├── 1.1 车路协同
├── 1.云控平台
│ ├── V2X车路协同云控数据平台业务整理.md
│ ├── 云控平台解决方案
│ │ ├── 兆边科技-云平台数据结构.md
│ │ └── 商汤.md
│ ├── 从云边协同到云控平台的实现 .md
│ ├── 清华大学李克强:为什么我认为“云控基础平台”是智能网联汽车中具有国家属性的基础设施? .md
│ ├── 车联网云控基础平台趋势.md
│ ├── 车路云一体化融合控制系统.md
│ ├── 车路协同云控平台.md
│ ├── 车路协同云边缘云服务平台概要.md
│ ├── 车路协同服务云平台.md
│ └── 车路协同服务平台框架.md
├── 2.V2X
│ ├── 1. V2X
│ │ ├── V2X、OBU、RSU、V2V之间的协作关系.md
│ │ ├── V2X和车路协同研究:5G V2X将成为数字座舱标配.md
│ │ ├── V2X商业化落地路径分析.md
│ │ ├── V2X安全证书管理系统:智能网联 车路协同 泛在物联网.md
│ │ ├── V2X是什么.md
│ │ ├── V2X标准分析及测试方法探讨.md
│ │ ├── V2X的前生今世.md
│ │ ├── V2X车路协同技术.md
│ │ ├── 一文详解自动驾驶V2X车联网技术-曼孚科技.md
│ │ ├── 基于V2X车辆防碰撞预警算法开发和仿真.md
│ │ ├── 基于场景的V2X功能测试用例开发思考.md
│ │ └── 智能网联汽车(V2X)测试的实践与思考.md
│ ├── 2. C-V2X
│ │ ├── C-V2X仿真测试之虚拟场景设计.md
│ │ ├── C-V2X发展现状.md
│ │ ├── C-V2X技术发展、应用及展望.md
│ │ ├── C-V2X灵魂拷问:爆发、挑战、价值、盈利、竞合、引领.md
│ │ ├── C-V2X现场解析.md
│ │ ├── 如何实现C-V2X技术突破把住车联网发展命门.md
│ │ ├── 新基建,C-V2X技术分享.md
│ │ └── 蜂窝车联网(C-V2X)技术发展、应用及展望.md
│ ├── 3.ASN
│ │ ├── ASN .md
│ │ ├── ASN.1 Compiler for 3gpp.md
│ │ └── Java解析ASN.1结构.md
│ ├── C-V2X 与智能车路协同技术 的深度融合.md
│ ├── C-V2X 产业化路径和时间表研究 白皮书.md
│ ├── C-V2X.md
│ ├── C-V2X业务演进白皮书.md
│ ├── C-V2X国内现状分析.md
│ ├── C-V2X在国内车路协同的应用 .md
│ ├── C-V2X技术在智能网联行业中应用探讨.md
│ ├── C-V2X行业现状、产业化部署与演进路线.md
│ ├── C-V2X:LTE5G-V2X车联网服务与标准.md
│ ├── V2X与ITS的前世今生.md
│ ├── V2X车路协同云控数据平台业务整理.md
│ ├── 全国V2X建设思路.md
│ ├── 基于5G+C-V2X的车联网解决方案及验证.md
│ ├── 工信部公示8个V2X标准.md
│ ├── 腾讯V2X大动作.md
│ └── 车联网V2X通信认证体系.md
├── 3.2 CA证书
│ └── CA证书 linux 导入_V2X安全证书管理系统:智能网联 车路协同 泛在物联网.md
├── 3.网络:LTE
│ ├── LTE-V2X安全技术.md
│ ├── LTE-V2X笔记:一些基础知识.md
│ ├── LTE基本架构.md
│ ├── LTE流程.md
│ └── 车联网---V2X介绍、V2X现有的两大通信标准DSRC和LTE V2X.md
├── 5.2 团体标准
│ ├── 合作式智能运输系统 车用通信系统应用层及应用数据交互标准 第二阶段.md
│ ├── 合作式智能运输系统 车路协同云控系统 V2X 设备接入技术规范.md
│ ├── 合作式智能运输系统-车用通信系统应用层及应用数据交互标准 第一阶段 (copy).md
│ ├── 合作式智能运输系统-车用通信系统应用层及应用数据交互标准 第一阶段.md
│ ├── 基于LTE的车联网无线通信技术 消息层技术要求.md
│ ├── 基于LTE的车联网无线通信技术 直接通信系统技术要求.md
│ ├── 基于车路协同的通信证书管理技术规范.md
│ ├── 基于车路协同的高等级自动驾驶数据交互内容.md
│ ├── 智能网联汽车数据格式与定义.md
│ ├── 车路协同信息交互技术要求
│ │ ├── 应用层交互数据技术要求.md
│ │ ├── 车路协同系统 功能性能测试技术规程.md
│ │ └── 道路交通车路协同信息服务通用技术要求.md
│ ├── 车路协同系统应用层数据标准.md
│ └── 面向车路协同的通信证书管理技术规范.md
├── 5.3 车路协同标准进度汇报
│ ├── 1.《车路协同信息交互技术》系列标准 提案汇报.md
│ ├── 2021年CSAE标准数据.md
│ ├── 2021版团标体系系列解读 助力中国方案技术体系,构建智能网联汽车云控系统系列标准.md
│ ├── CAICV联盟基础软件工作组2021年度工作总结.md
│ ├── 《车路协同云控基础平台》系列标准 提案汇报.md
│ ├── 《车路协同信息交互技术要求》系列标准第2&3部分进展汇报.md
│ ├── 《车路协同路侧感知系统》系列标准汇报.md
│ ├── 车路协同信息交互技术要求 第 2 部分:路侧设施与中心子系统.md
│ └── 车路协同信息交互技术要求 第 3 部分:云控平台与第三方应用服务平台.md
├── 5.4 产业联盟标准
│ └── 智能交通 路侧智能感知 应用层数据格式.md
├── 6.2 智能设施
│ └── 未来之争 车路协同道路智能设施:我想静静.md
├── 6.参考建设方案
│ ├── 中国移动车联网 V2X 平台 白皮书.md
│ ├── 交通运输部关于山东省开展高速铁路建设管理模式等交通强国建设试点工作的意见 .md
│ ├── 山东案例:智慧高速与车路协同探索与实践 .md
│ ├── 广州市车联网先导区V2X云控基础平台技术规范.md
│ ├── 广州市车联网先导区建设总体技术规范.md
│ ├── 新中新车路协同智慧交通解决方案.md
│ ├── 智慧车路协同解决方案与应用.md
│ ├── 金水智能汽车5G-V2X车路协同安全测试认证基地项目招标文件.md
│ ├── 银川市智能网联汽车道路测试示范 应用项目(一期).md
│ └── 长沙:国内首个规模化落地V2X商用场景的城市.md
├── 9.1解决方案
│ ├── 万集科技.md
│ ├── 东方世纪.md
│ ├── 中国移动
│ │ ├── 中国移动车路协同V2X智慧交通解决方案 .md
│ │ └── 中国移动车路协同解决方案.md
│ ├── 京东云车路协同解决方案.md
│ ├── 亿维智能交通车路协同解决方案.md
│ ├── 兆边科技.md
│ ├── 光庭公司智能网联解决方案.md
│ ├── 北京米文动力科技有限公司.md
│ ├── 千寻位置-车路协同解决方案.md
│ ├── 华为
│ │ └── 华为车联网服务.md
│ ├── 华道兴车路协同云平台.md
│ ├── 多伦科技.md
│ ├── 希迪
│ │ ├── 希迪CIDI:“V2X+智慧高速”解决方案.md
│ │ └── 车路协同路侧全息感知解决方案.md
│ ├── 新境智能.md
│ ├── 无锡数据湖.md
│ ├── 星云互联
│ │ ├── C-DAS智能辅助驾驶.md
│ │ ├── V2X智能云端服务.md
│ │ ├── 产品中心.md
│ │ ├── 创新体系.md
│ │ ├── 基于RSU+的交通协同管控.md
│ │ ├── 开放的V2X可编程平台.md
│ │ ├── 标准推进丨星云互联牵头车路协同第二阶段应用层标准公开征求意见.md
│ │ └── 解决方案.md
│ ├── 海康
│ │ └── 海康智联.md
│ ├── 滴滴:面向未来的智慧交通云控平台.md
│ ├── 百度
│ │ ├── 清华大学&百度:面向自动驾驶的车路协同关键技术与展望.md
│ │ ├── 自动驾驶车路协同一体化解决方案.md
│ │ └── 面向自动驾驶的车路协同关键技术与展望.md
│ ├── 蘑菇车联:车路协同 or 智慧交通.md
│ ├── 阿里云交通云控平台.md
│ ├── 雅迅网络5G+C-V2X车路协同云控平台 .md
│ ├── 集萃感知.md
│ ├── 高新兴.md
│ ├── 高鸿股份
│ │ └── 高鸿股份-车路协同云控平台.md
│ └── 鼎讯股份-车路协同云控平台.md
├── 9.2应用解决方案
│ ├── 路侧系统
│ │ ├── 发力智能道路,打造城市智能路侧系统解决方案.md
│ │ ├── 车路协同路端系统的数据集NGSIM介绍 .md
│ │ └── 面向车路协同的智慧路侧系统设计.md
│ └── 车路协同系统下区域路径实时决策方法.md
├── 9.3车路协同报告、资料
│ ├── 2020 中国车路协同行业精品报告.md
│ ├── 2020中国车路协同行业报告.md
│ ├── 2020中国车路协同行业概览.md
│ ├── 2021中国车路协同产业科技创新TOP10.md
│ ├── “车路协同”是怎么帮助智能汽车的.md
│ ├── 什么是车路协同?优势有哪些?应用场景介绍.md
│ ├── 典型车路协同应用场景定义.md
│ ├── 协同之下,待破有题——探寻车路协同应用落地之路.md
│ ├── 四维图新郭磐石:符合国情的车路协同商业化关键问题探讨.md
│ ├── 基于车路协同技术畅想未来智慧交通.md
│ ├── 如何达成真正意义上的车路协同?.md
│ ├── 寻找刚性需求场景 车路协同技术PK传统交通技术.md
│ ├── 智慧城市&车路协同市场机会分析.md
│ ├── 智能网联汽车深度报告:车路协同,高阶自动驾驶新起点.md
│ ├── 智能车路协同系统浅析.md
│ ├── 智能道路及车路协同交通优化控制技术探讨.md
│ ├── 标准解读系列之五:一文读懂什么是协同自动驾驶? .md
│ ├── 浅析车路协同的发展现状及未来前景.md
│ ├── 浙江省厅交通数据中台,为“车路协同”提供后台支撑.md
│ ├── 清华大学&百度:面向自动驾驶的车路协同关键技术与展望.md
│ ├── 清华大学教授:构建车路云网的跨界融合.md
│ ├── 目前有哪些车企开始在做车路协同?.md
│ ├── 自动驾驶未来赛道“争夺战”:车路协同+数据引擎+云控平台.md
│ ├── 车路协同与5G、激光雷达、T-box关系网.md
│ ├── 车路协同专辑2022共享.md
│ ├── 车路协同全域感知与数据融合.md
│ ├── 车路协同典型应用.md
│ ├── 车路协同到底要协同什么?.md
│ ├── 车路协同十年路:初心与三个设想.md
│ ├── 车路协同发展的问题及思考 .md
│ ├── 车路协同发展阶段及路径.md
│ ├── 车路协同哪家强?落地能力是关键.md
│ ├── 车路协同应用场景分析 .md
│ ├── 车路协同技术发展态势分析报告.md
│ ├── 车路协同技术发展现状与展望.md
│ ├── 车路协同技术的演进与嬗变.md
│ ├── 车路协同服务平台框架.md
│ ├── 车路协同的云管边端架构及服务研究.md
│ ├── 车路协同的演变与发展.md
│ ├── 车路协同相关产业发展趋势.md
│ ├── 车路协同系统技术研究.md
│ ├── 车路协同若干痛点问题的思考 .md
│ ├── 车路协同规模应用的七大难题和解决策略.md
│ ├── 车路协同解决方案.md
│ ├── 车路协同赋予交通感知,数字技术让管理透明可视.md
│ ├── 长沙智能网联云控管理平台.md
│ ├── 面向智能网联汽车的车路协同综合管理平台.md
│ ├── 面向自动驾驶的车路协同关键技术与展望.md
│ └── 面向零拥堵的车路协同新型架构及产业生态重构.md
├── 9.4国内车路协同建设落地方案
│ ├── 南宁沙吴高速公路开展车路协同测试.md
│ ├── 山东开通首条智慧高速,最长里程实现车路协同.md
│ ├── 武汉经开区即将启动国内最大规模车路协同测试.md
│ └── 重庆石渝高速:300套车路协同路侧设备让通行更安全.md
├── ReadMe.md
└── 车路协同备忘录.md
├── 1.1.1 车路协同感知设备
├── 1.OBU
│ ├── OBU.md
│ ├── OBU发出.xmind
│ ├── OBU可返回的接口数据 .md
│ ├── OBU接收.xmind
│ └── T-BOX与OBU之间的秘密.md
├── 2.RSU
│ ├── 1. 团体标准
│ │ └── 合作式智能运输系统 RSU与中心子系统间接口规范.md
│ ├── 2. 白皮书
│ │ └── 中国联通智能路侧单元白皮书.md
│ ├── 5G智能网联路侧设备覆盖率提升探索.md
│ ├── RSU与云控系统接口规范.md
│ ├── 学习车联网V2X过程中_车联网路侧单元RSU .md
│ ├── 平台向RSU下发 .md
│ ├── 浪潮天鹰路侧计算单元.md
│ ├── 车联网基建下RSU规模部署以及商业模式、成本分析.md
│ └── 雄安新区-V2X硬件设备采购要求.md
├── 2021版团标体系系列解读-搭建智能感知标准子体系,助力融合感知与定位系统开发.md
├── 3. 摄像头
│ ├── 1. 团体标准
│ │ ├── 道路视频摄像机智能分析功能及分级要求.md
│ │ └── 道路视频摄像机智能分析功能测试规范.md
│ ├── 2. 摄像头相关算法
│ │ └── 视频监控中的多目标跟踪综述.md
│ ├── 3. 摄像头相关资料
│ │ ├── .keep
│ │ └── 头豹研究院-2019中国智能摄像头行业研究报告.md
│ ├── 4. 算法要求
│ │ ├── 交通事件检测算法要求.md
│ │ ├── 团雾检测.md
│ │ ├── 抛洒物检测算法要求.md
│ │ ├── 智能路口复合电警交通违法抓拍.md
│ │ ├── 能见度检测.md
│ │ ├── 视频分析服务器.md
│ │ ├── 货车异常行驶检测.md
│ │ ├── 车头AI特征.md
│ │ ├── 车头卡口基础特征.md
│ │ ├── 车辆统计.md
│ │ └── 逆行检测.md
│ ├── “云智一体”系列白皮书智能视频.md
│ ├── 全国高速公路视频云联网省级云平台方案.md
│ ├── 参考 智能+视频云技术解析及三大行业应用.md
│ ├── 感动科技-视频网联云控平台.md
│ ├── 智慧交通视频分析云平台建设方案.md
│ ├── 智慧交通视频监控系统.md
│ ├── 车路协同视频云平台建设方案V1.0.md
│ └── 面向视频领域的边缘计算白皮书.md
├── 4. 雷达
