├── .gitignore
├── src
└── rqt_virtual_joy
│ ├── __init__.py
│ ├── virtual_joy_module.py
│ └── joystickView.py
├── screenshot
└── window.png
├── resource
├── input-gaming.png
└── VirtualJoy.ui
├── CHANGELOG.rst
├── scripts
└── rqt_virtual_joy
├── setup.py
├── plugin.xml
├── README.md
├── LICENSE
├── package.xml
└── CMakeLists.txt
/.gitignore:
--------------------------------------------------------------------------------
1 | *.pcd
2 | *.pyc
--------------------------------------------------------------------------------
/src/rqt_virtual_joy/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/screenshot/window.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/aquahika/rqt_virtual_joystick/HEAD/screenshot/window.png
--------------------------------------------------------------------------------
/resource/input-gaming.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/aquahika/rqt_virtual_joystick/HEAD/resource/input-gaming.png
--------------------------------------------------------------------------------
/CHANGELOG.rst:
--------------------------------------------------------------------------------
1 | ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
2 | Changelog for package rqt_virtual_joy
3 | ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
4 |
5 | 0.1.2 (2020-05-09)
6 | ------------------
7 |
8 | * First Release
9 | * Contributors: Hikaru Sugiura
10 |
--------------------------------------------------------------------------------
/scripts/rqt_virtual_joy:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 |
3 | import sys
4 |
5 | from rqt_virtual_joy.virtual_joy_module import MyPlugin
6 | from rqt_gui.main import Main
7 |
8 | plugin = 'rqt_virtual_joy'
9 | main = Main(filename=plugin)
10 | sys.exit(main.main(standalone=plugin))
--------------------------------------------------------------------------------
/setup.py:
--------------------------------------------------------------------------------
1 | # -*- coding: utf-8 -*-
2 | from distutils.core import setup
3 | from catkin_pkg.python_setup import generate_distutils_setup
4 |
5 | d = generate_distutils_setup(
6 | packages=['rqt_virtual_joy'],
7 | scripts=['scripts/rqt_virtual_joy'],
8 | package_dir={'': 'src'},
9 | )
10 |
11 | setup(**d)
--------------------------------------------------------------------------------
/plugin.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 | An example Python GUI plugin to create a great user interface.
5 |
6 |
7 |
8 |
9 |
10 |
11 |
14 |
15 |
16 | resource/input-gaming.png
17 | Great user interface to provide real value.
18 |
19 |
20 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # rqt_virtual_joystick
2 | Simple rqt virtual joystick publish `sensor_msgs/Joy` message.
3 |
4 | 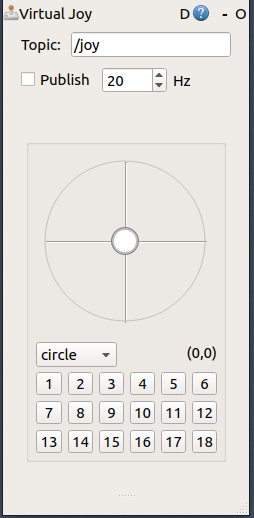 5 |
6 | ## Usage
7 |
8 | ```
9 | rqt_virtual_joystick
10 | ```
11 |
12 | or
13 |
14 | ```
15 | rosrun rqt_virtual_joystick rqt_virtual_joystick
16 | ```
17 |
18 | Check `Publish` box to start publishing.
19 |
20 |
21 | ## Options
22 |
23 | - -t [--topic] topic
24 | - Specify a initial topic to publish here. default: `/joy`
25 | - -r [--rate] hz
26 | - Initial publishing rate. default: `20Hz`
27 | - --type ( circle | square )
28 | - Select initial joystick type. default: `circle`
29 |
30 | ## Author
31 | Hikaru Sugiura
32 |
33 | ## License
34 |
35 | `input-gaming.png` icon from Tango Project is licensed under `CC-BY-SA`
36 | http://tango.freedesktop.org/
37 |
38 | Any other source codes are licenced under [MIT license](https://en.wikipedia.org/wiki/MIT_License).
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2020 Hikaru Sugiura
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
22 |
--------------------------------------------------------------------------------
/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | rqt_virtual_joy
4 | 0.1.2
5 | The rqt_virtual_joy package
6 |
7 | Hikaru Sugiura
8 |
9 | MIT
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 | Hikaru Sugiura
19 |
20 | std_msgs
21 | sensor_msgs
22 |
23 | catkin
24 | rospy
25 | rqt_gui
26 | rqt_gui_py
27 | rospy
28 | rqt_gui
29 | rqt_gui_py
30 | rospy
31 | rqt_gui
32 | rqt_gui_py
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
--------------------------------------------------------------------------------
/src/rqt_virtual_joy/virtual_joy_module.py:
--------------------------------------------------------------------------------
1 | import os
2 | import rospy
3 | import rospkg
4 | from sensor_msgs.msg import Joy
5 |
6 | from qt_gui.plugin import Plugin
7 | from python_qt_binding import loadUi
8 | from python_qt_binding.QtWidgets import QWidget,QGraphicsView
9 | from python_qt_binding.QtGui import QCursor
10 | from python_qt_binding import QtCore
11 |
12 |
13 | class MyPlugin(Plugin):
14 |
15 | def __init__(self, context):
16 |
17 | super(MyPlugin, self).__init__(context)
18 |
19 | # Give QObjects reasonable names
20 | self.setObjectName('MyPlugin')
21 |
22 | # Process standalone plugin command-line arguments
23 | from argparse import ArgumentParser
24 | parser = ArgumentParser()
25 | # Add argument(s) to the parser.
26 | parser.add_argument("-q", "--quiet", action="store_true",
27 | dest="quiet",
28 | help="Put plugin in silent mode")
29 | parser.add_argument("-t", "--topic",
30 | dest="topic",
31 | type=str,
32 | help="Set topic to publish [default:/joy]",
33 | default="/joy")
34 | parser.add_argument("-r", "--rate",
35 | dest="rate",
36 | type=float,
37 | help="Set publish rate [default:20]",
38 | default=20)
39 | parser.add_argument("--type",
40 | dest="type",
41 | type=str,
42 | choices=['circle', 'square'],
43 | default='circle')
44 |
45 |
46 | args, unknowns = parser.parse_known_args(context.argv())
47 | if not args.quiet:
48 | print 'arguments: ', args
49 | print 'unknowns: ', unknowns
50 |
51 | # Create QWidget
52 | self._widget = QWidget()
53 | # Get path to UI file which should be in the "resource" folder of this package
54 | ui_file = os.path.join(rospkg.RosPack().get_path('rqt_virtual_joy'), 'resource', 'VirtualJoy.ui')
55 | # Extend the widget with all attributes and children from UI file
56 | loadUi(ui_file, self._widget)
57 | # Give QObjects reasonable names
58 | self._widget.setObjectName('MyPluginUi')
59 | # Show _widget.windowTitle on left-top of each plugin (when
60 | # it's set in _widget). This is useful when you open multiple
61 | # plugins at once. Also if you open multiple instances of your
62 | # plugin at once, these lines add number to make it easy to
63 | # tell from pane to pane.
