├── .gitignore
├── COPYING
├── README.md
├── examples
├── pen_plotter.jpg
└── test.png
├── rastercarve
├── __init__.py
└── __main__.py
└── setup.py
/.gitignore:
--------------------------------------------------------------------------------
1 | # Byte-compiled / optimized / DLL files
2 | __pycache__/
3 | *.py[cod]
4 | *$py.class
5 |
6 | # C extensions
7 | *.so
8 |
9 | # Distribution / packaging
10 | .Python
11 | build/
12 | develop-eggs/
13 | dist/
14 | downloads/
15 | eggs/
16 | .eggs/
17 | lib/
18 | lib64/
19 | parts/
20 | sdist/
21 | var/
22 | wheels/
23 | pip-wheel-metadata/
24 | share/python-wheels/
25 | *.egg-info/
26 | .installed.cfg
27 | *.egg
28 | MANIFEST
29 |
30 | # PyInstaller
31 | # Usually these files are written by a python script from a template
32 | # before PyInstaller builds the exe, so as to inject date/other infos into it.
33 | *.manifest
34 | *.spec
35 |
36 | # Installer logs
37 | pip-log.txt
38 | pip-delete-this-directory.txt
39 |
40 | # Unit test / coverage reports
41 | htmlcov/
42 | .tox/
43 | .nox/
44 | .coverage
45 | .coverage.*
46 | .cache
47 | nosetests.xml
48 | coverage.xml
49 | *.cover
50 | *.py,cover
51 | .hypothesis/
52 | .pytest_cache/
53 |
54 | # Translations
55 | *.mo
56 | *.pot
57 |
58 | # Django stuff:
59 | *.log
60 | local_settings.py
61 | db.sqlite3
62 | db.sqlite3-journal
63 |
64 | # Flask stuff:
65 | instance/
66 | .webassets-cache
67 |
68 | # Scrapy stuff:
69 | .scrapy
70 |
71 | # Sphinx documentation
72 | docs/_build/
73 |
74 | # PyBuilder
75 | target/
76 |
77 | # Jupyter Notebook
78 | .ipynb_checkpoints
79 |
80 | # IPython
81 | profile_default/
82 | ipython_config.py
83 |
84 | # pyenv
85 | .python-version
86 |
87 | # pipenv
88 | # According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control.
89 | # However, in case of collaboration, if having platform-specific dependencies or dependencies
90 | # having no cross-platform support, pipenv may install dependencies that don't work, or not
91 | # install all needed dependencies.
92 | #Pipfile.lock
93 |
94 | # PEP 582; used by e.g. github.com/David-OConnor/pyflow
95 | __pypackages__/
96 |
97 | # Celery stuff
98 | celerybeat-schedule
99 | celerybeat.pid
100 |
101 | # SageMath parsed files
102 | *.sage.py
103 |
104 | # Environments
105 | .env
106 | .venv
107 | env/
108 | venv/
109 | ENV/
110 | env.bak/
111 | venv.bak/
112 |
113 | # Spyder project settings
114 | .spyderproject
115 | .spyproject
116 |
117 | # Rope project settings
118 | .ropeproject
119 |
120 | # mkdocs documentation
121 | /site
122 |
123 | # mypy
124 | .mypy_cache/
125 | .dmypy.json
126 | dmypy.json
127 |
128 | # Pyre type checker
129 | .pyre/
130 |
--------------------------------------------------------------------------------
/COPYING:
--------------------------------------------------------------------------------
1 | GNU GENERAL PUBLIC LICENSE
2 | Version 2, June 1991
3 |
4 | Copyright (C) 1989, 1991 Free Software Foundation, Inc.
5 | 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA
6 | Everyone is permitted to copy and distribute verbatim copies
7 | of this license document, but changing it is not allowed.
8 |
9 | Preamble
10 |
11 | The licenses for most software are designed to take away your
12 | freedom to share and change it. By contrast, the GNU General Public
13 | License is intended to guarantee your freedom to share and change free
14 | software--to make sure the software is free for all its users. This
15 | General Public License applies to most of the Free Software
16 | Foundation's software and to any other program whose authors commit to
17 | using it. (Some other Free Software Foundation software is covered by
18 | the GNU Library General Public License instead.) You can apply it to
19 | your programs, too.
20 |
21 | When we speak of free software, we are referring to freedom, not
22 | price. Our General Public Licenses are designed to make sure that you
23 | have the freedom to distribute copies of free software (and charge for
24 | this service if you wish), that you receive source code or can get it
25 | if you want it, that you can change the software or use pieces of it
26 | in new free programs; and that you know you can do these things.
27 |
28 | To protect your rights, we need to make restrictions that forbid
29 | anyone to deny you these rights or to ask you to surrender the rights.
30 | These restrictions translate to certain responsibilities for you if you
31 | distribute copies of the software, or if you modify it.
32 |
33 | For example, if you distribute copies of such a program, whether
34 | gratis or for a fee, you must give the recipients all the rights that
35 | you have. You must make sure that they, too, receive or can get the
36 | source code. And you must show them these terms so they know their
37 | rights.
38 |
39 | We protect your rights with two steps: (1) copyright the software, and
40 | (2) offer you this license which gives you legal permission to copy,
41 | distribute and/or modify the software.
42 |
43 | Also, for each author's protection and ours, we want to make certain
44 | that everyone understands that there is no warranty for this free
45 | software. If the software is modified by someone else and passed on, we
46 | want its recipients to know that what they have is not the original, so
47 | that any problems introduced by others will not reflect on the original
48 | authors' reputations.
49 |
50 | Finally, any free program is threatened constantly by software
51 | patents. We wish to avoid the danger that redistributors of a free
52 | program will individually obtain patent licenses, in effect making the
53 | program proprietary. To prevent this, we have made it clear that any
54 | patent must be licensed for everyone's free use or not licensed at all.
55 |
56 | The precise terms and conditions for copying, distribution and
57 | modification follow.
58 | �
59 | GNU GENERAL PUBLIC LICENSE
60 | TERMS AND CONDITIONS FOR COPYING, DISTRIBUTION AND MODIFICATION
61 |
62 | 0. This License applies to any program or other work which contains
63 | a notice placed by the copyright holder saying it may be distributed
64 | under the terms of this General Public License. The "Program", below,
65 | refers to any such program or work, and a "work based on the Program"
66 | means either the Program or any derivative work under copyright law:
67 | that is to say, a work containing the Program or a portion of it,
68 | either verbatim or with modifications and/or translated into another
69 | language. (Hereinafter, translation is included without limitation in
70 | the term "modification".) Each licensee is addressed as "you".
71 |
72 | Activities other than copying, distribution and modification are not
73 | covered by this License; they are outside its scope. The act of
74 | running the Program is not restricted, and the output from the Program
75 | is covered only if its contents constitute a work based on the
76 | Program (independent of having been made by running the Program).
77 | Whether that is true depends on what the Program does.
78 |
79 | 1. You may copy and distribute verbatim copies of the Program's
80 | source code as you receive it, in any medium, provided that you
81 | conspicuously and appropriately publish on each copy an appropriate
82 | copyright notice and disclaimer of warranty; keep intact all the
83 | notices that refer to this License and to the absence of any warranty;
84 | and give any other recipients of the Program a copy of this License
85 | along with the Program.
86 |
87 | You may charge a fee for the physical act of transferring a copy, and
88 | you may at your option offer warranty protection in exchange for a fee.
89 |
90 | 2. You may modify your copy or copies of the Program or any portion
91 | of it, thus forming a work based on the Program, and copy and
92 | distribute such modifications or work under the terms of Section 1
93 | above, provided that you also meet all of these conditions:
94 |
95 | a) You must cause the modified files to carry prominent notices
96 | stating that you changed the files and the date of any change.
97 |
98 | b) You must cause any work that you distribute or publish, that in
99 | whole or in part contains or is derived from the Program or any
100 | part thereof, to be licensed as a whole at no charge to all third
101 | parties under the terms of this License.
102 |
103 | c) If the modified program normally reads commands interactively
104 | when run, you must cause it, when started running for such
105 | interactive use in the most ordinary way, to print or display an
106 | announcement including an appropriate copyright notice and a
107 | notice that there is no warranty (or else, saying that you provide
108 | a warranty) and that users may redistribute the program under
109 | these conditions, and telling the user how to view a copy of this
110 | License. (Exception: if the Program itself is interactive but
111 | does not normally print such an announcement, your work based on
112 | the Program is not required to print an announcement.)
113 | �
114 | These requirements apply to the modified work as a whole. If
115 | identifiable sections of that work are not derived from the Program,
116 | and can be reasonably considered independent and separate works in
117 | themselves, then this License, and its terms, do not apply to those
118 | sections when you distribute them as separate works. But when you
119 | distribute the same sections as part of a whole which is a work based
120 | on the Program, the distribution of the whole must be on the terms of
121 | this License, whose permissions for other licensees extend to the
122 | entire whole, and thus to each and every part regardless of who wrote it.
123 |
124 | Thus, it is not the intent of this section to claim rights or contest
125 | your rights to work written entirely by you; rather, the intent is to
126 | exercise the right to control the distribution of derivative or
127 | collective works based on the Program.
128 |
129 | In addition, mere aggregation of another work not based on the Program
130 | with the Program (or with a work based on the Program) on a volume of
131 | a storage or distribution medium does not bring the other work under
132 | the scope of this License.
133 |
134 | 3. You may copy and distribute the Program (or a work based on it,
135 | under Section 2) in object code or executable form under the terms of
136 | Sections 1 and 2 above provided that you also do one of the following:
137 |
138 | a) Accompany it with the complete corresponding machine-readable
139 | source code, which must be distributed under the terms of Sections
140 | 1 and 2 above on a medium customarily used for software interchange; or,
141 |
142 | b) Accompany it with a written offer, valid for at least three
143 | years, to give any third party, for a charge no more than your
144 | cost of physically performing source distribution, a complete
145 | machine-readable copy of the corresponding source code, to be
146 | distributed under the terms of Sections 1 and 2 above on a medium
147 | customarily used for software interchange; or,
148 |
149 | c) Accompany it with the information you received as to the offer
150 | to distribute corresponding source code. (This alternative is
151 | allowed only for noncommercial distribution and only if you
152 | received the program in object code or executable form with such
153 | an offer, in accord with Subsection b above.)
154 |
155 | The source code for a work means the preferred form of the work for
156 | making modifications to it. For an executable work, complete source
157 | code means all the source code for all modules it contains, plus any
158 | associated interface definition files, plus the scripts used to
159 | control compilation and installation of the executable. However, as a
160 | special exception, the source code distributed need not include
161 | anything that is normally distributed (in either source or binary
162 | form) with the major components (compiler, kernel, and so on) of the
163 | operating system on which the executable runs, unless that component
164 | itself accompanies the executable.
165 |
166 | If distribution of executable or object code is made by offering
167 | access to copy from a designated place, then offering equivalent
168 | access to copy the source code from the same place counts as
169 | distribution of the source code, even though third parties are not
170 | compelled to copy the source along with the object code.
171 | �
172 | 4. You may not copy, modify, sublicense, or distribute the Program
173 | except as expressly provided under this License. Any attempt
174 | otherwise to copy, modify, sublicense or distribute the Program is
175 | void, and will automatically terminate your rights under this License.
