├── resources
├── demo.png
└── filter.png
├── action
└── GenerateGrasps.action
├── msg
└── GraspGeneratorOptions.msg
├── launch
├── grasp_generator_server.launch
├── grasp_test_rviz.launch
├── grasp_filter_test.launch
├── grasp_test.launch
└── simple_grasps.rviz
├── config
├── clam_grasp_data.yaml
├── reem_grasp_data.yaml
├── baxter_grasp_data.yaml
├── nao_grasp_data.yaml
├── pepper_grasp_data.yaml
└── romeo_grasp_data.yaml
├── package.xml
├── .travis.yml
├── CMakeLists.txt
├── CHANGELOG.rst
├── scripts
└── server_test.py
├── include
└── moveit_simple_grasps
│ ├── custom_environment2.h
│ ├── grasp_data.h
│ ├── grasp_filter.h
│ ├── simple_grasps.h
│ └── moveit_blocks.h
├── src
├── simple_grasps_server.cpp
├── simple_grasps_test.cpp
├── grasp_filter_test.cpp
├── grasp_filter.cpp
├── grasp_data.cpp
└── simple_grasps.cpp
└── README.md
/resources/demo.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/davetcoleman/moveit_simple_grasps/HEAD/resources/demo.png
--------------------------------------------------------------------------------
/resources/filter.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/davetcoleman/moveit_simple_grasps/HEAD/resources/filter.png
--------------------------------------------------------------------------------
/action/GenerateGrasps.action:
--------------------------------------------------------------------------------
1 | #goal
2 | geometry_msgs/Pose pose
3 | float64 width
4 | moveit_simple_grasps/GraspGeneratorOptions[] options
5 | ---
6 | #result
7 | moveit_msgs/Grasp[] grasps
8 | ---
9 | #feedback
10 | moveit_msgs/Grasp[] grasps
11 |
--------------------------------------------------------------------------------
/msg/GraspGeneratorOptions.msg:
--------------------------------------------------------------------------------
1 | uint8 grasp_axis
2 | uint8 GRASP_AXIS_X = 0
3 | uint8 GRASP_AXIS_Y = 1
4 | uint8 GRASP_AXIS_Z = 2
5 |
6 | uint8 grasp_direction
7 | uint8 GRASP_DIRECTION_UP = 0
8 | uint8 GRASP_DIRECTION_DOWN = 1
9 |
10 | uint8 grasp_rotation
11 | uint8 GRASP_ROTATION_HALF = 0
12 | uint8 GRASP_ROTATION_FULL = 1
13 |
--------------------------------------------------------------------------------
/launch/grasp_generator_server.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
--------------------------------------------------------------------------------
/launch/grasp_test_rviz.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
16 |
17 |
18 |
19 |
--------------------------------------------------------------------------------
/config/clam_grasp_data.yaml:
--------------------------------------------------------------------------------
1 | base_link: 'base_link'
2 |
3 | # =====================================================
4 | gripper_group: # ee group name
5 | end_effector_name: 'gripper_group' # ee group name
6 |
7 | #actuated joints in end effector
8 | joints : ['gripper_finger_joint']
9 |
10 | #open position
11 | pregrasp_posture : [-0.925023722222]
12 | pregrasp_time_from_start : 4.0
13 |
14 | #close position
15 | grasp_posture : [1.0]
16 | grasp_time_from_start : 4.0
17 |
18 | #desired pose from end effector to grasp - [x,y,z]
19 | grasp_pose_to_eef : [-0.14,0,0]
20 |
21 | #desired pose from end effector to grasp - [r, p, y]
22 | grasp_pose_to_eef_rotation : [0, 0, 0] # 1.5707 = PI/2
23 |
24 | end_effector_parent_link : 'gripper_roll_link'
--------------------------------------------------------------------------------
/launch/grasp_filter_test.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
--------------------------------------------------------------------------------
/config/reem_grasp_data.yaml:
--------------------------------------------------------------------------------
1 | base_link: 'base_link'
2 |
3 | # =====================================================
4 | right_hand:
5 | end_effector_name: 'right_hand'
6 |
7 | #default grasp params
8 | joints : ['hand_right_index_joint', 'hand_right_middle_joint', 'hand_right_thumb_joint']
9 | pregrasp_posture : [0.0, 0.0, 2.0]
10 | pregrasp_time_from_start : 4.0
11 | grasp_posture : [4.5, 4.5, 2.0]
12 | grasp_time_from_start : 4.0
13 |
14 | #desired pose from end effector to grasp
15 | grasp_pose_to_eef : [0.054, 0.0, 0.018]
16 |
17 | #desired pose from end effector to grasp - [r, p, y]
18 | grasp_pose_to_eef_rotation : [0, 1.5708, 0] # 1.5707 = PI/2
19 |
20 | end_effector_parent_link: 'right_hand_grasping_frame'
21 | # =====================================================
22 | left_hand:
23 | end_effector_name: 'left_hand'
24 |
25 | #default grasp params
26 | joints : ['hand_left_index_joint', 'hand_left_middle_joint', 'hand_left_thumb_joint']
27 | pregrasp_posture : [0.0, 0.0, 2.0]
28 | pregrasp_time_from_start : 4.0
29 | grasp_posture : [4.5, 4.5, 2.0]
30 | grasp_time_from_start : 4.0
31 |
32 | #desired pose from end effector to grasp
33 | grasp_pose_to_eef : [0.054, 0.0, 0.018]
34 |
35 | #desired pose from end effector to grasp - [r, p, y]
36 | grasp_pose_to_eef_rotation : [0, 1.5708, 0] # 1.5707 = PI/2
37 |
38 | end_effector_parent_link: 'left_hand_grasping_frame'
39 |
40 |
--------------------------------------------------------------------------------
/launch/grasp_test.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
29 |
30 |
31 |
32 |
33 |
34 |
--------------------------------------------------------------------------------
/config/baxter_grasp_data.yaml:
--------------------------------------------------------------------------------
1 | base_link: 'base'
2 |
3 | # =====================================================
4 | left_hand:
5 | end_effector_name: 'left_hand' #ee group name
6 |
7 | #actuated joints in end effector
8 | joints : ['left_gripper_l_finger_joint']
9 |
10 | #open position
11 | pregrasp_posture : [0.0095]
12 | pregrasp_time_from_start : 4.0
13 |
14 | #close position
15 | grasp_posture : [-0.0125]
16 | grasp_time_from_start : 4.0
17 |
18 | #desired pose from end effector to grasp - [x,y,z]
19 | grasp_pose_to_eef : [-0.15, 0, 0]
20 |
21 | #desired pose from end effector to grasp - [r, p, y]
22 | grasp_pose_to_eef_rotation : [0, 1.5708, 0] # 1.5707 = PI/2
23 |
24 | end_effector_parent_link: 'left_wrist'
25 | # =====================================================
26 | right_hand:
27 | end_effector_name: 'right_hand' #ee group name
28 |
29 | #actuated joints in end effector
30 | joints : ['right_gripper_l_finger_joint']
31 |
32 | #open position
33 | pregrasp_posture : [0.0095]
34 | pregrasp_time_from_start : 4.0
35 |
36 | #close position
37 | grasp_posture : [-0.0125]
38 | grasp_time_from_start : 4.0
39 |
40 | #desired pose from end effector to grasp - [x,y,z]
41 | grasp_pose_to_eef : [-0.15, 0, 0]
42 |
43 | #desired pose from end effector to grasp - [r, p, y]
44 | grasp_pose_to_eef_rotation : [0, 1.5708, 0] # 1.5707 = PI/2
45 |
46 | end_effector_parent_link: 'right_wrist'
47 |
48 |
--------------------------------------------------------------------------------
/config/nao_grasp_data.yaml:
--------------------------------------------------------------------------------
1 | base_link: '/odom'
2 |
3 | # =====================================================
4 | left_hand:
5 | end_effector_name: 'left_hand' #ee group name
6 |
7 | #actuated joints in end effector
8 | joints : ['LHand']
9 |
10 | #open position
11 | pregrasp_posture : [0.0]
12 | pregrasp_time_from_start : 4.0
13 |
14 | #close position
15 | grasp_posture : [1.0]
16 | grasp_time_from_start : 4.0
17 |
18 | #desired pose from end effector to grasp - [x,y,z]
19 | #desired pose from end effector to grasp - [r, p, y]
20 |
21 | #side grasp -pi/4
22 | grasp_pose_to_eef : [-0.065, 0.015, -0.03]
23 | grasp_pose_to_eef_rotation : [-1.025, 0.0, 0.0]
24 |
25 | end_effector_parent_link: 'l_wrist'
26 | # =====================================================
27 | right_hand:
28 | end_effector_name: 'right_hand' #ee group name
29 |
30 | #actuated joints in end effector
31 | joints : ['RHand']
32 |
33 | #open position
34 | pregrasp_posture : [0.0]
35 | pregrasp_time_from_start : 4.0
36 |
37 | #close position
38 | grasp_posture : [1.0]
39 | grasp_time_from_start : 4.0
40 |
41 | #desired pose from end effector to grasp - [x,y,z]
42 | #desired pose from end effector to grasp - [r, p, y]
43 |
44 | #side grasp pi/4
45 | grasp_pose_to_eef : [-0.065, -0.015, -0.03]
46 | grasp_pose_to_eef_rotation : [1.025, 0.0, 0.0]
47 |
48 | end_effector_parent_link: 'r_wrist'
49 |
50 |
--------------------------------------------------------------------------------
/config/pepper_grasp_data.yaml:
--------------------------------------------------------------------------------
1 | base_link: '/odom'
2 |
3 | # =====================================================
4 | left_hand:
5 | end_effector_name: 'left_hand' #ee group name
6 |
7 | #actuated joints in end effector
8 | joints : ['LHand']
9 |
10 | #open position
11 | pregrasp_posture : [0.0] #for sim
12 | pregrasp_time_from_start : 4.0
13 |
14 | #close position
15 | grasp_posture : [1.0] #for sim
16 | grasp_time_from_start : 4.0
17 |
18 | #desired pose from end effector to grasp - [x,y,z]
19 | #desired pose from end effector to grasp - [r, p, y] #1.5707 = PI/2
20 | #side grasp -65deg
21 | grasp_pose_to_eef : [-0.09, 0.036, -0.02]
22 | grasp_pose_to_eef_rotation : [-1.22, 0.0, 0.0]
23 |
24 | end_effector_parent_link: 'l_wrist'
25 | # =====================================================
26 | right_hand:
27 | end_effector_name: 'right_hand' #ee group name
28 |
29 | #actuated joints in end effector
30 | joints : ['RHand']
31 |
32 | #open position
33 | pregrasp_posture : [0.0] #for sim
34 | pregrasp_time_from_start : 4.0
35 |
36 | #close position
37 | grasp_posture : [1.0] #for sim
38 | grasp_time_from_start : 4.0
39 |
40 | #desired pose from end effector to grasp - [x,y,z]
41 | #desired pose from end effector to grasp - [r, p, y]
42 | #side grasp 65deg
43 | grasp_pose_to_eef : [-0.09, -0.036, -0.02]
44 | grasp_pose_to_eef_rotation : [1.22, 0.0, 0.0]
45 |
46 | end_effector_parent_link: 'r_wrist'
47 |
48 |
--------------------------------------------------------------------------------
/package.xml:
--------------------------------------------------------------------------------
1 |
2 | moveit_simple_grasps
3 | 1.3.1
4 |
5 | A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline.
6 | Does not consider friction cones or other dynamics.
7 |
8 | Dave Coleman
9 |
10 | BSD
11 |
12 | https://github.com/davetcoleman/moveit_simple_grasps/
13 | https://github.com/davetcoleman/moveit_simple_grasps/issues
14 | https://github.com/davetcoleman/moveit_simple_grasps
15 |
16 | Dave Coleman
17 |
18 | catkin
19 |
20 | roscpp
21 | eigen_conversions
22 | std_msgs
23 | trajectory_msgs
24 | tf
25 | tf_conversions
26 | moveit_ros_planning
27 | moveit_ros_planning_interface
28 | moveit_core
29 | moveit_visual_tools
30 | message_generation
31 | actionlib
32 | moveit_msgs
33 | geometry_msgs
34 | actionlib_msgs
35 | cmake_modules
36 |
37 | std_msgs
38 | trajectory_msgs
39 | moveit_msgs
40 | geometry_msgs
41 | actionlib_msgs
42 | message_runtime
43 | moveit_visual_tools
44 |
45 |
46 |
--------------------------------------------------------------------------------
/.travis.yml:
--------------------------------------------------------------------------------
1 | language:
2 | - cpp
3 | - python
4 | python:
5 | - "2.7"
6 | compiler:
7 | - gcc
8 | before_install: # Use this to prepare the system to install prerequisites or dependencies
9 | # Define some config vars
10 | - export ROS_DISTRO=hydro
11 | - export CI_SOURCE_PATH=$(pwd)
12 | - echo "Testing branch $TRAVIS_BRANCH "
13 | - pwd
14 | - sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu precise main" > /etc/apt/sources.list.d/ros-latest.list'
15 | - wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
16 | - sudo apt-get update
17 | - sudo apt-get install -y python-catkin-pkg python-rosdep python-wstool ros-$ROS_DISTRO-roscpp
18 | # MongoDB fix - I don't fully understand this
19 | - sudo apt-get remove -y mongodb mongodb-10gen
20 | - sudo apt-get install -y mongodb-clients mongodb-server -o Dpkg::Options::="--force-confdef" # default actions
21 | # Setup rosdep
22 | - sudo rosdep init
23 | - rosdep update
24 | install: # Use this to install any prerequisites or dependencies necessary to run your build
25 | # Create workspace
26 | - mkdir -p ~/ros/ws_test/src
27 | - cd ~/ros/ws_test/src
28 | - git clone https://github.com/davetcoleman/moveit_visual_tools # temporary until hydro package is released
29 | - git clone https://github.com/davetcoleman/graph_msgs.git # temporary
30 | # Delete the baxter.rosinstall version of the repo and use the one of the branch we are testing
31 | - ln -s $CI_SOURCE_PATH . # Link the repo we are testing to the new workspace
32 | - cd ../
33 | # Test manual install
34 | #- sudo apt-get install ros-hydro-gazebo-ros ros-hydro-ros-controllers
35 | # Install dependencies for source repos
36 | - rosdep install --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
37 | before_script: # Use this to prepare your build for testing e.g. copy database configurations, environment variables, etc.
38 | - source /opt/ros/$ROS_DISTRO/setup.bash
39 | script: # All commands must exit with code 0 on success. Anything else is considered failure.
40 | - catkin_make DCMAKE_BUILD_TYPE=Debug -j1
41 | #- catkin_make_isolated --source . -j1 --cmake-args --install
42 |
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 2.8.3)
2 | project(moveit_simple_grasps)
3 |
4 | set_directory_properties(PROPERTIES COMPILE_OPTIONS "-std=c++11")
5 |
6 | # Load catkin and all dependencies required for this package
7 | find_package(catkin REQUIRED COMPONENTS
8 | roscpp
9 | std_msgs
10 | eigen_conversions
11 | moveit_ros_planning
12 | moveit_ros_planning_interface
13 | moveit_core
14 | moveit_visual_tools
15 | tf
16 | tf_conversions
17 | trajectory_msgs
18 | message_generation
19 | geometry_msgs
20 | actionlib
21 | actionlib_msgs
22 | moveit_msgs
23 | cmake_modules
24 | )
25 |
26 | find_package(Eigen REQUIRED)
27 | find_package(Boost REQUIRED thread system)
28 |
29 | add_message_files(DIRECTORY msg
30 | FILES
31 | GraspGeneratorOptions.msg
32 | )
33 |
34 | add_action_files(DIRECTORY action
35 | FILES
36 | GenerateGrasps.action
37 | )
38 |
39 | generate_messages(DEPENDENCIES
40 | geometry_msgs
41 | actionlib_msgs
42 | std_msgs
43 | moveit_msgs
44 | )
45 |
46 | # Catkin
47 | catkin_package(
48 | LIBRARIES
49 | ${PROJECT_NAME}
50 | ${PROJECT_NAME}_filter
51 | CATKIN_DEPENDS
52 | actionlib_msgs
53 | geometry_msgs
54 | moveit_msgs
55 | trajectory_msgs
56 | std_msgs
57 | message_runtime
58 | moveit_visual_tools
59 | INCLUDE_DIRS include
60 | )
61 |
62 | ## Build
63 | include_directories(
64 | include
65 | ${catkin_INCLUDE_DIRS}
66 | )
67 |
68 | # Grasp Generator Library
69 | add_library(${PROJECT_NAME}
70 | src/simple_grasps.cpp
71 | src/grasp_data.cpp
72 | )
73 | target_link_libraries(${PROJECT_NAME}
74 | ${catkin_LIBRARIES} ${Boost_LIBRARIES}
75 | )
76 |
77 | # Grasp Filter Library
78 | add_library(${PROJECT_NAME}_filter
79 | src/grasp_filter.cpp
80 | )
81 | target_link_libraries(${PROJECT_NAME}_filter
82 | ${catkin_LIBRARIES} ${Boost_LIBRARIES}
83 | )
84 |
85 | # Action Server executable
86 | add_executable(${PROJECT_NAME}_server src/simple_grasps_server.cpp)
87 | add_dependencies(${PROJECT_NAME}_server ${catkin_EXPORTED_TARGETS}) # don't build until necessary msgs are finish
88 | target_link_libraries(${PROJECT_NAME}_server
89 | ${PROJECT_NAME} ${catkin_LIBRARIES} ${Boost_LIBRARIES}
90 | )
91 |
92 | # Test filter executable
93 | add_executable(${PROJECT_NAME}_filter_test src/grasp_filter_test.cpp)
94 | target_link_libraries(${PROJECT_NAME}_filter_test
95 | ${PROJECT_NAME} ${PROJECT_NAME}_filter ${catkin_LIBRARIES} ${Boost_LIBRARIES}
96 | )
97 |
98 | # Test grasp executable
99 | add_executable(${PROJECT_NAME}_test src/simple_grasps_test.cpp)
100 | target_link_libraries(${PROJECT_NAME}_test
101 | ${PROJECT_NAME} ${catkin_LIBRARIES} ${Boost_LIBRARIES}
102 | )
103 |
104 | ## Install
105 |
106 | # Install libraries
107 | install(TARGETS
108 | ${PROJECT_NAME}
109 | ${PROJECT_NAME}_filter
110 | LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION})
111 |
112 | # Install header files
113 | install(DIRECTORY include/${PROJECT_NAME}/ DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION})
114 |
115 | # Install shared resources
116 | install(DIRECTORY launch DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION})
117 | install(DIRECTORY resources DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION})
118 |
119 | # Install executables
120 | install(TARGETS
121 | ${PROJECT_NAME}_server
122 | ${PROJECT_NAME}_test
123 | ${PROJECT_NAME}_filter_test
124 | LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
125 | RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
126 |
--------------------------------------------------------------------------------
/CHANGELOG.rst:
--------------------------------------------------------------------------------
1 | ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
2 | Changelog for package moveit_simple_grasps
3 | ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
4 |
5 | 1.3.1 (2015-12-07)
6 | ------------------
7 | * catkin lint cleanup
8 | * Contributors: Dave Coleman
9 |
10 | 1.3.0 (2015-12-05)
11 | ------------------
12 | * Z Axis implemented
13 | * Fixed API changes in moveit_visual_tools
14 | * Adding grasp configurations for Romeo, Nao and Pepper
15 | * Update README.md
16 | * Fix install space
17 | * New setRobotStatePreGrasp(), setRobotStateGrasp(), and setRobotState() functions for opening and closing EE
18 | * Fixed test launch
19 | * Added new test functions
20 | * Contributors: Dave Coleman, nlyubova, rheidrich
21 |
22 | 1.2.1 (2014-10-27)
23 | ------------------
24 | * Refactored for new moveit_visual_tools API
25 | * Fixed package.xml
26 | * Updated README
27 | * Contributors: Dave Coleman
28 |
29 | 1.2.0 (2014-09-19)
30 | ------------------
31 |
32 | 1.1.0 (2014-07-31)
33 | ------------------
34 | * Fixed grasp pose rotation
35 | * Created new verbose constructor flag to enable easy debugging
36 | * Allow a grasp pose to be rotated along z axis
37 | * Created new pick place pipeline template
38 | * Moved ClamArm config to this repo
39 | * Updated package description
40 | * Updated README
41 | * Contributors: Dave Coleman
42 |
43 | 1.0.1 (2014-05-30)
44 | ------------------
45 | * Moved base link out of individual end effector configurations
46 | * Fixed tests for new gripper config format
47 | * Fix for strict cppcheck and g++ warnings/errors
48 | * Remove self assignment
49 | * fix functions with no return statement and other cppcheck errors fix
50 | * Compatibility changes for ROS Indigo (Eigen find pkg)
51 | * Restored the lost grasp data for REEM
52 | * Renamed grasp data config file for REEM and updated launch file accordingly.
53 | * Fix lost contents of file and add left hand.
54 | * Enabled dual arm grasping, filtering
55 | * Fixes for more strict moveit_visual_tools data access
56 | * Deprecated function, made robot grasp config files have more than 1 end effector
57 | * Fixed posture bug and renamed local vars to not have _ postfix
58 | * Added ability to filter pre-grasps as well
59 | * Removed this-> because does not follow MoveIt style guidelines
60 | * Made tests left/right invariant
61 | * Refactored RobotGraspData and loader function
62 | * Renamed RobotGraspData to GraspData
63 | * Made graspDataLoader into a function the GraspData class.
64 | * Move grasp data struct to separate file
65 | * Fixed filter test
66 | * Created left hand config for baxter
67 | * Improved tests
68 | * Changed deprecated function name
69 | * Add options to grasp generation action goal.
70 | * Yaml conversion
71 | * Improved error handling of loading from yaml, removed unnecessary data
72 | * Fixes for new grasp data loader
73 | * Fixes per catkin_lintg
74 | * Convert baxter_data.h to baxter_gripper.yaml
75 | * Add launch script for grasp generator server + testing node
76 | * Replace reem_data.h with reem_hand.yaml
77 | * Add grasp_data_loader to be used by server.
78 | * Changed way visualizations are made
79 | * Moved the visualize grasp functionality to moveit_visual_tools. Deprecated generateAllGrasps
80 | * Fixed grasp filter bug of pose in wrong frame of reference
81 | * Trying to visualize arm reaches
82 | * Fixed grasp filter
83 | * Added new hand_roll feature
84 | * Changed name of moveit_simple_grasps
85 | * Renamed files and classes to not have the word MoveIt
86 | * Added picture
87 | * Added ability to do full grasp rotation, finer grained access, documentation
88 | * Fix travis
89 | * Changed name of moveit_visual_tools
90 | * Initial commit
91 | * Contributors: Bence Magyar, Dave Coleman, Jordi Pages
92 |
--------------------------------------------------------------------------------
/config/romeo_grasp_data.yaml:
--------------------------------------------------------------------------------
1 | base_link: '/odom'
2 |
3 | # =====================================================
4 | left_hand:
5 | end_effector_name: 'left_hand' #ee group name
6 |
7 | #actuated joints in end effector
8 | joints : ['LHand', 'LWristPitch']
9 |
10 | #open position
11 | #pregrasp_posture : [1.0, 0.0] #for the real robot
12 | pregrasp_posture : [0.0, 0.0] #for sim
13 | pregrasp_time_from_start : 4.0
14 |
15 | #close position
16 | #grasp_posture : [0.0, 0.0] #for the real robot
17 | grasp_posture : [1.0, 0.0] #for sim
18 | grasp_time_from_start : 4.0
19 |
20 | #desired pose from end effector to grasp - [x,y,z]
21 | #desired pose from end effector to grasp - [r, p, y] #1.5707 = PI/2
22 |
23 | #side grasp -pi/2
24 | #grasp_pose_to_eef : [-0.12, 0.045, 0.0]
25 | #grasp_pose_to_eef_rotation : [-1.5707, 0.0, 0.0]
26 | #side grasp -pi/3
27 | #grasp_pose_to_eef : [-0.1, 0.055, 0.0]
28 | #grasp_pose_to_eef_rotation : [-1.0472, 0.0, 0.0]
29 | #side grasp -pi/3 - best
30 | grasp_pose_to_eef : [-0.113, 0.036, 0.036]
31 | grasp_pose_to_eef_rotation : [-1.032, 0.0, 0.0]
32 | #side grasp -pi/4
33 | #grasp_pose_to_eef : [-0.1, 0.055, 0.0]
34 | #grasp_pose_to_eef_rotation : [-1.025, 0.0, 0.0]
35 | #front grasp
36 | #grasp_pose_to_eef : [-0.1, 0.07, -0.05]
37 | #grasp_pose_to_eef_rotation : [-0.7854, 0.0, 0.0]
38 |
39 | #top grasp pi/2
40 | #grasp_pose_to_eef : [-0.07, 0.0, 0.125]
41 | #grasp_pose_to_eef_rotation : [0, 1.5707, 0]
42 | #top grasp 0 deg
43 | #grasp_pose_to_eef : [-0.095, 0.0, 0.095]
44 | #grasp_pose_to_eef_rotation : [0, 0, 0]
45 | #top grasp 30 deg
46 | #grasp_pose_to_eef : [-0.095, 0.0, 0.11]
47 | #grasp_pose_to_eef_rotation : [0, 0.52, 0]
48 | #top grasp 35 deg
49 | #grasp_pose_to_eef : [-0.055, 0.0, 0.135]
50 | #grasp_pose_to_eef_rotation : [0, 0.61, 0]
51 | #top grasp 40 deg - best
52 | #grasp_pose_to_eef : [-0.03, 0.0, 0.145]
53 | #grasp_pose_to_eef_rotation : [0, 0.7, 0]
54 |
55 | end_effector_parent_link: 'LWristYaw_link'
56 | # =====================================================
57 | right_hand:
58 | end_effector_name: 'right_hand' #ee group name
59 |
60 | #actuated joints in end effector
61 | joints : ['RHand', 'RWristPitch']
62 |
63 | #open position
64 | #pregrasp_posture : [1.0, 0.0] #for the real robot
65 | pregrasp_posture : [0.0, 0.0] #for sim
66 | pregrasp_time_from_start : 4.0
67 |
68 | #close position
69 | #grasp_posture : [0.0, 0.0] #for the real robot
70 | grasp_posture : [1.0, 0.0] #for sim
71 | grasp_time_from_start : 4.0
72 |
73 | #desired pose from end effector to grasp - [x,y,z]
74 | #desired pose from end effector to grasp - [r, p, y]
75 |
76 | #side grasp pi/2
77 | #grasp_pose_to_eef : [-0.12, -0.045, 0.0]
78 | #grasp_pose_to_eef_rotation : [1.5707, 0.0, 0.0]
79 | #side grasp pi/3
80 | #grasp_pose_to_eef : [-0.1, -0.055, 0.0]
81 | #grasp_pose_to_eef_rotation : [1.0472, 0.0, 0.0]
82 | #side grasp pi/3 - best
83 | #grasp_pose_to_eef : [-0.113, -0.036, 0.036]
84 | #grasp_pose_to_eef_rotation : [1.032, 0.0, 0.0]
85 | #side grasp pi/4
86 | #grasp_pose_to_eef : [-0.1, -0.055, 0.0]
87 | #grasp_pose_to_eef_rotation : [1.025, 0.0, 0.0]
88 | #grasp pi * 2/3
89 | #grasp_pose_to_eef : [-0.1, 0.055, 0.0]
90 | #grasp_pose_to_eef_rotation : [-2.0944, 0.0, 0.0]
91 |
92 | #top grasp pi/2
93 | #grasp_pose_to_eef : [-0.07, 0.0, 0.125]
94 | #grasp_pose_to_eef_rotation : [0, 1.5707, 0]
95 | #top grasp 40 deg - best
96 | grasp_pose_to_eef : [-0.03, 0.0, 0.145]
97 | grasp_pose_to_eef_rotation : [0, 0.7, 0]
98 |
99 | end_effector_parent_link: 'RWristYaw_link'
100 |
101 |
--------------------------------------------------------------------------------
/scripts/server_test.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/python
2 | # Software License Agreement (BSD License)
3 | #
4 | # Copyright (c) 2014, PAL Robotics SL
5 | # All rights reserved.
6 | #
7 | # Redistribution and use in source and binary forms, with or without
8 | # modification, are permitted provided that the following conditions
9 | # are met:
10 | #
11 | # * Redistributions of source code must retain the above copyright
12 | # notice, this list of conditions and the following disclaimer.
13 | # * Redistributions in binary form must reproduce the above
14 | # copyright notice, this list of conditions and the following
15 | # disclaimer in the documentation and/or other materials provided
16 | # with the distribution.
17 | # * Neither the name of the PAL Robotics nor the names of its
18 | # contributors may be used to endorse or promote products derived
19 | # from this software without specific prior written permission.
20 | #
21 | # THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | # "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | # LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | # FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | # COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | # INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | # BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | # LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | # CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | # LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | # ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | # POSSIBILITY OF SUCH DAMAGE.
33 | #
34 | # author: Bence Magyar
35 |
36 | import rospy
37 | from actionlib import SimpleActionClient
38 | from geometry_msgs.msg import PoseArray, Pose, Point
39 | from std_msgs.msg import Header
40 | from moveit_simple_grasps.msg import GenerateGraspsAction, GenerateGraspsGoal
41 | from moveit_msgs.msg import Grasp
42 | import geometry_msgs
43 |
44 | grasp_publisher = None
45 | grasps_ac = None
46 |
47 | def generate_grasps(pose, width):
48 | #send request to block grasp generator service
49 | grasps_ac.wait_for_server()
50 | rospy.loginfo("Successfully connected.")
51 | goal = GenerateGraspsGoal()
52 | goal.pose = pose.pose
53 | goal.width = width
54 | grasps_ac.send_goal(goal)
55 | rospy.loginfo("Sent goal, waiting:\n" + str(goal))
56 | t_start = rospy.Time.now()
57 | grasps_ac.wait_for_result()
58 | t_end = rospy.Time.now()
59 | t_total = t_end - t_start
60 | rospy.loginfo("Result received in " + str(t_total.to_sec()))
61 | grasp_list = grasps_ac.get_result().grasps
62 | return grasp_list
63 |
64 | def publish_grasps_as_poses(grasps):
65 | rospy.loginfo("Publishing PoseArray on /grasp_pose_from_block_bla for grasp_pose")
66 | graspmsg = Grasp()
67 | grasp_PA = PoseArray()
68 | header = Header()
69 | header.frame_id = "base_link"
70 | header.stamp = rospy.Time.now()
71 | grasp_PA.header = header
72 | for graspmsg in grasps:
73 | p = Pose(graspmsg.grasp_pose.pose.position, graspmsg.grasp_pose.pose.orientation)
74 | grasp_PA.poses.append(p)
75 | grasp_publisher.publish(grasp_PA)
76 | rospy.loginfo('Published ' + str(len(grasp_PA.poses)) + ' poses')
77 | rospy.sleep(2)
78 |
79 |
80 | if __name__ == '__main__':
81 | name = 'grasp_object_server'
82 | rospy.init_node(name, anonymous=False)
83 | rospy.loginfo("Connecting to grasp generator AS")
84 | grasps_ac = SimpleActionClient('/moveit_simple_grasps_server/generate', GenerateGraspsAction)
85 | grasp_publisher = rospy.Publisher("generated_grasps", PoseArray)
86 | object_pose = geometry_msgs.msg.PoseStamped()
87 | object_pose.pose.position.x = 1.0
88 | object_pose.pose.position.y = 1.0
89 | object_pose.pose.position.z = 1.0
90 | object_pose.pose.orientation.w = 1.0
91 | object_pose.pose.orientation.x = 0.0
92 | object_pose.pose.orientation.y = 0.0
93 | object_pose.pose.orientation.z = 0.0
94 | grasp_list = generate_grasps(object_pose, 0.06)
95 | rospy.loginfo('Generated ' + str(len(grasp_list)) + ' grasps.')