64 | if context.serial_number() > 1:
65 | self._widget.setWindowTitle(self._widget.windowTitle() + (' (%d)' % context.serial_number()))
66 | # Add widget to the user interface
67 | context.add_widget(self._widget)
68 |
69 | self._widget.topicLineEdit.returnPressed.connect(self.topicNameUpdated)
70 | self._widget.topicLineEdit.setText(args.topic) # Default Topic
71 | self.updatePublisher()
72 |
73 | self._widget.publishCheckBox.stateChanged.connect(self.publishCheckboxChanged)
74 | self._widget.rateSpinBox.valueChanged.connect(self.publishRateSpinBoxChanged)
75 | self._widget.rateSpinBox.setValue(args.rate)
76 |
77 | self._widget.joy.xMoved.connect(self.receiveX)
78 | self._widget.joy.yMoved.connect(self.receiveY)
79 |
80 | self._widget.shapeSelectBox.addItem("square")
81 | self._widget.shapeSelectBox.addItem("circle")
82 |
83 | self._widget.shapeSelectBox.activated.connect(self.indexChanged)
84 | self._widget.shapeSelectBox.setCurrentText(args.type) # circle
85 | self._widget.joy.setMode(args.type)
86 |
87 |
88 | def topicNameUpdated(self):
89 | self.updatePublisher()
90 |
91 |
92 | def updatePublisher(self):
93 | topic = str(self._widget.topicLineEdit.text())
94 | try:
95 | if self.pub != None:
96 | self.pub.unregister()
97 | except:
98 | pass
99 | self.pub = None
100 | self.pub = rospy.Publisher(topic, Joy,queue_size=10)
101 |
102 | def startIntervalTimer(self,msec):
103 |
104 | try:
105 | self._timer.stop()
106 | except:
107 | self._timer = QtCore.QTimer(self)
108 | self._timer.timeout.connect(self.processTimerShot)
109 |
110 | if msec > 0:
111 | self._timer.setInterval(msec)
112 | self._timer.start()
113 |
114 |
115 | def publishCheckboxChanged(self,status):
116 | self.updateROSPublishState()
117 |
118 | def publishRateSpinBoxChanged(self,status):
119 | self.updateROSPublishState()
120 |
121 | def updateROSPublishState(self):
122 |
123 | if self._widget.publishCheckBox.checkState() == QtCore.Qt.Checked:
124 | rate = self._widget.rateSpinBox.value()
125 | self.startIntervalTimer(float(1000.0/rate))
126 | else:
127 | self.startIntervalTimer(-1) # Stop Timer (Stop Publish)
128 |
129 |
130 | def indexChanged(self,index):
131 | text = str(self._widget.shapeSelectBox.currentText())
132 | self._widget.joy.setMode(str(text))
133 |
134 | def receiveX(self,val):
135 | self.updateJoyPosLabel()
136 |
137 | def receiveY(self,val):
138 | self.updateJoyPosLabel()
139 |
140 | def updateJoyPosLabel(self):
141 | pos = self.getROSJoyValue()
142 | text = "({:1.2f},{:1.2f})".format(pos['x'],pos['y'])
143 | self._widget.joyPosLabel.setText(text)
144 |
145 | def processTimerShot(self):
146 | joy = self.getROSJoyValue()
147 | msg = Joy()
148 | msg.header.stamp = rospy.Time.now()
149 | msg.axes.append(float(joy['x']))
150 | msg.axes.append(float(joy['y']))
151 |
152 | button_num = 1
153 | while True:
154 | try:
155 | msg.buttons.append(eval("self._widget.button"+str(button_num)).isDown())
156 | button_num+=1
157 | except:
158 | break
159 |
160 | try:
161 | self.pub.publish(msg)
162 | except:
163 | rospy.logwarn("publisher not initialized")
164 | pass
165 |
166 | def getROSJoyValue(self):
167 | return self._widget.joy.getJoyValue()
168 | #return self.convertREPCoordinate(self._widget.joy.getJoyValue())
169 |
170 | def convertREPCoordinate(self,input):
171 | output = {}
172 | output['x'] = input['y']
173 | output['y'] = input['x']
174 | return output
175 |
176 | def shutdown_plugin(self):
177 | # TODO unregister all publishers here
178 | self.pub.unregister()
179 | pass
180 |
181 | def save_settings(self, plugin_settings, instance_settings):
182 | # TODO save intrinsic configuration, usually using:
183 | # instance_settings.set_value(k, v)
184 | pass
185 |
186 | def restore_settings(self, plugin_settings, instance_settings):
187 | # TODO restore intrinsic configuration, usually using:
188 | # v = instance_settings.value(k)
189 | pass
190 |
191 | #def trigger_configuration(self):
192 | # Comment in to signal that the plugin has a way to configure
193 | # This will enable a setting button (gear icon) in each dock widget title bar
194 | # Usually used to open a modal configuration dialog
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 2.8.3)
2 | project(rqt_virtual_joy)
3 |
4 | ## Compile as C++11, supported in ROS Kinetic and newer
5 | # add_compile_options(-std=c++11)
6 |
7 | ## Find catkin macros and libraries
8 | ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
9 | ## is used, also find other catkin packages
10 | find_package(catkin REQUIRED COMPONENTS
11 | rospy
12 | rqt_gui
13 | rqt_gui_py
14 | )
15 |
16 | ## System dependencies are found with CMake's conventions
17 | # find_package(Boost REQUIRED COMPONENTS system)
18 |
19 |
20 | ## Uncomment this if the package has a setup.py. This macro ensures
21 | ## modules and global scripts declared therein get installed
22 | ## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
23 | catkin_python_setup()
24 |
25 | ################################################
26 | ## Declare ROS messages, services and actions ##
27 | ################################################
28 |
29 | ## To declare and build messages, services or actions from within this
30 | ## package, follow these steps:
31 | ## * Let MSG_DEP_SET be the set of packages whose message types you use in
32 | ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
33 | ## * In the file package.xml:
34 | ## * add a build_depend tag for "message_generation"
35 | ## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
36 | ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
37 | ## but can be declared for certainty nonetheless:
38 | ## * add a exec_depend tag for "message_runtime"
39 | ## * In this file (CMakeLists.txt):
40 | ## * add "message_generation" and every package in MSG_DEP_SET to
41 | ## find_package(catkin REQUIRED COMPONENTS ...)
42 | ## * add "message_runtime" and every package in MSG_DEP_SET to
43 | ## catkin_package(CATKIN_DEPENDS ...)
44 | ## * uncomment the add_*_files sections below as needed
45 | ## and list every .msg/.srv/.action file to be processed
46 | ## * uncomment the generate_messages entry below
47 | ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
48 |
49 | ## Generate messages in the 'msg' folder
50 | # add_message_files(
51 | # FILES
52 | # Message1.msg
53 | # Message2.msg
54 | # )
55 |
56 | ## Generate services in the 'srv' folder
57 | # add_service_files(
58 | # FILES
59 | # Service1.srv
60 | # Service2.srv
61 | # )
62 |
63 | ## Generate actions in the 'action' folder
64 | # add_action_files(
65 | # FILES
66 | # Action1.action
67 | # Action2.action
68 | # )
69 |
70 | ## Generate added messages and services with any dependencies listed here
71 | # generate_messages(
72 | # DEPENDENCIES
73 | # std_msgs # Or other packages containing msgs
74 | # )
75 |
76 | ################################################
77 | ## Declare ROS dynamic reconfigure parameters ##
78 | ################################################
79 |
80 | ## To declare and build dynamic reconfigure parameters within this
81 | ## package, follow these steps:
82 | ## * In the file package.xml:
83 | ## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
84 | ## * In this file (CMakeLists.txt):
85 | ## * add "dynamic_reconfigure" to
86 | ## find_package(catkin REQUIRED COMPONENTS ...)