176 | However, parties who have received copies, or rights, from you under
177 | this License will not have their licenses terminated so long as such
178 | parties remain in full compliance.
179 |
180 | 5. You are not required to accept this License, since you have not
181 | signed it. However, nothing else grants you permission to modify or
182 | distribute the Program or its derivative works. These actions are
183 | prohibited by law if you do not accept this License. Therefore, by
184 | modifying or distributing the Program (or any work based on the
185 | Program), you indicate your acceptance of this License to do so, and
186 | all its terms and conditions for copying, distributing or modifying
187 | the Program or works based on it.
188 |
189 | 6. Each time you redistribute the Program (or any work based on the
190 | Program), the recipient automatically receives a license from the
191 | original licensor to copy, distribute or modify the Program subject to
192 | these terms and conditions. You may not impose any further
193 | restrictions on the recipients' exercise of the rights granted herein.
194 | You are not responsible for enforcing compliance by third parties to
195 | this License.
196 |
197 | 7. If, as a consequence of a court judgment or allegation of patent
198 | infringement or for any other reason (not limited to patent issues),
199 | conditions are imposed on you (whether by court order, agreement or
200 | otherwise) that contradict the conditions of this License, they do not
201 | excuse you from the conditions of this License. If you cannot
202 | distribute so as to satisfy simultaneously your obligations under this
203 | License and any other pertinent obligations, then as a consequence you
204 | may not distribute the Program at all. For example, if a patent
205 | license would not permit royalty-free redistribution of the Program by
206 | all those who receive copies directly or indirectly through you, then
207 | the only way you could satisfy both it and this License would be to
208 | refrain entirely from distribution of the Program.
209 |
210 | If any portion of this section is held invalid or unenforceable under
211 | any particular circumstance, the balance of the section is intended to
212 | apply and the section as a whole is intended to apply in other
213 | circumstances.
214 |
215 | It is not the purpose of this section to induce you to infringe any
216 | patents or other property right claims or to contest validity of any
217 | such claims; this section has the sole purpose of protecting the
218 | integrity of the free software distribution system, which is
219 | implemented by public license practices. Many people have made
220 | generous contributions to the wide range of software distributed
221 | through that system in reliance on consistent application of that
222 | system; it is up to the author/donor to decide if he or she is willing
223 | to distribute software through any other system and a licensee cannot
224 | impose that choice.
225 |
226 | This section is intended to make thoroughly clear what is believed to
227 | be a consequence of the rest of this License.
228 | �
229 | 8. If the distribution and/or use of the Program is restricted in
230 | certain countries either by patents or by copyrighted interfaces, the
231 | original copyright holder who places the Program under this License
232 | may add an explicit geographical distribution limitation excluding
233 | those countries, so that distribution is permitted only in or among
234 | countries not thus excluded. In such case, this License incorporates
235 | the limitation as if written in the body of this License.
236 |
237 | 9. The Free Software Foundation may publish revised and/or new versions
238 | of the General Public License from time to time. Such new versions will
239 | be similar in spirit to the present version, but may differ in detail to
240 | address new problems or concerns.
241 |
242 | Each version is given a distinguishing version number. If the Program
243 | specifies a version number of this License which applies to it and "any
244 | later version", you have the option of following the terms and conditions
245 | either of that version or of any later version published by the Free
246 | Software Foundation. If the Program does not specify a version number of
247 | this License, you may choose any version ever published by the Free Software
248 | Foundation.
249 |
250 | 10. If you wish to incorporate parts of the Program into other free
251 | programs whose distribution conditions are different, write to the author
252 | to ask for permission. For software which is copyrighted by the Free
253 | Software Foundation, write to the Free Software Foundation; we sometimes
254 | make exceptions for this. Our decision will be guided by the two goals
255 | of preserving the free status of all derivatives of our free software and
256 | of promoting the sharing and reuse of software generally.
257 |
258 | NO WARRANTY
259 |
260 | 11. BECAUSE THE PROGRAM IS LICENSED FREE OF CHARGE, THERE IS NO WARRANTY
261 | FOR THE PROGRAM, TO THE EXTENT PERMITTED BY APPLICABLE LAW. EXCEPT WHEN
262 | OTHERWISE STATED IN WRITING THE COPYRIGHT HOLDERS AND/OR OTHER PARTIES
263 | PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED
264 | OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
265 | MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE RISK AS
266 | TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD THE
267 | PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY SERVICING,
268 | REPAIR OR CORRECTION.
269 |
270 | 12. IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
271 | WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MAY MODIFY AND/OR
272 | REDISTRIBUTE THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES,
273 | INCLUDING ANY GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING
274 | OUT OF THE USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED
275 | TO LOSS OF DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY
276 | YOU OR THIRD PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER
277 | PROGRAMS), EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE
278 | POSSIBILITY OF SUCH DAMAGES.
279 |
280 | END OF TERMS AND CONDITIONS
281 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # RasterCarve
2 |
3 | [](https://badge.fury.io/py/rastercarve) [](https://pypi.python.org/pypi/rastercarve/) [](https://pypi.python.org/pypi/rastercarve/)
4 |
5 | This is a little Python script I wrote to generate G-code toolpaths to
6 | engrave raster images.
7 |
8 | A hosted version of the script is available at
9 | https://rastercarve.live
10 | ([Github](https://github.com/built1n/rastercarve-live)). There is also
11 | a standalone custom G-code previewer available at
12 | https://github.com/built1n/rastercarve-preview.
13 |
14 | It takes bitmap images and produces commands (G-code) for a CNC
15 | machine to engrave that image onto a piece of material. For the
16 | uninitiated, a CNC machine is essentially a robotic carving machine --
17 | think *robot drill*: you 1) put in a piece of wood/foam/aluminum
18 | stock; 2) program the machine; and 3) out comes a finished piece with
19 | the right patterns cut into it.
20 |
21 | This program comes in during step 2 -- it takes an image and outputs
22 | the right sequence of commands for your machine to engrave it. This is
23 | not the first program that can do this, but existing solutions are
24 | unsuitable due to their high cost.
25 |
26 | The program's output has been thoroughly tested on a ShopBot Desktop
27 | MAX, which produced the results shown below, and a ShopBot PRTalpha.
28 | Various users have reported successful results on X-Carve and Shapeoko
29 | machines, among others.
30 |
31 | 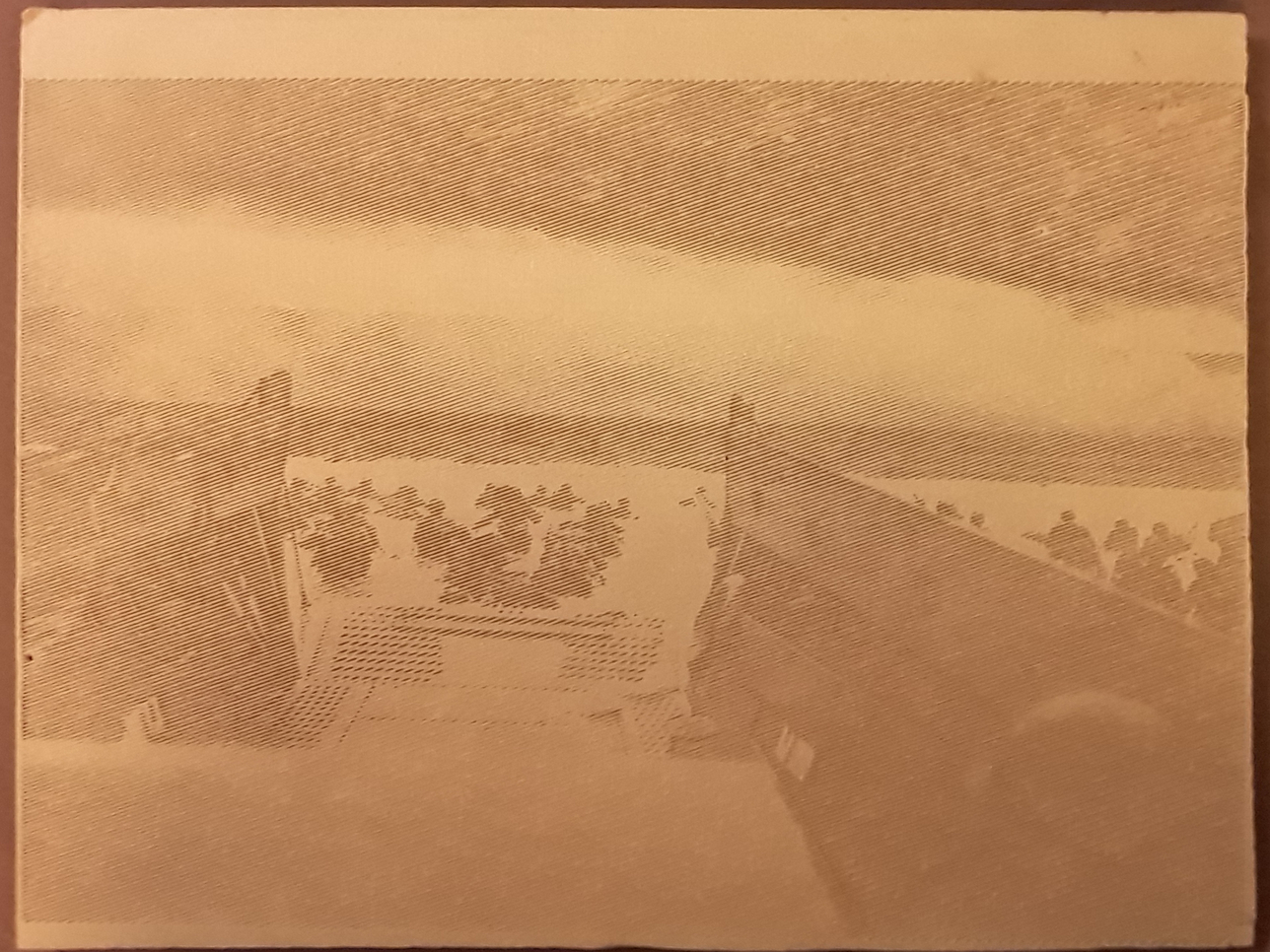 32 |
32 |  33 |
33 |  34 |
35 | # Installation
36 |
37 | `$ pip install rastercarve`
38 |
39 | Running straight from the source tree works fine, too:
40 |
41 | `$ python -m rastercarve -h`
42 |
43 | # Usage
44 |
45 | ```
46 | $ rastercarve --width 10 examples/test.png > out.nc
47 | Generating G-code: 100%|██████████████████| 278/278 [00:04<00:00, 57.10 lines/s]
48 | === Statistics ===
49 | Input resolution: 512x512 px
50 | Output dimensions: 10.00" wide by 10.00" tall = 100.0 in^2
51 | Max line depth: 0.080 in
52 | Max line width: 0.043 in (30.0 deg V-bit)
53 | Line spacing: 0.047 in (110% stepover)
54 | Line angle: 22.5 deg
55 | Number of lines: 277
56 | Input resolution: 51.2 PPI
57 | Output resolution: 100.0 PPI
58 | Scaled image by f=3.91 (200.0 PPI)
59 | Total toolpath length: 2202.6 in
60 | - Rapids: 34.6 in (8.6 s)
61 | - Plunges: 29.8 in (59.6 s)
62 | - Moves: 2138.2 in (1282.9 s)
63 | Feed rate: 100.0 in/min
64 | Plunge rate: 30.0 in/min
65 | Estimated machining time: 1351.2 sec
66 | 1 suppressed debug message(s).
