEQ}"
15 | cat ${RESULTS_DIR}/${NAME}/Depth/${SEQ}/eval_depth.txt
16 | done
17 |
18 | echo "Indoor Depth : low-light results"
19 | SEQS=("indoor_robust_dark" "indoor_unstable_dark" "indoor_aggresive_dark" )
20 | for SEQ in ${SEQS[@]}; do
21 | echo "Seq_name : ${SEQ}"
22 | cat ${RESULTS_DIR}/${NAME}/Depth/${SEQ}/eval_depth.txt
23 | done
24 |
25 | # pose
26 | SEQS=("indoor_aggresive_local" "indoor_robust_varying" "indoor_robust_dark" "indoor_unstable_dark" "indoor_aggresive_dark" )
27 | echo "Indoor Pose : All results"
28 | for SEQ in ${SEQS[@]}; do
29 | echo "Seq_name : ${SEQ}"
30 | cat ${RESULTS_DIR}/${NAME}/POSE/${SEQ}/eval_pose.txt
31 | done
32 | done
33 |
34 | NAMES=("T_vivid_resnet18_outdoor")
35 | for NAME in ${NAMES[@]}; do
36 | echo "NAME : ${NAME}"
37 |
38 | # depth
39 | echo "Outdoor Depth : night-time results"
40 | SEQS=("outdoor_robust_night1" "outdoor_robust_night2" )
41 | for SEQ in ${SEQS[@]}; do
42 | echo "Seq_name : ${SEQ}"
43 | cat ${RESULTS_DIR}/${NAME}/Depth/${SEQ}/eval_depth.txt
44 | done
45 |
46 | # pose
47 | SEQS=("outdoor_robust_night1" "outdoor_robust_night2" )
48 | echo "Outdoor Pose : night-time results"
49 | for SEQ in ${SEQS[@]}; do
50 | echo "Seq_name : ${SEQ}"
51 | cat ${RESULTS_DIR}/${NAME}/POSE/${SEQ}/eval_pose.txt
52 | done
53 | done
54 |
55 |
--------------------------------------------------------------------------------
/scripts/test_vivid_outdoor.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | # run script : bash test_vivid_outdoor.sh
3 |
4 | GPU_ID=0
5 | DATA_ROOT=/HDD/Dataset_processed/VIVID_256/
6 | RESULTS_DIR=results/
7 |
8 | RESNET=18
9 | IMG_H=256
10 | IMG_W=320
11 | DATASET=VIVID
12 | INPUT_TYPE=T
13 | DEPTH_GT_DIR=Depth_T
14 | POSE_GT=poses_T.txt
15 |
16 | # outdoor testset
17 | NAMES=("T_vivid_resnet18_outdoor")
18 |
19 | for NAME in ${NAMES[@]}; do
20 | SEQS=("outdoor_robust_night1" "outdoor_robust_night2" )
21 | POSE_NET=checkpoints/${NAME}/exp_pose_pose_model_best.pth.tar
22 | DISP_NET=checkpoints/${NAME}/dispnet_disp_model_best.pth.tar
23 | echo "${NAME}"
24 |
25 | for SEQ in ${SEQS[@]}; do
26 | echo "Seq_name : ${SEQ}"
27 | SCENE=outdoor
28 |
29 | #mkdir -p ${RESULTS_DIR}
30 | DATA_DIR=${DATA_ROOT}/${SEQ}/
31 | OUTPUT_DEPTH_DIR=${RESULTS_DIR}/${NAME}/Depth/${SEQ}/
32 | OUTPUT_POSE_DIR=${RESULTS_DIR}/${NAME}/POSE/${SEQ}/
33 | mkdir -p ${OUTPUT_DEPTH_DIR}
34 | mkdir -p ${OUTPUT_POSE_DIR}
35 |
36 | # Detph Evaulation
37 | CUDA_VISIBLE_DEVICES=${GPU_ID} python test_disp.py \
38 | --resnet-layers $RESNET --pretrained-dispnet $DISP_NET \
39 | --img-height $IMG_H --img-width $IMG_W \
40 | --dataset-dir ${DATA_DIR} --output-dir $OUTPUT_DEPTH_DIR >> ${OUTPUT_DEPTH_DIR}/disp.txt
41 |
42 | CUDA_VISIBLE_DEVICES=${GPU_ID} python eval_vivid/eval_depth.py \
43 | --dataset $DATASET --pred_depth ${OUTPUT_DEPTH_DIR}/predictions.npy \
44 | --gt_depth ${DATA_DIR}/${DEPTH_GT_DIR} --scene outdoor >> ${OUTPUT_DEPTH_DIR}/eval_depth.txt
45 |
46 | rm ${OUTPUT_DEPTH_DIR}/predictions.npy
47 |
48 |
49 | # Pose Evaulation
50 | CUDA_VISIBLE_DEVICES=${GPU_ID} python test_pose.py \
51 | --resnet-layers $RESNET --pretrained-posenet $POSE_NET \
52 | --img-height $IMG_H --img-width $IMG_W \
53 | --dataset-dir ${DATA_ROOT} --output-dir ${OUTPUT_POSE_DIR} \
54 | --sequences ${SEQ} >> ${OUTPUT_POSE_DIR}/eval_pose.txt
55 | done
56 | done
57 |
58 |
--------------------------------------------------------------------------------
/common/models/ResDispPoseNet.py:
--------------------------------------------------------------------------------
1 | from __future__ import absolute_import, division, print_function
2 | import numpy as np
3 |
4 | import torch
5 | import torch.nn as nn
6 | import torch.nn.functional as F
7 |
8 | from .resnet_encoder import *
9 | from .PoseResNet import PoseDecoder
10 | from .DispResNet import DepthDecoder
11 |
12 | class DispPoseResNet(nn.Module):
13 | def __init__(self, num_layers = 18, pretrained = True, num_channel=1):
14 | super(DispPoseResNet, self).__init__()
15 | self.encoder = ResnetEncoder(num_layers = num_layers, pretrained = pretrained, num_input_images=1, num_channel=num_channel)
16 | self.depth_decoder = DepthDecoder(self.encoder.num_ch_enc)
17 | self.pose_decoder = PoseDecoder(self.encoder.num_ch_enc*2)
18 |
19 | self.DispResNet = DispResNet(self.encoder, self.depth_decoder)
20 | self.PoseResNet = PoseResNet(self.encoder, self.pose_decoder)
21 |
22 | def init_weights(self):
23 | pass
24 |
25 | class DispResNet(nn.Module):
26 |
27 | def __init__(self, encoder, decoder):
28 | super(DispResNet, self).__init__()
29 | self.encoder = encoder
30 | self.decoder = decoder
31 |
32 | def init_weights(self):
33 | pass
34 |
35 | def forward(self, x):
36 | enc_features = self.encoder(x)
37 | outputs = self.decoder(enc_features)
38 |
39 | if self.training:
40 | return outputs
41 | else:
42 | return outputs[0]
43 |
44 | class PoseResNet(nn.Module):
45 |
46 | def __init__(self, encoder, decoder):
47 | super(PoseResNet, self).__init__()
48 | self.encoder = encoder
49 | self.decoder = decoder
50 |
51 | def init_weights(self):
52 | pass
53 |
54 | def forward(self, img1, img2):
55 | features1 = self.encoder(img1)
56 | features2 = self.encoder(img2)
57 |
58 | features = []
59 | for k in range(0, len(features1)) :
60 | features.append(torch.cat([features1[k],features2[k]],dim=1))
61 | pose = self.decoder([features])
62 | return pose
63 |
--------------------------------------------------------------------------------
/scripts/test_vivid_indoor.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | # run script : bash test_vivid_indoor.sh
3 | GPU_ID=0
4 | DATA_ROOT=/HDD/Dataset_processed/VIVID_256/
5 | RESULTS_DIR=results/
6 |
7 | RESNET=18
8 | IMG_H=256
9 | IMG_W=320
10 | DATASET=VIVID
11 | DEPTH_GT_DIR=Depth_T
12 | POSE_GT=poses_T.txt
13 |
14 | NAMES=("T_vivid_resnet18_indoor")
15 |
16 | for NAME in ${NAMES[@]}; do
17 | # indoor testset
18 | SEQS=("indoor_robust_dark" "indoor_aggresive_dark" "indoor_aggresive_local" "indoor_unstable_dark" "indoor_robust_varying_well_lit")
19 | POSE_NET=checkpoints/${NAME}/exp_pose_pose_model_best.pth.tar
20 | DISP_NET=checkpoints/${NAME}/dispnet_disp_model_best.pth.tar
21 | echo "${NAME}"
22 |
23 | # depth
24 | for SEQ in ${SEQS[@]}; do
25 | echo "Seq_name : ${SEQ}"
26 |
27 | #mkdir -p ${RESULTS_DIR}
28 | DATA_DIR=${DATA_ROOT}/${SEQ}/
29 | OUTPUT_DEPTH_DIR=${RESULTS_DIR}/${NAME}/Depth/${SEQ}/
30 | mkdir -p ${OUTPUT_DEPTH_DIR}
31 |
32 | # Detph Evaulation
33 | CUDA_VISIBLE_DEVICES=${GPU_ID} python test_disp.py \
34 | --resnet-layers $RESNET --pretrained-dispnet $DISP_NET \
35 | --img-height $IMG_H --img-width $IMG_W \
36 | --dataset-dir ${DATA_DIR} --output-dir $OUTPUT_DEPTH_DIR >> ${OUTPUT_DEPTH_DIR}/disp.txt
37 |
38 | CUDA_VISIBLE_DEVICES=${GPU_ID} python eval_vivid/eval_depth.py \
39 | --dataset $DATASET --pred_depth ${OUTPUT_DEPTH_DIR}/predictions.npy \
40 | --gt_depth ${DATA_DIR}/${DEPTH_GT_DIR} --scene indoor >> ${OUTPUT_DEPTH_DIR}/eval_depth.txt
41 |
42 | rm ${OUTPUT_DEPTH_DIR}/predictions.npy
43 | done
44 |
45 | # pose
46 | SEQS=("indoor_robust_dark" "indoor_robust_varying" "indoor_aggresive_dark" "indoor_aggresive_local" "indoor_unstable_dark")
47 | for SEQ in ${SEQS[@]}; do
48 | echo "Seq_name : ${SEQ}"
49 |
50 | #mkdir -p ${RESULTS_DIR}
51 | DATA_DIR=${DATA_ROOT}/${SEQ}/
52 | OUTPUT_POSE_DIR=${RESULTS_DIR}/${NAME}/POSE/${SEQ}/
53 | mkdir -p ${OUTPUT_POSE_DIR}
54 |
55 | # Pose Evaulation
56 | CUDA_VISIBLE_DEVICES=${GPU_ID} python test_pose.py \
57 | --resnet-layers $RESNET --pretrained-posenet $POSE_NET \
58 | --img-height $IMG_H --img-width $IMG_W \
59 | --dataset-dir ${DATA_ROOT} --output-dir ${OUTPUT_POSE_DIR} \
60 | --sequences ${SEQ} >> ${OUTPUT_POSE_DIR}/eval_pose.txt
61 | done
62 | done
63 |
--------------------------------------------------------------------------------
/eval_vivid/pose_evaluation_utils.py:
--------------------------------------------------------------------------------
1 | import numpy as np
2 | from path import Path
3 | from imageio import imread
4 | from tqdm import tqdm
5 |
6 |
7 | class test_framework_VIVID(object):
8 | def __init__(self, root, sequence_set, seq_length=3, step=1):
9 | self.root = root
10 | self.img_files, self.poses, self.sample_indices = read_scene_data(self.root, sequence_set, seq_length, step)
11 |
12 | def generator(self):
13 | for img_list, pose_list, sample_list in zip(self.img_files, self.poses, self.sample_indices):
14 | for snippet_indices in sample_list:
15 | imgs = [np.expand_dims(imread(img_list[i]).astype(np.float32), axis=2) for i in snippet_indices]
16 |
17 | poses = np.stack([pose_list[i] for i in snippet_indices])
18 | first_pose = poses[0]
19 | poses[:,:,-1] -= first_pose[:,-1]
20 | compensated_poses = np.linalg.inv(first_pose[:,:3]) @ poses
21 |
22 | yield {'imgs': imgs,
23 | 'path': img_list[0],
24 | 'poses': compensated_poses
25 | }
26 |
27 | def __iter__(self):
28 | return self.generator()
29 |
30 | def __len__(self):
31 | return sum(len(imgs) for imgs in self.img_files)
32 |
33 |
34 | def read_scene_data(data_root, sequence_set, seq_length=3, step=1):
35 | data_root = Path(data_root)
36 | im_sequences = []
37 | poses_sequences = []
38 | indices_sequences = []
39 | demi_length = (seq_length - 1) // 2
40 | shift_range = np.array([step*i for i in range(-demi_length, demi_length + 1)]).reshape(1, -1)
41 |
42 | sequences = []
43 | for seq in sequence_set:
44 | sequences.append((data_root/seq))
45 |
46 | print('getting test metadata for theses sequences : {}'.format(sequences))
47 | for sequence in tqdm(sequences):
48 | imgs = sorted((sequence/'Thermal').files('*.png'))
49 | poses = np.genfromtxt(sequence/'poses_T.txt').astype(np.float64).reshape(-1, 3, 4)
50 |
51 | # construct 5-snippet sequences
52 | tgt_indices = np.arange(demi_length, len(imgs) - demi_length).reshape(-1, 1)
53 | snippet_indices = shift_range + tgt_indices
54 | im_sequences.append(imgs)
55 | poses_sequences.append(poses)
56 | indices_sequences.append(snippet_indices)
57 | return im_sequences, poses_sequences, indices_sequences
58 |
--------------------------------------------------------------------------------
/.gitignore:
--------------------------------------------------------------------------------
1 | # Byte-compiled / optimized / DLL files
2 | __pycache__/
3 | *.py[cod]
4 | *$py.class
5 |
6 | # User define
7 | checkpoints
8 | results
9 |
10 |
11 | # C extensions
12 | *.so
13 |
14 | # Distribution / packaging
15 | .Python
16 | build/
17 | develop-eggs/
18 | dist/
19 | downloads/
20 | eggs/
21 | .eggs/
22 | lib/
23 | lib64/
24 | parts/
25 | sdist/
26 | var/
27 | wheels/
28 | pip-wheel-metadata/
29 | share/python-wheels/
30 | *.egg-info/
31 | .installed.cfg
32 | *.egg
33 | MANIFEST
34 |
35 | # PyInstaller
36 | # Usually these files are written by a python script from a template
37 | # before PyInstaller builds the exe, so as to inject date/other infos into it.
38 | *.manifest
39 | *.spec
40 |
41 | # Installer logs
42 | pip-log.txt
43 | pip-delete-this-directory.txt
44 |
45 | # Unit test / coverage reports
46 | htmlcov/
47 | .tox/
48 | .nox/
49 | .coverage
50 | .coverage.*
51 | .cache
52 | nosetests.xml
53 | coverage.xml
54 | *.cover
55 | *.py,cover
56 | .hypothesis/
57 | .pytest_cache/
58 |
59 | # Translations
60 | *.mo
61 | *.pot
62 |
63 | # Django stuff:
64 | *.log
65 | local_settings.py
66 | db.sqlite3
67 | db.sqlite3-journal
68 |
69 | # Flask stuff:
70 | instance/
71 | .webassets-cache
72 |
73 | # Scrapy stuff:
74 | .scrapy
75 |
76 | # Sphinx documentation
77 | docs/_build/
78 |
79 | # PyBuilder
80 | target/
81 |
82 | # Jupyter Notebook
83 | .ipynb_checkpoints
84 |
85 | # IPython
86 | profile_default/
87 | ipython_config.py
88 |
89 | # pyenv
90 | .python-version
91 |
92 | # pipenv
93 | # According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control.
94 | # However, in case of collaboration, if having platform-specific dependencies or dependencies
95 | # having no cross-platform support, pipenv may install dependencies that don't work, or not
96 | # install all needed dependencies.
97 | #Pipfile.lock
98 |
99 | # PEP 582; used by e.g. github.com/David-OConnor/pyflow
100 | __pypackages__/
101 |
102 | # Celery stuff
103 | celerybeat-schedule
104 | celerybeat.pid
105 |
106 | # SageMath parsed files
107 | *.sage.py
108 |
109 | # Environments
110 | .env
111 | .venv
112 | env/
113 | venv/
114 | ENV/
115 | env.bak/
116 | venv.bak/
117 |
118 | # Spyder project settings
119 | .spyderproject
120 | .spyproject
121 |
122 | # Rope project settings
123 | .ropeproject
124 |
125 | # mkdocs documentation
126 | /site
127 |
128 | # mypy
129 | .mypy_cache/
130 | .dmypy.json
131 | dmypy.json
132 |
133 | # Pyre type checker
134 | .pyre/
135 |
--------------------------------------------------------------------------------
/common/models/PoseResNet.py:
--------------------------------------------------------------------------------
1 | # Copyright Niantic 2019. Patent Pending. All rights reserved.
2 | #
3 | # This software is licensed under the terms of the Monodepth2 licence
4 | # which allows for non-commercial use only, the full terms of which are made
5 | # available in the LICENSE file.
6 |
7 | from __future__ import absolute_import, division, print_function
8 |
9 | import torch
10 | import torch.nn as nn
11 | from collections import OrderedDict
12 | from .resnet_encoder import *
13 |
14 | class PoseDecoder(nn.Module):
15 | def __init__(self, num_ch_enc, num_input_features=1, num_frames_to_predict_for=1, stride=1):
16 | super(PoseDecoder, self).__init__()
17 |
18 | self.num_ch_enc = num_ch_enc
19 | self.num_input_features = num_input_features
20 |
21 | if num_frames_to_predict_for is None:
22 | num_frames_to_predict_for = num_input_features - 1
23 | self.num_frames_to_predict_for = num_frames_to_predict_for
24 |
25 | self.convs = OrderedDict()
26 | self.convs[("squeeze")] = nn.Conv2d(self.num_ch_enc[-1], 256, 1)
27 | self.convs[("pose", 0)] = nn.Conv2d(num_input_features * 256, 256, 3, stride, 1)
28 | self.convs[("pose", 1)] = nn.Conv2d(256, 256, 3, stride, 1)
29 | self.convs[("pose", 2)] = nn.Conv2d(256, 6 * num_frames_to_predict_for, 1)
30 |
31 | self.relu = nn.ReLU()
32 |
33 | self.net = nn.ModuleList(list(self.convs.values()))
34 |
35 | def forward(self, input_features):
36 | last_features = [f[-1] for f in input_features]
37 |
38 | cat_features = [self.relu(self.convs["squeeze"](f)) for f in last_features]
39 | cat_features = torch.cat(cat_features, 1)
40 |
41 | out = cat_features
42 | for i in range(3):
43 | out = self.convs[("pose", i)](out)
44 | if i != 2:
45 | out = self.relu(out)
46 |
47 | out = out.mean(3).mean(2)
48 |
49 | pose = 0.01 * out.view(-1, 6)
50 |
51 | return pose
52 |
53 |
54 | class PoseResNet(nn.Module):
55 |
56 | def __init__(self, num_layers = 18, pretrained = True, num_channel=3):
57 | super(PoseResNet, self).__init__()
58 | self.encoder = ResnetEncoder(num_layers = num_layers, pretrained = pretrained, num_input_images=2, num_channel=num_channel)
59 | self.decoder = PoseDecoder(self.encoder.num_ch_enc)
60 |
61 | def init_weights(self):
62 | pass
63 |
64 | def forward(self, img1, img2):
65 | x = torch.cat([img1,img2],1)
66 | features = self.encoder(x)
67 | pose = self.decoder([features])
68 | return pose
69 |
--------------------------------------------------------------------------------
/common/utils/logger.py:
--------------------------------------------------------------------------------
1 | from blessings import Terminal
2 | import progressbar
3 | import sys
4 |
5 |
6 | class TermLogger(object):
7 | def __init__(self, n_epochs, train_size, valid_size):
8 | self.n_epochs = n_epochs
9 | self.train_size = train_size
10 | self.valid_size = valid_size
11 | self.t = Terminal()
12 | s = 10
13 | e = 1 # epoch bar position
14 | tr = 3 # train bar position
15 | ts = 6 # valid bar position
16 | value = self.t.height
17 | h = int(0 if value is None else value)
18 |
19 | for i in range(10):
20 | print('')
21 | self.epoch_bar = progressbar.ProgressBar(
22 | max_value=n_epochs, fd=Writer(self.t, (0, h-s+e)))
23 |
24 | self.train_writer = Writer(self.t, (0, h-s+tr))
25 | self.train_bar_writer = Writer(self.t, (0, h-s+tr+1))
26 |
27 | self.valid_writer = Writer(self.t, (0, h-s+ts-1))
28 | self.valid_writer2 = Writer(self.t, (0, h-s+ts))
29 | self.valid_bar_writer = Writer(self.t, (0, h-s+ts+1))
30 |
31 | self.reset_train_bar()
32 | self.reset_valid_bar()
33 |
34 | def reset_train_bar(self):
35 | self.train_bar = progressbar.ProgressBar(
36 | max_value=self.train_size, fd=self.train_bar_writer)
37 |
38 | def reset_valid_bar(self):
39 | self.valid_bar = progressbar.ProgressBar(
40 | max_value=self.valid_size, fd=self.valid_bar_writer)
41 |
42 |
43 | class Writer(object):
44 | """Create an object with a write method that writes to a
45 | specific place on the screen, defined at instantiation.