87 | ## * uncomment the "generate_dynamic_reconfigure_options" section below
88 | ## and list every .cfg file to be processed
89 |
90 | ## Generate dynamic reconfigure parameters in the 'cfg' folder
91 | # generate_dynamic_reconfigure_options(
92 | # cfg/DynReconf1.cfg
93 | # cfg/DynReconf2.cfg
94 | # )
95 |
96 | ###################################
97 | ## catkin specific configuration ##
98 | ###################################
99 | ## The catkin_package macro generates cmake config files for your package
100 | ## Declare things to be passed to dependent projects
101 | ## INCLUDE_DIRS: uncomment this if your package contains header files
102 | ## LIBRARIES: libraries you create in this project that dependent projects also need
103 | ## CATKIN_DEPENDS: catkin_packages dependent projects also need
104 | ## DEPENDS: system dependencies of this project that dependent projects also need
105 | catkin_package(
106 | # INCLUDE_DIRS include
107 | # LIBRARIES rqt_virtual_joy
108 | # CATKIN_DEPENDS rospy rqt_gui rqt_gui_py
109 | # DEPENDS system_lib
110 | )
111 |
112 | ###########
113 | ## Build ##
114 | ###########
115 |
116 | ## Specify additional locations of header files
117 | ## Your package locations should be listed before other locations
118 | include_directories(
119 | # include
120 | ${catkin_INCLUDE_DIRS}
121 | )
122 |
123 | ## Declare a C++ library
124 | # add_library(${PROJECT_NAME}
125 | # src/${PROJECT_NAME}/rqt_virtual_joy.cpp
126 | # )
127 |
128 | ## Add cmake target dependencies of the library
129 | ## as an example, code may need to be generated before libraries
130 | ## either from message generation or dynamic reconfigure
131 | # add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
132 |
133 | ## Declare a C++ executable
134 | ## With catkin_make all packages are built within a single CMake context
135 | ## The recommended prefix ensures that target names across packages don't collide
136 | # add_executable(${PROJECT_NAME}_node src/rqt_virtual_joy_node.cpp)
137 |
138 | ## Rename C++ executable without prefix
139 | ## The above recommended prefix causes long target names, the following renames the
140 | ## target back to the shorter version for ease of user use
141 | ## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
142 | # set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
143 |
144 | ## Add cmake target dependencies of the executable
145 | ## same as for the library above
146 | # add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
147 |
148 | ## Specify libraries to link a library or executable target against
149 | # target_link_libraries(${PROJECT_NAME}_node
150 | # ${catkin_LIBRARIES}
151 | # )
152 |
153 | #############
154 | ## Install ##
155 | #############
156 |
157 | # all install targets should use catkin DESTINATION variables
158 | # See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
159 |
160 | ## Mark executable scripts (Python etc.) for installation
161 | ## in contrast to setup.py, you can choose the destination
162 | # install(PROGRAMS
163 | # scripts/my_python_script
164 | # DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
165 | # )
166 |
167 | ## Mark executables for installation
168 | ## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
169 | # install(TARGETS ${PROJECT_NAME}_node
170 | # RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
171 | # )
172 |
173 | ## Mark libraries for installation
174 | ## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
175 | # install(TARGETS ${PROJECT_NAME}
176 | # ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
177 | # LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
178 | # RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
179 | # )
180 |
181 | ## Mark cpp header files for installation
182 | # install(DIRECTORY include/${PROJECT_NAME}/
183 | # DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
184 | # FILES_MATCHING PATTERN "*.h"
185 | # PATTERN ".svn" EXCLUDE
186 | # )
187 |
188 | ## Mark other files for installation (e.g. launch and bag files, etc.)
189 | # install(FILES
190 | # # myfile1
191 | # # myfile2
192 | # DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
193 | # )
194 |
195 | #############
196 | ## Testing ##
197 | #############
198 |
199 | ## Add gtest based cpp test target and link libraries
200 | # catkin_add_gtest(${PROJECT_NAME}-test test/test_rqt_virtual_joy.cpp)
201 | # if(TARGET ${PROJECT_NAME}-test)
202 | # target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
203 | # endif()
204 |
205 | ## Add folders to be run by python nosetests
206 | # catkin_add_nosetests(test)
207 |
--------------------------------------------------------------------------------
/src/rqt_virtual_joy/joystickView.py:
--------------------------------------------------------------------------------
1 | from python_qt_binding import QtCore
2 | from python_qt_binding.QtGui import QPainter, QColor, QFont, QPen, QBrush
3 | from python_qt_binding.QtWidgets import QWidget,QGridLayout,QSizePolicy
4 | import math
5 |
6 |
7 |
8 | class JoystickView(QWidget):
9 |
10 | xMoved = QtCore.Signal(float)
11 | yMoved = QtCore.Signal(float)
12 |
13 | def __init__(self, parent = None):
14 | super(JoystickView, self).__init__(parent)
15 | self._initialized = False
16 | self._stickSize = 30
17 |
18 | self._stickView = JoystickPointView(self)
19 | self._stickView.xMoved.connect(self.receiveXMoved)
20 | self._stickView.yMoved.connect(self.receiveYMoved)
21 | self.setMode("square")
22 |
23 |
24 | def receiveXMoved(self,val):
25 | self.xMoved.emit(val)
26 |
27 | def receiveYMoved(self,val):
28 | self.yMoved.emit(val)
29 |
30 |
31 | def setMode(self,mode):
32 | self._mode = mode
33 | self._stickView.setMode(mode)
34 | self.repaint()
35 |
36 |
37 | def paintEvent(self,event):
38 | if not self._initialized:
39 | self.placeStickAtCenter()
40 | self._initialized = True
41 |
42 | borderWidth = 1
43 | joyRange = 80
44 | center = QtCore.QPoint(self.height()/2,self.width()/2)
45 |
46 | qp = QPainter()
47 | qp.begin(self)
48 | qp.setRenderHint(QPainter.Antialiasing, True)
49 | qp.setPen(QPen(QtCore.Qt.lightGray, borderWidth, QtCore.Qt.SolidLine, QtCore.Qt.RoundCap,QtCore.Qt.RoundJoin))
50 |
51 | if self._mode == "circle":
52 |
53 | qp.drawEllipse(center,joyRange,joyRange)
54 |
55 | if self._mode == "square":
56 | x = center.x() - joyRange