67 | ```
68 |
69 | This command generates G-code to engrave `examples/test.png` into an
70 | piece of material 10 inches wide. Exactly one of the `--width` or
71 | `--height` parameters must be specified on the command line; the other
72 | will be calculated automatically.
73 |
74 | The engraving parameters can be safely left at their defaults, though
75 | fine-tuning is possible depending on material and machine
76 | characteristics.
77 |
78 | The output G-code will be piped to `out.nc`, which any CNC machine
79 | should accept as input.
80 |
81 | # Machining Process
82 |
83 | With the toolpath generated, it is time to run the job. Presumably you
84 | know the specifics of your particular machine, so I'll only outline
85 | the high-level steps here:
86 |
87 | 1. Load the right tool. An engraving bit is best, though ordinary
88 | V-bits give acceptable results. Make sure that the tool angle matches
89 | that used to generate the toolpath (30 degrees is the default --
90 | change this if needed).
91 |
92 | 2. Load the material. MDF seems to work best; plywood and ordinary
93 | lumber are too prone to chipping. Plastics have a tendency to melt and
94 | stick to the bit.
95 |
96 | 3. Zero X and Y axes at the top left corner of the eventual image
97 | location. Double check that the bottom right corner is in bounds.
98 |
99 | 4. Zero the Z axis to the top surface of the material.
100 |
101 | 5. Load and run the toolpath. The engraving will begin in the top
102 | right corner and work its way down to the bottom right in a serpentine
103 | fashion.
104 |
105 | ## Ramping
106 |
107 | Some tools (e.g. ShopBot) have an option to control acceleration ramping
108 | speeds. The intricate nature of many raster engraving toolpaths generated
109 | with this program tend to trigger unneccessary speed ramping on these
110 | machines, leading to very slow cycle times. The solution to this is to
111 | set more aggressive ramping values. (ShopBot users can use [VR].)
112 |
113 | # Advanced
114 |
115 | ```
116 | usage: rastercarve [-h] (--width WIDTH | --height HEIGHT) [-f FEED_RATE]
117 | [-p PLUNGE_RATE] [--rapid RAPID_RATE] [-z SAFE_Z]
118 | [--end-z TRAVERSE_Z] [-t TOOL_ANGLE] [-d MAX_DEPTH]
119 | [-a LINE_ANGLE] [-s STEPOVER] [-r LINEAR_RESOLUTION]
120 | [--dots] [--no-line-numbers]
121 | [--preamble PREAMBLE | --preamble-file PREAMBLE_FILE]
122 | [--epilogue EPILOGUE | --epilogue-file EPILOGUE_FILE]
123 | [--json JSON_DEST] [--debug] [-q] [--version]
124 | filename
125 |
126 | Generate G-code to engrave raster images.
127 |
128 | positional arguments:
129 | filename input image (any OpenCV-supported format)
130 |
131 | optional arguments:
132 | -h, --help show this help message and exit
133 | --json JSON_DEST dump statistics in JSON format
134 | --debug print debug messages
135 | -q disable progress and statistics
136 | --version show program's version number and exit
137 |
138 | output dimensions:
139 | Exactly one required. Image will be scaled while maintaining aspect ratio.
140 |
141 | --width WIDTH output width (in)
142 | --height HEIGHT output height (in)
143 |
144 | machine configuration:
145 | -f FEED_RATE engraving feed rate (in/min) (default: 100)
146 | -p PLUNGE_RATE engraving plunge rate (in/min) (default: 30)
147 | --rapid RAPID_RATE rapid traverse rate (for time estimation only)
148 | (default: 240)
149 | -z SAFE_Z rapid traverse height (in) (default: 0.1)
150 | --end-z TRAVERSE_Z Z height of final traverse (in) (default: 2)
151 | -t TOOL_ANGLE included angle of tool (deg) (default: 30)
152 |
153 | engraving parameters:
154 | -d MAX_DEPTH maximum engraving depth (in) (default: 0.08)
155 | -a LINE_ANGLE angle of grooves from horizontal (deg) (default: 22.5)
156 | -s STEPOVER stepover percentage (affects spacing between lines)
157 | (default: 110)
158 | -r LINEAR_RESOLUTION distance between successive G-code points (in)
159 | (default: 0.01)
160 | --dots engrave using dots instead of lines (experimental)
161 |
162 | G-code parameters:
163 | --no-line-numbers suppress G-code line numbers (dangerous on ShopBot!)
164 | --preamble PREAMBLE override the default G-code preamble; to specify
165 | multiple lines on the command line, use $'' strings
166 | with \n; each line of the preamble will be prepended
167 | with a line number, except when used with --no-line-
168 | numbers
169 | --preamble-file PREAMBLE_FILE
170 | like --preamble, but read from a file
171 | --epilogue EPILOGUE override the default G-code epilogue; see above notes
172 | for --preamble
173 | --epilogue-file EPILOGUE_FILE
174 | like --epilogue, but read from a file
175 |
176 | The default feeds have been found to be safe values for medium-density
177 | fiberboard (MDF). Experimenting with the STEPOVER, LINE_ANGLE, and
178 | LINEAR_RESOLUTION may yield improvements in engraving quality at the cost of
179 | increased machining time. On ShopBot machines, the --no-line-numbers flag must
180 | not be used, since the spindle will fail to start and damage the material. Use
181 | this flag with caution on other machines.
182 | ```
183 |
184 | ## G-code Customization
185 |
186 | The G-code produced should work out-of-the-box on ShopBot machines. Other
187 | machines may need some fine-tuning.
188 |
189 | ### Preamble
190 |
191 | The default G-code preamble is
192 |
193 | ```
194 | G00 G20
195 | M03
196 | ```
197 |
198 | This tells the machine to use inch units (`G20`) and then starts the
199 | spindle (`M03`).
200 |
201 | The default G-code epilogue is
202 |
203 | ```
204 | M05
205 | ```
206 |
207 | This does nothing but stop the spindle.
208 |
209 | The `--preamble[-file]` and `--epilogue[-file]` options allow you to specify
210 | a custom G-code header or footer to override the default. Note that in writing
211 | a custom preamble/epilogue, you should *not* include line numbers; the program
212 | will automatically insert them on each line of the supplied preamble/epilogue.
213 |
214 | ## Metric Units
215 |
216 | Passing the `--metric` flag will replace the default `G20` directive with `G21`
217 | to force metric units. If this is passed, all measurements given will be
218 | interpreted as millimeters. E.g., `--width 100` will be interpreted as a width
219 | of 100mm. (That is to say, the `--metric` flag is comparatively dumb; no
220 | internal unit scaling takes place -- only the preamble is changed.)
221 |
222 | Note that the `--metric` flag cannot be used in conjunction with
223 | `--preamble[-file]`. If a custom preamble is necessary with metric
224 | units, just include `G21` in the custom preamble.
225 |
226 | ## Pen Plotting
227 |
228 | The generated toolpaths produce excellent results when used with pen plotters
229 | instead of engraving bits (see above). The machine setup is a little more
230 | complicated, though: the Z height must be set to half the maximum engraving
231 | depth *above* the material for the black and white regions to be drawn
232 | correctly.
233 |
234 | # Related
235 |
236 | [Vectric PhotoVCarve](https://www.vectric.com/products/photovcarve) -
237 | a similar commercial solution. This program is not derived from
238 | PhotoVCarve.
239 |
240 | [My blog post](https://www.fwei.tk/blog/opening-black-boxes.html) -
241 | writeup on the development process.
242 |
--------------------------------------------------------------------------------
/examples/pen_plotter.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/built1n/rastercarve/e614cf1072363c37a6b678af9ac6dc5677f9919a/examples/pen_plotter.jpg
--------------------------------------------------------------------------------
/examples/test.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/built1n/rastercarve/e614cf1072363c37a6b678af9ac6dc5677f9919a/examples/test.png
--------------------------------------------------------------------------------
/rastercarve/__init__.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | # -*- coding: utf-8 -*-
3 |
4 | # RasterCarve
5 | #
6 | # Copyright (C) 2019-2020 Franklin Wei
7 | #
8 | # This program is free software; you can redistribute it and/or
9 | # modify it under the terms of the GNU General Public License
10 | # as published by the Free Software Foundation; either version 2
11 | # of the License, or (at your option) any later version.
12 | #
13 | # This software is distributed on an "AS IS" basis, WITHOUT WARRANTY OF ANY
14 | # KIND, either express or implied.
15 |
16 | __version__ = '1.0.8'
17 |
--------------------------------------------------------------------------------
/rastercarve/__main__.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | # -*- coding: utf-8 -*-
3 |
4 | # RasterCarve
5 | #
6 | # Copyright (C) 2019-2020 Franklin Wei
7 | #
8 | # This program is free software; you can redistribute it and/or
9 | # modify it under the terms of the GNU General Public License
10 | # as published by the Free Software Foundation; either version 2
11 | # of the License, or (at your option) any later version.
12 | #
13 | # This software is distributed on an "AS IS" basis, WITHOUT WARRANTY OF ANY
14 | # KIND, either express or implied.