46 |
47 | This is the glue between blessings and progressbar.
48 | """
49 |
50 | def __init__(self, t, location):
51 | """
52 | Input: location - tuple of ints (x, y), the position
53 | of the bar in the terminal
54 | """
55 | self.location = location
56 | self.t = t
57 |
58 | def write(self, string):
59 | with self.t.location(*self.location):
60 | sys.stdout.write("\033[K")
61 | print(string)
62 |
63 | def flush(self):
64 | return
65 |
66 |
67 | class AverageMeter(object):
68 | """Computes and stores the average and current value"""
69 |
70 | def __init__(self, i=1, precision=3):
71 | self.meters = i
72 | self.precision = precision
73 | self.reset(self.meters)
74 |
75 | def reset(self, i):
76 | self.val = [0]*i
77 | self.avg = [0]*i
78 | self.sum = [0]*i
79 | self.count = 0
80 |
81 | def update(self, val, n=1):
82 | if not isinstance(val, list):
83 | val = [val]
84 | assert(len(val) == self.meters)
85 | self.count += n
86 | for i, v in enumerate(val):
87 | self.val[i] = v
88 | self.sum[i] += v * n
89 | self.avg[i] = self.sum[i] / self.count
90 |
91 | def __repr__(self):
92 | val = ' '.join(['{:.{}f}'.format(v, self.precision) for v in self.val])
93 | avg = ' '.join(['{:.{}f}'.format(a, self.precision) for a in self.avg])
94 | return '{} ({})'.format(val, avg)
95 |
--------------------------------------------------------------------------------
/common/data_prepare/well_lit_from_varying.txt:
--------------------------------------------------------------------------------
1 | 000020
2 | 000116
3 | 000168
4 | 000216
5 | 000302
6 | 000325
7 | 000376
8 | 000420
9 | 000443
10 | 000492
11 | 000538
12 | 000590
13 | 000023
14 | 000118
15 | 000169
16 | 000217
17 | 000303
18 | 000326
19 | 000377
20 | 000421
21 | 000444
22 | 000493
23 | 000539
24 | 000591
25 | 000042
26 | 000120
27 | 000170
28 | 000218
29 | 000304
30 | 000327
31 | 000378
32 | 000422
33 | 000445
34 | 000494
35 | 000540
36 | 000592
37 | 000044
38 | 000121
39 | 000171
40 | 000219
41 | 000305
42 | 000328
43 | 000379
44 | 000423
45 | 000446
46 | 000495
47 | 000541
48 | 000593
49 | 000045
50 | 000122
51 | 000172
52 | 000220
53 | 000306
54 | 000329
55 | 000380
56 | 000424
57 | 000447
58 | 000496
59 | 000542
60 | 000594
61 | 000046
62 | 000123
63 | 000173
64 | 000247
65 | 000307
66 | 000330
67 | 000381
68 | 000425
69 | 000448
70 | 000497
71 | 000543
72 | 000595
73 | 000047
74 | 000124
75 | 000174
76 | 000248
77 | 000308
78 | 000331
79 | 000382
80 | 000426
81 | 000449
82 | 000498
83 | 000544
84 | 000596
85 | 000065
86 | 000125
87 | 000175
88 | 000249
89 | 000309
90 | 000332
91 | 000383
92 | 000427
93 | 000450
94 | 000499
95 | 000545
96 | 000597
97 | 000067
98 | 000126
99 | 000176
100 | 000250
101 | 000310
102 | 000333
103 | 000385
104 | 000428
105 | 000477
106 | 000500
107 | 000546
108 | 000598
109 | 000069
110 | 000127
111 | 000177
112 | 000251
113 | 000311
114 | 000334
115 | 000387
116 | 000429
117 | 000478
118 | 000501
119 | 000547
120 | 000599
121 | 000071
122 | 000128
123 | 000178
124 | 000252
125 | 000312
126 | 000335
127 | 000389
128 | 000430
129 | 000479
130 | 000502
131 | 000548
132 | 000600
133 | 000073
134 | 000129
135 | 000179
136 | 000253
137 | 000313
138 | 000336
139 | 000392
140 | 000431
141 | 000480
142 | 000503
143 | 000549
144 | 000601
145 | 000076
146 | 000130
147 | 000180
148 | 000254
149 | 000314
150 | 000337
151 | 000394
152 | 000432
153 | 000481
154 | 000504
155 | 000550
156 | 000602
157 | 000078
158 | 000131
159 | 000181
160 | 000255
161 | 000315
162 | 000338
163 | 000396
164 | 000433
165 | 000482
166 | 000505
167 | 000551
168 | 000603
169 | 000079
170 | 000159
171 | 000182
172 | 000257
173 | 000316
174 | 000339
175 | 000397
176 | 000434
177 | 000483
178 | 000506
179 | 000552
180 | 000604
181 | 000080
182 | 000160
183 | 000183
184 | 000259
185 | 000317
186 | 000340
187 | 000398
188 | 000435
189 | 000484
190 | 000507
191 | 000553
192 | 000081
193 | 000161
194 | 000184
195 | 000261
196 | 000318
197 | 000369
198 | 000399
199 | 000436
200 | 000485
201 | 000508
202 | 000554
203 | 000082
204 | 000162
205 | 000185
206 | 000263
207 | 000319
208 | 000370
209 | 000400
210 | 000437
211 | 000486
212 | 000509
213 | 000581
214 | 000083
215 | 000163
216 | 000186
217 | 000266
218 | 000320
219 | 000371
220 | 000401
221 | 000438
222 | 000487
223 | 000510
224 | 000583
225 | 000084
226 | 000164
227 | 000187
228 | 000269
229 | 000321
230 | 000372
231 | 000402
232 | 000439
233 | 000488
234 | 000534
235 | 000585
236 | 000111
237 | 000165
238 | 000213
239 | 000274
240 | 000322
241 | 000373
242 | 000403
243 | 000440
244 | 000489
245 | 000535
246 | 000587
247 | 000112
248 | 000166
249 | 000214
250 | 000280
251 | 000323
252 | 000374
253 | 000404
254 | 000441
255 | 000490
256 | 000536
257 | 000588
258 | 000114
259 | 000167
260 | 000215
261 | 000282
262 | 000324
263 | 000375
264 | 000419
265 | 000442
266 | 000491
267 | 000537
268 | 000589
--------------------------------------------------------------------------------
/dataloader/VIVID_sequence_folders.py:
--------------------------------------------------------------------------------
1 | import torch
2 | import torch.utils.data as data
3 | import numpy as np
4 |
5 | import math
6 | import random
7 | from imageio import imread
8 | from path import Path
9 |
10 | def load_as_float(path):
11 | return np.expand_dims(imread(path).astype(np.float32), axis=2) # HW -> HW1
12 |
13 | class SequenceFolder(data.Dataset):
14 | """A sequence data loader where the files are arranged in this way:
15 | root/scene_1/Thermal/0000000.png
16 | root/scene_1/Thermal/0000001.png
17 | ..
18 | root/scene_1/cam.txt
19 | root/scene_2/Thermal/0000000.png
20 | .
21 | transform functions must take in a list a images and a numpy array (usually intrinsics matrix)
22 | """
23 | def __init__(self, root, seed=None, train=True, sequence_length=3,\
24 | tf_share=None, tf_input=None, tf_loss=None, \
25 | scene_type='indoor', interval=1):
26 | np.random.seed(seed)
27 | random.seed(seed)
28 |
29 | self.root = Path(root)
30 | if scene_type == 'indoor':
31 | folder_list_path = self.root/'train_indoor.txt' if train else self.root/'val_indoor.txt'
32 | elif scene_type == 'outdoor':
33 | folder_list_path = self.root/'train_outdoor.txt' if train else self.root/'val_outdoor.txt'
34 |
35 | self.folders = [self.root/folder[:-1] for folder in open(folder_list_path)]
36 | self.tf_share = tf_share
37 | self.tf_input = tf_input
38 | self.tf_loss = tf_loss
39 | self.crawl_folders(sequence_length, interval)
40 |
41 | def crawl_folders(self, sequence_length, interval):
42 | sequence_set = []
43 | demi_length = (sequence_length-1)//2 + interval - 1
44 | shifts = list(range(-demi_length, demi_length + 1))
45 | for i in range(1, 2*demi_length):
46 | shifts.pop(1)
47 |
48 | for folder in self.folders:
49 | imgs = sorted((folder/"Thermal").files('*.png'))
50 | intrinsics = np.genfromtxt(folder/'cam_T.txt').astype(np.float32).reshape((3, 3))
51 |
52 | for i in range(demi_length, len(imgs)-demi_length):
53 | sample = {'intrinsics': intrinsics, 'tgt': imgs[i], 'ref_imgs': []}
54 | for j in shifts:
55 | sample['ref_imgs'].append(imgs[i+j])
56 | sequence_set.append(sample)
57 |
58 | random.shuffle(sequence_set)
59 | self.samples = sequence_set
60 |
61 | def __getitem__(self, index):
62 | sample = self.samples[index]
63 |
64 | # Read thermal images & GT depths
65 | tgt_img = load_as_float(sample['tgt'])
66 | ref_imgs = [load_as_float(ref_img) for ref_img in sample['ref_imgs']]
67 |
68 | # Pre-process thermal images for network input & loss calculation
69 | imgs, intrinsics = self.tf_share([tgt_img] + ref_imgs, np.expand_dims(np.copy(sample['intrinsics']),axis=0))
70 | imgs_input, _ = self.tf_input(imgs, None)
71 | imgs_loss, _ = self.tf_loss(imgs, None)
72 |
73 | tgt_img_input = imgs_input[0]
74 | ref_imgs_input = imgs_input[1:]
75 | tgt_img_loss = imgs_loss[0]
76 | ref_imgs_loss = imgs_loss[1:]
77 |
78 | return tgt_img_input, ref_imgs_input, tgt_img_loss, ref_imgs_loss, intrinsics.squeeze()
79 |
80 | def __len__(self):
81 | return len(self.samples)
82 |
--------------------------------------------------------------------------------
/environment.yml:
--------------------------------------------------------------------------------
1 | name: ThermalDepth
2 | channels:
3 | - pytorch
4 | - conda-forge
5 | - defaults
6 | dependencies:
7 | - _libgcc_mutex=0.1=main
8 | - blas=1.0=mkl
9 | - ca-certificates=2020.6.20=hecda079_0
10 | - certifi=2020.6.20=py37hc8dfbb8_0
11 | - cudatoolkit=10.2.89=hfd86e86_1
12 | - freetype=2.10.2=h5ab3b9f_0
13 | - intel-openmp=2020.1=217
14 | - jpeg=9b=h024ee3a_2
15 | - ld_impl_linux-64=2.33.1=h53a641e_7
16 | - libedit=3.1.20191231=h7b6447c_0
17 | - libffi=3.2.1=hd88cf55_4
18 | - libgcc-ng=9.1.0=hdf63c60_0
19 | - libgfortran-ng=7.3.0=hdf63c60_0
20 | - libpng=1.6.37=hbc83047_0
21 | - libprotobuf=3.12.3=h8b12597_1
22 | - libstdcxx-ng=9.1.0=hdf63c60_0
23 | - libtiff=4.1.0=h2733197_1
24 | - lz4-c=1.9.2=he6710b0_0
25 | - mkl=2020.1=217
26 | - mkl-service=2.3.0=py37he904b0f_0
27 | - mkl_fft=1.1.0=py37h23d657b_0
28 | - mkl_random=1.1.1=py37h0573a6f_0
29 | - ncurses=6.2=he6710b0_1
30 | - ninja=1.9.0=py37hfd86e86_0
31 | - numpy=1.18.5=py37ha1c710e_0
32 | - numpy-base=1.18.5=py37hde5b4d6_0
33 | - olefile=0.46=py37_0
34 | - openssl=1.1.1g=h516909a_0
35 | - pillow=7.1.2=py37hb39fc2d_0
36 | - pip=20.1.1=py37_1
37 | - python=3.7.6=h0371630_2
38 | - python_abi=3.7=1_cp37m
39 | - pytorch=1.5.1=py3.7_cuda10.2.89_cudnn7.6.5_0
40 | - pyyaml=5.3.1=py37hb5d75c8_1
41 | - readline=7.0=h7b6447c_5
42 | - setuptools=47.3.1=py37_0
43 | - six=1.15.0=py_0
44 | - sqlite=3.32.3=h62c20be_0
45 | - tensorboardx=2.1=py_0
46 | - termcolor=1.1.0=py_2
47 | - tk=8.6.10=hbc83047_0
48 | - torchvision=0.6.1=py37_cu102
49 | - wheel=0.34.2=py37_0
50 | - xz=5.2.5=h7b6447c_0
51 | - yacs=0.1.6=py_0
52 | - yaml=0.2.5=h516909a_0
53 | - zlib=1.2.11=h7b6447c_3
54 | - zstd=1.4.4=h0b5b093_3
55 | - pip:
56 | - absl-py==0.9.0
57 | - argparse==1.4.0
58 | - astunparse==1.6.3
59 | - blessings==1.7
60 | - cachetools==4.1.1
61 | - catkin-pkg==0.4.22
62 | - cffi==1.14.4
63 | - chardet==3.0.4
64 | - click==7.1.2
65 | - cloudpickle==1.6.0
66 | - configparser==5.0.1
67 | - cycler==0.10.0
68 | - decorator==4.4.2
69 | - distro==1.5.0
70 | - docker-pycreds==0.4.0
71 | - docutils==0.16
72 | - future==0.18.2
73 | - gast==0.3.3
74 | - gitdb==4.0.5
75 | - gitpython==3.1.11
76 | - google-auth==1.18.0
77 | - google-auth-oauthlib==0.4.1
78 | - google-pasta==0.2.0
79 | - grpcio==1.30.0
80 | - h5py==2.10.0
81 | - horovod==0.21.0
82 | - idna==2.10
83 | - imageio==2.9.0
84 | - importlib-metadata==1.7.0
85 | - keras-preprocessing==1.1.2
86 | - kiwisolver==1.2.0
87 | - markdown==3.2.2
88 | - matplotlib==3.2.2
89 | - networkx==2.4
90 | - oauthlib==3.1.0
91 | - opencv-python==4.3.0.36
92 | - opt-einsum==3.2.1
93 | - path==14.0.1
94 | - pebble==4.5.3
95 | - progressbar2==3.51.4
96 | - promise==2.3
97 | - protobuf==3.12.2
98 | - psutil==5.8.0
99 | - pyasn1==0.4.8
100 | - pyasn1-modules==0.2.8
101 | - pycparser==2.20
102 | - pyparsing==2.4.7
103 | - python-dateutil==2.8.1
104 | - python-utils==2.4.0
105 | - pywavelets==1.1.1
106 | - requests==2.24.0
107 | - requests-oauthlib==1.3.0
108 | - rospkg==1.2.8
109 | - rsa==4.6
110 | - scikit-image==0.17.2
111 | - scipy==1.1.0
112 | - sentry-sdk==0.19.5
113 | - shortuuid==1.0.1
114 | - smmap==3.0.4
115 | - subprocess32==3.5.4
116 | - tensorboard==2.2.2
117 | - tensorboard-plugin-wit==1.7.0
118 | - tensorflow==2.2.0
119 | - tensorflow-estimator==2.2.0
120 | - tifffile==2020.7.4
121 | - torchgeometry==0.1.2
122 | - tqdm==4.47.0
123 | - urllib3==1.25.9
124 | - wandb==0.10.12
125 | - watchdog==1.0.2
126 | - werkzeug==1.0.1
127 | - wrapt==1.12.1
128 | - zipp==3.1.0
129 | prefix: /home/user/anaconda3/envs/ThermalDepth
130 |
131 |
--------------------------------------------------------------------------------
/common/models/DispResNet.py:
--------------------------------------------------------------------------------
1 | from __future__ import absolute_import, division, print_function
2 | import numpy as np
3 |
4 | import torch
5 | import torch.nn as nn
6 | import torch.nn.functional as F
7 | from .resnet_encoder import *
8 |
9 |
10 | import numpy as np
11 | from collections import OrderedDict
12 |
13 | class ConvBlock(nn.Module):
14 | """Layer to perform a convolution followed by ELU
15 | """
16 | def __init__(self, in_channels, out_channels):
17 | super(ConvBlock, self).__init__()
18 |
19 | self.conv = Conv3x3(in_channels, out_channels)
20 | self.nonlin = nn.ELU(inplace=True)
21 |
22 | def forward(self, x):
23 | out = self.conv(x)
24 | out = self.nonlin(out)
25 | return out
26 |
27 | class Conv3x3(nn.Module):
28 | """Layer to pad and convolve input
29 | """
30 | def __init__(self, in_channels, out_channels, use_refl=True):
31 | super(Conv3x3, self).__init__()
32 |
33 | if use_refl:
34 | self.pad = nn.ReflectionPad2d(1)
35 | else:
36 | self.pad = nn.ZeroPad2d(1)
37 | self.conv = nn.Conv2d(int(in_channels), int(out_channels), 3)
38 |
39 | def forward(self, x):
40 | out = self.pad(x)
41 | out = self.conv(out)
42 | return out
43 |
44 | def upsample(x):
45 | """Upsample input tensor by a factor of 2
46 | """
47 | return F.interpolate(x, scale_factor=2, mode="nearest")
48 |
49 | class DepthDecoder(nn.Module):
50 | def __init__(self, num_ch_enc, scales=range(4), num_output_channels=1, use_skips=True):
51 | super(DepthDecoder, self).__init__()
52 |
53 | self.alpha = 10
54 | self.beta = 0.01
55 |
56 | self.num_output_channels = num_output_channels
57 | self.use_skips = use_skips
58 | self.upsample_mode = 'nearest'
59 | self.scales = scales
60 |
61 | self.num_ch_enc = num_ch_enc
62 | self.num_ch_dec = np.array([16, 32, 64, 128, 256])
63 |
64 | # decoder
65 | self.convs = OrderedDict()
66 | for i in range(4, -1, -1):
67 | # upconv_0
68 | num_ch_in = self.num_ch_enc[-1] if i == 4 else self.num_ch_dec[i + 1]
69 | num_ch_out = self.num_ch_dec[i]
70 | self.convs[("upconv", i, 0)] = ConvBlock(num_ch_in, num_ch_out)
71 |
72 | # upconv_1
73 | num_ch_in = self.num_ch_dec[i]
74 | if self.use_skips and i > 0:
75 | num_ch_in += self.num_ch_enc[i - 1]
76 | num_ch_out = self.num_ch_dec[i]
77 | self.convs[("upconv", i, 1)] = ConvBlock(num_ch_in, num_ch_out)
78 |
79 | for s in self.scales:
80 | self.convs[("dispconv", s)] = Conv3x3(self.num_ch_dec[s], self.num_output_channels)
81 |
82 | self.decoder = nn.ModuleList(list(self.convs.values()))
83 | self.sigmoid = nn.Sigmoid()
84 |
85 | def forward(self, input_features):
86 | self.outputs = []
87 |
88 | # decoder
89 | x = input_features[-1]
90 | for i in range(4, -1, -1):
91 | x = self.convs[("upconv", i, 0)](x)
92 | x = [upsample(x)]
93 | if self.use_skips and i > 0:
94 | x += [input_features[i - 1]]
95 | x = torch.cat(x, 1)
96 | x = self.convs[("upconv", i, 1)](x)
97 | if i in self.scales:
98 | self.outputs.append(self.alpha * self.sigmoid(self.convs[("dispconv", i)](x)) + self.beta)
99 |
100 | self.outputs = self.outputs[::-1]
101 |
102 | return self.outputs
103 |
104 | class DispResNet(nn.Module):
105 |
106 | def __init__(self, num_layers = 18, pretrained = True, num_channel=3):
107 | super(DispResNet, self).__init__()
108 | self.encoder = ResnetEncoder(num_layers = num_layers, pretrained = pretrained, num_input_images=1, num_channel=num_channel)
109 | self.decoder = DepthDecoder(self.encoder.num_ch_enc)
110 | def init_weights(self):
111 | pass
112 |
113 | def forward(self, x):
114 | features = self.encoder(x)
115 | outputs = self.decoder(features)
116 |
117 | if self.training:
118 | return outputs
119 | else:
120 | return outputs[0]
121 |
--------------------------------------------------------------------------------
/test_disp.py:
--------------------------------------------------------------------------------
1 | import torch
2 | from skimage.transform import resize as imresize
3 | from imageio import imread
4 | import numpy as np
5 | from path import Path
6 | import argparse
7 | from tqdm import tqdm
8 | import time
9 |
10 | import sys
11 | sys.path.append('./common/')
12 | import models
13 |
14 | parser = argparse.ArgumentParser(description='Script for DispNet testing with corresponding groundTruth',
15 | formatter_class=argparse.ArgumentDefaultsHelpFormatter)
16 | parser.add_argument("--pretrained-dispnet", required=True, type=str, help="pretrained DispNet path")
17 | parser.add_argument("--img-height", default=256, type=int, help="Image height") # 256 (kitti)
18 | parser.add_argument("--img-width", default=320, type=int, help="Image width") # 832 (kitti)
19 | parser.add_argument("--min-depth", default=1e-3)
20 | parser.add_argument("--max-depth", default=80)
21 | parser.add_argument("--dataset-dir", default='.', type=str, help="Dataset directory")
22 | parser.add_argument("--dataset-list", default=None, type=str, help="Dataset list file")
23 | parser.add_argument("--output-dir", default=None, required=True, type=str, help="Output directory for saving predictions in a big 3D numpy file")
24 | parser.add_argument('--resnet-layers', required=True, type=int, default=18, choices=[18, 50], help='depth network architecture.')