96 | publish_grasps_as_poses(grasp_list)
97 | rospy.sleep(10.0)
98 |
--------------------------------------------------------------------------------
/include/moveit_simple_grasps/custom_environment2.h:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2013, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /* Author: Dave Coleman
36 | Desc: Custom environments for running MoveIt!
37 | */
38 |
39 | #include // simple tool for showing grasps
40 |
41 | #ifndef BAXTER_PICK_PLACE__CUSTOM_ENVIRONMENT_
42 | #define BAXTER_PICK_PLACE__CUSTOM_ENVIRONMENT_
43 |
44 | namespace baxter_pick_place
45 | {
46 |
47 | // environment
48 | static const std::string SUPPORT_SURFACE1_NAME = "monitor";
49 | static const std::string SUPPORT_SURFACE2_NAME = "desk";
50 | static const std::string SUPPORT_SURFACE3_NAME = "table";
51 | static const std::string WALL1_NAME = "back_wall";
52 | static const std::string WALL2_NAME = "right_wall";
53 | static const std::string WALL3_NAME = "left_wall";
54 |
55 | // table dimensions
56 | static const double TABLE_HEIGHT = 0.818;
57 |
58 | static const double TABLE_WIDTH = 0.87;
59 | static const double TABLE_DEPTH = 0.44;
60 | static const double TABLE_X = 0.83;
61 | static const double TABLE_Y = 0.15;
62 |
63 | // object dimensions
64 | static const double OBJECT_SIZE = 0.04;
65 |
66 | void createEnvironment(moveit_visual_tools::MoveItVisualToolsPtr visual_tools_)
67 | {
68 | visual_tools_->cleanupCO(SUPPORT_SURFACE1_NAME);
69 | visual_tools_->cleanupCO(SUPPORT_SURFACE2_NAME);
70 | visual_tools_->cleanupCO(WALL1_NAME);
71 | visual_tools_->cleanupCO(WALL2_NAME);
72 | visual_tools_->cleanupCO(WALL3_NAME);
73 |
74 | // --------------------------------------------------------------------------------------------
75 | // Add objects to scene
76 |
77 | // Walls x, y, angle, width, height, name
78 | visual_tools_->publishCollisionWall(-0.55, 0, 0, 2.2, 1.5, WALL1_NAME); // back wall
79 | visual_tools_->publishCollisionWall(0.05, -1.1, M_PI/2, 2.0, 1.5, WALL2_NAME); // baxter's right
80 | visual_tools_->publishCollisionWall(0.05, 1.1, M_PI/2, 2.0, 1.5, WALL3_NAME); // baxter's left
81 |
82 | // Tables x, y, z, angle, width, height, depth, name
83 | visual_tools_->publishCollisionTable(0.78, -0.8, 0, 0, 0.4, 1.4, 0.47, SUPPORT_SURFACE1_NAME); // computer monitor
84 | visual_tools_->publishCollisionTable(0.78, -0.45, 0, 0, 0.4, 0.7, 0.47, SUPPORT_SURFACE2_NAME); // my desk
85 | visual_tools_->publishCollisionTable(TABLE_X, TABLE_Y, 0, 0, TABLE_WIDTH, TABLE_HEIGHT, TABLE_DEPTH, SUPPORT_SURFACE3_NAME); // andy table
86 | }
87 |
88 | double getTableHeight(double floor_offset)
89 | {
90 | return TABLE_HEIGHT + floor_offset + OBJECT_SIZE / 2;
91 | }
92 |
93 | void getTableWidthRange(double &y_min, double &y_max)
94 | {
95 | y_min = TABLE_Y - TABLE_WIDTH / 2;
96 | y_max = TABLE_Y + TABLE_WIDTH / 2;
97 | }
98 |
99 | void getTableDepthRange(double &x_min, double &x_max)
100 | {
101 | x_min = TABLE_X - TABLE_DEPTH / 2;
102 | x_max = TABLE_X + TABLE_DEPTH / 2;
103 | }
104 |
105 | } // namespace
106 |
107 | #endif
108 |
--------------------------------------------------------------------------------
/include/moveit_simple_grasps/grasp_data.h:
--------------------------------------------------------------------------------
1 | /*
2 | * Software License Agreement (Modified BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder, PAL Robotics, S.L.
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of Univ of CO, Boulder, PAL Robotics, S.L.
18 | * nor the names of its contributors may be used to endorse or
19 | * promote products derived from this software without specific
20 | * prior written permission.
21 | *
22 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
23 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
24 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
25 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
26 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
27 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
28 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
29 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
30 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
31 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
32 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
33 | * POSSIBILITY OF SUCH DAMAGE.
34 | */
35 |
36 | /* Authors: Bence Magyar, Dave Coleman
37 | Description: Data class used by the grasp generator.
38 | */
39 |
40 | #ifndef MOVEIT_SIMPLE_GRASPS__GRASP_DATA_H_
41 | #define MOVEIT_SIMPLE_GRASPS__GRASP_DATA_H_
42 |
43 | // Ros
44 | #include
45 |
46 | // Msgs
47 | #include
48 | #include
49 | #include
50 |
51 | namespace moveit_simple_grasps
52 | {
53 |
54 | class GraspData
55 | {
56 | public:
57 | geometry_msgs::Pose grasp_pose_to_eef_pose_; // Convert generic grasp pose to this end effector's frame of reference
58 | trajectory_msgs::JointTrajectory pre_grasp_posture_; // when the end effector is in "open" position
59 | trajectory_msgs::JointTrajectory grasp_posture_; // when the end effector is in "close" position
60 | std::string base_link_; // name of global frame with z pointing up
61 | std::string ee_parent_link_; // the last link in the kinematic chain before the end effector, e.g. "/gripper_roll_link"
62 | std::string ee_group_; // the end effector name
63 | double grasp_depth_; // distance from center point of object to end effector
64 | int angle_resolution_; // generate grasps at PI/angle_resolution increments
65 | double approach_retreat_desired_dist_; // how far back from the grasp position the pregrasp phase should be
66 | double approach_retreat_min_dist_; // how far back from the grasp position the pregrasp phase should be at minimum
67 | double object_size_; // for visualization
68 |
69 | public:
70 |
71 | /**
72 | * \brief Constructor
73 | */
74 | GraspData();
75 |
76 | /**
77 | * \brief Loads grasp data from a yaml file (load from roslaunch)
78 | * \param node handle - allows for namespacing
79 | * \param end effector name - which side of a two handed robot to load data for. should correspond to SRDF EE names
80 | * \return true on success
81 | */
82 | bool loadRobotGraspData(const ros::NodeHandle& nh, const std::string& end_effector);
83 |
84 | /**
85 | * \brief Alter a robot state so that the end effector corresponding to this grasp data is in pre-grasp state (OPEN)
86 | * \param joint state of robot
87 | * \return true on success
88 | */
89 | bool setRobotStatePreGrasp( robot_state::RobotStatePtr &robot_state );
90 |
91 | /**
92 | * \brief Alter a robot state so that the end effector corresponding to this grasp data is in grasp state (CLOSED)
93 | * \param joint state of robot
94 | * \return true on success
95 | */
96 | bool setRobotStateGrasp( robot_state::RobotStatePtr &robot_state );
97 |
98 | /**
99 | * \brief Alter a robot state so that the end effector corresponding to this grasp data is in a grasp posture
100 | * \param joint state of robot
101 | * \param posture - what state to set the end effector
102 | * \return true on success
103 | */
104 | bool setRobotState( robot_state::RobotStatePtr &robot_state, const trajectory_msgs::JointTrajectory &posture );
105 |
106 | /**
107 | * \brief Debug data to console
108 | */
109 | void print();
110 | };
111 |
112 | } // namespace
113 |
114 | #endif
115 |
--------------------------------------------------------------------------------
/include/moveit_simple_grasps/grasp_filter.h:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2013, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | // Author: Dave Coleman
36 | // Desc: Filters grasps based on kinematic feasibility
37 |
38 | #ifndef MOVEIT_SIMPLE_GRASPS__GRASP_FILTER_
39 | #define MOVEIT_SIMPLE_GRASPS__GRASP_FILTER_
40 |
41 | // ROS
42 | #include
43 | #include
44 | #include
45 | #include
46 | #include
47 |
48 | // Grasping
49 | #include
50 |
51 | // Rviz
52 | #include
53 |
54 | // MoveIt
55 | #include
56 | #include
57 |
58 | // C++
59 | #include
60 | #include
61 | #define _USE_MATH_DEFINES
62 |
63 | namespace moveit_simple_grasps
64 | {
65 |
66 | // Struct for passing parameters to threads, for cleaner code
67 | struct IkThreadStruct
68 | {
69 | IkThreadStruct(
70 | std::vector &possible_grasps, // the input
71 | std::vector &filtered_grasps, // the result
72 | std::vector &ik_solutions, // the resulting solutions for each filtered grasp
73 | Eigen::Affine3d &link_transform,
74 | int grasps_id_start,
75 | int grasps_id_end,
76 | kinematics::KinematicsBaseConstPtr kin_solver,
77 | bool filter_pregrasp,
78 | std::string ee_parent_link,
79 | double timeout,
80 | boost::mutex *lock,
81 | int thread_id)
82 | : possible_grasps_(possible_grasps),
83 | filtered_grasps_(filtered_grasps),
84 | ik_solutions_(ik_solutions),
85 | link_transform_(link_transform),
86 | grasps_id_start_(grasps_id_start),
87 | grasps_id_end_(grasps_id_end),
88 | kin_solver_(kin_solver),
89 | filter_pregrasp_(filter_pregrasp),
90 | ee_parent_link_(ee_parent_link),
91 | timeout_(timeout),
92 | lock_(lock),
93 | thread_id_(thread_id)
94 | {
95 | }
96 | std::vector &possible_grasps_;
97 | std::vector &filtered_grasps_;
98 | std::vector &ik_solutions_;
99 | Eigen::Affine3d link_transform_;
100 | int grasps_id_start_;
101 | int grasps_id_end_;
102 | kinematics::KinematicsBaseConstPtr kin_solver_;
103 | bool filter_pregrasp_;
104 | std::string ee_parent_link_;
105 | double timeout_;
106 | boost::mutex *lock_;
107 | int thread_id_;
108 | };
109 |
110 |
111 | // Class
112 | class GraspFilter
113 | {
114 | private:
115 | // State of robot
116 | robot_state::RobotState robot_state_;
117 |
118 | // threaded kinematic solvers
119 | std::map > kin_solvers_;
120 |
121 | // class for publishing stuff to rviz
122 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
123 |
124 | bool verbose_;
125 |
126 | public:
127 |
128 | // Constructor
129 | GraspFilter( robot_state::RobotState robot_state,
130 | moveit_visual_tools::MoveItVisualToolsPtr& visual_tools );
131 |
132 | // Destructor
133 | ~GraspFilter();
134 |
135 | // Of an array of grasps, choose just one for use
136 | bool chooseBestGrasp( const std::vector& possible_grasps,
137 | moveit_msgs::Grasp& chosen );
138 |
139 | // Take the nth grasp from the array
140 | bool filterNthGrasp(std::vector& possible_grasps, int n);
141 |
142 | /**
143 | * \brief Choose the 1st grasp that is kinematically feasible
144 | * \param
145 | * \param
146 | * \param whether to also check ik feasibility for the pregrasp position
147 | * \return true on success
148 | */
149 | bool filterGrasps(std::vector& possible_grasps,
150 | std::vector& ik_solutions,
151 | bool filter_pregrasp, const std::string &ee_parent_link,
152 | const std::string& planning_group);
153 |
154 | private:
155 |
156 | /**
157 | * \brief Thread for checking part of the possible grasps list
158 | * \param
159 | */
160 | void filterGraspThread(IkThreadStruct ik_thread_struct);
161 |
162 |
163 | }; // end of class
164 |
165 | typedef boost::shared_ptr GraspFilterPtr;
166 | typedef boost::shared_ptr GraspFilterConstPtr;
167 |
168 | } // namespace
169 |
170 | #endif
171 |
--------------------------------------------------------------------------------
/include/moveit_simple_grasps/simple_grasps.h:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2013, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | // Author: Dave Coleman
36 | // Desc: Generates grasps for a cube
37 |
38 | #ifndef MOVEIT_SIMPLE_GRASPS__MOVEIT_SIMPLE_GRASPS_H_
39 | #define MOVEIT_SIMPLE_GRASPS__MOVEIT_SIMPLE_GRASPS_H_
40 |
41 | // ROS
42 | #include
43 |
44 | // TF
45 | #include
46 |
47 | // Msgs
48 | #include
49 |
50 | // MoveIt
51 | #include
52 | #include
53 |
54 | // Eigen
55 | #include
56 | #include
57 | #include
58 |
59 | // Visualization
60 | #include
61 |
62 | // C++
63 | #include
64 | #define _USE_MATH_DEFINES
65 |
66 | #include
67 |
68 | namespace moveit_simple_grasps
69 | {
70 |
71 | static const double RAD2DEG = 57.2957795;
72 |
73 | // Grasp axis orientation
74 | enum grasp_axis_t {X_AXIS, Y_AXIS, Z_AXIS};
75 | enum grasp_direction_t {UP, DOWN};
76 | enum grasp_rotation_t {FULL, HALF};
77 |
78 | // Class
79 | class SimpleGrasps
80 | {
81 | private:
82 |
83 | // class for publishing stuff to rviz
84 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
85 |
86 | // Transform from frame of box to global frame
87 | Eigen::Affine3d object_global_transform_;
88 |
89 | // Display more output both in console and in Rviz (with arrows and markers)
90 | bool verbose_;
91 |
92 | public:
93 | EIGEN_MAKE_ALIGNED_OPERATOR_NEW // Eigen requires 128-bit alignment for the Eigen::Vector2d's array (of 2 doubles). With GCC, this is done with a attribute ((aligned(16))).
94 |
95 | /**
96 | * \brief Constructor
97 | */
98 | SimpleGrasps(moveit_visual_tools::MoveItVisualToolsPtr rviz_tools, bool verbose = false);
99 |
100 | /**
101 | * \brief Destructor
102 | */
103 | ~SimpleGrasps();
104 |
105 | /**
106 | * \brief Moved to generateBlockGrasps
107 | */
108 | MOVEIT_DEPRECATED bool generateAllGrasps(const geometry_msgs::Pose& object_pose, const GraspData& grasp_data,
109 | std::vector& possible_grasps)
110 | {
111 | generateBlockGrasps(object_pose, grasp_data, possible_grasps);
112 |
113 | return true;
114 | }
115 |
116 | /**
117 | * \brief Create all possible grasp positions for a block
118 | * \param pose of block, where vector arrow is parallel to table plane
119 | * \param data describing end effector
120 | * \param resulting generated possible grasps
121 | * \return true if successful
122 | */
123 | bool generateBlockGrasps(const geometry_msgs::Pose& object_pose, const GraspData& grasp_data,
124 | std::vector& possible_grasps);
125 |
126 | /**
127 | * \brief Create grasp positions in one axis around a single pose
128 | * Note: to visualize these grasps use moveit_visual_tools.publishAnimatedGrasps() function or
129 | * moveit_visual_tools.publishIKSolutions() with the resulting data
130 | * \param pose - center point of object to be grasped
131 | * \param axis - axis relative to object pose to rotate generated grasps around
132 | * \param direction - a parallel gripper is typically symetric such that it can perform the same grasp
133 | * 180 degree around. this option allows to generate a flipped grasp pose
134 | * \param rotation - amount to rotate around the object - 180 or 360 degrees
135 | * \param hand_roll - amount in radians to roll wrist with respect to center point of object during grasp. use 0 by default
136 | * \param grasp_data - parameters specific to the robot geometry
137 | * \param possible_grasps - the output solution vector of possible grasps to attempt. ok if pre-populated
138 | * \return true if successful
139 | */
140 | bool generateAxisGrasps(
141 | const geometry_msgs::Pose& object_pose,
142 | grasp_axis_t axis,
143 | grasp_direction_t direction,
144 | grasp_rotation_t rotation,
145 | double hand_roll,
146 | const GraspData& grasp_data,
147 | std::vector& possible_grasps);
148 |
149 | /**
150 | * \brief Using an input grasp description, get the pregrasp pose
151 | * \param grasp description
152 | * \param name of parent link
153 | * \return pregrasp pose
154 | */
155 | static geometry_msgs::PoseStamped getPreGraspPose(const moveit_msgs::Grasp &grasp, const std::string &ee_parent_link);
156 |
157 | /**
158 | * \brief Print debug info
159 | * DEPRECATRED: moved to grasp_data.cpp
160 | */
161 | MOVEIT_DEPRECATED static void printObjectGraspData(const GraspData& data)
162 | {
163 | ROS_INFO_STREAM_NAMED("grasp","ROBOT GRASP DATA DEBUG OUTPUT ---------------------");
164 | ROS_INFO_STREAM_NAMED("grasp","Base Link: " << data.base_link_);
165 | ROS_INFO_STREAM_NAMED("grasp","EE Parent Link: " << data.ee_parent_link_);
166 | ROS_INFO_STREAM_NAMED("grasp","Grasp Depth: " << data.grasp_depth_);
167 | ROS_INFO_STREAM_NAMED("grasp","Angle Resolution: " << data.angle_resolution_);
168 | ROS_INFO_STREAM_NAMED("grasp","Approach Retreat Desired Dist: " << data.approach_retreat_desired_dist_);
169 | ROS_INFO_STREAM_NAMED("grasp","Approach Retreat Min Dist: " << data.approach_retreat_min_dist_);
170 | ROS_INFO_STREAM_NAMED("grasp","Pregrasp Posture: \n" << data.pre_grasp_posture_);
171 | ROS_INFO_STREAM_NAMED("grasp","Grasp Posture: \n" << data.grasp_posture_);
172 | ROS_INFO_STREAM_NAMED("grasp","---------------------------------------------------\n");
173 | }
174 |
175 | }; // end of class
176 |
177 | typedef boost::shared_ptr SimpleGraspsPtr;
178 | typedef boost::shared_ptr SimpleGraspsConstPtr;
179 |
180 | } // namespace
181 |
182 | #endif
183 |
--------------------------------------------------------------------------------
/src/simple_grasps_server.cpp:
--------------------------------------------------------------------------------
1 | /*
2 | * Software License Agreement (Modified BSD License)
3 | *
4 | * Copyright (c) 2013-2014, PAL Robotics, S.L.
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of PAL Robotics, S.L. nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | */
34 |
35 | /* Author: Bence Magyar
36 | Desc: Action server wrapper for object grasp generator. Currently only works for REEM robot,
37 | needs to be changed to work with yaml configuration file instead.
38 | */
39 |
40 | // ROS
41 | #include
42 | #include
43 | #include
44 |
45 | // Grasp generation
46 | #include
47 | #include
48 | #include
49 |
50 |
51 | // Baxter specific properties
52 | #include
53 | #include
54 |
55 | namespace moveit_simple_grasps
56 | {
57 |
58 | bool graspGeneratorOptions2Inner(
59 | const moveit_simple_grasps::GraspGeneratorOptions &options,
60 | grasp_axis_t &axis,
61 | grasp_direction_t &direction,
62 | grasp_rotation_t &rotation)
63 | {
64 | switch(options.grasp_axis)
65 | {
66 | case GraspGeneratorOptions::GRASP_AXIS_X:
67 | axis = X_AXIS;
68 | break;
69 | case GraspGeneratorOptions::GRASP_AXIS_Y:
70 | axis = Y_AXIS;
71 | break;
72 | case GraspGeneratorOptions::GRASP_AXIS_Z:
73 | axis = Z_AXIS;
74 | break;
75 | default:
76 | assert(false);
77 | break;
78 | }
79 |
80 | switch(options.grasp_direction)
81 | {
82 | case GraspGeneratorOptions::GRASP_DIRECTION_UP:
83 | direction = UP;
84 | break;
85 | case GraspGeneratorOptions::GRASP_DIRECTION_DOWN:
86 | direction = DOWN;
87 | break;
88 | default:
89 | assert(false);
90 | break;
91 | }
92 |
93 | switch(options.grasp_rotation)
94 | {
95 | case GraspGeneratorOptions::GRASP_ROTATION_FULL:
96 | rotation = FULL;
97 | break;
98 | case GraspGeneratorOptions::GRASP_ROTATION_HALF:
99 | rotation = HALF;
100 | break;
101 | default:
102 | assert(false);
103 | break;
104 | }
105 | return true;
106 | }
107 |
108 | class GraspGeneratorServer
109 | {
110 | private:
111 | // A shared node handle
112 | ros::NodeHandle nh_;
113 |
114 | // Action server
115 | actionlib::SimpleActionServer as_;
116 | moveit_simple_grasps::GenerateGraspsResult result_;
117 |
118 | // Grasp generator
119 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
120 |
121 | // class for publishing stuff to rviz
122 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
123 |
124 | // robot-specific data for generating grasps
125 | moveit_simple_grasps::GraspData grasp_data_;
126 |
127 | // which arm are we using
128 | std::string side_;
129 | std::string planning_group_name_;
130 |
131 | public:
132 |
133 | // Constructor
134 | GraspGeneratorServer(const std::string &name, const std::string &side)
135 | : nh_("~")
136 | , as_(nh_, name, boost::bind(&moveit_simple_grasps::GraspGeneratorServer::executeCB, this, _1), false)
137 | , side_(side)
138 | , planning_group_name_(side_+"_arm")
139 | {
140 | // ---------------------------------------------------------------------------------------------
141 | // Load grasp data specific to our robot
142 | if (!grasp_data_.loadRobotGraspData(nh_, side_))
143 | ros::shutdown();
144 |
145 | // ---------------------------------------------------------------------------------------------
146 | // Load the Robot Viz Tools for publishing to Rviz
147 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools(grasp_data_.base_link_));
148 | visual_tools_->setLifetime(120.0);
149 | const robot_model::JointModelGroup* ee_jmg = visual_tools_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
150 | visual_tools_->loadEEMarker(ee_jmg);
151 |
152 | // ---------------------------------------------------------------------------------------------
153 | // Load grasp generator
154 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
155 | as_.start();
156 | }
157 |
158 | void executeCB(const moveit_simple_grasps::GenerateGraspsGoalConstPtr &goal)
159 | {
160 | // ---------------------------------------------------------------------------------------------
161 | // Remove previous results
162 | result_.grasps.clear();
163 |
164 | // ---------------------------------------------------------------------------------------------
165 | // Set object width and generate grasps
166 | grasp_data_.object_size_ = goal->width;
167 |
168 | // Generate grasps for all options that were passed
169 | grasp_axis_t axis;
170 | grasp_direction_t direction;
171 | grasp_rotation_t rotation;
172 | for(size_t i=0; ioptions.size(); ++i)
173 | {
174 | graspGeneratorOptions2Inner(goal->options[i], axis, direction, rotation);
175 | simple_grasps_->generateAxisGrasps(goal->pose, axis, direction, rotation, 0, grasp_data_, result_.grasps);
176 | }
177 | // fallback behaviour, generate default grasps when no options were passed
178 | if(goal->options.empty())
179 | {
180 | simple_grasps_->generateBlockGrasps(goal->pose, grasp_data_, result_.grasps);
181 | }
182 |
183 | // ---------------------------------------------------------------------------------------------
184 | // Publish results
185 | as_.setSucceeded(result_);
186 | }
187 |
188 | };
189 | }
190 |
191 |
192 | int main(int argc, char *argv[])
193 | {
194 | ros::init(argc, argv, "grasp_generator_server");
195 | moveit_simple_grasps::GraspGeneratorServer grasp_generator_server("generate", "right");
196 | ros::spin();
197 | return 0;
198 | }
199 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # SUPPORT FOR THIS PACKAGE HAS ENDED
2 | Sorry, too many things to maintain. I'll still merge PRs and am happy to share maintainership of this package with someone interested.
3 |
4 | MoveIt! Simple Grasps
5 | ====================
6 |
7 | A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
8 |
9 | Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
10 |
11 | This package includes:
12 |
13 | - Simple pose-based grasp generator for a block
14 | - Separate grasp generators for custom objects such as rectanguar or cylindrical objects
15 | - Grasp filter
16 | - Test code and visualizations
17 |
18 | Developed by [Dave Coleman](http://dav.ee) at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
19 |
20 | 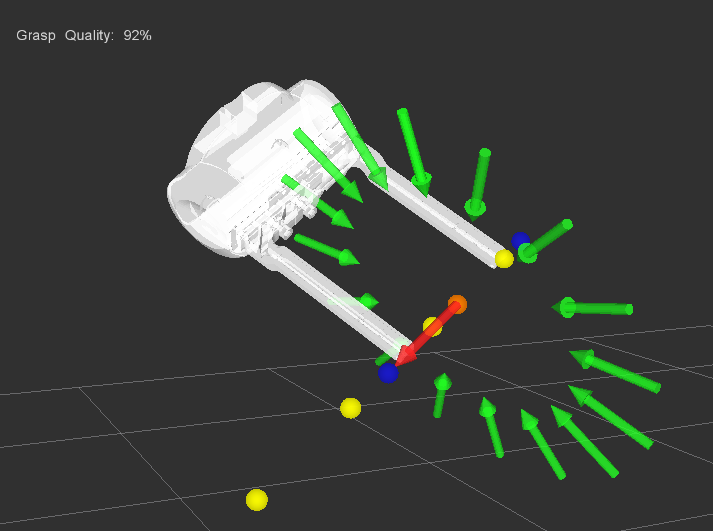 21 |
22 | ## Video Demo
23 |
24 | A simple demo with Baxter:
25 |
26 | [](https://www.youtube.com/watch?v=WEDITCR2qH4)
27 |
28 | ## Build Status
29 |
30 | [](https://travis-ci.org/davetcoleman/moveit_simple_grasps)
31 |
32 | ## Install
33 |
34 | ### Ubuntu Debian
35 |
36 | Hydro:
37 | ```
38 | sudo apt-get install ros-hydro-moveit-simple-grasps
39 | ```
40 | Indigo:
41 | ```
42 | sudo apt-get install ros-indigo-moveit-simple-grasps
43 | ```
44 |
45 | ### Install From Source
46 |
47 | Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
48 |
49 | Hydro:
50 | ```
51 | rosdep install --from-paths src --ignore-src --rosdistro hydro
52 | ```
53 | Indigo:
54 | ```
55 | rosdep install --from-paths src --ignore-src --rosdistro indigo
56 | ```
57 |
58 | ## Robot-Agnostic Configuration
59 |
60 | You will first need a configuration file that described your robot's end effector geometry. Currently an example format can be seen in this repository at [config/baxter_grasp_data.yaml](https://github.com/davetcoleman/moveit_simple_grasps/blob/hydro-devel/config/baxter_grasp_data.yaml). See the comments within that file for explanations.
61 |
62 | To load that file at launch, you copy the example in the file [launch/grasp_test.launch](https://github.com/davetcoleman/moveit_simple_grasps/blob/hydro-devel/launch/grasp_test.launch) where you should see the line ````.
63 |
64 | ## Code Usage
65 |
66 | Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
67 |
68 | We will discuss how to use the generation, filtering, and visualization components.
69 |
70 | Within your robot's ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
71 | ```
72 | // Grasp generation and visualization
73 | #include
74 | #include
75 | #include
76 | ```
77 |
78 | Add to your class's member variables the following:
79 | ```
80 | // Grasp generator
81 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
82 |
83 | // class for publishing stuff to rviz
84 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
85 |
86 | // robot-specific data for generating grasps
87 | moveit_simple_grasps::GraspData grasp_data_;
88 | ```
89 |
90 | In your class' constructor initialize the visualization tools;
91 | ```
92 | // Load the Robot Viz Tools for publishing to Rviz
93 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
94 | ```
95 | Change the first parameter of visual tools to the name of your robot's base link. For more information on that package, see [moveit_visual_tools](https://github.com/davetcoleman/moveit_visual_tools).
96 |
97 | Then load your robot's custom .yaml grasp data file:
98 | ```
99 | // Load grasp data specific to our robot
100 | ros::NodeHandle nh("~");
101 | if (!grasp_data_.loadRobotGraspData(nh, "left_hand"))
102 | ros::shutdown();
103 | ```
104 | Where "left_hand" is the name of one your SRDF-defined MoveIt! end effectors from the Setup Assistant. This data is loaded from a file that you must load to the parameter server within a roslaunch file, as desribed above.
105 |
106 | Now load grasp generator:
107 | ```
108 | // Load grasp generator
109 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
110 | ```
111 |
112 | To generate grasps, you first need the pose of the object you want to grasp, such as a block. Here's an example pose:
113 | ```
114 | geometry_msgs::Pose object_pose;
115 | object_pose.position.x = 0.4;
116 | object_pose.position.y = -0.2;
117 | object_pose.position.z = 0.0;
118 |
119 | // Orientation
120 | double angle = M_PI / 1.5;
121 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
122 | object_pose.orientation.x = quat.x();
123 | object_pose.orientation.y = quat.y();
124 | object_pose.orientation.z = quat.z();
125 | object_pose.orientation.w = quat.w();
126 | ```
127 |
128 | If you want to visualize this object pose as a block:
129 | ```
130 | visual_tools_->publishBlock(object_pose, rviz_visual_tools::BLUE, 0.04);
131 | ```
132 |
133 | Now generate the grasps:
134 | ```
135 | std::vector possible_grasps;
136 | simple_grasps_->generateBlockGrasps( object_pose, grasp_data_, possible_grasps);
137 | ```
138 |
139 | To visualize:
140 | ```
141 | visual_tools_->publishAnimatedGrasps(possible_grasps, grasp_data_.ee_parent_link_);
142 | ```
143 |
144 | ## Grasp Filter Usage
145 |
146 | This component creates several threads and tests a large number of potential grasps for kinematic feasibility.
147 |
148 |
21 |
22 | ## Video Demo
23 |
24 | A simple demo with Baxter:
25 |
26 | [](https://www.youtube.com/watch?v=WEDITCR2qH4)
27 |
28 | ## Build Status
29 |
30 | [](https://travis-ci.org/davetcoleman/moveit_simple_grasps)
31 |
32 | ## Install
33 |
34 | ### Ubuntu Debian
35 |
36 | Hydro:
37 | ```
38 | sudo apt-get install ros-hydro-moveit-simple-grasps
39 | ```
40 | Indigo:
41 | ```
42 | sudo apt-get install ros-indigo-moveit-simple-grasps
43 | ```
44 |
45 | ### Install From Source
46 |
47 | Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
48 |
49 | Hydro:
50 | ```
51 | rosdep install --from-paths src --ignore-src --rosdistro hydro
52 | ```
53 | Indigo:
54 | ```
55 | rosdep install --from-paths src --ignore-src --rosdistro indigo
56 | ```
57 |
58 | ## Robot-Agnostic Configuration
59 |
60 | You will first need a configuration file that described your robot's end effector geometry. Currently an example format can be seen in this repository at [config/baxter_grasp_data.yaml](https://github.com/davetcoleman/moveit_simple_grasps/blob/hydro-devel/config/baxter_grasp_data.yaml). See the comments within that file for explanations.
61 |
62 | To load that file at launch, you copy the example in the file [launch/grasp_test.launch](https://github.com/davetcoleman/moveit_simple_grasps/blob/hydro-devel/launch/grasp_test.launch) where you should see the line ````.
63 |
64 | ## Code Usage
65 |
66 | Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
67 |
68 | We will discuss how to use the generation, filtering, and visualization components.