15 |
16 | import math
17 | import sys
18 |
19 | from rastercarve import __version__
20 |
21 | import argparse
22 | import cv2 # image scaling
23 | import io # stringIO for parsing lines
24 | import json
25 | import numpy as np # a little vector stuff
26 | from tqdm import tqdm # progress bar
27 |
28 | glob_args = None
29 |
30 | ##### Default parameters
31 | #### Machine configuration
32 | DEF_FEED_RATE = 100 # in / min
33 | DEF_PLUNGE_RATE = 30 # in / min
34 | DEF_RAPID_RATE = 240 # in / min (used only for time estimation)
35 | DEF_SAFE_Z = .1 # tool will start/end this high from material
36 | DEF_TRAVERSE_Z = 2 # ending height (in)
37 | DEF_MAX_DEPTH = .080 # full black is this many inches deep
38 | DEF_TOOL_ANGLE = 30 # included angle of tool (we assume a V-bit). change if needed
39 |
40 | #### Cutting parameters
41 | DEF_STEPOVER = 110
42 | DEF_LINE_ANGLE = 22.5 # angle of lines across image, [0-90) degrees
43 | DEF_LINEAR_RESOLUTION = .01 # spacing between image samples along a line (inches)
44 |
45 | #### G-code parameters
46 | DEF_PREAMBLE = "G00 G20\nM03"
47 | DEF_PREAMBLE_METRIC = "G00 G21\nM03"
48 | DEF_EPILOGUE = "M05"
49 |
50 | #### Image interpolation
51 | SUPERSAMPLE = 2 # scale heightmap by this factor before cutting
52 |
53 | #### Internal stuff - don't mess with this
54 | DEG2RAD = math.pi / 180
55 |
56 | # Unit names
57 | UNIT_LONG = "in"
58 | UNIT_SHORT = "\""
59 | MM_LONG = MM_SHORT = "mm"
60 |
61 | #### Parameter constraints
62 | CONSTRAINTS = [
63 | '0 <= glob_args.line_angle < 90',
64 | '0 < glob_args.tool_angle < 180',
65 | '0 < glob_args.feed_rate',
66 | '0 < glob_args.plunge_rate',
67 | '0 < glob_args.safe_z',
68 | '0 < glob_args.traverse_z',
69 | '0 < glob_args.max_depth',
70 | '100 <= glob_args.stepover',
71 | '0 < glob_args.linear_resolution',
72 | '(hasattr(glob_args, "height") and glob_args.height > 0) or (hasattr(glob_args, "width") and glob_args.width > 0)',
73 | 'not (hasattr(glob_args, "metric") and (hasattr(glob_args, "preamble") or hasattr(glob_args, "preamble_file")))'
74 | ]
75 |
76 | # floating-point range
77 | def frange(x, y, jump):
78 | while x < y:
79 | yield x
80 | x += jump
81 |
82 | def eprint(s):
83 | if not hasattr(glob_args, 'quiet'):
84 | print(s, file=sys.stderr)
85 |
86 | debug_msgs = 0
87 | def debug(str):
88 | global debug_msgs
89 | if hasattr(glob_args, 'debug'):
90 | eprint(str)
91 | debug_msgs += 1
92 |
93 | line_no = 1
94 | def gcode(s):
95 | global line_no
96 | print((s if hasattr(glob_args, 'suppress_linenos') else "N%d %s" % (line_no, s)) )
97 | line_no += 1
98 |
99 | def gcode_multiline(s):
100 | f = io.StringIO(s)
101 | for l in f:
102 | gcode(l.rstrip())
103 |
104 |
105 | pathlen = 0 # in
106 | rapidlen = 0 # in
107 | plungelen = 0 # in
108 | movelen = 0 # in
109 | pathtime = 0 # sec
110 | lastpos = None
111 |
112 | # movetype: 1 = feed, 2 = rapid, 3 = plunge
113 | def updatePos(pos, feedrate, movetype):
114 | global pathlen, rapidlen, plungelen, movelen, lastpos, pathtime
115 | if lastpos is None:
116 | lastpos = pos
117 | return
118 | d = np.linalg.norm(pos - lastpos)
119 | pathlen += d
120 |
121 | # account for different types of moves separately
122 | if movetype == 1:
123 | movelen += d
124 | elif movetype == 2:
125 | rapidlen += d
126 | elif movetype == 3:
127 | plungelen += d
128 |
129 | pathtime += d / (feedrate / 60)
130 | lastpos = pos
131 |
132 | # reflect as needed
133 | def transform(x, y):
134 | return x, -y
135 |
136 | # we will negate the Y axis in all these
137 | def move(x, y, z, f):
138 | x, y = transform(x, y)
139 | gcode("G1 F%d X%f Y%f Z%f" % (f, x, y, z))
140 | updatePos(np.array([x, y, z]), f, 1)
141 |
142 | def moveRapid(x, y, z):
143 | x, y = transform(x, y)
144 | gcode("G0 X%f Y%f Z%f" % (x, y, z))
145 | updatePos(np.array([x, y, z]), glob_args.rapid_rate, 2)
146 |
147 | def moveSlow(x, y, z):
148 | x, y = transform(x, y)
149 | f = glob_args.plunge_rate
150 | gcode("G1 F%d X%f Y%f Z%f" % (f, x, y, z))
151 | updatePos(np.array([x, y, z]), f, 3)
152 |
153 | def moveRapidXY(x, y):
154 | x, y = transform(x, y)
155 | gcode("G0 X%f Y%f" % (x, y))
156 | updatePos(np.array([x, y, lastpos[2]]), glob_args.rapid_rate, 2)
157 |
158 | def moveZ(z, f):
159 | gcode("G1 F%d Z%f" % (f, z))
160 | newpos = lastpos
161 | newpos[2] = z
162 | updatePos(newpos, f, 2)
163 |
164 | def getPix(image, x, y):
165 | # clamp
166 | x = max(0, min(int(x), image.shape[1]-1))
167 | y = max(0, min(int(y), image.shape[0]-1))
168 |
169 | return image[y, x]
170 |
171 | # return how deep to cut given a pixel value
172 | def getDepth(pix):
173 | # may want to do gamma mapping
174 | return -float(pix) / 256 * glob_args.max_depth
175 |
176 | def inBounds(img_size, x):
177 | return 0 <= x[0] and x[0] <= img_size[0] and 0 <= x[1] and x[1] <= img_size[1]
178 |
179 | # Engrave one line across the image. start and d are vectors in the
180 | # output space representing the start point and direction of
181 | # machining, respectively. start should be on the border of the image,
182 | # and d should point INTO the image.
183 | def engraveLine(img_interp, img_size, ppi, start, d, step):
184 | v = start
185 | d = d / np.linalg.norm(d)
186 |
187 | # disabled -FW
188 | # if not inBounds(img_size, v):
189 | # debug("Refusing to engrave out of bounds. (Possible programming error, you idiot!): %s, %s" % (v, img_size))
190 | # return start
191 |
192 | moveZ(glob_args.safe_z, glob_args.plunge_rate)
193 | moveRapidXY(v[0], v[1])
194 |
195 | first = True
196 | quitNext = False
197 | while True:
198 | img_x = int(round(v[0] * ppi))
199 | img_y = int(round(v[1] * ppi))
200 | x, y = v
201 | depth = getDepth(getPix(img_interp, img_x, img_y))
202 | if not first:
203 | if hasattr(glob_args, 'pointmode'):
204 | move(x, y, glob_args.safe_z, glob_args.feed_rate)
205 | move(x, y, depth, glob_args.feed_rate)
206 | move(x, y, glob_args.safe_z, glob_args.feed_rate)
207 | else:
208 | move(x, y, depth, glob_args.feed_rate)
209 | else:
210 | first = False
211 | moveSlow(x, y, depth)
212 | if hasattr(glob_args, 'pointmode'):
213 | moveSlow(x, y, glob_args.safe_z)
214 |
215 | if quitNext:
216 | return v
217 | v += step * d
218 |
219 | # engrave to the edge
220 | if not inBounds(img_size, v):
221 | v -= step * d
222 | c = ((img_size[0] - v[0]) / d[0]) if (d[0] > 0 and d[1] == 0) else \
223 | min(-v[1] / d[1], (img_size[0] - v[0]) / d[0]) if (d[0] > 0 and d[1] != 0) else \
224 | min(-v[0] / d[0], (img_size[1] - v[1]) / d[1])
225 | v += c * d
226 |
227 | quitNext = True
228 |
229 | # return last engraved point
230 | return v
231 |
232 | def checkCondition(cond):
233 | success = eval(cond)
234 | if not success:
235 | eprint("ERROR: Invalid parameter: %s" % cond)
236 | return success
237 |
238 | def dump_stats(orig_size, img_size, line_width, line_spacing,
239 | nlines, img_ppi, output_ppi, scale_factor, interp_ppi, pathlen,
240 | rapidlen, plungelen, movelen, pathtime):
241 | eprint("=== Statistics ===")
242 | eprint(f"Input resolution: %dx%d px" % (orig_size[0], orig_size[1]))
243 | eprint(f"Output dimensions: %.2f{UNIT_SHORT} wide by %.2f{UNIT_SHORT} tall = %.1f {UNIT_LONG}^2" % (img_size[0], img_size[1], img_size[0] * img_size[1]))
244 | eprint(f"Max line depth: %.3f {UNIT_LONG}" % (glob_args.max_depth))
245 | eprint(f"Max line width: %.3f {UNIT_LONG} (%.1f deg V-bit)" % (line_width, glob_args.tool_angle))
246 | eprint(f"Line spacing: %.3f {UNIT_LONG} (%d%% stepover)" % (line_spacing, int(round(glob_args.stepover))))
247 | eprint(f"Line angle: %.1f deg" % (glob_args.line_angle))
248 | eprint(f"Number of lines: %d" % (nlines))
249 | eprint(f"Input resolution: %.1f PPI" % (img_ppi))
250 | eprint(f"Output resolution: %.1f PPI" % (output_ppi))
251 | eprint(f"Scaled image by f=%.2f (%.1f PPI)" % (scale_factor, interp_ppi))
252 | eprint(f"Total toolpath length: %.1f {UNIT_LONG}" % (pathlen))
253 | eprint(f" - Rapids: %.1f {UNIT_LONG} (%.1f sec)" % (rapidlen, rapidlen / (glob_args.rapid_rate / 60)))
254 | eprint(f" - Plunges: %.1f {UNIT_LONG} (%.1f sec)" % (plungelen, plungelen / (glob_args.plunge_rate / 60)))
255 | eprint(f" - Moves: %.1f {UNIT_LONG} (%.1f sec)" % (movelen, movelen / (glob_args.feed_rate / 60)))
256 | eprint(f"Feed rate: %.1f {UNIT_LONG}/min" % (glob_args.feed_rate))
257 | eprint(f"Plunge rate: %.1f {UNIT_LONG}/min" % (glob_args.plunge_rate))
258 | eprint(f"Estimated machining time: %.1f sec" % (pathtime))
259 |
260 | if hasattr(glob_args, 'json_dest'):
261 | with open(glob_args.json_dest, 'w') as f:
262 | # only dump stats relevant to web frontend
263 | stats = {
264 | 'output_dimensions': {
265 | 'width': img_size[0],
266 | 'height': img_size[1]
267 | },
268 | 'line_width': line_width,
269 | 'line_spacing': line_spacing,
270 | 'nlines': int(nlines),
271 | 'img_ppi': img_ppi,
272 | 'output_ppi': output_ppi,
273 | 'interp_ppi': interp_ppi,
274 | 'pathlen': pathlen,
275 | 'pathtime': pathtime
276 | }
277 |
278 | json.dump(stats, f)
279 |
280 | def getPreambleEpilogue():
281 | global glob_args
282 | pre, epi = DEF_PREAMBLE, DEF_EPILOGUE
283 | if hasattr(glob_args, 'preamble'):
284 | pre = glob_args.preamble
285 | elif hasattr(glob_args, 'preamble_file'):
286 | with open(glob_args.preamble_file) as f:
287 | pre = f.read()
288 |
289 | if hasattr(glob_args, 'epilogue'):
290 | epi = glob_args.epilogue
291 | elif hasattr(glob_args, 'epilogue_file'):
292 | with open(glob_args.epilogue_file) as f:
293 | epi = f.read()
294 |
295 | return pre, epi
296 |
297 | def setMetric():
298 | global DEF_PREAMBLE, UNIT_LONG, UNIT_SHORT
299 | DEF_PREAMBLE = DEF_PREAMBLE_METRIC
300 | UNIT_LONG, UNIT_SHORT = MM_LONG, MM_SHORT
301 |
302 | def doEngrave():
303 | # check parameter sanity
304 | for c in CONSTRAINTS:
305 | if not checkCondition(c):
306 | eprint("Refusing to generate G-code.")