25 |
26 | device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
27 |
28 | def load_tensor_image(filename, args):
29 | img = np.expand_dims(imread(filename).astype(np.float32), axis=2)
30 | h,w,_ = img.shape
31 | if (h != args.img_height or w != args.img_width):
32 | img = imresize(img, (args.img_height, args.img_width)).astype(np.float32)
33 | img = np.transpose(img, (2, 0, 1))
34 | img = (torch.from_numpy(img).float() / 2**14)
35 | tensor_img = ((img.unsqueeze(0)-0.45)/0.225).to(device)
36 | return tensor_img
37 |
38 | @torch.no_grad()
39 | def main():
40 | args = parser.parse_args()
41 |
42 | # load models
43 | disp_pose_net = models.DispPoseResNet(args.resnet_layers, False, num_channel=1).to(device)
44 | disp_net = disp_pose_net.DispResNet
45 |
46 | weights = torch.load(args.pretrained_dispnet)
47 | disp_net.load_state_dict(weights['state_dict'])
48 | disp_net.eval()
49 |
50 | dataset_dir = Path(args.dataset_dir)
51 |
52 | # read file list
53 | if args.dataset_list is not None:
54 | with open(args.dataset_list, 'r') as f:
55 | test_files = list(f.read().splitlines())
56 | else:
57 | test_files=sorted((dataset_dir+'Thermal').files('*.png'))
58 |
59 | print('{} files to test'.format(len(test_files)))
60 |
61 | output_dir = Path(args.output_dir)
62 | output_dir.makedirs_p()
63 |
64 | test_disp_avg = 0
65 | test_disp_std = 0
66 | test_depth_avg = 0
67 | test_depth_std = 0
68 |
69 | avg_time = 0
70 | for j in tqdm(range(len(test_files))):
71 | tgt_img = load_tensor_image(test_files[j], args)
72 |
73 | # compute speed
74 | torch.cuda.synchronize()
75 | t_start = time.time()
76 |
77 | output = disp_net(tgt_img)
78 |
79 | torch.cuda.synchronize()
80 | elapsed_time = time.time() - t_start
81 |
82 | avg_time += elapsed_time
83 |
84 | pred_disp = output.squeeze().cpu().numpy()
85 |
86 | if j == 0:
87 | predictions = np.zeros((len(test_files), *pred_disp.shape))
88 | predictions[j] = 1/pred_disp
89 |
90 | test_disp_avg += pred_disp.mean()
91 | test_disp_std += pred_disp.std()
92 | test_depth_avg += predictions.mean()
93 | test_depth_std += predictions.std()
94 |
95 | np.save(output_dir/'predictions.npy', predictions)
96 |
97 | avg_time /= len(test_files)
98 | print('Avg Time: ', avg_time, ' seconds.')
99 | print('Avg Speed: ', 1.0 / avg_time, ' fps')
100 |
101 | print('Avg disp : {0:0.3f}, std disp : {1:0.5f}'.format(test_disp_avg/len(test_files), test_disp_std/len(test_files)))
102 | print('Avg depth: {0:0.3f}, std depth: {1:0.5f}'.format(test_depth_avg/len(test_files), test_depth_std/len(test_files)))
103 |
104 |
105 | if __name__ == '__main__':
106 | main()
107 |
--------------------------------------------------------------------------------
/common/utils/utils.py:
--------------------------------------------------------------------------------
1 | from __future__ import division
2 | import shutil
3 | import numpy as np
4 | import torch
5 | from path import Path
6 | import datetime
7 | from collections import OrderedDict
8 | from matplotlib import cm
9 | from matplotlib.colors import ListedColormap, LinearSegmentedColormap
10 | import matplotlib.pyplot as plt
11 |
12 | def high_res_colormap(low_res_cmap, resolution=1000, max_value=1):
13 | # Construct the list colormap, with interpolated values for higer resolution
14 | # For a linear segmented colormap, you can just specify the number of point in
15 | # cm.get_cmap(name, lutsize) with the parameter lutsize
16 | x = np.linspace(0, 1, low_res_cmap.N)
17 | low_res = low_res_cmap(x)
18 | new_x = np.linspace(0, max_value, resolution)
19 | high_res = np.stack([np.interp(new_x, x, low_res[:, i])
20 | for i in range(low_res.shape[1])], axis=1)
21 | return ListedColormap(high_res)
22 |
23 | def opencv_rainbow(resolution=1000):
24 | # Construct the opencv equivalent of Rainbow
25 | opencv_rainbow_data = (
26 | (0.000, (1.00, 0.00, 0.00)),
27 | (0.400, (1.00, 1.00, 0.00)),
28 | (0.600, (0.00, 1.00, 0.00)),
29 | (0.800, (0.00, 0.00, 1.00)),
30 | (1.000, (0.60, 0.00, 1.00))
31 | )
32 |
33 | return LinearSegmentedColormap.from_list('opencv_rainbow', opencv_rainbow_data, resolution)
34 |
35 | def opencv_rainbow_inv(resolution=1000):
36 | # Construct the opencv equivalent of Rainbow
37 | opencv_rainbow_data = (
38 | (0.000, (0.60, 0.00, 1.00)),
39 | (0.400, (0.00, 0.00, 0.10)),
40 | (0.600, (0.00, 1.00, 0.00)),
41 | (0.800, (1.00, 1.00, 0.00)),
42 | (1.000, (1.00, 0.00, 0.00))
43 | )
44 |
45 | return LinearSegmentedColormap.from_list('opencv_rainbow', opencv_rainbow_data, resolution)
46 |
47 | COLORMAPS = {'rainbow': opencv_rainbow(),
48 | 'rainbow_inv' : plt.get_cmap('jet'), #opencv_rainbow_inv(),
49 | 'magma': high_res_colormap(cm.get_cmap('magma')),
50 | 'magma_inv': high_res_colormap(cm.get_cmap('magma').reversed()),
51 | 'bone': cm.get_cmap('bone', 10000),
52 | 'bone_inv': cm.get_cmap('bone', 10000).reversed()}
53 |
54 | def ind2rgb(im):
55 | cmap = plt.get_cmap('jet')
56 | im = im.cpu().squeeze().numpy()
57 | im = cmap(im)
58 | im = im[:,:,0:3]
59 | # put it from HWC to CHW format
60 | im = np.transpose(im, (2, 0, 1))
61 | return torch.from_numpy(im).float()
62 |
63 | def tensor2array(tensor, max_value=None, colormap='rainbow'):
64 | tensor = tensor.detach().cpu()
65 | if max_value is None:
66 | max_value = tensor[~np.isinf(tensor).type(torch.bool)].max()
67 | tensor[np.isinf(tensor).type(torch.bool)] = max_value
68 | max_value = tensor.max().item()
69 | if tensor.ndimension() == 2 or tensor.size(0) == 1:
70 | norm_array = tensor.squeeze().numpy()/max_value
71 | array = COLORMAPS[colormap](norm_array).astype(np.float32)
72 | array = array.transpose(2, 0, 1)
73 |
74 | elif tensor.ndimension() == 3:
75 | if( tensor.size(0) == 3) :
76 | array = 0.45 + tensor.numpy()*0.225
77 | elif (tensor.size(0) == 2):
78 | array = tensor.numpy()
79 |
80 | return array
81 |
82 | def tensor2array_thermal(tensor):
83 | tensor = tensor.detach().cpu()
84 | array = np.expand_dims(0.45 + tensor.detach().cpu().squeeze().numpy()*0.225, 0)
85 | return array
86 |
87 | def save_checkpoint(save_path, dispnet_state, exp_pose_state, is_depth_best, is_pose_best, filename='checkpoint.pth.tar'):
88 | file_prefixes = ['dispnet', 'exp_pose']
89 | states = [dispnet_state, exp_pose_state]
90 | for (prefix, state) in zip(file_prefixes, states):
91 | torch.save(state, save_path/'{}_{}'.format(prefix, filename))
92 |
93 | if (is_depth_best&is_pose_best):
94 | for prefix in file_prefixes:
95 | shutil.copyfile(save_path/'{}_{}'.format(prefix, filename),
96 | save_path/'{}_both_model_best.pth.tar'.format(prefix))
97 | elif is_depth_best :
98 | for prefix in file_prefixes:
99 | shutil.copyfile(save_path/'{}_{}'.format(prefix, filename),
100 | save_path/'{}_disp_model_best.pth.tar'.format(prefix))
101 | elif is_pose_best :
102 | for prefix in file_prefixes:
103 | shutil.copyfile(save_path/'{}_{}'.format(prefix, filename),
104 | save_path/'{}_pose_model_best.pth.tar'.format(prefix))
105 |
--------------------------------------------------------------------------------
/common/models/resnet_encoder.py:
--------------------------------------------------------------------------------
1 | # Copyright Niantic 2019. Patent Pending. All rights reserved.
2 | #
3 | # This software is licensed under the terms of the Monodepth2 licence
4 | # which allows for non-commercial use only, the full terms of which are made
5 | # available in the LICENSE file.
6 |
7 | from __future__ import absolute_import, division, print_function
8 |
9 | import numpy as np
10 |
11 | import torch
12 | import torch.nn as nn
13 | import torchvision.models as models
14 | import torch.utils.model_zoo as model_zoo
15 |
16 | class ResNetMultiImageInput(models.ResNet):
17 | """Constructs a resnet model with varying number of input images.
18 | Adapted from https://github.com/pytorch/vision/blob/master/torchvision/models/resnet.py
19 | """
20 | def __init__(self, block, layers, num_classes=1000, num_input_images=1, num_channel=3):
21 | super(ResNetMultiImageInput, self).__init__(block, layers)
22 | self.inplanes = 64
23 | self.conv1 = nn.Conv2d(num_input_images * num_channel, 64, kernel_size=7, stride=2, padding=3, bias=False)
24 | self.bn1 = nn.BatchNorm2d(64)
25 | self.relu = nn.ReLU(inplace=True)
26 | self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
27 | self.layer1 = self._make_layer(block, 64, layers[0])
28 | self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
29 | self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
30 | self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
31 |
32 | for m in self.modules():
33 | if isinstance(m, nn.Conv2d):
34 | nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
35 | elif isinstance(m, nn.BatchNorm2d):
36 | nn.init.constant_(m.weight, 1)
37 | nn.init.constant_(m.bias, 0)
38 |
39 |
40 |
41 | def resnet_multiimage_input(num_layers, pretrained=False, num_input_images=1, num_channel=3):
42 | """Constructs a ResNet model.
43 | Args:
44 | num_layers (int): Number of resnet layers. Must be 18 or 50
45 | pretrained (bool): If True, returns a model pre-trained on ImageNet
46 | num_input_images (int): Number of frames stacked as input
47 | """
48 | assert num_layers in [18, 50], "Can only run with 18 or 50 layer resnet"
49 | blocks = {18: [2, 2, 2, 2], 50: [3, 4, 6, 3]}[num_layers]
50 | block_type = {18: models.resnet.BasicBlock, 50: models.resnet.Bottleneck}[num_layers]
51 | model = ResNetMultiImageInput(block_type, blocks, num_input_images=num_input_images, num_channel=num_channel)
52 |
53 | if pretrained:
54 | loaded = model_zoo.load_url(models.resnet.model_urls['resnet{}'.format(num_layers)])
55 | if num_channel == 3:
56 | loaded['conv1.weight'] = torch.cat([loaded['conv1.weight']] * num_input_images, 1) / num_input_images
57 | else :
58 | loaded['conv1.weight'] = torch.cat([loaded['conv1.weight'].mean(1).unsqueeze(1)] * num_input_images, 1) / num_input_images
59 | model.load_state_dict(loaded)
60 | return model
61 |
62 |
63 | class ResnetEncoder(nn.Module):
64 | """Pytorch module for a resnet encoder
65 | """
66 | def __init__(self, num_layers, pretrained, num_input_images=1, num_channel=3):
67 | super(ResnetEncoder, self).__init__()
68 |
69 | self.num_ch_enc = np.array([64, 64, 128, 256, 512])
70 |
71 | resnets = {18: models.resnet18,
72 | 34: models.resnet34,
73 | 50: models.resnet50,
74 | 101: models.resnet101,
75 | 152: models.resnet152}
76 |
77 | if num_layers not in resnets:
78 | raise ValueError("{} is not a valid number of resnet layers".format(num_layers))
79 |
80 | self.encoder = resnet_multiimage_input(num_layers, pretrained, num_input_images, num_channel)
81 | """
82 | if num_input_images > 1:
83 | self.encoder = resnet_multiimage_input(num_layers, pretrained, num_input_images)
84 | else:
85 | self.encoder = resnets[num_layers](pretrained)
86 | """
87 | if num_layers > 34:
88 | self.num_ch_enc[1:] *= 4
89 |
90 | def forward(self, input_image):
91 | self.features = []
92 | x = input_image
93 | x = self.encoder.conv1(x)
94 | x = self.encoder.bn1(x)
95 | self.features.append(self.encoder.relu(x))
96 | self.features.append(self.encoder.layer1(self.encoder.maxpool(self.features[-1])))
97 | self.features.append(self.encoder.layer2(self.features[-1]))
98 | self.features.append(self.encoder.layer3(self.features[-1]))
99 | self.features.append(self.encoder.layer4(self.features[-1]))
100 |
101 | return self.features
--------------------------------------------------------------------------------
/eval_vivid/eval_depth.py:
--------------------------------------------------------------------------------
1 | import argparse
2 | import cv2
3 | import matplotlib as mpl
4 | import matplotlib.cm as cm
5 | import numpy as np
6 | import os
7 | from tqdm import tqdm
8 | from path import Path
9 |
10 | parser = argparse.ArgumentParser(description="Depth options")
11 | parser.add_argument("--dataset", required=True, help="VIVID", choices=['VIVID'], type=str)
12 | parser.add_argument("--scene", required=True, help="scene type for VIVID", choices=['indoor', 'outdoor'], type=str)
13 | parser.add_argument("--pred_depth", required=True, help="depth predictions npy", type=str)
14 | parser.add_argument("--gt_depth", required=True, help="gt depth folder for VIVID", type=str)
15 | parser.add_argument("--ratio_name", help="names for saving ratios", type=str)
16 |
17 |
18 | args = parser.parse_args()
19 |
20 | def compute_depth_errors(gt, pred):
21 | """Computation of error metrics between predicted and ground truth depths
22 | Args:
23 | gt (N): ground truth depth
24 | pred (N): predicted depth
25 | """
26 | thresh = np.maximum((gt / pred), (pred / gt))
27 | a1 = (thresh < 1.25).mean()
28 | a2 = (thresh < 1.25 ** 2).mean()
29 | a3 = (thresh < 1.25 ** 3).mean()
30 |
31 | rmse = (gt - pred) ** 2
32 | rmse = np.sqrt(rmse.mean())
33 | rmse_log = (np.log(gt) - np.log(pred)) ** 2
34 | rmse_log = np.sqrt(rmse_log.mean())
35 |
36 | log10 = np.mean(np.abs((np.log10(gt) - np.log10(pred))))
37 |
38 | abs_rel = np.mean(np.abs(gt - pred) / gt)
39 | sq_rel = np.mean(((gt - pred) ** 2) / gt)
40 |
41 | return abs_rel, sq_rel, rmse, rmse_log, a1, a2, a3
42 |
43 | class DepthEval():
44 | def __init__(self):
45 |
46 | self.min_depth = 1e-3
47 |
48 | if args.dataset == 'VIVID':
49 | if args.scene == 'indoor' :
50 | self.max_depth = 10.
51 | elif args.scene == 'outdoor' :
52 | self.max_depth = 80.
53 |
54 | def main(self):
55 | pred_depths = []
56 |
57 | """ Get result """
58 | # Read precomputed result
59 | pred_depths = np.load(os.path.join(args.pred_depth))
60 |
61 | """ Evaluation """
62 | if args.dataset == 'VIVID':
63 | gt_depths = []
64 | for gt_f in sorted(Path(args.gt_depth).files("*.npy")):
65 | gt_depths.append(np.load(gt_f))
66 |
67 | pred_depths = self.evaluate_depth(gt_depths, pred_depths, eval_mono=True)
68 |
69 |
70 | def evaluate_depth(self, gt_depths, pred_depths, eval_mono=True):
71 | """evaluate depth result
72 | Args:
73 | gt_depths (NxHxW): gt depths
74 | pred_depths (NxHxW): predicted depths
75 | split (str): data split for evaluation
76 | - depth_eigen
77 | eval_mono (bool): use median scaling if True
78 | """
79 | errors = []
80 | ratios = []
81 | resized_pred_depths = []
82 |
83 | print("==> Evaluating depth result...")