57 | y = center.y() - joyRange
58 | width = joyRange * 2
59 | height = joyRange * 2
60 | qp.drawRect(x,y,width,height)
61 |
62 | qp.end()
63 |
64 | super(JoystickView,self).paintEvent(event)
65 |
66 | def placeStickAtCenter(self):
67 | stickInitPosH = self.height()/2 - self._stickSize /2
68 | stickInitPosW = self.width()/2 - self._stickSize /2
69 | self._stickView.setGeometry(stickInitPosH,stickInitPosW,self._stickSize,self._stickSize)
70 |
71 | def getJoyValue(self):
72 | return self._stickView.getJoyValue()
73 |
74 |
75 |
76 | class JoystickPointView(QWidget):
77 |
78 | xMoved = QtCore.Signal(float)
79 | yMoved = QtCore.Signal(float)
80 |
81 | def __init__(self,parent = None):
82 | super(JoystickPointView,self).__init__(parent)
83 | self._range = 80
84 | self._mode = "circle"
85 |
86 |
87 | def paintEvent(self,event):
88 | super(JoystickPointView,self).paintEvent(event)
89 |
90 | try:
91 | if self._initialized:
92 | pass
93 | except:
94 | self._origPos = self.pos()
95 | self._initialized = True
96 |
97 | qp = QPainter()
98 | qp.begin(self)
99 |
100 | borderWidth = 2
101 | radius = self.height()/2
102 | center = QtCore.QPoint(self.height()/2,self.width()/2)
103 |
104 | # Outer Circle
105 | qp.setRenderHint(QPainter.Antialiasing, True)
106 | qp.setPen(QPen(QtCore.Qt.darkGray, borderWidth, QtCore.Qt.SolidLine, QtCore.Qt.RoundCap,QtCore.Qt.RoundJoin))
107 | qp.setBrush(QBrush(QtCore.Qt.white, QtCore.Qt.SolidPattern))
108 | qp.drawEllipse(center,radius-borderWidth,radius-borderWidth)
109 |
110 | # Inner Circle
111 | qp.setPen(QPen(QtCore.Qt.lightGray, borderWidth, QtCore.Qt.SolidLine, QtCore.Qt.RoundCap,QtCore.Qt.RoundJoin))
112 | qp.setBrush(QBrush(QtCore.Qt.white, QtCore.Qt.SolidPattern))
113 | qp.drawEllipse(center,radius-borderWidth-1,radius-borderWidth-1)
114 |
115 | qp.end()
116 |
117 |
118 | def mousePressEvent(self, event):
119 | self.__mousePressPos = None
120 | self.__mouseMovePos = None
121 | if event.button() == QtCore.Qt.LeftButton:
122 | self.setFocus()
123 | self.__mousePressPos = event.globalPos()
124 | self.__mouseMovePos = event.globalPos()
125 |
126 | super(JoystickPointView, self).mousePressEvent(event)
127 |
128 | def mouseMoveEvent(self, event):
129 | if event.buttons() == QtCore.Qt.LeftButton:
130 | if(self.__mouseMovePos == None):
131 | return
132 |
133 | currPos = self.mapToGlobal(self.pos())
134 | globalPos = event.globalPos()
135 | diff = globalPos - self.__mouseMovePos
136 | newPos = self.mapFromGlobal(currPos + diff)
137 |
138 |
139 | center = self.centerPos(newPos)
140 | origCenter = self.centerPos(self._origPos)
141 | relative = origCenter - center
142 |
143 | limited = self.limitStickMove(relative, self._mode)
144 |
145 | self._moveJoy(limited)
146 | self.__mouseMovePos = globalPos
147 |
148 | super(JoystickPointView, self).mouseMoveEvent(event)
149 |
150 | def mouseReleaseEvent(self, event):
151 |
152 | self._moveJoy(QtCore.QPoint(0,0))
153 |
154 | if self.__mousePressPos is not None:
155 | moved = event.globalPos() - self.__mousePressPos
156 | if moved.manhattanLength() > 3:
157 | event.ignore()
158 | return
159 |
160 | super(JoystickPointView, self).mouseReleaseEvent(event)
161 |
162 |
163 | def centerPos(self,pos = None):
164 | if pos is None:
165 | pos = self.pos()
166 | x = pos.x() + (self.width() / 2)
167 | y = pos.y() + (self.height() / 2)
168 | return QtCore.QPoint(x,y)
169 |
170 | def revertCenterPos(self, pos = None):
171 | if pos is None:
172 | pos = self.pos()
173 | x = pos.x() - (self.width() / 2)
174 | y = pos.y() - (self.height() / 2)
175 | return QtCore.QPoint(x,y)
176 |
177 | def limitStickMove(self,pos,mode = "square"):
178 | # Give joystick position from (0,0)
179 | x = 0
180 | y = 0
181 |
182 | if mode == "circle":
183 |
184 | norm = math.sqrt(pos.x() ** 2 + pos.y() ** 2)
185 |
186 | if norm > self._range:
187 | ratio = self._range / norm
188 | else:
189 | ratio = 1.0
190 |
191 | x = pos.x() * ratio
192 | y = pos.y() * ratio
193 |
194 |
195 | if mode == "square":
196 |
197 | if abs(pos.x()) > self._range:
198 | sign = pos.x() / abs(pos.x())
199 | x = sign * self._range
200 | else:
201 | x = pos.x()
202 |
203 | if abs(pos.y()) > self._range:
204 | sign = pos.y() / abs(pos.y())
205 | y = sign * self._range
206 | else:
207 | y = pos.y()
208 |
209 | return QtCore.QPoint(x,y)
210 |
211 | def setMode(self,mode):
212 | self._mode = mode
213 |
214 | def setRange(self,value):
215 | self._range = value
216 |
217 | def getJoyValue(self):
218 | try:
219 | center = self.centerPos(self.pos())
220 | origCenter = self.centerPos(self._origPos)
221 | relative = origCenter - center
222 |
223 | x = float(relative.x()) / self._range
224 | y = float(relative.y()) / self._range
225 |
226 | except:
227 | x = float(0.0)
228 | y = float(0.0)
229 |
230 | return {'x': x, 'y': y}
231 |
232 | def _moveJoy(self,relative):
233 |
234 | pastJoyPos = self.getJoyValue()
235 |
236 | origCenter = self.centerPos(self._origPos)
237 | newCenter = origCenter - relative
238 | self.move(self.revertCenterPos(newCenter))
239 |
240 | newJoyPos = self.getJoyValue()
241 |
242 | if(pastJoyPos['x'] != newJoyPos['x']):
243 | self.xMoved.emit(newJoyPos['x'])
244 | if(pastJoyPos['y'] != newJoyPos['y']):
245 | self.yMoved.emit(newJoyPos['y'])
246 |
247 |
248 |
249 |
250 |
251 |
--------------------------------------------------------------------------------
/resource/VirtualJoy.ui:
--------------------------------------------------------------------------------
1 |
2 |
3 | Form
4 |
5 |
6 |
7 | 0
8 | 0
9 | 510
10 | 433
11 |
12 |
13 |
14 | Virtual Joystick
15 |
16 |
17 |
5 |
6 | ## Usage
7 |
8 | ```
9 | rqt_virtual_joystick
10 | ```
11 |
12 | or
13 |
14 | ```
15 | rosrun rqt_virtual_joystick rqt_virtual_joystick
16 | ```
17 |
18 | Check `Publish` box to start publishing.
19 |
20 |
21 | ## Options
22 |
23 | - -t [--topic] topic
24 | - Specify a initial topic to publish here. default: `/joy`
25 | - -r [--rate] hz
26 | - Initial publishing rate. default: `20Hz`
27 | - --type ( circle | square )
28 | - Select initial joystick type. default: `circle`
29 |
30 | ## Author
31 | Hikaru Sugiura
32 |
33 | ## License
34 |
35 | `input-gaming.png` icon from Tango Project is licensed under `CC-BY-SA`
36 | http://tango.freedesktop.org/
37 |
38 | Any other source codes are licenced under [MIT license](https://en.wikipedia.org/wiki/MIT_License).