307 | return
308 |
309 | if hasattr(glob_args, 'metric'):
310 | setMetric()
311 |
312 | preamble, epilogue = getPreambleEpilogue()
313 |
314 | # invert and convert to grayscale
315 | img = ~cv2.cvtColor(cv2.imread(glob_args.filename), cv2.COLOR_BGR2GRAY)
316 |
317 | orig_h, orig_w = orig_size = img.shape[:2] # pixels
318 |
319 | img_w, img_h = img_size = (glob_args.width, glob_args.width * (orig_h / orig_w)) if hasattr(glob_args, 'width') else (glob_args.height * (orig_w / orig_h), glob_args.height) # inches
320 |
321 | img_ppi = orig_w / img_w # should be the same for X and Y directions
322 |
323 | depth2width = 2 * math.tan(glob_args.tool_angle / 2 * DEG2RAD) # multiply by this to get the width of a cut
324 | line_width = glob_args.max_depth * depth2width
325 | line_spacing = glob_args.stepover * line_width / 100.0 # orthogonal distance between lines
326 | output_ppi = 1 / glob_args.linear_resolution # linear PPI of engraved image
327 |
328 | # scale up the image with interpolation
329 | # we want the image DPI to match our engraving DPI (which is glob_args.linear_resolution)
330 | scale_factor = SUPERSAMPLE * output_ppi / img_ppi
331 | img_interp = cv2.resize(img, None, fx = scale_factor, fy = scale_factor)
332 | interp_ppi = img_ppi * scale_factor
333 |
334 | print("( Generated by rastercarve: github.com/built1n/rastercarve )")
335 | print("( Image name: %s )" % (glob_args.filename))
336 |
337 | gcode_multiline(preamble)
338 |
339 | d = np.array([math.cos(glob_args.line_angle * DEG2RAD),
340 | -math.sin(glob_args.line_angle * DEG2RAD)])
341 |
342 | max_y = img_h + img_w * -d[1] / d[0] # highest Y we'll loop to
343 | yspace = line_spacing / math.cos(glob_args.line_angle * DEG2RAD) # vertical spacing between lines
344 | xspace = line_spacing / math.sin(glob_args.line_angle * DEG2RAD) if glob_args.line_angle != 0 else 0 # horizontal space
345 |
346 | nlines = round(max_y / yspace)
347 |
348 | ### Generate toolpath
349 | moveRapid(0, 0, glob_args.safe_z)
350 | end = None
351 |
352 | for y in tqdm(frange(0, max_y - yspace, yspace * 2),
353 | total = nlines / 2,
354 | desc = 'Generating G-code',
355 | unit = ' lines',
356 | unit_scale = 2,
357 | disable = hasattr(glob_args, 'quiet')): # we engrave two lines per loop
358 | start = np.array([0, y]).astype('float64')
359 |
360 | # start some vectors on the bottom edge of the image
361 | if d[1] != 0:
362 | c = (img_h - y) / d[1] # solve (start + cd)_y = h for c
363 | if c >= 0:
364 | start += c * d
365 |
366 | start = engraveLine(img_interp, img_size, interp_ppi, start, d, glob_args.linear_resolution)
367 |
368 | # now engrave the other direction
369 | # we just need to flip d and move start over
370 |
371 | # see which side of the image the last line ran out on (either top or right side)
372 | last = start + glob_args.linear_resolution * d
373 |
374 | if last[1] < 0:
375 | start[0] += xspace
376 | else:
377 | start[1] += yspace
378 |
379 | # check if we ran out the top-right corner (this needs special treatment)
380 | if start[0] >= img_w:
381 | debug("Special case TRIGGERED")
382 | c = (start[0] - img_w) / d[0]
383 | start -= c * d
384 |
385 | end = engraveLine(img_interp, img_size, interp_ppi, start, -d, glob_args.linear_resolution)
386 |
387 | moveSlow(end[0], end[1], glob_args.traverse_z)
388 | moveRapid(0, 0, glob_args.traverse_z)
389 |
390 | gcode_multiline(epilogue)
391 |
392 | dump_stats(orig_size, img_size, line_width, line_spacing,
393 | nlines, img_ppi, output_ppi, scale_factor, interp_ppi, pathlen,
394 | rapidlen, plungelen, movelen, pathtime)
395 |
396 | if not hasattr(glob_args, 'debug') and debug_msgs > 0:
397 | eprint("%d suppressed debug message(s)." % (debug_msgs))
398 |
399 | def main():
400 | parser = argparse.ArgumentParser(prog='rastercarve',
401 | formatter_class=argparse.ArgumentDefaultsHelpFormatter,
402 | description='Generate G-code to engrave raster images.',
403 | epilog=
404 | """
405 | The default feeds have been found to be safe values for medium-density
406 | fiberboard (MDF). Experimenting with the STEPOVER, LINE_ANGLE, and
407 | LINEAR_RESOLUTION may yield improvements in engraving quality at the
408 | cost of increased machining time.
409 |
410 | On ShopBot machines, the --no-line-numbers flag must not be used,
411 | since the spindle will fail to start and damage the material. Use this
412 | flag with caution on other machines.""")
413 | parser.add_argument('filename', help='input image (any OpenCV-supported format)')
414 |
415 | dim_group = parser.add_argument_group('output dimensions', 'Exactly one required. Image will be scaled while maintaining aspect ratio.')
416 | mutex_group = dim_group.add_mutually_exclusive_group(required=True)
417 | mutex_group.add_argument('--width', help='output width (in)', action='store', dest='width', type=float, default=argparse.SUPPRESS)
418 | mutex_group.add_argument('--height', help='output height (in)', action='store', dest='height', type=float, default=argparse.SUPPRESS)
419 |
420 | mach_group = parser.add_argument_group('machine configuration')
421 | mach_group.add_argument('-f', help='engraving feed rate (in/min)', action='store', dest='feed_rate', default=DEF_FEED_RATE, type=float)
422 | mach_group.add_argument('-p', help='engraving plunge rate (in/min)', action='store', dest='plunge_rate', default=DEF_PLUNGE_RATE, type=float)
423 | mach_group.add_argument('--rapid', help='rapid traverse rate (for time estimation only)', action='store', dest='rapid_rate', default=DEF_RAPID_RATE, type=float)
424 | mach_group.add_argument('-z', help='rapid traverse height (in)', action='store', dest='safe_z', default=DEF_SAFE_Z, type=float)
425 | mach_group.add_argument('--end-z', help='Z height of final traverse (in)', action='store', dest='traverse_z', default=DEF_TRAVERSE_Z, type=float)
426 | mach_group.add_argument('-t', help='included angle of tool (deg)', action='store', dest='tool_angle', default=DEF_TOOL_ANGLE, type=float)
427 |
428 | cut_group = parser.add_argument_group('engraving parameters')
429 | cut_group.add_argument('-d', help='maximum engraving depth (in)', action='store', dest='max_depth', default=DEF_MAX_DEPTH, type=float)
430 | cut_group.add_argument('-a', help='angle of grooves from horizontal (deg)', action='store', dest='line_angle', default=DEF_LINE_ANGLE, type=float)
431 | cut_group.add_argument('-s', help='stepover percentage (affects spacing between lines)', action='store', dest='stepover', default=DEF_STEPOVER, type=float)
432 | cut_group.add_argument('-r', help='distance between successive G-code points (in)', action='store', dest='linear_resolution', default=DEF_LINEAR_RESOLUTION, type=float)
433 | cut_group.add_argument('--dots', help='engrave using dots instead of lines (experimental)', action='store_true', dest='pointmode', default=argparse.SUPPRESS)
434 |
435 |
436 | gcode_group = parser.add_argument_group('G-code parameters')
437 |
438 | gcode_group.add_argument('--metric', help='change all units to millimeters (sets G21); cannot be used with --preamble or --preamble-file', action='store_true', dest='metric', default=argparse.SUPPRESS)
439 | gcode_group.add_argument('--no-line-numbers', help='suppress G-code line numbers (dangerous on ShopBot!)', action='store_true', dest='suppress_linenos', default=argparse.SUPPRESS)
440 |
441 | preamble_group = gcode_group.add_mutually_exclusive_group(required=False)
442 | preamble_group.add_argument('--preamble', help='override the default G-code preamble; to specify multiple lines on the command line, use $\'\' strings with \\n; each line of the preamble will be prepended with a line number, except when used with --no-line-numbers', action='store', dest='preamble', default=argparse.SUPPRESS)
443 | preamble_group.add_argument('--preamble-file', help='like --preamble, but read from a file', action='store', dest='preamble_file', default=argparse.SUPPRESS)
444 |
445 | epilogue_group = gcode_group.add_mutually_exclusive_group(required=False)
446 | epilogue_group.add_argument('--epilogue', help='override the default G-code epilogue; see above notes for --preamble', action='store', dest='epilogue', default=argparse.SUPPRESS)
447 | epilogue_group.add_argument('--epilogue-file', help='like --epilogue, but read from a file', action='store', dest='epilogue_file', default=argparse.SUPPRESS)
448 |
449 | parser.add_argument('--json', help='dump statistics in JSON format', action='store', dest='json_dest', default=argparse.SUPPRESS)
450 | parser.add_argument('--debug', help='print debug messages', action='store_true', dest='debug', default=argparse.SUPPRESS)
451 | parser.add_argument('-q', help='disable progress and statistics', action='store_true', dest='quiet', default=argparse.SUPPRESS)
452 | parser.add_argument('--version', help="show program's version number and exit", action='version', version=__version__)
453 |
454 | global glob_args
455 | glob_args = parser.parse_args()
456 | debug(glob_args)
457 |
458 | doEngrave()
459 |
460 | if __name__=="__main__":
461 | main()
462 |
--------------------------------------------------------------------------------
/setup.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | import os
3 | import setuptools
4 | from rastercarve import __version__
5 |
6 | with open("README.md", "r") as fh:
7 | long_description = fh.read()
8 |
9 | setuptools.setup(
10 | name="rastercarve", # Replace with your own username
11 | version=__version__,
12 | author="Franklin Wei",
13 | author_email="franklin@rockbox.org",
14 | description="Generate G-code to engrave raster images",
15 | long_description=long_description,
16 | long_description_content_type="text/markdown",
17 | url="https://github.com/built1n/rastercarve",
18 | packages=setuptools.find_packages(),
19 | classifiers=[
20 | "Development Status :: 5 - Production/Stable",
21 | "Environment :: Console",
22 | "License :: OSI Approved :: GNU General Public License v2 or later (GPLv2+)",
23 | "Operating System :: OS Independent",
24 | "Programming Language :: Python :: 3",
25 | "Topic :: Scientific/Engineering :: Electronic Design Automation (EDA)",
26 | "Topic :: Utilities",
27 | ],
28 | python_requires='>=3.6',
29 | install_requires=["numpy", "tqdm", "argparse"] + ["opencv-python"] if os.getenv("SETUP_IGNORE_OPENCV", "0")=="0" else [],
30 | entry_points={
31 | "console_scripts": [
32 | "rastercarve=rastercarve.__main__:main",
33 | ]
34 | }
35 | )
36 |
--------------------------------------------------------------------------------
34 |
35 | # Installation
36 |
37 | `$ pip install rastercarve`
38 |
39 | Running straight from the source tree works fine, too:
40 |
41 | `$ python -m rastercarve -h`
42 |
43 | # Usage
44 |
45 | ```
46 | $ rastercarve --width 10 examples/test.png > out.nc
47 | Generating G-code: 100%|██████████████████| 278/278 [00:04<00:00, 57.10 lines/s]
48 | === Statistics ===
49 | Input resolution: 512x512 px
50 | Output dimensions: 10.00" wide by 10.00" tall = 100.0 in^2
51 | Max line depth: 0.080 in
52 | Max line width: 0.043 in (30.0 deg V-bit)
53 | Line spacing: 0.047 in (110% stepover)
54 | Line angle: 22.5 deg
55 | Number of lines: 277
56 | Input resolution: 51.2 PPI
57 | Output resolution: 100.0 PPI
58 | Scaled image by f=3.91 (200.0 PPI)
59 | Total toolpath length: 2202.6 in
60 | - Rapids: 34.6 in (8.6 s)
61 | - Plunges: 29.8 in (59.6 s)
62 | - Moves: 2138.2 in (1282.9 s)
63 | Feed rate: 100.0 in/min
64 | Plunge rate: 30.0 in/min
65 | Estimated machining time: 1351.2 sec
66 | 1 suppressed debug message(s).