│ ├── 毫米波雷达
│ │ ├── 毫米波雷达在车路协同系统中的应用研究.md
│ │ └── 激光雷达数学模型和运动畸变去除.md
│ └── 激光雷达
│ │ ├── 激光雷达如何实现赋能车路协同?.md
│ │ ├── 激光雷达的工作原理.md
│ │ ├── 激光雷达:车路协同感知的纽带传感器.md
│ │ └── 自动驾驶车载激光雷达技术现状分析.md
├── 5.路侧计算单元
│ ├── .keep
│ └── 浪潮天鹰路侧计算单元.md
├── 6.路侧融合感知
│ ├── 2020年智慧道路之路侧智能感知行业研究报告.md
│ ├── 2021 路侧感知 研究产业报告.md
│ ├── L4级路侧需求、技术路线及痛点.md
│ ├── V2X全息路面感知解决方案.md
│ ├── 一种基于C‑V2X、雷达与视觉的智能路侧感知系统.md
│ ├── 一种基于深度学习的路侧视角超视距全域融合感知系统.md
│ ├── 一种基于车路数据融合的路侧组合感知设备在线标定方法.md
│ ├── 智慧道路中的路侧感知技术.md
│ ├── 智能网联路侧感知计算协同软件.md
│ ├── 谈谈车路协同的路侧精准感知技术.md
│ ├── 路侧感知研究:政策持续加码,百亿级路侧智能感知市场启动 .md
│ ├── 路侧感知研究:雷视一体,全息感知,巨头纷纷布局
│ ├── 路侧智慧交通控制 为数字交通新型融合基础设施网络提供强力支撑.md
│ ├── 车联网中基于英特尔架构的激光雷达3D点云处理与感知融合方案.md
│ ├── 车联网路侧感知系统发展现状及测试方法研究.md
│ └── 面向智能网联交叉口的多源交通感知及控制设备.md
├── 7.雷视融合
│ ├── 多传感器信息融合(标定, 数据融合, 任务融合).md
│ ├── 多传感器数据融合算法综述.md
│ ├── 多传感器融合.md
│ ├── 多传感器融合技术(基本概念、前融合和后融合的区别).md
│ ├── 多传感器融合算法,基于Lidar,Radar,Camera算法.md
│ ├── 多传感器融合算法,基于Radar,Camera和Lidar标定.md
│ ├── 多传感器融合算法,基于双目,长焦短焦,图像拼接,环视等.md
│ ├── 多传感器融合算法,雷视融合算法.md
│ ├── 宇磐科技.md
│ ├── 摄像头与毫米波雷达(Radar)融合.md
│ ├── 智慧高速雷视一体机.md
│ ├── 纳雷科技:取长补短:雷达视频融合为什么如此重要?.md
│ ├── 融合.md
│ └── 雷视融合一体机将成为路侧感知核心传感器.md
├── 交通感知企业大佬的年终总结与反思.md
├── 智慧道路中的路侧感知技术.md
├── 智能汽车感知相关产业深度研究:环境感知、车身感知、网联感知.md
├── 设备布设情况.md
├── 详解激光雷达与摄像头的自动驾驶感知路线之争.md
├── 车联网中的热点(路侧智能感知).md
├── 车路协同全域感知与数据融合.md
├── 面向超视距感知的感知通信一体化智能车联系统.md
└── 面向车路协同路侧设备运维管理平台研究.md
├── 1.2 边缘计算
├── 1. MEC
│ ├── MEC.md
│ ├── MEC与C-V2X融合应用场景.md
│ ├── MEC内部数据结构.md
│ ├── MEC硬件设备交互.md
│ ├── 中国联通5G+MEC技术研究与业务实践.md
│ ├── 基于5G MEC的车路协同开源平台实践和标准.md
│ ├── 移动边缘计算MEC学习笔记.md
│ ├── 路侧MEC软件架构说明.md
│ └── 车路协同边缘计算与边云协同.md
├── 1.2 边缘计算资料、报告
│ ├── 2021中国边缘计算产业研究报告.md
│ ├── 2021边缘计算产业图谱.md
│ ├── 5G下边缘云计算的车路协同实践.md
│ ├── AI边缘计算网关在车路协同中的应用.md
│ ├── Kubernetes如何支撑边缘计算平台.md
│ ├── 云原生边缘计算:探索与展望.md
│ ├── 云计算的可信新边界:边缘计算与协同未来.md
│ ├── 开源边缘计算平台研究分析.md
│ ├── 技术参考边缘计算平台、行业解决方案 .md
│ ├── 车联网容器应用探索:5G下边缘云计算的车路协同实践.md
│ ├── 车路协同边缘计算与边云协同.md
│ ├── 边缘智能——深度学习和边缘计算.md
│ ├── 边缘计算 — 与车联网.md
│ ├── 边缘计算、自动驾驶、V2X.md
│ ├── 边缘计算七大核心技术.md
│ ├── 边缘计算参考架构3.0.md
│ ├── 边缘计算在自动驾驶中的应用场景.md
│ ├── 边缘计算在车路协同中的场景应用分析.md
│ ├── 边缘计算汇总.md
│ ├── 边缘计算行业研究报告.md
│ ├── 边缘计算设备有哪些分类.md
│ ├── 边缘计算(一)边缘计算的兴起.md
│ ├── 边缘计算(三)边缘计算的解决方案.md
│ ├── 边缘计算(二)边缘计算的类型与用途.md
│ └── 邢国良:支持车路协同自动驾驶的实时边缘系统.md
├── 1.3边缘计算公司
│ ├── 雪湖科技.md
│ ├── 高鸿股份-硬件产品.md
│ └── 高鸿股份-软件产品.md
├── 1.4 标准规范
│ ├── 信息技术 云计算 边缘云计算通用技术要求.md
│ ├── 边缘网关设备技术与测试要求.md
│ └── 面向智慧灯杆应用的边缘计算智能网关一 般技术要求.md
├── 1.5 边缘计算网关
│ └── 华智有为:智能边缘计算网关规格书.md
├── 2. 方案、白皮书
│ ├── 5G+MEC+V2X车联网解决方案白皮书.md
│ ├── 5G下边缘云计算的车路协同实践.md
│ ├── MEC与C-V2X融合应用 场景白皮书.md
│ ├── 中兴通讯 MEC+X 全场景部署白皮书.md
│ ├── 边缘计算在车路协同中的场景应用分析.md
│ └── 边缘计算技术白皮书.md
├── 3. Baetyl
│ └── Baetyl推动边云融合 点亮智能物联网.md
├── 4. KubeEdge
│ ├── 1. KubeEdge简介.md
│ ├── 2. 使用Keadm进行部署.md
│ └── KubeEdge海量边缘节点管理架构实战.md
├── 5. EdgeGallery
│ └── EdgeGallery简介.md
├── 5G与MEC边缘计算.md
├── 中国移动边缘计算技术体系与实践.md
├── 云边协同关3篇政策与技术跟踪专题文章摘录.md
├── 云边计算系统架构、方案和工程实践.md
├── 十大边缘计算项目.md
├── 基于边缘计算平台的分析与研究.md
├── 移动边缘计算——MEC.md
├── 边缘计算 — 与车联网.md
├── 边缘计算.md
├── 边缘计算产业链详解.md
├── 边缘计算介绍以及几款边缘计算开源平台.md
├── 边缘计算发展现状与趋势展望.md
├── 边缘计算在自动驾驶中的应用场景.md
├── 边缘计算开源方案对比.md
├── 边缘计算技术创新与应用实践.md
└── 边缘计算综述: 应用、现状及挑战.md
├── 1.3 车联网
├── 2. 车联网参考资料、报告
│ ├── 2021年终盘点之挑战篇:车联网市场蓄势待发,机遇和挑战并存.md
│ ├── 2021年终盘点之机遇篇:车联网市场蓄势待发,机遇和挑战并存.md
│ ├── 2021年车联网政策年终大盘点.md
│ ├── 2022年中国车联网行业全景图谱.md
│ ├── BATH - 国内汽车操作系统布局.md
│ ├── CSDN-星焱-车联网项目.md
│ ├── HBase实践案例:车联网监控系统.md
│ ├── LTE-V2X车联网安全体系架构及安全运营管理.md
│ ├── 天津(西青)车联网先导区技术标准与实践白皮书.md
│ ├── 浅谈软件定义汽车(SDV).md
│ ├── 车联网 V2X 产业报告(2019-2020年).md
│ ├── 车联网技术笔记.md
│ ├── 车联网的体系架构.md
│ ├── 车联网相关知识点整理.md
│ ├── 车联网系统.md
│ └── 车联网系统如何架构?.md
├── 5G车联网
│ ├── 5G车联网业务演进趋势探索 .md
│ ├── 5G车联网技术与产业进展.md
│ └── 万字详解5G车联网技术.md
├── 什么是车联网?.md
├── 南京邮电大学-车联网简介.md
├── 感知 - 通信 - 计算融合的智能车联网的挑战与趋势.md
├── 智慧交通终极形态:车联网专题研究.md
├── 清华大学苏州汽车研究院.md
├── 谈谈车联网--V2X技术 .md
├── 车联网专题报告:V2X车联网,5G新基建领头雁.md
├── 车联网图片备忘录.md
├── 车联网的技术关键在哪里?.md
├── 车联网简介-董振江(南京邮电大学).md
├── 车联网路侧设施设置指南.md
└── 车辆大数据智能分析系统平台建设项目.md
├── 1.4 5G+车路协同
├── 5G C-V2X行业现状及展望:基于车路协同的自动驾驶.md
├── 5G与车路协同.md
├── 5G时代C-V2X的发展思考.md
├── 5G时代的车路协同(V2X),让未来交通更智慧.md
├── 5G车路协同在干线物流自动驾驶中的应用.md
├── 5G车路协同自动驾驶应用研究 .md
├── 一种5G车路协同自动驾驶解决方案.md
├── 人车路网云五维协同发展5G车联网 .md
├── 基于我国商密算法的车联网5G-V2X通信安全可信体系.md
└── 新基建、新动能5G车路协同白皮书.md
├── 1.5 ETC+车路协同
├── 1. 标准规范
│ ├── 基于 ETC 专用短程通信的车路协同 第 1 部分:应用集及应用数据交互需求.md
│ ├── 基于 ETC 专用短程通信的车路协同 第 2 部分:应用层数据交互格式.md
│ ├── 基于5.8G DSRC技术的车路协同---应用层数据交互格式.md
│ └── 基于ETC 的车路协同 ---应用层数据交互格式.md
├── 2. 参考建设方案
│ └── 基于ETC技术的车路协同方案.md
└── 3. 相关资料
│ ├── 基于ETC的河南高速公路智慧化建设与展望.md
│ ├── 基于高速公路ETC门架收费设施的车路协同系统探讨.md
│ └── 金溢科技刘咏平:ETC为基,5G为擎,车路协同静待花开.md
├── 1.6 仿真系统
├── 7大国内外自动驾驶仿真平台汇总.md
├── 国内外自动驾驶仿真软件总结.md
├── 车路协同环境下多车协同车速引导建模与仿真.md
├── 车路协同系统的视景仿真模型.md
└── 面向车路协同的路侧感知仿真系统.md
├── 1.7 冉斌教授-车路协同资料
├── 1 专利相关
│ └── 车路协同下道路交叉口信号控制优化方法.md
├── 东南大学冉斌:车路协同是自动驾驶的必由之路.md
├── 冉斌谈基于车路协同的自动驾驶.md
├── 冉斌:车路协同已经迎来朝霞满天
└── 冉斌:车路协同自动驾驶发展路线图的最新进展.md
├── 2.0 智慧网联
├── 智能网联先导区道路交叉口车路协同系统设计.md
├── 智能网联建设核心评价指标探讨.md
└── 清华大学-汽车工程系-智能网联汽车课题组.md
├── 2.1 智能网联车
├── 1.1 国家规范
│ ├── 国家车联网产业标准体系建设指南.md
│ ├── 智能网联汽车道路测试与示范应用管理规范(试行).md
│ └── 标准立项|《智能网联汽车云控系统系列标准》 .md
├── 1.2 团体标准
│ ├── 智能网联汽车场景数据图像标注要求与方法.md
│ ├── 智能网联汽车场景数据点云标注 要求及方法.md
│ ├── 智能网联汽车数据格式与定义.md
│ ├── 标准立项|《智能网联汽车 车控操作系统功能安全技术要求》 .md
│ └── 网联车辆平台间协同服务信息交互规范.md
├── 1.3 地方标准
│ ├── 江苏省智能网联汽车标准体系 建设指南.md
│ ├── 浙江智能网联汽车 道路基础地理数据规范.md
│ └── 车联网平台数据共享技术规范.md
├── 1.4 白皮书
│ └── 车联网无线场景评估——C-V2X工作组重磅白皮书.md
├── 2.1 智能网联汽车基础服务平台
│ ├── 【PPT全文】中国智能网联汽车基础数据服务平台发布 .md
│ ├── 中国智能网联汽车基础数据服务平台正式发布 .md
│ └── 李克强:智能网联汽车云控基础平台及其实现.md
├── 2.2 智能网联汽车参考资料
│ ├── 智能网联汽车——传感器与驾驶辅助.md
│ ├── 智能网联汽车——安全问题.md
│ ├── 智能网联汽车——底盘线控系统.md
│ ├── 智能网联汽车——智能化.md
│ ├── 智能网联汽车——未来发展趋势.md
│ ├── 智能网联汽车——概述.md
│ ├── 智能网联汽车——深度学习与无人驾驶(一).md
│ ├── 智能网联汽车——深度学习与无人驾驶(二).md
│ ├── 智能网联汽车——网联化.md
│ └── 智能网联汽车——车联网.md
├── 2.3 网联车算法相关参考资料
│ ├── .keep
│ ├── 【Apollo自动驾驶源码解读】车道线的感知和高精地图融合.md
│ └── 智能网联汽车边缘网络的分布式端-边协同算法.md
├── 2.4 知乎:JuIy智能网联车系列
│ ├── .keep
│ ├── 智能网联汽车(一)——概述.md
│ ├── 智能网联汽车(七)——传感器标定技术.md
│ ├── 智能网联汽车(三)——智能化.md
│ ├── 智能网联汽车(九)——深度学习与无人驾驶(一).md
│ ├── 智能网联汽车(二)——车载传感器与驾驶辅助.md
│ ├── 智能网联汽车(八)——环境感知之图像识别技术.md
│ ├── 智能网联汽车(六)——平台技术基础.md
│ ├── 智能网联汽车(十一)——汽车线控底盘.md
│ ├── 智能网联汽车(十三)——车联网.md
│ ├── 智能网联汽车(十二)——汽车总线技术.md
│ ├── 智能网联汽车(十五)——测试与评价.md
│ ├── 智能网联汽车(十六)——大数据技术.md
│ ├── 智能网联汽车(十四)——汽车安全设计.md
│ ├── 智能网联汽车(十)——深度学习与无人驾驶(二).md
│ └── 智能网联汽车(四)——网联化.md
├── 4. 信息安全
│ ├── 智能网联汽车信息安全白皮书.md
│ ├── 智能网联汽车信息安全解决方案.md
│ └── 智能网联汽车数字证书应用技术要求.md
├── 5G BRT智能网联车路协同解决方案.md
├── 5G与车联网的融合.md
├── 9. 参考资料
│ ├── 2021智能网联汽车专题报告.md
│ ├── 中国智能网联汽车基础数据服务平台正式发布.md
│ ├── 华为智能网联解决方案.md