84 | for i in tqdm(range(pred_depths.shape[0])):
85 | if pred_depths[i].mean() != -1:
86 | gt_depth = gt_depths[i]
87 | gt_height, gt_width = gt_depth.shape[:2]
88 |
89 | # resizing prediction (based on inverse depth)
90 | pred_inv_depth = 1 / (pred_depths[i] + 1e-6)
91 | pred_inv_depth = cv2.resize(pred_inv_depth, (gt_width, gt_height))
92 | pred_depth = 1 / (pred_inv_depth + 1e-6)
93 |
94 | mask = np.logical_and(gt_depth > self.min_depth, gt_depth < self.max_depth)
95 | val_pred_depth = pred_depth[mask]
96 | val_gt_depth = gt_depth[mask]
97 |
98 | # median scaling is used for monocular evaluation
99 | ratio = 1
100 | if eval_mono:
101 | ratio = np.median(val_gt_depth) / np.median(val_pred_depth)
102 | ratios.append(ratio)
103 | val_pred_depth *= ratio
104 |
105 | resized_pred_depths.append(pred_depth * ratio)
106 |
107 | val_pred_depth[val_pred_depth < self.min_depth] = self.min_depth
108 | val_pred_depth[val_pred_depth > self.max_depth] = self.max_depth
109 |
110 | errors.append(compute_depth_errors(val_gt_depth, val_pred_depth))
111 |
112 | if eval_mono:
113 | ratios = np.array(ratios)
114 | med = np.median(ratios)
115 | print(" Scaling ratios | med: {:0.3f} | std: {:0.3f}".format(med, np.std(ratios / med)))
116 | print(" Scaling ratios | mean: {:0.3f} +- std: {:0.3f}".format(np.mean(ratios), np.std(ratios)))
117 | if args.ratio_name:
118 | np.savetxt(args.ratio_name, ratios, fmt='%.4f')
119 |
120 | mean_errors = np.array(errors).mean(0)
121 | print("\n " + ("{:>8} | " * 7).format("abs_rel", "sq_rel", "rmse", "rmse_log", "a1", "a2", "a3"))
122 | print(("&{: 8.3f} " * 7).format(*mean_errors.tolist()) + "\\\\")
123 |
124 | return resized_pred_depths
125 |
126 |
127 | eval = DepthEval()
128 | eval.main()
129 |
--------------------------------------------------------------------------------
/run_inference.py:
--------------------------------------------------------------------------------
1 | import torch
2 | import torch.backends.cudnn as cudnn
3 | import torch.utils.data
4 |
5 | from imageio import imsave
6 | import numpy as np
7 | from path import Path
8 | import argparse
9 |
10 | import sys
11 | sys.path.append('./common/')
12 |
13 | import models
14 | import utils.custom_transforms as custom_transforms
15 | from utils.utils import tensor2array
16 |
17 | import matplotlib as mpl
18 | import matplotlib.cm as cm
19 |
20 | parser = argparse.ArgumentParser(description='Inference script for DispNet learned with \
21 | Structure from Motion Learner inference on KITTI Dataset',
22 | formatter_class=argparse.ArgumentDefaultsHelpFormatter)
23 |
24 | parser.add_argument('data', metavar='DIR', help='path to dataset')
25 | parser.add_argument("--sequence", default='.', type=str, help="Dataset directory")
26 | parser.add_argument("--output-dir", default='output', type=str, help="Output directory")
27 | parser.add_argument("--img-exts", default='jpg', choices=['png', 'jpg', 'bmp'], nargs='*', type=str, help="images extensions to glob")
28 |
29 | parser.add_argument('--resnet-layers', required=True, type=int, default=18, choices=[18, 50],
30 | help='depth network architecture.')
31 | parser.add_argument('-j', '--workers', default=4, type=int, metavar='N', help='number of data loading workers')
32 | parser.add_argument('-b', '--batch-size', default=1, type=int, metavar='N', help='mini-batch size')
33 |
34 | parser.add_argument('--interval', type=int, help='Interval of sequence', metavar='N', default=1)
35 | parser.add_argument('--sequence_length', type=int, help='Length of sequence', metavar='N', default=3)
36 | parser.add_argument('--pretrained-model', dest='pretrained_model', default=None, metavar='PATH', help='path to pre-trained model')
37 | parser.add_argument('--scene_type', type=str, choices=['indoor', 'outdoor'], default='indoor', required=True)
38 |
39 | device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
40 |
41 | def depth_visualizer(inv_depth):
42 | """
43 | Args:
44 | data (HxW): depth data
45 | Returns:
46 | vis_data (HxWx3): depth visualization (RGB)
47 | """
48 | inv_depth = inv_depth.squeeze().detach().cpu()
49 | vmax = np.percentile(inv_depth, 98)
50 | normalizer = mpl.colors.Normalize(vmin=inv_depth.min(), vmax=vmax)
51 | mapper = cm.ScalarMappable(norm=normalizer, cmap='magma')
52 | vis_data = (mapper.to_rgba(inv_depth)[:, :, :3] * 255).astype(np.uint8)
53 | return vis_data
54 |
55 | @torch.no_grad()
56 | def main():
57 | args = parser.parse_args()
58 |
59 | ArrToTen = custom_transforms.ArrayToTensor(max_value=2**14)
60 | ArrToTen4Loss = custom_transforms.ArrayToTensorWithLocalWindow()
61 | TenThrRearran = custom_transforms.TensorThermalRearrange(bin_num=30, CLAHE_clip=2)
62 | normalize = custom_transforms.Normalize(mean=[0.45, 0.45, 0.45], std=[0.225, 0.225, 0.225])
63 |
64 | transform4input = custom_transforms.Compose([ArrToTen, normalize])
65 | transform4loss = custom_transforms.Compose([ArrToTen4Loss, TenThrRearran, normalize])
66 |
67 | from dataloader.VIVID_validation_folders import ValidationSet
68 | val_set = ValidationSet(
69 | args.data,
70 | tf_input = transform4input,
71 | tf_loss = transform4loss,
72 | sequence_length = args.sequence_length,
73 | interval = args.interval,
74 | scene_type = args.scene_type,
75 | inference_folder=args.sequence,
76 | )
77 |
78 | val_loader = torch.utils.data.DataLoader(
79 | val_set, batch_size=args.batch_size, shuffle=False,
80 | num_workers=args.workers, pin_memory=True)
81 |
82 | # 1. Load models
83 | # create model
84 | print("=> creating model")
85 | disp_pose_net = models.DispPoseResNet(args.resnet_layers, False, num_channel=1).to(device)
86 | disp_net = disp_pose_net.DispResNet
87 |
88 | # load parameters
89 | print("=> using pre-trained weights for DispResNet")
90 | weights = torch.load(args.pretrained_model)
91 | disp_net.load_state_dict(weights['state_dict'])
92 | disp_net.eval()
93 |
94 | # 2. Load dataset
95 | output_dir = Path(args.output_dir+'/'+args.sequence)
96 | output_dir.makedirs_p()
97 | (output_dir/'thr_img').makedirs_p()
98 | (output_dir/'thr_invdepth').makedirs_p()
99 |
100 | disp_net.eval()
101 |
102 | for idx, (tgt_img, tgt_img_vis, depth_gt) in enumerate(val_loader):
103 |
104 | # original validate_with_gt param
105 | tgt_img = tgt_img.to(device)
106 | depth_gt = depth_gt.to(device)
107 |
108 | # compute output
109 | output_disp = disp_net(tgt_img)
110 |
111 | tgt_img_vis = (255*(0.45 + tgt_img_vis.squeeze().detach().cpu().numpy()*0.225)).astype(np.uint8)
112 | tgt_disp = depth_visualizer(output_disp)
113 |
114 | # Save images
115 | file_name = '{:06d}'.format(idx)
116 | imsave(output_dir/'thr_img'/'{}.{}'.format(file_name, args.img_exts), tgt_img_vis)
117 | imsave(output_dir/'thr_invdepth'/'{}.{}'.format(file_name, args.img_exts), tgt_disp)
118 |
119 | if __name__ == '__main__':
120 | main()
121 |
--------------------------------------------------------------------------------
/dataloader/VIVID_validation_folders.py:
--------------------------------------------------------------------------------
1 | import torch
2 | import torch.utils.data as data
3 | import numpy as np
4 |
5 | import math
6 | import random
7 | from imageio import imread
8 | from path import Path
9 |
10 | def load_as_float(path):
11 | return np.expand_dims(imread(path).astype(np.float32), axis=2) # HW -> HW1
12 |
13 | class ValidationSet(data.Dataset):
14 | """A sequence data loader where the files are arranged in this way:
15 | root/scene_1/Thermal/0000000.jpg
16 | root/scene_1/Depth/0000000.npy
17 | root/scene_1/Thermal/0000001.jpg
18 | root/scene_1/Depth/0000001.npy
19 | ..
20 | root/scene_2/0000000.jpg
21 | root/scene_2/0000000.npy
22 | .
23 |
24 | transform functions must take in a list a images and a numpy array which can be None
25 | """
26 |
27 | def __init__(self, root, tf_input=None, tf_loss=None, inference_folder = '', sequence_length=3, interval=1, scene_type='indoor'):
28 | self.root = Path(root)
29 |
30 | if inference_folder == '' :
31 | if scene_type == 'indoor':
32 | folder_list_path = self.root/'val_indoor.txt'
33 | elif scene_type == 'outdoor':
34 | folder_list_path = self.root/'val_outdoor.txt'
35 | self.folders = [self.root/folder[:-1] for folder in open(folder_list_path)]
36 | else:
37 | self.folders = [self.root/inference_folder]
38 |
39 | self.tf_input = tf_input
40 | self.tf_loss = tf_loss
41 |
42 | self.crawl_folders(sequence_length, interval)
43 |
44 | def crawl_folders(self, sequence_length=3, interval=1):
45 | sequence_set = []
46 | demi_length = (sequence_length-1)//2 + interval - 1
47 | shifts = list(range(-demi_length, demi_length + 1))
48 | for i in range(1, 2*demi_length):
49 | shifts.pop(1)
50 |
51 | for folder in self.folders:
52 | imgs = sorted((folder/"Thermal").files('*.png'))
53 | for i in range(demi_length, len(imgs)-demi_length):
54 | depth = folder/"Depth_T"/(imgs[i].name[:-4] + '.npy')
55 | sample = {'tgt_img': imgs[i], 'tgt_depth': depth }
56 | sequence_set.append(sample)
57 |
58 | self.samples = sequence_set
59 |
60 | def __getitem__(self, index):
61 | sample = self.samples[index]
62 | tgt_img = load_as_float(sample['tgt_img'])
63 | depth = np.load(sample['tgt_depth']).astype(np.float32)
64 |
65 | img_input, _ = self.tf_input([tgt_img], None)
66 | img_loss, _ = self.tf_loss([tgt_img], None) # used for visualization only
67 |
68 | tgt_img_input = img_input[0]
69 | tgt_img_loss = img_loss[0]
70 |
71 | return tgt_img_input, tgt_img_loss, depth
72 |
73 | def __len__(self):
74 | return len(self.samples)
75 |
76 |
77 | class ValidationSetPose(data.Dataset):
78 | """A sequence data loader where the files are arranged in this way:
79 | root/scene_1/Thermal/0000000.jpg
80 | root/scene_1/Depth/0000000.npy
81 | root/scene_1/Thermal/0000001.jpg
82 | root/scene_1/Depth/0000001.npy
83 | ..
84 | root/scene_2/0000000.jpg
85 | root/scene_2/0000000.npy
86 | .
87 |
88 | transform functions must take in a list a images and a numpy array which can be None
89 | """
90 | def __init__(self, root, tf_input=None, sequence_length=3, interval=1, scene_type='indoor'):
91 | self.root = Path(root)
92 | if scene_type == 'indoor':
93 | scene_list_path = self.root/'val_indoor.txt'
94 | elif scene_type == 'outdoor':
95 | scene_list_path = self.root/'val_outdoor.txt'
96 |
97 | self.folders = [self.root/folder[:-1] for folder in open(scene_list_path)]
98 | self.tf_input = tf_input
99 | self.crawl_folders(sequence_length, step=1)
100 |
101 | def crawl_folders(self, sequence_length=3, step=1):
102 | sequence_set = []
103 | demi_length = (sequence_length - 1) // 2
104 | shift_range = np.array([step*i for i in range(-demi_length, demi_length + 1)]).reshape(1, -1)
105 |
106 | for folder in self.folders:
107 | imgs = sorted((folder/"Thermal").files('*.png'))
108 | poses = np.genfromtxt(folder/'poses_T.txt').astype(np.float64).reshape(-1, 3, 4)
109 |
110 | # construct 5-snippet sequences
111 | tgt_indices = np.arange(demi_length, len(imgs) - demi_length).reshape(-1, 1)
112 | snippet_indices = shift_range + tgt_indices
113 |
114 | for indices in snippet_indices :
115 | sample = {'imgs' : [], 'poses' : []}
116 | for i in indices :
117 | sample['imgs'].append(imgs[i])
118 | sample['poses'].append(poses[i])
119 | sequence_set.append(sample)
120 |
121 | self.samples = sequence_set
122 |
123 | def __getitem__(self, index):
124 | sample = self.samples[index]
125 | imgs = [load_as_float(img) for img in sample['imgs']]
126 | imgs, _ = self.tf_input(imgs, None)
127 |
128 | poses = np.stack([pose for pose in sample['poses']])
129 | first_pose = poses[0]
130 | poses[:,:,-1] -= first_pose[:,-1]
131 | compensated_poses = np.linalg.inv(first_pose[:,:3]) @ poses
132 |
133 | return imgs, compensated_poses
134 |
135 | def __len__(self):
136 | return len(self.samples)
137 |
--------------------------------------------------------------------------------
/test_pose.py:
--------------------------------------------------------------------------------
1 | import torch
2 | from skimage.transform import resize as imresize
3 | import numpy as np
4 | from path import Path
5 | import argparse
6 | from tqdm import tqdm
7 | # from imageio import imread
8 |
9 | import sys
10 | sys.path.append('./common/')
11 | import models
12 | from loss.inverse_warp import pose_vec2mat
13 |
14 | parser = argparse.ArgumentParser(description='Script for PoseNet testing with corresponding groundTruth from KITTI Odometry',
15 | formatter_class=argparse.ArgumentDefaultsHelpFormatter)
16 | parser.add_argument("--pretrained-posenet", required=True, type=str, help="pretrained PoseNet path")
17 | parser.add_argument("--img-height", default=256, type=int, help="Image height")
18 | parser.add_argument("--img-width", default=320, type=int, help="Image width")
19 | parser.add_argument("--no-resize", action='store_true', help="no resizing is done")
20 |
21 | parser.add_argument("--dataset-dir", type=str, help="Dataset directory")
22 | parser.add_argument('--sequence-length', type=int, metavar='N', help='sequence length for testing', default=5)
23 | parser.add_argument("--sequences", default=['indoor_aggresive_dark'], type=str, nargs='*', help="sequences to test")
24 | parser.add_argument("--output-dir", default=None, type=str, help="Output directory for saving predictions in a big 3D numpy file")
25 | parser.add_argument('--resnet-layers', required=True, type=int, default=18, choices=[18, 50], help='depth network architecture.')
26 |
27 | device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
28 |
29 | def load_tensor_image(img, args):
30 | h,w,_ = img.shape
31 | if (h != args.img_height or w != args.img_width):
32 | img = imresize(img, (args.img_height, args.img_width)).astype(np.float32)
33 | img = np.transpose(img, (2, 0, 1))
34 | img = (torch.from_numpy(img).float() / 2**14)
35 | tensor_img = ((img.unsqueeze(0)-0.45)/0.225).to(device)
36 | return tensor_img
37 |
38 | @torch.no_grad()
39 | def main():
40 | args = parser.parse_args()
41 |
42 | # load models
43 | disp_pose_net = models.DispPoseResNet(args.resnet_layers, False, num_channel=1).to(device)
44 | pose_net = disp_pose_net.PoseResNet
45 |
46 | weights = torch.load(args.pretrained_posenet)
47 | pose_net.load_state_dict(weights['state_dict'], strict=False)
48 | pose_net.eval()
49 |
50 | seq_length = 5
51 |
52 | # load data loader
53 | from eval_vivid.pose_evaluation_utils import test_framework_VIVID as test_framework
54 | dataset_dir = Path(args.dataset_dir)
55 | framework = test_framework(dataset_dir, args.sequences, seq_length=seq_length, step=1)
56 |
57 | print('{} snippets to test'.format(len(framework)))
58 | errors = np.zeros((len(framework), 2), np.float32)
59 | if args.output_dir is not None:
60 | output_dir = Path(args.output_dir)
61 | output_dir.makedirs_p()
62 | predictions_array = np.zeros((len(framework), seq_length, 3, 4))
63 |
64 | for j, sample in enumerate(tqdm(framework)):
65 | imgs = sample['imgs']
66 | squence_imgs = []
67 | for i, img in enumerate(imgs):
68 | img = load_tensor_image(img, args)
69 | squence_imgs.append(img)
70 |
71 | global_pose = np.eye(4)
72 | poses = []
73 | poses.append(global_pose[0:3, :])
74 |
75 | for iter in range(seq_length - 1):
76 | pose = pose_net(squence_imgs[iter], squence_imgs[iter + 1])
77 | pose_mat = pose_vec2mat(pose).squeeze(0).cpu().numpy()
78 |
79 | pose_mat = np.vstack([pose_mat, np.array([0, 0, 0, 1])])
80 | global_pose = global_pose @ np.linalg.inv(pose_mat)
81 | poses.append(global_pose[0:3, :])
82 |
83 | final_poses = np.stack(poses, axis=0)
84 |
85 | if args.output_dir is not None:
86 | predictions_array[j] = final_poses
87 |
88 | ATE, RE = compute_pose_error(sample['poses'], final_poses)
89 | errors[j] = ATE, RE
90 |
91 | mean_errors = errors.mean(0)
92 | std_errors = errors.std(0)
93 | error_names = ['ATE', 'RE']
94 | print('')
95 | print("Results")
96 | print("\t {:>10}, {:>10}".format(*error_names))
97 | print("mean \t {:10.4f}, {:10.4f}".format(*mean_errors))
98 | print("std \t {:10.4f}, {:10.4f}".format(*std_errors))
99 |
100 | if args.output_dir is not None:
101 | np.save(output_dir/'predictions.npy', predictions_array)
102 |
103 | def compute_pose_error(gt, pred):
104 | RE = 0
105 | snippet_length = gt.shape[0]
106 | scale_factor = np.sum(gt[:, :, -1] * pred[:, :, -1])/np.sum(pred[:, :, -1] ** 2)
107 | ATE = np.linalg.norm((gt[:, :, -1] - scale_factor * pred[:, :, -1]).reshape(-1))
108 | for gt_pose, pred_pose in zip(gt, pred):
109 | # Residual matrix to which we compute angle's sin and cos
110 | R = gt_pose[:, :3] @ np.linalg.inv(pred_pose[:, :3])
111 | s = np.linalg.norm([R[0, 1]-R[1, 0],
112 | R[1, 2]-R[2, 1],
113 | R[0, 2]-R[2, 0]])
114 | c = np.trace(R) - 1
115 | # Note: we actually compute double of cos and sin, but arctan2 is invariant to scale
116 | RE += np.arctan2(s, c)
117 |
118 | return ATE/snippet_length, RE/snippet_length
119 |
120 |
121 | def compute_pose(pose_net, tgt_img, ref_imgs):
122 | poses = []
123 | for ref_img in ref_imgs:
124 | pose = pose_net(tgt_img, ref_img).unsqueeze(1)
125 | poses.append(pose)
126 | poses = torch.cat(poses, 1)
127 | return poses
128 |
129 |
130 | if __name__ == '__main__':
131 | main()
132 |
--------------------------------------------------------------------------------
/common/utils/custom_transforms.py:
--------------------------------------------------------------------------------
1 | from __future__ import division
2 | import torch
3 | import random
4 | import numpy as np
5 | import cv2
6 |
7 | '''Set of tranform random routines that takes list of inputs as arguments,
8 | in order to have random but coherent transformations.'''