67 | ```
68 |
69 | This command generates G-code to engrave `examples/test.png` into an
70 | piece of material 10 inches wide. Exactly one of the `--width` or
71 | `--height` parameters must be specified on the command line; the other
72 | will be calculated automatically.
73 |
74 | The engraving parameters can be safely left at their defaults, though
75 | fine-tuning is possible depending on material and machine
76 | characteristics.
77 |
78 | The output G-code will be piped to `out.nc`, which any CNC machine
79 | should accept as input.
80 |
81 | # Machining Process
82 |
83 | With the toolpath generated, it is time to run the job. Presumably you
84 | know the specifics of your particular machine, so I'll only outline
85 | the high-level steps here:
86 |
87 | 1. Load the right tool. An engraving bit is best, though ordinary
88 | V-bits give acceptable results. Make sure that the tool angle matches
89 | that used to generate the toolpath (30 degrees is the default --
90 | change this if needed).
91 |
92 | 2. Load the material. MDF seems to work best; plywood and ordinary
93 | lumber are too prone to chipping. Plastics have a tendency to melt and
94 | stick to the bit.
95 |
96 | 3. Zero X and Y axes at the top left corner of the eventual image
97 | location. Double check that the bottom right corner is in bounds.
98 |
99 | 4. Zero the Z axis to the top surface of the material.
100 |
101 | 5. Load and run the toolpath. The engraving will begin in the top
102 | right corner and work its way down to the bottom right in a serpentine
103 | fashion.
104 |
105 | ## Ramping
106 |
107 | Some tools (e.g. ShopBot) have an option to control acceleration ramping
108 | speeds. The intricate nature of many raster engraving toolpaths generated
109 | with this program tend to trigger unneccessary speed ramping on these
110 | machines, leading to very slow cycle times. The solution to this is to
111 | set more aggressive ramping values. (ShopBot users can use [VR].)
112 |
113 | # Advanced
114 |
115 | ```
116 | usage: rastercarve [-h] (--width WIDTH | --height HEIGHT) [-f FEED_RATE]
117 | [-p PLUNGE_RATE] [--rapid RAPID_RATE] [-z SAFE_Z]
118 | [--end-z TRAVERSE_Z] [-t TOOL_ANGLE] [-d MAX_DEPTH]
119 | [-a LINE_ANGLE] [-s STEPOVER] [-r LINEAR_RESOLUTION]
120 | [--dots] [--no-line-numbers]
121 | [--preamble PREAMBLE | --preamble-file PREAMBLE_FILE]
122 | [--epilogue EPILOGUE | --epilogue-file EPILOGUE_FILE]
123 | [--json JSON_DEST] [--debug] [-q] [--version]
124 | filename
125 |
126 | Generate G-code to engrave raster images.
127 |
128 | positional arguments:
129 | filename input image (any OpenCV-supported format)
130 |
131 | optional arguments:
132 | -h, --help show this help message and exit
133 | --json JSON_DEST dump statistics in JSON format
134 | --debug print debug messages
135 | -q disable progress and statistics
136 | --version show program's version number and exit
137 |
138 | output dimensions:
139 | Exactly one required. Image will be scaled while maintaining aspect ratio.
140 |
141 | --width WIDTH output width (in)
142 | --height HEIGHT output height (in)
143 |
144 | machine configuration:
145 | -f FEED_RATE engraving feed rate (in/min) (default: 100)
146 | -p PLUNGE_RATE engraving plunge rate (in/min) (default: 30)
147 | --rapid RAPID_RATE rapid traverse rate (for time estimation only)
148 | (default: 240)
149 | -z SAFE_Z rapid traverse height (in) (default: 0.1)
150 | --end-z TRAVERSE_Z Z height of final traverse (in) (default: 2)
151 | -t TOOL_ANGLE included angle of tool (deg) (default: 30)
152 |
153 | engraving parameters:
154 | -d MAX_DEPTH maximum engraving depth (in) (default: 0.08)
155 | -a LINE_ANGLE angle of grooves from horizontal (deg) (default: 22.5)
156 | -s STEPOVER stepover percentage (affects spacing between lines)
157 | (default: 110)
158 | -r LINEAR_RESOLUTION distance between successive G-code points (in)
159 | (default: 0.01)
160 | --dots engrave using dots instead of lines (experimental)
161 |
162 | G-code parameters:
163 | --no-line-numbers suppress G-code line numbers (dangerous on ShopBot!)
164 | --preamble PREAMBLE override the default G-code preamble; to specify
165 | multiple lines on the command line, use $'' strings
166 | with \n; each line of the preamble will be prepended
167 | with a line number, except when used with --no-line-
168 | numbers
169 | --preamble-file PREAMBLE_FILE
170 | like --preamble, but read from a file
171 | --epilogue EPILOGUE override the default G-code epilogue; see above notes
172 | for --preamble
173 | --epilogue-file EPILOGUE_FILE
174 | like --epilogue, but read from a file
175 |
176 | The default feeds have been found to be safe values for medium-density
177 | fiberboard (MDF). Experimenting with the STEPOVER, LINE_ANGLE, and
178 | LINEAR_RESOLUTION may yield improvements in engraving quality at the cost of
179 | increased machining time. On ShopBot machines, the --no-line-numbers flag must
180 | not be used, since the spindle will fail to start and damage the material. Use
181 | this flag with caution on other machines.
182 | ```
183 |
184 | ## G-code Customization
185 |
186 | The G-code produced should work out-of-the-box on ShopBot machines. Other
187 | machines may need some fine-tuning.
188 |
189 | ### Preamble
190 |
191 | The default G-code preamble is
192 |
193 | ```
194 | G00 G20
195 | M03
196 | ```
197 |
198 | This tells the machine to use inch units (`G20`) and then starts the
199 | spindle (`M03`).
200 |
201 | The default G-code epilogue is
202 |
203 | ```
204 | M05
205 | ```
206 |
207 | This does nothing but stop the spindle.
208 |
209 | The `--preamble[-file]` and `--epilogue[-file]` options allow you to specify
210 | a custom G-code header or footer to override the default. Note that in writing
211 | a custom preamble/epilogue, you should *not* include line numbers; the program
212 | will automatically insert them on each line of the supplied preamble/epilogue.
213 |
214 | ## Metric Units
215 |
216 | Passing the `--metric` flag will replace the default `G20` directive with `G21`
217 | to force metric units. If this is passed, all measurements given will be
218 | interpreted as millimeters. E.g., `--width 100` will be interpreted as a width
219 | of 100mm. (That is to say, the `--metric` flag is comparatively dumb; no
220 | internal unit scaling takes place -- only the preamble is changed.)
221 |
222 | Note that the `--metric` flag cannot be used in conjunction with
223 | `--preamble[-file]`. If a custom preamble is necessary with metric
224 | units, just include `G21` in the custom preamble.
225 |
226 | ## Pen Plotting
227 |
228 | The generated toolpaths produce excellent results when used with pen plotters
229 | instead of engraving bits (see above). The machine setup is a little more
230 | complicated, though: the Z height must be set to half the maximum engraving
231 | depth *above* the material for the black and white regions to be drawn
232 | correctly.
233 |
234 | # Related
235 |
236 | [Vectric PhotoVCarve](https://www.vectric.com/products/photovcarve) -
237 | a similar commercial solution. This program is not derived from
238 | PhotoVCarve.
239 |
240 | [My blog post](https://www.fwei.tk/blog/opening-black-boxes.html) -
241 | writeup on the development process.
242 |
--------------------------------------------------------------------------------
/examples/pen_plotter.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/built1n/rastercarve/e614cf1072363c37a6b678af9ac6dc5677f9919a/examples/pen_plotter.jpg
--------------------------------------------------------------------------------
/examples/test.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/built1n/rastercarve/e614cf1072363c37a6b678af9ac6dc5677f9919a/examples/test.png
--------------------------------------------------------------------------------
/rastercarve/__init__.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | # -*- coding: utf-8 -*-
3 |
4 | # RasterCarve
5 | #
6 | # Copyright (C) 2019-2020 Franklin Wei
7 | #
8 | # This program is free software; you can redistribute it and/or
9 | # modify it under the terms of the GNU General Public License
10 | # as published by the Free Software Foundation; either version 2
11 | # of the License, or (at your option) any later version.
12 | #
13 | # This software is distributed on an "AS IS" basis, WITHOUT WARRANTY OF ANY
14 | # KIND, either express or implied.
15 |
16 | __version__ = '1.0.8'
17 |
--------------------------------------------------------------------------------
/rastercarve/__main__.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | # -*- coding: utf-8 -*-
3 |
4 | # RasterCarve
5 | #
6 | # Copyright (C) 2019-2020 Franklin Wei
7 | #
8 | # This program is free software; you can redistribute it and/or
9 | # modify it under the terms of the GNU General Public License
10 | # as published by the Free Software Foundation; either version 2
11 | # of the License, or (at your option) any later version.
12 | #
13 | # This software is distributed on an "AS IS" basis, WITHOUT WARRANTY OF ANY
14 | # KIND, either express or implied.