│ ├── 实录 赵祥模《智能网联汽车测试评价关键技术及应用》.md
│ ├── 新能源汽车监控信息共享应用平台功能及应用探讨.md
│ ├── 智能网联汽车产业政策趋势分析及发展思考.md
│ ├── 智能网联汽车学习——思维导图.md
│ ├── 智能网联汽车封闭测试场建设内容简介.md
│ ├── 智能网联汽车深度报告:车路协同,高阶自动驾驶新起点.md
│ ├── 智能网联汽车边缘网络的分布式端-边协同算法 .md
│ ├── 智能网联汽车领域缩略语表.md
│ ├── 智能网联汽车(V2X)测试的实践与思考.md
│ ├── 深度解读 《智能网联汽车城市发展指南》(下).md
│ └── 深度解读《智能网联汽车城市发展指南》(上).md
├── 中国智能网联汽车技术平台.md
├── 中通服出品:车联网产业技术报告2021.md
├── 各地“十四五”规划促智能网联新发展 政策解读系列.md
├── 城市级智能网联示范区情况全扫描.md
├── 感知 - 通信 - 计算融合的智能车联网挑战与趋势.md
├── 新能源车联网平台产品 操作手册.md
├── 智能网联和智慧城市融合发展探索.md
├── 智能网联汽车-网联功能与应用(CFA).md
├── 智能网联汽车产业发展概述.md
├── 智能网联汽车产业链全景图.md
├── 智能网联汽车测试场设计技术要求.md
├── 智能网联汽车高精地图白皮书(2020).md
├── 智能网联车&车路协同&智能交通相关团标.md
├── 智能网联车路协同 城市大脑建设框架研究.md
├── 自动驾驶汽车关键技术感知.md
├── 车联网--5G+北斗精准定位赋能V2X安全辅助驾驶服务V5.md
├── 车联网各领域头部企业排行榜!.md
├── 车联网白皮书(网联自动驾驶分册).md
├── 车联网的三大商业模式.md
├── 车联网的体系架构是什么?.md
└── 软件定义、数据驱动下的智能网联汽车操作系统.md
├── 2.1.2 智能驾驶
├── 2021年汽车自动驾驶产业链深度研究报告.md
├── CSDN:FUXI_Willard-自动驾驶相关
│ ├── .keep
│ ├── 学习笔记1--自动驾驶环境感知概述.md
│ ├── 学习笔记2--车载传感器之摄像头和激光雷达.md
│ ├── 学习笔记3--车载传感器之毫米波雷达和超声波雷达.md
│ ├── 学习笔记4--惯性导航及总结.md
│ └── 学习笔记5--摄像头标定之内参标定.md
├── CSDN:筋斗云与自动驾驶
│ ├── .keep
│ ├── 自动驾驶之“芯” - 异构分布硬件架构.md
│ ├── 自动驾驶入门技术(10)—— 高精地图(HAD MAP).md
│ ├── 自动驾驶入门技术(1) —— 环境感知.md
│ ├── 自动驾驶入门技术(2) —— 车辆定位与高精地图.md
│ ├── 自动驾驶入门技术(3) —— 毫米波雷达.md
│ ├── 自动驾驶入门技术(4)—— 摄像头.md
│ ├── 自动驾驶入门技术(5)- 激光雷达.md
│ ├── 自动驾驶入门技术(6) —— 定位导航技术.md
│ ├── 自动驾驶入门技术(7)—— 多传感器信息融合(MSIF).md
│ ├── 自动驾驶入门技术(8)—— 自动驾驶仿真技术.md
│ └── 自动驾驶入门技术(9)—— 无人驾驶客户端系统.md
├── L4级路侧需求、技术路线及痛点.md
├── 中国联通 5G+远程智能驾驶白皮书.md
├── 中国高级驾驶辅助系统市场研究报告.md
├── 博客园:无人驾驶- Polaris8
│ ├── .keep
│ ├── 无人驾驶—动态环境感知与追踪.md
│ ├── 无人驾驶—定位系统.md
│ ├── 无人驾驶—感知基础.md
│ ├── 无人驾驶—感知实战:物体跟踪.md
│ ├── 无人驾驶—感知实战:目标检测.md
│ ├── 无人驾驶—自动驾驶概述.md
│ ├── 无人驾驶—路径规划.md
│ ├── 无人驾驶—预测系统.md
│ └── 无人驾驶—高精地图和V2X.md
├── 智能驾驶全产业链梳理.md
├── 智能驾驶功能软件平台设计规范 第一部分:系统架构.md
├── 智能驾驶功能软件平台设计规范 第二部分:感知融合功能服务接口.md
├── 未来自动驾驶必须解决哪些感知问题.md
├── 研究自动驾驶技术的算法需要哪些知识?.md
├── 自动驾驶之点云与图像融合综述.md
├── 自动驾驶未来赛道“争夺战”:车路协同+数据引擎+云控平台.md
├── 自动驾驶路侧感知定位技术条件.md
└── 自动驾驶车路协同绕不开5G+车联网.md
├── 2.2 智能座舱
└── 基于 H3 + RH850 的智能座舱功能安全设计.md
├── 2.3 自动驾驶
├── Apollo自动驾驶进阶课程
│ ├── Apollo自动驾驶进阶课(2)——Apollo开源模块.md
│ ├── Apollo自动驾驶进阶课(3)——高精度地图.md
│ ├── Apollo自动驾驶进阶课(4)——Apollo无人车定位技术.md
│ ├── Apollo自动驾驶进阶课(5)——Apollo感知技术.md
│ ├── Apollo自动驾驶进阶课(6)——Apollo规划技术.md
│ ├── Apollo自动驾驶进阶课(7)——Apollo控制技术.md
│ ├── Apollo自动驾驶进阶课(8)——Apollo ROS.md
│ └── Apollo进阶课程 ① 带你纵览无人车.md
└── whuzhang16
│ ├── AUTOSAR及自动驾驶的一些思考.md
│ ├── 初识自动驾驶系统.md
│ ├── 自动驾驶仿真测试的意义.md
│ ├── 自动驾驶定位概述.md
│ ├── 自动驾驶感知概述.md
│ └── 自动驾驶规划概述.md
├── 2.4 自动驾驶仿真
├── 现有的自动驾驶仿真软件现状总结.md
└── 知乎:孙工
│ ├── 自动驾驶虚拟仿真测试介绍(1):是什么.md
│ ├── 自动驾驶虚拟仿真测试介绍(2):为什么.md
│ ├── 自动驾驶虚拟仿真测试介绍(3):测什么.md
│ ├── 自动驾驶虚拟仿真测试介绍(4):用什么测.md
│ ├── 自动驾驶虚拟仿真测试介绍(5):怎么测.md
│ ├── 自动驾驶虚拟仿真测试介绍(6):谁来测.md
│ ├── 自动驾驶虚拟仿真测试介绍(8)虚拟仿真测试介绍:仿真测试的不同层次.md
│ ├── 虚拟仿真测试介绍(7):MIL、SIL、PIL和HIL是个啥.md
│ └── 虚拟仿真测试介绍(9):硬件在环(HIL)测试简介.md
├── 3.1 智慧城市
├── 3S 大数据和城市大脑赋能的智慧城市精细化管理.md
├── MapGIS智慧城市时空大数据云平台 .md
├── 亿信华辰的3D智慧城市大屏解决方案.md
├── 华为智慧城市之智能运行中心 (IOC).md
├── 吉安城市大脑.md
├── 城市大脑 领航智慧城市新未来.md
├── 城市大脑总体框架和主要平台.md
├── 城市大脑让智慧城市更智慧.md
├── 城市应急指挥平台方案.md
├── 基于GIS的智慧人口管理系统应用.md
├── 应急指挥中心
│ └── 应急指挥中心系统的研究与设计
├── 智慧城市交通的要素:路口监管可视化系统的解决方案.md
├── 智慧城市数字孪生IOC系统.md
├── 智慧城市运营中心建设方案.md
├── 沧州市智慧城市-城市大数据中心建设项目需求规格说明书
│ └── 2.项目概要.md
├── 烟台经开发布智慧城市项目.md
├── 烟台:为城市安全发展装上“智慧大脑”.md
├── 规范标准要求
│ └── 新型智慧城市评价指标(2016 年) .md
├── 讯飞 6300万 中标县域城市大脑项目.md
└── 雄安智能城市建设标准.md
├── 3.1.1 时空数据
└── 1. PB级时空数据毫秒级响应.md
├── 3.2 智慧高速
├── 1. 车路协同高速解决方案
│ ├── 基于C-V2X技术的智慧高速解决方案.md
│ ├── 基于V2X的高速公路车路协同应用研究.md
│ ├── 基于车路协同技术的智慧高速系统架构分析.md
│ ├── 智慧高速与车路协同发展思考.md
│ ├── 车联网大规模商用关键突破口深度调研车路协同智慧高速全国建设情况.md
│ ├── 车路协同下高速公路运行态势监测方法.md
│ ├── 车路协同在智慧高速领域的应用探索.md
│ ├── 车路协同技术在智慧高速建设中的应用展望.md
│ ├── 车路协同智慧高速建设方案.md
│ ├── 车路协同高速公路建设的思考与实践.md
│ ├── 高速公路车路协同创新示范情况全扫描.md
│ ├── 高速公路车路协同应用场景分析及研究.md
│ └── 高速公路车路协同雷达跟踪路况感知系统浅析.md
├── 2. 高速应用解决方案
│ ├── 应急指挥调度
│ │ ├── “互联网+”下的高速公路指挥调度系统.md
│ │ ├── 应急指挥.md
│ │ └── 应急管理大屏可视化决策系统.md
│ └── 智慧高速大屏可视化决策系统.md
├── 3. 参考解决方案
│ ├── 中国移动
│ │ └── 车路协同V2X智慧交通解决方案 .md
│ ├── 千寻位置-智慧高速解决方案.md
│ ├── 华为智慧交通(高速公路视频云联网)解决方案.md
│ ├── 山东高速公路运营管理中大数据应用探究.md
│ ├── 希迪智驾
│ │ ├── 希迪智驾发布“V2X+智慧高速”方案,打造智慧高速.md
│ │ └── 车路协同路侧全息感知解决方案.md
│ ├── 数字冰雹-智慧高速大屏可视化决策.md
│ ├── 新基建模式下智慧高速公路总体架构设计.md
│ ├── 智慧高速解决方案相关公司案例.md
│ ├── 杭绍甬智慧高速公路建设项目方案.md
│ ├── 浙江省智慧高速公路建设指南(暂行).md
│ ├── 深圳市城市交通规划设计研究中心:新基建背景下智慧高速的建设思考.md
│ ├── 百度-智慧高速解决方案.md
│ ├── 苏州第二十三届中国高速公路信息化大会.md
│ └── 阿里高速云控解决方案.md
├── 4.1 参考资料
│ ├── 专家谈智慧高速存在问题及“十四五”建设重点.md
│ ├── 华为云高速公路行业华为云高速公路行业.md
│ ├── 华为智慧高速的探索之路.md
│ ├── 实录 刘旭《智慧高速与车路协同发展思考》.md
│ ├── 实录 左志武《智慧高速与车路协同—山东高速的探索与实践》.md
│ ├── 数字时代的智慧高速公路全球趋势 .md
│ ├── 智慧高速云边协同解决方案.md
│ ├── 智慧高速公路建设指南(总体框架、应用建设要求).md
│ ├── 智慧高速公路技术体系构建.md
│ ├── 智慧高速如何破局实现车联网最先商用落地5G物联网络.md
│ ├── 智慧高速建设需要什么样的技术架构? .md
│ ├── 智慧高速车路协同现状与未来.md
│ ├── 浙江高速公路设备智能运管云平台应用探析.md
│ ├── 演讲实录 《高速公路工程建设和运营维护全生命周期数字化探索与应用》徐稳.md
│ ├── 演讲实录《南宁沙吴高速智慧高速设计研究与实践》黎琮莹.md
│ ├── 高速.md
│ ├── 高速公路智能车路协同系统整体架构与测评方法探讨 .md
│ └── 高速公路车路协同自动驾驶条件及技术研究(上).md
├── 4.2 地方建设参考资料
│ ├── 山东-智慧高速公路建设指南(试行)的通知.md
│ ├── 成都绕城高速:一双慧眼识坦途.md
│ └── 智慧高速与车路协同—山东高速的探索与实践.md
├── 5. 云控平台
│ ├── 云控平台与智慧高速.md
│ ├── 基于智能边缘计算的高速公路车路协同云控平台系统.md
│ └── 智慧高速云控平台总体技术要求.md
├── 6. 高速视频管理平台
│ ├── 高速公路视频分析系统及运营管理方案探究 .md
│ └── 高速公路视频联网省级云平台建设浅析 .md
├── 7. 两客一危
│ └── 高速公路两客一危车辆动态监管系统.md
├── 8. 标准规范要求
│ ├── 团体标准
│ │ ├── 智慧高速公路交通标志设置指南.md
│ │ ├── 智慧高速公路路侧设备共杆共享 技术要求.md
│ │ └── 高速公路支持路车协同可变信息标志布设指南.md
│ ├── 智慧高速公路信息化建设总体框架.md
│ ├── 智慧高速公路建设总体技术要求.md
│ ├── 智慧高速公路理论与实践总论
│ │ ├── 智慧高速公路理论与实践总论 第2章 智慧高速公路发展需求.md
│ │ └── 智慧高速公路理论与实践总论 第3章 智慧高速公路运营与服务智能化平台总体设计.md
│ ├── 智慧高速公路车路协同系统框架及要求第一部分.md
│ └── 智慧高速公路车路协同系统框架及要求第二部分.md
├── 两客一危-重点营运车辆
│ ├── “两客一危”动态监测和智能预警管理系统 .md
│ ├── 一张网 运营背景下高速公路 “ 两客一危” 动态监管系统.md
│ ├── 两客一危动态监测和智能预警管理系统.md
│ ├── 两客一危车辆主动安全智能防控解决方案.md
│ ├── 海康-两客一危综合管理解决方案.md
│ ├── 货车车辆智能监管解决方案 .md
│ └── 重点营运车辆信息化监管平台的建设研究 .md
├── 基于全生命周期管控的智慧高速建设探究 .md
├── 基于大数据AI的高速公路交通违法感知及干预.md
├── 基于大数据技术的高速公路预测预警处置平台 .md
├── 基于微服务架构的高速公路监控管理系统设计.md
├── 新基建下沿江高速公路扩建智能化建设探究.md
├── 智慧高速大屏可视化决策系统.md
├── 演讲实录《基于数字孪生的高速公路交通安全评估技术及应用》孟虎.md
├── 演讲实录《智慧高速解决方案汇报交流》郝若辰.md
├── 王刚:对智慧高速与车路协同的思考.md
├── 高速公路基础设施数字化管理平台 .md
└── 高速公路车路协同创新示范情况全扫描(2021版).md
├── 3.3 智慧公交
├── 1. 地方标准
│ └── 智能网联公交车路云一体化系统技术规范 第1部分:总体技术要求.md
├── 2. 各类参考资料
│ ├── 5G BRT智能网联车路协同系统.md
│ ├── 公交出行场景挖掘 .md
│ ├── 公交走廊集成化管控系统与车路协同应用.md
│ ├── 前沿热点 公交主动调控场景思考 .md
│ ├── 前沿热点 面向公交营运的车路协同关键技术研究.md
│ ├── 城市公交走廊出行特征分析.md
│ ├── 基于 5G 车路协同智慧公交解决方案.md
│ ├── 基于多源大数据的实时公共交通服务指数研究:以天津市为例.md
│ ├── 技术分享 基于乘客视角的市域公交一体化出行服务解决方案 .md
│ ├── 技术分享 基于规划决策平台的区域公交运行特征分析与应用 .md