9 |
10 | class Compose(object):
11 | def __init__(self, transforms):
12 | self.transforms = transforms
13 |
14 | def __call__(self, images, intrinsics):
15 | for t in self.transforms:
16 | images, intrinsics = t(images, intrinsics)
17 | return images, intrinsics
18 |
19 | class Normalize(object):
20 | def __init__(self, mean, std):
21 | self.mean = mean
22 | self.std = std
23 |
24 | def __call__(self, images, intrinsics):
25 | for tensor in images:
26 | for t, m, s in zip(tensor, self.mean, self.std):
27 | t.sub_(m).div_(s)
28 | return images, intrinsics
29 |
30 | class ArrayToTensor(object):
31 | """Converts a list of numpy.ndarray (H x W x C) along with a intrinsics matrix to a list of torch.FloatTensor of shape (C x H x W) with a intrinsics tensor."""
32 | def __init__(self, max_value=255):
33 | self.max_value = max_value
34 |
35 | def __call__(self, images, intrinsics):
36 | tensors = []
37 | for im in images:
38 | # put it from HWC to CHW format
39 | im = np.transpose(im, (2, 0, 1))
40 | # handle numpy array
41 | tensors.append(torch.from_numpy(im).float()/self.max_value)
42 | return tensors, intrinsics
43 |
44 |
45 | class ArrayToTensorWithLocalWindow(object):
46 | """Converts a list of numpy.ndarray (H x W x C) along with a intrinsics matrix to a list of torch.FloatTensor of shape (C x H x W) with a intrinsics tensor."""
47 | def __init__(self, trust_ratio=1.00):
48 | self.max_ratio = trust_ratio
49 | self.min_ratio = 1.0-trust_ratio
50 |
51 | def __call__(self, images, intrinsics):
52 | tensors = []
53 | # Decide min-max values of local image window
54 | tmin = 0
55 | tmax = 0
56 | for im in images :
57 | im = im.squeeze() #HW
58 | im_srt = np.sort(im.reshape(-1))
59 | tmax += im_srt[round(len(im_srt)*self.max_ratio)-1]
60 | tmin += im_srt[round(len(im_srt)*self.min_ratio)]
61 | tmax /= len(images)
62 | tmin /= len(images)
63 |
64 | for im in images:
65 | # put it from HWC to CHW format
66 | im = np.transpose(im, (2, 0, 1))
67 | im = torch.clamp(torch.from_numpy(im).float(), tmin, tmax)
68 | tensors.append((im - tmin)/(tmax - tmin)) #CHW
69 | return tensors, intrinsics
70 |
71 | class TensorThermalRearrange(object):
72 | def __init__(self, bin_num = 30, CLAHE_clip = 2, CLAHE_tilesize = 8):
73 | self.bins = bin_num
74 | self.CLAHE = cv2.createCLAHE(clipLimit=CLAHE_clip, tileGridSize=(CLAHE_tilesize,CLAHE_tilesize))
75 | def __call__(self, images, intrinsics):
76 | imgs = []
77 |
78 | tmp_img = torch.cat(images, axis=0)
79 | hist = torch.histc(tmp_img, bins=self.bins)
80 | imgs_max = tmp_img.max()
81 | imgs_min = tmp_img.min()
82 | itv = (imgs_max - imgs_min)/self.bins
83 | total_num = hist.sum()
84 |
85 | for im in images : #CHW
86 | _,H,W = im.shape
87 | mul_mask_ = torch.zeros((self.bins,H,W))
88 | sub_mask_ = torch.zeros((self.bins,H,W))
89 | subhist_new_min = imgs_min.clone()
90 |
91 | for x in range(0,self.bins) :
92 | subhist = (im > imgs_min+itv*x) & (im <= imgs_min+itv*(x+1))
93 | if (subhist.sum() == 0):
94 | continue
95 | subhist_new_itv = hist[x]/total_num
96 | mul_mask_[x,...] = subhist * (subhist_new_itv / itv)
97 | sub_mask_[x,...] = subhist * (subhist_new_itv / itv * -(imgs_min+itv*x) + subhist_new_min)
98 | subhist_new_min += subhist_new_itv
99 |
100 | mul_mask = mul_mask_.sum(axis=0, keepdim=True).detach()
101 | sub_mask = sub_mask_.sum(axis=0, keepdim=True).detach()
102 | im_ = mul_mask*im + sub_mask
103 |
104 | im_ = self.CLAHE.apply((im_.squeeze()*255).numpy().astype(np.uint8)).astype(np.float32)
105 | im_ = np.expand_dims(im_, axis=2)
106 | img_out = torch.from_numpy(np.transpose(im_/255., (2, 0, 1)))
107 | imgs.append(img_out) #CHW
108 | return imgs, intrinsics
109 |
110 | class RandomHorizontalFlip(object):
111 | """Randomly horizontally flips the given numpy array with a probability of 0.5"""
112 |
113 | def __call__(self, images, intrinsics):
114 | assert intrinsics is not None
115 | if random.random() < 0.5:
116 | output_intrinsics = np.copy(intrinsics)
117 | output_images = [np.copy(np.fliplr(im)) for im in images]
118 | w = output_images[0].shape[1]
119 | output_intrinsics[:, 0, 2] = w - output_intrinsics[:, 0, 2]
120 | else:
121 | output_images = images
122 | output_intrinsics = intrinsics
123 | return output_images, output_intrinsics
124 |
125 | class RandomScaleCrop(object):
126 | """Randomly zooms images up to 15% and crop them to keep same size as before."""
127 |
128 | def __call__(self, images, intrinsics):
129 | assert intrinsics is not None
130 | output_intrinsics = np.copy(intrinsics)
131 |
132 | in_h, in_w, ch = images[0].shape
133 | x_scaling, y_scaling = np.random.uniform(1, 1.15, 2)
134 | scaled_h, scaled_w = int(in_h * y_scaling), int(in_w * x_scaling)
135 |
136 | output_intrinsics[:,0] *= x_scaling
137 | output_intrinsics[:,1] *= y_scaling
138 |
139 | if ch == 1:
140 | scaled_images = [np.expand_dims(cv2.resize(im, (scaled_w, scaled_h)), axis=2) for im in images]
141 | else :
142 | scaled_images = [cv2.resize(im, (scaled_w, scaled_h)) for im in images]
143 |
144 | offset_y = np.random.randint(scaled_h - in_h + 1)
145 | offset_x = np.random.randint(scaled_w - in_w + 1)
146 | cropped_images = [im[offset_y:offset_y + in_h, offset_x:offset_x + in_w] for im in scaled_images]
147 |
148 | output_intrinsics[:, 0, 2] -= offset_x
149 | output_intrinsics[:, 1, 2] -= offset_y
150 |
151 | return cropped_images, output_intrinsics
--------------------------------------------------------------------------------
/common/data_prepare/prepare_train_data_VIVID.py:
--------------------------------------------------------------------------------
1 | import argparse
2 | import scipy.misc
3 | import numpy as np
4 | from pebble import ProcessPool
5 | import sys
6 | from tqdm import tqdm
7 | from path import Path
8 | import cv2
9 | import shutil
10 |
11 | parser = argparse.ArgumentParser()
12 | parser.add_argument("dataset_dir", metavar='DIR',
13 | help='path to original dataset')
14 | parser.add_argument("--with-depth", action='store_true',
15 | help="If available, will store depth ground truth along with images, for validation")
16 | parser.add_argument("--with-pose", action='store_true',
17 | help="If available, will store pose ground truth along with images, for validation")
18 | parser.add_argument("--no-train-gt", action='store_true',
19 | help="If selected, will delete ground truth depth to save space")
20 | parser.add_argument("--dump-root", type=str, default='dump', help="Where to dump the data")
21 | parser.add_argument("--height", type=int, default=256, help="image height")
22 | parser.add_argument("--width", type=int, default=320, help="image width")
23 | parser.add_argument("--num-threads", type=int, default=4, help="number of threads to use")
24 |
25 | args = parser.parse_args()
26 |
27 | def dump_example(args, scene):
28 | scene_name = scene.split('/')[-1]
29 | scene_data = data_loader.collect_scenes(scene,)
30 | dump_dir = args.dump_root/scene_data['rel_path']
31 | dump_dir.makedirs_p()
32 | dump_dir_ther = dump_dir/"Thermal"
33 | dump_dir_rgb = dump_dir/"RGB"
34 | dump_dir_depth_T = dump_dir/"Depth_T"
35 | dump_dir_depth_RGB = dump_dir/"Depth_RGB"
36 | dump_dir_ther.makedirs_p()
37 | dump_dir_rgb.makedirs_p()
38 | dump_dir_depth_T.makedirs_p()
39 | dump_dir_depth_RGB.makedirs_p()
40 |
41 | # save intrinsic param
42 | intrinsics_T = scene_data['intrinsics_T']
43 | dump_cam_file = dump_dir/'cam_T.txt'
44 | np.savetxt(dump_cam_file, intrinsics_T)
45 |
46 | intrinsics_RGB = scene_data['intrinsics_RGB']
47 | dump_cam_file = dump_dir/'cam_RGB.txt'
48 | np.savetxt(dump_cam_file, intrinsics_RGB)
49 |
50 | extrinsics_T2RGB = scene_data['Tr_T2RGB']
51 | dump_cam_file = dump_dir/'Tr_T2RGB.txt'
52 | np.savetxt(dump_cam_file, extrinsics_T2RGB)
53 |
54 | poses_T_file = dump_dir/'poses_T.txt'
55 | poses_RGB_file = dump_dir/'poses_RGB.txt'
56 |
57 | poses_T = []
58 | poses_RGB = []
59 |
60 | # save each files + pose + depth
61 | for sample in data_loader.get_scene_imgs(scene_data):
62 | frame_nb = sample["id"]
63 | cv2.imwrite(dump_dir_rgb/'{}.png'.format(frame_nb), sample['Img_RGB'])
64 | cv2.imwrite(dump_dir_ther/'{}.png'.format(frame_nb), sample['Img_Ther'])
65 |
66 | if "pose_T" in sample.keys():
67 | poses_T.append(sample["pose_T"].tolist())
68 | poses_RGB.append(sample["pose_RGB"].tolist())
69 | if "depth_T" in sample.keys():
70 | dump_depth_T_file = dump_dir_depth_T/'{}.npy'.format(frame_nb)
71 | np.save(dump_depth_T_file, sample["depth_T"])
72 | dump_depth_RGB_file = dump_dir_depth_RGB/'{}.npy'.format(frame_nb)
73 | np.save(dump_depth_RGB_file, sample["depth_RGB"])
74 |
75 | if len(poses_T) != 0:
76 | np.savetxt(poses_T_file, np.array(poses_T).reshape(-1, 12), fmt='%.6e')
77 | np.savetxt(poses_RGB_file, np.array(poses_RGB).reshape(-1, 12), fmt='%.6e')
78 |
79 | if len(dump_dir_rgb.files('*.png')) < 3:
80 | dump_dir.rmtree()
81 |
82 | def extract_well_lit_images(args):
83 | tgt_dir = args.dump_root/'indoor_robust_varying'
84 | dump_dir = args.dump_root/'indoor_robust_varying_well_lit'
85 | dump_dir.makedirs_p()
86 | dump_dir_ther = dump_dir/"Thermal"
87 | dump_dir_rgb = dump_dir/"RGB"
88 | dump_dir_depth_T = dump_dir/"Depth_T"
89 | dump_dir_depth_RGB = dump_dir/"Depth_RGB"
90 | dump_dir_ther.makedirs_p()
91 | dump_dir_rgb.makedirs_p()
92 | dump_dir_depth_T.makedirs_p()
93 | dump_dir_depth_RGB.makedirs_p()
94 |
95 | # read well-lit image list
96 | img_list = np.genfromtxt('./common/data_prepare/well_lit_from_varying.txt').astype(int) #
97 |
98 | for frame_nb in img_list :
99 | dump_img_T_file = dump_dir_ther/'{:06d}.png'.format(frame_nb)
100 | dump_img_RGB_file = dump_dir_rgb/'{:06d}.png'.format(frame_nb)
101 | dump_depth_T_file = dump_dir_depth_T/'{:06d}.npy'.format(frame_nb)
102 | dump_depth_RGB_file = dump_dir_depth_RGB/'{:06d}.npy'.format(frame_nb)
103 |
104 | shutil.copy(tgt_dir/"Thermal"/'{:06d}.png'.format(frame_nb), dump_img_T_file)
105 | shutil.copy(tgt_dir/"RGB"/'{:06d}.png'.format(frame_nb), dump_img_RGB_file)
106 | shutil.copy(tgt_dir/"Depth_T"/'{:06d}.npy'.format(frame_nb), dump_depth_T_file)
107 | shutil.copy(tgt_dir/"Depth_RGB"/'{:06d}.npy'.format(frame_nb), dump_depth_RGB_file)
108 |
109 | def main():
110 | args.dump_root = Path(args.dump_root)
111 | args.dump_root.mkdir_p()
112 |
113 | global data_loader
114 |
115 | from VIVID_raw_loader import VIVIDRawLoader
116 | data_loader = VIVIDRawLoader(args.dataset_dir,
117 | img_height=args.height,
118 | img_width=args.width,
119 | get_depth=args.with_depth,
120 | get_pose=args.with_pose)
121 |
122 | n_scenes = len(data_loader.scenes)
123 | print('Found {} potential scenes'.format(n_scenes))
124 | print('Retrieving frames')
125 | if args.num_threads == 1:
126 | for scene in tqdm(data_loader.scenes):
127 | dump_example(args, scene)
128 | else:
129 | with ProcessPool(max_workers=args.num_threads) as pool:
130 | tasks = pool.map(dump_example, [args]*n_scenes, data_loader.scenes)
131 | try:
132 | for _ in tqdm(tasks.result(), total=n_scenes):
133 | pass
134 | except KeyboardInterrupt as e:
135 | tasks.cancel()
136 | raise e
137 |
138 | print('Extracting well-lit image from varying illumination set')
139 | extract_well_lit_images(args)
140 |
141 | print('Generating train val lists')
142 | with open(args.dump_root / 'train_indoor.txt', 'w') as tf:
143 | for seq in data_loader.indoor_train_list :
144 | tf.write('{}\n'.format(seq))
145 | with open(args.dump_root / 'val_indoor.txt', 'w') as tf:
146 | for seq in data_loader.indoor_val_list :
147 | tf.write('{}\n'.format(seq))
148 | with open(args.dump_root / 'test_indoor.txt', 'w') as tf:
149 | for seq in data_loader.indoor_test_list :
150 | tf.write('{}\n'.format(seq))
151 | with open(args.dump_root / 'train_outdoor.txt', 'w') as tf:
152 | for seq in data_loader.outdoor_train_list :
153 | tf.write('{}\n'.format(seq))
154 | with open(args.dump_root / 'val_outdoor.txt', 'w') as tf:
155 | for seq in data_loader.outdoor_val_list :
156 | tf.write('{}\n'.format(seq))
157 | with open(args.dump_root / 'test_outdoor.txt', 'w') as tf:
158 | for seq in data_loader.outdoor_test_list :
159 | tf.write('{}\n'.format(seq))
160 |
161 | print('Done!')
162 |
163 | if __name__ == '__main__':
164 | main()
165 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # Maximizing Self-supervision from Thermal Image for Effective Self-supervised Learning of Depth and Ego-motion
2 |
3 | This github is a official implementation of the paper:
4 |
5 | >Maximizing Self-supervision from Thermal Image for Effective Self-supervised Learning of Depth and Ego-motion
6 | >
7 | >[Ukcheol Shin](https://ukcheolshin.github.io/), [Kyunghyun Lee](https://scholar.google.co.kr/citations?user=WOBfTQoAAAAJ&hl=ko&oi=ao), [Byeong-Uk Lee](https://sites.google.com/view/bulee), In So Kweon
8 | >
9 | >**Robotics and Automation Letter 2022 & IROS 2022**
10 | >
11 | >[[PDF](https://arxiv.org/abs/2201.04387)] [[Project webpage](https://sites.google.com/view/thermal-monodepth-project-page)] [[Full paper](https://arxiv.org/abs/2201.04387)] [[Youtube](https://youtu.be/qIBcOuLYr70)]
12 |
13 | ## Introduction
14 | Recently, self-supervised learning of depth and ego-motion from thermal images shows strong robustness and reliability under challenging lighting and weather conditions.
15 | However, the inherent thermal image properties such as weak contrast, blurry edges, and noise hinder to generate effective self-supervision from thermal images.
16 | Therefore, most previous researches just rely on additional self-supervisory sources such as RGB video, generative models, and Lidar information.
17 | In this paper, we conduct an in-depth analysis of thermal image characteristics that degenerates self-supervision from thermal images.
18 | Based on the analysis, we propose an effective thermal image mapping method that significantly increases image information, such as overall structure, contrast, and details, while preserving temporal consistency.
19 | By resolving the fundamental problem of the thermal image, our depth and pose network trained only with thermal images achieves state-of-the-art results without utilizing any extra self-supervisory source.
20 | As our best knowledge, this work is the first self-supervised learning approach to train monocular depth and relative pose networks with only thermal images.
21 |
22 |
23 |  24 |
24 |  25 |
25 |
26 |
27 |
28 |  29 |
29 |
30 |
31 |  32 |
32 |
33 |
34 | Please refer to the video for more descriptions and visual results.
35 |
36 | [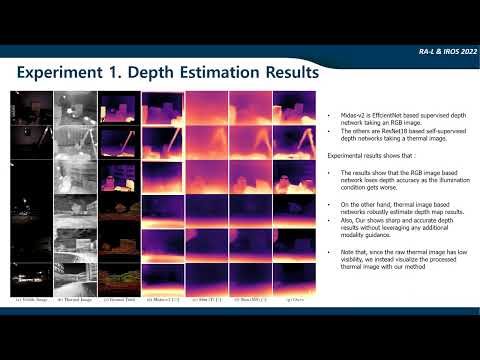](https://youtu.be/oNu_YVf8sCc)
37 |
38 | ## Main Results
39 |
40 | ### Depth Results
41 |
42 | #### Indoor test set (Well-lit)
43 |
44 | | Models | Abs Rel | Sq Rel | RMSE | RMSE(log) | Acc.1 | Acc.2 | Acc.3 |
45 | |------------|---------|--------|-------|-----------|-------|-------|-------|
46 | | Shin(T) | 0.225 | 0.201 | 0.709 | 0.262 | 0.620 | 0.920 | 0.993 |
47 | | Shin(MS) | 0.156 | 0.111 | 0.527 | 0.197 | 0.783 | 0.975 | 0.997 |
48 | | Ours | 0.152 | 0.121 | 0.538 | 0.196 | 0.814 | 0.965 | 0.992 |
49 |
50 | #### Indoor test set (Low-/Zero- light)
51 |
52 | | Models | Abs Rel | Sq Rel | RMSE | RMSE(log) | Acc.1 | Acc.2 | Acc.3 |
53 | |------------|---------|--------|-------|-----------|-------|-------|-------|
54 | | Shin(T) | 0.232 | 0.222 | 0.740 | 0.268 | 0.618 | 0.907 | 0.987 |
55 | | Shin(MS) | 0.166 | 0.129 | 0.566 | 0.207 | 0.768 | 0.967 | 0.994 |
56 | | Ours | 0.149 | 0.109 | 0.517 | 0.192 | 0.813 | 0.969 | 0.994 |
57 |
58 | #### Outdoor test set (Night-time)
59 |
60 | | Models | Abs Rel | Sq Rel | RMSE | RMSE(log) | Acc.1 | Acc.2 | Acc.3 |
61 | |------------|---------|--------|-------|-----------|-------|-------|-------|
62 | | Shin(T) | 0.157 | 1.179 | 5.802 | 0.211 | 0.750 | 0.948 | 0.985 |
63 | | Shin(MS) | 0.146 | 0.873 | 4.697 | 0.184 | 0.801 | 0.973 | 0.993 |
64 | | Ours | 0.109 | 0.703 | 4.132 | 0.150 | 0.887 | 0.980 | 0.994 |
65 |
66 |
67 | ### Pose Estimation Results
68 |
69 | #### Indoor-static-dark
70 |
71 | |Metric | ATE | RE |
72 | |---------------------|---------|---------|
73 | | Shin(T) | 0.0063 | 0.0092 |
74 | | Shin(MS) | 0.0057 | 0.0089 |
75 | | Ours | 0.0059 | 0.0082 |
76 |
77 | #### Outdoor-night1
78 |
79 | |Metric | ATE | RE |
80 | |---------------------|---------|---------|
81 | | Shin(T) | 0.0571 | 0.0280 |
82 | | Shin(MS) | 0.0562 | 0.0287 |
83 | | Ours | 0.0546 | 0.0287 |
84 |
85 | ## Getting Started
86 |
87 | ### Prerequisite
88 | This codebase was developed and tested with python 3.7, Pytorch 1.5.1, and CUDA 10.2 on Ubuntu 16.04.