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2020 Hikaru Sugiura
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
22 |
--------------------------------------------------------------------------------
/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | rqt_virtual_joy
4 | 0.1.2
5 | The rqt_virtual_joy package
6 |
7 | Hikaru Sugiura
8 |
9 | MIT
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 | Hikaru Sugiura
19 |
20 | std_msgs
21 | sensor_msgs
22 |
23 | catkin
24 | rospy
25 | rqt_gui
26 | rqt_gui_py
27 | rospy
28 | rqt_gui
29 | rqt_gui_py
30 | rospy
31 | rqt_gui
32 | rqt_gui_py
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
--------------------------------------------------------------------------------
/src/rqt_virtual_joy/virtual_joy_module.py:
--------------------------------------------------------------------------------
1 | import os
2 | import rospy
3 | import rospkg
4 | from sensor_msgs.msg import Joy
5 |
6 | from qt_gui.plugin import Plugin
7 | from python_qt_binding import loadUi
8 | from python_qt_binding.QtWidgets import QWidget,QGraphicsView
9 | from python_qt_binding.QtGui import QCursor
10 | from python_qt_binding import QtCore
11 |
12 |
13 | class MyPlugin(Plugin):
14 |
15 | def __init__(self, context):
16 |
17 | super(MyPlugin, self).__init__(context)
18 |
19 | # Give QObjects reasonable names
20 | self.setObjectName('MyPlugin')
21 |
22 | # Process standalone plugin command-line arguments
23 | from argparse import ArgumentParser
24 | parser = ArgumentParser()
25 | # Add argument(s) to the parser.
26 | parser.add_argument("-q", "--quiet", action="store_true",
27 | dest="quiet",
28 | help="Put plugin in silent mode")
29 | parser.add_argument("-t", "--topic",
30 | dest="topic",
31 | type=str,
32 | help="Set topic to publish [default:/joy]",
33 | default="/joy")
34 | parser.add_argument("-r", "--rate",
35 | dest="rate",
36 | type=float,
37 | help="Set publish rate [default:20]",
38 | default=20)
39 | parser.add_argument("--type",
40 | dest="type",
41 | type=str,
42 | choices=['circle', 'square'],
43 | default='circle')
44 |
45 |
46 | args, unknowns = parser.parse_known_args(context.argv())
47 | if not args.quiet:
48 | print 'arguments: ', args
49 | print 'unknowns: ', unknowns
50 |
51 | # Create QWidget
52 | self._widget = QWidget()
53 | # Get path to UI file which should be in the "resource" folder of this package
54 | ui_file = os.path.join(rospkg.RosPack().get_path('rqt_virtual_joy'), 'resource', 'VirtualJoy.ui')
55 | # Extend the widget with all attributes and children from UI file
56 | loadUi(ui_file, self._widget)
57 | # Give QObjects reasonable names
58 | self._widget.setObjectName('MyPluginUi')
59 | # Show _widget.windowTitle on left-top of each plugin (when
60 | # it's set in _widget). This is useful when you open multiple
61 | # plugins at once. Also if you open multiple instances of your
62 | # plugin at once, these lines add number to make it easy to
63 | # tell from pane to pane.
64 | if context.serial_number() > 1:
65 | self._widget.setWindowTitle(self._widget.windowTitle() + (' (%d)' % context.serial_number()))
66 | # Add widget to the user interface
67 | context.add_widget(self._widget)
68 |
69 | self._widget.topicLineEdit.returnPressed.connect(self.topicNameUpdated)
70 | self._widget.topicLineEdit.setText(args.topic) # Default Topic
71 | self.updatePublisher()
72 |
73 | self._widget.publishCheckBox.stateChanged.connect(self.publishCheckboxChanged)
74 | self._widget.rateSpinBox.valueChanged.connect(self.publishRateSpinBoxChanged)
75 | self._widget.rateSpinBox.setValue(args.rate)
76 |
77 | self._widget.joy.xMoved.connect(self.receiveX)
78 | self._widget.joy.yMoved.connect(self.receiveY)
79 |
80 | self._widget.shapeSelectBox.addItem("square")
81 | self._widget.shapeSelectBox.addItem("circle")
82 |
83 | self._widget.shapeSelectBox.activated.connect(self.indexChanged)
84 | self._widget.shapeSelectBox.setCurrentText(args.type) # circle
85 | self._widget.joy.setMode(args.type)
86 |
87 |
88 | def topicNameUpdated(self):
89 | self.updatePublisher()
90 |
91 |
92 | def updatePublisher(self):
93 | topic = str(self._widget.topicLineEdit.text())
94 | try:
95 | if self.pub != None:
96 | self.pub.unregister()
97 | except:
98 | pass
99 | self.pub = None
100 | self.pub = rospy.Publisher(topic, Joy,queue_size=10)
101 |
102 | def startIntervalTimer(self,msec):
103 |
104 | try:
105 | self._timer.stop()
106 | except:
107 | self._timer = QtCore.QTimer(self)
108 | self._timer.timeout.connect(self.processTimerShot)
109 |
110 | if msec > 0:
111 | self._timer.setInterval(msec)
112 | self._timer.start()
113 |
114 |
115 | def publishCheckboxChanged(self,status):
116 | self.updateROSPublishState()
117 |
118 | def publishRateSpinBoxChanged(self,status):
119 | self.updateROSPublishState()
120 |
121 | def updateROSPublishState(self):
122 |
123 | if self._widget.publishCheckBox.checkState() == QtCore.Qt.Checked:
124 | rate = self._widget.rateSpinBox.value()
125 | self.startIntervalTimer(float(1000.0/rate))
126 | else:
127 | self.startIntervalTimer(-1) # Stop Timer (Stop Publish)
128 |
129 |
130 | def indexChanged(self,index):
131 | text = str(self._widget.shapeSelectBox.currentText())
132 | self._widget.joy.setMode(str(text))
133 |
134 | def receiveX(self,val):
135 | self.updateJoyPosLabel()
136 |
137 | def receiveY(self,val):
138 | self.updateJoyPosLabel()
139 |
140 | def updateJoyPosLabel(self):
141 | pos = self.getROSJoyValue()
142 | text = "({:1.2f},{:1.2f})".format(pos['x'],pos['y'])
143 | self._widget.joyPosLabel.setText(text)
144 |
145 | def processTimerShot(self):
146 | joy = self.getROSJoyValue()
147 | msg = Joy()
148 | msg.header.stamp = rospy.Time.now()
149 | msg.axes.append(float(joy['x']))
150 | msg.axes.append(float(joy['y']))
151 |
152 | button_num = 1
153 | while True:
154 | try:
155 | msg.buttons.append(eval("self._widget.button"+str(button_num)).isDown())
156 | button_num+=1
157 | except:
158 | break
159 |
160 | try:
161 | self.pub.publish(msg)
162 | except:
163 | rospy.logwarn("publisher not initialized")
164 | pass
165 |
166 | def getROSJoyValue(self):
167 | return self._widget.joy.getJoyValue()
168 | #return self.convertREPCoordinate(self._widget.joy.getJoyValue())
169 |
170 | def convertREPCoordinate(self,input):
171 | output = {}
172 | output['x'] = input['y']
173 | output['y'] = input['x']
174 | return output
175 |
176 | def shutdown_plugin(self):
177 | # TODO unregister all publishers here
178 | self.pub.unregister()
179 | pass
180 |
181 | def save_settings(self, plugin_settings, instance_settings):
182 | # TODO save intrinsic configuration, usually using:
183 | # instance_settings.set_value(k, v)
184 | pass
185 |
186 | def restore_settings(self, plugin_settings, instance_settings):
187 | # TODO restore intrinsic configuration, usually using:
188 | # v = instance_settings.value(k)
189 | pass
190 |
191 | #def trigger_configuration(self):
192 | # Comment in to signal that the plugin has a way to configure
193 | # This will enable a setting button (gear icon) in each dock widget title bar
194 | # Usually used to open a modal configuration dialog
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 2.8.3)
2 | project(rqt_virtual_joy)
3 |
4 | ## Compile as C++11, supported in ROS Kinetic and newer
5 | # add_compile_options(-std=c++11)
6 |
7 | ## Find catkin macros and libraries
8 | ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
9 | ## is used, also find other catkin packages
10 | find_package(catkin REQUIRED COMPONENTS
11 | rospy
12 | rqt_gui
13 | rqt_gui_py
14 | )
15 |
16 | ## System dependencies are found with CMake's conventions
17 | # find_package(Boost REQUIRED COMPONENTS system)
18 |
19 |
20 | ## Uncomment this if the package has a setup.py. This macro ensures
21 | ## modules and global scripts declared therein get installed
22 | ## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
23 | catkin_python_setup()
24 |
25 | ################################################
26 | ## Declare ROS messages, services and actions ##
27 | ################################################
28 |
29 | ## To declare and build messages, services or actions from within this
30 | ## package, follow these steps:
31 | ## * Let MSG_DEP_SET be the set of packages whose message types you use in
32 | ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
33 | ## * In the file package.xml:
34 | ## * add a build_depend tag for "message_generation"
35 | ## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
36 | ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
37 | ## but can be declared for certainty nonetheless:
38 | ## * add a exec_depend tag for "message_runtime"
39 | ## * In this file (CMakeLists.txt):
40 | ## * add "message_generation" and every package in MSG_DEP_SET to
41 | ## find_package(catkin REQUIRED COMPONENTS ...)