│ ├── 智慧交通城市公交信息化解决方案.md
│ ├── 智能网联公交的三大发展趋势.md
│ ├── 深度解读V2X技术:智能公交如何实现车路云协同.md
│ ├── 电科智能助力自动驾驶智能网联公交走向未来.md
│ ├── 腾讯、希迪智驾:智能网联精准公交.md
│ ├── 长沙智慧公交.md
│ └── 长沙智慧公交315线首发 海信车路协同技术让智慧公交更准时.md
├── 3. 建设方案
│ ├── 5G+车路协同——智慧公交整体解决方案.md
│ ├── 参考 智慧公交解决方案.md
│ ├── 城市智能公交管理系统方案.md
│ ├── 湘江智能“车-站-路-云”一体化协同智慧公交解决方案.md
│ └── 面向公交营运管理的 车路协同应用场景研究.md
├── 4. 公交信号
│ └── 公交信号优先系统.md
├── 5. 解决方案
│ └── 百度-智慧公交解决方案.md
├── 基于车路协同的公交优先策略.md
└── 面向公交营运的车路协同关键技术研究 .md
├── 3.4 智慧交通
├── 2021年智慧交通十大热点.md
├── Apollo智能交通白皮书.md
├── ITTS智慧交通解决方案正式发布.md
├── “交通一张图”之困.md
├── 世纪高通位置大数据助力智慧交通.md
├── 交通AI算法
│ ├── 交通AI算法平台框架设计.md
│ └── 数据挖掘三大经典算法在交通领域的应用综述.md
├── 交通信息系统的整体架构.md
├── 交通大脑2.0解决方案.md
├── 交通数据可视化大屏端展示效果提升策略研究 .md
├── 交通研判平台
│ └── 腾讯:交通态势感知与研判分析平台.md
├── 人工智能AI在智能交通领域中的应用.md
├── 卓视智通-基于5G+AI的交通视频融合感知及数字孪生解决方案提供商.md
├── 吉安城市大脑-智慧交通软件平台.md
├── 国家规范
│ ├── 智能交通 数据安全服务.md
│ ├── 智能交通管理系统建设技术规范.md
│ ├── 道路交通信息服务——交通事件分类与编码.md
│ ├── 道路运输车辆主动安全智能防控系统 (平台技术规范).md
│ ├── 道路运输车辆主动安全智能防控系统 (平台通讯协议规范).md
│ ├── 道路运输车辆主动安全智能防控系统 (终端技术规范).md
│ └── 道路运输车辆主动安全智能防控系统 (终端通讯协议规范).md
├── 城市交通大数据
│ ├── 交通大数据服务平台建设方案.md
│ └── 城市交通大数据典型应用.md
├── 城市智慧交通系统总体解决方案.md
├── 城市智能交通指挥中心系统方案.md
├── 城市道路智能交通解决方案.md
├── 基于车路协同的智能交通系统体系框架
│ ├── 基于车路协同的智能交通系统体系框架-第3章 体系框架设计.md
│ ├── 基于车路协同的智能交通系统体系框架-绪论.md
│ └── 第4章 用户服务.md
├── 大数据、智慧城市与智慧交通.md
├── 大数据之路之交通大数据应用总体架构设计.md
├── 大数据时代新技术在智能交通中的应用.md
├── 应急管理大屏可视化决策系统.md
├── 招投标方案
│ └── 2.7亿,惠州智慧交通项目招标;建交通数字孪生、数据底座 .md
├── 数据资源
│ ├── 交通领域开源数据集详细汇总.md
│ └── 自动驾驶领域开源数据集详细汇总.md
├── 新基建背景下“大厂们”的交通战略(上) 侧记.md
├── 智慧交管大屏可视化决策系统.md
├── 智慧交通云平台建设解决方案.md
├── 智慧交通云视频平台建设
│ ├── 全国高速公路视频云联网省级云平台方案.md
│ ├── 智慧交通视频分析云平台建设方案.md
│ └── 智慧交通视频监控系统.md
├── 智慧交通产品解决方案-交通地理信息平台
│ └── 智慧交通产品解决方案-交通地理信息平台.md
├── 智慧交通信息服务平台产品解决方案.md
├── 智慧交通大数据云平台 建设方案.md
├── 智慧交通大数据及支撑平台
│ ├── 1.智慧交通大数据及支撑平台方案.md
│ ├── 10.——大数据支撑平台系统的性能设计要求.md
│ ├── 2.——大数据清洗系统.md
│ ├── 3.——大数据融合分析系统.md
│ ├── 4.——基于车辆识别的大数据套牌车分析.md
│ ├── 5.——尾气排放分析.md
│ ├── 6.——交通信息发布系统.md
│ ├── 7.——统一消息服务子系统.md
│ ├── 8.——三维GIS平台子系统.md
│ └── 9.——系统规划和平台建设.md
├── 智慧交通管理和服务平台系统集成解决方案.md
├── 智慧交通综合管理平台建设方案.md
├── 智慧交通解决方案.md
├── 智慧交通解决方案
│ ├── CiDi百公里智慧高速.md
│ ├── 中国通信建设-“城市智慧交通”项目交流资料.md
│ ├── 互联网+交通解决方案探讨.md
│ ├── 华为城市智能交通解决方案及案例.md
│ ├── 基于RFID技术的智能交通解决方案.md
│ ├── 大华公安交通综合管控解决方案.md
│ ├── 大华智能交通产品及方案简介.md
│ ├── 平安城市与智能交通系统解决方案.md
│ ├── 广州交通信息化建设成果汇报.md
│ ├── 延庆县智慧交通整体解决方案.md
│ ├── 昌吉市智慧交通系统.md
│ ├── 智慧交通产品和系统技术解决方案.md
│ ├── 智慧交通解决方案.md
│ ├── 智慧城市交通管理系统.md
│ ├── 智能交通技术、架构及方案总体概述.md
│ ├── 江苏智慧交通建设标准.md
│ ├── 江苏智慧高速建设标准 .md
│ ├── 浙江智慧高速解决方案 .md
│ ├── 海康威视智能交通方案.md
│ ├── 熊猫电子智慧交通解决方案.md
│ ├── 研华智能道路交通解决方案.md
│ ├── 神州数码城市智能交通解决方案.md
│ ├── 英特尔智慧交通解决方案.md
│ ├── 长沙县智慧交通系统.md
│ └── 高科通信智能交通行业背景及产品介绍.md
├── 智慧交通解决方案白皮书:趋势+交通智脑+应用(PPT) .md
├── 智慧交通运行监测平台(TOCC)建设方案.md
├── 智慧交通|沪宜公路智慧车列交通仿真研究.md
├── 智慧城市智能交通系统建议方案.md
├── 智能交通大数据及云应用平台解决方案
│ ├── 智慧交通大数据云平台建设综合解决方案.md
│ ├── 智慧交通大数据平台及应用.md
│ └── 智能交通大数据及云应用平台解决方案.md
├── 智能交通系列解决方案.md
├── 智能交通综合管控平台方案.md
├── 江苏交通综合运行监测系统设计与应用 .md
├── 烟台市可视化决策分析系统.md
├── 综合交通运行协调与指挥中心建设探究 .md
├── 腾讯未来交通白皮书2.0.md
├── 西安智慧交通平台.md
├── 路网发展
│ └── 从对外道路交通大数据分析看干线路网发展——以深圳为例 .md
└── 车路协同-智慧出行(智慧交通解决方案).md
├── 3.4.1 指标交通评价系统
├── GNN交通流量预测.md
├── 一场关于路口服务水平评价的辩论.md
├── 交通评价指标概略.md
├── 北京市:城市道路交通运行评价指标体系.md
├── 场景目标导向的交通信号控制效能评价指标体系.md
├── 城市道路交通运行评价体系简介 .md
├── 基于互联网大数据的交通拥堵短临预警模型研究.md
├── 基于低分辨率点检测器数据考虑溢出条件的基于周期的队列长度估计.md
├── 基于冲击波理论和概率混合的信号交叉口采样轨迹数据驱动的周期体积估计方法.md
├── 基于时空信息的交通流量预测方法汇总.md
├── 基于深度学习的交通拥堵检测.md
├── 基于稀疏轨迹数据的信号交叉口基于周期的排队长度估计.md
├── 基于车辆轨迹数据的信号交叉口实时排队长度估计.md
├── 浙江省:城市道路交通运行状态评价规范.md
├── 融合车牌识别数据和车辆轨迹数据的信号交叉口基于车道的排队长度估计.md
├── 道路交通拥堵度评价方法.md
├── 道路交通行为的离散空间建模与仿真方法研究.md
└── 高速路网交通运行状态评价与判断.md
├── 3.4.2 智慧路口
├── 1. 解决方案
│ ├── 上海黎明瑞达.md
│ ├── 东软:全息智慧路口.md
│ ├── 华为:全息路口解决方案.md
│ └── 基于端边云技术架构的智慧路口解决方案.md
├── 2. 各类博文资料
│ ├── 为城市交管赋能 滴滴发布信控系统基础版.md
│ ├── 再谈智慧路口城市交通管理技术路线之争.md
│ ├── 基于车内信号灯技术的智慧路口.md
│ ├── 数据评估是如何辅助信控优化决策的?.md
│ ├── 智慧交通发展下的路口多维度指标体系研究.md
│ ├── 智慧城市交通的要素:路口监管可视化系统的解决方案.md
│ ├── 智慧路口争夺战,看中控信息如何突围?.md
│ ├── 智能网联先导区道路交叉口车路协同系统设计.md
│ ├── 某高校智慧全息路口案例.md
│ ├── 用车路协同技术提高交叉路口通行效率的探究.md
│ └── 面向未来的智慧道路解决方案与实践.md
├── 3. 信号控制系统
│ ├── 三种常见的信号控制系统简介.md
│ ├── 城市道路交通信号控制方式适用规范.md
│ ├── 基于车联网的信号灯协同控制.md
│ ├── 多维数据赋能交通信号控制.md
│ ├── 滴滴信号控制白皮书.md
│ ├── 百度-智能信号控制.md
│ ├── 自适应信号控制系统.md
│ └── 车路协同下的“绿波”控制.md
├── 4. 全息路口
│ ├── 全息路口解决方案.md
│ └── 智慧全息路口以及数字孪生.md
├── 5. 智慧路口
│ └── 基于计算机视觉的交通路口智能监控系统
└── 路口截屏图片.md
├── 3.4.3 智慧隧道
├── 全息感知监测、路网衔接诱导……多条隧道智慧化建设实践.md
├── 如何做好智慧隧道的交通预案?.md
├── 数字孪生隧道 推动基础设施安全风险管控.md
├── 数字孪生隧道视频地址记录.md
├── 新基建下,智慧交通发展新规划:智慧隧道监控可视化系统.md
└── 智慧隧道车路协同平台——来自某智慧高速案例.md
├── 3.6 智慧公路
├── 1.1 参考资料报告
│ ├── 智慧交通道路全资产普查与管理平台建设方案.md
│ ├── 智慧公路建设方案.md
│ └── 演讲实录 《数据驱动的智慧公路协同运行保障技术及应用》陈艳艳.md
├── 2021年多省市智慧公路建设指南汇总.md
├── 公路等级划分标准.md
├── 公路项目建设可视化进度管理.md
├── 华为:路网数字化.md
├── 团体标准
│ └── 交通标志数字交互技术要求.md
├── 国家标准规范
│ ├── 公路交通气象预报格式.md
│ └── 公路工程适应自动驾驶附属设施总体技术规范.md
├── 地方标准规范
│ ├── 5G+智慧公路交通运营与安全白皮书.md
│ └── 德清县:智能网联道路基础设施建设规范.md
├── 基于BIM+GIS技术的公路工程可视化管理平台 .md
├── 建管养运
│ └── 公路建管养运一体化,各省亮剑(一).md
├── 智慧交通:智慧公路建设探索.md
├── 智慧公路顶层设计方案.md
├── 演讲实录《智慧公路关键技术研究与应用》张维苏 .md
└── 面向未来的智慧道路解决方案与实践.md
├── 3.7 路网管理
├── 1. 路网数字化
│ └── 佳都科技:路网平台.md
├── 基于大数据的城市道路网联交通安全态势分析.md
├── 路网新基建发展思考与展望 .md
└── 高速公路路网运行管理系统建设.md
├── 3.8 智慧社区
└── 智慧社区大屏可视化管理系统.md
├── 3.9 智慧停车
└── 城市级智慧停车:解决方案价值及商业模式的探索.md
├── 4.1 智慧书店
└── 智慧书店(数字化转型)解决方案 .md
├── 4.2 智慧校园
├── 宿州教体局发布2.6亿智慧学校项目(附6大建设内容).md
├── 新基建+智慧教育发展报告(2021) .md
└── 高校智慧校园大脑方案(汇报方案).md
├── 4.3 智慧园区
├── 基于AI技术的“一张图”的智慧园区数字孪生平台.md
├── 智慧园区3D可视化决方案.md
└── 科睿 x 智慧园区.md
├── 4.4 智慧政务
├── 基于GIS的国土空间规划平台建设 .md
├── 基于GIS的网格化系统综治中心(9+X)信息化 系统建设方案.md
└── 基于大数据技术的政务大脑.md
├── 4.6 智能运输物流
├── 千寻位置-智慧物流解决方案.md
└── 合作式智能运输系统 车用通信系统应用 层及应用数据交互标准.md
├── 4.7 智慧矿山
└── 智慧矿山5G自动驾驶.md
├── 4.8 智慧环卫
└── Web3D智慧环卫GIS系统.md
├── 4.9 智慧地铁
└── 物资全生命周期管理打造智慧地铁.md
├── 5.1 智慧旅游
└── 基于GIS的全域智慧旅游平台.md
├── 6.1 高精度地图
├── Apollo自动驾驶进阶课(3)——高精度地图.md
├── 参考资料、报告
│ ├── 一文详解高精地图:自动驾驶的必由之路-曼孚科技.md
│ ├── 主机厂L4高精地图研发之路.md
│ ├── 国内外14家高精地图企业对比.md
│ ├── 百度地图:一体化制图为智能交通“加马力”.md
│ ├── 车路协同与高精度地图.md
│ ├── 面向无人驾驶的边缘高精地图服务.md
│ ├── 高深智图刘澍泉:如何利用高精度地图打造数字交通底层基础?.md
│ ├── 高精动态地图基础平台参考架构和技术路线.md
│ ├── 高精地图定位需求强劲,车路协同商业落地加快.md
│ ├── 高精地图(一),自动驾驶的“天眼” .md
│ ├── 高精地图(二),自动驾驶的“天眼”.md
│ ├── 高精地图:激光雷达点云与高精地图融合.md
│ └── 高精度地图在车路协同系统中的统一化应用探索.md
├── 团体标准
│ └── 自动驾驶地图采集要素模型与交换格式.md
├── 国家规范
│ ├── 智能汽车电子地图数据模型与交换格式-第1部分 高速公路.md
│ └── 智能驾驶电子地图数据模型与交换格式第 2 部分:普通道路.md
├── 基于高精度地图的车路协同智能交通系统.md
├── 智能网联汽车高精地图白皮书(2020).md
├── 高德地图
│ └── 基于北斗卫星导航系统,高德车道级导航正式发布.md
└── 高精度地图README.md
├── 6.2 数字孪生
├── 八大案例,智达未来!51WORLD数字孪生技术全面助力交通行业智慧升级.md
├── 华为出品:数字孪生城市报告(全文) .md