69 |
70 | Within your robot's ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
71 | ```
72 | // Grasp generation and visualization
73 | #include
74 | #include
75 | #include
76 | ```
77 |
78 | Add to your class's member variables the following:
79 | ```
80 | // Grasp generator
81 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
82 |
83 | // class for publishing stuff to rviz
84 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
85 |
86 | // robot-specific data for generating grasps
87 | moveit_simple_grasps::GraspData grasp_data_;
88 | ```
89 |
90 | In your class' constructor initialize the visualization tools;
91 | ```
92 | // Load the Robot Viz Tools for publishing to Rviz
93 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
94 | ```
95 | Change the first parameter of visual tools to the name of your robot's base link. For more information on that package, see [moveit_visual_tools](https://github.com/davetcoleman/moveit_visual_tools).
96 |
97 | Then load your robot's custom .yaml grasp data file:
98 | ```
99 | // Load grasp data specific to our robot
100 | ros::NodeHandle nh("~");
101 | if (!grasp_data_.loadRobotGraspData(nh, "left_hand"))
102 | ros::shutdown();
103 | ```
104 | Where "left_hand" is the name of one your SRDF-defined MoveIt! end effectors from the Setup Assistant. This data is loaded from a file that you must load to the parameter server within a roslaunch file, as desribed above.
105 |
106 | Now load grasp generator:
107 | ```
108 | // Load grasp generator
109 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
110 | ```
111 |
112 | To generate grasps, you first need the pose of the object you want to grasp, such as a block. Here's an example pose:
113 | ```
114 | geometry_msgs::Pose object_pose;
115 | object_pose.position.x = 0.4;
116 | object_pose.position.y = -0.2;
117 | object_pose.position.z = 0.0;
118 |
119 | // Orientation
120 | double angle = M_PI / 1.5;
121 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
122 | object_pose.orientation.x = quat.x();
123 | object_pose.orientation.y = quat.y();
124 | object_pose.orientation.z = quat.z();
125 | object_pose.orientation.w = quat.w();
126 | ```
127 |
128 | If you want to visualize this object pose as a block:
129 | ```
130 | visual_tools_->publishBlock(object_pose, rviz_visual_tools::BLUE, 0.04);
131 | ```
132 |
133 | Now generate the grasps:
134 | ```
135 | std::vector possible_grasps;
136 | simple_grasps_->generateBlockGrasps( object_pose, grasp_data_, possible_grasps);
137 | ```
138 |
139 | To visualize:
140 | ```
141 | visual_tools_->publishAnimatedGrasps(possible_grasps, grasp_data_.ee_parent_link_);
142 | ```
143 |
144 | ## Grasp Filter Usage
145 |
146 | This component creates several threads and tests a large number of potential grasps for kinematic feasibility.
147 |
148 | 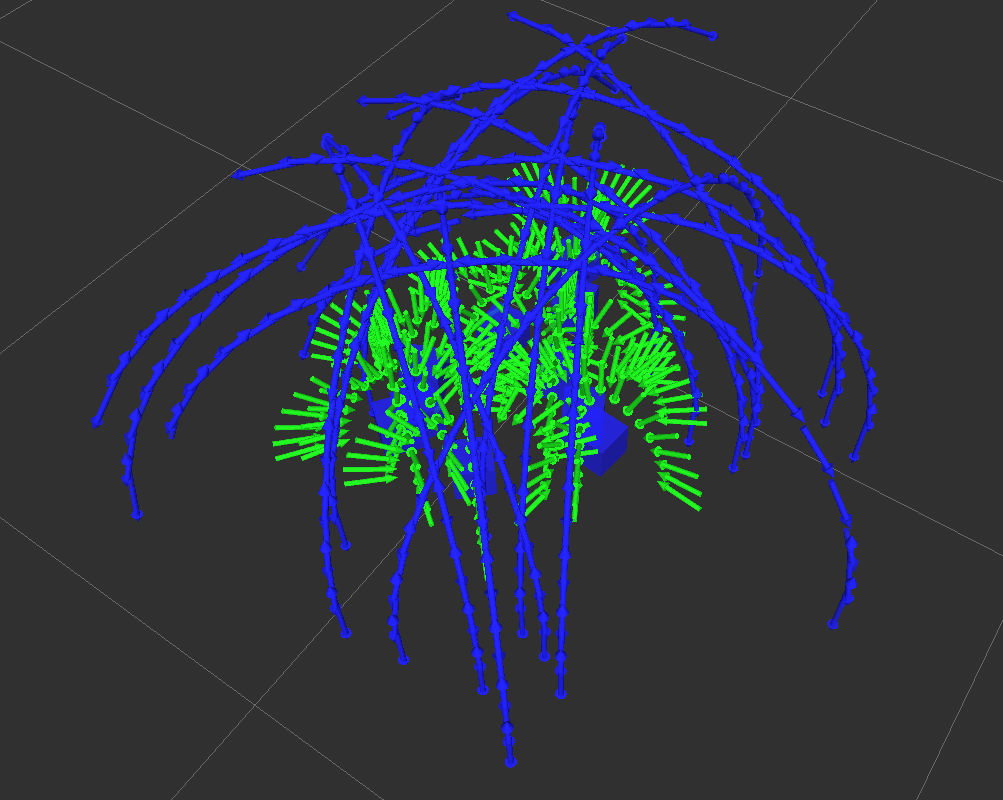 149 |
150 | To filter grasps after generating them:
151 | ```
152 | // Filter the grasp for only the ones that are reachable
153 | bool filter_pregrasps = true;
154 | std::vector ik_solutions; // save each grasps ik solution for visualization
155 | grasp_filter_->filterGrasps(possible_grasps, ik_solutions, filter_pregrasps, grasp_data_.ee_parent_link_, planning_group_name_);
156 | ```
157 |
158 | To view the filtered grasps along with the planning group pose:
159 | ```
160 | visual_tools_->publishIKSolutions(ik_solutions, planning_group_name_, 0.25);
161 | ```
162 |
163 | There is more that is undocumented but I'm tired of writing this.
164 |
165 | ## Tested Robots
166 |
167 | - [Baxter](https://github.com/davetcoleman/baxter_cpp)
168 | - [REEM](http://wiki.ros.org/Robots/REEM)
169 |
170 | ## Example Code
171 |
172 | A new (still in development) example tool is ``moveit_blocks.h`` located in the ``include`` folder. It gives you a complete pick and place pipeline using this package and MoveIt, and all you need is the appropriate config file and launch file. An example launch file can be found [here](https://github.com/davetcoleman/clam/blob/master/clam_pick_place/launch/pick_place.launch).
173 |
174 | There are currently example implementations:
175 |
176 | - [baxter_pick_place](https://github.com/davetcoleman/baxter_cpp/tree/hydro-devel/baxter_pick_place)
177 | - [reem_tabletop_grasping](https://github.com/pal-robotics/reem_tabletop_grasping)
178 | - [clam_pick_place](https://github.com/davetcoleman/clam/tree/master/clam_pick_place)
179 |
180 | ## Testing
181 |
182 | There are two tests scripts in this package. To view the tests, first start Rviz with:
183 |
184 | ```
185 | roslaunch moveit_simple_grasps grasp_test_rviz.launch
186 | ```
187 |
188 | To test just grasp generation for randomly placed blocks:
189 | ```
190 | roslaunch moveit_simple_grasps grasp_test.launch
191 | ```
192 |
193 | To also test the IK grasp filtering:
194 | ```
195 | roslaunch moveit_simple_grasps grasp_filter_test.launch
196 | ```
197 |
198 | ## TODO
199 |
200 | Features we'd like to see added to this project:
201 |
202 | - Ability to reason about any shape, not just centroid of a bounding box
203 | - Input arbitrary meshes
204 | - Auto create a bounding box around that mesh
205 | - Better reasoning about support surfaces (table)
206 | - Integrate collision checking to verify feasibility of grasp
207 | - Support non-parallel gripper end effectors
208 | - Make grasp quality metric better informed
209 | - Make this project easier to setup for new robots
210 | - Integrate into Setup Assistant GUI
211 | - Improve simple pick and place pipline header file
212 |
213 | ## Contributors
214 |
215 | - Dave Coleman, CU Boulder @davetcoleman
216 | - Bence Magyar, PAL Robotics @bmagyar
217 |
--------------------------------------------------------------------------------
/src/simple_grasps_test.cpp:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /* Author: Dave Coleman
36 | Desc: Tests the grasp generator
37 | */
38 |
39 | // ROS
40 | #include
41 | #include
42 | #include
43 | #include
44 |
45 | // Grasp generation
46 | #include
47 |
48 | // Baxter specific properties
49 | #include
50 |
51 | namespace baxter_pick_place
52 | {
53 |
54 | static const double BLOCK_SIZE = 0.04;
55 |
56 | class GraspGeneratorTest
57 | {
58 | private:
59 | // A shared node handle
60 | ros::NodeHandle nh_;
61 |
62 | // Grasp generator
63 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
64 |
65 | // class for publishing stuff to rviz
66 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
67 |
68 | // robot-specific data for generating grasps
69 | moveit_simple_grasps::GraspData grasp_data_;
70 |
71 | // which baxter arm are we using
72 | std::string arm_;
73 | std::string ee_group_name_;
74 | std::string planning_group_name_;
75 |
76 | public:
77 |
78 | // Constructor
79 | GraspGeneratorTest(int num_tests)
80 | : nh_("~")
81 | {
82 | nh_.param("arm", arm_, std::string("left"));
83 | nh_.param("ee_group_name", ee_group_name_, std::string(arm_ + "_hand"));
84 | planning_group_name_ = arm_ + "_arm";
85 |
86 | ROS_INFO_STREAM_NAMED("test","Arm: " << arm_);
87 | ROS_INFO_STREAM_NAMED("test","End Effector: " << ee_group_name_);
88 | ROS_INFO_STREAM_NAMED("test","Planning Group: " << planning_group_name_);
89 |
90 | // ---------------------------------------------------------------------------------------------
91 | // Load grasp data specific to our robot
92 | if (!grasp_data_.loadRobotGraspData(nh_, ee_group_name_))
93 | ros::shutdown();
94 |
95 | // ---------------------------------------------------------------------------------------------
96 | // Load the Robot Viz Tools for publishing to Rviz
97 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools(grasp_data_.base_link_));
98 | visual_tools_->setLifetime(120.0);
99 | visual_tools_->loadMarkerPub();
100 |
101 | // ---------------------------------------------------------------------------------------------
102 | // Load grasp generator
103 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
104 |
105 | geometry_msgs::Pose pose;
106 | visual_tools_->generateEmptyPose(pose);
107 |
108 | // ---------------------------------------------------------------------------------------------
109 | // Animate open and closing end effector
110 |
111 | for (std::size_t i = 0; i < 4; ++i)
112 | {
113 | // Test visualization of end effector in OPEN position
114 | grasp_data_.setRobotStatePreGrasp( visual_tools_->getSharedRobotState() );
115 | const robot_model::JointModelGroup* ee_jmg = visual_tools_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
116 | visual_tools_->loadEEMarker(ee_jmg);
117 | visual_tools_->publishEEMarkers(pose, ee_jmg, rviz_visual_tools::ORANGE, "test_eef");
118 | ros::Duration(1.0).sleep();
119 |
120 | // Test visualization of end effector in CLOSED position
121 | grasp_data_.setRobotStateGrasp( visual_tools_->getSharedRobotState() );
122 | visual_tools_->loadEEMarker(ee_jmg);
123 | visual_tools_->publishEEMarkers(pose, ee_jmg, rviz_visual_tools::GREEN, "test_eef");
124 | ros::Duration(1.0).sleep();
125 | }
126 |
127 | // ---------------------------------------------------------------------------------------------
128 | // Generate grasps for a bunch of random objects
129 | geometry_msgs::Pose object_pose;
130 | std::vector possible_grasps;
131 |
132 | // Loop
133 | int i = 0;
134 | while(ros::ok())
135 | {
136 | ROS_INFO_STREAM_NAMED("test","Adding random object " << i+1 << " of " << num_tests);
137 |
138 | // Remove randomness when we are only running one test
139 | if (num_tests == 1)
140 | generateTestObject(object_pose);
141 | else
142 | generateRandomObject(object_pose);
143 |
144 | // Show the block
145 | visual_tools_->publishCuboid(object_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
146 |
147 | possible_grasps.clear();
148 |
149 | // Generate set of grasps for one object
150 | simple_grasps_->generateBlockGrasps(object_pose, grasp_data_, possible_grasps);
151 |
152 | // Visualize them
153 | const robot_model::JointModelGroup* ee_jmg = visual_tools_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
154 | visual_tools_->publishAnimatedGrasps(possible_grasps, ee_jmg);
155 | //visual_tools_->publishGrasps(possible_grasps, grasp_data_.ee_parent_link_);
156 |
157 | // Test if done
158 | ++i;
159 | if( i >= num_tests )
160 | break;
161 | }
162 | }
163 |
164 | void generateTestObject(geometry_msgs::Pose& object_pose)
165 | {
166 | // Position
167 | geometry_msgs::Pose start_object_pose;
168 |
169 | start_object_pose.position.x = 0.4;
170 | start_object_pose.position.y = -0.2;
171 | start_object_pose.position.z = 0.0;
172 |
173 | // Orientation
174 | double angle = M_PI / 1.5;
175 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
176 | start_object_pose.orientation.x = quat.x();
177 | start_object_pose.orientation.y = quat.y();
178 | start_object_pose.orientation.z = quat.z();
179 | start_object_pose.orientation.w = quat.w();
180 |
181 | // Choose which object to test
182 | object_pose = start_object_pose;
183 |
184 | //visual_tools_->publishObject( object_pose, OBJECT_SIZE, true );
185 | }
186 |
187 | void generateRandomObject(geometry_msgs::Pose& object_pose)
188 | {
189 | // Position
190 | object_pose.position.x = fRand(0.1,0.9); //0.55);
191 | object_pose.position.y = fRand(-0.28,0.28);
192 | object_pose.position.z = 0.02;
193 |
194 | // Orientation
195 | double angle = M_PI * fRand(0.1,1);
196 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
197 | object_pose.orientation.x = quat.x();
198 | object_pose.orientation.y = quat.y();
199 | object_pose.orientation.z = quat.z();
200 | object_pose.orientation.w = quat.w();
201 | }
202 |
203 | double fRand(double fMin, double fMax)
204 | {
205 | double f = (double)rand() / RAND_MAX;
206 | return fMin + f * (fMax - fMin);
207 | }
208 |
209 | }; // end of class
210 |
211 | } // namespace
212 |
213 |
214 | int main(int argc, char *argv[])
215 | {
216 | int num_tests = 10;
217 | ros::init(argc, argv, "grasp_generator_test");
218 |
219 | ROS_INFO_STREAM_NAMED("main","Simple Grasps Test");
220 |
221 | ros::AsyncSpinner spinner(2);
222 | spinner.start();
223 |
224 | // Seed random
225 | srand(ros::Time::now().toSec());
226 |
227 | // Benchmark time
228 | ros::Time start_time;
229 | start_time = ros::Time::now();
230 |
231 | // Run Tests
232 | baxter_pick_place::GraspGeneratorTest tester(num_tests);
233 |
234 | // Benchmark time
235 | double duration = (ros::Time::now() - start_time).toNSec() * 1e-6;
236 | ROS_INFO_STREAM_NAMED("","Total time: " << duration);
237 | //std::cout << duration << "\t" << num_tests << std::endl;
238 |
239 | ros::Duration(1.0).sleep(); // let rviz markers finish publishing
240 |
241 | return 0;
242 | }
243 |
--------------------------------------------------------------------------------
/src/grasp_filter_test.cpp:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /* Author: Dave Coleman
36 | Desc: Tests the grasp generator filter
37 | */
38 |
39 | // ROS
40 | #include
41 | #include
42 | #include
43 | #include
44 | #include
45 |
46 | // MoveIt
47 | #include
48 | #include
49 | #include
50 | #include
51 | #include
52 | #include
53 | #include
54 |
55 | // Rviz
56 | #include
57 | #include
58 |
59 | // Grasp
60 | #include
61 | #include
62 | #include
63 |
64 | // Baxter specific properties
65 | #include
66 | #include
67 |
68 | namespace moveit_simple_grasps
69 | {
70 |
71 | // Table dimensions
72 | static const double TABLE_HEIGHT = .92;
73 | static const double TABLE_WIDTH = .85;
74 | static const double TABLE_DEPTH = .47;
75 | static const double TABLE_X = 0.66;
76 | static const double TABLE_Y = 0;
77 | static const double TABLE_Z = -0.9/2+0.01;
78 |
79 | static const double BLOCK_SIZE = 0.04;
80 |
81 | class GraspGeneratorTest
82 | {
83 | private:
84 | // A shared node handle
85 | ros::NodeHandle nh_;
86 |
87 | // Grasp generator
88 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
89 |
90 | // Tool for visualizing things in Rviz
91 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
92 |
93 | // Grasp filter
94 | moveit_simple_grasps::GraspFilterPtr grasp_filter_;
95 |
96 | // data for generating grasps
97 | moveit_simple_grasps::GraspData grasp_data_;
98 |
99 | // Shared planning scene (load once for everything)
100 | planning_scene_monitor::PlanningSceneMonitorPtr planning_scene_monitor_;
101 |
102 | // which baxter arm are we using
103 | std::string arm_;
104 | std::string ee_group_name_;
105 | std::string planning_group_name_;
106 |
107 | public:
108 |
109 | // Constructor
110 | GraspGeneratorTest(int num_tests)
111 | : nh_("~")
112 | {
113 | // Get arm info from param server
114 | nh_.param("arm", arm_, std::string("left"));
115 | nh_.param("ee_group_name", ee_group_name_, std::string(arm_ + "_hand"));
116 | planning_group_name_ = arm_ + "_arm";
117 |
118 | ROS_INFO_STREAM_NAMED("test","Arm: " << arm_);
119 | ROS_INFO_STREAM_NAMED("test","End Effector: " << ee_group_name_);
120 | ROS_INFO_STREAM_NAMED("test","Planning Group: " << planning_group_name_);
121 |
122 | // ---------------------------------------------------------------------------------------------
123 | // Load grasp data
124 | if (!grasp_data_.loadRobotGraspData(nh_, ee_group_name_))
125 | ros::shutdown();
126 |
127 | // ---------------------------------------------------------------------------------------------
128 | // Load planning scene to share
129 | planning_scene_monitor_.reset(new planning_scene_monitor::PlanningSceneMonitor("robot_description"));
130 |
131 | // ---------------------------------------------------------------------------------------------
132 | // Load the Robot Viz Tools for publishing to Rviz
133 | const robot_model::JointModelGroup* ee_jmg = planning_scene_monitor_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
134 |
135 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools(grasp_data_.base_link_, "/end_effector_marker", planning_scene_monitor_));
136 | visual_tools_->setLifetime(40.0);
137 | visual_tools_->loadEEMarker(ee_jmg);
138 | visual_tools_->setFloorToBaseHeight(-0.9);
139 |
140 | // Clear out old collision objects just because
141 | //visual_tools_->removeAllCollisionObjects();
142 |
143 | // Create a collision table for fun
144 | visual_tools_->publishCollisionTable(TABLE_X, TABLE_Y, 0, 0, TABLE_WIDTH, TABLE_HEIGHT, TABLE_DEPTH, "table");
145 |
146 | // ---------------------------------------------------------------------------------------------
147 | // Load grasp generator
148 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
149 |
150 | // ---------------------------------------------------------------------------------------------
151 | // Load grasp filter
152 | robot_state::RobotState robot_state = planning_scene_monitor_->getPlanningScene()->getCurrentState();
153 | grasp_filter_.reset(new moveit_simple_grasps::GraspFilter(robot_state, visual_tools_) );
154 |
155 | // ---------------------------------------------------------------------------------------------
156 | // Generate grasps for a bunch of random objects
157 | geometry_msgs::Pose object_pose;
158 | std::vector possible_grasps;
159 | std::vector ik_solutions; // save each grasps ik solution for visualization
160 |
161 | // Loop
162 | for (int i = 0; i < num_tests; ++i)
163 | {
164 | ROS_INFO_STREAM_NAMED("test","Adding random object " << i+1 << " of " << num_tests);
165 |
166 | // Remove randomness when we are only running one test
167 | if (num_tests == 1)
168 | generateTestObject(object_pose);
169 | else
170 | generateRandomObject(object_pose);
171 |
172 | // Show the block
173 | visual_tools_->publishCuboid(object_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
174 |
175 | possible_grasps.clear();
176 | ik_solutions.clear();
177 |
178 | // Generate set of grasps for one object
179 | simple_grasps_->generateBlockGrasps( object_pose, grasp_data_, possible_grasps);
180 |
181 | // Filter the grasp for only the ones that are reachable
182 | bool filter_pregrasps = true;
183 | grasp_filter_->filterGrasps(possible_grasps, ik_solutions, filter_pregrasps, grasp_data_.ee_parent_link_, planning_group_name_);
184 |
185 | // Visualize them
186 | visual_tools_->publishAnimatedGrasps(possible_grasps, ee_jmg);
187 | const robot_model::JointModelGroup* arm_jmg = planning_scene_monitor_->getRobotModel()->getJointModelGroup(planning_group_name_);
188 | visual_tools_->publishIKSolutions(ik_solutions, arm_jmg, 0.25);
189 |
190 | // Make sure ros is still going
191 | if(!ros::ok())
192 | break;
193 | }
194 |
195 |
196 | }
197 |
198 | void generateTestObject(geometry_msgs::Pose& object_pose)
199 | {
200 | // Position
201 | geometry_msgs::Pose start_object_pose;
202 | geometry_msgs::Pose end_object_pose;
203 |
204 | start_object_pose.position.x = 0.8;
205 | start_object_pose.position.y = -0.5;
206 | start_object_pose.position.z = 0.02;
207 |
208 | end_object_pose.position.x = 0.25;
209 | end_object_pose.position.y = 0.15;
210 | end_object_pose.position.z = 0.02;
211 |
212 | // Orientation
213 | double angle = M_PI / 1.5;
214 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
215 | start_object_pose.orientation.x = quat.x();
216 | start_object_pose.orientation.y = quat.y();
217 | start_object_pose.orientation.z = quat.z();
218 | start_object_pose.orientation.w = quat.w();
219 |
220 | angle = M_PI / 1.1;
221 | quat = Eigen::Quaterniond(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
222 | end_object_pose.orientation.x = quat.x();
223 | end_object_pose.orientation.y = quat.y();
224 | end_object_pose.orientation.z = quat.z();
225 | end_object_pose.orientation.w = quat.w();
226 |
227 | // Choose which object to test
228 | object_pose = start_object_pose;
229 | }
230 |
231 | void generateRandomObject(geometry_msgs::Pose& object_pose)
232 | {
233 | // Position
234 | object_pose.position.x = visual_tools_->dRand(0.7,TABLE_DEPTH);
235 | object_pose.position.y = visual_tools_->dRand(-TABLE_WIDTH/2,-0.1);
236 | object_pose.position.z = TABLE_Z + TABLE_HEIGHT / 2.0 + BLOCK_SIZE / 2.0;
237 |
238 | // Orientation
239 | double angle = M_PI * visual_tools_->dRand(0.1,1);
240 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
241 | object_pose.orientation.x = quat.x();
242 | object_pose.orientation.y = quat.y();
243 | object_pose.orientation.z = quat.z();
244 | object_pose.orientation.w = quat.w();
245 | }
246 |
247 | }; // end of class
248 |
249 | } // namespace
250 |
251 |
252 | int main(int argc, char *argv[])
253 | {
254 | int num_tests = 5;
255 |
256 | ros::init(argc, argv, "grasp_generator_test");
257 |
258 | // Allow the action server to recieve and send ros messages
259 | ros::AsyncSpinner spinner(2);
260 | spinner.start();
261 |
262 | // Check for verbose flag
263 | bool verbose = false;
264 | if (argc > 1)
265 | {
266 | for (std::size_t i = 0; i < argc; ++i)
267 | {
268 | if (strcmp(argv[i], "--verbose") == 0)
269 | {
270 | ROS_INFO_STREAM_NAMED("main","Running in VERBOSE mode (much slower)");
271 | verbose = true;
272 | }
273 | }
274 | }
275 |
276 | // Seed random
277 | srand(ros::Time::now().toSec());
278 |
279 | // Benchmark time
280 | ros::Time start_time;
281 | start_time = ros::Time::now();
282 |
283 | // Run Tests
284 | moveit_simple_grasps::GraspGeneratorTest tester(num_tests);
285 |
286 | // Benchmark time
287 | double duration = (ros::Time::now() - start_time).toNSec() * 1e-6;
288 | ROS_INFO_STREAM_NAMED("","Total time: " << duration);
289 | std::cout << duration << "\t" << num_tests << std::endl;
290 |
291 | ros::Duration(1.0).sleep(); // let rviz markers finish publishing
292 |
293 | return 0;
294 | }
295 |
--------------------------------------------------------------------------------
/src/grasp_filter.cpp:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2013, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | #include
36 | #include
37 |
38 | // Conversions
39 | #include // add to pkg TODO
40 |
41 | namespace moveit_simple_grasps
42 | {
43 |
44 | // Constructor
45 | GraspFilter::GraspFilter( robot_state::RobotState robot_state,
46 | moveit_visual_tools::MoveItVisualToolsPtr& visual_tools ):
47 | robot_state_(robot_state),
48 | visual_tools_(visual_tools),
49 | verbose_(false)
50 | {
51 | ROS_DEBUG_STREAM_NAMED("filter","Loaded simple grasp filter");
52 | }
53 |
54 | GraspFilter::~GraspFilter()
55 | {
56 | }
57 |
58 | bool GraspFilter::chooseBestGrasp( const std::vector& possible_grasps, moveit_msgs::Grasp& chosen )
59 | {
60 | // TODO: better logic here
61 | if( possible_grasps.empty() )
62 | {
63 | ROS_ERROR_NAMED("filter","There are no grasps to choose from");
64 | return false;
65 | }
66 | chosen = possible_grasps[0]; // just choose first one
67 | return true;
68 | }
69 |
70 | // Return grasps that are kinematically feasible
71 | bool GraspFilter::filterGrasps(std::vector& possible_grasps,
72 | std::vector& ik_solutions, bool filter_pregrasp,
73 | const std::string &ee_parent_link, const std::string& planning_group)
74 | {
75 | // -----------------------------------------------------------------------------------------------
76 | // Error check
77 | if( possible_grasps.empty() )
78 | {
79 | ROS_ERROR_NAMED("filter","Unable to filter grasps because vector is empty");
80 | return false;
81 | }
82 |
83 | // -----------------------------------------------------------------------------------------------
84 | // how many cores does this computer have and how many do we need?
85 | int num_threads = boost::thread::hardware_concurrency();
86 | if( num_threads > possible_grasps.size() )
87 | num_threads = possible_grasps.size();
88 |
89 | if(false)
90 | {
91 | num_threads = 1;
92 | ROS_WARN_STREAM_NAMED("grasp_filter","Using only " << num_threads << " threads");
93 | }
94 |
95 | // -----------------------------------------------------------------------------------------------
96 | // Get the solver timeout from kinematics.yaml
97 | double timeout = robot_state_.getRobotModel()->getJointModelGroup( planning_group )->getDefaultIKTimeout();
98 | timeout = 0.05;
99 | ROS_DEBUG_STREAM_NAMED("grasp_filter","Grasp filter IK timeout " << timeout);
100 |
101 | // -----------------------------------------------------------------------------------------------
102 | // Load kinematic solvers if not already loaded
103 | if( kin_solvers_[planning_group].size() != num_threads )
104 | {
105 | kin_solvers_[planning_group].clear();
106 |
107 | const robot_model::JointModelGroup* jmg = robot_state_.getRobotModel()->getJointModelGroup(planning_group);
108 |
109 | // Create an ik solver for every thread
110 | for (int i = 0; i < num_threads; ++i)
111 | {
112 | //ROS_INFO_STREAM_NAMED("filter","Creating ik solver " << i);
113 |
114 | kin_solvers_[planning_group].push_back(jmg->getSolverInstance());
115 |
116 | // Test to make sure we have a valid kinematics solver
117 | if( !kin_solvers_[planning_group][i] )
118 | {
119 | ROS_ERROR_STREAM_NAMED("grasp_filter","No kinematic solver found");
120 | return false;
121 | }
122 | }
123 | }
124 |
125 | // Transform poses -------------------------------------------------------------------------------
126 | // bring the pose to the frame of the IK solver
127 | const std::string &ik_frame = kin_solvers_[planning_group][0]->getBaseFrame();
128 | Eigen::Affine3d link_transform;
129 | if (!moveit::core::Transforms::sameFrame(ik_frame, robot_state_.getRobotModel()->getModelFrame()))
130 | {
131 | const robot_model::LinkModel *lm = robot_state_.getLinkModel((!ik_frame.empty() && ik_frame[0] == '/') ? ik_frame.substr(1) : ik_frame);
132 | if (!lm)
133 | return false;
134 | //pose = getGlobalLinkTransform(lm).inverse() * pose;
135 | link_transform = robot_state_.getGlobalLinkTransform(lm).inverse();
136 | }
137 |
138 | // Benchmark time
139 | ros::Time start_time;
140 | start_time = ros::Time::now();
141 |
142 | // -----------------------------------------------------------------------------------------------
143 | // Loop through poses and find those that are kinematically feasible
144 | std::vector filtered_grasps;
145 |
146 | boost::thread_group bgroup; // create a group of threads
147 | boost::mutex lock; // used for sharing the same data structures
148 |
149 | ROS_INFO_STREAM_NAMED("filter", "Filtering possible grasps with " << num_threads << " threads");
150 |
151 | // split up the work between threads
152 | double num_grasps_per_thread = double(possible_grasps.size()) / num_threads;
153 | //ROS_INFO_STREAM("total grasps " << possible_grasps.size() << " per thead: " << num_grasps_per_thread);
154 |
155 | int grasps_id_start;
156 | int grasps_id_end = 0;
157 |
158 | for(int i = 0; i < num_threads; ++i)
159 | {
160 | grasps_id_start = grasps_id_end;
161 | grasps_id_end = ceil(num_grasps_per_thread*(i+1));
162 | if( grasps_id_end >= possible_grasps.size() )
163 | grasps_id_end = possible_grasps.size();
164 | //ROS_INFO_STREAM_NAMED("filter","low " << grasps_id_start << " high " << grasps_id_end);
165 |
166 | IkThreadStruct tc(possible_grasps, filtered_grasps, ik_solutions, link_transform, grasps_id_start,
167 | grasps_id_end, kin_solvers_[planning_group][i], filter_pregrasp, ee_parent_link, timeout, &lock, i);
168 | bgroup.create_thread( boost::bind( &GraspFilter::filterGraspThread, this, tc ) );
169 | }
170 |
171 | ROS_DEBUG_STREAM_NAMED("filter","Waiting to join " << num_threads << " ik threads...");
172 | bgroup.join_all(); // wait for all threads to finish
173 |
174 | ROS_INFO_STREAM_NAMED("filter", "Grasp filter complete, found " << filtered_grasps.size() << " IK solutions out of " <<
175 | possible_grasps.size() );
176 |
177 | possible_grasps = filtered_grasps;
178 |
179 | if (verbose_)
180 | {
181 | // End Benchmark time
182 | double duration = (ros::Time::now() - start_time).toNSec() * 1e-6;
183 | ROS_INFO_STREAM_NAMED("filter","Grasp generator IK grasp filtering benchmark time:");
184 | std::cout << duration << "\t" << possible_grasps.size() << "\n";
185 |
186 | ROS_INFO_STREAM_NAMED("filter","Possible grasps filtered to " << possible_grasps.size() << " options.");
187 | }
188 |
189 | return true;
190 | }
191 |
192 | void GraspFilter::filterGraspThread(IkThreadStruct ik_thread_struct)
193 | {
194 | // Seed state - start at zero
195 | std::vector ik_seed_state(7); // fill with zeros
196 | // TODO do not assume 7 dof
197 |
198 | std::vector solution;
199 | moveit_msgs::MoveItErrorCodes error_code;
200 | geometry_msgs::PoseStamped ik_pose;
201 |
202 | // Process the assigned grasps
203 | for( int i = ik_thread_struct.grasps_id_start_; i < ik_thread_struct.grasps_id_end_; ++i )
204 | {
205 | //ROS_DEBUG_STREAM_NAMED("filter", "Checking grasp #" << i);
206 |
207 | // Clear out previous solution just in case - not sure if this is needed
208 | solution.clear();
209 |
210 | // Transform current pose to frame of planning group
211 | ik_pose = ik_thread_struct.possible_grasps_[i].grasp_pose;
212 | Eigen::Affine3d eigen_pose;
213 | tf::poseMsgToEigen(ik_pose.pose, eigen_pose);
214 | eigen_pose = ik_thread_struct.link_transform_ * eigen_pose;
215 | tf::poseEigenToMsg(eigen_pose, ik_pose.pose);
216 |
217 | // Test it with IK
218 | ik_thread_struct.kin_solver_->
219 | searchPositionIK(ik_pose.pose, ik_seed_state, ik_thread_struct.timeout_, solution, error_code);
220 |
221 | // Results
222 | if( error_code.val == moveit_msgs::MoveItErrorCodes::SUCCESS )
223 | {
224 | //ROS_INFO_STREAM_NAMED("filter","Found IK Solution");
225 |
226 | // Copy solution to seed state so that next solution is faster
227 | ik_seed_state = solution;
228 |
229 | // Start pre-grasp section ----------------------------------------------------------
230 | if (ik_thread_struct.filter_pregrasp_) // optionally check the pregrasp
231 | {
232 | // Convert to a pre-grasp
233 | ik_pose = SimpleGrasps::getPreGraspPose(ik_thread_struct.possible_grasps_[i], ik_thread_struct.ee_parent_link_);
234 |
235 | // Transform current pose to frame of planning group
236 | Eigen::Affine3d eigen_pose;
237 | tf::poseMsgToEigen(ik_pose.pose, eigen_pose);
238 | eigen_pose = ik_thread_struct.link_transform_ * eigen_pose;
239 | tf::poseEigenToMsg(eigen_pose, ik_pose.pose);
240 |
241 | // Test it with IK
242 | ik_thread_struct.kin_solver_->
243 | searchPositionIK(ik_pose.pose, ik_seed_state, ik_thread_struct.timeout_, solution, error_code);
244 |
245 | // Results
246 | if( error_code.val == moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION )
247 | {
248 | ROS_WARN_STREAM_NAMED("filter","Unable to find IK solution for pre-grasp pose.");
249 | continue;
250 | }
251 | else if( error_code.val == moveit_msgs::MoveItErrorCodes::TIMED_OUT )
252 | {
253 | //ROS_DEBUG_STREAM_NAMED("filter","Unable to find IK solution for pre-grasp pose: Timed Out.");
254 | continue;
255 | }
256 | else if( error_code.val != moveit_msgs::MoveItErrorCodes::SUCCESS )
257 | {
258 | ROS_INFO_STREAM_NAMED("filter","IK solution error for pre-grasp: MoveItErrorCodes.msg = " << error_code);
259 | continue;
260 | }
261 | }
262 | // Both grasp and pre-grasp have passed
263 | // Lock the result vector so we can add to it for a second
264 | {
265 | boost::mutex::scoped_lock slock(*ik_thread_struct.lock_);
266 | ik_thread_struct.filtered_grasps_.push_back( ik_thread_struct.possible_grasps_[i] );
267 |
268 | trajectory_msgs::JointTrajectoryPoint point;
269 | //point.positions = ik_seed_state; // show the grasp solution
270 | point.positions = solution; // show the pre-grasp solution
271 |
272 | // Copy solution so that we can optionally use it later
273 | ik_thread_struct.ik_solutions_.push_back(point);
274 | }
275 |
276 | // End pre-grasp section -------------------------------------------------------
277 | }
278 | else if( error_code.val == moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION )
279 | ROS_WARN_STREAM_NAMED("filter","Unable to find IK solution for pose.");
280 | else if( error_code.val == moveit_msgs::MoveItErrorCodes::TIMED_OUT )
281 | {
282 | //ROS_DEBUG_STREAM_NAMED("filter","Unable to find IK solution for pose: Timed Out.");
283 | }
284 | else
285 | ROS_INFO_STREAM_NAMED("filter","IK solution error: MoveItErrorCodes.msg = " << error_code);
286 | }
287 |
288 | //ROS_DEBUG_STREAM_NAMED("filter","Thread " << ik_thread_struct.thread_id_ << " finished");
289 | }
290 |
291 | } // namespace
292 |
--------------------------------------------------------------------------------
/src/grasp_data.cpp:
--------------------------------------------------------------------------------
1 | /*
2 | * Software License Agreement (Modified BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder, PAL Robotics, S.L.