42 | ## * add "message_runtime" and every package in MSG_DEP_SET to
43 | ## catkin_package(CATKIN_DEPENDS ...)
44 | ## * uncomment the add_*_files sections below as needed
45 | ## and list every .msg/.srv/.action file to be processed
46 | ## * uncomment the generate_messages entry below
47 | ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
48 |
49 | ## Generate messages in the 'msg' folder
50 | # add_message_files(
51 | # FILES
52 | # Message1.msg
53 | # Message2.msg
54 | # )
55 |
56 | ## Generate services in the 'srv' folder
57 | # add_service_files(
58 | # FILES
59 | # Service1.srv
60 | # Service2.srv
61 | # )
62 |
63 | ## Generate actions in the 'action' folder
64 | # add_action_files(
65 | # FILES
66 | # Action1.action
67 | # Action2.action
68 | # )
69 |
70 | ## Generate added messages and services with any dependencies listed here
71 | # generate_messages(
72 | # DEPENDENCIES
73 | # std_msgs # Or other packages containing msgs
74 | # )
75 |
76 | ################################################
77 | ## Declare ROS dynamic reconfigure parameters ##
78 | ################################################
79 |
80 | ## To declare and build dynamic reconfigure parameters within this
81 | ## package, follow these steps:
82 | ## * In the file package.xml:
83 | ## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
84 | ## * In this file (CMakeLists.txt):
85 | ## * add "dynamic_reconfigure" to
86 | ## find_package(catkin REQUIRED COMPONENTS ...)
87 | ## * uncomment the "generate_dynamic_reconfigure_options" section below
88 | ## and list every .cfg file to be processed
89 |
90 | ## Generate dynamic reconfigure parameters in the 'cfg' folder
91 | # generate_dynamic_reconfigure_options(
92 | # cfg/DynReconf1.cfg
93 | # cfg/DynReconf2.cfg
94 | # )
95 |
96 | ###################################
97 | ## catkin specific configuration ##
98 | ###################################
99 | ## The catkin_package macro generates cmake config files for your package
100 | ## Declare things to be passed to dependent projects
101 | ## INCLUDE_DIRS: uncomment this if your package contains header files
102 | ## LIBRARIES: libraries you create in this project that dependent projects also need
103 | ## CATKIN_DEPENDS: catkin_packages dependent projects also need
104 | ## DEPENDS: system dependencies of this project that dependent projects also need
105 | catkin_package(
106 | # INCLUDE_DIRS include
107 | # LIBRARIES rqt_virtual_joy
108 | # CATKIN_DEPENDS rospy rqt_gui rqt_gui_py
109 | # DEPENDS system_lib
110 | )
111 |
112 | ###########
113 | ## Build ##
114 | ###########
115 |
116 | ## Specify additional locations of header files
117 | ## Your package locations should be listed before other locations
118 | include_directories(
119 | # include
120 | ${catkin_INCLUDE_DIRS}
121 | )
122 |
123 | ## Declare a C++ library
124 | # add_library(${PROJECT_NAME}
125 | # src/${PROJECT_NAME}/rqt_virtual_joy.cpp
126 | # )
127 |
128 | ## Add cmake target dependencies of the library
129 | ## as an example, code may need to be generated before libraries
130 | ## either from message generation or dynamic reconfigure
131 | # add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
132 |
133 | ## Declare a C++ executable
134 | ## With catkin_make all packages are built within a single CMake context
135 | ## The recommended prefix ensures that target names across packages don't collide
136 | # add_executable(${PROJECT_NAME}_node src/rqt_virtual_joy_node.cpp)
137 |
138 | ## Rename C++ executable without prefix
139 | ## The above recommended prefix causes long target names, the following renames the
140 | ## target back to the shorter version for ease of user use
141 | ## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
142 | # set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
143 |
144 | ## Add cmake target dependencies of the executable
145 | ## same as for the library above
146 | # add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
147 |
148 | ## Specify libraries to link a library or executable target against
149 | # target_link_libraries(${PROJECT_NAME}_node
150 | # ${catkin_LIBRARIES}
151 | # )
152 |
153 | #############
154 | ## Install ##
155 | #############
156 |
157 | # all install targets should use catkin DESTINATION variables
158 | # See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
159 |
160 | ## Mark executable scripts (Python etc.) for installation
161 | ## in contrast to setup.py, you can choose the destination
162 | # install(PROGRAMS
163 | # scripts/my_python_script
164 | # DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
165 | # )
166 |
167 | ## Mark executables for installation
168 | ## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
169 | # install(TARGETS ${PROJECT_NAME}_node
170 | # RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
171 | # )
172 |
173 | ## Mark libraries for installation
174 | ## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
175 | # install(TARGETS ${PROJECT_NAME}
176 | # ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
177 | # LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
178 | # RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
179 | # )
180 |
181 | ## Mark cpp header files for installation
182 | # install(DIRECTORY include/${PROJECT_NAME}/
183 | # DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
184 | # FILES_MATCHING PATTERN "*.h"
185 | # PATTERN ".svn" EXCLUDE
186 | # )
187 |
188 | ## Mark other files for installation (e.g. launch and bag files, etc.)