├── 城市数字孪生:技术参考架构+关键技术+典型应用+标准体系(表).md
├── 基于三维GIS技术的公路交通数字孪生系统.md
├── 基于数字孪生的车路协同虚拟仿真平台研究.md
├── 如何快速搞懂数字孪生的本质? .md
├── 数字孪生交通应用介绍.md
├── 数字孪生建设方案
│ └── 数字孪生建设参考方案.md
├── 数字孪生技术在智慧城市建设中有哪些应用?.md
├── 数字孪生技术应用白皮书.md
├── 时空大数据链接数字孪生城市.md
├── 智慧交通中的数字孪生应用.md
├── 院士报告 数字孪生智慧城市概念与建设(PPT) .md
└── 院士讲坛 数字孪生智慧城市概念、建设要点探讨.md
├── 6.3 元宇宙
├── 元宇宙vs. 数字孪生:技术演化的视角.md
└── 元宇宙:从架构到落地(应用场景、产业链分析) .md
├── 6.4 北斗定位
└── 北斗系统在交通运输行业应用现状及展望PPT.md
├── 7.1 物联网
├── 2021物联网创新案例TOP50.md
├── EMQ
│ ├── EMQ X+TDengine 搭建 MQTT 物联网可视化平台.md
│ └── EMQ车路协同.md
├── MQTT
│ ├── MQTT QoS 设计:车联网平台消息传输质量保障.md
│ ├── 千万级车联网 MQTT 消息平台架构设计.md
│ ├── 车联网 TSP 平台场景中的 MQTT 主题设计.md
│ └── 车联网场景中的 MQTT 协议.md
├── Node-RED
│ ├── 0. CSDN 拿我格子衫来 Node-RED系列.md
│ ├── 1. Node-RED教程(一):Node-RED的介绍与安装.md
│ ├── 10. Node-RED教程(十):Node-RED面板dashboard节点的配置.md
│ ├── 11. Node-RED教程(十一):Node-RED面板chart节点的使用案例.md
│ ├── 12. Node-RED教程(十二):定制化节点教程.md
│ ├── 13. Node-RED教程(十三):三种方式安装启动Node-Red.md
│ ├── 14. Node-RED教程(十四):定制Node-REDUI.md
│ ├── 15. Node-RED教程(十五):工业仪表盘开发.md
│ ├── 16. Node-RED教程(十六):发布自定义Node-RED的npm包.md
│ ├── 17. Node-RED系列(十七):使用自定义UI节点网与flow交互.md
│ ├── 18. Node-RED系列(十八):配置静态目录,使用echarts.js,three.js,D3.js.md
│ ├── 19. Node-RED系列(十九):工业多图标面板制作.md
│ ├── 2. Node-RED教程(二):Node-RED的面板的操作.md
│ ├── 20. Node-RED系列(二十):一文让你彻底了解物联网平台Node-RED.md
│ ├── 21. Node-RED系列(二一):安装mqtt环境,简单使用案例,mqtt节点解析.md
│ ├── 3. Node-RED教程(三):Node-RED公共节点的使用.md
│ ├── 4. Node-RED教程(四):Node-RED函数节点的使用.md
│ ├── 5. Node-RED教程(五):Node-RED序列节点的使用.md
│ ├── 6. Node-RED教程(六):Node-RED解析节点的使用.md
│ ├── 7. Node-RED教程(七):Node-RED存储节点的使用.md
│ ├── 8. Node-RED教程(八):Node-RED网络节点的使用.md
│ └── 9. Node-RED教程(九):Node-RED面板dashboard节点的使用.md
├── ThingsBoard
│ ├── ThinsBoard相关资料.md
│ └── 系列
│ │ ├── 0. CSDN 那我格子衫来 ThingsBoard教程.md
│ │ ├── 1. ThingsBoard教程(一):ThingBoard介绍及安装.md
│ │ ├── 10. ThingsBoard教程(十):前端初级定制化.md
│ │ ├── 11. ThingsBoard教程(十一):部件库的入门知识.md
│ │ ├── 12. ThingsBoard教程(十二):部件库中使用echarts.md
│ │ ├── 13. ThingsBoard教程(十三):部件的基本API解释.md
│ │ ├── 14. ThingsBoard教程(十四):部件库基本JS函数API解释,及变量的使用,显示.md
│ │ ├── 15. ThingsBoard教程(十五):部件库的点击事件.md
│ │ ├── 16. ThingsBoard教程(十六):制作RPC部件.md
│ │ ├── 17. ThingsBoard教程(十七):自定义开发时间图表.md
│ │ ├── 2. ThingsBoard教程(二):租户,租户配置,部件组模块的使用.md
│ │ ├── 3. ThingsBoard教程(三):系统设置模块的使用.md
│ │ ├── 4. ThingsBoard教程(四):规则链简介与操作.md
│ │ ├── 5. ThingsBoard教程(五):客户,资产管理.md
│ │ ├── 6. ThingsBoard教程(六):设备管理.md
│ │ ├── 7. ThingsBoard教程(七):模拟设备遥测.md
│ │ ├── 8. ThingsBoard教程(八):自定义UI.md
│ │ └── 9. ThingsBoard教程(九):前端架构分析.md
├── XX城市物联网智慧交通建设项目可行性研究报告
│ ├── 13 附件.md
│ ├── 5 系统架构.md
│ ├── 6 平台软件设计.md
│ ├── 7 平台支撑系统功能.md
│ ├── 8 数据库设计.md
│ └── 9 平台接口.md
├── “一平台、两体系、三性特征、四个统一、五个超越、六类服务 ”一篇读懂数据治理、共享和应用.md
├── 国家规范
│ ├── 具有资源开放性的物联网能力要求.md
│ ├── 物联网 感知控制设备接入 第1部分总体要求.md
│ └── 物联网 感知控制设备接入 第2部分数据管理要求.md
├── 如何开发物联网应用?.md
├── 如何进行物联网大数据分析?.md
├── 开源物联网平台建设、参考解决方案.md
├── 当物联网遇上边缘计算.md
├── 拓维泛物联网平台.md
├── 物联网云平台发展研究报告2021.md
├── 物联网产业链梳理.md
├── 物联网大数据平台应具备的功能和特点.md
├── 物联网平台.md
├── 物联网建设,智慧城市道路智能交通解决方案.md
├── 物联网海量时序数据存储有哪些挑战?.md
├── 物联网的应用模式.md
├── 物联网的数据方案.md
└── 龙岩市物联网应用平台建设方案.md
├── 7.2 工业互联网
├── 工业互联网平台.md
└── 赛迪出品:工业互联网平台数字仿真报告2021 .md
├── 9.1 网络等级保护安全
└── 等保2.0网络安全等级保护解决方案 .md
├── 9.2 推荐系统
└── 信息流推荐系统智能交付解决方案探索.md
├── 9.3 5G应用
├── 31省“5G应用”主攻方向+责任单位一览! .md
├── 5G-智慧交通典型应用场景及解决方案.md
├── 5G应用优秀案例.md
└── 5G应用设计揭榜赛: 13个“领军”5G创新应用解决方案全解析!.md
├── 9.4 碳达峰、碳中和
├── .keep
├── 王小磊:城市公共交通的“双碳”与“碳交易”解读.md
└── 碳达峰、碳中和目标下交通领域碳排放计算展望.md
├── 9.5 双智
├── 北京“双智”实践 国家级经开区探索“车路行”智慧城市建设新思路.md
└── 首个“双智”协同蓝皮书发布 AIR智能道路系统助力交通建设高质量发展 .md
├── 9.6 其他产品
└── 茶饮连锁门店数字化转型该如何落地?.md
├── LICENSE
├── README.md
└── 自动化脚本.bat
/1.1 车路协同/1.云控平台/云控平台解决方案/商汤.md:
--------------------------------------------------------------------------------
1 | - [商汤绝影智能车路协同云控平台](https://www.sensetime.com/cn/product-detail?categoryId=32949)
2 |
3 | ## 平台介绍
4 |
5 | 商汤绝影智能车路协同云控平台,致力于打造“车路云一体化”的协同监管、分析决策平台。平台通过对运营车辆和路侧设备进行监测和管理,具备数 据接入、解析、存储、分析、分发等能力,并通过运营中心大屏进行实时展示和预警,为未来出行提供进一步平台级管理保障。
6 |
7 | 
8 |
9 |
10 |
11 | ## 平台架构
12 |
13 | 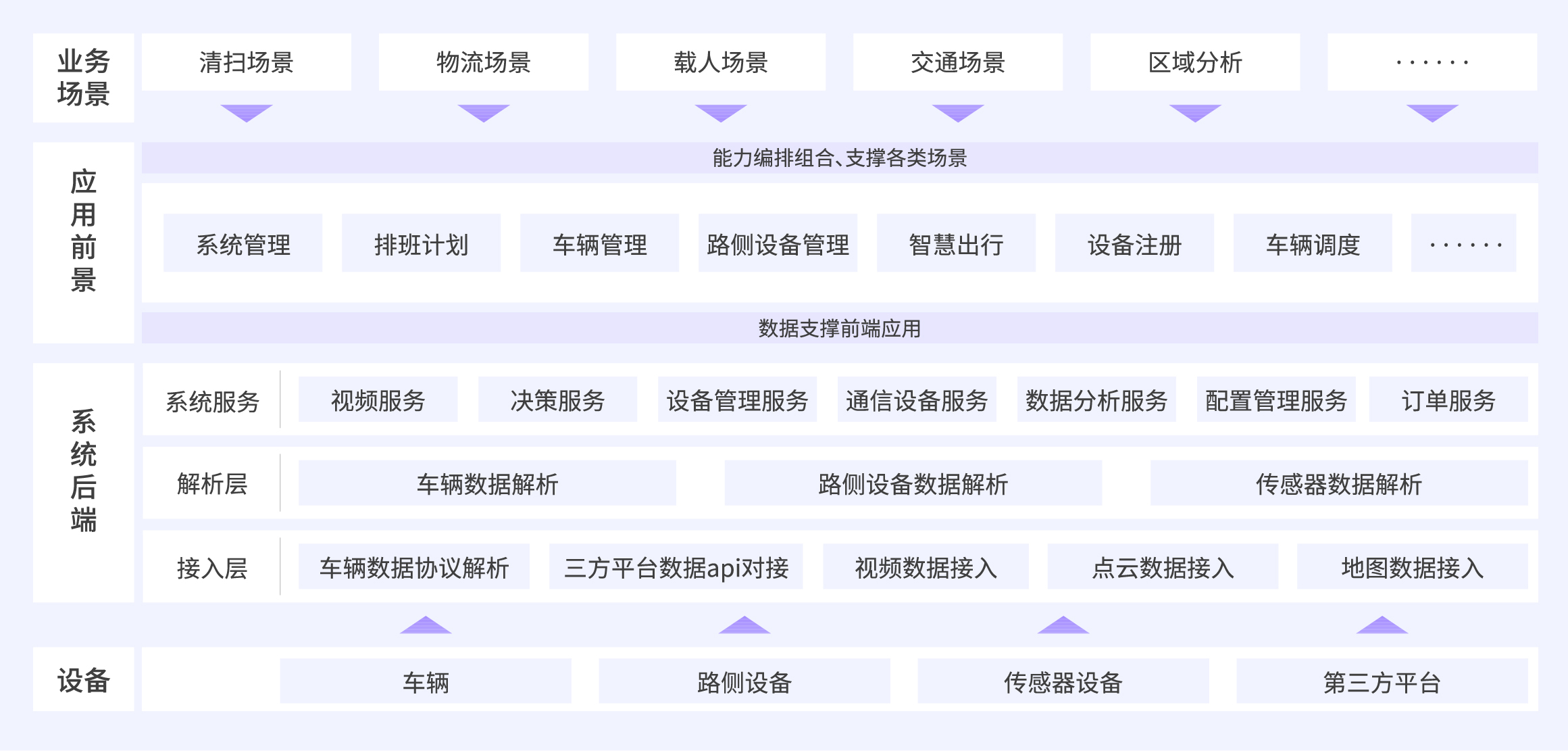
--------------------------------------------------------------------------------
/1.1 车路协同/1.云控平台/车联网云控基础平台趋势.md:
--------------------------------------------------------------------------------
1 | ## 云控基础平台趋势1:有效提升车联网安全性与推进智能驾驶能效
2 |
3 | 云控基础平台是车联网的核心环节,也是实现网联协同感知、网联协同决策与控制的关键基础技术。
4 |
5 | 云控基础平台由“中心云、区域云与边缘云”三级云组成,形成逻辑协同、物理分散的云计算中心;
6 |
7 | 通过云控基础平台赋能,将为道路车辆提供高精度、低时延、超视距增强安全感知的能力,有效提升智能网联汽车的安全性与行驶能效,推进中国车联网产业化落地。
8 |
9 | 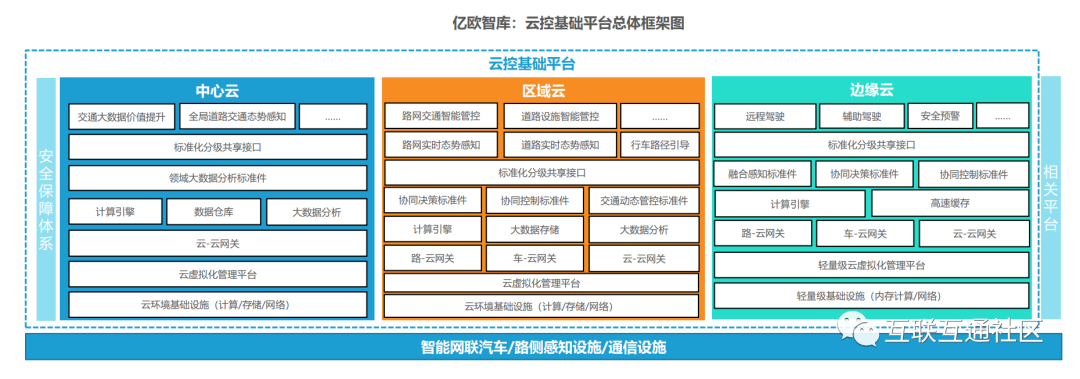
10 |
11 | ## 云控基础平台趋势2:打造车与平台数据互联互通的核心枢纽
12 |
13 | 车联网云控基础平台主要面向智能网联汽车“车路云一体”数字化设施建设,将是智慧交通的综合管理支撑平台,解决智能网联汽车 存在的信息孤岛,难以互联协同、有效管控的等问题,通过定义互相可靠的信息交互规则,实现车与车、车与基础设施、车与平台之 间数据的互联互通;
14 |
15 | 随着车联网商用运营推进落地,云控基础平台建设主体逐渐完善,将形成车企平台、政府平台和第三方运营平台的格局,通过对接入系统平台的车辆运行信息进行汇总监测,从而实现对接入平台进行管理、监测、调度等功能。
16 |
17 | 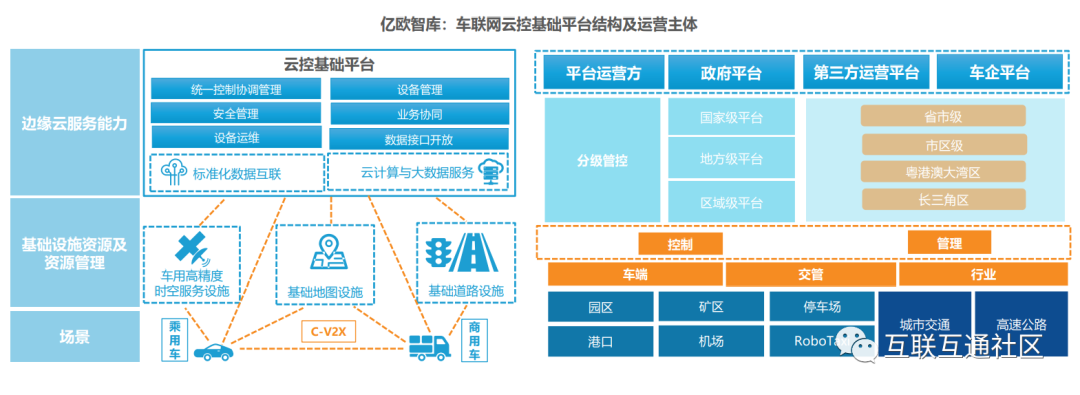
18 |
19 | ## 云控基础平台趋势3:有效推动特定场景无人驾驶商业化落地
20 |
21 | 云控基础平台是车联网的数据交流中心、智能交通管控核心,其发展经历三个主要阶段:早期TSP平台阶段,提供连接服务,目前已 发展至智能网联平台阶段,实现整车智能;未来将作为自动驾驶云控基础平台,真正实现车路协同;
22 |
23 | 未来,通过将各种实时的动态信息汇集到V2X云控基础平台,对多源数据的建模分析,为辅助驾驶和自动驾驶提供安全、可靠的规划 决策。提高驾驶的安全性和通行效率,同时提供个性化的内容服务。
24 |
25 | 
--------------------------------------------------------------------------------
/1.1 车路协同/2.V2X/1. V2X/V2X是什么.md:
--------------------------------------------------------------------------------
1 | V2X的整车协同方案看下图。
2 |
3 | 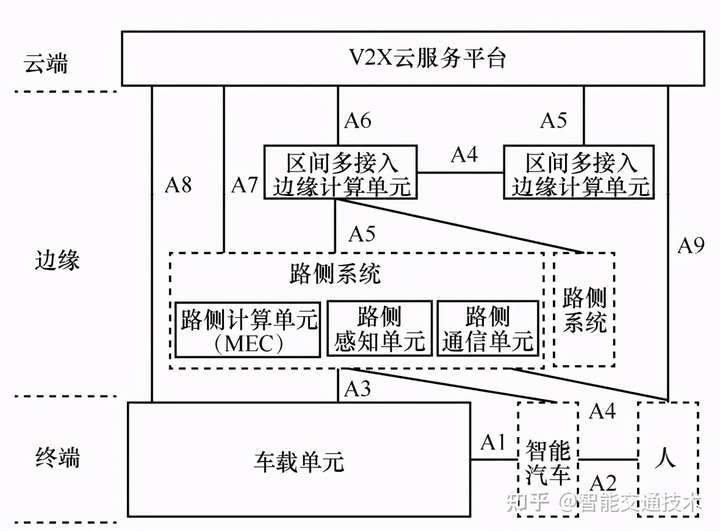
4 |
5 | V2X的整车协同方案
6 |
7 | 绕这么大圈,图中终于出现OBU了。V2X架构从逻辑上分为上下3层:**终端、边缘、云端**。
8 |
9 | 终端就是包括OBU、智能车和人;
10 |
11 | 边缘从逻辑上包括路侧通信单元 RSU(road side unit)、路测计算单元(MEC),路侧感知单元(雷达、摄像头、交通信号灯与指示牌等环境信息都是)。RSU负
12 |
13 | 责和OBU通信、负责和MEC通信等,相当于移动网络基站。MEC起着边缘大脑的作用,接收来自路测感知单元的信息、接收车载单元和其他MEC的信息,然后进
14 |
15 | 行分析、检测、跟踪、识别等一系列处理。
16 |
17 | 云端就是V2X云服务平台,实现大数据/AI算法智能分析、交通调度优化、高精度地图服务定位、车辆状态管理、车辆在线升级、信息服务等功能。
18 |
19 | OBU主要职责:完成 BSM 消息的上报、V2X消息的接收与解析、CAN 数据的读取与解析、消息的展示与提醒、保障信息安全。
20 |
21 |
--------------------------------------------------------------------------------
/1.1 车路协同/2.V2X/3.ASN/ASN.1 Compiler for 3gpp.md:
--------------------------------------------------------------------------------
1 | - [ASN.1 Compiler for 3gpp](https://blog.csdn.net/weixin_39920581/article/details/86692189)
2 |
3 | ASN.1,指抽象语法标记(Abstract Syntax Notation One),是一种 ISO/ITU-T 标准,描述了一种对数据进行表示、编码、传输和解码的数据格式。它提供了一整套正规的格式用于描述对象的结构,而不管语言上如何执行及这些数据的具体指代,也不用去管到底是什么样的应用程序[摘抄自百度百科,不是本文要说的重点]。
4 |
5 | 标准的ASN.1编码规则有基本编码规则(BER,Basic Encoding Rules)、唯一编码规则(DER,Distinguished Encoding Rules)、压缩编码规则(PER,Packed Encoding Rules)和XML编码规则(XER,XML Encoding Rules),本文就自己学习的PER/UPER编码做相关总结!