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of Univ of CO, Boulder, PAL Robotics, S.L.
18 | * nor the names of its contributors may be used to endorse or
19 | * promote products derived from this software without specific
20 | * prior written permission.
21 | *
22 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
23 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
24 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
25 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
26 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
27 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
28 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
29 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
30 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
31 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
32 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
33 | * POSSIBILITY OF SUCH DAMAGE.
34 | */
35 |
36 | /* Authors: Bence Magyar, Dave Coleman
37 | Description: Data class used by the grasp generator.
38 | */
39 |
40 | #include
41 |
42 | // Eigen
43 | #include
44 | #include
45 | #include
46 |
47 | // C++
48 | #include
49 | #define _USE_MATH_DEFINES
50 |
51 | namespace moveit_simple_grasps
52 | {
53 | GraspData::GraspData() :
54 | // Fill in default values where possible:
55 | base_link_("/base_link"),
56 | grasp_depth_(0.12),
57 | angle_resolution_(16),
58 | approach_retreat_desired_dist_(0.6),
59 | approach_retreat_min_dist_(0.4),
60 | object_size_(0.04)
61 | {}
62 |
63 | bool GraspData::loadRobotGraspData(const ros::NodeHandle& nh, const std::string& end_effector)
64 | {
65 | std::vector joint_names;
66 | std::vector pre_grasp_posture; // todo: remove all underscore post-fixes
67 | std::vector grasp_posture;
68 | std::vector grasp_pose_to_eef;
69 | std::vector grasp_pose_to_eef_rotation;
70 | double pregrasp_time_from_start;
71 | double grasp_time_from_start;
72 | std::string end_effector_name;
73 | std::string end_effector_parent_link;
74 |
75 | // Load a param
76 | if (!nh.hasParam("base_link"))
77 | {
78 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `base_link` missing from rosparam server. Did you load your end effector's configuration yaml file? Searching in namespace: " << nh.getNamespace());
79 | return false;
80 | }
81 | nh.getParam("base_link", base_link_);
82 |
83 | // Search within the sub-namespace of this end effector name
84 | ros::NodeHandle child_nh(nh, end_effector);
85 |
86 | // Load a param
87 | if (!child_nh.hasParam("pregrasp_time_from_start"))
88 | {
89 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `pregrasp_time_from_start` missing from rosparam server. Did you load your end effector's configuration yaml file? Searching in namespace: " << child_nh.getNamespace());
90 | return false;
91 | }
92 | child_nh.getParam("pregrasp_time_from_start", pregrasp_time_from_start);
93 |
94 | // Load a param
95 | if (!child_nh.hasParam("grasp_time_from_start"))
96 | {
97 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `grasp_time_from_start` missing from rosparam server. Did you load your end effector's configuration yaml file?");
98 | return false;
99 | }
100 | child_nh.getParam("grasp_time_from_start", grasp_time_from_start);
101 |
102 | // Load a param
103 | if (!child_nh.hasParam("end_effector_name"))
104 | {
105 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `end_effector_name` missing from rosparam server. Did you load your end effector's configuration yaml file?");
106 | return false;
107 | }
108 | child_nh.getParam("end_effector_name", end_effector_name);
109 |
110 | // Load a param
111 | if (!child_nh.hasParam("end_effector_parent_link"))
112 | {
113 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `end_effector_parent_link` missing from rosparam server. Did you load your end effector's configuration yaml file?");
114 | return false;
115 | }
116 | child_nh.getParam("end_effector_parent_link", end_effector_parent_link);
117 |
118 | // Load a param
119 | if (!child_nh.hasParam("joints"))
120 | {
121 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `joints` missing from rosparam server. Did you load your end effector's configuration yaml file?");
122 | return false;
123 | }
124 | XmlRpc::XmlRpcValue joint_list;
125 | child_nh.getParam("joints", joint_list);
126 | if (joint_list.getType() == XmlRpc::XmlRpcValue::TypeArray)
127 | for (int32_t i = 0; i < joint_list.size(); ++i)
128 | {
129 | ROS_ASSERT(joint_list[i].getType() == XmlRpc::XmlRpcValue::TypeString);
130 | joint_names.push_back(static_cast(joint_list[i]));
131 | }
132 | else
133 | ROS_ERROR_STREAM_NAMED("temp","joint list type is not type array???");
134 |
135 | if(child_nh.hasParam("pregrasp_posture"))
136 | {
137 | XmlRpc::XmlRpcValue preg_posture_list;
138 | child_nh.getParam("pregrasp_posture", preg_posture_list);
139 | ROS_ASSERT(preg_posture_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
140 | for (int32_t i = 0; i < preg_posture_list.size(); ++i)
141 | {
142 | ROS_ASSERT(preg_posture_list[i].getType() == XmlRpc::XmlRpcValue::TypeDouble);
143 | pre_grasp_posture.push_back(static_cast(preg_posture_list[i]));
144 | }
145 | }
146 |
147 | ROS_ASSERT(child_nh.hasParam("grasp_posture"));
148 | XmlRpc::XmlRpcValue grasp_posture_list;
149 | child_nh.getParam("grasp_posture", grasp_posture_list);
150 | ROS_ASSERT(grasp_posture_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
151 | for (int32_t i = 0; i < grasp_posture_list.size(); ++i)
152 | {
153 | ROS_ASSERT(grasp_posture_list[i].getType() == XmlRpc::XmlRpcValue::TypeDouble);
154 | grasp_posture.push_back(static_cast(grasp_posture_list[i]));
155 | }
156 |
157 | ROS_ASSERT(child_nh.hasParam("grasp_pose_to_eef"));
158 | XmlRpc::XmlRpcValue g_to_eef_list;
159 | child_nh.getParam("grasp_pose_to_eef", g_to_eef_list);
160 | ROS_ASSERT(g_to_eef_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
161 | for (int32_t i = 0; i < g_to_eef_list.size(); ++i)
162 | {
163 | // Cast to double OR int
164 | if (g_to_eef_list[i].getType() != XmlRpc::XmlRpcValue::TypeDouble)
165 | {
166 | if (g_to_eef_list[i].getType() != XmlRpc::XmlRpcValue::TypeInt )
167 | {
168 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `grasp_pose_to_eef` wrong data type - int or double required.");
169 | return false;
170 | }
171 | else
172 | grasp_pose_to_eef.push_back(static_cast(g_to_eef_list[i]));
173 | }
174 | else
175 | grasp_pose_to_eef.push_back(static_cast(g_to_eef_list[i]));
176 | }
177 |
178 | ROS_ASSERT(child_nh.hasParam("grasp_pose_to_eef_rotation"));
179 | XmlRpc::XmlRpcValue g_to_eef_rotation_list;
180 | child_nh.getParam("grasp_pose_to_eef_rotation", g_to_eef_rotation_list);
181 | ROS_ASSERT(g_to_eef_rotation_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
182 | for (int32_t i = 0; i < g_to_eef_rotation_list.size(); ++i)
183 | {
184 | // Cast to double OR int
185 | if (g_to_eef_rotation_list[i].getType() != XmlRpc::XmlRpcValue::TypeDouble)
186 | {
187 | if (g_to_eef_rotation_list[i].getType() != XmlRpc::XmlRpcValue::TypeInt )
188 | {
189 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `grasp_pose_to_eef_rotation` wrong data type - int or double required.");
190 | return false;
191 | }
192 | else
193 | grasp_pose_to_eef_rotation.push_back(static_cast(g_to_eef_rotation_list[i]));
194 | }
195 | else
196 | grasp_pose_to_eef_rotation.push_back(static_cast(g_to_eef_rotation_list[i]));
197 | }
198 |
199 | // -------------------------------
200 | // Convert generic grasp pose to this end effector's frame of reference, approach direction for short
201 |
202 | // Orientation
203 | ROS_ASSERT(grasp_pose_to_eef_rotation.size() == 3);
204 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(grasp_pose_to_eef_rotation[1]), Eigen::Vector3d::UnitY())); // turn on Z axis
205 | // TODO: rotate for roll and yaw also, not just pitch (unit y)
206 | // but i don't need that feature right now and it might be tricky
207 | grasp_pose_to_eef_pose_.orientation.x = quat.x();
208 | grasp_pose_to_eef_pose_.orientation.y = quat.y();
209 | grasp_pose_to_eef_pose_.orientation.z = quat.z();
210 | grasp_pose_to_eef_pose_.orientation.w = quat.w();
211 |
212 | // Position // approach vector?
213 | ROS_ASSERT(grasp_pose_to_eef.size() == 3);
214 | grasp_pose_to_eef_pose_.position.x = grasp_pose_to_eef[0];
215 | grasp_pose_to_eef_pose_.position.y = grasp_pose_to_eef[1];
216 | grasp_pose_to_eef_pose_.position.z = grasp_pose_to_eef[2];
217 |
218 | // -------------------------------
219 | // Create pre-grasp posture if specified
220 | if(!pre_grasp_posture.empty())
221 | {
222 | pre_grasp_posture_.header.frame_id = base_link_;
223 | pre_grasp_posture_.header.stamp = ros::Time::now();
224 | // Name of joints:
225 | pre_grasp_posture_.joint_names = joint_names;
226 | // Position of joints
227 | pre_grasp_posture_.points.resize(1);
228 | pre_grasp_posture_.points[0].positions = pre_grasp_posture;
229 | pre_grasp_posture_.points[0].time_from_start = ros::Duration(pregrasp_time_from_start);
230 | }
231 | // -------------------------------
232 | // Create grasp posture
233 | grasp_posture_.header.frame_id = base_link_;
234 | grasp_posture_.header.stamp = ros::Time::now();
235 | // Name of joints:
236 | grasp_posture_.joint_names = joint_names;
237 | // Position of joints
238 | grasp_posture_.points.resize(1);
239 | grasp_posture_.points[0].positions = grasp_posture;
240 | grasp_posture_.points[0].time_from_start = ros::Duration(grasp_time_from_start);
241 |
242 | // -------------------------------
243 | // SRDF Info
244 | ee_parent_link_ = end_effector_parent_link;
245 | ee_group_ = end_effector_name;
246 |
247 | // -------------------------------
248 | // Nums
249 | approach_retreat_desired_dist_ = 0.2; // 0.3;
250 | approach_retreat_min_dist_ = 0.06;
251 | // distance from center point of object to end effector
252 | grasp_depth_ = 0.06;// in negative or 0 this makes the grasps on the other side of the object! (like from below)
253 |
254 | // generate grasps at PI/angle_resolution increments
255 | angle_resolution_ = 16; //TODO parametrize this, or move to action interface
256 |
257 | // Debug
258 | //moveit_simple_grasps::SimpleGrasps::printObjectGraspData(grasp_data);
259 |
260 | return true;
261 | }
262 |
263 | bool GraspData::setRobotStatePreGrasp( robot_state::RobotStatePtr &robot_state )
264 | {
265 | return setRobotState( robot_state, pre_grasp_posture_ );
266 | }
267 | bool GraspData::setRobotStateGrasp( robot_state::RobotStatePtr &robot_state )
268 | {
269 | return setRobotState( robot_state, grasp_posture_ );
270 | }
271 |
272 | bool GraspData::setRobotState( robot_state::RobotStatePtr &robot_state, const trajectory_msgs::JointTrajectory &posture )
273 | {
274 | // Do for every joint in end effector
275 | for (std::size_t i = 0; i < posture.joint_names.size(); ++i)
276 | {
277 | // Debug
278 | std::cout << "Setting joint " << posture.joint_names[i] << " to value "
279 | << posture.points[i].positions[0] << std::endl;
280 |
281 | // Set joint position
282 | robot_state->setJointPositions( posture.joint_names[i],
283 | posture.points[i].positions );
284 | }
285 | }
286 |
287 | void GraspData::print()
288 | {
289 | ROS_WARN_STREAM_NAMED("grasp_data","Debug Grasp Data variable values:");
290 | std::cout << "grasp_pose_to_eef_pose_: \n" <
36 |
37 | namespace moveit_simple_grasps
38 | {
39 |
40 | // Constructor
41 | SimpleGrasps::SimpleGrasps(moveit_visual_tools::MoveItVisualToolsPtr visual_tools, bool verbose) :
42 | visual_tools_(visual_tools),
43 | verbose_(verbose)
44 | {
45 | ROS_DEBUG_STREAM_NAMED("grasps","Loaded simple grasp generator");
46 | }
47 |
48 | // Deconstructor
49 | SimpleGrasps::~SimpleGrasps()
50 | {
51 | }
52 |
53 | // Create all possible grasp positions for a object
54 | bool SimpleGrasps::generateBlockGrasps(const geometry_msgs::Pose& object_pose, const GraspData& grasp_data,
55 | std::vector& possible_grasps)
56 | {
57 | // ---------------------------------------------------------------------------------------------
58 | // Calculate grasps in two axis in both directions
59 | generateAxisGrasps( object_pose, X_AXIS, DOWN, HALF, 0, grasp_data, possible_grasps); // got no grasps with this alone
60 | generateAxisGrasps( object_pose, X_AXIS, UP, HALF, 0, grasp_data, possible_grasps); // gives some grasps... looks ugly
61 | generateAxisGrasps( object_pose, Y_AXIS, DOWN, HALF, 0, grasp_data, possible_grasps); // GOOD ONES!
62 | generateAxisGrasps( object_pose, Y_AXIS, UP, HALF, 0, grasp_data, possible_grasps); // gave a grasp from top... bad
63 |
64 | return true;
65 | }
66 |
67 | // Create grasp positions in one axis
68 | bool SimpleGrasps::generateAxisGrasps(
69 | const geometry_msgs::Pose& object_pose,
70 | grasp_axis_t axis,
71 | grasp_direction_t direction,
72 | grasp_rotation_t rotation,
73 | double hand_roll,
74 | const GraspData& grasp_data,
75 | std::vector& possible_grasps)
76 | {
77 | // ---------------------------------------------------------------------------------------------
78 | // Create a transform from the object's frame (center of object) to /base_link
79 | tf::poseMsgToEigen(object_pose, object_global_transform_);
80 |
81 | // ---------------------------------------------------------------------------------------------
82 | // Grasp parameters
83 |
84 | // Create re-usable approach motion
85 | moveit_msgs::GripperTranslation pre_grasp_approach;
86 | pre_grasp_approach.direction.header.stamp = ros::Time::now();
87 | pre_grasp_approach.desired_distance = grasp_data.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
88 | pre_grasp_approach.min_distance = grasp_data.approach_retreat_min_dist_; // half of the desired? Untested.
89 |
90 | // Create re-usable retreat motion
91 | moveit_msgs::GripperTranslation post_grasp_retreat;
92 | post_grasp_retreat.direction.header.stamp = ros::Time::now();
93 | post_grasp_retreat.desired_distance = grasp_data.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
94 | post_grasp_retreat.min_distance = grasp_data.approach_retreat_min_dist_; // half of the desired? Untested.
95 |
96 | // Create re-usable blank pose
97 | geometry_msgs::PoseStamped grasp_pose_msg;
98 | grasp_pose_msg.header.stamp = ros::Time::now();
99 | grasp_pose_msg.header.frame_id = grasp_data.base_link_;
100 |
101 | // ---------------------------------------------------------------------------------------------
102 | // Angle calculations
103 | double radius = grasp_data.grasp_depth_; //0.12
104 | double xb;
105 | double yb = 0.0; // stay in the y plane of the object
106 | double zb;
107 | double theta1 = 0.0; // Where the point is located around the object
108 | double theta2 = 0.0; // UP 'direction'
109 |
110 | // Gripper direction (UP/DOWN) rotation. UP set by default
111 | if( direction == DOWN )
112 | {
113 | theta2 = M_PI;
114 | }
115 |
116 | // ---------------------------------------------------------------------------------------------
117 | // ---------------------------------------------------------------------------------------------
118 | // Begin Grasp Generator Loop
119 | // ---------------------------------------------------------------------------------------------
120 | // ---------------------------------------------------------------------------------------------
121 |
122 | /* Developer Note:
123 | * Create angles 180 degrees around the chosen axis at given resolution
124 | * We create the grasps in the reference frame of the object, then later convert it to the base link
125 | */
126 | for(int i = 0; i <= grasp_data.angle_resolution_; ++i)
127 | {
128 | // Create a Grasp message
129 | moveit_msgs::Grasp new_grasp;
130 |
131 | // Calculate grasp pose
132 | xb = radius*cos(theta1);
133 | zb = radius*sin(theta1);
134 |
135 | Eigen::Affine3d grasp_pose;
136 |
137 | switch(axis)
138 | {
139 | case X_AXIS:
140 | grasp_pose = Eigen::AngleAxisd(theta1, Eigen::Vector3d::UnitX())
141 | * Eigen::AngleAxisd(-0.5*M_PI, Eigen::Vector3d::UnitZ())
142 | * Eigen::AngleAxisd(theta2, Eigen::Vector3d::UnitX()); // Flip 'direction'
143 |
144 | grasp_pose.translation() = Eigen::Vector3d( yb, xb ,zb);
145 |
146 | break;
147 | case Y_AXIS:
148 | grasp_pose =
149 | Eigen::AngleAxisd(M_PI - theta1, Eigen::Vector3d::UnitY())
150 | *Eigen::AngleAxisd(theta2, Eigen::Vector3d::UnitX()); // Flip 'direction'
151 |
152 | grasp_pose.translation() = Eigen::Vector3d( xb, yb ,zb);
153 |
154 | break;
155 | case Z_AXIS:
156 | grasp_pose =
157 | Eigen::AngleAxisd(M_PI - theta1, Eigen::Vector3d::UnitZ())
158 | *Eigen::AngleAxisd(theta2, Eigen::Vector3d::UnitX()); // Flip 'direction'
159 |
160 | grasp_pose.translation() = Eigen::Vector3d( xb, yb ,zb);
161 |
162 | break;
163 | }
164 |
165 | /* The estimated probability of success for this grasp, or some other measure of how "good" it is.
166 | * Here we base bias the score based on how far the wrist is from the surface, preferring a greater
167 | * distance to prevent wrist/end effector collision with the table
168 | */
169 | double score = sin(theta1);
170 | new_grasp.grasp_quality = std::max(score,0.1); // don't allow score to drop below 0.1 b/c all grasps are ok
171 |
172 | // Calculate the theta1 for next time
173 | if (rotation == HALF)
174 | theta1 += M_PI / grasp_data.angle_resolution_;
175 | else
176 | {
177 | theta1 += 2*M_PI / grasp_data.angle_resolution_;
178 | }
179 |
180 | // A name for this grasp
181 | static int grasp_id = 0;
182 | new_grasp.id = "Grasp" + boost::lexical_cast(grasp_id);
183 | ++grasp_id;
184 |
185 | // PreGrasp and Grasp Postures --------------------------------------------------------------------------
186 |
187 | // The internal posture of the hand for the pre-grasp only positions are used
188 | new_grasp.pre_grasp_posture = grasp_data.pre_grasp_posture_;
189 |
190 | // The internal posture of the hand for the grasp positions and efforts are used
191 | new_grasp.grasp_posture = grasp_data.grasp_posture_;
192 |
193 | // Grasp ------------------------------------------------------------------------------------------------
194 |
195 |
196 | // DEBUG - show original grasp pose before tranform to gripper frame
197 | if( verbose_ )
198 | {
199 | tf::poseEigenToMsg(object_global_transform_ * grasp_pose, grasp_pose_msg.pose);
200 | visual_tools_->publishArrow(grasp_pose_msg.pose, rviz_visual_tools::GREEN);
201 | }
202 |
203 | // ------------------------------------------------------------------------
204 | // Optionally roll wrist with respect to object pose
205 | Eigen::Affine3d roll_gripper;
206 | roll_gripper = Eigen::AngleAxisd(hand_roll, Eigen::Vector3d::UnitX());
207 | grasp_pose = grasp_pose * roll_gripper;
208 |
209 | // ------------------------------------------------------------------------
210 | // Change grasp to frame of reference of this custom end effector
211 |
212 | // Convert to Eigen
213 | Eigen::Affine3d eef_conversion_pose;
214 | tf::poseMsgToEigen(grasp_data.grasp_pose_to_eef_pose_, eef_conversion_pose);
215 |
216 | // Transform the grasp pose
217 | grasp_pose = grasp_pose * eef_conversion_pose;
218 |
219 | // ------------------------------------------------------------------------
220 | // Convert pose to global frame (base_link)
221 | tf::poseEigenToMsg(object_global_transform_ * grasp_pose, grasp_pose_msg.pose);
222 |
223 | // The position of the end-effector for the grasp relative to a reference frame (that is always specified elsewhere, not in this message)
224 | new_grasp.grasp_pose = grasp_pose_msg;
225 |
226 | // Other ------------------------------------------------------------------------------------------------
227 |
228 | // the maximum contact force to use while grasping (<=0 to disable)
229 | new_grasp.max_contact_force = 0;
230 |
231 | // -------------------------------------------------------------------------------------------------------
232 | // -------------------------------------------------------------------------------------------------------
233 | // Approach and retreat
234 | // -------------------------------------------------------------------------------------------------------
235 | // -------------------------------------------------------------------------------------------------------
236 |
237 | // Straight down ---------------------------------------------------------------------------------------
238 | // With respect to the base link/world frame
239 |
240 | // Approach
241 | pre_grasp_approach.direction.header.frame_id = grasp_data.base_link_;
242 | pre_grasp_approach.direction.vector.x = 0;
243 | pre_grasp_approach.direction.vector.y = 0;
244 | pre_grasp_approach.direction.vector.z = -1; // Approach direction (negative z axis) // TODO: document this assumption
245 | new_grasp.pre_grasp_approach = pre_grasp_approach;
246 |
247 | // Retreat
248 | post_grasp_retreat.direction.header.frame_id = grasp_data.base_link_;
249 | post_grasp_retreat.direction.vector.x = 0;
250 | post_grasp_retreat.direction.vector.y = 0;
251 | post_grasp_retreat.direction.vector.z = 1; // Retreat direction (pos z axis)
252 | new_grasp.post_grasp_retreat = post_grasp_retreat;
253 |
254 | // Add to vector
255 | possible_grasps.push_back(new_grasp);
256 |
257 | // Angled with pose -------------------------------------------------------------------------------------
258 | // Approach with respect to end effector orientation
259 |
260 | // Approach
261 | pre_grasp_approach.direction.header.frame_id = grasp_data.ee_parent_link_;
262 | pre_grasp_approach.direction.vector.x = 0;
263 | pre_grasp_approach.direction.vector.y = 0;
264 | pre_grasp_approach.direction.vector.z = 1;
265 | new_grasp.pre_grasp_approach = pre_grasp_approach;
266 |
267 | // Retreat
268 | post_grasp_retreat.direction.header.frame_id = grasp_data.ee_parent_link_;
269 | post_grasp_retreat.direction.vector.x = 0;
270 | post_grasp_retreat.direction.vector.y = 0;
271 | post_grasp_retreat.direction.vector.z = -1;
272 | new_grasp.post_grasp_retreat = post_grasp_retreat;
273 |
274 | // Add to vector
275 | possible_grasps.push_back(new_grasp);
276 |
277 | }
278 |
279 | ROS_INFO_STREAM_NAMED("grasp", "Generated " << possible_grasps.size() << " grasps." );
280 |
281 | return true;
282 | }
283 |
284 | geometry_msgs::PoseStamped SimpleGrasps::getPreGraspPose(const moveit_msgs::Grasp &grasp, const std::string &ee_parent_link)
285 | {
286 | // Grasp Pose Variables
287 | geometry_msgs::PoseStamped grasp_pose = grasp.grasp_pose;
288 | Eigen::Affine3d grasp_pose_eigen;
289 | tf::poseMsgToEigen(grasp_pose.pose, grasp_pose_eigen);
290 |
291 | // Get pre-grasp pose first
292 | geometry_msgs::PoseStamped pre_grasp_pose;
293 | Eigen::Affine3d pre_grasp_pose_eigen = grasp_pose_eigen; // Copy original grasp pose to pre-grasp pose
294 |
295 | // Approach direction variables
296 | Eigen::Vector3d pre_grasp_approach_direction_local;
297 |
298 | // The direction of the pre-grasp
299 | // Calculate the current animation position based on the percent
300 | Eigen::Vector3d pre_grasp_approach_direction = Eigen::Vector3d(
301 | -1 * grasp.pre_grasp_approach.direction.vector.x * grasp.pre_grasp_approach.desired_distance,
302 | -1 * grasp.pre_grasp_approach.direction.vector.y * grasp.pre_grasp_approach.desired_distance,
303 | -1 * grasp.pre_grasp_approach.direction.vector.z * grasp.pre_grasp_approach.desired_distance
304 | );
305 |
306 | // Decide if we need to change the approach_direction to the local frame of the end effector orientation
307 | if( grasp.pre_grasp_approach.direction.header.frame_id == ee_parent_link )
308 | {
309 | // Apply/compute the approach_direction vector in the local frame of the grasp_pose orientation
310 | pre_grasp_approach_direction_local = grasp_pose_eigen.rotation() * pre_grasp_approach_direction;
311 | }
312 | else
313 | {
314 | pre_grasp_approach_direction_local = pre_grasp_approach_direction; //grasp_pose_eigen.rotation() * pre_grasp_approach_direction;
315 | }
316 |
317 | // Update the grasp matrix usign the new locally-framed approach_direction
318 | pre_grasp_pose_eigen.translation() += pre_grasp_approach_direction_local;
319 |
320 | // Convert eigen pre-grasp position back to regular message
321 | tf::poseEigenToMsg(pre_grasp_pose_eigen, pre_grasp_pose.pose);
322 |
323 | // Copy original header to new grasp
324 | pre_grasp_pose.header = grasp_pose.header;
325 |
326 | return pre_grasp_pose;
327 | }
328 |
329 |
330 |
331 | } // namespace
332 |
--------------------------------------------------------------------------------
/include/moveit_simple_grasps/moveit_blocks.h:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2014, CU Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of CU Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /**
36 | * \brief Simple pick place for blocks
37 | * \author Dave Coleman
38 | */
39 |
40 | // ROS
41 | #include
42 |
43 | // MoveIt!