15 |
16 | import math
17 | import sys
18 |
19 | from rastercarve import __version__
20 |
21 | import argparse
22 | import cv2 # image scaling
23 | import io # stringIO for parsing lines
24 | import json
25 | import numpy as np # a little vector stuff
26 | from tqdm import tqdm # progress bar
27 |
28 | glob_args = None
29 |
30 | ##### Default parameters
31 | #### Machine configuration
32 | DEF_FEED_RATE = 100 # in / min
33 | DEF_PLUNGE_RATE = 30 # in / min
34 | DEF_RAPID_RATE = 240 # in / min (used only for time estimation)
35 | DEF_SAFE_Z = .1 # tool will start/end this high from material
36 | DEF_TRAVERSE_Z = 2 # ending height (in)
37 | DEF_MAX_DEPTH = .080 # full black is this many inches deep
38 | DEF_TOOL_ANGLE = 30 # included angle of tool (we assume a V-bit). change if needed
39 |
40 | #### Cutting parameters
41 | DEF_STEPOVER = 110
42 | DEF_LINE_ANGLE = 22.5 # angle of lines across image, [0-90) degrees
43 | DEF_LINEAR_RESOLUTION = .01 # spacing between image samples along a line (inches)
44 |
45 | #### G-code parameters
46 | DEF_PREAMBLE = "G00 G20\nM03"
47 | DEF_PREAMBLE_METRIC = "G00 G21\nM03"
48 | DEF_EPILOGUE = "M05"
49 |
50 | #### Image interpolation
51 | SUPERSAMPLE = 2 # scale heightmap by this factor before cutting
52 |
53 | #### Internal stuff - don't mess with this
54 | DEG2RAD = math.pi / 180
55 |
56 | # Unit names
57 | UNIT_LONG = "in"
58 | UNIT_SHORT = "\""
59 | MM_LONG = MM_SHORT = "mm"
60 |
61 | #### Parameter constraints
62 | CONSTRAINTS = [
63 | '0 <= glob_args.line_angle < 90',
64 | '0 < glob_args.tool_angle < 180',
65 | '0 < glob_args.feed_rate',
66 | '0 < glob_args.plunge_rate',
67 | '0 < glob_args.safe_z',
68 | '0 < glob_args.traverse_z',
69 | '0 < glob_args.max_depth',
70 | '100 <= glob_args.stepover',
71 | '0 < glob_args.linear_resolution',
72 | '(hasattr(glob_args, "height") and glob_args.height > 0) or (hasattr(glob_args, "width") and glob_args.width > 0)',
73 | 'not (hasattr(glob_args, "metric") and (hasattr(glob_args, "preamble") or hasattr(glob_args, "preamble_file")))'
74 | ]
75 |
76 | # floating-point range
77 | def frange(x, y, jump):
78 | while x < y:
79 | yield x
80 | x += jump
81 |
82 | def eprint(s):
83 | if not hasattr(glob_args, 'quiet'):
84 | print(s, file=sys.stderr)
85 |
86 | debug_msgs = 0
87 | def debug(str):
88 | global debug_msgs
89 | if hasattr(glob_args, 'debug'):
90 | eprint(str)
91 | debug_msgs += 1
92 |
93 | line_no = 1
94 | def gcode(s):
95 | global line_no
96 | print((s if hasattr(glob_args, 'suppress_linenos') else "N%d %s" % (line_no, s)) )
97 | line_no += 1
98 |
99 | def gcode_multiline(s):
100 | f = io.StringIO(s)
101 | for l in f:
102 | gcode(l.rstrip())
103 |
104 |
105 | pathlen = 0 # in
106 | rapidlen = 0 # in
107 | plungelen = 0 # in
108 | movelen = 0 # in
109 | pathtime = 0 # sec
110 | lastpos = None
111 |
112 | # movetype: 1 = feed, 2 = rapid, 3 = plunge
113 | def updatePos(pos, feedrate, movetype):
114 | global pathlen, rapidlen, plungelen, movelen, lastpos, pathtime
115 | if lastpos is None:
116 | lastpos = pos
117 | return
118 | d = np.linalg.norm(pos - lastpos)
119 | pathlen += d
120 |
121 | # account for different types of moves separately
122 | if movetype == 1:
123 | movelen += d
124 | elif movetype == 2:
125 | rapidlen += d
126 | elif movetype == 3:
127 | plungelen += d
128 |
129 | pathtime += d / (feedrate / 60)
130 | lastpos = pos
131 |
132 | # reflect as needed
133 | def transform(x, y):
134 | return x, -y
135 |
136 | # we will negate the Y axis in all these
137 | def move(x, y, z, f):
138 | x, y = transform(x, y)
139 | gcode("G1 F%d X%f Y%f Z%f" % (f, x, y, z))
140 | updatePos(np.array([x, y, z]), f, 1)
141 |
142 | def moveRapid(x, y, z):
143 | x, y = transform(x, y)
144 | gcode("G0 X%f Y%f Z%f" % (x, y, z))
145 | updatePos(np.array([x, y, z]), glob_args.rapid_rate, 2)
146 |
147 | def moveSlow(x, y, z):
148 | x, y = transform(x, y)
149 | f = glob_args.plunge_rate
150 | gcode("G1 F%d X%f Y%f Z%f" % (f, x, y, z))
151 | updatePos(np.array([x, y, z]), f, 3)
152 |
153 | def moveRapidXY(x, y):
154 | x, y = transform(x, y)
155 | gcode("G0 X%f Y%f" % (x, y))
156 | updatePos(np.array([x, y, lastpos[2]]), glob_args.rapid_rate, 2)
157 |
158 | def moveZ(z, f):
159 | gcode("G1 F%d Z%f" % (f, z))
160 | newpos = lastpos
161 | newpos[2] = z
162 | updatePos(newpos, f, 2)
163 |
164 | def getPix(image, x, y):
165 | # clamp
166 | x = max(0, min(int(x), image.shape[1]-1))
167 | y = max(0, min(int(y), image.shape[0]-1))
168 |
169 | return image[y, x]
170 |
171 | # return how deep to cut given a pixel value
172 | def getDepth(pix):
173 | # may want to do gamma mapping
174 | return -float(pix) / 256 * glob_args.max_depth
175 |
176 | def inBounds(img_size, x):
177 | return 0 <= x[0] and x[0] <= img_size[0] and 0 <= x[1] and x[1] <= img_size[1]
178 |
179 | # Engrave one line across the image. start and d are vectors in the
180 | # output space representing the start point and direction of
181 | # machining, respectively. start should be on the border of the image,
182 | # and d should point INTO the image.
183 | def engraveLine(img_interp, img_size, ppi, start, d, step):
184 | v = start
185 | d = d / np.linalg.norm(d)
186 |
187 | # disabled -FW
188 | # if not inBounds(img_size, v):
189 | # debug("Refusing to engrave out of bounds. (Possible programming error, you idiot!): %s, %s" % (v, img_size))
190 | # return start
191 |
192 | moveZ(glob_args.safe_z, glob_args.plunge_rate)
193 | moveRapidXY(v[0], v[1])
194 |
195 | first = True
196 | quitNext = False
197 | while True:
198 | img_x = int(round(v[0] * ppi))
199 | img_y = int(round(v[1] * ppi))
200 | x, y = v
201 | depth = getDepth(getPix(img_interp, img_x, img_y))
202 | if not first:
203 | if hasattr(glob_args, 'pointmode'):
204 | move(x, y, glob_args.safe_z, glob_args.feed_rate)
205 | move(x, y, depth, glob_args.feed_rate)
206 | move(x, y, glob_args.safe_z, glob_args.feed_rate)
207 | else:
208 | move(x, y, depth, glob_args.feed_rate)
209 | else:
210 | first = False
211 | moveSlow(x, y, depth)
212 | if hasattr(glob_args, 'pointmode'):
213 | moveSlow(x, y, glob_args.safe_z)
214 |
215 | if quitNext:
216 | return v
217 | v += step * d
218 |
219 | # engrave to the edge
220 | if not inBounds(img_size, v):
221 | v -= step * d
222 | c = ((img_size[0] - v[0]) / d[0]) if (d[0] > 0 and d[1] == 0) else \
223 | min(-v[1] / d[1], (img_size[0] - v[0]) / d[0]) if (d[0] > 0 and d[1] != 0) else \
224 | min(-v[0] / d[0], (img_size[1] - v[1]) / d[1])
225 | v += c * d
226 |
227 | quitNext = True
228 |
229 | # return last engraved point
230 | return v
231 |
232 | def checkCondition(cond):
233 | success = eval(cond)
234 | if not success:
235 | eprint("ERROR: Invalid parameter: %s" % cond)
236 | return success
237 |
238 | def dump_stats(orig_size, img_size, line_width, line_spacing,
239 | nlines, img_ppi, output_ppi, scale_factor, interp_ppi, pathlen,
240 | rapidlen, plungelen, movelen, pathtime):
241 | eprint("=== Statistics ===")
242 | eprint(f"Input resolution: %dx%d px" % (orig_size[0], orig_size[1]))
243 | eprint(f"Output dimensions: %.2f{UNIT_SHORT} wide by %.2f{UNIT_SHORT} tall = %.1f {UNIT_LONG}^2" % (img_size[0], img_size[1], img_size[0] * img_size[1]))
244 | eprint(f"Max line depth: %.3f {UNIT_LONG}" % (glob_args.max_depth))
245 | eprint(f"Max line width: %.3f {UNIT_LONG} (%.1f deg V-bit)" % (line_width, glob_args.tool_angle))
246 | eprint(f"Line spacing: %.3f {UNIT_LONG} (%d%% stepover)" % (line_spacing, int(round(glob_args.stepover))))
247 | eprint(f"Line angle: %.1f deg" % (glob_args.line_angle))
248 | eprint(f"Number of lines: %d" % (nlines))
249 | eprint(f"Input resolution: %.1f PPI" % (img_ppi))
250 | eprint(f"Output resolution: %.1f PPI" % (output_ppi))
251 | eprint(f"Scaled image by f=%.2f (%.1f PPI)" % (scale_factor, interp_ppi))
252 | eprint(f"Total toolpath length: %.1f {UNIT_LONG}" % (pathlen))
253 | eprint(f" - Rapids: %.1f {UNIT_LONG} (%.1f sec)" % (rapidlen, rapidlen / (glob_args.rapid_rate / 60)))
254 | eprint(f" - Plunges: %.1f {UNIT_LONG} (%.1f sec)" % (plungelen, plungelen / (glob_args.plunge_rate / 60)))
255 | eprint(f" - Moves: %.1f {UNIT_LONG} (%.1f sec)" % (movelen, movelen / (glob_args.feed_rate / 60)))
256 | eprint(f"Feed rate: %.1f {UNIT_LONG}/min" % (glob_args.feed_rate))
257 | eprint(f"Plunge rate: %.1f {UNIT_LONG}/min" % (glob_args.plunge_rate))
258 | eprint(f"Estimated machining time: %.1f sec" % (pathtime))
259 |
260 | if hasattr(glob_args, 'json_dest'):
261 | with open(glob_args.json_dest, 'w') as f:
262 | # only dump stats relevant to web frontend
263 | stats = {
264 | 'output_dimensions': {
265 | 'width': img_size[0],
266 | 'height': img_size[1]
267 | },
268 | 'line_width': line_width,
269 | 'line_spacing': line_spacing,
270 | 'nlines': int(nlines),
271 | 'img_ppi': img_ppi,
272 | 'output_ppi': output_ppi,
273 | 'interp_ppi': interp_ppi,
274 | 'pathlen': pathlen,
275 | 'pathtime': pathtime
276 | }
277 |
278 | json.dump(stats, f)
279 |
280 | def getPreambleEpilogue():
281 | global glob_args
282 | pre, epi = DEF_PREAMBLE, DEF_EPILOGUE
283 | if hasattr(glob_args, 'preamble'):
284 | pre = glob_args.preamble
285 | elif hasattr(glob_args, 'preamble_file'):
286 | with open(glob_args.preamble_file) as f:
287 | pre = f.read()
288 |
289 | if hasattr(glob_args, 'epilogue'):
290 | epi = glob_args.epilogue
291 | elif hasattr(glob_args, 'epilogue_file'):
292 | with open(glob_args.epilogue_file) as f:
293 | epi = f.read()
294 |
295 | return pre, epi
296 |
297 | def setMetric():
298 | global DEF_PREAMBLE, UNIT_LONG, UNIT_SHORT
299 | DEF_PREAMBLE = DEF_PREAMBLE_METRIC
300 | UNIT_LONG, UNIT_SHORT = MM_LONG, MM_SHORT
301 |
302 | def doEngrave():
303 | # check parameter sanity
304 | for c in CONSTRAINTS:
305 | if not checkCondition(c):
306 | eprint("Refusing to generate G-code.")