89 |
90 | ```bash
91 | conda env create --file environment.yml
92 | ```
93 |
94 | ### Pre-trained Model
95 | Our pre-trained models are availabe in this [link](https://drive.google.com/drive/folders/1ne2yyGMifciHG3uXj6xjc4q_KtX8z4Ki?usp=sharing)
96 |
97 | ### Datasets
98 |
99 | For ViViD Raw dataset, download the dataset provided on the [official website](https://sites.google.com/view/dgbicra2019-vivid/).
100 |
101 | For our post-processed dataset, please refer to [this Github page](https://github.com/UkcheolShin/ThermalSfMLearner-MS).
102 |
103 | After download our post-processed dataset, unzip the files to form the below structure.
104 |
105 | #### Expected dataset structure for the post-processed ViViD dataset:
106 | ```
107 | KAIST_VIVID/
108 | calibration/
109 | cali_ther_to_rgb.yaml, ...
110 | indoor_aggressive_local/
111 | RGB/
112 | data/
113 | 000001.png, 000002.png, ...
114 | timestamps.txt
115 | Thermal/
116 | data/
117 | timestamps.txt
118 | Lidar/
119 | data/
120 | timestamps.txt
121 | Warped_Depth/
122 | data/
123 | timestamps.txt
124 | avg_velocity_thermal.txt
125 | poses_thermal.txt
126 | ...
127 | indoor_aggressive_global/
128 | ...
129 | outdoor_robust_day1/
130 | ...
131 | outdoor_robust_night1/
132 | ...
133 | ```
134 |
135 | Upon the above dataset structure, you can generate training/testing dataset by running the script.
136 | ```bash
137 | sh scripts/prepare_vivid_data.sh
138 | ```
139 |
140 | ### Training
141 |
142 | The "scripts" folder provides several examples for training, testing, and visualization.
143 |
144 | You can train the depth and pose model on vivid dataset by running
145 | ```bash
146 | sh scripts/train_vivid_resnet18_indoor.sh
147 | sh scripts/train_vivid_resnet18_outdoor.sh
148 | ```
149 | Then you can start a `tensorboard` session in this folder by
150 | ```bash
151 | tensorboard --logdir=checkpoints/
152 | ```
153 | and visualize the training progress by opening [https://localhost:6006](https://localhost:6006) on your browser.
154 |
155 |
156 | ### Evaluation
157 |
158 | You can evaluate depth and pose by running
159 | ```bash
160 | bash scripts/test_vivid_indoor.sh
161 | bash scripts/test_vivid_outdoor.sh
162 | ```
163 | and visualize depth by running
164 | ```bash
165 | bash scripts/run_vivid_inference.sh
166 | ```
167 | You can comprehensively see the overall results by running
168 | ```bash
169 | bash scripts/display_result.sh
170 | ```
171 |
172 | ## Citation
173 | Please cite the following paper if you use our work, parts of this code, and pre-processed dataset in your research.
174 |
175 | @ARTICLE{shin2022maximize,
176 | author={Shin, Ukcheol and Lee, Kyunghyun and Lee, Byeong-Uk and Kweon, In So},
177 | journal={IEEE Robotics and Automation Letters},
178 | title={Maximizing Self-Supervision From Thermal Image for Effective Self-Supervised Learning of Depth and Ego-Motion},
179 | year={2022},
180 | volume={7},
181 | number={3},
182 | pages={7771-7778},
183 | doi={10.1109/LRA.2022.3185382}
184 | }
185 |
186 | ## Related projects
187 |
188 | * [SfMLearner-Pytorch](https://github.com/ClementPinard/SfmLearner-Pytorch) (CVPR 2017)
189 | * [SC-SfMLearner-Pytorch](https://github.com/JiawangBian/SC-SfMLearner-Release) (NeurIPS 2019)
190 | * [Thermal-SfMLearner-Pytorch](https://github.com/UkcheolShin/ThermalSfMLearner-MS) (RA-L 2021 & ICRA 2022)
191 |
--------------------------------------------------------------------------------
/common/loss/loss_functions.py:
--------------------------------------------------------------------------------
1 | from __future__ import division
2 | import torch
3 | from torch import nn
4 | import torch.nn.functional as F
5 | from .inverse_warp import inverse_warp2
6 | import math
7 | import numpy as np
8 | device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
9 |
10 | class SSIM(nn.Module):
11 | """Layer to compute the SSIM loss between a pair of images
12 | """
13 | def __init__(self):
14 | super(SSIM, self).__init__()
15 | k=3
16 | self.mu_x_pool = nn.AvgPool2d(k, 1)
17 | self.mu_y_pool = nn.AvgPool2d(k, 1)
18 | self.sig_x_pool = nn.AvgPool2d(k, 1)
19 | self.sig_y_pool = nn.AvgPool2d(k, 1)
20 | self.sig_xy_pool = nn.AvgPool2d(k, 1)
21 |
22 | self.refl = nn.ReflectionPad2d(k//2)
23 |
24 | self.C1 = 0.01 ** 2
25 | self.C2 = 0.03 ** 2
26 |
27 | def forward(self, x, y):
28 | x = self.refl(x)
29 | y = self.refl(y)
30 |
31 | mu_x = self.mu_x_pool(x)
32 | mu_y = self.mu_y_pool(y)
33 |
34 | sigma_x = self.sig_x_pool(x ** 2) - mu_x ** 2
35 | sigma_y = self.sig_y_pool(y ** 2) - mu_y ** 2
36 | sigma_xy = self.sig_xy_pool(x * y) - mu_x * mu_y
37 |
38 | SSIM_n = (2 * mu_x * mu_y + self.C1) * (2 * sigma_xy + self.C2)
39 | SSIM_d = (mu_x ** 2 + mu_y ** 2 + self.C1) * (sigma_x + sigma_y + self.C2)
40 |
41 | return torch.clamp((1 - SSIM_n / SSIM_d) / 2, 0, 1)
42 |
43 | compute_ssim_loss = SSIM().to(device)
44 |
45 | def gradient(D) :
46 | D_dx = torch.abs(D[:, :, :, :-1] - D[:, :, :, 1:])
47 | D_dy = torch.abs(D[:, :, :-1, :] - D[:, :, 1:, :])
48 | return D_dx, D_dy
49 |
50 | def gradient_img(I) :
51 | I_dx = torch.mean(torch.abs(I[:, :, :, :-1] - I[:, :, :, 1:]), 1, keepdim=True)
52 | I_dy = torch.mean(torch.abs(I[:, :, :-1, :] - I[:, :, 1:, :]), 1, keepdim=True)
53 | return I_dx, I_dy
54 |
55 | def compute_smooth_loss(tgt_depth, tgt_img, ref_depths, ref_imgs):
56 | def get_smooth_loss(disp, img):
57 | """Computes the smoothness loss for a disparity image
58 | The color image is used for edge-aware smoothness
59 | """
60 |
61 | # normalize
62 | mean_disp = disp.mean(2, True).mean(3, True)
63 | norm_disp = disp / (mean_disp + 1e-7)
64 | disp = norm_disp
65 |
66 | grad_disp_x = torch.abs(disp[:, :, :, :-1] - disp[:, :, :, 1:])
67 | grad_disp_y = torch.abs(disp[:, :, :-1, :] - disp[:, :, 1:, :])
68 |
69 | grad_img_x = torch.mean(torch.abs(img[:, :, :, :-1] - img[:, :, :, 1:]), 1, keepdim=True)
70 | grad_img_y = torch.mean(torch.abs(img[:, :, :-1, :] - img[:, :, 1:, :]), 1, keepdim=True)
71 |
72 | grad_disp_x *= torch.exp(-grad_img_x)
73 | grad_disp_y *= torch.exp(-grad_img_y)
74 |
75 | return grad_disp_x.mean() + grad_disp_y.mean()
76 |
77 | loss = get_smooth_loss(tgt_depth[0], tgt_img)
78 |
79 | for ref_depth, ref_img in zip(ref_depths, ref_imgs):
80 | loss += get_smooth_loss(ref_depth[0], ref_img)
81 |
82 | return loss
83 |
84 | def compute_photo_and_geometry_loss(tgt_img, ref_imgs, intrinsics, tgt_depth, ref_depths, poses, poses_inv, max_scales, ssim_param, with_ssim, with_mask, with_auto_mask, padding_mode):
85 | """Compute the image reconstruction loss and geometric consistency loss between a pair of images
86 | """
87 |
88 | photo_loss = 0
89 | geometry_loss = 0
90 |
91 | num_scales = min(len(tgt_depth), max_scales)
92 | for ref_img, ref_depth, pose, pose_inv in zip(ref_imgs, ref_depths, poses, poses_inv):
93 | for s in range(num_scales):
94 |
95 | # upsample depth
96 | b, _, h, w = tgt_img.size()
97 | tgt_img_scaled = tgt_img
98 | ref_img_scaled = ref_img
99 | intrinsic_scaled = intrinsics
100 | if s == 0:
101 | tgt_depth_scaled = tgt_depth[s]
102 | ref_depth_scaled = ref_depth[s]
103 | else:
104 | tgt_depth_scaled = F.interpolate(tgt_depth[s], (h, w), mode='nearest')
105 | ref_depth_scaled = F.interpolate(ref_depth[s], (h, w), mode='nearest')
106 |
107 | photo_loss1, geometry_loss1 = compute_pairwise_loss(tgt_img_scaled, ref_img_scaled, tgt_depth_scaled, ref_depth_scaled, pose,
108 | intrinsic_scaled, ssim_param, with_ssim, with_mask, with_auto_mask, padding_mode)
109 | photo_loss2, geometry_loss2 = compute_pairwise_loss(ref_img_scaled, tgt_img_scaled, ref_depth_scaled, tgt_depth_scaled, pose_inv,
110 | intrinsic_scaled, ssim_param, with_ssim, with_mask, with_auto_mask, padding_mode)
111 |
112 | photo_loss += (photo_loss1 + photo_loss2)
113 | geometry_loss += (geometry_loss1 + geometry_loss2)
114 |
115 | return photo_loss, geometry_loss
116 |
117 |
118 | def compute_pairwise_loss(tgt_img, ref_img, tgt_depth, ref_depth, pose, intrinsic, ssim_param, with_ssim, with_mask, with_auto_mask, padding_mode):
119 | """Compute the image reconstruction loss and geometric consistency loss between a pair of images
120 | """
121 | ref_img_warped, valid_mask, projected_depth, computed_depth = inverse_warp2(ref_img, tgt_depth, ref_depth, pose, intrinsic, padding_mode)
122 |
123 | diff_img = (tgt_img - ref_img_warped).abs().clamp(0, 1)
124 | diff_depth = ((computed_depth - projected_depth).abs() / (computed_depth + projected_depth)).clamp(0,1)
125 |
126 | if with_ssim == True:
127 | ssim_map = compute_ssim_loss(tgt_img, ref_img_warped)
128 | diff_img = ((1 - ssim_param) * diff_img + ssim_param * ssim_map)
129 |
130 | if with_auto_mask == True:
131 | diff_img_ = (tgt_img - ref_img).abs().clamp(0,1)
132 | ssim_map_ = compute_ssim_loss(tgt_img, ref_img)
133 | diff_img_ = ((1 - ssim_param) * diff_img_ + ssim_param * ssim_map_) # we follow original automask implementation of Monodepth v2
134 | auto_mask = (diff_img.mean(dim=1, keepdim=True) < diff_img_.mean(dim=1, keepdim=True)).float()
135 | valid_mask *= auto_mask
136 |
137 | if with_mask == True:
138 | weight_mask = (1 - diff_depth)
139 | diff_img = diff_img * weight_mask
140 |
141 | # compute all loss
142 | reconstruction_loss = mean_on_mask(diff_img, valid_mask)
143 | geometry_consistency_loss = mean_on_mask(diff_depth, valid_mask)
144 |
145 | return reconstruction_loss, geometry_consistency_loss
146 |
147 | # compute mean value given a binary mask
148 | def mean_on_mask(diff, valid_mask):
149 |
150 | if valid_mask.shape != diff.shape :
151 | mask = valid_mask.expand_as(diff)
152 | else:
153 | mask = valid_mask
154 |
155 | if mask.sum() > 10000:
156 | mean_value = (diff * mask).sum() / mask.sum()
157 | else:
158 | mean_value = torch.tensor(0).float().to(device)
159 | return mean_value
160 |
161 | @torch.no_grad()
162 | def compute_errors(gt, pred, scene):
163 | abs_diff, abs_rel, sq_rel, a1, a2, a3 = 0, 0, 0, 0, 0, 0
164 | batch_size, h, w = gt.size()
165 |
166 | '''
167 | crop used by Garg ECCV16 to reprocude Eigen NIPS14 results
168 | construct a mask of False values, with the same size as target
169 | and then set to True values inside the crop
170 | '''
171 | crop_mask = gt[0] != gt[0]
172 | crop_mask[:,:] = 1
173 | if scene == 'indoor' :
174 | max_depth = 10
175 | elif scene == 'outdoor':
176 | max_depth = 80
177 |
178 | for current_gt, current_pred in zip(gt, pred):
179 | valid = (current_gt > 0.1) & (current_gt < max_depth)
180 | valid = valid & crop_mask
181 |
182 | valid_gt = current_gt[valid]
183 | valid_pred = current_pred[valid].clamp(1e-3, max_depth)
184 |
185 | valid_pred = valid_pred * torch.median(valid_gt)/torch.median(valid_pred)
186 |
187 | thresh = torch.max((valid_gt / valid_pred), (valid_pred / valid_gt))
188 | a1 += (thresh < 1.25).float().mean()
189 | a2 += (thresh < 1.25 ** 2).float().mean()
190 | a3 += (thresh < 1.25 ** 3).float().mean()
191 |
192 | abs_diff += torch.mean(torch.abs(valid_gt - valid_pred))
193 | abs_rel += torch.mean(torch.abs(valid_gt - valid_pred) / valid_gt)
194 |
195 | sq_rel += torch.mean(((valid_gt - valid_pred)**2) / valid_gt)
196 |
197 | return [metric.item() / batch_size for metric in [abs_diff, abs_rel, sq_rel, a1, a2, a3]]
--------------------------------------------------------------------------------
/common/data_prepare/VIVID_raw_loader.py:
--------------------------------------------------------------------------------
1 | from __future__ import division
2 | import numpy as np
3 | from path import Path
4 | import cv2
5 |
6 | def transform_from_rot_trans(R, t):
7 | """Transforation matrix from rotation matrix and translation vector."""
8 | R = R.reshape(3, 3)
9 | t = t.reshape(3, 1)
10 | return np.vstack((np.hstack([R, t]), [0, 0, 0, 1]))
11 |
12 | class VIVIDRawLoader(object):
13 | def __init__(self,
14 | dataset_dir,
15 | img_height=256,
16 | img_width=320,
17 | min_speed=0.15, # m/sec
18 | get_depth=False,
19 | get_pose=False):
20 | dir_path = Path(__file__).realpath().dirname()
21 |
22 | self.dataset_dir = Path(dataset_dir)
23 | self.img_height = img_height
24 | self.img_width = img_width
25 | self.folder_list = ['RGB', 'Thermal', 'Warped_Depth']
26 | self.date_list = ['indoor_aggresive_global', 'indoor_robust_dark', 'indoor_robust_varying', 'indoor_unstable_local', 'outdoor_robust_night1', 'indoor_aggresive_dark', 'indoor_robust_global', 'indoor_unstable_dark', 'outdoor_robust_day1', 'outdoor_robust_night2', 'indoor_aggresive_local', 'indoor_robust_local', 'indoor_unstable_global', 'outdoor_robust_day2']
27 | self.indoor_train_list = ['indoor_aggresive_global', 'indoor_unstable_local', 'indoor_robust_global', 'indoor_robust_local', 'indoor_unstable_global']
28 | self.indoor_val_list = ['indoor_robust_dark', 'indoor_aggresive_local']
29 | self.indoor_test_list = ['indoor_robust_dark', 'indoor_robust_varying', 'indoor_aggresive_dark', 'indoor_unstable_dark', 'indoor_aggresive_local']
30 | self.outdoor_train_list = ['outdoor_robust_day1', 'outdoor_robust_day2']
31 | self.outdoor_val_list = ['outdoor_robust_night1']
32 | self.outdoor_test_list = ['outdoor_robust_night1', 'outdoor_robust_night2']
33 | self.min_speed = min_speed
34 | self.get_depth = get_depth
35 | self.get_pose = get_pose
36 | self.collect_train_folders()
37 |
38 | # collect dataset sequence path.