44 | #include
45 |
46 | // Grasp generation
47 | #include
48 | #include
49 | #include // simple tool for showing graspsp
50 |
51 | namespace moveit_simple_grasps
52 | {
53 |
54 | static const double BLOCK_SIZE = 0.04;
55 |
56 | struct MetaBlock
57 | {
58 | std::string name;
59 | geometry_msgs::Pose start_pose;
60 | geometry_msgs::Pose goal_pose;
61 | };
62 |
63 | class MoveItBlocks
64 | {
65 | public:
66 |
67 | // grasp generator
68 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
69 |
70 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
71 |
72 | // data for generating grasps
73 | moveit_simple_grasps::GraspData grasp_data_;
74 |
75 | // our interface with MoveIt
76 | boost::scoped_ptr move_group_;
77 |
78 | // which arm are we using
79 | std::string ee_group_name_;
80 | std::string planning_group_name_;
81 |
82 |
83 | ros::NodeHandle nh_;
84 |
85 | // settings
86 | bool auto_reset_;
87 | int auto_reset_sec_;
88 | int pick_place_count_; // tracks how many pick_places have run
89 |
90 | MoveItBlocks()
91 | : auto_reset_(false),
92 | auto_reset_sec_(4),
93 | pick_place_count_(0),
94 | nh_("~")
95 | {
96 | ROS_INFO_STREAM_NAMED("moveit_blocks","Starting MoveIt Blocks");
97 |
98 | // Get arm info from param server
99 | nh_.param("ee_group_name", ee_group_name_, std::string("unknown"));
100 | nh_.param("planning_group_name", planning_group_name_, std::string("unknown"));
101 |
102 | ROS_INFO_STREAM_NAMED("moveit_blocks","End Effector: " << ee_group_name_);
103 | ROS_INFO_STREAM_NAMED("moveit_blocks","Planning Group: " << planning_group_name_);
104 |
105 | // Create MoveGroup for one of the planning groups
106 | move_group_.reset(new move_group_interface::MoveGroup(planning_group_name_));
107 | move_group_->setPlanningTime(30.0);
108 |
109 | // Load grasp generator
110 | if (!grasp_data_.loadRobotGraspData(nh_, ee_group_name_))
111 | ros::shutdown();
112 |
113 | // Load the Robot Viz Tools for publishing to rviz
114 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools( grasp_data_.base_link_));
115 | visual_tools_->setFloorToBaseHeight(-0.9);
116 | visual_tools_->loadEEMarker(grasp_data_.ee_group_, planning_group_name_);
117 |
118 | simple_grasps_.reset(new moveit_simple_grasps::SimpleGrasps(visual_tools_));
119 |
120 | // Let everything load
121 | ros::Duration(1.0).sleep();
122 |
123 | // Do it.
124 | startRoutine();
125 | }
126 |
127 | bool startRoutine()
128 | {
129 | // Debug - calculate and output table surface dimensions
130 | /*
131 | if( false )
132 | {
133 | double y_min, y_max, x_min, x_max;
134 | getTableWidthRange(y_min, y_max);
135 | getTableDepthRange(x_min, x_max);
136 | ROS_INFO_STREAM_NAMED("table","Blocks width range: " << y_min << " <= y <= " << y_max);
137 | ROS_INFO_STREAM_NAMED("table","Blocks depth range: " << x_min << " <= x <= " << x_max);
138 | }
139 | */
140 |
141 | // Create start block positions (hard coded)
142 | std::vector blocks;
143 | double block_y = 0.1;
144 | double block_x = 0.35;
145 | // Flip the side of the table the blocks are on depending on which arm we are using
146 | //if( arm_.compare("right") == 0 )
147 | // block_y *= -1;
148 | blocks.push_back( createStartBlock(block_x, block_y, "Block1") );
149 | blocks.push_back( createStartBlock(block_x+0.1, block_y, "Block2") );
150 | blocks.push_back( createStartBlock(block_x+0.2, block_y, "Block3") );
151 |
152 | // The goal for each block is simply translating them on the y axis
153 | for (std::size_t i = 0; i < blocks.size(); ++i)
154 | {
155 | blocks[i].goal_pose = blocks[i].start_pose;
156 | blocks[i].goal_pose.position.y += 0.2;
157 | }
158 |
159 | // Show grasp visualizations or not
160 | visual_tools_->setMuted(false);
161 |
162 | // Create the walls and tables
163 | //createEnvironment(visual_tools_);
164 |
165 | // --------------------------------------------------------------------------------------------------------
166 | // Repeat pick and place forever
167 | while(ros::ok())
168 | {
169 | // --------------------------------------------------------------------------------------------
170 | // Re-add all blocks
171 | for (std::size_t i = 0; i < blocks.size(); ++i)
172 | {
173 | resetBlock(blocks[i]);
174 | }
175 |
176 | // Place on left side, then back on right side
177 | for (std::size_t side = 0; side < 2; ++side)
178 | {
179 |
180 | // Do for all blocks
181 | for (std::size_t block_id = 0; block_id < blocks.size(); ++block_id)
182 | {
183 | // Pick -------------------------------------------------------------------------------------
184 | while(ros::ok())
185 | {
186 | ROS_INFO_STREAM_NAMED("pick_place","Picking '" << blocks[block_id].name << "'");
187 |
188 | // Visualize the block we are about to pick
189 | visual_tools_->publishCuboid(blocks[block_id].start_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
190 |
191 | if( !pick(blocks[block_id].start_pose, blocks[block_id].name) )
192 | {
193 | ROS_ERROR_STREAM_NAMED("pick_place","Pick failed.");
194 |
195 | // Ask user if we should try again
196 | if( !promptUser() )
197 | exit(0);
198 |
199 | // Retry
200 | resetBlock(blocks[block_id]);
201 | }
202 | else
203 | {
204 | ROS_INFO_STREAM_NAMED("pick_place","Done with pick ---------------------------");
205 | break;
206 | }
207 | }
208 |
209 | // Place -------------------------------------------------------------------------------------
210 | while(ros::ok())
211 | {
212 | ROS_INFO_STREAM_NAMED("pick_place","Placing '" << blocks[block_id].name << "'");
213 |
214 | // Publish goal block location
215 | visual_tools_->publishCuboid(blocks[block_id].goal_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
216 |
217 | if( !place(blocks[block_id].goal_pose, blocks[block_id].name) )
218 | {
219 | ROS_ERROR_STREAM_NAMED("pick_place","Place failed.");
220 |
221 | // Determine if the attached collision body as already been removed, in which case
222 | // we can ignore the failure and just resume picking
223 | /*
224 | if( !move_group_->hasAttachedObject(blocks[block_id].name) )
225 | {
226 | ROS_WARN_STREAM_NAMED("pick_place","Collision object already detached, so auto resuming pick place.");
227 |
228 | // Ask user if we should try again
229 | if( !promptUser() )
230 | break; // resume picking
231 | }
232 | */
233 |
234 | // Ask user if we should try again
235 | if( !promptUser() )
236 | exit(0);
237 | }
238 | else
239 | {
240 | ROS_INFO_STREAM_NAMED("pick_place","Done with place ----------------------------");
241 | break;
242 | }
243 | } // place retry loop
244 |
245 | // Swap this block's start and end pose so that we can then move them back to position
246 | geometry_msgs::Pose temp = blocks[block_id].start_pose;
247 | blocks[block_id].start_pose = blocks[block_id].goal_pose;
248 | blocks[block_id].goal_pose = temp;
249 |
250 | pick_place_count_++;
251 |
252 | } // loop through 3 blocks
253 |
254 | ROS_INFO_STREAM_NAMED("pick_place","Finished picking and placing " << blocks.size()
255 | << " blocks. Total pick_places: " << pick_place_count_);
256 |
257 | } // place on both sides of table
258 |
259 | // Ask user if we should repeat
260 | //if( !promptUser() )
261 | // break;
262 | ros::Duration(1.0).sleep();
263 |
264 | }
265 |
266 | // Everything worked!
267 | return true;
268 | }
269 |
270 | void resetBlock(MetaBlock block)
271 | {
272 | // Remove attached object
273 | visual_tools_->cleanupACO(block.name);
274 |
275 | // Remove collision object
276 | visual_tools_->cleanupCO(block.name);
277 |
278 | // Add the collision block
279 | visual_tools_->publishCollisionBlock(block.start_pose, block.name, BLOCK_SIZE);
280 | }
281 |
282 | MetaBlock createStartBlock(double x, double y, const std::string name)
283 | {
284 | MetaBlock start_block;
285 | start_block.name = name;
286 |
287 | // Position
288 | start_block.start_pose.position.x = x;
289 | start_block.start_pose.position.y = y;
290 | start_block.start_pose.position.z = BLOCK_SIZE / 2.0; //getTableHeight(-0.9);
291 |
292 | // Orientation
293 | double angle = 0; // M_PI / 1.5;
294 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
295 | start_block.start_pose.orientation.x = quat.x();
296 | start_block.start_pose.orientation.y = quat.y();
297 | start_block.start_pose.orientation.z = quat.z();
298 | start_block.start_pose.orientation.w = quat.w();
299 |
300 | return start_block;
301 | }
302 |
303 | bool pick(const geometry_msgs::Pose& block_pose, std::string block_name)
304 | {
305 | std::vector possible_grasps;
306 |
307 | // Pick grasp
308 | simple_grasps_->generateBlockGrasps( block_pose, grasp_data_, possible_grasps );
309 |
310 | // Visualize them
311 | //visual_tools_->publishAnimatedGrasps(possible_grasps, grasp_data_.ee_parent_link_);
312 | visual_tools_->publishGrasps(possible_grasps, grasp_data_.ee_parent_link_);
313 |
314 | // Prevent collision with table
315 | //move_group_->setSupportSurfaceName(SUPPORT_SURFACE3_NAME);
316 |
317 | // Allow blocks to be touched by end effector
318 | {
319 | // an optional list of obstacles that we have semantic information about and that can be touched/pushed/moved in the course of grasping
320 | std::vector allowed_touch_objects;
321 | allowed_touch_objects.push_back("Block1");
322 | allowed_touch_objects.push_back("Block2");
323 | allowed_touch_objects.push_back("Block3");
324 | allowed_touch_objects.push_back("Block4");
325 |
326 | // Add this list to all grasps
327 | for (std::size_t i = 0; i < possible_grasps.size(); ++i)
328 | {
329 | possible_grasps[i].allowed_touch_objects = allowed_touch_objects;
330 | }
331 | }
332 |
333 | //ROS_INFO_STREAM_NAMED("","Grasp 0\n" << possible_grasps[0]);
334 |
335 | return move_group_->pick(block_name, possible_grasps);
336 | }
337 |
338 | bool place(const geometry_msgs::Pose& goal_block_pose, std::string block_name)
339 | {
340 | ROS_WARN_STREAM_NAMED("place","Placing '"<< block_name << "'");
341 |
342 | std::vector place_locations;
343 |
344 | // Re-usable datastruct
345 | geometry_msgs::PoseStamped pose_stamped;
346 | pose_stamped.header.frame_id = grasp_data_.base_link_;
347 | pose_stamped.header.stamp = ros::Time::now();
348 |
349 | // Create 360 degrees of place location rotated around a center
350 | for (double angle = 0; angle < 2*M_PI; angle += M_PI/2)
351 | {
352 | pose_stamped.pose = goal_block_pose;
353 |
354 | // Orientation
355 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
356 | pose_stamped.pose.orientation.x = quat.x();
357 | pose_stamped.pose.orientation.y = quat.y();
358 | pose_stamped.pose.orientation.z = quat.z();
359 | pose_stamped.pose.orientation.w = quat.w();
360 |
361 | // Create new place location
362 | moveit_msgs::PlaceLocation place_loc;
363 |
364 | place_loc.place_pose = pose_stamped;
365 |
366 | visual_tools_->publishCuboid(place_loc.place_pose.pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
367 |
368 | // Approach
369 | moveit_msgs::GripperTranslation pre_place_approach;
370 | pre_place_approach.direction.header.stamp = ros::Time::now();
371 | pre_place_approach.desired_distance = grasp_data_.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
372 | pre_place_approach.min_distance = grasp_data_.approach_retreat_min_dist_; // half of the desired? Untested.
373 | pre_place_approach.direction.header.frame_id = grasp_data_.base_link_;
374 | pre_place_approach.direction.vector.x = 0;
375 | pre_place_approach.direction.vector.y = 0;
376 | pre_place_approach.direction.vector.z = -1; // Approach direction (negative z axis) // TODO: document this assumption
377 | place_loc.pre_place_approach = pre_place_approach;
378 |
379 | // Retreat
380 | moveit_msgs::GripperTranslation post_place_retreat;
381 | post_place_retreat.direction.header.stamp = ros::Time::now();
382 | post_place_retreat.desired_distance = grasp_data_.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
383 | post_place_retreat.min_distance = grasp_data_.approach_retreat_min_dist_; // half of the desired? Untested.
384 | post_place_retreat.direction.header.frame_id = grasp_data_.base_link_;
385 | post_place_retreat.direction.vector.x = 0;
386 | post_place_retreat.direction.vector.y = 0;
387 | post_place_retreat.direction.vector.z = 1; // Retreat direction (pos z axis)
388 | place_loc.post_place_retreat = post_place_retreat;
389 |
390 | // Post place posture - use same as pre-grasp posture (the OPEN command)
391 | place_loc.post_place_posture = grasp_data_.pre_grasp_posture_;
392 |
393 | place_locations.push_back(place_loc);
394 | }
395 |
396 | // Prevent collision with table
397 | //move_group_->setSupportSurfaceName(SUPPORT_SURFACE3_NAME);
398 |
399 | move_group_->setPlannerId("RRTConnectkConfigDefault");
400 |
401 | return move_group_->place(block_name, place_locations);
402 | }
403 |
404 | bool promptUser()
405 | {
406 | // Make sure ROS is still with us
407 | if( !ros::ok() )
408 | return false;
409 |
410 | if( auto_reset_ )
411 | {
412 | ROS_INFO_STREAM_NAMED("pick_place","Auto-retrying in " << auto_reset_sec_ << " seconds");
413 | ros::Duration(auto_reset_sec_).sleep();
414 | }
415 | else
416 | {
417 | ROS_INFO_STREAM_NAMED("pick_place","Retry? (y/n)");
418 | char input; // used for prompting yes/no
419 | std::cin >> input;
420 | if( input == 'n' )
421 | return false;
422 | }
423 | return true;
424 | }
425 |
426 | };
427 |
428 | } //namespace
429 |
--------------------------------------------------------------------------------
/launch/simple_grasps.rviz:
--------------------------------------------------------------------------------
1 | Panels:
2 | - Class: rviz/Displays
3 | Help Height: 78
4 | Name: Displays
5 | Property Tree Widget:
6 | Expanded:
7 | - /Global Options1
8 | - /Status1
9 | - /Marker1
10 | - /MotionPlanning1/Planned Path1
11 | Splitter Ratio: 0.5
12 | Tree Height: 738
13 | - Class: rviz/Selection
14 | Name: Selection
15 | - Class: rviz/Tool Properties
16 | Expanded:
17 | - /2D Pose Estimate1
18 | - /2D Nav Goal1
19 | - /Publish Point1
20 | Name: Tool Properties
21 | Splitter Ratio: 0.588679
22 | - Class: rviz/Views
23 | Expanded:
24 | - /Current View1
25 | Name: Views
26 | Splitter Ratio: 0.5
27 | - Class: rviz/Time
28 | Experimental: false
29 | Name: Time
30 | SyncMode: 0
31 | SyncSource: ""
32 | Visualization Manager:
33 | Class: ""
34 | Displays:
35 | - Alpha: 0.5
36 | Cell Size: 1
37 | Class: rviz/Grid
38 | Color: 160; 160; 164
39 | Enabled: true
40 | Line Style:
41 | Line Width: 0.03
42 | Value: Lines
43 | Name: Grid
44 | Normal Cell Count: 0
45 | Offset:
46 | X: 0
47 | Y: 0
48 | Z: 0
49 | Plane: XY
50 | Plane Cell Count: 10
51 | Reference Frame:
52 | Value: true
53 | - Class: rviz/Marker
54 | Enabled: true
55 | Marker Topic: /rviz_visual_tools
56 | Name: Marker
57 | Namespaces:
58 | Text: true
59 | end_effector: true
60 | Queue Size: 100
61 | Value: true
62 | - Class: moveit_rviz_plugin/MotionPlanning
63 | Enabled: false
64 | Move Group Namespace: ""
65 | MoveIt_Goal_Tolerance: 0
66 | MoveIt_Planning_Attempts: 10
67 | MoveIt_Planning_Time: 5
68 | MoveIt_Use_Constraint_Aware_IK: true
69 | MoveIt_Warehouse_Host: 127.0.0.1
70 | MoveIt_Warehouse_Port: 33829
71 | Name: MotionPlanning
72 | Planned Path:
73 | Links:
74 | All Links Enabled: true
75 | Expand Joint Details: false
76 | Expand Link Details: false
77 | Expand Tree: false
78 | Link Tree Style: Links in Alphabetic Order
79 | base:
80 | Alpha: 1
81 | Show Axes: false
82 | Show Trail: false
83 | collision_head_link_1:
84 | Alpha: 1
85 | Show Axes: false
86 | Show Trail: false
87 | Value: true
88 | collision_head_link_2:
89 | Alpha: 1
90 | Show Axes: false
91 | Show Trail: false
92 | Value: true
93 | display:
94 | Alpha: 1
95 | Show Axes: false
96 | Show Trail: false
97 | Value: true
98 | dummyhead1:
99 | Alpha: 1
100 | Show Axes: false
101 | Show Trail: false
102 | head:
103 | Alpha: 1
104 | Show Axes: false
105 | Show Trail: false
106 | Value: true
107 | head_camera:
108 | Alpha: 1
109 | Show Axes: false
110 | Show Trail: false
111 | left_arm_itb:
112 | Alpha: 1
113 | Show Axes: false
114 | Show Trail: false
115 | left_arm_mount:
116 | Alpha: 1
117 | Show Axes: false
118 | Show Trail: false
119 | left_gripper:
120 | Alpha: 1
121 | Show Axes: false
122 | Show Trail: false
123 | Value: true
124 | left_gripper_base:
125 | Alpha: 1
126 | Show Axes: false
127 | Show Trail: false
128 | Value: true
129 | left_gripper_l_finger:
130 | Alpha: 1
131 | Show Axes: false
132 | Show Trail: false
133 | Value: true
134 | left_gripper_r_finger:
135 | Alpha: 1
136 | Show Axes: false
137 | Show Trail: false
138 | Value: true
139 | left_hand:
140 | Alpha: 1
141 | Show Axes: false
142 | Show Trail: false
143 | Value: true
144 | left_hand_accelerometer:
145 | Alpha: 1
146 | Show Axes: false
147 | Show Trail: false
148 | Value: true
149 | left_hand_camera:
150 | Alpha: 1
151 | Show Axes: false
152 | Show Trail: false
153 | Value: true
154 | left_hand_camera_axis:
155 | Alpha: 1
156 | Show Axes: false
157 | Show Trail: false
158 | left_hand_range:
159 | Alpha: 1
160 | Show Axes: false
161 | Show Trail: false
162 | Value: true
163 | left_lower_elbow:
164 | Alpha: 1
165 | Show Axes: false
166 | Show Trail: false
167 | Value: true
168 | left_lower_forearm:
169 | Alpha: 1
170 | Show Axes: false
171 | Show Trail: false
172 | Value: true
173 | left_lower_shoulder:
174 | Alpha: 1
175 | Show Axes: false
176 | Show Trail: false
177 | Value: true
178 | left_torso_itb:
179 | Alpha: 1
180 | Show Axes: false
181 | Show Trail: false
182 | left_upper_elbow:
183 | Alpha: 1
184 | Show Axes: false
185 | Show Trail: false
186 | Value: true
187 | left_upper_elbow_visual:
188 | Alpha: 1
189 | Show Axes: false
190 | Show Trail: false
191 | Value: true
192 | left_upper_forearm:
193 | Alpha: 1
194 | Show Axes: false
195 | Show Trail: false
196 | Value: true
197 | left_upper_forearm_visual:
198 | Alpha: 1
199 | Show Axes: false
200 | Show Trail: false
201 | Value: true
202 | left_upper_shoulder:
203 | Alpha: 1
204 | Show Axes: false
205 | Show Trail: false
206 | Value: true
207 | left_wrist:
208 | Alpha: 1
209 | Show Axes: false
210 | Show Trail: false
211 | Value: true
212 | pedestal:
213 | Alpha: 1
214 | Show Axes: false
215 | Show Trail: false
216 | Value: true
217 | right_arm_itb:
218 | Alpha: 1
219 | Show Axes: false
220 | Show Trail: false
221 | right_arm_mount:
222 | Alpha: 1
223 | Show Axes: false
224 | Show Trail: false
225 | right_gripper:
226 | Alpha: 1
227 | Show Axes: false
228 | Show Trail: false
229 | Value: true
230 | right_gripper_base:
231 | Alpha: 1
232 | Show Axes: false
233 | Show Trail: false
234 | Value: true
235 | right_gripper_l_finger:
236 | Alpha: 1
237 | Show Axes: false
238 | Show Trail: false
239 | Value: true
240 | right_gripper_r_finger:
241 | Alpha: 1
242 | Show Axes: false
243 | Show Trail: false
244 | Value: true
245 | right_hand:
246 | Alpha: 1
247 | Show Axes: false
248 | Show Trail: false
249 | Value: true
250 | right_hand_accelerometer:
251 | Alpha: 1
252 | Show Axes: false
253 | Show Trail: false
254 | Value: true
255 | right_hand_camera:
256 | Alpha: 1
257 | Show Axes: false
258 | Show Trail: false
259 | Value: true
260 | right_hand_camera_axis:
261 | Alpha: 1
262 | Show Axes: false
263 | Show Trail: false
264 | right_hand_range:
265 | Alpha: 1
266 | Show Axes: false
267 | Show Trail: false
268 | Value: true
269 | right_lower_elbow:
270 | Alpha: 1
271 | Show Axes: false
272 | Show Trail: false
273 | Value: true
274 | right_lower_forearm:
275 | Alpha: 1
276 | Show Axes: false
277 | Show Trail: false
278 | Value: true
279 | right_lower_shoulder:
280 | Alpha: 1
281 | Show Axes: false
282 | Show Trail: false
283 | Value: true
284 | right_torso_itb:
285 | Alpha: 1
286 | Show Axes: false
287 | Show Trail: false
288 | right_upper_elbow:
289 | Alpha: 1
290 | Show Axes: false
291 | Show Trail: false
292 | Value: true
293 | right_upper_elbow_visual:
294 | Alpha: 1
295 | Show Axes: false
296 | Show Trail: false
297 | Value: true
298 | right_upper_forearm:
299 | Alpha: 1
300 | Show Axes: false
301 | Show Trail: false
302 | Value: true
303 | right_upper_forearm_visual:
304 | Alpha: 1
305 | Show Axes: false
306 | Show Trail: false
307 | Value: true
308 | right_upper_shoulder:
309 | Alpha: 1
310 | Show Axes: false
311 | Show Trail: false
312 | Value: true
313 | right_wrist:
314 | Alpha: 1
315 | Show Axes: false
316 | Show Trail: false
317 | Value: true
318 | screen:
319 | Alpha: 1
320 | Show Axes: false
321 | Show Trail: false
322 | Value: true
323 | sonar_ring:
324 | Alpha: 1
325 | Show Axes: false
326 | Show Trail: false
327 | Value: true
328 | torso:
329 | Alpha: 1
330 | Show Axes: false
331 | Show Trail: false
332 | Value: true
333 | Loop Animation: false
334 | Robot Alpha: 0.5
335 | Show Robot Collision: false
336 | Show Robot Visual: true
337 | Show Trail: false
338 | State Display Time: REALTIME
339 | Trajectory Topic: /move_group/display_planned_path
340 | Planning Metrics:
341 | Payload: 1
342 | Show Joint Torques: false
343 | Show Manipulability: false
344 | Show Manipulability Index: false
345 | Show Weight Limit: false
346 | TextHeight: 0.08
347 | Planning Request:
348 | Colliding Link Color: 255; 0; 0
349 | Goal State Alpha: 1
350 | Goal State Color: 250; 128; 0
351 | Interactive Marker Size: 0
352 | Joint Violation Color: 255; 0; 255
353 | Planning Group: both_arms
354 | Query Goal State: false
355 | Query Start State: false
356 | Show Workspace: false
357 | Start State Alpha: 1
358 | Start State Color: 0; 255; 0
359 | Planning Scene Topic: planning_scene
360 | Robot Description: robot_description
361 | Scene Geometry:
362 | Scene Alpha: 0.9
363 | Scene Color: 50; 230; 50
364 | Scene Display Time: 0.2
365 | Show Scene Geometry: false
366 | Voxel Coloring: Z-Axis
367 | Voxel Rendering: Occupied Voxels
368 | Scene Robot:
369 | Attached Body Color: 150; 50; 150
370 | Links:
371 | All Links Enabled: true
372 | Expand Joint Details: false
373 | Expand Link Details: false
374 | Expand Tree: false
375 | Link Tree Style: Links in Alphabetic Order
376 | base:
377 | Alpha: 1
378 | Show Axes: false
379 | Show Trail: false
380 | collision_head_link_1:
381 | Alpha: 1
382 | Show Axes: false
383 | Show Trail: false
384 | Value: true
385 | collision_head_link_2:
386 | Alpha: 1
387 | Show Axes: false
388 | Show Trail: false
389 | Value: true
390 | display:
391 | Alpha: 1
392 | Show Axes: false
393 | Show Trail: false
394 | Value: true
395 | dummyhead1:
396 | Alpha: 1
397 | Show Axes: false
398 | Show Trail: false
399 | head:
400 | Alpha: 1
401 | Show Axes: false
402 | Show Trail: false
403 | Value: true
404 | head_camera:
405 | Alpha: 1
406 | Show Axes: false
407 | Show Trail: false
408 | left_arm_itb:
409 | Alpha: 1
410 | Show Axes: false
411 | Show Trail: false
412 | left_arm_mount:
413 | Alpha: 1
414 | Show Axes: false
415 | Show Trail: false
416 | left_gripper:
417 | Alpha: 1
418 | Show Axes: false
419 | Show Trail: false
420 | Value: true
421 | left_gripper_base:
422 | Alpha: 1
423 | Show Axes: false
424 | Show Trail: false
425 | Value: true
426 | left_gripper_l_finger:
427 | Alpha: 1
428 | Show Axes: false
429 | Show Trail: false
430 | Value: true
431 | left_gripper_r_finger:
432 | Alpha: 1
433 | Show Axes: false
434 | Show Trail: false
435 | Value: true
436 | left_hand:
437 | Alpha: 1
438 | Show Axes: false
439 | Show Trail: false
440 | Value: true
441 | left_hand_accelerometer:
442 | Alpha: 1
443 | Show Axes: false
444 | Show Trail: false
445 | Value: true
446 | left_hand_camera:
447 | Alpha: 1
448 | Show Axes: false
449 | Show Trail: false
450 | Value: true
451 | left_hand_camera_axis:
452 | Alpha: 1
453 | Show Axes: false
454 | Show Trail: false
455 | left_hand_range:
456 | Alpha: 1
457 | Show Axes: false
458 | Show Trail: false
459 | Value: true
460 | left_lower_elbow:
461 | Alpha: 1
462 | Show Axes: false
463 | Show Trail: false
464 | Value: true
465 | left_lower_forearm:
466 | Alpha: 1
467 | Show Axes: false
468 | Show Trail: false
469 | Value: true
470 | left_lower_shoulder:
471 | Alpha: 1
472 | Show Axes: false
473 | Show Trail: false
474 | Value: true
475 | left_torso_itb:
476 | Alpha: 1
477 | Show Axes: false
478 | Show Trail: false
479 | left_upper_elbow:
480 | Alpha: 1
481 | Show Axes: false
482 | Show Trail: false
483 | Value: true
484 | left_upper_elbow_visual:
485 | Alpha: 1
486 | Show Axes: false
487 | Show Trail: false
488 | Value: true
489 | left_upper_forearm:
490 | Alpha: 1
491 | Show Axes: false
492 | Show Trail: false
493 | Value: true
494 | left_upper_forearm_visual:
495 | Alpha: 1
496 | Show Axes: false
497 | Show Trail: false
498 | Value: true
499 | left_upper_shoulder:
500 | Alpha: 1
501 | Show Axes: false
502 | Show Trail: false
503 | Value: true
504 | left_wrist:
505 | Alpha: 1
506 | Show Axes: false
507 | Show Trail: false
508 | Value: true
509 | pedestal:
510 | Alpha: 1
511 | Show Axes: false
512 | Show Trail: false
513 | Value: true
514 | right_arm_itb:
515 | Alpha: 1
516 | Show Axes: false
517 | Show Trail: false
518 | right_arm_mount:
519 | Alpha: 1
520 | Show Axes: false
521 | Show Trail: false
522 | right_gripper:
523 | Alpha: 1
524 | Show Axes: false
525 | Show Trail: false
526 | Value: true
527 | right_gripper_base:
528 | Alpha: 1
529 | Show Axes: false
530 | Show Trail: false
531 | Value: true
532 | right_gripper_l_finger:
533 | Alpha: 1
534 | Show Axes: false
535 | Show Trail: false
536 | Value: true
537 | right_gripper_r_finger:
538 | Alpha: 1
539 | Show Axes: false
540 | Show Trail: false
541 | Value: true
542 | right_hand:
543 | Alpha: 1
544 | Show Axes: false
545 | Show Trail: false
546 | Value: true
547 | right_hand_accelerometer:
548 | Alpha: 1
549 | Show Axes: false
550 | Show Trail: false
551 | Value: true
552 | right_hand_camera:
553 | Alpha: 1
554 | Show Axes: false
555 | Show Trail: false
556 | Value: true
557 | right_hand_camera_axis:
558 | Alpha: 1
559 | Show Axes: false
560 | Show Trail: false
561 | right_hand_range:
562 | Alpha: 1
563 | Show Axes: false
564 | Show Trail: false
565 | Value: true
566 | right_lower_elbow:
567 | Alpha: 1
568 | Show Axes: false
569 | Show Trail: false
570 | Value: true
571 | right_lower_forearm:
572 | Alpha: 1
573 | Show Axes: false
574 | Show Trail: false
575 | Value: true
576 | right_lower_shoulder:
577 | Alpha: 1
578 | Show Axes: false
579 | Show Trail: false
580 | Value: true
581 | right_torso_itb:
582 | Alpha: 1
583 | Show Axes: false
584 | Show Trail: false
585 | right_upper_elbow:
586 | Alpha: 1
587 | Show Axes: false
588 | Show Trail: false
589 | Value: true
590 | right_upper_elbow_visual:
591 | Alpha: 1
592 | Show Axes: false
593 | Show Trail: false
594 | Value: true
595 | right_upper_forearm:
596 | Alpha: 1
597 | Show Axes: false
598 | Show Trail: false
599 | Value: true
600 | right_upper_forearm_visual:
601 | Alpha: 1
602 | Show Axes: false
603 | Show Trail: false
604 | Value: true
605 | right_upper_shoulder:
606 | Alpha: 1
607 | Show Axes: false
608 | Show Trail: false
609 | Value: true
610 | right_wrist:
611 | Alpha: 1
612 | Show Axes: false
613 | Show Trail: false
614 | Value: true
615 | screen:
616 | Alpha: 1
617 | Show Axes: false
618 | Show Trail: false
619 | Value: true
620 | sonar_ring:
621 | Alpha: 1
622 | Show Axes: false
623 | Show Trail: false
624 | Value: true
625 | torso:
626 | Alpha: 1
627 | Show Axes: false
628 | Show Trail: false
629 | Value: true
630 | Robot Alpha: 0.5
631 | Show Robot Collision: false
632 | Show Robot Visual: true
633 | Value: false
634 | Enabled: true
635 | Global Options:
636 | Background Color: 48; 48; 48
637 | Fixed Frame: base
638 | Frame Rate: 30
639 | Name: root
640 | Tools:
641 | - Class: rviz/Interact
642 | Hide Inactive Objects: true
643 | - Class: rviz/MoveCamera
644 | - Class: rviz/Select
645 | - Class: rviz/FocusCamera
646 | - Class: rviz/Measure
647 | - Class: rviz/SetInitialPose
648 | Topic: /initialpose
649 | - Class: rviz/SetGoal
650 | Topic: /move_base_simple/goal
651 | - Class: rviz/PublishPoint
652 | Single click: true
653 | Topic: /clicked_point
654 | Value: true
655 | Views:
656 | Current:
657 | Class: rviz/Orbit
658 | Distance: 1.9896
659 | Enable Stereo Rendering:
660 | Stereo Eye Separation: 0.06
661 | Stereo Focal Distance: 1
662 | Swap Stereo Eyes: false
663 | Value: false
664 | Focal Point:
665 | X: 0.374866
666 | Y: -0.131657
667 | Z: 0.0590967
668 | Name: Current View
669 | Near Clip Distance: 0.01
670 | Pitch: 0.575398
671 | Target Frame:
672 | Value: Orbit (rviz)
673 | Yaw: 4.49857
674 | Saved: ~
675 | Window Geometry:
676 | Displays:
677 | collapsed: false
678 | Height: 1004
679 | Hide Left Dock: false
680 | Hide Right Dock: false
681 | Motion Planning:
682 | collapsed: false
683 | QMainWindow State: 000000ff00000000fd00000004000000000000010f0000038dfc0200000009fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000004100000371000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000001e004d006f00740069006f006e00200050006c0061006e006e0069006e006701000003b8000000160000001600000016000000010000010f000003f1fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730000000041000003f1000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000006380000003efc0100000002fb0000000800540069006d0065000000000000000638000002f600fffffffb0000000800540069006d006501000000000000045000000000000000000000066b0000038d00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
684 | Selection:
685 | collapsed: false
686 | Time:
687 | collapsed: false
688 | Tool Properties:
689 | collapsed: false
690 | Views:
691 | collapsed: false
692 | Width: 1920
693 | X: 1909
694 | Y: 17
695 |
--------------------------------------------------------------------------------
149 |
150 | To filter grasps after generating them:
151 | ```
152 | // Filter the grasp for only the ones that are reachable
153 | bool filter_pregrasps = true;
154 | std::vector ik_solutions; // save each grasps ik solution for visualization
155 | grasp_filter_->filterGrasps(possible_grasps, ik_solutions, filter_pregrasps, grasp_data_.ee_parent_link_, planning_group_name_);
156 | ```
157 |
158 | To view the filtered grasps along with the planning group pose:
159 | ```
160 | visual_tools_->publishIKSolutions(ik_solutions, planning_group_name_, 0.25);
161 | ```
162 |
163 | There is more that is undocumented but I'm tired of writing this.