6 |
7 | PER (压缩编码规则) 分为:对齐方式(Aligned PER,APER)与非对齐方式(Unaligned PER,UPER)两种情况,两者的关键区别是,APER编码指在对一串数据进行编码时,要求对每一个数据格式的编码(完成以后)都要进行八位(8bit)对齐操作,即需要高位或者低位补0操作;UPER编码指在对一串数据进行编码时,只在全部数据编码结束后才进行八位(8bit)对齐操作。
8 |
9 | 针对UPER编码,根据ASN.1中的数据结构类型,可分类列出每种数据结构的UPER编码规则。
10 |
11 | UPER的编码原则是:用尽可能简单的规则得到最简洁的编码。
12 |
13 | 根绝X.680协议,ASN.1的数据类型主要有以下几种:
14 |
15 | 1)简单类型:a.BOOLEAN(布尔类型,只有真假两个值),b.NULL(空),c.INTEGER(整形,可表示任意长度的整数),d.ENUMERATED(枚举类型),e.BIT STRING(位串,代表以比特为单位的二进制字符串),f.OCTET STRING(八位串,代表以自己为单位的二进制字符串);
16 |
17 | 2)复合类性:g.CHIOCE(选择类型,可表示每次选择数据类型中的一个),h.SEQUENCE(序列,可表示一组不同数据类型的集合,=c中struct),I.SEQUENCE OF (可表示定义了同一数据类型元素的集合,=c中数组),j.SET(同SEQUENCE), k.SET OF (同SEQUENCE OF);
18 |
19 | 在最新的X.691协议中给出了以上每种类型的编码方式,本文是对对691协议中编码方式的整理及实例验证,并且着重对扩展标记“...”存在问题进行研究,因为针对最新的5G 3GPP协议中涉及到的ASN.1结构,相对4G有了一些扩展及改变,本文的研究可以更好的对5G 3GPP协议中涉及到的ASN.1结构的编码实现。
20 |
21 | 接下来本文对以上a-k种数据类型,分别按照基本定义/691协议编码内容/流程图/编码实例等步骤进行讲解,
--------------------------------------------------------------------------------
/1.1 车路协同/2.V2X/全国V2X建设思路.md:
--------------------------------------------------------------------------------
1 | # 全国V2X建设思路
2 |
3 | https://blog.csdn.net/uxuepai5g/article/details/117267789
4 |
5 | “**当前我国车联网产业呈现蓬勃发展的势头,但在跨行业协调、运营管理等方面还面临不少的新挑战,迫切需要各方面继续做好协同,凝聚发展合力,我们愿同大家一道探索实践车联网先导应用创新发展工作,推动我国车联网产业更好更快地发展,为制造强国、网络强国、交通强国的建设做出更大的贡献。**”**工业和信息化部科技司司长刘多在近日召开的第五届世界智能大会上表示。**
6 |
7 | 刘多还表示,先进制造业和现代服务业深度融合的新业态,已经成为世界各国竞争的新热点。我国高度重视车联网发展,“十四五”规划做出了明确的部署,目前我国主导的蜂窝车联网无线通信技术已经成为国际主流标准并加速产业化,聪明的车与智慧的路协同发展的技术路线也得到了广泛的认可。
8 |
9 | 刘多介绍,今年4月,国家制造强国建设领导小组车联网产业发展专委会召开了第四次全体会议,对车联网产业未来的发展做出了明确的部署,提出了明确的要求,下一步工信部将积极地抓好落实,**重点开展以下四个方面工作:**
10 |
11 | **一是深化融合创新,加强统筹布局。**车联网产业涉及通信、电子、汽车、交通等多个环节,要深化协同创新,结合5G部署,夯实车联网发展优势,并将车联网与智慧城市、智能交通等工作统筹推进,同时要加强对重点环节的技术创新的支持和引导,实现产业链短板的逐个突破,推动形成开放融合、创新发展的产业生态。
12 |
13 | **二是突出条块结合,建好基础设施。**车联网正在从试点示范向规模部署转变,基础设施应该先行一步。刘多指出,要进一步地突出条块结合,在条上推进重点高速公路车联网改造,在块上抓好重点城市的车联网建设。希望天津(西青)国家级车联网先导区能够发挥好引领作用,加快交通设施车联网功能的改造和系统能力的提升,做好信息基础设施与交通基础设施的协同建设。
14 |
15 | **三是把握需求方向,坚持应用牵引。**要针对人民群众对提升交通安全、缓解交通拥堵、改善城市治理等迫切需要,区分行业用户和普通用户的不同需求,开发更多的应用场景,形成实用化的解决方案,切实改善群众日常出行品质,要把握技术、产品及市场的发展趋势,逐步建立合理的建设和运营机制,探索完善可持续发展的商业模式。
16 |
17 | **四是促进互联互通,强化安全管理。**要提早谋划加强关键标准规范的制定与执行,做好大数据及云平台的建设管理,实现车路人云网信息交互与数据共享,促进车联网行业跨地区的互联互通。同时,还要推动建立车联网数字身份认证机制,加强网络和信息安全工作,从源头上提升产品和服务安全水平,促进产业健康可持续的发展。
18 |
19 | 来源:人民报
--------------------------------------------------------------------------------
/1.1 车路协同/2.V2X/车联网V2X通信认证体系.md:
--------------------------------------------------------------------------------
1 | # 车联网V2X通信认证体系
2 |
3 | 
4 |
5 | # V2X CA云端建设方案
6 |
7 | ## V2X PKI保护消息真实性、完整性
8 |
9 | 
10 |
11 | ## 车联网安全总体方案
12 |
13 | 
14 |
15 | ## 车联网PKI安全总体方案
16 |
17 | 
18 |
19 | ## OEM V2X PKI建设方案
20 |
21 | 
22 |
23 | ## 多根下的互联互通
24 |
25 | 
26 |
27 | # V2X车端建设方案
28 |
29 | ## V2V、V2I安全中间件
30 |
31 | 
32 |
33 | ## 终端密钥安全
34 |
35 | 
36 |
37 | ## V2N、V2P车云安全中间件
38 |
39 | 
40 |
41 | # 项目建设及安全应用
42 |
43 | ## 建设方案
44 |
45 | 
46 |
47 | ## 项目计划
48 |
49 | 
50 |
51 | ## V2X安全服务能力
52 |
53 | 
--------------------------------------------------------------------------------
/1.1 车路协同/3.网络:LTE/LTE流程.md:
--------------------------------------------------------------------------------
1 | - [LTE流程](https://www.cnblogs.com/zhangbing12304/p/9261029.html)
2 |
3 | LTE 过程全流程
4 |
5 | 1. UE处于关闭状态
6 | 2. 打开UE电源。
7 | 3. 搜索附近的频率
8 | 4. 同步时间
9 | 5. 小区搜索
10 | 6. 小区选择
11 | 7. 解码MIB
12 | 8. 解码SIB
13 | 9. 初始化RACH过程
14 | 10. 注册/认证/附着
15 | 11. 建立默认EPS承载
16 | 12. EPS处于IDLE状态
17 | 13. <如果此时当前小区信号变弱或者UE移动到另外的小区去的情况>小区重选
18 | 14. <如果此时UE侦测到了寻呼消息或者UE发起了拨号>RACH过程
19 | 15. 建立专用EPS承载
20 | 16. 接收数据
21 | 17. 传输数据
22 | 18. <如果此时网络接收到的UE信号太弱>网络向UE发出TPC指令,要求UE提高传输能量
23 | 19. <如果此时网络接收到的UE信号太强>网络向UE发出TPC指令,要求UE降低传输能量
24 | 20. <如果此时UE移动到另外的小区>网络和UE之间进行切换
25 | 21. 用户停止通话,UE回到IDLE模式。
26 |
27 | 国际移动客户识别码(International Mobile Subscriber Identification Number)
28 | 为了在无线路径和整个GSM移动通信网上正确地识别某个移动客户,就必须给移动客户分配一个特定的识别码。这个识别码称为国际移动客户识别码(IMSI),用于GSM移动通信网所有信令中,存储在客户识别模块(SIM)、HLR、VLR中。IMSI号码结构为:
29 | MCC+MNC+MSIN (国际移动客户识别 +国内移动客户识别+移动客户识别码 )
30 |
31 | 
32 |
33 | MCC=移动国家号码,由3位数字组成,唯一地识别移动客户所属的国家。中国为460。
34 | MNC=移动网号,由2位数字组成,用于识别移动客户所归属的移动网。
35 |
36 | - 中国移动公司GSM PLMN网为00
37 | - 中国联通公司GSM PLMN网为01。
38 |
39 | MSIN=移动客户识别码,采用等长11位数字构成。唯一地识别国内GSM移动通信网中的移动客户。
40 |
41 | 国际移动台设备识别码(International Mobile Equipment Identity)
42 | 唯一地识别一个移动台设备的编码,为一个15位的十进制数数字,其结构为:
43 |
44 | 
45 |
46 | TAC=型号批准码,由欧洲型号认证中心分配。
47 | FAC=工厂装配码,由厂家编码,表示生产厂家及其装配地。
48 | SNR=序号码,由厂家分配。识别每个TAC和FAC中的某个设备的。
49 | SP=备用,备作将来使用。
--------------------------------------------------------------------------------
/1.1 车路协同/5.3 车路协同标准进度汇报/2021版团标体系系列解读 助力中国方案技术体系,构建智能网联汽车云控系统系列标准.md:
--------------------------------------------------------------------------------
1 | - [2021版团标体系系列解读 | 助力中国方案技术体系,构建智能网联汽车云控系统系列标准](https://mp.weixin.qq.com/s/BxVFuvr3DczUnXGy08qpzw)
2 |
3 | ## **1. 研究背景**
4 |
5 | 单车智能技术路线存在车端感知范围有限、车间行为面临博弈与冲突、单车依靠局部信息进行的规划与控制难以实现全局优化等问题。传统车路协同技术主要强调车与路侧设备之间的协同,利用车与车、车与路之间的信息交互辅助单车决策,虽然可以解决单车智能面临的部分问题,但仍难以实现面向区域级网联应用中的群体协同决策,不能满足基于车辆和道路动态数据的智能网联汽车与智能交通系统的实时交互、全局管控与优化等方面的实际要求。近年来随着智能网联汽车的推广与普及,特别是车联网、5G通信、云/边缘计算等技术的快速发展,围绕多车系统、车路系统、车路云融合系统的协同决策与控制技术得到行业广泛关注。
6 |
7 | 云控系统从车路云一体化融合控制的角度重构了车辆、交通基础设施、通信技术、计算服务等智能网联汽车核心领域之间的技术链与价值链,实现“人–车–路-网–云”系统协同。云控系统不仅能够为单车决策提供丰富的信息,还可以实现智能网联汽车与智能交通系统的协同发展,提升道路交通综合性能。
8 |
9 | 2020年9月中国智能网联汽车产业创新联盟(以下简称联盟)发布云控系统白皮书,从云控系统的界定、总体架构、组成、关键技术、系统特征及其云控基础平台的核心作用等方面形成了广泛的共识。
10 |
11 | 
12 |
13 | 图1 车-路-云一体化融合控制系统总体架构示意图
14 |
15 | 基于上述共识,全国各城市的示范区、先导区、测试场的运营企业,积极布局云控系统,并推进大量基础性的云控功能应用,根据公开资料,目前关于云控系统及云控基础平台相关建设项目如下表所示:
16 |
17 | 表1 部分云控系统及云控基础平台相关项目列表
18 |
19 | 
20 |
21 | 虽然云控相关在建项目逐渐增多,但已有标准主要围绕云平台或车路协同领域的架构、通信网络、应用层消息等方面开展研制,在车路云数据交互、服务、测试及安全等方面的相关技术标准仍存在缺失或不足。同时,智能网联汽车云控系统的产业生态具有参与者类型众多、体量庞大、产业链较长的特点,对云控系统相关技术的标准化提出了更高要求,亟需制定能够支撑智能网联汽车云控系统各组成部分之间的数据交互、云控基础平台建设、安全防护、测试评价等方面的系列标准。
22 |
23 | ## **2. 标准子体系**
24 |
25 | 智能网联汽车云控标准涉及内容多,为保证标准的完整性与体系化,相关标准建设将围绕智能网联汽车云控系统组成及基础平台架构、数据交互规范、服务场景规范、服务质量规范、安全要求、测试方法、建设指南等开展相关标准需求分析、核心关键标准制定,形成《智能网联汽车云控系统》系列标准,如表2所示。标准以云控基础平台为核心,打破以往的信息壁垒,使得基础数据互联互通,基础设施复用共享,支撑云控应用的生态建设。进一步地,为各地智能网联示范区、先导区、测试场及云控平台建设形成指导方案,由点及面逐步推广,构建和完善中国方案智能网联汽车云控系统标准体系。
26 |
27 | 表2智能网联汽车云控系统相关标准规划
28 |
29 | 
30 |
31 | ## **3. 组织实施**
32 |
33 | 联盟依托基础数据平台工作组,开展《智能网联汽车云控系统》系列标准的研制,并于2021年10月通过CSAE团标立项审查。本系列标准分两阶段开展,第一阶段先行推进第1部分、第2部分、第3部分和第5部分的研制,目前已完成初稿并协同起草单位征求意见。第二阶段拟于2022年第1季度启动,推进其余5部分标准的研制。
34 |
35 | 未来,联盟依托基础数据平台工作组,并根据各地的云控项目推进及实际应用情况,不断更新、完善智能网联汽车云控系统标准体系,组织行业力量有序推进相关标准研制,最终助力中国智能网联汽车云控系统技术方案的商业化落地应用。
--------------------------------------------------------------------------------
/1.1 车路协同/5.3 车路协同标准进度汇报/《车路协同路侧感知系统》系列标准汇报.md:
--------------------------------------------------------------------------------
1 | # 《车路协同路侧感知系统》系列标准汇报
2 |
3 | 王鲲:北京百度智行科技有限公司
4 |
5 | # 一、路侧感知概述
6 |
7 | ## 路侧感知系统组成
8 |
9 | 
10 |
11 | ## 路侧感知系统应用场景
12 |
13 | 
14 |
15 | ## 路侧感知系统等级
16 |
17 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/中国移动/中国移动车路协同V2X智慧交通解决方案 .md:
--------------------------------------------------------------------------------
1 | - [车路协同V2X智慧交通解决方案](http://iot.10086.cn/solution/read/id/1411)
2 |
3 | 
4 |
5 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/中国移动/中国移动车路协同解决方案.md:
--------------------------------------------------------------------------------
1 | [中国移动车路协同解决方案](https://ecloud.10086.cn/home/solution/traffic/cvi)
2 |
3 | # 车路协同解决方案
4 |
5 | 以C-V2X为核心,融通“人-车-路-网”四要素,提供安全高效的信息服务。车路协同云平台综合利用路侧全息感知设备,形成对交通状况的全面感知,将感知数据分析计算结果通过5G网络或C-V2X网络下发给车辆,提供车路协同安全预警服务,并为自动驾驶提供感知及决策支撑。
6 |
7 | 
8 |
9 | 
10 |
11 | ## 方案架构
12 |
13 | #### 方案优势
14 |
15 | - ##### 全场景
16 |
17 | 支持高速、智能网联示范区、城市开放道路、港区、园区等典型场景应用,后续应用场景将持续扩展。支持近20个V2X应用,同时支持多种典型网络协议接入,实现人、车、路、网的全联接。
18 |
19 | - ##### 边云协同
20 |
21 | 基于开放的MEC边缘计算架构,实现边缘智能算法更新、边缘管理规则更新和全局状态监控等功能,助力C-V2X与MEC的深度融合。
22 |
23 | - ##### 5G赋能
24 |
25 | 5G Uu空口与PC5空口可支持V2X的业务,达到低时延、高可靠性、大带宽、高速移动的需求。同时借助5G SA网络和MEC,可实现V2X低时延应用。
26 |
27 | 
28 |
29 | ## 客户案例
30 |
31 | ### 某市5G车路协同示范项目
32 |
33 | 案例介绍:某市5G车路协同示范项目定位为在半开放环境下的智能网联汽车道路测试区,可满足智能网联汽车测试、智能网联企业评估以及政府职能部门的服务与监管需求。中国移动部署了车路协同平台,提供包括路侧5G超视距透视、红绿灯信息推送、路口行人防碰提醒等应用服务, 实现了国内基于5G无线空口(Uu空口)的车路协同多业务验证案例。
34 |
35 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/京东云车路协同解决方案.md:
--------------------------------------------------------------------------------
1 | # 车路协同解决方案
2 |
3 | 提供以物联管理平台为核心,结合城市云基地,面向5G“新基建”背景下的智能城市交通路网基础设施连接节点建设,落地车载和路侧单元,为智能城市云和物流无人车提供道路信息采集。
4 |