39 | def collect_train_folders(self):
40 | self.scenes = []
41 | for date in self.date_list:
42 | self.scenes.append((self.dataset_dir/date))
43 |
44 | # collect subset from target
45 | def collect_scenes(self, drive):
46 | scene_data = {'dir': drive, 'speed': [], 'frame_id': [], 'pose_T':[], 'pose_RGB':[], 'rel_path': drive.name}
47 | ther2rgb = self.read_raw_calib_file(drive.parent/'calibration'/'calib_ther_to_rgb.yaml')
48 | # event2rgb = self.read_raw_calib_file(drive.parent/'calibration'/'calib_event_to_rgb.yaml')
49 | # lidar2rgb = self.read_raw_calib_file(drive.parent/'calibration'/'calib_lidar_to_rgb.yaml')
50 | # rgb2imu = self.read_raw_calib_file(drive.parent/'calibration'/'calib_rgb_to_imu.yaml')
51 | # vicon2rgb = self.read_raw_calib_file(drive.parent/'calibration'/'calib_vicon_to_rgb.yaml')
52 | # ther2rgb_mat = transform_from_rot_trans(ther2rgb['R'], ther2rgb['T'])
53 |
54 | # read pose in target coord
55 | TgtPoseVec_T = np.genfromtxt(drive/'poses_thermal.txt') # len x 12 (3x4 matrix)
56 | TgtPoseMat_T = TgtPoseVec_T.reshape(-1,3,4)
57 |
58 | TgtPoseVec_RGB = np.genfromtxt(drive/'poses_RGB.txt') # len x 12 (3x4 matrix)
59 | TgtPoseMat_RGB = TgtPoseVec_RGB.reshape(-1,3,4)
60 |
61 | # read avg speed in target coor
62 | TgtAvgVelo_T = np.genfromtxt(drive/'avg_velocity_thermal.txt') # len x 1
63 |
64 | for n in range(len(TgtAvgVelo_T)):
65 | scene_data['pose_T'].append(TgtPoseMat_T[n])
66 | scene_data['pose_RGB'].append(TgtPoseMat_RGB[n])
67 | scene_data['frame_id'].append('{:06d}'.format(n+1)) # files are start from 1, but python indexing start from 0
68 | scene_data['speed'].append(TgtAvgVelo_T[n])
69 |
70 | sample_T = self.load_image(scene_data, 1, 'T')
71 | if sample_T is None:
72 | return []
73 | sample_RGB = self.load_image(scene_data, 1, 'RGB')
74 | if sample_RGB is None:
75 | return []
76 |
77 | scene_data['P_rect_T'] = self.get_P_rect(scene_data, sample_T[1], sample_T[2], 'T')
78 | scene_data['P_rect_RGB'] = self.get_P_rect(scene_data, sample_RGB[1], sample_RGB[2], 'RGB')
79 | scene_data['Tr_T2RGB'] = self.get_T_T2RGB(scene_data)
80 | scene_data['intrinsics_T'] = scene_data['P_rect_T'][:,:3]
81 | scene_data['intrinsics_RGB'] = scene_data['P_rect_RGB'][:,:3]
82 | scene_data['FolderList'] = self.folder_list
83 |
84 | return scene_data
85 |
86 | # sampling according to its moving velocity
87 | def get_scene_imgs(self, scene_data):
88 | def construct_sample(scene_data, i, frame_id):
89 | sample = {"id":frame_id}
90 | Img_RGB, Img_Ther = self.load_All_image(scene_data, i)
91 | sample['Img_RGB'] = Img_RGB
92 | sample['Img_Ther'] = Img_Ther
93 |
94 | if self.get_depth:
95 | sample['depth_T'] = self.load_Depth(scene_data, i, 'T')
96 | sample['depth_RGB'] = self.load_Depth(scene_data, i, 'RGB')
97 | if self.get_pose:
98 | sample['pose_T'] = scene_data['pose_T'][i]
99 | sample['pose_RGB'] = scene_data['pose_RGB'][i]
100 |
101 | return sample
102 |
103 | cum_speed = np.zeros(1)
104 | for i, speed in enumerate(scene_data['speed']):
105 | cum_speed += speed
106 | speed_mag = np.linalg.norm(cum_speed)
107 | if speed_mag > self.min_speed:
108 | frame_id = scene_data['frame_id'][i]
109 | yield construct_sample(scene_data, i, frame_id)
110 | cum_speed *= 0
111 |
112 | def get_P_rect(self, scene_data, zoom_x, zoom_y, Dtype):
113 | calib_file = scene_data['dir'].parent/'calibration'/'calib_ther_to_rgb.yaml'
114 |
115 | filedata = self.read_raw_calib_file(calib_file)
116 | if Dtype == 'T':
117 | K_ = np.reshape(filedata['K_Thermal'], (3, 3))
118 | elif Dtype == 'RGB':
119 | K_ = np.reshape(filedata['K_RGB'], (3, 3))
120 | P_rect = K_@np.array([[1,0,0,0],[0,1,0,0],[0,0,1,0]])
121 | P_rect[0] *= zoom_x
122 | P_rect[1] *= zoom_y
123 | return P_rect
124 |
125 | def get_T_T2RGB(self, scene_data):
126 | calib_file = scene_data['dir'].parent/'calibration'/'calib_ther_to_rgb.yaml'
127 | filedata = self.read_raw_calib_file(calib_file)
128 | R = filedata['R']
129 | T = filedata['T']
130 | T_T2RGB = transform_from_rot_trans(R,T)
131 | return T_T2RGB
132 |
133 | def load_image(self, scene_data, tgt_idx, Dtype):
134 | if Dtype == 'T':
135 | img_file = scene_data['dir']/'Thermal'/'data'/scene_data['frame_id'][tgt_idx]+'.png'
136 | elif Dtype == 'RGB':
137 | img_file = scene_data['dir']/'RGB'/'data'/scene_data['frame_id'][tgt_idx]+'.png'
138 |
139 | if not img_file.isfile():
140 | return None
141 | img = cv2.imread(img_file, cv2.IMREAD_UNCHANGED)
142 | zoom_y = self.img_height/img.shape[0]
143 | zoom_x = self.img_width/img.shape[1]
144 | img = cv2.resize(img, (self.img_width, self.img_height)) # shape is width,height order
145 | return img, zoom_x, zoom_y
146 |
147 | def load_All_image(self, scene_data, tgt_idx):
148 | img_file0 = scene_data['dir']/'RGB'/'data'/scene_data['frame_id'][tgt_idx]+'.png' # uint8, 3ch
149 | img_file1 = scene_data['dir']/'Thermal'/'data'/scene_data['frame_id'][tgt_idx]+'.png' # uint16, 1ch
150 | if not img_file1.isfile():
151 | return None
152 |
153 | img0 = cv2.imread(img_file0, cv2.IMREAD_UNCHANGED) # RGB
154 | img0 = cv2.resize(img0, (self.img_width, self.img_height)) # shape is width,height order
155 |
156 | img1 = cv2.imread(img_file1, cv2.IMREAD_UNCHANGED)
157 | img1 = cv2.resize(img1, (self.img_width, self.img_height)) # shape is width,height order
158 |
159 | return img0, img1
160 |
161 | def load_Depth(self, scene_data, tgt_idx, Dtype):
162 | if Dtype == 'T':
163 | depth_file = scene_data['dir']/'Warped_Depth'/'data_THERMAL'/scene_data['frame_id'][tgt_idx]+'.npy'
164 | if Dtype == 'RGB':
165 | depth_file = scene_data['dir']/'Warped_Depth'/'data_RGB'/scene_data['frame_id'][tgt_idx]+'.npy'
166 | if not depth_file.isfile():
167 | return None
168 | depth = np.load(depth_file)
169 |
170 | return depth
171 |
172 | def read_raw_calib_file(self, filepath):
173 | # From https://github.com/utiasSTARS/pykitti/blob/master/pykitti/utils.py
174 | """Read in a calibration file and parse into a dictionary."""
175 | data = {}
176 |
177 | with open(filepath, 'r') as f:
178 | for line in f.readlines():
179 | key, value = line.split(':', 1)
180 | # The only non-float values in these files are dates, which
181 | # we don't care about anyway
182 | try:
183 | data[key] = np.array([float(x) for x in value.split()])
184 | except ValueError:
185 | pass
186 | return data
187 |
--------------------------------------------------------------------------------
/common/loss/inverse_warp.py:
--------------------------------------------------------------------------------
1 | from __future__ import division
2 | import torch
3 | import torch.nn.functional as F
4 |
5 | pixel_coords = None
6 |
7 | def set_id_grid(depth):
8 | global pixel_coords
9 | b, h, w = depth.size()
10 | i_range = torch.arange(0, h).view(1, h, 1).expand(
11 | 1, h, w).type_as(depth) # [1, H, W]
12 | j_range = torch.arange(0, w).view(1, 1, w).expand(
13 | 1, h, w).type_as(depth) # [1, H, W]
14 | ones = torch.ones(1, h, w).type_as(depth)
15 |
16 | pixel_coords = torch.stack((j_range, i_range, ones), dim=1) # [1, 3, H, W]
17 |
18 |
19 | def check_sizes(input, input_name, expected):
20 | condition = [input.ndimension() == len(expected)]
21 | for i, size in enumerate(expected):
22 | if size.isdigit():
23 | condition.append(input.size(i) == int(size))
24 | assert(all(condition)), "wrong size for {}, expected {}, got {}".format(
25 | input_name, 'x'.join(expected), list(input.size()))
26 |
27 |
28 | def pixel2cam(depth, intrinsics_inv):
29 | global pixel_coords
30 | """Transform coordinates in the pixel frame to the camera frame.
31 | Args:
32 | depth: depth maps -- [B, H, W]
33 | intrinsics_inv: intrinsics_inv matrix for each element of batch -- [B, 3, 3]
34 | Returns:
35 | array of (u,v,1) cam coordinates -- [B, 3, H, W]
36 | """
37 | b, h, w = depth.size()
38 | if (pixel_coords is None) or pixel_coords.size(2) < h:
39 | set_id_grid(depth)
40 | current_pixel_coords = pixel_coords[:, :, :h, :w].expand(
41 | b, 3, h, w).reshape(b, 3, -1) # [B, 3, H*W]
42 | cam_coords = (intrinsics_inv @ current_pixel_coords).reshape(b, 3, h, w)
43 | return cam_coords * depth.unsqueeze(1)
44 |
45 |
46 | def cam2pixel(cam_coords, proj_c2p_rot, proj_c2p_tr, padding_mode):
47 | """Transform coordinates in the camera frame to the pixel frame.
48 | Args:
49 | cam_coords: pixel coordinates defined in the first camera coordinates system -- [B, 4, H, W]
50 | proj_c2p_rot: rotation matrix of cameras -- [B, 3, 4]
51 | proj_c2p_tr: translation vectors of cameras -- [B, 3, 1]
52 | Returns:
53 | array of [-1,1] coordinates -- [B, 2, H, W]
54 | """
55 | b, _, h, w = cam_coords.size()
56 | cam_coords_flat = cam_coords.reshape(b, 3, -1) # [B, 3, H*W]
57 | if proj_c2p_rot is not None:
58 | pcoords = proj_c2p_rot @ cam_coords_flat
59 | else:
60 | pcoords = cam_coords_flat
61 |
62 | if proj_c2p_tr is not None:
63 | pcoords = pcoords + proj_c2p_tr # [B, 3, H*W]
64 | X = pcoords[:, 0]
65 | Y = pcoords[:, 1]
66 | Z = pcoords[:, 2].clamp(min=1e-3)
67 |
68 | # Normalized, -1 if on extreme left, 1 if on extreme right (x = w-1) [B, H*W]
69 | X_norm = 2*(X / Z)/(w-1) - 1
70 | Y_norm = 2*(Y / Z)/(h-1) - 1 # Idem [B, H*W]
71 | if padding_mode == 'zeros':
72 | X_mask = ((X_norm > 1)+(X_norm < -1)).detach()
73 | # make sure that no point in warped image is a combinaison of im and gray
74 | X_norm[X_mask] = 2
75 | Y_mask = ((Y_norm > 1)+(Y_norm < -1)).detach()
76 | Y_norm[Y_mask] = 2
77 |
78 | pixel_coords = torch.stack([X_norm, Y_norm], dim=2) # [B, H*W, 2]
79 | return pixel_coords.reshape(b, h, w, 2), Z.reshape(b, 1, h, w)
80 |
81 |
82 | def euler2mat(angle):
83 | """Convert euler angles to rotation matrix.
84 | Reference: https://github.com/pulkitag/pycaffe-utils/blob/master/rot_utils.py#L174
85 | Args:
86 | angle: rotation angle along 3 axis (in radians) -- size = [B, 3]
87 | Returns:
88 | Rotation matrix corresponding to the euler angles -- size = [B, 3, 3]
89 | """
90 | B = angle.size(0)
91 | x, y, z = angle[:, 0], angle[:, 1], angle[:, 2]
92 |
93 | cosz = torch.cos(z)
94 | sinz = torch.sin(z)
95 |
96 | zeros = z.detach()*0
97 | ones = zeros.detach()+1
98 | zmat = torch.stack([cosz, -sinz, zeros,
99 | sinz, cosz, zeros,
100 | zeros, zeros, ones], dim=1).reshape(B, 3, 3)
101 |
102 | cosy = torch.cos(y)
103 | siny = torch.sin(y)
104 |
105 | ymat = torch.stack([cosy, zeros, siny,
106 | zeros, ones, zeros,
107 | -siny, zeros, cosy], dim=1).reshape(B, 3, 3)
108 |
109 | cosx = torch.cos(x)
110 | sinx = torch.sin(x)
111 |
112 | xmat = torch.stack([ones, zeros, zeros,
113 | zeros, cosx, -sinx,
114 | zeros, sinx, cosx], dim=1).reshape(B, 3, 3)
115 |
116 | rotMat = xmat @ ymat @ zmat
117 | return rotMat
118 |
119 |
120 | def quat2mat(quat):
121 | """Convert quaternion coefficients to rotation matrix.
122 | Args:
123 | quat: first three coeff of quaternion of rotation. fourht is then computed to have a norm of 1 -- size = [B, 3]
124 | Returns:
125 | Rotation matrix corresponding to the quaternion -- size = [B, 3, 3]
126 | """
127 | norm_quat = torch.cat([quat[:, :1].detach()*0 + 1, quat], dim=1)
128 | norm_quat = norm_quat/norm_quat.norm(p=2, dim=1, keepdim=True)
129 | w, x, y, z = norm_quat[:, 0], norm_quat[:,
130 | 1], norm_quat[:, 2], norm_quat[:, 3]
131 |
132 | B = quat.size(0)
133 |
134 | w2, x2, y2, z2 = w.pow(2), x.pow(2), y.pow(2), z.pow(2)
135 | wx, wy, wz = w*x, w*y, w*z
136 | xy, xz, yz = x*y, x*z, y*z
137 |
138 | rotMat = torch.stack([w2 + x2 - y2 - z2, 2*xy - 2*wz, 2*wy + 2*xz,
139 | 2*wz + 2*xy, w2 - x2 + y2 - z2, 2*yz - 2*wx,
140 | 2*xz - 2*wy, 2*wx + 2*yz, w2 - x2 - y2 + z2], dim=1).reshape(B, 3, 3)
141 | return rotMat
142 |
143 |
144 | def pose_vec2mat(vec, rotation_mode='euler'):
145 | """
146 | Convert 6DoF parameters to transformation matrix.
147 | Args:s
148 | vec: 6DoF parameters in the order of tx, ty, tz, rx, ry, rz -- [B, 6]
149 | Returns:
150 | A transformation matrix -- [B, 3, 4]
151 | """
152 | translation = vec[:, :3].unsqueeze(-1) # [B, 3, 1]
153 | rot = vec[:, 3:]
154 | if rotation_mode == 'euler':
155 | rot_mat = euler2mat(rot) # [B, 3, 3]
156 | elif rotation_mode == 'quat':
157 | rot_mat = quat2mat(rot) # [B, 3, 3]
158 |
159 | transform_mat = torch.cat([rot_mat, translation], dim=2) # [B, 3, 4]
160 | return transform_mat
161 |
162 |
163 | # inverse_warp from sfm-learner paper
164 | def inverse_warp(img, depth, pose, intrinsics, rotation_mode='euler', padding_mode='zeros'):
165 | """
166 | Inverse warp a source image to the target image plane.
167 | Args:
168 | img: the source image (where to sample pixels) -- [B, 3, H, W]
169 | depth: depth map of the target image -- [B, H, W]
170 | pose: 6DoF pose parameters from target to source -- [B, 6]
171 | intrinsics: camera intrinsic matrix -- [B, 3, 3]
172 | Returns:
173 | projected_img: Source image warped to the target image plane
174 | valid_points: Boolean array indicating point validity
175 | """
176 | check_sizes(img, 'img', 'B1HW') # Thermal Image
177 | check_sizes(depth, 'depth', 'BHW')
178 | check_sizes(pose, 'pose', 'B6')
179 | check_sizes(intrinsics, 'intrinsics', 'B33')
180 |
181 | batch_size, _, img_height, img_width = img.size()
182 |
183 | cam_coords = pixel2cam(depth, intrinsics.inverse()) # [B,3,H,W]
184 |
185 | pose_mat = pose_vec2mat(pose, rotation_mode) # [B,3,4]
186 |
187 | # Get projection matrix for tgt camera frame to source pixel frame
188 | proj_cam_to_src_pixel = intrinsics @ pose_mat # [B, 3, 4]
189 |
190 | rot, tr = proj_cam_to_src_pixel[:, :, :3], proj_cam_to_src_pixel[:, :, -1:]
191 | src_pixel_coords = cam2pixel(
192 | cam_coords, rot, tr, padding_mode)[0] # [B,H,W,2]
193 | projected_img = F.grid_sample(
194 | img, src_pixel_coords, padding_mode=padding_mode)
195 |
196 | valid_points = src_pixel_coords.abs().max(dim=-1)[0] <= 1
197 |
198 | return projected_img, valid_points
199 |
200 | # inverse_warp from SC-sfm-learner paper
201 | def inverse_warp2(img, depth, ref_depth, pose, intrinsics, padding_mode='zeros'):
202 | """
203 | Inverse warp a source image to the target image plane.
204 | Args:
205 | img: the source image (where to sample pixels) -- [B, 3, H, W]
206 | depth: depth map of the target image -- [B, 1, H, W]
207 | ref_depth: the source depth map (where to sample depth) -- [B, 1, H, W]
208 | pose: 6DoF pose parameters from target to source -- [B, 6]
209 | intrinsics: camera intrinsic matrix -- [B, 3, 3]
210 | Returns:
211 | projected_img: Source image warped to the target image plane
212 | valid_mask: Float array indicating point validity
213 | projected_depth: sampled depth from source image
214 | computed_depth: computed depth of source image using the target depth
215 | """
216 | check_sizes(img, 'img', 'B1HW') # Thermal Image
217 | check_sizes(depth, 'depth', 'B1HW')
218 | check_sizes(ref_depth, 'ref_depth', 'B1HW')
219 | check_sizes(pose, 'pose', 'B6')
220 | check_sizes(intrinsics, 'intrinsics', 'B33')
221 |
222 | batch_size, _, img_height, img_width = img.size()
223 |
224 | cam_coords = pixel2cam(depth.squeeze(1), intrinsics.inverse()) # [B,3,H,W]
225 |
226 | pose_mat = pose_vec2mat(pose) # [B,3,4]
227 |
228 | # Get projection matrix for tgt camera frame to source pixel frame
229 | proj_cam_to_src_pixel = intrinsics @ pose_mat # [B, 3, 4]
230 |
231 | rot, tr = proj_cam_to_src_pixel[:, :, :3], proj_cam_to_src_pixel[:, :, -1:]
232 | src_pixel_coords, computed_depth = cam2pixel(cam_coords, rot, tr, padding_mode) # [B,H,W,2]
233 | projected_img = F.grid_sample(img, src_pixel_coords, padding_mode=padding_mode, align_corners=False)
234 |
235 | valid_points = src_pixel_coords.abs().max(dim=-1)[0] <= 1
236 | valid_mask = valid_points.unsqueeze(1).float()
237 |
238 | projected_depth = F.grid_sample(ref_depth, src_pixel_coords, padding_mode=padding_mode, align_corners=False)
239 |
240 | return projected_img, valid_mask, projected_depth, computed_depth
--------------------------------------------------------------------------------
/train.py:
--------------------------------------------------------------------------------
1 | import numpy as np
2 | import torch
3 | import torch.backends.cudnn as cudnn
4 | import torch.optim
5 | import torch.utils.data
6 |
7 | import argparse
8 | import time
9 | import datetime
10 | from path import Path
11 |
12 | from dataloader.VIVID_sequence_folders import SequenceFolder
13 |
14 | import sys
15 | sys.path.append('./common/')
16 |
17 | import models
18 | import utils.custom_transforms as custom_transforms
19 | from utils.utils import tensor2array, save_checkpoint, tensor2array_thermal
20 |
21 | from loss.inverse_warp import pose_vec2mat
22 | from loss.loss_functions import compute_smooth_loss, compute_photo_and_geometry_loss, compute_errors
23 |
24 | # logging
25 | import csv
26 | from utils.logger import TermLogger, AverageMeter
27 | from tensorboardX import SummaryWriter
28 |
29 | parser = argparse.ArgumentParser(description='Structure from Motion Learner training on KITTI and CityScapes Dataset',
30 | formatter_class=argparse.ArgumentDefaultsHelpFormatter)
31 |
32 | parser.add_argument('data', metavar='DIR', help='path to dataset')
33 | parser.add_argument('-j', '--workers', default=4, type=int, metavar='N', help='number of data loading workers')
34 | parser.add_argument('--epochs', default=200, type=int, metavar='N', help='number of total epochs to run')
35 | parser.add_argument('--epoch-size', default=0, type=int, metavar='N', help='manual epoch size (will match dataset size if not set)')
36 |
37 | # optimizer param
38 | parser.add_argument('-b', '--batch-size', default=4, type=int, metavar='N', help='mini-batch size')
39 | parser.add_argument('--lr', '--learning-rate', default=1e-4, type=float, metavar='LR', help='initial learning rate')
40 | parser.add_argument('--momentum', default=0.9, type=float, metavar='M', help='momentum for sgd, alpha parameter for adam')
41 | parser.add_argument('--beta', default=0.999, type=float, metavar='M', help='beta parameters for adam')
42 | parser.add_argument('--weight-decay', '--wd', default=0, type=float, metavar='W', help='weight decay')
43 | parser.add_argument('--seed', default=0, type=int, help='seed for random functions, and network initialization')
44 | parser.add_argument('--padding-mode', type=str, choices=['zeros', 'border'], default='zeros',
45 | help='padding mode for image warping : this is important for photometric differenciation when going outside target image.'
46 | ' zeros will null gradients outside target image.'