164 |
165 | ## Tested Robots
166 |
167 | - [Baxter](https://github.com/davetcoleman/baxter_cpp)
168 | - [REEM](http://wiki.ros.org/Robots/REEM)
169 |
170 | ## Example Code
171 |
172 | A new (still in development) example tool is ``moveit_blocks.h`` located in the ``include`` folder. It gives you a complete pick and place pipeline using this package and MoveIt, and all you need is the appropriate config file and launch file. An example launch file can be found [here](https://github.com/davetcoleman/clam/blob/master/clam_pick_place/launch/pick_place.launch).
173 |
174 | There are currently example implementations:
175 |
176 | - [baxter_pick_place](https://github.com/davetcoleman/baxter_cpp/tree/hydro-devel/baxter_pick_place)
177 | - [reem_tabletop_grasping](https://github.com/pal-robotics/reem_tabletop_grasping)
178 | - [clam_pick_place](https://github.com/davetcoleman/clam/tree/master/clam_pick_place)
179 |
180 | ## Testing
181 |
182 | There are two tests scripts in this package. To view the tests, first start Rviz with:
183 |
184 | ```
185 | roslaunch moveit_simple_grasps grasp_test_rviz.launch
186 | ```
187 |
188 | To test just grasp generation for randomly placed blocks:
189 | ```
190 | roslaunch moveit_simple_grasps grasp_test.launch
191 | ```
192 |
193 | To also test the IK grasp filtering:
194 | ```
195 | roslaunch moveit_simple_grasps grasp_filter_test.launch
196 | ```
197 |
198 | ## TODO
199 |
200 | Features we'd like to see added to this project:
201 |
202 | - Ability to reason about any shape, not just centroid of a bounding box
203 | - Input arbitrary meshes
204 | - Auto create a bounding box around that mesh
205 | - Better reasoning about support surfaces (table)
206 | - Integrate collision checking to verify feasibility of grasp
207 | - Support non-parallel gripper end effectors
208 | - Make grasp quality metric better informed
209 | - Make this project easier to setup for new robots
210 | - Integrate into Setup Assistant GUI
211 | - Improve simple pick and place pipline header file
212 |
213 | ## Contributors
214 |
215 | - Dave Coleman, CU Boulder @davetcoleman
216 | - Bence Magyar, PAL Robotics @bmagyar
217 |
--------------------------------------------------------------------------------
/src/simple_grasps_test.cpp:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /* Author: Dave Coleman
36 | Desc: Tests the grasp generator
37 | */
38 |
39 | // ROS
40 | #include
41 | #include
42 | #include
43 | #include
44 |
45 | // Grasp generation
46 | #include
47 |
48 | // Baxter specific properties
49 | #include
50 |
51 | namespace baxter_pick_place
52 | {
53 |
54 | static const double BLOCK_SIZE = 0.04;
55 |
56 | class GraspGeneratorTest
57 | {
58 | private:
59 | // A shared node handle
60 | ros::NodeHandle nh_;
61 |
62 | // Grasp generator
63 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
64 |
65 | // class for publishing stuff to rviz
66 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
67 |
68 | // robot-specific data for generating grasps
69 | moveit_simple_grasps::GraspData grasp_data_;
70 |
71 | // which baxter arm are we using
72 | std::string arm_;
73 | std::string ee_group_name_;
74 | std::string planning_group_name_;
75 |
76 | public:
77 |
78 | // Constructor
79 | GraspGeneratorTest(int num_tests)
80 | : nh_("~")
81 | {
82 | nh_.param("arm", arm_, std::string("left"));
83 | nh_.param("ee_group_name", ee_group_name_, std::string(arm_ + "_hand"));
84 | planning_group_name_ = arm_ + "_arm";
85 |
86 | ROS_INFO_STREAM_NAMED("test","Arm: " << arm_);
87 | ROS_INFO_STREAM_NAMED("test","End Effector: " << ee_group_name_);
88 | ROS_INFO_STREAM_NAMED("test","Planning Group: " << planning_group_name_);
89 |
90 | // ---------------------------------------------------------------------------------------------
91 | // Load grasp data specific to our robot
92 | if (!grasp_data_.loadRobotGraspData(nh_, ee_group_name_))
93 | ros::shutdown();
94 |
95 | // ---------------------------------------------------------------------------------------------
96 | // Load the Robot Viz Tools for publishing to Rviz
97 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools(grasp_data_.base_link_));
98 | visual_tools_->setLifetime(120.0);
99 | visual_tools_->loadMarkerPub();
100 |
101 | // ---------------------------------------------------------------------------------------------
102 | // Load grasp generator
103 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
104 |
105 | geometry_msgs::Pose pose;
106 | visual_tools_->generateEmptyPose(pose);
107 |
108 | // ---------------------------------------------------------------------------------------------
109 | // Animate open and closing end effector
110 |
111 | for (std::size_t i = 0; i < 4; ++i)
112 | {
113 | // Test visualization of end effector in OPEN position
114 | grasp_data_.setRobotStatePreGrasp( visual_tools_->getSharedRobotState() );
115 | const robot_model::JointModelGroup* ee_jmg = visual_tools_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
116 | visual_tools_->loadEEMarker(ee_jmg);
117 | visual_tools_->publishEEMarkers(pose, ee_jmg, rviz_visual_tools::ORANGE, "test_eef");
118 | ros::Duration(1.0).sleep();
119 |
120 | // Test visualization of end effector in CLOSED position
121 | grasp_data_.setRobotStateGrasp( visual_tools_->getSharedRobotState() );
122 | visual_tools_->loadEEMarker(ee_jmg);
123 | visual_tools_->publishEEMarkers(pose, ee_jmg, rviz_visual_tools::GREEN, "test_eef");
124 | ros::Duration(1.0).sleep();
125 | }
126 |
127 | // ---------------------------------------------------------------------------------------------
128 | // Generate grasps for a bunch of random objects
129 | geometry_msgs::Pose object_pose;
130 | std::vector possible_grasps;
131 |
132 | // Loop
133 | int i = 0;
134 | while(ros::ok())
135 | {
136 | ROS_INFO_STREAM_NAMED("test","Adding random object " << i+1 << " of " << num_tests);
137 |
138 | // Remove randomness when we are only running one test
139 | if (num_tests == 1)
140 | generateTestObject(object_pose);
141 | else
142 | generateRandomObject(object_pose);
143 |
144 | // Show the block
145 | visual_tools_->publishCuboid(object_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
146 |
147 | possible_grasps.clear();
148 |
149 | // Generate set of grasps for one object
150 | simple_grasps_->generateBlockGrasps(object_pose, grasp_data_, possible_grasps);
151 |
152 | // Visualize them
153 | const robot_model::JointModelGroup* ee_jmg = visual_tools_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
154 | visual_tools_->publishAnimatedGrasps(possible_grasps, ee_jmg);
155 | //visual_tools_->publishGrasps(possible_grasps, grasp_data_.ee_parent_link_);
156 |
157 | // Test if done
158 | ++i;
159 | if( i >= num_tests )
160 | break;
161 | }
162 | }
163 |
164 | void generateTestObject(geometry_msgs::Pose& object_pose)
165 | {
166 | // Position
167 | geometry_msgs::Pose start_object_pose;
168 |
169 | start_object_pose.position.x = 0.4;
170 | start_object_pose.position.y = -0.2;
171 | start_object_pose.position.z = 0.0;
172 |
173 | // Orientation
174 | double angle = M_PI / 1.5;
175 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
176 | start_object_pose.orientation.x = quat.x();
177 | start_object_pose.orientation.y = quat.y();
178 | start_object_pose.orientation.z = quat.z();
179 | start_object_pose.orientation.w = quat.w();
180 |
181 | // Choose which object to test
182 | object_pose = start_object_pose;
183 |
184 | //visual_tools_->publishObject( object_pose, OBJECT_SIZE, true );
185 | }
186 |
187 | void generateRandomObject(geometry_msgs::Pose& object_pose)
188 | {
189 | // Position
190 | object_pose.position.x = fRand(0.1,0.9); //0.55);
191 | object_pose.position.y = fRand(-0.28,0.28);
192 | object_pose.position.z = 0.02;
193 |
194 | // Orientation
195 | double angle = M_PI * fRand(0.1,1);
196 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
197 | object_pose.orientation.x = quat.x();
198 | object_pose.orientation.y = quat.y();
199 | object_pose.orientation.z = quat.z();
200 | object_pose.orientation.w = quat.w();
201 | }
202 |
203 | double fRand(double fMin, double fMax)
204 | {
205 | double f = (double)rand() / RAND_MAX;
206 | return fMin + f * (fMax - fMin);
207 | }
208 |
209 | }; // end of class
210 |
211 | } // namespace
212 |
213 |
214 | int main(int argc, char *argv[])
215 | {
216 | int num_tests = 10;
217 | ros::init(argc, argv, "grasp_generator_test");
218 |
219 | ROS_INFO_STREAM_NAMED("main","Simple Grasps Test");
220 |
221 | ros::AsyncSpinner spinner(2);
222 | spinner.start();
223 |
224 | // Seed random
225 | srand(ros::Time::now().toSec());
226 |
227 | // Benchmark time
228 | ros::Time start_time;
229 | start_time = ros::Time::now();
230 |
231 | // Run Tests
232 | baxter_pick_place::GraspGeneratorTest tester(num_tests);
233 |
234 | // Benchmark time
235 | double duration = (ros::Time::now() - start_time).toNSec() * 1e-6;
236 | ROS_INFO_STREAM_NAMED("","Total time: " << duration);
237 | //std::cout << duration << "\t" << num_tests << std::endl;
238 |
239 | ros::Duration(1.0).sleep(); // let rviz markers finish publishing
240 |
241 | return 0;
242 | }
243 |
--------------------------------------------------------------------------------
/src/grasp_filter_test.cpp:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /* Author: Dave Coleman
36 | Desc: Tests the grasp generator filter
37 | */
38 |
39 | // ROS
40 | #include
41 | #include
42 | #include
43 | #include
44 | #include
45 |
46 | // MoveIt
47 | #include
48 | #include
49 | #include
50 | #include
51 | #include
52 | #include
53 | #include
54 |
55 | // Rviz
56 | #include
57 | #include
58 |
59 | // Grasp
60 | #include
61 | #include
62 | #include
63 |
64 | // Baxter specific properties
65 | #include
66 | #include
67 |
68 | namespace moveit_simple_grasps
69 | {
70 |
71 | // Table dimensions
72 | static const double TABLE_HEIGHT = .92;
73 | static const double TABLE_WIDTH = .85;
74 | static const double TABLE_DEPTH = .47;
75 | static const double TABLE_X = 0.66;
76 | static const double TABLE_Y = 0;
77 | static const double TABLE_Z = -0.9/2+0.01;
78 |
79 | static const double BLOCK_SIZE = 0.04;
80 |
81 | class GraspGeneratorTest
82 | {
83 | private:
84 | // A shared node handle
85 | ros::NodeHandle nh_;
86 |
87 | // Grasp generator
88 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
89 |
90 | // Tool for visualizing things in Rviz
91 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
92 |
93 | // Grasp filter
94 | moveit_simple_grasps::GraspFilterPtr grasp_filter_;
95 |
96 | // data for generating grasps
97 | moveit_simple_grasps::GraspData grasp_data_;
98 |
99 | // Shared planning scene (load once for everything)
100 | planning_scene_monitor::PlanningSceneMonitorPtr planning_scene_monitor_;
101 |
102 | // which baxter arm are we using
103 | std::string arm_;
104 | std::string ee_group_name_;
105 | std::string planning_group_name_;
106 |
107 | public:
108 |
109 | // Constructor
110 | GraspGeneratorTest(int num_tests)
111 | : nh_("~")
112 | {
113 | // Get arm info from param server
114 | nh_.param("arm", arm_, std::string("left"));
115 | nh_.param("ee_group_name", ee_group_name_, std::string(arm_ + "_hand"));
116 | planning_group_name_ = arm_ + "_arm";
117 |
118 | ROS_INFO_STREAM_NAMED("test","Arm: " << arm_);
119 | ROS_INFO_STREAM_NAMED("test","End Effector: " << ee_group_name_);
120 | ROS_INFO_STREAM_NAMED("test","Planning Group: " << planning_group_name_);
121 |
122 | // ---------------------------------------------------------------------------------------------
123 | // Load grasp data
124 | if (!grasp_data_.loadRobotGraspData(nh_, ee_group_name_))
125 | ros::shutdown();
126 |
127 | // ---------------------------------------------------------------------------------------------
128 | // Load planning scene to share
129 | planning_scene_monitor_.reset(new planning_scene_monitor::PlanningSceneMonitor("robot_description"));
130 |
131 | // ---------------------------------------------------------------------------------------------
132 | // Load the Robot Viz Tools for publishing to Rviz
133 | const robot_model::JointModelGroup* ee_jmg = planning_scene_monitor_->getRobotModel()->getJointModelGroup(grasp_data_.ee_group_);
134 |
135 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools(grasp_data_.base_link_, "/end_effector_marker", planning_scene_monitor_));
136 | visual_tools_->setLifetime(40.0);
137 | visual_tools_->loadEEMarker(ee_jmg);
138 | visual_tools_->setFloorToBaseHeight(-0.9);
139 |
140 | // Clear out old collision objects just because
141 | //visual_tools_->removeAllCollisionObjects();
142 |
143 | // Create a collision table for fun
144 | visual_tools_->publishCollisionTable(TABLE_X, TABLE_Y, 0, 0, TABLE_WIDTH, TABLE_HEIGHT, TABLE_DEPTH, "table");
145 |
146 | // ---------------------------------------------------------------------------------------------
147 | // Load grasp generator
148 | simple_grasps_.reset( new moveit_simple_grasps::SimpleGrasps(visual_tools_) );
149 |
150 | // ---------------------------------------------------------------------------------------------
151 | // Load grasp filter
152 | robot_state::RobotState robot_state = planning_scene_monitor_->getPlanningScene()->getCurrentState();
153 | grasp_filter_.reset(new moveit_simple_grasps::GraspFilter(robot_state, visual_tools_) );
154 |
155 | // ---------------------------------------------------------------------------------------------
156 | // Generate grasps for a bunch of random objects
157 | geometry_msgs::Pose object_pose;
158 | std::vector possible_grasps;
159 | std::vector ik_solutions; // save each grasps ik solution for visualization
160 |
161 | // Loop
162 | for (int i = 0; i < num_tests; ++i)
163 | {
164 | ROS_INFO_STREAM_NAMED("test","Adding random object " << i+1 << " of " << num_tests);
165 |
166 | // Remove randomness when we are only running one test
167 | if (num_tests == 1)
168 | generateTestObject(object_pose);
169 | else
170 | generateRandomObject(object_pose);
171 |
172 | // Show the block
173 | visual_tools_->publishCuboid(object_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
174 |
175 | possible_grasps.clear();
176 | ik_solutions.clear();
177 |
178 | // Generate set of grasps for one object
179 | simple_grasps_->generateBlockGrasps( object_pose, grasp_data_, possible_grasps);
180 |
181 | // Filter the grasp for only the ones that are reachable
182 | bool filter_pregrasps = true;
183 | grasp_filter_->filterGrasps(possible_grasps, ik_solutions, filter_pregrasps, grasp_data_.ee_parent_link_, planning_group_name_);
184 |
185 | // Visualize them
186 | visual_tools_->publishAnimatedGrasps(possible_grasps, ee_jmg);
187 | const robot_model::JointModelGroup* arm_jmg = planning_scene_monitor_->getRobotModel()->getJointModelGroup(planning_group_name_);
188 | visual_tools_->publishIKSolutions(ik_solutions, arm_jmg, 0.25);
189 |
190 | // Make sure ros is still going
191 | if(!ros::ok())
192 | break;
193 | }
194 |
195 |
196 | }
197 |
198 | void generateTestObject(geometry_msgs::Pose& object_pose)
199 | {
200 | // Position
201 | geometry_msgs::Pose start_object_pose;
202 | geometry_msgs::Pose end_object_pose;
203 |
204 | start_object_pose.position.x = 0.8;
205 | start_object_pose.position.y = -0.5;
206 | start_object_pose.position.z = 0.02;
207 |
208 | end_object_pose.position.x = 0.25;
209 | end_object_pose.position.y = 0.15;
210 | end_object_pose.position.z = 0.02;
211 |
212 | // Orientation
213 | double angle = M_PI / 1.5;
214 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
215 | start_object_pose.orientation.x = quat.x();
216 | start_object_pose.orientation.y = quat.y();
217 | start_object_pose.orientation.z = quat.z();
218 | start_object_pose.orientation.w = quat.w();
219 |
220 | angle = M_PI / 1.1;
221 | quat = Eigen::Quaterniond(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
222 | end_object_pose.orientation.x = quat.x();
223 | end_object_pose.orientation.y = quat.y();
224 | end_object_pose.orientation.z = quat.z();
225 | end_object_pose.orientation.w = quat.w();
226 |
227 | // Choose which object to test
228 | object_pose = start_object_pose;
229 | }
230 |
231 | void generateRandomObject(geometry_msgs::Pose& object_pose)
232 | {
233 | // Position
234 | object_pose.position.x = visual_tools_->dRand(0.7,TABLE_DEPTH);
235 | object_pose.position.y = visual_tools_->dRand(-TABLE_WIDTH/2,-0.1);
236 | object_pose.position.z = TABLE_Z + TABLE_HEIGHT / 2.0 + BLOCK_SIZE / 2.0;
237 |
238 | // Orientation
239 | double angle = M_PI * visual_tools_->dRand(0.1,1);
240 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
241 | object_pose.orientation.x = quat.x();
242 | object_pose.orientation.y = quat.y();
243 | object_pose.orientation.z = quat.z();
244 | object_pose.orientation.w = quat.w();
245 | }
246 |
247 | }; // end of class
248 |
249 | } // namespace
250 |
251 |
252 | int main(int argc, char *argv[])
253 | {
254 | int num_tests = 5;
255 |
256 | ros::init(argc, argv, "grasp_generator_test");
257 |
258 | // Allow the action server to recieve and send ros messages
259 | ros::AsyncSpinner spinner(2);
260 | spinner.start();
261 |
262 | // Check for verbose flag
263 | bool verbose = false;
264 | if (argc > 1)
265 | {
266 | for (std::size_t i = 0; i < argc; ++i)
267 | {
268 | if (strcmp(argv[i], "--verbose") == 0)
269 | {
270 | ROS_INFO_STREAM_NAMED("main","Running in VERBOSE mode (much slower)");
271 | verbose = true;
272 | }
273 | }
274 | }
275 |
276 | // Seed random
277 | srand(ros::Time::now().toSec());
278 |
279 | // Benchmark time
280 | ros::Time start_time;
281 | start_time = ros::Time::now();
282 |
283 | // Run Tests
284 | moveit_simple_grasps::GraspGeneratorTest tester(num_tests);
285 |
286 | // Benchmark time
287 | double duration = (ros::Time::now() - start_time).toNSec() * 1e-6;
288 | ROS_INFO_STREAM_NAMED("","Total time: " << duration);
289 | std::cout << duration << "\t" << num_tests << std::endl;
290 |
291 | ros::Duration(1.0).sleep(); // let rviz markers finish publishing
292 |
293 | return 0;
294 | }
295 |
--------------------------------------------------------------------------------
/src/grasp_filter.cpp:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2013, University of Colorado, Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of the Univ of CO, Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | #include
36 | #include
37 |
38 | // Conversions
39 | #include // add to pkg TODO
40 |
41 | namespace moveit_simple_grasps
42 | {
43 |
44 | // Constructor
45 | GraspFilter::GraspFilter( robot_state::RobotState robot_state,
46 | moveit_visual_tools::MoveItVisualToolsPtr& visual_tools ):
47 | robot_state_(robot_state),
48 | visual_tools_(visual_tools),
49 | verbose_(false)
50 | {
51 | ROS_DEBUG_STREAM_NAMED("filter","Loaded simple grasp filter");
52 | }
53 |
54 | GraspFilter::~GraspFilter()
55 | {
56 | }
57 |
58 | bool GraspFilter::chooseBestGrasp( const std::vector& possible_grasps, moveit_msgs::Grasp& chosen )
59 | {
60 | // TODO: better logic here
61 | if( possible_grasps.empty() )
62 | {
63 | ROS_ERROR_NAMED("filter","There are no grasps to choose from");
64 | return false;
65 | }
66 | chosen = possible_grasps[0]; // just choose first one
67 | return true;
68 | }
69 |
70 | // Return grasps that are kinematically feasible
71 | bool GraspFilter::filterGrasps(std::vector& possible_grasps,
72 | std::vector& ik_solutions, bool filter_pregrasp,
73 | const std::string &ee_parent_link, const std::string& planning_group)
74 | {
75 | // -----------------------------------------------------------------------------------------------
76 | // Error check
77 | if( possible_grasps.empty() )
78 | {
79 | ROS_ERROR_NAMED("filter","Unable to filter grasps because vector is empty");
80 | return false;
81 | }
82 |
83 | // -----------------------------------------------------------------------------------------------
84 | // how many cores does this computer have and how many do we need?
85 | int num_threads = boost::thread::hardware_concurrency();
86 | if( num_threads > possible_grasps.size() )
87 | num_threads = possible_grasps.size();
88 |
89 | if(false)
90 | {
91 | num_threads = 1;
92 | ROS_WARN_STREAM_NAMED("grasp_filter","Using only " << num_threads << " threads");
93 | }
94 |
95 | // -----------------------------------------------------------------------------------------------
96 | // Get the solver timeout from kinematics.yaml
97 | double timeout = robot_state_.getRobotModel()->getJointModelGroup( planning_group )->getDefaultIKTimeout();
98 | timeout = 0.05;
99 | ROS_DEBUG_STREAM_NAMED("grasp_filter","Grasp filter IK timeout " << timeout);
100 |
101 | // -----------------------------------------------------------------------------------------------
102 | // Load kinematic solvers if not already loaded
103 | if( kin_solvers_[planning_group].size() != num_threads )
104 | {
105 | kin_solvers_[planning_group].clear();
106 |
107 | const robot_model::JointModelGroup* jmg = robot_state_.getRobotModel()->getJointModelGroup(planning_group);
108 |
109 | // Create an ik solver for every thread
110 | for (int i = 0; i < num_threads; ++i)
111 | {
112 | //ROS_INFO_STREAM_NAMED("filter","Creating ik solver " << i);
113 |
114 | kin_solvers_[planning_group].push_back(jmg->getSolverInstance());
115 |
116 | // Test to make sure we have a valid kinematics solver
117 | if( !kin_solvers_[planning_group][i] )
118 | {
119 | ROS_ERROR_STREAM_NAMED("grasp_filter","No kinematic solver found");
120 | return false;
121 | }
122 | }
123 | }
124 |
125 | // Transform poses -------------------------------------------------------------------------------
126 | // bring the pose to the frame of the IK solver
127 | const std::string &ik_frame = kin_solvers_[planning_group][0]->getBaseFrame();
128 | Eigen::Affine3d link_transform;
129 | if (!moveit::core::Transforms::sameFrame(ik_frame, robot_state_.getRobotModel()->getModelFrame()))
130 | {
131 | const robot_model::LinkModel *lm = robot_state_.getLinkModel((!ik_frame.empty() && ik_frame[0] == '/') ? ik_frame.substr(1) : ik_frame);
132 | if (!lm)
133 | return false;
134 | //pose = getGlobalLinkTransform(lm).inverse() * pose;
135 | link_transform = robot_state_.getGlobalLinkTransform(lm).inverse();
136 | }
137 |
138 | // Benchmark time
139 | ros::Time start_time;
140 | start_time = ros::Time::now();
141 |
142 | // -----------------------------------------------------------------------------------------------
143 | // Loop through poses and find those that are kinematically feasible
144 | std::vector filtered_grasps;
145 |
146 | boost::thread_group bgroup; // create a group of threads
147 | boost::mutex lock; // used for sharing the same data structures
148 |
149 | ROS_INFO_STREAM_NAMED("filter", "Filtering possible grasps with " << num_threads << " threads");
150 |
151 | // split up the work between threads
152 | double num_grasps_per_thread = double(possible_grasps.size()) / num_threads;
153 | //ROS_INFO_STREAM("total grasps " << possible_grasps.size() << " per thead: " << num_grasps_per_thread);
154 |
155 | int grasps_id_start;
156 | int grasps_id_end = 0;
157 |
158 | for(int i = 0; i < num_threads; ++i)
159 | {
160 | grasps_id_start = grasps_id_end;
161 | grasps_id_end = ceil(num_grasps_per_thread*(i+1));
162 | if( grasps_id_end >= possible_grasps.size() )
163 | grasps_id_end = possible_grasps.size();
164 | //ROS_INFO_STREAM_NAMED("filter","low " << grasps_id_start << " high " << grasps_id_end);
165 |
166 | IkThreadStruct tc(possible_grasps, filtered_grasps, ik_solutions, link_transform, grasps_id_start,
167 | grasps_id_end, kin_solvers_[planning_group][i], filter_pregrasp, ee_parent_link, timeout, &lock, i);
168 | bgroup.create_thread( boost::bind( &GraspFilter::filterGraspThread, this, tc ) );
169 | }
170 |
171 | ROS_DEBUG_STREAM_NAMED("filter","Waiting to join " << num_threads << " ik threads...");
172 | bgroup.join_all(); // wait for all threads to finish
173 |
174 | ROS_INFO_STREAM_NAMED("filter", "Grasp filter complete, found " << filtered_grasps.size() << " IK solutions out of " <<
175 | possible_grasps.size() );
176 |
177 | possible_grasps = filtered_grasps;
178 |
179 | if (verbose_)
180 | {
181 | // End Benchmark time
182 | double duration = (ros::Time::now() - start_time).toNSec() * 1e-6;
183 | ROS_INFO_STREAM_NAMED("filter","Grasp generator IK grasp filtering benchmark time:");
184 | std::cout << duration << "\t" << possible_grasps.size() << "\n";
185 |
186 | ROS_INFO_STREAM_NAMED("filter","Possible grasps filtered to " << possible_grasps.size() << " options.");
187 | }
188 |
189 | return true;
190 | }
191 |
192 | void GraspFilter::filterGraspThread(IkThreadStruct ik_thread_struct)
193 | {
194 | // Seed state - start at zero
195 | std::vector ik_seed_state(7); // fill with zeros
196 | // TODO do not assume 7 dof
197 |
198 | std::vector solution;
199 | moveit_msgs::MoveItErrorCodes error_code;
200 | geometry_msgs::PoseStamped ik_pose;
201 |
202 | // Process the assigned grasps
203 | for( int i = ik_thread_struct.grasps_id_start_; i < ik_thread_struct.grasps_id_end_; ++i )
204 | {
205 | //ROS_DEBUG_STREAM_NAMED("filter", "Checking grasp #" << i);
206 |
207 | // Clear out previous solution just in case - not sure if this is needed
208 | solution.clear();
209 |
210 | // Transform current pose to frame of planning group
211 | ik_pose = ik_thread_struct.possible_grasps_[i].grasp_pose;
212 | Eigen::Affine3d eigen_pose;
213 | tf::poseMsgToEigen(ik_pose.pose, eigen_pose);
214 | eigen_pose = ik_thread_struct.link_transform_ * eigen_pose;
215 | tf::poseEigenToMsg(eigen_pose, ik_pose.pose);
216 |
217 | // Test it with IK
218 | ik_thread_struct.kin_solver_->
219 | searchPositionIK(ik_pose.pose, ik_seed_state, ik_thread_struct.timeout_, solution, error_code);
220 |
221 | // Results
222 | if( error_code.val == moveit_msgs::MoveItErrorCodes::SUCCESS )
223 | {
224 | //ROS_INFO_STREAM_NAMED("filter","Found IK Solution");
225 |
226 | // Copy solution to seed state so that next solution is faster
227 | ik_seed_state = solution;
228 |
229 | // Start pre-grasp section ----------------------------------------------------------
230 | if (ik_thread_struct.filter_pregrasp_) // optionally check the pregrasp
231 | {
232 | // Convert to a pre-grasp
233 | ik_pose = SimpleGrasps::getPreGraspPose(ik_thread_struct.possible_grasps_[i], ik_thread_struct.ee_parent_link_);
234 |
235 | // Transform current pose to frame of planning group
236 | Eigen::Affine3d eigen_pose;
237 | tf::poseMsgToEigen(ik_pose.pose, eigen_pose);
238 | eigen_pose = ik_thread_struct.link_transform_ * eigen_pose;
239 | tf::poseEigenToMsg(eigen_pose, ik_pose.pose);
240 |
241 | // Test it with IK
242 | ik_thread_struct.kin_solver_->
243 | searchPositionIK(ik_pose.pose, ik_seed_state, ik_thread_struct.timeout_, solution, error_code);
244 |
245 | // Results
246 | if( error_code.val == moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION )
247 | {
248 | ROS_WARN_STREAM_NAMED("filter","Unable to find IK solution for pre-grasp pose.");
249 | continue;
250 | }
251 | else if( error_code.val == moveit_msgs::MoveItErrorCodes::TIMED_OUT )
252 | {
253 | //ROS_DEBUG_STREAM_NAMED("filter","Unable to find IK solution for pre-grasp pose: Timed Out.");
254 | continue;
255 | }
256 | else if( error_code.val != moveit_msgs::MoveItErrorCodes::SUCCESS )
257 | {
258 | ROS_INFO_STREAM_NAMED("filter","IK solution error for pre-grasp: MoveItErrorCodes.msg = " << error_code);
259 | continue;
260 | }
261 | }
262 | // Both grasp and pre-grasp have passed
263 | // Lock the result vector so we can add to it for a second
264 | {
265 | boost::mutex::scoped_lock slock(*ik_thread_struct.lock_);
266 | ik_thread_struct.filtered_grasps_.push_back( ik_thread_struct.possible_grasps_[i] );
267 |
268 | trajectory_msgs::JointTrajectoryPoint point;
269 | //point.positions = ik_seed_state; // show the grasp solution
270 | point.positions = solution; // show the pre-grasp solution
271 |
272 | // Copy solution so that we can optionally use it later
273 | ik_thread_struct.ik_solutions_.push_back(point);
274 | }
275 |
276 | // End pre-grasp section -------------------------------------------------------
277 | }
278 | else if( error_code.val == moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION )
279 | ROS_WARN_STREAM_NAMED("filter","Unable to find IK solution for pose.");
280 | else if( error_code.val == moveit_msgs::MoveItErrorCodes::TIMED_OUT )
281 | {
282 | //ROS_DEBUG_STREAM_NAMED("filter","Unable to find IK solution for pose: Timed Out.");
283 | }
284 | else
285 | ROS_INFO_STREAM_NAMED("filter","IK solution error: MoveItErrorCodes.msg = " << error_code);
286 | }
287 |
288 | //ROS_DEBUG_STREAM_NAMED("filter","Thread " << ik_thread_struct.thread_id_ << " finished");
289 | }
290 |
291 | } // namespace
292 |
--------------------------------------------------------------------------------
/src/grasp_data.cpp:
--------------------------------------------------------------------------------
1 | /*
2 | * Software License Agreement (Modified BSD License)
3 | *
4 | * Copyright (c) 2014, University of Colorado, Boulder, PAL Robotics, S.L.