5 | # 方案详述
6 |
7 | ## 路网设备管理平台支撑5G-V2X车路协同
8 |
9 | 京东车路协同在终端硬件、数据、边缘计算、平台、服务和应用场景实现了端到端全链条打通,以物联管理平台为基础,连接车载单元、路侧单元、智能路基终端等设备,进行信息采集、数据分发、数据分析等服务,实现了18种交通场景触达,覆盖智能路基、智能交通、智能园区、无人场景等多种场景化应用
10 |
11 | 
12 |
13 | # 典型场景
14 |
15 | ## 智能路基
16 |
17 | 对道路摄像头、传感器等信息采集和分析,通过车载单元和路侧单元的通信,为自动驾驶车辆和基于车载单元的辅助驾驶车辆提供结构化数据服务,包括弱势交通参与者碰撞预警、前向车道施工预警等,提升交通效率和安全性。
18 |
19 | 
20 |
21 | ## 智能交通
22 |
23 | 对道路摄像头、传感器等信息采集和分析,通过车载单元和路侧单元的通信,为自动驾驶车辆和基于车载单元的辅助驾驶车辆提供结构化数据服务,包括弱势交通参与者碰撞预警、前向车道施工预警等,提升交通效率和安全性。
24 |
25 | 
26 |
27 | ## 无人场景
28 |
29 | 车路协同解决方案用于提升低速无人驾驶汽车的决策控制能力、环境感知能力、高精度定位能力等,与京东无人物流车、巡检机器人等优势技术相结合,提供更高效的无人物流、无人巡检的场景化解决方案。
30 |
31 | 
32 |
33 | ## 智能灯杆
34 |
35 | 智能灯杆集车路协同、5G基站、视频监控、信息发布、充电桩等为一体,无人驾驶汽车可使用智能灯杆的数据服务和充电补给,减少城市杆体的重复建设、节约城市地面和空间资源,并具备无人驾驶汽车的运营能力。
36 |
37 | 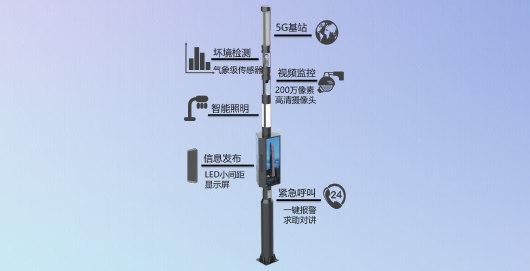
38 |
39 | # 方案优势
40 |
41 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/光庭公司智能网联解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/北京米文动力科技有限公司.md:
--------------------------------------------------------------------------------
1 | - 北京米文动力科技有限公司
2 |
3 | ## 车路协同概述
4 |
5 | 
6 |
7 | ## 车路协同的价值场景
8 |
9 | 
10 |
11 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/千寻位置-车路协同解决方案.md:
--------------------------------------------------------------------------------
1 | - [车路协同解决方案](https://www.qxwz.com/lp/cheluxietong)
2 |
3 | # 车路协同解决方案
4 |
5 | 随着数字技术与汽车产业的深度融合,智能网联汽车正逐渐成为全球汽车产业发展的战略制高点,千寻位置针对V2X的17个Day 1应用,提供实现人-车-路-云高效协同,路端以及各种物联网终端的高达厘米级定位及毫秒级授时组合服务,为V2X的交通安全、交通效率、自动驾驶及信息服务等四大应用方向提供全方位的精准时空能力。
6 |
7 | # 解决方案框架
8 |
9 | 
10 |
11 | # 方案优势
12 |
13 | ## 360度位置感知
14 |
15 | 提供全天候V2X通信范围内精准定位,不受视线遮挡、恶劣气候等因素干扰,实现精准盲区预警
16 |
17 | ## 高准确预测
18 |
19 | 为车辆提供可靠的精准位置,在紧急制动预警、前向碰撞预警等安全功能中减少误报漏报。
20 |
21 | ## 高频动态更新
22 |
23 | 提供10Hz及以上频率的位置、速度、航向角信息,保证实时数据更新,应对快速变化的交通场景
24 |
25 | ## 车路时间同步
26 |
27 | 为V2X及物联网终端提供统一的时间体系,保障数据互联互通,提升边缘计算单元(MEC)使用数据的有效率,从而实现复杂协同功能
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/华道兴车路协同云平台.md:
--------------------------------------------------------------------------------
1 | # 车路协同云平台
2 |
3 | ## 系统简介
4 |
5 | 车路协同云平台基于道路交通综合管控平台开发,首先实现车路协同设施安全接入验证服务,确保接入交通设施的真实、安全及有效;其次扩充接入信息类别,包括前端智能网联汽车信息、交通基础设施信息、事故信息、气象信息等信息接入接口;另增加数据统计、分析、显示的内容。帮助交通管理者实时了解路网的总体运行状况、气象环境、车流变化规律等信息;为自动驾驶车辆提供可靠的出行预测、规划决策,还可根据交管需要提供道路交通状况的远程实时监测。
6 |
7 | ## 系统应用
8 |
9 | 
10 |
11 | ## RSU设备
12 |
13 | ## 系统简介
14 |
15 | RSU作为C-V2X技术的路边单元,负责接收交通信号机/应用服务器下发的路况信息等实时交通信息,并动态播报给通行车辆,降低、规避交通事故,提升交通通行效率。
16 |
17 | HDX RSU是基于3GPP R14 LET-V2X技术开发的路侧网络设备,支持低时延的V2X数据广播,赋能智联网联汽车实现自动驾驶。目前主要面向交通、公安等政府/行业及运营商用户。
18 |
19 | ## 系统应用
20 |
21 | 
22 |
23 | # OBU设备
24 |
25 | ## 系统简介
26 |
27 | OBU作为C-V2X技术的车载单元,利用PC5口语RSU/OBU进行通信,实现C-V2X中的V2V、V2P、V2I和V2N功能,支持全自动驾驶服务。
28 |
29 | HDX OBU部署于智能网联汽车,负责接收周边汽车数据包及路侧RSU单元广播数据包。车辆装载 OBU 设备后,基于V2X 协议与其它车辆进行交互及通信,从而保障行驶的主动安全;另通过 OBU 与智能路侧单元的通信和行人的感知,实现人、车、路、云的协同管理,为自动驾驶最终实现提供支撑。
30 |
31 | ## 系统应用
32 |
33 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/无锡数据湖.md:
--------------------------------------------------------------------------------
1 | http://wxdatalake.com/solution/%E4%BA%A4%E9%80%9A%E8%A1%8C%E4%B8%9A%E8%A7%A3%E5%86%B3%E6%96%B9%E6%A1%88/
2 |
3 |
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/星云互联/V2X智能云端服务.md:
--------------------------------------------------------------------------------
1 | - [V2X智能云端服务](http://nebula-link.com/Solution/index)
2 |
3 | # 一、智能云端服务
4 |
5 | ## 1.1 绿波车速引导
6 |
7 | 
8 |
9 | ### 1.1.1 场景介绍
10 |
11 | - 通过RSU+路侧系统将路口信号灯的配时和实时状态
12 |
13 | - 信息进行采集和上传,车载设备通过网络连接到V2X
14 |
15 | - 云平台,调用远程服务接口,给车辆提供绿波车速引导服务。
16 |
17 | # 二、V2X大数据平台
18 |
19 | V2X大数据平台展示V2X系统运行的实时状态,对车端数据和路端数据进行实时采集和管理,监测设备运行状态。
20 |
21 | ## 2.1 V2X设备数据采集
22 |
23 | 
24 |
25 | ### 2.1.1 场景介绍
26 |
27 | **车端数据采集:**
28 |
29 | ●显示车载设备总数和上线数
30 |
31 | ●显示车载信息传输统计信息,包括BSM等
32 |
33 | ●显示应用触发的情况,包括盲区预警、追尾预警、故障车辆预警、紧急刹车预警等场景的统计数据
34 |
35 | **路侧数据采集:**
36 |
37 | ●显示路侧设备总数和上线数
38 |
39 | ●显示V2I应用触发的情况,包括道路湿滑,紧急弯道等
40 |
41 | ●显示路侧系统检测器检测的结果统计
42 |
43 | ●显示路侧信息传输统计信息,包括RSM、MAP、SPAT等
44 |
45 | ## 2.2 V2X系统实时运行展示
46 |
47 | ### 2.2.1 场景介绍
48 |
49 | ●展示车辆基本信息,包括车载设备ID、车辆类型、速度、航向、位置
50 |
51 | ●展示V2X实时通信状态,包括消息类型和消息长度
52 |
53 | ●展示V2X应用触发情况,包括V2V和V2I应用
54 |
55 | ### 2.2.2 实际界面显示
56 |
57 | 
58 |
59 | ### 2.2.3 相关信息
60 |
61 | ●提供三维视图和多种底图展示,支持回放功能
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/星云互联/基于RSU+的交通协同管控.md:
--------------------------------------------------------------------------------
1 | - [基于RSU+的交通协同管控](http://nebula-link.com/Solution/index)
2 |
3 | # 一、交通智能管控
4 |
5 | RSU+一方面具有与车辆和行人等通信终端的通信能力,另一方面可以与路侧系统的信号灯、摄像头、微波雷达、可变信息牌等相连接,进行信息的采集和发布。通过RSU+对以上信息和能力的整合,可以实现交通事件的发布、交通违章的监管以及远程车辆监控等功能。
6 |
7 | ## 1.1 交通事件发布
8 |
9 | ### 1.1.1 场景介绍
10 |
11 | **多种事件发布:**
12 |
13 | ●路况信息
14 |
15 | ●临时施工区域信息
16 |
17 | ●交通管制信息
18 |
19 | ●路面状况信息(道路湿滑等)
20 |
21 | ●其他相关交通信息
22 |
23 | **多渠道发布:**
24 |
25 | ●通过运营商网络发至智能终端
26 |
27 | ●通过短程通信发至周边车辆
28 |
29 | ●通过可变信息牌发布交通事件
30 |
31 | ### 1.1.2 实际界面显示
32 |
33 | 
34 |
35 | # 二、交通智能优化
36 |
37 | 利用以RSU+为中枢的路侧系统,组成区域、城市级的交通智能优化系统,通过V2X技术实时获取全区域、全城市的交通状况和控制信息,利用优化算法改善信号控制系统,提升城市交通通行能力。同时也可以根据特殊类型车辆的需求实时动态调整局部信号状态,实现特殊车辆的优先通行。
38 |
39 | ## 2.1 信号灯优先控制
40 |
41 | ### 2.1.1 场景介绍
42 |
43 | ●公交车优先通行
44 |
45 | ●紧急车辆优先通行
46 |
47 | ●特勤车辆优先通行
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/星云互联/开放的V2X可编程平台.md:
--------------------------------------------------------------------------------
1 | - [开放的V2X可编程平台]
2 |
3 | # 一、OBU端嵌入式开发套件
4 |
5 | 嵌入式开发套件提供了在车载设备的Linux操作系统进行应用开发的环境,提供了包括自身信息、周边OBU信息、周边RSU信息等近10种V2X数据,同时提供碰撞检测、车速引导等算法接口和自定义消息传输接口。
6 |
7 | ## 1.1 基于OBU嵌入式发开套件研发的网联自动驾驶车队控制算法
8 |
9 | ### 1.1.1 丰富接口
10 |
11 | ●自定义消息传输接口,传输开发人员自定义格式数据。
12 |
13 | ●V2X应用算法接口,提供算法数据结果,包括碰撞检测和车速引导等。
14 |
15 | ●V2X原始数据接口,提供数据流格式,便于开发人员根据需求选取数据内容。
16 |
17 | ●V2X数据封装接口,提供封装后的数据类型,开发人员可快速访问所有数据并建立自己的应用。
18 |
19 | # 二、OBU端Java上位机开发套件
20 |
21 | Java开发套件提供了包括自身状态信息、周边OBU信息、周边RSU信息、路侧检测器结果信息、V2X专用地图、交通事件信息、信号灯状态信息等V2X数据,同时也提供碰撞检测、车速引导等算法接口,便于开发人员构建Java平台上的V2X应用。
22 |
23 | ## 2.1 车速引导
24 |
25 | 
26 |
27 | ### 2.1.1 丰富接口
28 |
29 | ●自定义消息传输接口,传输开发人员自定义格式数据。
30 |
31 | ●V2X数据封装接口,提供封装后的数据类型,开发人员可快速访问所有数据并建立自己的应用。
32 |
33 | ●V2X应用算法接口,提供算法数据结果,包括碰撞检测和车速引导等。
34 |
35 | ●V2X原始数据接口,提供数据流格式,便于开发人员根据需求选取数据内容。
36 |
37 | ### 2.1.2 开发案例
38 |
39 | 
40 |
41 | ### 2.1.3 测试套件
42 |
43 | ●提供专业测试软件查看V2X系统运行状态,提升开发效率
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/百度/自动驾驶车路协同一体化解决方案.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶车路协同一体化解决方案](https://apollo.auto/v2x/index_cn.html)
2 |
3 | ## V2X车路云协同技术
4 |
5 | 提供全局视野,为自动驾驶与智能交通提供泛在连接技术与端到端应用服务
6 |
7 | 
8 |
9 | ## 车路协同为城市交通提供全域感知能力
10 |
11 | 
12 |
13 | ## 自研路侧计算单元 RSCU
14 |
15 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.1解决方案/雅迅网络5G+C-V2X车路协同云控平台 .md:
--------------------------------------------------------------------------------
1 | # 5G+C-V2X车路协同云控平台
2 |
3 | ## 方案概述
4 |
5 | 雅迅5G-V2X车路协同云控平台是一套集成路侧设备感知管理、车辆网联管理的云控服务管理平台,系统基于无线通信、传感探测等技术进行车路信息的获取,并通过车车、车路信息交互和共享,实现车辆和基础设施之间智能协同与配合达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标。系统功能包括路侧设备管理、事件发布管理、交通数据管理、车辆定位服务、车辆远程视频监控、v2x车辆预警分析、远程驾驶监控、车辆信息发布等功能。在合作方案中,华为提供车路协同解决方案中的服务器、存储、网络设备、华为云Stack、RDS for MySQL、Redis、Atlas500、RSU、M系列摄像机等软硬件,雅迅提供5G-V2X云控平台和OBU设备,将雅迅5G-V2X云控平台部署在华为云Stack上,双方联合进行5G-V2X云控平台云化部署、接入管理、车辆安全监管、车辆运行数据分析、道路感知等场景化功能实现。
6 |
7 | ## 方案价值
8 |
9 | 通过合作方案的建设构建的5G+C-V2X车路协同云控平台,可以解决公共交通及封闭园区道路交通行业客户在车路协同管理业务环节的车辆行驶服务及道路交通管理的应用需求。系统可应用于V2X智慧高速的车路协同应用、v2x公交智慧出行、v2x智慧城市园林车辆管理、智慧园区v2x项目建设等应用场景。
10 |
11 | # 方案架构
12 |
13 | 
14 |
15 | 1.C-V2X演进业务涉及云端(平台端)、路侧端和车载端三个领域。
16 |
17 | 其中云端与第三方业务应用的信息中心,包含V2X展示平台、交通管理平台、V2X Server等,为路侧端和车载端发送全局的业务控制、业务共享信息,并存储全局设施、环境、用户、业务信息;路侧端与路侧信号控制器或者边缘服务器相连,收集驾驶、交通环境状态信息,进行路侧决策并发送路侧业务控制到车载端;车载端收集路侧控制信息、全局信息、周边环境信息进行动态感知及实时决策。
18 |
19 | 2.雅迅OBU是智能网联汽车应用场景实现的重要硬件基础,未来有望成为智能网联汽车标配,华为RSU是实现车-路协同的基础设施,车辆通过与路边设施 RSU建立通信,并由 RSU通过有线链路将车辆信息转发至云服务器,实现车辆与云服务器之间的安全互联互通。
20 |
21 | 3.通过在车辆安装OBU,OBU 支持与 RSU、其他 OBU 通过 PC5 进行 V2X 通信。
22 |
23 | OBU 支持红绿灯信息推送、车速引导、前向碰撞预警、交叉路口碰撞预警、左转辅助、道路危险状况提醒、限速提醒、绿波车速引导、车内标牌、前方拥堵提醒等应用场景。
24 |
25 | 4.通过在路测端部署华为RSU可实现 V2X 通信,支持 V2X 应用。它具备 LTE-V2X Uu 和 PC5 双模通信能力,内嵌 C-ITS 应用协议栈,可支持多种 V2X 消息;它可自动连接 V2X 平台,可实现复杂的 V2X 业务逻辑,以及自动化的远程控制与管理。
26 |
27 | RSU 支持路侧交通设施(信号机、传感器、标识标牌等)数据的收集,通过MEC边缘计算,收集雷达、摄像头等感知设备的数据,RSU通过 PC5 与 OBU进行 V2X 通信, 支持红绿灯信息推送、道路危险状况提醒、限速提醒、绿波车速引导、车内标牌、前方拥堵提醒等应用场景。
28 |
29 | 5.V2X Server支持第三方平台数据接入(如交通管理平台、气象平台、智慧城市平台),通过有线网络将数据场景下发至车载OBU,支持道路施工提醒、可变限速提醒、危险天气提醒、前方拥堵提醒等场景。