307 | return
308 |
309 | if hasattr(glob_args, 'metric'):
310 | setMetric()
311 |
312 | preamble, epilogue = getPreambleEpilogue()
313 |
314 | # invert and convert to grayscale
315 | img = ~cv2.cvtColor(cv2.imread(glob_args.filename), cv2.COLOR_BGR2GRAY)
316 |
317 | orig_h, orig_w = orig_size = img.shape[:2] # pixels
318 |
319 | img_w, img_h = img_size = (glob_args.width, glob_args.width * (orig_h / orig_w)) if hasattr(glob_args, 'width') else (glob_args.height * (orig_w / orig_h), glob_args.height) # inches
320 |
321 | img_ppi = orig_w / img_w # should be the same for X and Y directions
322 |
323 | depth2width = 2 * math.tan(glob_args.tool_angle / 2 * DEG2RAD) # multiply by this to get the width of a cut
324 | line_width = glob_args.max_depth * depth2width
325 | line_spacing = glob_args.stepover * line_width / 100.0 # orthogonal distance between lines
326 | output_ppi = 1 / glob_args.linear_resolution # linear PPI of engraved image
327 |
328 | # scale up the image with interpolation
329 | # we want the image DPI to match our engraving DPI (which is glob_args.linear_resolution)
330 | scale_factor = SUPERSAMPLE * output_ppi / img_ppi
331 | img_interp = cv2.resize(img, None, fx = scale_factor, fy = scale_factor)
332 | interp_ppi = img_ppi * scale_factor
333 |
334 | print("( Generated by rastercarve: github.com/built1n/rastercarve )")
335 | print("( Image name: %s )" % (glob_args.filename))
336 |
337 | gcode_multiline(preamble)
338 |
339 | d = np.array([math.cos(glob_args.line_angle * DEG2RAD),
340 | -math.sin(glob_args.line_angle * DEG2RAD)])
341 |
342 | max_y = img_h + img_w * -d[1] / d[0] # highest Y we'll loop to
343 | yspace = line_spacing / math.cos(glob_args.line_angle * DEG2RAD) # vertical spacing between lines
344 | xspace = line_spacing / math.sin(glob_args.line_angle * DEG2RAD) if glob_args.line_angle != 0 else 0 # horizontal space
345 |
346 | nlines = round(max_y / yspace)
347 |
348 | ### Generate toolpath
349 | moveRapid(0, 0, glob_args.safe_z)
350 | end = None
351 |
352 | for y in tqdm(frange(0, max_y - yspace, yspace * 2),
353 | total = nlines / 2,
354 | desc = 'Generating G-code',
355 | unit = ' lines',
356 | unit_scale = 2,
357 | disable = hasattr(glob_args, 'quiet')): # we engrave two lines per loop
358 | start = np.array([0, y]).astype('float64')
359 |
360 | # start some vectors on the bottom edge of the image
361 | if d[1] != 0:
362 | c = (img_h - y) / d[1] # solve (start + cd)_y = h for c
363 | if c >= 0:
364 | start += c * d
365 |
366 | start = engraveLine(img_interp, img_size, interp_ppi, start, d, glob_args.linear_resolution)
367 |
368 | # now engrave the other direction
369 | # we just need to flip d and move start over
370 |
371 | # see which side of the image the last line ran out on (either top or right side)
372 | last = start + glob_args.linear_resolution * d
373 |
374 | if last[1] < 0:
375 | start[0] += xspace
376 | else:
377 | start[1] += yspace
378 |
379 | # check if we ran out the top-right corner (this needs special treatment)
380 | if start[0] >= img_w:
381 | debug("Special case TRIGGERED")
382 | c = (start[0] - img_w) / d[0]
383 | start -= c * d
384 |
385 | end = engraveLine(img_interp, img_size, interp_ppi, start, -d, glob_args.linear_resolution)
386 |
387 | moveSlow(end[0], end[1], glob_args.traverse_z)
388 | moveRapid(0, 0, glob_args.traverse_z)
389 |
390 | gcode_multiline(epilogue)
391 |
392 | dump_stats(orig_size, img_size, line_width, line_spacing,
393 | nlines, img_ppi, output_ppi, scale_factor, interp_ppi, pathlen,
394 | rapidlen, plungelen, movelen, pathtime)
395 |
396 | if not hasattr(glob_args, 'debug') and debug_msgs > 0:
397 | eprint("%d suppressed debug message(s)." % (debug_msgs))
398 |
399 | def main():
400 | parser = argparse.ArgumentParser(prog='rastercarve',
401 | formatter_class=argparse.ArgumentDefaultsHelpFormatter,
402 | description='Generate G-code to engrave raster images.',
403 | epilog=
404 | """
405 | The default feeds have been found to be safe values for medium-density
406 | fiberboard (MDF). Experimenting with the STEPOVER, LINE_ANGLE, and
407 | LINEAR_RESOLUTION may yield improvements in engraving quality at the
408 | cost of increased machining time.
409 |
410 | On ShopBot machines, the --no-line-numbers flag must not be used,
411 | since the spindle will fail to start and damage the material. Use this
412 | flag with caution on other machines.""")
413 | parser.add_argument('filename', help='input image (any OpenCV-supported format)')
414 |
415 | dim_group = parser.add_argument_group('output dimensions', 'Exactly one required. Image will be scaled while maintaining aspect ratio.')
416 | mutex_group = dim_group.add_mutually_exclusive_group(required=True)
417 | mutex_group.add_argument('--width', help='output width (in)', action='store', dest='width', type=float, default=argparse.SUPPRESS)
418 | mutex_group.add_argument('--height', help='output height (in)', action='store', dest='height', type=float, default=argparse.SUPPRESS)
419 |
420 | mach_group = parser.add_argument_group('machine configuration')
421 | mach_group.add_argument('-f', help='engraving feed rate (in/min)', action='store', dest='feed_rate', default=DEF_FEED_RATE, type=float)
422 | mach_group.add_argument('-p', help='engraving plunge rate (in/min)', action='store', dest='plunge_rate', default=DEF_PLUNGE_RATE, type=float)
423 | mach_group.add_argument('--rapid', help='rapid traverse rate (for time estimation only)', action='store', dest='rapid_rate', default=DEF_RAPID_RATE, type=float)
424 | mach_group.add_argument('-z', help='rapid traverse height (in)', action='store', dest='safe_z', default=DEF_SAFE_Z, type=float)
425 | mach_group.add_argument('--end-z', help='Z height of final traverse (in)', action='store', dest='traverse_z', default=DEF_TRAVERSE_Z, type=float)
426 | mach_group.add_argument('-t', help='included angle of tool (deg)', action='store', dest='tool_angle', default=DEF_TOOL_ANGLE, type=float)
427 |
428 | cut_group = parser.add_argument_group('engraving parameters')
429 | cut_group.add_argument('-d', help='maximum engraving depth (in)', action='store', dest='max_depth', default=DEF_MAX_DEPTH, type=float)
430 | cut_group.add_argument('-a', help='angle of grooves from horizontal (deg)', action='store', dest='line_angle', default=DEF_LINE_ANGLE, type=float)
431 | cut_group.add_argument('-s', help='stepover percentage (affects spacing between lines)', action='store', dest='stepover', default=DEF_STEPOVER, type=float)
432 | cut_group.add_argument('-r', help='distance between successive G-code points (in)', action='store', dest='linear_resolution', default=DEF_LINEAR_RESOLUTION, type=float)
433 | cut_group.add_argument('--dots', help='engrave using dots instead of lines (experimental)', action='store_true', dest='pointmode', default=argparse.SUPPRESS)
434 |
435 |
436 | gcode_group = parser.add_argument_group('G-code parameters')
437 |
438 | gcode_group.add_argument('--metric', help='change all units to millimeters (sets G21); cannot be used with --preamble or --preamble-file', action='store_true', dest='metric', default=argparse.SUPPRESS)
439 | gcode_group.add_argument('--no-line-numbers', help='suppress G-code line numbers (dangerous on ShopBot!)', action='store_true', dest='suppress_linenos', default=argparse.SUPPRESS)
440 |
441 | preamble_group = gcode_group.add_mutually_exclusive_group(required=False)
442 | preamble_group.add_argument('--preamble', help='override the default G-code preamble; to specify multiple lines on the command line, use $\'\' strings with \\n; each line of the preamble will be prepended with a line number, except when used with --no-line-numbers', action='store', dest='preamble', default=argparse.SUPPRESS)
443 | preamble_group.add_argument('--preamble-file', help='like --preamble, but read from a file', action='store', dest='preamble_file', default=argparse.SUPPRESS)
444 |
445 | epilogue_group = gcode_group.add_mutually_exclusive_group(required=False)
446 | epilogue_group.add_argument('--epilogue', help='override the default G-code epilogue; see above notes for --preamble', action='store', dest='epilogue', default=argparse.SUPPRESS)
447 | epilogue_group.add_argument('--epilogue-file', help='like --epilogue, but read from a file', action='store', dest='epilogue_file', default=argparse.SUPPRESS)
448 |
449 | parser.add_argument('--json', help='dump statistics in JSON format', action='store', dest='json_dest', default=argparse.SUPPRESS)
450 | parser.add_argument('--debug', help='print debug messages', action='store_true', dest='debug', default=argparse.SUPPRESS)
451 | parser.add_argument('-q', help='disable progress and statistics', action='store_true', dest='quiet', default=argparse.SUPPRESS)
452 | parser.add_argument('--version', help="show program's version number and exit", action='version', version=__version__)
453 |
454 | global glob_args
455 | glob_args = parser.parse_args()
456 | debug(glob_args)
457 |
458 | doEngrave()
459 |
460 | if __name__=="__main__":
461 | main()
462 |
--------------------------------------------------------------------------------
/setup.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | import os
3 | import setuptools
4 | from rastercarve import __version__
5 |
6 | with open("README.md", "r") as fh:
7 | long_description = fh.read()
8 |
9 | setuptools.setup(
10 | name="rastercarve", # Replace with your own username
11 | version=__version__,
12 | author="Franklin Wei",
13 | author_email="franklin@rockbox.org",
14 | description="Generate G-code to engrave raster images",
15 | long_description=long_description,
16 | long_description_content_type="text/markdown",
17 | url="https://github.com/built1n/rastercarve",
18 | packages=setuptools.find_packages(),
19 | classifiers=[
20 | "Development Status :: 5 - Production/Stable",
21 | "Environment :: Console",
22 | "License :: OSI Approved :: GNU General Public License v2 or later (GPLv2+)",
23 | "Operating System :: OS Independent",
24 | "Programming Language :: Python :: 3",
25 | "Topic :: Scientific/Engineering :: Electronic Design Automation (EDA)",
26 | "Topic :: Utilities",
27 | ],
28 | python_requires='>=3.6',
29 | install_requires=["numpy", "tqdm", "argparse"] + ["opencv-python"] if os.getenv("SETUP_IGNORE_OPENCV", "0")=="0" else [],
30 | entry_points={
31 | "console_scripts": [
32 | "rastercarve=rastercarve.__main__:main",
33 | ]
34 | }
35 | )
36 |
--------------------------------------------------------------------------------