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of Univ of CO, Boulder, PAL Robotics, S.L.
18 | * nor the names of its contributors may be used to endorse or
19 | * promote products derived from this software without specific
20 | * prior written permission.
21 | *
22 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
23 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
24 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
25 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
26 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
27 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
28 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
29 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
30 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
31 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
32 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
33 | * POSSIBILITY OF SUCH DAMAGE.
34 | */
35 |
36 | /* Authors: Bence Magyar, Dave Coleman
37 | Description: Data class used by the grasp generator.
38 | */
39 |
40 | #include
41 |
42 | // Eigen
43 | #include
44 | #include
45 | #include
46 |
47 | // C++
48 | #include
49 | #define _USE_MATH_DEFINES
50 |
51 | namespace moveit_simple_grasps
52 | {
53 | GraspData::GraspData() :
54 | // Fill in default values where possible:
55 | base_link_("/base_link"),
56 | grasp_depth_(0.12),
57 | angle_resolution_(16),
58 | approach_retreat_desired_dist_(0.6),
59 | approach_retreat_min_dist_(0.4),
60 | object_size_(0.04)
61 | {}
62 |
63 | bool GraspData::loadRobotGraspData(const ros::NodeHandle& nh, const std::string& end_effector)
64 | {
65 | std::vector joint_names;
66 | std::vector pre_grasp_posture; // todo: remove all underscore post-fixes
67 | std::vector grasp_posture;
68 | std::vector grasp_pose_to_eef;
69 | std::vector grasp_pose_to_eef_rotation;
70 | double pregrasp_time_from_start;
71 | double grasp_time_from_start;
72 | std::string end_effector_name;
73 | std::string end_effector_parent_link;
74 |
75 | // Load a param
76 | if (!nh.hasParam("base_link"))
77 | {
78 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `base_link` missing from rosparam server. Did you load your end effector's configuration yaml file? Searching in namespace: " << nh.getNamespace());
79 | return false;
80 | }
81 | nh.getParam("base_link", base_link_);
82 |
83 | // Search within the sub-namespace of this end effector name
84 | ros::NodeHandle child_nh(nh, end_effector);
85 |
86 | // Load a param
87 | if (!child_nh.hasParam("pregrasp_time_from_start"))
88 | {
89 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `pregrasp_time_from_start` missing from rosparam server. Did you load your end effector's configuration yaml file? Searching in namespace: " << child_nh.getNamespace());
90 | return false;
91 | }
92 | child_nh.getParam("pregrasp_time_from_start", pregrasp_time_from_start);
93 |
94 | // Load a param
95 | if (!child_nh.hasParam("grasp_time_from_start"))
96 | {
97 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `grasp_time_from_start` missing from rosparam server. Did you load your end effector's configuration yaml file?");
98 | return false;
99 | }
100 | child_nh.getParam("grasp_time_from_start", grasp_time_from_start);
101 |
102 | // Load a param
103 | if (!child_nh.hasParam("end_effector_name"))
104 | {
105 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `end_effector_name` missing from rosparam server. Did you load your end effector's configuration yaml file?");
106 | return false;
107 | }
108 | child_nh.getParam("end_effector_name", end_effector_name);
109 |
110 | // Load a param
111 | if (!child_nh.hasParam("end_effector_parent_link"))
112 | {
113 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `end_effector_parent_link` missing from rosparam server. Did you load your end effector's configuration yaml file?");
114 | return false;
115 | }
116 | child_nh.getParam("end_effector_parent_link", end_effector_parent_link);
117 |
118 | // Load a param
119 | if (!child_nh.hasParam("joints"))
120 | {
121 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `joints` missing from rosparam server. Did you load your end effector's configuration yaml file?");
122 | return false;
123 | }
124 | XmlRpc::XmlRpcValue joint_list;
125 | child_nh.getParam("joints", joint_list);
126 | if (joint_list.getType() == XmlRpc::XmlRpcValue::TypeArray)
127 | for (int32_t i = 0; i < joint_list.size(); ++i)
128 | {
129 | ROS_ASSERT(joint_list[i].getType() == XmlRpc::XmlRpcValue::TypeString);
130 | joint_names.push_back(static_cast(joint_list[i]));
131 | }
132 | else
133 | ROS_ERROR_STREAM_NAMED("temp","joint list type is not type array???");
134 |
135 | if(child_nh.hasParam("pregrasp_posture"))
136 | {
137 | XmlRpc::XmlRpcValue preg_posture_list;
138 | child_nh.getParam("pregrasp_posture", preg_posture_list);
139 | ROS_ASSERT(preg_posture_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
140 | for (int32_t i = 0; i < preg_posture_list.size(); ++i)
141 | {
142 | ROS_ASSERT(preg_posture_list[i].getType() == XmlRpc::XmlRpcValue::TypeDouble);
143 | pre_grasp_posture.push_back(static_cast(preg_posture_list[i]));
144 | }
145 | }
146 |
147 | ROS_ASSERT(child_nh.hasParam("grasp_posture"));
148 | XmlRpc::XmlRpcValue grasp_posture_list;
149 | child_nh.getParam("grasp_posture", grasp_posture_list);
150 | ROS_ASSERT(grasp_posture_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
151 | for (int32_t i = 0; i < grasp_posture_list.size(); ++i)
152 | {
153 | ROS_ASSERT(grasp_posture_list[i].getType() == XmlRpc::XmlRpcValue::TypeDouble);
154 | grasp_posture.push_back(static_cast(grasp_posture_list[i]));
155 | }
156 |
157 | ROS_ASSERT(child_nh.hasParam("grasp_pose_to_eef"));
158 | XmlRpc::XmlRpcValue g_to_eef_list;
159 | child_nh.getParam("grasp_pose_to_eef", g_to_eef_list);
160 | ROS_ASSERT(g_to_eef_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
161 | for (int32_t i = 0; i < g_to_eef_list.size(); ++i)
162 | {
163 | // Cast to double OR int
164 | if (g_to_eef_list[i].getType() != XmlRpc::XmlRpcValue::TypeDouble)
165 | {
166 | if (g_to_eef_list[i].getType() != XmlRpc::XmlRpcValue::TypeInt )
167 | {
168 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `grasp_pose_to_eef` wrong data type - int or double required.");
169 | return false;
170 | }
171 | else
172 | grasp_pose_to_eef.push_back(static_cast(g_to_eef_list[i]));
173 | }
174 | else
175 | grasp_pose_to_eef.push_back(static_cast(g_to_eef_list[i]));
176 | }
177 |
178 | ROS_ASSERT(child_nh.hasParam("grasp_pose_to_eef_rotation"));
179 | XmlRpc::XmlRpcValue g_to_eef_rotation_list;
180 | child_nh.getParam("grasp_pose_to_eef_rotation", g_to_eef_rotation_list);
181 | ROS_ASSERT(g_to_eef_rotation_list.getType() == XmlRpc::XmlRpcValue::TypeArray);
182 | for (int32_t i = 0; i < g_to_eef_rotation_list.size(); ++i)
183 | {
184 | // Cast to double OR int
185 | if (g_to_eef_rotation_list[i].getType() != XmlRpc::XmlRpcValue::TypeDouble)
186 | {
187 | if (g_to_eef_rotation_list[i].getType() != XmlRpc::XmlRpcValue::TypeInt )
188 | {
189 | ROS_ERROR_STREAM_NAMED("grasp_data_loader","Grasp configuration parameter `grasp_pose_to_eef_rotation` wrong data type - int or double required.");
190 | return false;
191 | }
192 | else
193 | grasp_pose_to_eef_rotation.push_back(static_cast(g_to_eef_rotation_list[i]));
194 | }
195 | else
196 | grasp_pose_to_eef_rotation.push_back(static_cast(g_to_eef_rotation_list[i]));
197 | }
198 |
199 | // -------------------------------
200 | // Convert generic grasp pose to this end effector's frame of reference, approach direction for short
201 |
202 | // Orientation
203 | ROS_ASSERT(grasp_pose_to_eef_rotation.size() == 3);
204 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(grasp_pose_to_eef_rotation[1]), Eigen::Vector3d::UnitY())); // turn on Z axis
205 | // TODO: rotate for roll and yaw also, not just pitch (unit y)
206 | // but i don't need that feature right now and it might be tricky
207 | grasp_pose_to_eef_pose_.orientation.x = quat.x();
208 | grasp_pose_to_eef_pose_.orientation.y = quat.y();
209 | grasp_pose_to_eef_pose_.orientation.z = quat.z();
210 | grasp_pose_to_eef_pose_.orientation.w = quat.w();
211 |
212 | // Position // approach vector?
213 | ROS_ASSERT(grasp_pose_to_eef.size() == 3);
214 | grasp_pose_to_eef_pose_.position.x = grasp_pose_to_eef[0];
215 | grasp_pose_to_eef_pose_.position.y = grasp_pose_to_eef[1];
216 | grasp_pose_to_eef_pose_.position.z = grasp_pose_to_eef[2];
217 |
218 | // -------------------------------
219 | // Create pre-grasp posture if specified
220 | if(!pre_grasp_posture.empty())
221 | {
222 | pre_grasp_posture_.header.frame_id = base_link_;
223 | pre_grasp_posture_.header.stamp = ros::Time::now();
224 | // Name of joints:
225 | pre_grasp_posture_.joint_names = joint_names;
226 | // Position of joints
227 | pre_grasp_posture_.points.resize(1);
228 | pre_grasp_posture_.points[0].positions = pre_grasp_posture;
229 | pre_grasp_posture_.points[0].time_from_start = ros::Duration(pregrasp_time_from_start);
230 | }
231 | // -------------------------------
232 | // Create grasp posture
233 | grasp_posture_.header.frame_id = base_link_;
234 | grasp_posture_.header.stamp = ros::Time::now();
235 | // Name of joints:
236 | grasp_posture_.joint_names = joint_names;
237 | // Position of joints
238 | grasp_posture_.points.resize(1);
239 | grasp_posture_.points[0].positions = grasp_posture;
240 | grasp_posture_.points[0].time_from_start = ros::Duration(grasp_time_from_start);
241 |
242 | // -------------------------------
243 | // SRDF Info
244 | ee_parent_link_ = end_effector_parent_link;
245 | ee_group_ = end_effector_name;
246 |
247 | // -------------------------------
248 | // Nums
249 | approach_retreat_desired_dist_ = 0.2; // 0.3;
250 | approach_retreat_min_dist_ = 0.06;
251 | // distance from center point of object to end effector
252 | grasp_depth_ = 0.06;// in negative or 0 this makes the grasps on the other side of the object! (like from below)
253 |
254 | // generate grasps at PI/angle_resolution increments
255 | angle_resolution_ = 16; //TODO parametrize this, or move to action interface
256 |
257 | // Debug
258 | //moveit_simple_grasps::SimpleGrasps::printObjectGraspData(grasp_data);
259 |
260 | return true;
261 | }
262 |
263 | bool GraspData::setRobotStatePreGrasp( robot_state::RobotStatePtr &robot_state )
264 | {
265 | return setRobotState( robot_state, pre_grasp_posture_ );
266 | }
267 | bool GraspData::setRobotStateGrasp( robot_state::RobotStatePtr &robot_state )
268 | {
269 | return setRobotState( robot_state, grasp_posture_ );
270 | }
271 |
272 | bool GraspData::setRobotState( robot_state::RobotStatePtr &robot_state, const trajectory_msgs::JointTrajectory &posture )
273 | {
274 | // Do for every joint in end effector
275 | for (std::size_t i = 0; i < posture.joint_names.size(); ++i)
276 | {
277 | // Debug
278 | std::cout << "Setting joint " << posture.joint_names[i] << " to value "
279 | << posture.points[i].positions[0] << std::endl;
280 |
281 | // Set joint position
282 | robot_state->setJointPositions( posture.joint_names[i],
283 | posture.points[i].positions );
284 | }
285 | }
286 |
287 | void GraspData::print()
288 | {
289 | ROS_WARN_STREAM_NAMED("grasp_data","Debug Grasp Data variable values:");
290 | std::cout << "grasp_pose_to_eef_pose_: \n" <
36 |
37 | namespace moveit_simple_grasps
38 | {
39 |
40 | // Constructor
41 | SimpleGrasps::SimpleGrasps(moveit_visual_tools::MoveItVisualToolsPtr visual_tools, bool verbose) :
42 | visual_tools_(visual_tools),
43 | verbose_(verbose)
44 | {
45 | ROS_DEBUG_STREAM_NAMED("grasps","Loaded simple grasp generator");
46 | }
47 |
48 | // Deconstructor
49 | SimpleGrasps::~SimpleGrasps()
50 | {
51 | }
52 |
53 | // Create all possible grasp positions for a object
54 | bool SimpleGrasps::generateBlockGrasps(const geometry_msgs::Pose& object_pose, const GraspData& grasp_data,
55 | std::vector& possible_grasps)
56 | {
57 | // ---------------------------------------------------------------------------------------------
58 | // Calculate grasps in two axis in both directions
59 | generateAxisGrasps( object_pose, X_AXIS, DOWN, HALF, 0, grasp_data, possible_grasps); // got no grasps with this alone
60 | generateAxisGrasps( object_pose, X_AXIS, UP, HALF, 0, grasp_data, possible_grasps); // gives some grasps... looks ugly
61 | generateAxisGrasps( object_pose, Y_AXIS, DOWN, HALF, 0, grasp_data, possible_grasps); // GOOD ONES!
62 | generateAxisGrasps( object_pose, Y_AXIS, UP, HALF, 0, grasp_data, possible_grasps); // gave a grasp from top... bad
63 |
64 | return true;
65 | }
66 |
67 | // Create grasp positions in one axis
68 | bool SimpleGrasps::generateAxisGrasps(
69 | const geometry_msgs::Pose& object_pose,
70 | grasp_axis_t axis,
71 | grasp_direction_t direction,
72 | grasp_rotation_t rotation,
73 | double hand_roll,
74 | const GraspData& grasp_data,
75 | std::vector& possible_grasps)
76 | {
77 | // ---------------------------------------------------------------------------------------------
78 | // Create a transform from the object's frame (center of object) to /base_link
79 | tf::poseMsgToEigen(object_pose, object_global_transform_);
80 |
81 | // ---------------------------------------------------------------------------------------------
82 | // Grasp parameters
83 |
84 | // Create re-usable approach motion
85 | moveit_msgs::GripperTranslation pre_grasp_approach;
86 | pre_grasp_approach.direction.header.stamp = ros::Time::now();
87 | pre_grasp_approach.desired_distance = grasp_data.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
88 | pre_grasp_approach.min_distance = grasp_data.approach_retreat_min_dist_; // half of the desired? Untested.
89 |
90 | // Create re-usable retreat motion
91 | moveit_msgs::GripperTranslation post_grasp_retreat;
92 | post_grasp_retreat.direction.header.stamp = ros::Time::now();
93 | post_grasp_retreat.desired_distance = grasp_data.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
94 | post_grasp_retreat.min_distance = grasp_data.approach_retreat_min_dist_; // half of the desired? Untested.
95 |
96 | // Create re-usable blank pose
97 | geometry_msgs::PoseStamped grasp_pose_msg;
98 | grasp_pose_msg.header.stamp = ros::Time::now();
99 | grasp_pose_msg.header.frame_id = grasp_data.base_link_;
100 |
101 | // ---------------------------------------------------------------------------------------------
102 | // Angle calculations
103 | double radius = grasp_data.grasp_depth_; //0.12
104 | double xb;
105 | double yb = 0.0; // stay in the y plane of the object
106 | double zb;
107 | double theta1 = 0.0; // Where the point is located around the object
108 | double theta2 = 0.0; // UP 'direction'
109 |
110 | // Gripper direction (UP/DOWN) rotation. UP set by default
111 | if( direction == DOWN )
112 | {
113 | theta2 = M_PI;
114 | }
115 |
116 | // ---------------------------------------------------------------------------------------------
117 | // ---------------------------------------------------------------------------------------------
118 | // Begin Grasp Generator Loop
119 | // ---------------------------------------------------------------------------------------------
120 | // ---------------------------------------------------------------------------------------------
121 |
122 | /* Developer Note:
123 | * Create angles 180 degrees around the chosen axis at given resolution
124 | * We create the grasps in the reference frame of the object, then later convert it to the base link
125 | */
126 | for(int i = 0; i <= grasp_data.angle_resolution_; ++i)
127 | {
128 | // Create a Grasp message
129 | moveit_msgs::Grasp new_grasp;
130 |
131 | // Calculate grasp pose
132 | xb = radius*cos(theta1);
133 | zb = radius*sin(theta1);
134 |
135 | Eigen::Affine3d grasp_pose;
136 |
137 | switch(axis)
138 | {
139 | case X_AXIS:
140 | grasp_pose = Eigen::AngleAxisd(theta1, Eigen::Vector3d::UnitX())
141 | * Eigen::AngleAxisd(-0.5*M_PI, Eigen::Vector3d::UnitZ())
142 | * Eigen::AngleAxisd(theta2, Eigen::Vector3d::UnitX()); // Flip 'direction'
143 |
144 | grasp_pose.translation() = Eigen::Vector3d( yb, xb ,zb);
145 |
146 | break;
147 | case Y_AXIS:
148 | grasp_pose =
149 | Eigen::AngleAxisd(M_PI - theta1, Eigen::Vector3d::UnitY())
150 | *Eigen::AngleAxisd(theta2, Eigen::Vector3d::UnitX()); // Flip 'direction'
151 |
152 | grasp_pose.translation() = Eigen::Vector3d( xb, yb ,zb);
153 |
154 | break;
155 | case Z_AXIS:
156 | grasp_pose =
157 | Eigen::AngleAxisd(M_PI - theta1, Eigen::Vector3d::UnitZ())
158 | *Eigen::AngleAxisd(theta2, Eigen::Vector3d::UnitX()); // Flip 'direction'
159 |
160 | grasp_pose.translation() = Eigen::Vector3d( xb, yb ,zb);
161 |
162 | break;
163 | }
164 |
165 | /* The estimated probability of success for this grasp, or some other measure of how "good" it is.
166 | * Here we base bias the score based on how far the wrist is from the surface, preferring a greater
167 | * distance to prevent wrist/end effector collision with the table
168 | */
169 | double score = sin(theta1);
170 | new_grasp.grasp_quality = std::max(score,0.1); // don't allow score to drop below 0.1 b/c all grasps are ok
171 |
172 | // Calculate the theta1 for next time
173 | if (rotation == HALF)
174 | theta1 += M_PI / grasp_data.angle_resolution_;
175 | else
176 | {
177 | theta1 += 2*M_PI / grasp_data.angle_resolution_;
178 | }
179 |
180 | // A name for this grasp
181 | static int grasp_id = 0;
182 | new_grasp.id = "Grasp" + boost::lexical_cast(grasp_id);
183 | ++grasp_id;
184 |
185 | // PreGrasp and Grasp Postures --------------------------------------------------------------------------
186 |
187 | // The internal posture of the hand for the pre-grasp only positions are used
188 | new_grasp.pre_grasp_posture = grasp_data.pre_grasp_posture_;
189 |
190 | // The internal posture of the hand for the grasp positions and efforts are used
191 | new_grasp.grasp_posture = grasp_data.grasp_posture_;
192 |
193 | // Grasp ------------------------------------------------------------------------------------------------
194 |
195 |
196 | // DEBUG - show original grasp pose before tranform to gripper frame
197 | if( verbose_ )
198 | {
199 | tf::poseEigenToMsg(object_global_transform_ * grasp_pose, grasp_pose_msg.pose);
200 | visual_tools_->publishArrow(grasp_pose_msg.pose, rviz_visual_tools::GREEN);
201 | }
202 |
203 | // ------------------------------------------------------------------------
204 | // Optionally roll wrist with respect to object pose
205 | Eigen::Affine3d roll_gripper;
206 | roll_gripper = Eigen::AngleAxisd(hand_roll, Eigen::Vector3d::UnitX());
207 | grasp_pose = grasp_pose * roll_gripper;
208 |
209 | // ------------------------------------------------------------------------
210 | // Change grasp to frame of reference of this custom end effector
211 |
212 | // Convert to Eigen
213 | Eigen::Affine3d eef_conversion_pose;
214 | tf::poseMsgToEigen(grasp_data.grasp_pose_to_eef_pose_, eef_conversion_pose);
215 |
216 | // Transform the grasp pose
217 | grasp_pose = grasp_pose * eef_conversion_pose;
218 |
219 | // ------------------------------------------------------------------------
220 | // Convert pose to global frame (base_link)
221 | tf::poseEigenToMsg(object_global_transform_ * grasp_pose, grasp_pose_msg.pose);
222 |
223 | // The position of the end-effector for the grasp relative to a reference frame (that is always specified elsewhere, not in this message)
224 | new_grasp.grasp_pose = grasp_pose_msg;
225 |
226 | // Other ------------------------------------------------------------------------------------------------
227 |
228 | // the maximum contact force to use while grasping (<=0 to disable)
229 | new_grasp.max_contact_force = 0;
230 |
231 | // -------------------------------------------------------------------------------------------------------
232 | // -------------------------------------------------------------------------------------------------------
233 | // Approach and retreat
234 | // -------------------------------------------------------------------------------------------------------
235 | // -------------------------------------------------------------------------------------------------------
236 |
237 | // Straight down ---------------------------------------------------------------------------------------
238 | // With respect to the base link/world frame
239 |
240 | // Approach
241 | pre_grasp_approach.direction.header.frame_id = grasp_data.base_link_;
242 | pre_grasp_approach.direction.vector.x = 0;
243 | pre_grasp_approach.direction.vector.y = 0;
244 | pre_grasp_approach.direction.vector.z = -1; // Approach direction (negative z axis) // TODO: document this assumption
245 | new_grasp.pre_grasp_approach = pre_grasp_approach;
246 |
247 | // Retreat
248 | post_grasp_retreat.direction.header.frame_id = grasp_data.base_link_;
249 | post_grasp_retreat.direction.vector.x = 0;
250 | post_grasp_retreat.direction.vector.y = 0;
251 | post_grasp_retreat.direction.vector.z = 1; // Retreat direction (pos z axis)
252 | new_grasp.post_grasp_retreat = post_grasp_retreat;
253 |
254 | // Add to vector
255 | possible_grasps.push_back(new_grasp);
256 |
257 | // Angled with pose -------------------------------------------------------------------------------------
258 | // Approach with respect to end effector orientation
259 |
260 | // Approach
261 | pre_grasp_approach.direction.header.frame_id = grasp_data.ee_parent_link_;
262 | pre_grasp_approach.direction.vector.x = 0;
263 | pre_grasp_approach.direction.vector.y = 0;
264 | pre_grasp_approach.direction.vector.z = 1;
265 | new_grasp.pre_grasp_approach = pre_grasp_approach;
266 |
267 | // Retreat
268 | post_grasp_retreat.direction.header.frame_id = grasp_data.ee_parent_link_;
269 | post_grasp_retreat.direction.vector.x = 0;
270 | post_grasp_retreat.direction.vector.y = 0;
271 | post_grasp_retreat.direction.vector.z = -1;
272 | new_grasp.post_grasp_retreat = post_grasp_retreat;
273 |
274 | // Add to vector
275 | possible_grasps.push_back(new_grasp);
276 |
277 | }
278 |
279 | ROS_INFO_STREAM_NAMED("grasp", "Generated " << possible_grasps.size() << " grasps." );
280 |
281 | return true;
282 | }
283 |
284 | geometry_msgs::PoseStamped SimpleGrasps::getPreGraspPose(const moveit_msgs::Grasp &grasp, const std::string &ee_parent_link)
285 | {
286 | // Grasp Pose Variables
287 | geometry_msgs::PoseStamped grasp_pose = grasp.grasp_pose;
288 | Eigen::Affine3d grasp_pose_eigen;
289 | tf::poseMsgToEigen(grasp_pose.pose, grasp_pose_eigen);
290 |
291 | // Get pre-grasp pose first
292 | geometry_msgs::PoseStamped pre_grasp_pose;
293 | Eigen::Affine3d pre_grasp_pose_eigen = grasp_pose_eigen; // Copy original grasp pose to pre-grasp pose
294 |
295 | // Approach direction variables
296 | Eigen::Vector3d pre_grasp_approach_direction_local;
297 |
298 | // The direction of the pre-grasp
299 | // Calculate the current animation position based on the percent
300 | Eigen::Vector3d pre_grasp_approach_direction = Eigen::Vector3d(
301 | -1 * grasp.pre_grasp_approach.direction.vector.x * grasp.pre_grasp_approach.desired_distance,
302 | -1 * grasp.pre_grasp_approach.direction.vector.y * grasp.pre_grasp_approach.desired_distance,
303 | -1 * grasp.pre_grasp_approach.direction.vector.z * grasp.pre_grasp_approach.desired_distance
304 | );
305 |
306 | // Decide if we need to change the approach_direction to the local frame of the end effector orientation
307 | if( grasp.pre_grasp_approach.direction.header.frame_id == ee_parent_link )
308 | {
309 | // Apply/compute the approach_direction vector in the local frame of the grasp_pose orientation
310 | pre_grasp_approach_direction_local = grasp_pose_eigen.rotation() * pre_grasp_approach_direction;
311 | }
312 | else
313 | {
314 | pre_grasp_approach_direction_local = pre_grasp_approach_direction; //grasp_pose_eigen.rotation() * pre_grasp_approach_direction;
315 | }
316 |
317 | // Update the grasp matrix usign the new locally-framed approach_direction
318 | pre_grasp_pose_eigen.translation() += pre_grasp_approach_direction_local;
319 |
320 | // Convert eigen pre-grasp position back to regular message
321 | tf::poseEigenToMsg(pre_grasp_pose_eigen, pre_grasp_pose.pose);
322 |
323 | // Copy original header to new grasp
324 | pre_grasp_pose.header = grasp_pose.header;
325 |
326 | return pre_grasp_pose;
327 | }
328 |
329 |
330 |
331 | } // namespace
332 |
--------------------------------------------------------------------------------
/include/moveit_simple_grasps/moveit_blocks.h:
--------------------------------------------------------------------------------
1 | /*********************************************************************
2 | * Software License Agreement (BSD License)
3 | *
4 | * Copyright (c) 2014, CU Boulder
5 | * All rights reserved.
6 | *
7 | * Redistribution and use in source and binary forms, with or without
8 | * modification, are permitted provided that the following conditions
9 | * are met:
10 | *
11 | * * Redistributions of source code must retain the above copyright
12 | * notice, this list of conditions and the following disclaimer.
13 | * * Redistributions in binary form must reproduce the above
14 | * copyright notice, this list of conditions and the following
15 | * disclaimer in the documentation and/or other materials provided
16 | * with the distribution.
17 | * * Neither the name of CU Boulder nor the names of its
18 | * contributors may be used to endorse or promote products derived
19 | * from this software without specific prior written permission.
20 | *
21 | * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
22 | * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
23 | * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
24 | * FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
25 | * COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
26 | * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
27 | * BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
28 | * LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
29 | * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
30 | * LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
31 | * ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
32 | * POSSIBILITY OF SUCH DAMAGE.
33 | *********************************************************************/
34 |
35 | /**
36 | * \brief Simple pick place for blocks
37 | * \author Dave Coleman
38 | */
39 |
40 | // ROS
41 | #include
42 |
43 | // MoveIt!
44 | #include
45 |
46 | // Grasp generation
47 | #include
48 | #include
49 | #include // simple tool for showing graspsp
50 |
51 | namespace moveit_simple_grasps
52 | {
53 |
54 | static const double BLOCK_SIZE = 0.04;
55 |
56 | struct MetaBlock
57 | {
58 | std::string name;
59 | geometry_msgs::Pose start_pose;
60 | geometry_msgs::Pose goal_pose;
61 | };
62 |
63 | class MoveItBlocks
64 | {
65 | public:
66 |
67 | // grasp generator
68 | moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
69 |
70 | moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
71 |
72 | // data for generating grasps
73 | moveit_simple_grasps::GraspData grasp_data_;
74 |
75 | // our interface with MoveIt
76 | boost::scoped_ptr move_group_;
77 |
78 | // which arm are we using
79 | std::string ee_group_name_;
80 | std::string planning_group_name_;
81 |
82 |
83 | ros::NodeHandle nh_;
84 |
85 | // settings
86 | bool auto_reset_;
87 | int auto_reset_sec_;
88 | int pick_place_count_; // tracks how many pick_places have run
89 |
90 | MoveItBlocks()
91 | : auto_reset_(false),
92 | auto_reset_sec_(4),
93 | pick_place_count_(0),
94 | nh_("~")
95 | {
96 | ROS_INFO_STREAM_NAMED("moveit_blocks","Starting MoveIt Blocks");
97 |
98 | // Get arm info from param server
99 | nh_.param("ee_group_name", ee_group_name_, std::string("unknown"));
100 | nh_.param("planning_group_name", planning_group_name_, std::string("unknown"));
101 |
102 | ROS_INFO_STREAM_NAMED("moveit_blocks","End Effector: " << ee_group_name_);
103 | ROS_INFO_STREAM_NAMED("moveit_blocks","Planning Group: " << planning_group_name_);
104 |
105 | // Create MoveGroup for one of the planning groups
106 | move_group_.reset(new move_group_interface::MoveGroup(planning_group_name_));
107 | move_group_->setPlanningTime(30.0);
108 |
109 | // Load grasp generator
110 | if (!grasp_data_.loadRobotGraspData(nh_, ee_group_name_))
111 | ros::shutdown();
112 |
113 | // Load the Robot Viz Tools for publishing to rviz
114 | visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools( grasp_data_.base_link_));
115 | visual_tools_->setFloorToBaseHeight(-0.9);
116 | visual_tools_->loadEEMarker(grasp_data_.ee_group_, planning_group_name_);
117 |
118 | simple_grasps_.reset(new moveit_simple_grasps::SimpleGrasps(visual_tools_));
119 |
120 | // Let everything load
121 | ros::Duration(1.0).sleep();
122 |
123 | // Do it.