47 | ' border will only null gradients of the coordinate outside (x or y)')
48 | # logger
49 | parser.add_argument('--name', dest='name', type=str, required=True, help='name of the experiment, checkpoints are stored in checpoints/name')
50 | parser.add_argument('--print-freq', default=10, type=int, metavar='N', help='print frequency')
51 | parser.add_argument('--log-output', action='store_true', help='will log dispnet outputs at validation step')
52 |
53 | # data loader
54 | parser.add_argument('--scene_type', type=str, choices=['indoor', 'outdoor'], default='indoor', required=True)
55 | parser.add_argument('--sequence-length', type=int, help='Length of sequence', metavar='N', default=3)
56 | parser.add_argument('--interval', type=int, help='Interval of sequence', metavar='N', default=5)
57 |
58 | parser.add_argument('--with-pretrain', type=int, default=1, help='with or without imagenet pretrain for resnet')
59 | parser.add_argument('--pretrained-disp', dest='pretrained_disp', default=None, metavar='PATH', help='path to pre-trained dispnet model')
60 | parser.add_argument('--pretrained-pose', dest='pretrained_pose', default=None, metavar='PATH', help='path to pre-trained Pose net model')
61 |
62 | # loss param
63 | parser.add_argument('--resnet-layers', type=int, default=18, choices=[18, 50], help='number of ResNet layers for depth estimation.')
64 | parser.add_argument('--num-scales', '--number-of-scales', type=int, help='the number of scales', metavar='W', default=1)
65 | parser.add_argument('-p', '--photo-loss-weight', type=float, help='weight for photometric loss', metavar='W', default=1)
66 | parser.add_argument('-s', '--smooth-loss-weight', type=float, help='weight for disparity smoothness loss', metavar='W', default=0.01)
67 | parser.add_argument('-c', '--geometry-consistency-weight', type=float, help='weight for depth consistency loss', metavar='W', default=0.5)
68 | parser.add_argument('--ssim_weight', type=float, default=0.85, help='weight for ssim scaling factor')
69 |
70 | parser.add_argument('--with-ssim', type=int, default=1, help='with ssim or not')
71 | parser.add_argument('--with-mask', type=int, default=1, help='with the image mask for moving objects and occlusions or not')
72 | parser.add_argument('--with-auto-mask', type=int, default=1, help='with the mask for stationary points')
73 |
74 | # thermal image mapping param
75 | parser.add_argument('--rearrange-bin', type=int, default=30, help='Number of bin for thermal image rearrangement')
76 | parser.add_argument('--clahe-clip', type=float, default=2.0, help='clip limitation for CLAHE')
77 |
78 | best_depth_error = -1
79 | best_pose_error = -1
80 | n_iter = 0
81 | device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
82 | torch.autograd.set_detect_anomaly(True)
83 |
84 | def main():
85 | global best_depth_error, best_pose_error, n_iter, device
86 | args = parser.parse_args()
87 |
88 | timestamp = datetime.datetime.now().strftime("%m-%d-%H:%M")
89 | save_path = Path(args.name)
90 | args.save_path = 'checkpoints'/save_path/timestamp
91 | print('=> will save everything to {}'.format(args.save_path))
92 | args.save_path.makedirs_p()
93 |
94 | torch.manual_seed(args.seed)
95 | np.random.seed(args.seed)
96 | cudnn.deterministic = True
97 | cudnn.benchmark = True
98 |
99 | training_writer = SummaryWriter(args.save_path)
100 | output_writers = []
101 | if args.log_output:
102 | for i in range(3):
103 | output_writers.append(SummaryWriter(args.save_path/'valid'/str(i)))
104 |
105 | # set dataloader
106 | if args.scene_type == 'indoor' : # indoor
107 | args.vis_depth_max = 4
108 | elif args.scene_type == 'outdoor' : # outdoor
109 | args.vis_depth_max = 10
110 |
111 | ArrToTen = custom_transforms.ArrayToTensor(max_value=2**14)
112 | ArrToTen4Loss = custom_transforms.ArrayToTensorWithLocalWindow()
113 | TenThrRearran = custom_transforms.TensorThermalRearrange(bin_num=args.rearrange_bin, CLAHE_clip=args.clahe_clip)
114 | normalize = custom_transforms.Normalize(mean=[0.45, 0.45, 0.45], std=[0.225, 0.225, 0.225])
115 |
116 | transform4input = custom_transforms.Compose([ArrToTen, normalize])
117 | transform4loss = custom_transforms.Compose([ArrToTen4Loss, TenThrRearran, normalize])
118 |
119 | train_transform_share = custom_transforms.Compose([
120 | custom_transforms.RandomHorizontalFlip(),
121 | custom_transforms.RandomScaleCrop(),
122 | ])
123 |
124 | print("=> fetching scenes in '{}'".format(args.data))
125 | train_set = SequenceFolder(
126 | args.data,
127 | tf_share = train_transform_share,
128 | tf_input = transform4input,
129 | tf_loss = transform4loss,
130 | seed = args.seed,
131 | scene_type = args.scene_type,
132 | sequence_length = args.sequence_length,
133 | interval = args.interval,
134 | train = True,
135 | )
136 |
137 | from dataloader.VIVID_validation_folders import ValidationSet, ValidationSetPose
138 | val_set = ValidationSet(
139 | args.data,
140 | tf_input = transform4input,
141 | tf_loss = transform4loss,
142 | sequence_length = args.sequence_length,
143 | interval = args.interval,
144 | scene_type = args.scene_type,
145 | )
146 | val_pose_set = ValidationSetPose(
147 | args.data,
148 | tf_input = transform4input ,
149 | scene_type = args.scene_type,
150 | sequence_length = args.sequence_length,
151 | )
152 |
153 | print('{} samples found in {} train scenes'.format(len(train_set), len(train_set.folders)))
154 | print('{} samples found in {} valid scenes'.format(len(val_set), len(val_set.folders)))
155 |
156 | train_loader = torch.utils.data.DataLoader(
157 | train_set, batch_size=args.batch_size, shuffle=True,
158 | num_workers=args.workers, pin_memory=True)
159 |
160 | val_loader = torch.utils.data.DataLoader(
161 | val_set, batch_size=args.batch_size, shuffle=False,
162 | num_workers=args.workers, pin_memory=True)
163 |
164 | val_pose_loader = torch.utils.data.DataLoader(
165 | val_pose_set, batch_size=args.batch_size, shuffle=False,
166 | num_workers=args.workers, pin_memory=True)
167 |
168 | if args.epoch_size == 0:
169 | args.epoch_size = len(train_loader)
170 |
171 | # create model
172 | print("=> creating model")
173 | disp_pose_net = models.DispPoseResNet(args.resnet_layers, args.with_pretrain, num_channel=1).to(device)
174 | disp_net = disp_pose_net.DispResNet
175 | pose_net = disp_pose_net.PoseResNet
176 |
177 | # load parameters
178 | if args.pretrained_disp:
179 | print("=> using pre-trained weights for DispResNet")
180 | weights = torch.load(args.pretrained_disp)
181 | disp_net.load_state_dict(weights['state_dict'], strict=False)
182 |
183 | if args.pretrained_pose:
184 | print("=> using pre-trained weights for PoseResNet")
185 | weights = torch.load(args.pretrained_pose)
186 | pose_net.load_state_dict(weights['state_dict'], strict=False)
187 |
188 | disp_net = torch.nn.DataParallel(disp_net)
189 | pose_net = torch.nn.DataParallel(pose_net)
190 |
191 | # set optimizer
192 | print('=> setting adam solver')
193 | optim_params = [
194 | {'params': disp_pose_net.parameters(), 'lr': args.lr},
195 | ]
196 |
197 | optimizer = torch.optim.Adam(optim_params,
198 | betas=(args.momentum, args.beta),
199 | weight_decay=args.weight_decay)
200 | # set logger
201 | logger = TermLogger(n_epochs=args.epochs, train_size=min(len(train_loader), args.epoch_size), valid_size=len(val_pose_loader))
202 | logger.epoch_bar.start()
203 |
204 | for epoch in range(args.epochs):
205 | logger.epoch_bar.update(epoch)
206 |
207 | # train for one epoch
208 | logger.reset_train_bar()
209 | train_loss = train(args, train_loader, disp_net, pose_net, optimizer, args.epoch_size, logger, training_writer)
210 | logger.train_writer.write(' * Avg Loss : {:.3f}'.format(train_loss))
211 |
212 | # evaluate on validation set
213 | logger.reset_valid_bar()
214 | pose_errors, pose_error_names = validate_pose_with_gt(args, val_pose_loader, pose_net, epoch, logger, output_writers)
215 | depth_errors, detph_error_names = validate_depth_with_gt(args, val_loader, disp_net, epoch, logger, output_writers)
216 | errors = depth_errors + pose_errors
217 | error_names = detph_error_names + pose_error_names
218 |
219 | error_string = ', '.join('{} : {:.3f}'.format(name, error) for name, error in zip(error_names, errors))
220 | logger.valid_writer.write(' * Avg {}'.format(error_string))
221 |
222 | for error, name in zip(errors, error_names):
223 | training_writer.add_scalar(name, error, epoch)
224 |
225 | # Up to you to chose the most relevant error to measure your model's performance, careful some measures are to maximize (such as a1,a2,a3)
226 | decisive_depth_error = errors[1] # ['abs_diff', 'abs_rel', 'sq_rel', 'a1', 'a2', 'a3', 'ATE', 'RE']
227 | decisive_pose_error = errors[6] # ATE
228 |
229 | if best_depth_error < 0:
230 | best_depth_error = decisive_depth_error
231 |
232 | if best_pose_error < 0:
233 | best_pose_error = decisive_pose_error
234 |
235 | # remember lowest error and save checkpoint
236 | is_depth_best = decisive_depth_error < best_depth_error
237 | best_depth_error = min(best_depth_error, decisive_depth_error)
238 |
239 | is_pose_best = decisive_pose_error < best_pose_error
240 | best_pose_error = min(best_pose_error, decisive_pose_error)
241 |
242 | save_checkpoint(
243 | args.save_path, {
244 | 'epoch': epoch + 1,
245 | 'state_dict': disp_net.module.state_dict()
246 | }, {
247 | 'epoch': epoch + 1,
248 | 'state_dict': pose_net.module.state_dict()
249 | },
250 | is_depth_best, is_pose_best)
251 |
252 | logger.epoch_bar.finish()
253 |
254 | def train(args, train_loader, disp_net, pose_net, optimizer, epoch_size, logger, train_writer):
255 | global n_iter, device
256 | batch_time = AverageMeter()
257 | data_time = AverageMeter()
258 | losses = AverageMeter(precision=4)
259 | w1, w2, w3 = args.photo_loss_weight, args.smooth_loss_weight, args.geometry_consistency_weight
260 |
261 | # switch to train mode
262 | disp_net.train()
263 | pose_net.train()
264 |
265 | end = time.time()
266 | logger.train_bar.update(0)
267 |
268 | for i, (tgt_img, ref_imgs, tgt_img_loss, ref_imgs_loss, intrinsics) in enumerate(train_loader):
269 | log_losses = i > 0 and n_iter % args.print_freq == 0
270 |
271 | # measure data loading time
272 | data_time.update(time.time() - end)
273 |
274 | tgt_img = tgt_img.to(device)
275 | ref_imgs = [img.to(device) for img in ref_imgs]
276 |
277 | tgt_img_loss = tgt_img_loss.to(device)
278 | ref_imgs_loss = [img.to(device) for img in ref_imgs_loss]
279 |
280 | intrinsics = intrinsics.to(device)
281 |
282 | # compute output
283 | tgt_depth, ref_depths = compute_depth(disp_net, tgt_img, ref_imgs)
284 | poses, poses_inv = compute_pose_with_inv(pose_net, tgt_img, ref_imgs)
285 |
286 | loss_1, loss_3 = compute_photo_and_geometry_loss(tgt_img_loss, ref_imgs_loss, intrinsics, tgt_depth, ref_depths,
287 | poses, poses_inv, args.num_scales, args.ssim_weight, args.with_ssim,
288 | args.with_mask, args.with_auto_mask, args.padding_mode)
289 |
290 | # smoothness loss, not necessary for thermal image
291 | loss_2 = compute_smooth_loss(tgt_depth, tgt_img_loss, ref_depths, ref_imgs_loss)
292 |
293 | loss = w1*loss_1 + w2*loss_2 + w3*loss_3
294 |
295 | if log_losses:
296 | train_writer.add_scalar('image_recon_loss_thermal' , loss_1.item(), n_iter)
297 | train_writer.add_scalar('disparity_smoothness_loss' , loss_2.item(), n_iter)
298 | train_writer.add_scalar('geometry_consistency_loss_thermal', loss_3.item(), n_iter)
299 | train_writer.add_scalar('total_loss', loss.item(), n_iter)
300 |
301 | # record loss
302 | losses.update(loss.item(), args.batch_size)
303 |
304 | # compute gradient and do Adam step
305 | optimizer.zero_grad()
306 | loss.backward()
307 | optimizer.step()
308 |
309 | # measure elapsed time
310 | batch_time.update(time.time() - end)
311 | end = time.time()
312 |
313 | logger.train_bar.update(i+1)
314 |
315 | if i % args.print_freq == 0:
316 | logger.train_writer.write('Train: Time {} Data {} Loss {}'.format(batch_time, data_time, losses))
317 | if i >= epoch_size - 1:
318 | break
319 |
320 | n_iter += 1
321 |
322 | return losses.avg[0]
323 |
324 | @torch.no_grad()
325 | def validate_depth_with_gt(args, val_loader, disp_net, epoch, logger, output_writers=[]):
326 | global device
327 | batch_time = AverageMeter()
328 | error_names = ['abs_diff', 'abs_rel', 'sq_rel', 'a1', 'a2', 'a3']
329 | errors = AverageMeter(i=len(error_names))
330 | log_outputs = len(output_writers) > 0
331 |
332 | # switch to evaluate mode
333 | disp_net.eval()
334 |
335 | end = time.time()
336 | logger.valid_bar.update(0)
337 |
338 | for i, (tgt_img, tgt_img_loss, depth) in enumerate(val_loader):
339 |
340 | tgt_img = tgt_img.to(device)
341 | tgt_img_loss = tgt_img_loss.to(device)
342 | depth = depth.to(device)
343 |
344 | # check gt
345 | if depth.nelement() == 0:
346 | continue
347 |
348 | # compute output
349 | output_disp = disp_net(tgt_img)
350 |
351 | output_depth = 1/output_disp
352 | output_depth = output_depth[:, 0]
353 |
354 | if log_outputs and i < len(output_writers):
355 | if epoch == 0:
356 | output_writers[i].add_image('val Input', tensor2array_thermal(tgt_img[0]))
357 | output_writers[i].add_image('val Input_vis', tensor2array_thermal(tgt_img_loss[0]))
358 |
359 | depth_to_show = depth[0]
360 | output_writers[i].add_image('val GT Depth', tensor2array(depth_to_show, max_value=args.vis_depth_max), epoch)
361 | depth_to_show[depth_to_show == 0] = 1000
362 | disp_to_show = (1/depth_to_show).clamp(0, 10)
363 | output_writers[i].add_image('val GT Disparity', tensor2array(disp_to_show, max_value=None, colormap='magma'), epoch)
364 |
365 | output_writers[i].add_image('val Dispnet Pred', tensor2array(output_disp[0], max_value=None, colormap='magma'), epoch)
366 | output_writers[i].add_image('val Depth Pred', tensor2array(output_depth[0], max_value=args.vis_depth_max), epoch)
367 |
368 | if depth.nelement() != output_depth.nelement():
369 | b, h, w = depth.size()
370 | output_depth = torch.nn.functional.interpolate(output_depth.unsqueeze(1), [h, w]).squeeze(1)
371 |
372 | errors.update(compute_errors(depth, output_depth, args.scene_type))
373 |
374 | # measure elapsed time
375 | batch_time.update(time.time() - end)
376 | end = time.time()
377 | logger.valid_bar.update(i+1)
378 | if i % args.print_freq == 0:
379 | logger.valid_writer.write('valid: Time {} Abs Error {:.4f} ({:.4f})'.format(batch_time, errors.val[0], errors.avg[0]))
380 | logger.valid_bar.update(len(val_loader))
381 | return errors.avg, error_names
382 |
383 |
384 | @torch.no_grad()
385 | def validate_pose_with_gt(args, val_pose_loader, pose_net, epoch, logger, output_writers=[]):
386 | global device
387 | batch_time = AverageMeter()
388 | error_names = ['ATE', 'RE']
389 | errors = AverageMeter(i=len(error_names))
390 | log_outputs = len(output_writers) > 0
391 |
392 | # switch to evaluate mode
393 | pose_net.eval()
394 |
395 | end = time.time()
396 | logger.valid_bar.update(0)
397 |
398 | for i, (thr_imgs, poses_gt) in enumerate(val_pose_loader):
399 | thr_imgs = [img.to(device) for img in thr_imgs]
400 |
401 | # compute output
402 | global_pose = np.eye(4)
403 | poses = []
404 | poses.append(global_pose[0:3, :])
405 | for j in range(len(thr_imgs)-1):
406 | pose = pose_net(thr_imgs[j], thr_imgs[j + 1])
407 | if pose.shape[0] == 1:
408 | pose_mat = pose_vec2mat(pose).squeeze(0).cpu().numpy()
409 | else:
410 | pose_mat = pose_vec2mat(pose[[0]]).squeeze(0).cpu().numpy()
411 |
412 | pose_mat = np.vstack([pose_mat, np.array([0, 0, 0, 1])])
413 | global_pose = global_pose @ np.linalg.inv(pose_mat)
414 | poses.append(global_pose[0:3, :])
415 |
416 | final_poses = np.stack(poses, axis=0)
417 |
418 | errors.update(compute_pose_error(poses_gt[0].numpy(), final_poses))
419 |
420 | # measure elapsed time
421 | batch_time.update(time.time() - end)
422 | end = time.time()
423 | logger.valid_bar.update(i)
424 | if i % args.print_freq == 0:
425 | logger.valid_writer.write('valid: Time {} ATE Error {:.4f} ({:.4f})'.format(batch_time, errors.val[0], errors.avg[0]))
426 | logger.valid_bar.update(len(val_pose_loader))
427 | return errors.avg, error_names
428 |
429 | def compute_depth(disp_net, tgt_img, ref_imgs):
430 | disps = disp_net(tgt_img)
431 | tgt_depth = [1/disp for disp in disps]
432 |
433 | ref_depths = []
434 | for ref_img in ref_imgs:
435 | disps = disp_net(ref_img)
436 | ref_depth = [1/disp for disp in disps]
437 | ref_depths.append(ref_depth)
438 |
439 | return tgt_depth, ref_depths
440 |
441 | def compute_pose_with_inv(pose_net, tgt_img, ref_imgs):
442 | poses = []
443 | poses_inv = []
444 | for ref_img in ref_imgs:
445 | poses.append(pose_net(tgt_img, ref_img))
446 | poses_inv.append(pose_net(ref_img, tgt_img))
447 |
448 | return poses, poses_inv
449 |
450 | @torch.no_grad()
451 | def compute_pose_error(gt, pred):
452 | RE = 0
453 | snippet_length = gt.shape[0]
454 | scale_factor = np.sum(gt[:,:,-1] * pred[:,:,-1])/np.sum(pred[:,:,-1] ** 2)
455 | ATE = np.linalg.norm((gt[:,:,-1] - scale_factor * pred[:,:,-1]).reshape(-1))
456 | for gt_pose, pred_pose in zip(gt, pred):
457 | # Residual matrix to which we compute angle's sin and cos
458 | R = gt_pose[:,:3] @ np.linalg.inv(pred_pose[:,:3])
459 | s = np.linalg.norm([R[0,1]-R[1,0],
460 | R[1,2]-R[2,1],
461 | R[0,2]-R[2,0]])
462 | c = np.trace(R) - 1
463 | # Note: we actually compute double of cos and sin, but arctan2 is invariant to scale
464 | RE += np.arctan2(s,c)
465 |
466 | return [metric.item() for metric in [ATE/snippet_length, RE/snippet_length]]
467 |
468 | if __name__ == '__main__':
469 | main()
470 |
--------------------------------------------------------------------------------