189 | # install(FILES
190 | # # myfile1
191 | # # myfile2
192 | # DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
193 | # )
194 |
195 | #############
196 | ## Testing ##
197 | #############
198 |
199 | ## Add gtest based cpp test target and link libraries
200 | # catkin_add_gtest(${PROJECT_NAME}-test test/test_rqt_virtual_joy.cpp)
201 | # if(TARGET ${PROJECT_NAME}-test)
202 | # target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
203 | # endif()
204 |
205 | ## Add folders to be run by python nosetests
206 | # catkin_add_nosetests(test)
207 |
--------------------------------------------------------------------------------
/src/rqt_virtual_joy/joystickView.py:
--------------------------------------------------------------------------------
1 | from python_qt_binding import QtCore
2 | from python_qt_binding.QtGui import QPainter, QColor, QFont, QPen, QBrush
3 | from python_qt_binding.QtWidgets import QWidget,QGridLayout,QSizePolicy
4 | import math
5 |
6 |
7 |
8 | class JoystickView(QWidget):
9 |
10 | xMoved = QtCore.Signal(float)
11 | yMoved = QtCore.Signal(float)
12 |
13 | def __init__(self, parent = None):
14 | super(JoystickView, self).__init__(parent)
15 | self._initialized = False
16 | self._stickSize = 30
17 |
18 | self._stickView = JoystickPointView(self)
19 | self._stickView.xMoved.connect(self.receiveXMoved)
20 | self._stickView.yMoved.connect(self.receiveYMoved)
21 | self.setMode("square")
22 |
23 |
24 | def receiveXMoved(self,val):
25 | self.xMoved.emit(val)
26 |
27 | def receiveYMoved(self,val):
28 | self.yMoved.emit(val)
29 |
30 |
31 | def setMode(self,mode):
32 | self._mode = mode
33 | self._stickView.setMode(mode)
34 | self.repaint()
35 |
36 |
37 | def paintEvent(self,event):
38 | if not self._initialized:
39 | self.placeStickAtCenter()
40 | self._initialized = True
41 |
42 | borderWidth = 1
43 | joyRange = 80
44 | center = QtCore.QPoint(self.height()/2,self.width()/2)
45 |
46 | qp = QPainter()
47 | qp.begin(self)
48 | qp.setRenderHint(QPainter.Antialiasing, True)
49 | qp.setPen(QPen(QtCore.Qt.lightGray, borderWidth, QtCore.Qt.SolidLine, QtCore.Qt.RoundCap,QtCore.Qt.RoundJoin))
50 |
51 | if self._mode == "circle":
52 |
53 | qp.drawEllipse(center,joyRange,joyRange)
54 |
55 | if self._mode == "square":
56 | x = center.x() - joyRange
57 | y = center.y() - joyRange
58 | width = joyRange * 2
59 | height = joyRange * 2
60 | qp.drawRect(x,y,width,height)
61 |
62 | qp.end()
63 |
64 | super(JoystickView,self).paintEvent(event)
65 |
66 | def placeStickAtCenter(self):
67 | stickInitPosH = self.height()/2 - self._stickSize /2
68 | stickInitPosW = self.width()/2 - self._stickSize /2
69 | self._stickView.setGeometry(stickInitPosH,stickInitPosW,self._stickSize,self._stickSize)
70 |
71 | def getJoyValue(self):
72 | return self._stickView.getJoyValue()
73 |
74 |
75 |
76 | class JoystickPointView(QWidget):
77 |
78 | xMoved = QtCore.Signal(float)
79 | yMoved = QtCore.Signal(float)
80 |
81 | def __init__(self,parent = None):
82 | super(JoystickPointView,self).__init__(parent)
83 | self._range = 80
84 | self._mode = "circle"
85 |
86 |
87 | def paintEvent(self,event):
88 | super(JoystickPointView,self).paintEvent(event)
89 |
90 | try:
91 | if self._initialized:
92 | pass
93 | except:
94 | self._origPos = self.pos()
95 | self._initialized = True
96 |
97 | qp = QPainter()
98 | qp.begin(self)
99 |
100 | borderWidth = 2
101 | radius = self.height()/2
102 | center = QtCore.QPoint(self.height()/2,self.width()/2)
103 |
104 | # Outer Circle
105 | qp.setRenderHint(QPainter.Antialiasing, True)
106 | qp.setPen(QPen(QtCore.Qt.darkGray, borderWidth, QtCore.Qt.SolidLine, QtCore.Qt.RoundCap,QtCore.Qt.RoundJoin))
107 | qp.setBrush(QBrush(QtCore.Qt.white, QtCore.Qt.SolidPattern))
108 | qp.drawEllipse(center,radius-borderWidth,radius-borderWidth)
109 |
110 | # Inner Circle
111 | qp.setPen(QPen(QtCore.Qt.lightGray, borderWidth, QtCore.Qt.SolidLine, QtCore.Qt.RoundCap,QtCore.Qt.RoundJoin))
112 | qp.setBrush(QBrush(QtCore.Qt.white, QtCore.Qt.SolidPattern))
113 | qp.drawEllipse(center,radius-borderWidth-1,radius-borderWidth-1)
114 |
115 | qp.end()
116 |
117 |
118 | def mousePressEvent(self, event):
119 | self.__mousePressPos = None
120 | self.__mouseMovePos = None
121 | if event.button() == QtCore.Qt.LeftButton:
122 | self.setFocus()
123 | self.__mousePressPos = event.globalPos()
124 | self.__mouseMovePos = event.globalPos()
125 |
126 | super(JoystickPointView, self).mousePressEvent(event)
127 |
128 | def mouseMoveEvent(self, event):
129 | if event.buttons() == QtCore.Qt.LeftButton:
130 | if(self.__mouseMovePos == None):
131 | return
132 |
133 | currPos = self.mapToGlobal(self.pos())
134 | globalPos = event.globalPos()
135 | diff = globalPos - self.__mouseMovePos
136 | newPos = self.mapFromGlobal(currPos + diff)
137 |
138 |
139 | center = self.centerPos(newPos)
140 | origCenter = self.centerPos(self._origPos)
141 | relative = origCenter - center
142 |
143 | limited = self.limitStickMove(relative, self._mode)
144 |
145 | self._moveJoy(limited)
146 | self.__mouseMovePos = globalPos
147 |
148 | super(JoystickPointView, self).mouseMoveEvent(event)
149 |
150 | def mouseReleaseEvent(self, event):
151 |
152 | self._moveJoy(QtCore.QPoint(0,0))
153 |
154 | if self.__mousePressPos is not None:
155 | moved = event.globalPos() - self.__mousePressPos
156 | if moved.manhattanLength() > 3:
157 | event.ignore()
158 | return
159 |
160 | super(JoystickPointView, self).mouseReleaseEvent(event)
161 |
162 |
163 | def centerPos(self,pos = None):
164 | if pos is None:
165 | pos = self.pos()
166 | x = pos.x() + (self.width() / 2)