124 | startRoutine();
125 | }
126 |
127 | bool startRoutine()
128 | {
129 | // Debug - calculate and output table surface dimensions
130 | /*
131 | if( false )
132 | {
133 | double y_min, y_max, x_min, x_max;
134 | getTableWidthRange(y_min, y_max);
135 | getTableDepthRange(x_min, x_max);
136 | ROS_INFO_STREAM_NAMED("table","Blocks width range: " << y_min << " <= y <= " << y_max);
137 | ROS_INFO_STREAM_NAMED("table","Blocks depth range: " << x_min << " <= x <= " << x_max);
138 | }
139 | */
140 |
141 | // Create start block positions (hard coded)
142 | std::vector blocks;
143 | double block_y = 0.1;
144 | double block_x = 0.35;
145 | // Flip the side of the table the blocks are on depending on which arm we are using
146 | //if( arm_.compare("right") == 0 )
147 | // block_y *= -1;
148 | blocks.push_back( createStartBlock(block_x, block_y, "Block1") );
149 | blocks.push_back( createStartBlock(block_x+0.1, block_y, "Block2") );
150 | blocks.push_back( createStartBlock(block_x+0.2, block_y, "Block3") );
151 |
152 | // The goal for each block is simply translating them on the y axis
153 | for (std::size_t i = 0; i < blocks.size(); ++i)
154 | {
155 | blocks[i].goal_pose = blocks[i].start_pose;
156 | blocks[i].goal_pose.position.y += 0.2;
157 | }
158 |
159 | // Show grasp visualizations or not
160 | visual_tools_->setMuted(false);
161 |
162 | // Create the walls and tables
163 | //createEnvironment(visual_tools_);
164 |
165 | // --------------------------------------------------------------------------------------------------------
166 | // Repeat pick and place forever
167 | while(ros::ok())
168 | {
169 | // --------------------------------------------------------------------------------------------
170 | // Re-add all blocks
171 | for (std::size_t i = 0; i < blocks.size(); ++i)
172 | {
173 | resetBlock(blocks[i]);
174 | }
175 |
176 | // Place on left side, then back on right side
177 | for (std::size_t side = 0; side < 2; ++side)
178 | {
179 |
180 | // Do for all blocks
181 | for (std::size_t block_id = 0; block_id < blocks.size(); ++block_id)
182 | {
183 | // Pick -------------------------------------------------------------------------------------
184 | while(ros::ok())
185 | {
186 | ROS_INFO_STREAM_NAMED("pick_place","Picking '" << blocks[block_id].name << "'");
187 |
188 | // Visualize the block we are about to pick
189 | visual_tools_->publishCuboid(blocks[block_id].start_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
190 |
191 | if( !pick(blocks[block_id].start_pose, blocks[block_id].name) )
192 | {
193 | ROS_ERROR_STREAM_NAMED("pick_place","Pick failed.");
194 |
195 | // Ask user if we should try again
196 | if( !promptUser() )
197 | exit(0);
198 |
199 | // Retry
200 | resetBlock(blocks[block_id]);
201 | }
202 | else
203 | {
204 | ROS_INFO_STREAM_NAMED("pick_place","Done with pick ---------------------------");
205 | break;
206 | }
207 | }
208 |
209 | // Place -------------------------------------------------------------------------------------
210 | while(ros::ok())
211 | {
212 | ROS_INFO_STREAM_NAMED("pick_place","Placing '" << blocks[block_id].name << "'");
213 |
214 | // Publish goal block location
215 | visual_tools_->publishCuboid(blocks[block_id].goal_pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
216 |
217 | if( !place(blocks[block_id].goal_pose, blocks[block_id].name) )
218 | {
219 | ROS_ERROR_STREAM_NAMED("pick_place","Place failed.");
220 |
221 | // Determine if the attached collision body as already been removed, in which case
222 | // we can ignore the failure and just resume picking
223 | /*
224 | if( !move_group_->hasAttachedObject(blocks[block_id].name) )
225 | {
226 | ROS_WARN_STREAM_NAMED("pick_place","Collision object already detached, so auto resuming pick place.");
227 |
228 | // Ask user if we should try again
229 | if( !promptUser() )
230 | break; // resume picking
231 | }
232 | */
233 |
234 | // Ask user if we should try again
235 | if( !promptUser() )
236 | exit(0);
237 | }
238 | else
239 | {
240 | ROS_INFO_STREAM_NAMED("pick_place","Done with place ----------------------------");
241 | break;
242 | }
243 | } // place retry loop
244 |
245 | // Swap this block's start and end pose so that we can then move them back to position
246 | geometry_msgs::Pose temp = blocks[block_id].start_pose;
247 | blocks[block_id].start_pose = blocks[block_id].goal_pose;
248 | blocks[block_id].goal_pose = temp;
249 |
250 | pick_place_count_++;
251 |
252 | } // loop through 3 blocks
253 |
254 | ROS_INFO_STREAM_NAMED("pick_place","Finished picking and placing " << blocks.size()
255 | << " blocks. Total pick_places: " << pick_place_count_);
256 |
257 | } // place on both sides of table
258 |
259 | // Ask user if we should repeat
260 | //if( !promptUser() )
261 | // break;
262 | ros::Duration(1.0).sleep();
263 |
264 | }
265 |
266 | // Everything worked!
267 | return true;
268 | }
269 |
270 | void resetBlock(MetaBlock block)
271 | {
272 | // Remove attached object
273 | visual_tools_->cleanupACO(block.name);
274 |
275 | // Remove collision object
276 | visual_tools_->cleanupCO(block.name);
277 |
278 | // Add the collision block
279 | visual_tools_->publishCollisionBlock(block.start_pose, block.name, BLOCK_SIZE);
280 | }
281 |
282 | MetaBlock createStartBlock(double x, double y, const std::string name)
283 | {
284 | MetaBlock start_block;
285 | start_block.name = name;
286 |
287 | // Position
288 | start_block.start_pose.position.x = x;
289 | start_block.start_pose.position.y = y;
290 | start_block.start_pose.position.z = BLOCK_SIZE / 2.0; //getTableHeight(-0.9);
291 |
292 | // Orientation
293 | double angle = 0; // M_PI / 1.5;
294 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
295 | start_block.start_pose.orientation.x = quat.x();
296 | start_block.start_pose.orientation.y = quat.y();
297 | start_block.start_pose.orientation.z = quat.z();
298 | start_block.start_pose.orientation.w = quat.w();
299 |
300 | return start_block;
301 | }
302 |
303 | bool pick(const geometry_msgs::Pose& block_pose, std::string block_name)
304 | {
305 | std::vector possible_grasps;
306 |
307 | // Pick grasp
308 | simple_grasps_->generateBlockGrasps( block_pose, grasp_data_, possible_grasps );
309 |
310 | // Visualize them
311 | //visual_tools_->publishAnimatedGrasps(possible_grasps, grasp_data_.ee_parent_link_);
312 | visual_tools_->publishGrasps(possible_grasps, grasp_data_.ee_parent_link_);
313 |
314 | // Prevent collision with table
315 | //move_group_->setSupportSurfaceName(SUPPORT_SURFACE3_NAME);
316 |
317 | // Allow blocks to be touched by end effector
318 | {
319 | // an optional list of obstacles that we have semantic information about and that can be touched/pushed/moved in the course of grasping
320 | std::vector allowed_touch_objects;
321 | allowed_touch_objects.push_back("Block1");
322 | allowed_touch_objects.push_back("Block2");
323 | allowed_touch_objects.push_back("Block3");
324 | allowed_touch_objects.push_back("Block4");
325 |
326 | // Add this list to all grasps
327 | for (std::size_t i = 0; i < possible_grasps.size(); ++i)
328 | {
329 | possible_grasps[i].allowed_touch_objects = allowed_touch_objects;
330 | }
331 | }
332 |
333 | //ROS_INFO_STREAM_NAMED("","Grasp 0\n" << possible_grasps[0]);
334 |
335 | return move_group_->pick(block_name, possible_grasps);
336 | }
337 |
338 | bool place(const geometry_msgs::Pose& goal_block_pose, std::string block_name)
339 | {
340 | ROS_WARN_STREAM_NAMED("place","Placing '"<< block_name << "'");
341 |
342 | std::vector place_locations;
343 |
344 | // Re-usable datastruct
345 | geometry_msgs::PoseStamped pose_stamped;
346 | pose_stamped.header.frame_id = grasp_data_.base_link_;
347 | pose_stamped.header.stamp = ros::Time::now();
348 |
349 | // Create 360 degrees of place location rotated around a center
350 | for (double angle = 0; angle < 2*M_PI; angle += M_PI/2)
351 | {
352 | pose_stamped.pose = goal_block_pose;
353 |
354 | // Orientation
355 | Eigen::Quaterniond quat(Eigen::AngleAxis(double(angle), Eigen::Vector3d::UnitZ()));
356 | pose_stamped.pose.orientation.x = quat.x();
357 | pose_stamped.pose.orientation.y = quat.y();
358 | pose_stamped.pose.orientation.z = quat.z();
359 | pose_stamped.pose.orientation.w = quat.w();
360 |
361 | // Create new place location
362 | moveit_msgs::PlaceLocation place_loc;
363 |
364 | place_loc.place_pose = pose_stamped;
365 |
366 | visual_tools_->publishCuboid(place_loc.place_pose.pose, BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, rviz_visual_tools::BLUE);
367 |
368 | // Approach
369 | moveit_msgs::GripperTranslation pre_place_approach;
370 | pre_place_approach.direction.header.stamp = ros::Time::now();
371 | pre_place_approach.desired_distance = grasp_data_.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
372 | pre_place_approach.min_distance = grasp_data_.approach_retreat_min_dist_; // half of the desired? Untested.
373 | pre_place_approach.direction.header.frame_id = grasp_data_.base_link_;
374 | pre_place_approach.direction.vector.x = 0;
375 | pre_place_approach.direction.vector.y = 0;
376 | pre_place_approach.direction.vector.z = -1; // Approach direction (negative z axis) // TODO: document this assumption
377 | place_loc.pre_place_approach = pre_place_approach;
378 |
379 | // Retreat
380 | moveit_msgs::GripperTranslation post_place_retreat;
381 | post_place_retreat.direction.header.stamp = ros::Time::now();
382 | post_place_retreat.desired_distance = grasp_data_.approach_retreat_desired_dist_; // The distance the origin of a robot link needs to travel
383 | post_place_retreat.min_distance = grasp_data_.approach_retreat_min_dist_; // half of the desired? Untested.
384 | post_place_retreat.direction.header.frame_id = grasp_data_.base_link_;
385 | post_place_retreat.direction.vector.x = 0;
386 | post_place_retreat.direction.vector.y = 0;
387 | post_place_retreat.direction.vector.z = 1; // Retreat direction (pos z axis)
388 | place_loc.post_place_retreat = post_place_retreat;
389 |
390 | // Post place posture - use same as pre-grasp posture (the OPEN command)
391 | place_loc.post_place_posture = grasp_data_.pre_grasp_posture_;
392 |
393 | place_locations.push_back(place_loc);
394 | }
395 |
396 | // Prevent collision with table
397 | //move_group_->setSupportSurfaceName(SUPPORT_SURFACE3_NAME);
398 |
399 | move_group_->setPlannerId("RRTConnectkConfigDefault");
400 |
401 | return move_group_->place(block_name, place_locations);
402 | }
403 |
404 | bool promptUser()
405 | {
406 | // Make sure ROS is still with us
407 | if( !ros::ok() )
408 | return false;
409 |
410 | if( auto_reset_ )
411 | {
412 | ROS_INFO_STREAM_NAMED("pick_place","Auto-retrying in " << auto_reset_sec_ << " seconds");
413 | ros::Duration(auto_reset_sec_).sleep();
414 | }
415 | else
416 | {
417 | ROS_INFO_STREAM_NAMED("pick_place","Retry? (y/n)");
418 | char input; // used for prompting yes/no
419 | std::cin >> input;
420 | if( input == 'n' )
421 | return false;
422 | }
423 | return true;
424 | }
425 |
426 | };
427 |
428 | } //namespace
429 |
--------------------------------------------------------------------------------
/launch/simple_grasps.rviz:
--------------------------------------------------------------------------------
1 | Panels:
2 | - Class: rviz/Displays
3 | Help Height: 78
4 | Name: Displays
5 | Property Tree Widget:
6 | Expanded:
7 | - /Global Options1
8 | - /Status1
9 | - /Marker1
10 | - /MotionPlanning1/Planned Path1
11 | Splitter Ratio: 0.5
12 | Tree Height: 738
13 | - Class: rviz/Selection
14 | Name: Selection
15 | - Class: rviz/Tool Properties
16 | Expanded:
17 | - /2D Pose Estimate1
18 | - /2D Nav Goal1
19 | - /Publish Point1
20 | Name: Tool Properties
21 | Splitter Ratio: 0.588679
22 | - Class: rviz/Views
23 | Expanded:
24 | - /Current View1
25 | Name: Views
26 | Splitter Ratio: 0.5
27 | - Class: rviz/Time
28 | Experimental: false
29 | Name: Time
30 | SyncMode: 0
31 | SyncSource: ""
32 | Visualization Manager:
33 | Class: ""
34 | Displays:
35 | - Alpha: 0.5
36 | Cell Size: 1
37 | Class: rviz/Grid
38 | Color: 160; 160; 164
39 | Enabled: true
40 | Line Style:
41 | Line Width: 0.03
42 | Value: Lines
43 | Name: Grid
44 | Normal Cell Count: 0
45 | Offset:
46 | X: 0
47 | Y: 0
48 | Z: 0
49 | Plane: XY
50 | Plane Cell Count: 10
51 | Reference Frame:
52 | Value: true
53 | - Class: rviz/Marker
54 | Enabled: true
55 | Marker Topic: /rviz_visual_tools
56 | Name: Marker
57 | Namespaces:
58 | Text: true
59 | end_effector: true
60 | Queue Size: 100
61 | Value: true
62 | - Class: moveit_rviz_plugin/MotionPlanning
63 | Enabled: false
64 | Move Group Namespace: ""
65 | MoveIt_Goal_Tolerance: 0
66 | MoveIt_Planning_Attempts: 10
67 | MoveIt_Planning_Time: 5
68 | MoveIt_Use_Constraint_Aware_IK: true
69 | MoveIt_Warehouse_Host: 127.0.0.1
70 | MoveIt_Warehouse_Port: 33829
71 | Name: MotionPlanning
72 | Planned Path:
73 | Links:
74 | All Links Enabled: true
75 | Expand Joint Details: false
76 | Expand Link Details: false
77 | Expand Tree: false
78 | Link Tree Style: Links in Alphabetic Order
79 | base:
80 | Alpha: 1
81 | Show Axes: false
82 | Show Trail: false
83 | collision_head_link_1:
84 | Alpha: 1
85 | Show Axes: false
86 | Show Trail: false
87 | Value: true
88 | collision_head_link_2:
89 | Alpha: 1
90 | Show Axes: false
91 | Show Trail: false
92 | Value: true
93 | display:
94 | Alpha: 1
95 | Show Axes: false
96 | Show Trail: false
97 | Value: true
98 | dummyhead1:
99 | Alpha: 1
100 | Show Axes: false
101 | Show Trail: false
102 | head:
103 | Alpha: 1
104 | Show Axes: false
105 | Show Trail: false
106 | Value: true
107 | head_camera:
108 | Alpha: 1
109 | Show Axes: false
110 | Show Trail: false
111 | left_arm_itb:
112 | Alpha: 1
113 | Show Axes: false
114 | Show Trail: false
115 | left_arm_mount:
116 | Alpha: 1
117 | Show Axes: false
118 | Show Trail: false
119 | left_gripper:
120 | Alpha: 1
121 | Show Axes: false
122 | Show Trail: false
123 | Value: true
124 | left_gripper_base:
125 | Alpha: 1
126 | Show Axes: false
127 | Show Trail: false
128 | Value: true
129 | left_gripper_l_finger:
130 | Alpha: 1
131 | Show Axes: false
132 | Show Trail: false
133 | Value: true
134 | left_gripper_r_finger:
135 | Alpha: 1
136 | Show Axes: false
137 | Show Trail: false
138 | Value: true
139 | left_hand:
140 | Alpha: 1
141 | Show Axes: false
142 | Show Trail: false
143 | Value: true
144 | left_hand_accelerometer:
145 | Alpha: 1
146 | Show Axes: false
147 | Show Trail: false
148 | Value: true
149 | left_hand_camera:
150 | Alpha: 1
151 | Show Axes: false
152 | Show Trail: false
153 | Value: true
154 | left_hand_camera_axis:
155 | Alpha: 1
156 | Show Axes: false
157 | Show Trail: false
158 | left_hand_range:
159 | Alpha: 1
160 | Show Axes: false
161 | Show Trail: false
162 | Value: true
163 | left_lower_elbow:
164 | Alpha: 1
165 | Show Axes: false
166 | Show Trail: false
167 | Value: true
168 | left_lower_forearm:
169 | Alpha: 1
170 | Show Axes: false
171 | Show Trail: false
172 | Value: true
173 | left_lower_shoulder:
174 | Alpha: 1
175 | Show Axes: false
176 | Show Trail: false
177 | Value: true
178 | left_torso_itb:
179 | Alpha: 1
180 | Show Axes: false
181 | Show Trail: false
182 | left_upper_elbow:
183 | Alpha: 1
184 | Show Axes: false
185 | Show Trail: false
186 | Value: true
187 | left_upper_elbow_visual:
188 | Alpha: 1
189 | Show Axes: false
190 | Show Trail: false
191 | Value: true
192 | left_upper_forearm:
193 | Alpha: 1
194 | Show Axes: false
195 | Show Trail: false
196 | Value: true
197 | left_upper_forearm_visual:
198 | Alpha: 1
199 | Show Axes: false
200 | Show Trail: false
201 | Value: true
202 | left_upper_shoulder:
203 | Alpha: 1
204 | Show Axes: false
205 | Show Trail: false
206 | Value: true
207 | left_wrist:
208 | Alpha: 1
209 | Show Axes: false
210 | Show Trail: false
211 | Value: true
212 | pedestal:
213 | Alpha: 1
214 | Show Axes: false
215 | Show Trail: false
216 | Value: true
217 | right_arm_itb:
218 | Alpha: 1
219 | Show Axes: false
220 | Show Trail: false
221 | right_arm_mount:
222 | Alpha: 1
223 | Show Axes: false
224 | Show Trail: false
225 | right_gripper:
226 | Alpha: 1
227 | Show Axes: false
228 | Show Trail: false
229 | Value: true
230 | right_gripper_base:
231 | Alpha: 1
232 | Show Axes: false
233 | Show Trail: false
234 | Value: true
235 | right_gripper_l_finger:
236 | Alpha: 1
237 | Show Axes: false
238 | Show Trail: false
239 | Value: true
240 | right_gripper_r_finger:
241 | Alpha: 1
242 | Show Axes: false
243 | Show Trail: false
244 | Value: true
245 | right_hand:
246 | Alpha: 1
247 | Show Axes: false
248 | Show Trail: false
249 | Value: true
250 | right_hand_accelerometer:
251 | Alpha: 1
252 | Show Axes: false
253 | Show Trail: false
254 | Value: true
255 | right_hand_camera:
256 | Alpha: 1
257 | Show Axes: false
258 | Show Trail: false
259 | Value: true
260 | right_hand_camera_axis:
261 | Alpha: 1
262 | Show Axes: false
263 | Show Trail: false
264 | right_hand_range:
265 | Alpha: 1
266 | Show Axes: false
267 | Show Trail: false
268 | Value: true
269 | right_lower_elbow:
270 | Alpha: 1
271 | Show Axes: false
272 | Show Trail: false
273 | Value: true
274 | right_lower_forearm:
275 | Alpha: 1
276 | Show Axes: false
277 | Show Trail: false
278 | Value: true
279 | right_lower_shoulder:
280 | Alpha: 1
281 | Show Axes: false
282 | Show Trail: false
283 | Value: true
284 | right_torso_itb:
285 | Alpha: 1
286 | Show Axes: false
287 | Show Trail: false
288 | right_upper_elbow:
289 | Alpha: 1
290 | Show Axes: false
291 | Show Trail: false
292 | Value: true
293 | right_upper_elbow_visual:
294 | Alpha: 1
295 | Show Axes: false
296 | Show Trail: false
297 | Value: true
298 | right_upper_forearm:
299 | Alpha: 1
300 | Show Axes: false
301 | Show Trail: false
302 | Value: true
303 | right_upper_forearm_visual:
304 | Alpha: 1
305 | Show Axes: false
306 | Show Trail: false
307 | Value: true
308 | right_upper_shoulder:
309 | Alpha: 1
310 | Show Axes: false
311 | Show Trail: false
312 | Value: true
313 | right_wrist:
314 | Alpha: 1
315 | Show Axes: false
316 | Show Trail: false
317 | Value: true
318 | screen:
319 | Alpha: 1
320 | Show Axes: false
321 | Show Trail: false
322 | Value: true
323 | sonar_ring:
324 | Alpha: 1
325 | Show Axes: false
326 | Show Trail: false
327 | Value: true
328 | torso:
329 | Alpha: 1
330 | Show Axes: false
331 | Show Trail: false
332 | Value: true
333 | Loop Animation: false
334 | Robot Alpha: 0.5
335 | Show Robot Collision: false
336 | Show Robot Visual: true
337 | Show Trail: false
338 | State Display Time: REALTIME
339 | Trajectory Topic: /move_group/display_planned_path
340 | Planning Metrics:
341 | Payload: 1
342 | Show Joint Torques: false
343 | Show Manipulability: false
344 | Show Manipulability Index: false
345 | Show Weight Limit: false
346 | TextHeight: 0.08
347 | Planning Request:
348 | Colliding Link Color: 255; 0; 0
349 | Goal State Alpha: 1
350 | Goal State Color: 250; 128; 0
351 | Interactive Marker Size: 0
352 | Joint Violation Color: 255; 0; 255
353 | Planning Group: both_arms
354 | Query Goal State: false
355 | Query Start State: false
356 | Show Workspace: false
357 | Start State Alpha: 1
358 | Start State Color: 0; 255; 0
359 | Planning Scene Topic: planning_scene
360 | Robot Description: robot_description
361 | Scene Geometry:
362 | Scene Alpha: 0.9
363 | Scene Color: 50; 230; 50
364 | Scene Display Time: 0.2
365 | Show Scene Geometry: false
366 | Voxel Coloring: Z-Axis
367 | Voxel Rendering: Occupied Voxels
368 | Scene Robot:
369 | Attached Body Color: 150; 50; 150
370 | Links:
371 | All Links Enabled: true
372 | Expand Joint Details: false
373 | Expand Link Details: false
374 | Expand Tree: false
375 | Link Tree Style: Links in Alphabetic Order
376 | base:
377 | Alpha: 1
378 | Show Axes: false
379 | Show Trail: false
380 | collision_head_link_1:
381 | Alpha: 1
382 | Show Axes: false
383 | Show Trail: false
384 | Value: true
385 | collision_head_link_2:
386 | Alpha: 1
387 | Show Axes: false
388 | Show Trail: false
389 | Value: true
390 | display:
391 | Alpha: 1
392 | Show Axes: false
393 | Show Trail: false
394 | Value: true
395 | dummyhead1:
396 | Alpha: 1
397 | Show Axes: false
398 | Show Trail: false
399 | head:
400 | Alpha: 1
401 | Show Axes: false
402 | Show Trail: false
403 | Value: true
404 | head_camera:
405 | Alpha: 1
406 | Show Axes: false
407 | Show Trail: false
408 | left_arm_itb:
409 | Alpha: 1
410 | Show Axes: false
411 | Show Trail: false
412 | left_arm_mount:
413 | Alpha: 1
414 | Show Axes: false
415 | Show Trail: false
416 | left_gripper:
417 | Alpha: 1
418 | Show Axes: false
419 | Show Trail: false
420 | Value: true
421 | left_gripper_base:
422 | Alpha: 1
423 | Show Axes: false
424 | Show Trail: false
425 | Value: true
426 | left_gripper_l_finger:
427 | Alpha: 1
428 | Show Axes: false
429 | Show Trail: false
430 | Value: true
431 | left_gripper_r_finger:
432 | Alpha: 1
433 | Show Axes: false
434 | Show Trail: false
435 | Value: true
436 | left_hand:
437 | Alpha: 1
438 | Show Axes: false
439 | Show Trail: false
440 | Value: true
441 | left_hand_accelerometer:
442 | Alpha: 1
443 | Show Axes: false
444 | Show Trail: false
445 | Value: true
446 | left_hand_camera:
447 | Alpha: 1
448 | Show Axes: false
449 | Show Trail: false
450 | Value: true
451 | left_hand_camera_axis:
452 | Alpha: 1
453 | Show Axes: false
454 | Show Trail: false
455 | left_hand_range:
456 | Alpha: 1
457 | Show Axes: false
458 | Show Trail: false
459 | Value: true
460 | left_lower_elbow:
461 | Alpha: 1
462 | Show Axes: false
463 | Show Trail: false
464 | Value: true
465 | left_lower_forearm:
466 | Alpha: 1
467 | Show Axes: false
468 | Show Trail: false
469 | Value: true
470 | left_lower_shoulder:
471 | Alpha: 1
472 | Show Axes: false
473 | Show Trail: false
474 | Value: true
475 | left_torso_itb:
476 | Alpha: 1
477 | Show Axes: false
478 | Show Trail: false
479 | left_upper_elbow:
480 | Alpha: 1
481 | Show Axes: false
482 | Show Trail: false
483 | Value: true
484 | left_upper_elbow_visual:
485 | Alpha: 1
486 | Show Axes: false
487 | Show Trail: false
488 | Value: true
489 | left_upper_forearm:
490 | Alpha: 1
491 | Show Axes: false
492 | Show Trail: false
493 | Value: true
494 | left_upper_forearm_visual:
495 | Alpha: 1
496 | Show Axes: false
497 | Show Trail: false
498 | Value: true
499 | left_upper_shoulder:
500 | Alpha: 1
501 | Show Axes: false
502 | Show Trail: false
503 | Value: true
504 | left_wrist:
505 | Alpha: 1
506 | Show Axes: false
507 | Show Trail: false
508 | Value: true
509 | pedestal:
510 | Alpha: 1
511 | Show Axes: false
512 | Show Trail: false
513 | Value: true
514 | right_arm_itb:
515 | Alpha: 1
516 | Show Axes: false
517 | Show Trail: false
518 | right_arm_mount:
519 | Alpha: 1
520 | Show Axes: false
521 | Show Trail: false
522 | right_gripper:
523 | Alpha: 1
524 | Show Axes: false
525 | Show Trail: false
526 | Value: true
527 | right_gripper_base:
528 | Alpha: 1
529 | Show Axes: false
530 | Show Trail: false
531 | Value: true
532 | right_gripper_l_finger:
533 | Alpha: 1
534 | Show Axes: false
535 | Show Trail: false
536 | Value: true
537 | right_gripper_r_finger:
538 | Alpha: 1
539 | Show Axes: false
540 | Show Trail: false
541 | Value: true
542 | right_hand:
543 | Alpha: 1
544 | Show Axes: false
545 | Show Trail: false
546 | Value: true
547 | right_hand_accelerometer:
548 | Alpha: 1
549 | Show Axes: false
550 | Show Trail: false
551 | Value: true
552 | right_hand_camera:
553 | Alpha: 1
554 | Show Axes: false
555 | Show Trail: false
556 | Value: true
557 | right_hand_camera_axis:
558 | Alpha: 1
559 | Show Axes: false
560 | Show Trail: false
561 | right_hand_range:
562 | Alpha: 1
563 | Show Axes: false
564 | Show Trail: false
565 | Value: true
566 | right_lower_elbow:
567 | Alpha: 1
568 | Show Axes: false
569 | Show Trail: false
570 | Value: true
571 | right_lower_forearm:
572 | Alpha: 1
573 | Show Axes: false
574 | Show Trail: false
575 | Value: true
576 | right_lower_shoulder:
577 | Alpha: 1
578 | Show Axes: false
579 | Show Trail: false
580 | Value: true
581 | right_torso_itb:
582 | Alpha: 1
583 | Show Axes: false
584 | Show Trail: false
585 | right_upper_elbow:
586 | Alpha: 1
587 | Show Axes: false
588 | Show Trail: false
589 | Value: true
590 | right_upper_elbow_visual:
591 | Alpha: 1
592 | Show Axes: false
593 | Show Trail: false
594 | Value: true
595 | right_upper_forearm:
596 | Alpha: 1
597 | Show Axes: false
598 | Show Trail: false
599 | Value: true
600 | right_upper_forearm_visual:
601 | Alpha: 1
602 | Show Axes: false
603 | Show Trail: false
604 | Value: true
605 | right_upper_shoulder:
606 | Alpha: 1
607 | Show Axes: false
608 | Show Trail: false
609 | Value: true
610 | right_wrist:
611 | Alpha: 1
612 | Show Axes: false
613 | Show Trail: false
614 | Value: true
615 | screen:
616 | Alpha: 1
617 | Show Axes: false
618 | Show Trail: false
619 | Value: true
620 | sonar_ring:
621 | Alpha: 1
622 | Show Axes: false
623 | Show Trail: false
624 | Value: true
625 | torso:
626 | Alpha: 1
627 | Show Axes: false
628 | Show Trail: false
629 | Value: true
630 | Robot Alpha: 0.5
631 | Show Robot Collision: false
632 | Show Robot Visual: true
633 | Value: false
634 | Enabled: true
635 | Global Options:
636 | Background Color: 48; 48; 48
637 | Fixed Frame: base
638 | Frame Rate: 30
639 | Name: root
640 | Tools:
641 | - Class: rviz/Interact
642 | Hide Inactive Objects: true
643 | - Class: rviz/MoveCamera
644 | - Class: rviz/Select
645 | - Class: rviz/FocusCamera
646 | - Class: rviz/Measure
647 | - Class: rviz/SetInitialPose
648 | Topic: /initialpose
649 | - Class: rviz/SetGoal
650 | Topic: /move_base_simple/goal
651 | - Class: rviz/PublishPoint
652 | Single click: true
653 | Topic: /clicked_point
654 | Value: true
655 | Views:
656 | Current:
657 | Class: rviz/Orbit
658 | Distance: 1.9896
659 | Enable Stereo Rendering:
660 | Stereo Eye Separation: 0.06
661 | Stereo Focal Distance: 1
662 | Swap Stereo Eyes: false
663 | Value: false
664 | Focal Point:
665 | X: 0.374866
666 | Y: -0.131657
667 | Z: 0.0590967
668 | Name: Current View
669 | Near Clip Distance: 0.01
670 | Pitch: 0.575398
671 | Target Frame:
672 | Value: Orbit (rviz)
673 | Yaw: 4.49857
674 | Saved: ~
675 | Window Geometry:
676 | Displays:
677 | collapsed: false
678 | Height: 1004
679 | Hide Left Dock: false
680 | Hide Right Dock: false
681 | Motion Planning:
682 | collapsed: false
683 | QMainWindow State: 000000ff00000000fd00000004000000000000010f0000038dfc0200000009fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000004100000371000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000001e004d006f00740069006f006e00200050006c0061006e006e0069006e006701000003b8000000160000001600000016000000010000010f000003f1fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730000000041000003f1000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000006380000003efc0100000002fb0000000800540069006d0065000000000000000638000002f600fffffffb0000000800540069006d006501000000000000045000000000000000000000066b0000038d00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
684 | Selection:
685 | collapsed: false
686 | Time:
687 | collapsed: false
688 | Tool Properties:
689 | collapsed: false
690 | Views:
691 | collapsed: false
692 | Width: 1920
693 | X: 1909
694 | Y: 17
695 |
--------------------------------------------------------------------------------