167 | y = pos.y() + (self.height() / 2)
168 | return QtCore.QPoint(x,y)
169 |
170 | def revertCenterPos(self, pos = None):
171 | if pos is None:
172 | pos = self.pos()
173 | x = pos.x() - (self.width() / 2)
174 | y = pos.y() - (self.height() / 2)
175 | return QtCore.QPoint(x,y)
176 |
177 | def limitStickMove(self,pos,mode = "square"):
178 | # Give joystick position from (0,0)
179 | x = 0
180 | y = 0
181 |
182 | if mode == "circle":
183 |
184 | norm = math.sqrt(pos.x() ** 2 + pos.y() ** 2)
185 |
186 | if norm > self._range:
187 | ratio = self._range / norm
188 | else:
189 | ratio = 1.0
190 |
191 | x = pos.x() * ratio
192 | y = pos.y() * ratio
193 |
194 |
195 | if mode == "square":
196 |
197 | if abs(pos.x()) > self._range:
198 | sign = pos.x() / abs(pos.x())
199 | x = sign * self._range
200 | else:
201 | x = pos.x()
202 |
203 | if abs(pos.y()) > self._range:
204 | sign = pos.y() / abs(pos.y())
205 | y = sign * self._range
206 | else:
207 | y = pos.y()
208 |
209 | return QtCore.QPoint(x,y)
210 |
211 | def setMode(self,mode):
212 | self._mode = mode
213 |
214 | def setRange(self,value):
215 | self._range = value
216 |
217 | def getJoyValue(self):
218 | try:
219 | center = self.centerPos(self.pos())
220 | origCenter = self.centerPos(self._origPos)
221 | relative = origCenter - center
222 |
223 | x = float(relative.x()) / self._range
224 | y = float(relative.y()) / self._range
225 |
226 | except:
227 | x = float(0.0)
228 | y = float(0.0)
229 |
230 | return {'x': x, 'y': y}
231 |
232 | def _moveJoy(self,relative):
233 |
234 | pastJoyPos = self.getJoyValue()
235 |
236 | origCenter = self.centerPos(self._origPos)
237 | newCenter = origCenter - relative
238 | self.move(self.revertCenterPos(newCenter))
239 |
240 | newJoyPos = self.getJoyValue()
241 |
242 | if(pastJoyPos['x'] != newJoyPos['x']):
243 | self.xMoved.emit(newJoyPos['x'])
244 | if(pastJoyPos['y'] != newJoyPos['y']):
245 | self.yMoved.emit(newJoyPos['y'])
246 |
247 |
248 |
249 |
250 |
251 |
--------------------------------------------------------------------------------
/resource/VirtualJoy.ui:
--------------------------------------------------------------------------------
1 |
2 |
3 | Form
4 |
5 |
6 |
7 | 0
8 | 0
9 | 510
10 | 433
11 |
12 |
13 |
14 | Virtual Joystick
15 |
16 |
17 | -
18 |
19 |
20 |
21 | 0
22 | 0
23 |
24 |
25 |
26 |
27 | 0
28 |
29 |
30 | 2
31 |
32 |
33 | 2
34 |
35 |
-
36 |
37 |
38 |
39 | 0
40 | 0
41 |
42 |
43 |
44 |
45 | 50
46 | 0
47 |
48 |
49 |
50 | Topic:
51 |
52 |
53 | Qt::AlignLeading|Qt::AlignLeft|Qt::AlignVCenter
54 |
55 |
56 |
57 | -
58 |
59 |
60 |
61 | 0
62 | 0
63 |
64 |
65 |
66 |
67 | 160
68 | 0
69 |
70 |
71 |
72 |
73 |
74 |
75 | false
76 |
77 |
78 |
79 |
80 |
81 |
82 | -
83 |
84 |
85 |
86 | 0
87 | 0
88 |
89 |
90 |
91 |
92 | 0
93 | 0
94 |
95 |
96 |
97 |
98 | 2
99 |
100 |
101 | 2
102 |
103 |
-
104 |
105 |
106 |
107 | 0
108 | 0
109 |
110 |
111 |
112 |
113 | 40
114 | 20
115 |
116 |
117 |
118 | Publish
119 |
120 |
121 |
122 | -
123 |
124 |
125 |
126 | 0
127 | 0
128 |
129 |
130 |
131 | 1
132 |
133 |
134 | 1000
135 |
136 |
137 | 10
138 |
139 |
140 |
141 | -
142 |
143 |
144 |
145 | 0
146 | 0
147 |
148 |
149 |
150 |
151 | 10
152 | 0
153 |
154 |
155 |
156 | Hz
157 |
158 |
159 | Qt::AlignLeading|Qt::AlignLeft|Qt::AlignVCenter
160 |
161 |
162 |
163 | -
164 |
165 |
166 | Qt::Horizontal
167 |
168 |
169 |
170 | 40
171 | 5
172 |
173 |
174 |
175 |
176 |
177 |
178 |
179 | -
180 |
181 |
182 |
183 | 2
184 |
185 |
186 | 2
187 |
188 |
-
189 |
190 |
191 | Qt::Horizontal
192 |
193 |
194 |
195 | 40
196 | 20
197 |
198 |
199 |
200 |
201 | -
202 |
203 |
204 |
205 | 0
206 | 0
207 |
208 |
209 |
210 |
211 | 200
212 | 340
213 |
214 |
215 |
216 |
217 |
218 |
219 | false
220 |
221 |
222 | false
223 |
224 |
225 |
226 |
227 | 110
228 | 220
229 | 81
230 | 21
231 |
232 |
233 |
234 | (0,0)
235 |
236 |
237 | Qt::PlainText
238 |
239 |
240 | Qt::AlignRight|Qt::AlignTrailing|Qt::AlignVCenter
241 |
242 |
243 |
244 |
245 |
246 | 20
247 | 110
248 | 161
249 | 21
250 |
251 |
252 |
253 | Qt::Horizontal
254 |
255 |
256 |
257 |
258 |
259 | 10
260 | 220
261 | 81
262 | 25
263 |
264 |
265 |
266 |
267 |
268 |
269 |
270 |
271 |
272 | 90
273 | 40
274 | 21
275 | 161
276 |
277 |
278 |
279 | Qt::Vertical
280 |
281 |
282 |
283 |
284 |
285 | -1
286 | 19
287 | 201
288 | 201
289 |
290 |
291 |
292 |
293 |
294 |
295 | 10
296 | 250
297 | 181
298 | 81
299 |
300 |
301 |
302 |
-
303 |
304 |
305 | 6
306 |
307 |
308 |
309 | -
310 |
311 |
312 | 8
313 |
314 |
315 |
316 | -
317 |
318 |
319 |
320 | 0
321 | 0
322 |
323 |
324 |
325 | 1
326 |
327 |
328 |
329 | -
330 |
331 |
332 | 5
333 |
334 |
335 |
336 | -
337 |
338 |
339 | 10
340 |
341 |
342 |
343 | -
344 |
345 |
346 | 12
347 |
348 |
349 |
350 | -
351 |
352 |
353 | 9
354 |
355 |
356 |
357 | -
358 |
359 |
360 | 2
361 |
362 |
363 |
364 | -
365 |
366 |
367 | 4
368 |
369 |
370 |
371 | -
372 |
373 |
374 | 11
375 |
376 |
377 |
378 | -
379 |
380 |
381 | 7
382 |
383 |
384 |
385 | -
386 |
387 |
388 | 3
389 |
390 |
391 |
392 | -
393 |
394 |
395 | 13
396 |
397 |
398 |
399 | -
400 |
401 |
402 | 14
403 |
404 |
405 |
406 | -
407 |
408 |
409 | 15
410 |
411 |
412 |
413 | -
414 |
415 |
416 | 16
417 |
418 |
419 |
420 | -
421 |
422 |
423 | 17
424 |
425 |
426 |
427 | -
428 |
429 |
430 | 18
431 |
432 |
433 |
434 |
435 |
436 |
437 |
438 | -
439 |
440 |
441 | Qt::Horizontal
442 |
443 |
444 |
445 | 40
446 | 20
447 |
448 |
449 |
450 |
451 |
452 |
453 |
454 |
455 |
456 |
457 |
458 | JoystickView
459 | QWidget
460 | rqt_virtual_joy.joystickView
461 | 1
462 |
463 |
464 |
465 |
466 |
467 |
--------------------------------------------------------------------------------