30 |
31 | 同时,V2X Server可以搜集OBU和RSU上传的数据信息,提高交通通行效率和交通安全。
--------------------------------------------------------------------------------
/1.1 车路协同/9.2应用解决方案/路侧系统/面向车路协同的智慧路侧系统设计.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/2021中国车路协同产业科技创新TOP10.md:
--------------------------------------------------------------------------------
1 | - [2021中国车路协同产业科技创新TOP10]
2 |
3 | 2021年12月21日,由亿欧EqualOcean主办的“数字重塑世界-WIM2021世界创新者年会”在上海正式拉开序幕。作为此次WIM2021峰会的主要组成部分,12月21日-22日,“GTM2021全球科技出行论坛”在上海成功召开。
4 |
5 | 本届峰会期间,亿欧汽车针对汽车产业在2021年的表现进行了总结,并对未来发展趋势给出了预判。通过梳理全年产业和投资研究工作成果,基于深度的市场洞察与产业研究,亿欧汽车携手亿欧智库,推出“WIA2021世界创新奖暨科技出行产业创新榜”系列榜单及报告,并于12月21日举办的WIA2021世界创新奖晚宴期间正式发布。
6 |
7 | GTM2021全球科技出行论坛设置了行业榜、企业榜、投资机构榜,涉及领域包括智能汽车、智能座舱、自动驾驶、新能源、汽车流通及服务数字化、立体出行等,涵盖企业及机构共109家。
8 |
9 | 面向行业和企业,亿欧汽车基于企业发展阶段、融资轮次、创新程度、技术储备、股权架构以及创始人背景等维度,结合年度内的市场调研与专家交流访谈,分别甄选出汽车行业内最具价值与前景,具有突出贡献的产业上下游企业(不含二级市场项目)。他们凭借自身的硬实力,丰富了中国科技出行产业图谱,是身体力行的价值创造者。目前,上榜企业共99家。
10 |
11 | 亿欧汽车根据从退、管、投、募四个维度及业务水平,综合筛选出2021年内在汽车出行领域取得出色成绩的私募股权基金,他们具有敏锐的投资嗅觉,是最佳投资捕手,也是创业者的最佳合作伙伴,他们面向未来与创业者一同推动中国科技出行创新发展。目前,上榜机构共10家,由PE/VC私募股权基金、产业资本、政府产业引导基金等基金类型构成。
12 |
13 | 每一年,汽车出行领域都会有无数优秀企业、机构不断涌现。亿欧汽车通过挖掘为汽车出行产业做出巨大贡献、有创新力和责任感的企业,树立行业标杆,为相关企业提供参考和借鉴,共同推动汽车出行产业创新发展。
14 |
15 | 基于此,亿欧汽车发布《2021中国车路协同产业科技创新TOP10》榜单。
16 |
17 | 在整个评选过程中,亿欧汽车针对车路协同产业上下游企业进行了梳理,从2021年业务进展、融资轮次、行业口碑、创始人经历、技术特点、商业模式等多个方面进行了评定,从中筛选出10家具备代表性的标杆企业。
18 |
19 | 评定维度分别包括:1、在所属行业领域具有一定影响力,被行业熟知,位列第一梯队,品牌价值明显;2、技术储备雄厚,商业模式清晰,商业化落地进展迅速,有持续性的经营性收入;3、成立于2014年及之后的年轻非上市企业,或未完成向交易所提供招股书的企业;4、2021年有重大业务进展或动作;5、最近一轮融资在近两年内,有机会IPO;6、企业运营稳定,拥有良好价值观;7、股权架构合理。
20 |
21 | 具体来看,上榜企业包括:**艾氪英语、北醒、海康智联、华砺智行、Innovusion、觉非科技、雷森电子、千寻位置、希迪智驾、星云互联。**
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/典型车路协同应用场景定义.md:
--------------------------------------------------------------------------------
1 | # 典型车路协同应用场景定义
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 |
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/车路协同专辑2022共享.md:
--------------------------------------------------------------------------------
1 | - [车路协同专辑2022共享](https://mp.weixin.qq.com/s/IGB2BM-dsu_rQGQu_Vfzfw)
2 |
3 | 本专辑收集了智能交通技术公号原创车路协同相关文章和国外关于车路协同、路侧智能、边缘计算等一些研究成果和应用案例,希望能够对同行有所帮助。
4 |
5 | 以下为专辑目录。
6 |
7 |
8 |
9 | 目 录
10 |
11 | 一自动驾驶之路——聪明的车还是智慧的路?
12 |
13 | 1 车
14 |
15 | 2 路
16 |
17 | 3 车路协同
18 |
19 | 4 小结
20 |
21 | 二车路协同应用场景分析
22 |
23 | 1 几个定义
24 |
25 | 2 关于车路协同几点理解
26 |
27 | 3 车路协同的主要功能
28 |
29 | 4 应用场景
30 |
31 | 5 小结
32 |
33 | 三车路协同全域感知与数据融合
34 |
35 | 1 概述
36 |
37 | 2 车路协同应用
38 |
39 | 3 车路协同感知体系
40 |
41 | 4 实时数据处理与信息融合
42 |
43 | 5 车路协同信息服务(简述)
44 |
45 | 6 小结
46 |
47 | 四车路协同边缘计算与边云协同
48 |
49 | 1 概况
50 |
51 | 2 边缘计算模型驱动参考架构
52 |
53 | 3 边缘计算CROSS功能
54 |
55 | 4 边云协同能力
56 |
57 | 5 边云协同参考架构
58 |
59 | 6 边缘计算节点系统安全
60 |
61 | 五车路协同服务云平台
62 |
63 | 1 概述
64 |
65 | 2 需求与应用场景分析
66 |
67 | 3 总体方案
68 |
69 | 4 车路协同应用系统
70 |
71 | 5 小结
72 |
73 | 六边缘智能——深度学习和边缘计算
74 |
75 | 1 什么是边缘计算
76 |
77 | 2 为什么我们需要边缘计算
78 |
79 | 3 缘智能结合人工智能和边缘计算
80 |
81 | 4 在网络边缘部署机器学习算法
82 |
83 | 5 下一步是什么?
84 |
85 | 七北京市自动驾驶车辆测试场建设概况
86 |
87 | 1 相关法规和标准
88 |
89 | 2 自动驾驶开放测试道路
90 |
91 | 3 封闭测试场
92 |
93 | 4 测试
94 |
95 | 5 道路测试监管
96 |
97 | 八智能网联汽车封闭测试场建设方案
98 |
99 | 1 背景
100 |
101 | 2 总体建设总体思路
102 |
103 | 3 建设内容
104 |
105 | 4 运营
106 |
107 | 九网联车辆和移动边缘计算,方便的结合
108 |
109 | 1 优势说明
110 |
111 | 2 云边结合的未来
112 |
113 | 十在自动驾驶设计中考虑伦理道德
114 |
115 | 1 科技伦理哲学
116 |
117 | 2 问题的症结是什么?
118 |
119 | 3 可能的解决方案之旅?
120 |
121 | 十一人工智能AI在智能交通领域中的应用
122 |
123 | 1 介绍
124 |
125 | 2 文献调查
126 |
127 | 3 框架
128 |
129 | 4 讨论
130 |
131 | 5 结论
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/车路协同典型应用.md:
--------------------------------------------------------------------------------
1 | 车路智能协同:https://wenku.baidu.com/view/2001a4e54ad7c1c708a1284ac850ad02de8007b9.html
2 |
3 | # 车路协同典型应用
4 |
5 | ## 1. 交叉口车路协同技术应用
6 |
7 | 
8 |
9 |
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | ## 2. 危险路段车路协同技术应用
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/车路协同技术发展现状与展望.md:
--------------------------------------------------------------------------------
1 | [车路协同技术发展现状与展望](https://wenku.baidu.com/view/16f4b57e4128915f804d2b160b4e767f5bcf80da.html?rec_flag=default&fr=pc_newview_relate-1001_1-3-wk_rec_doc-1001_1-3-16f4b57e4128915f804d2b160b4e767f5bcf80da&sxts=1621925137707)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/车路协同解决方案.md:
--------------------------------------------------------------------------------
1 | - [车路协同解决方案](https://wenku.baidu.com/view/6be8f97e86254b35eefdc8d376eeaeaad0f316c4.html)
2 |
3 |
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
--------------------------------------------------------------------------------
/1.1 车路协同/9.3车路协同报告、资料/面向智能网联汽车的车路协同综合管理平台.md:
--------------------------------------------------------------------------------
1 | 面向智能网联汽车的车路协同综合管理平台:http://gzis.ac.cn/Support-details-id-44.html
2 |
3 | # 平台概述
4 |
5 | 平台基于自主研发的车路协同通信应用协议栈、智能车载和路侧设备、路侧设施硬件等,通过以LTE-V为主的多种信息通信网络,将汽车附近和“超视距”进行采集,经由云端和边缘计算设施为智能网联汽车提供数据处理、存储、融合、分析,从而使汽车做出更加高效准确的路径规划和行为控制决策。
6 |
7 | 平台可应用于城市交通基础设施改造、城市交通管理和信息监管、智能网联汽车道路测试、示范建设与科技知识普及等,使现代城市生活变得更加便捷、安全和绿色。
8 |
9 | 
10 |
11 | # 01智能网联汽车路测管理系统
12 |
13 | 
14 |
15 | # 02智能驾驶示范综合应用与体验门户
16 |
17 | 
18 |
19 |
20 |
21 | # 车路协同协通信应用议栈及其场景应用
22 |
23 |
24 | 基于中国汽车工程协会《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》自主研发的车路协同通信应用协议栈,主要从安全和效率角度对车辆驾驶进行引导和预警,可支持17个典型车路协同应用场景,满足系统应用与不同通信方式或设备之间的兼容性和通信需要。
25 |
26 | 
27 |
28 | 
29 |
30 |
31 | 协议可支持的部分效率类、安全类车路协同应用场景示意图
32 |
33 |
34 |
35 | # 智能产品系列
36 |
37 | 
38 |
--------------------------------------------------------------------------------
/1.1 车路协同/9.4国内车路协同建设落地方案/南宁沙吴高速公路开展车路协同测试.md:
--------------------------------------------------------------------------------
1 | - [南宁沙吴高速公路开展车路协同测试](http://news.21csp.com.cn/c3/202110/11409915.html)
2 |
3 | 9月24日,由广西交通投资集团投资建设的南宁沙井至吴圩高速公路项目进行了车路协同测试,探索测试高速公路适应自动驾驶,为广西智慧交通发展迈出了重要一步。
4 |
5 | 车路协同是通过北斗高精度定位、毫米波雷达、[摄像机](http://b2b.21csp.com.cn/key/%C9%E3%CF%F1%BB%FA.html)、气象站等结合边缘计算、大数据等技术提供全方位的信息感知,构建高速公路的数字化世界,同时通过5G、V2X、物联网等技术将车与路、车与车、车与人都关联起来,实现车路协同。
6 |
7 | 沙吴高速建设有6个北斗差分基站,构建北斗高精度地基增强网,为车辆提供实时精确的位置信息;全线每隔350米布设摄像机和毫米波雷达,每隔700米布设边缘计算节点和路侧单元,重点路段布设微气象站,通过大数据平台分析,极大提高事件识别、发布和处理速度,为车辆实现自动驾驶提供全方位的数据支持,提高道路通行安全性。同时,沙吴高速还建设有一个综合云控平台,融合高速公路应急指挥系统、车路协同应用系统、数字孪生系统等作为智慧高速“大脑”。
8 |
9 | 据悉,沙吴高速是交通强国建设试点和广西交通运输科技示范工程,建成后对广西实施强首府战略、推进“一带一路”交通基础设施建设互联互通和西部陆海新通道建设等具有较大意义。将沙吴高速打造为开放的智慧交通试验测试平台,将推动5G通信网络服务、北斗导航与位置服务、车路协同、交通运行智能管控、新能源智能网联车等智慧交通产业、数字经济在广西发展,对东盟数字交通、智慧交通发展起到引领、示范作用。
10 |
11 |
--------------------------------------------------------------------------------
/1.1 车路协同/9.4国内车路协同建设落地方案/山东开通首条智慧高速,最长里程实现车路协同.md:
--------------------------------------------------------------------------------
1 | - [山东开通首条智慧高速,最长里程实现车路协同](http://xh.21csp.com.cn/c62/202110/11409939.html)
2 |
3 | 齐鲁金秋,收获满满。9月29日,由山东高速集团投资建设的京台高速泰安至枣庄段双向八车道改扩建项目通车。
4 |
5 | 山东京台泰枣段智慧高速全长189.5公里,是全国首条全线开通的“改扩建+智慧高速”交通强国试点项目,也是山东省首条智慧高速公路试点项目,该项目是目前国内里程最长、规模最大、应用场景最丰富、设备配置最优、施工组织难度最大的智慧高速,项目建成全国里程最长的开放式车路协同试验路段,打造了一条安全畅行的舒适高速、智慧管理的数字高速、创新赋能的科技高速、绿色低碳的生态高速。
6 |
7 | 本项目建成了全国里程最长的开放式车路协同试验路段(单侧20公里),华为参与了该试验段的交付和实施,实现了为驾驶者提供来自路侧的感知精准信息,例如道路事件状况提示、合分流区安全预警等,为高速公路运营者提供车道级精准管控、车流量统计、事件快速响应等服务,将有效提升道路行车安全与效率。华为利用在无线通信、机器视觉、边缘计算、雷视融合等方面的技术积淀,以及在车路协同、轨迹追踪、全息感知、事件预警等方面的深刻理解,与山东高速集团共同突破雷视融合、车道级精准定位,轨迹连续追踪等关键技术难关、联合创新,实现了异常事件快速检测、视距外车道或合流区预警、提升道路行车安全效率等功能,并取得了以下三方面关键突破:
8 |
9 | **第一**
10 |
11 | 通过使用雷视融合技术对路侧雷达、视频监控在时空同步下做精准匹配和数据拟合,形成完全时空同步和数据融合的轨迹信息,解决车牌识别不准、车速&车流不准、车辆轨迹跳变问题,位置感知精度达到1.5-2m。
12 |
13 | **第二**
14 |
15 | 在毫米波雷达精调、高精度标定的基础上,通过神经网络算法、雷达天线边缘调优算法,解决开放道路环境中,车牌遮挡(大遮小)、轨迹间断等问题,实现全域车辆目标轨迹图像高精度连续感知跟踪,单MEC设备内目标轨迹连续保持率达到95%以上。
16 |
17 | **第三**
18 |
19 | 在项目交付现场面对开放路段场景复杂、项目周期短等挑战,华为根据道路现场实际情况,与山东高速集团及时总结雷视融合综合感知系统调优方法,尤其是在开放道路的高精度标定和雷达调优,保障了京台智慧高速车路协同试验段的上线进度。
20 |
21 | 近期,中国公路学会在济南主持召开的“京台高速(泰枣段)绿色智能建造与智慧运维关键技术及工程应用”项目成果评价会上,中国工程院院士、山东大学副校长李术才,中国公路学会秘书长刘文杰,长安大学副校长赵祥模教授等10位专家组成的评审专家组认为京台智慧高速项目在高精度轨迹追踪技术、全息感知与智能管控技术等方面达到了国际领先水平,项目总体也达到国际先进水平。这也为后续其他智慧高速项目的建设和推广提供了宝贵经验和参考,是具有国际先进水平的智慧高速新标杆。
22 |
--------------------------------------------------------------------------------
/1.1 车路协同/9.4国内车路协同建设落地方案/武汉经开区即将启动国内最大规模车路协同测试.md:
--------------------------------------------------------------------------------
1 | - [武汉经开区即将启动国内最大规模车路协同测试](http://www.whkfq.gov.cn/xwzx/yw/kfqyw/qnxw/202110/t20211016_1796635.html)
2 |
3 | 10月16日,记者从武汉经开区获悉,2021 C-V2X“四跨”(武汉)先导应用实践活动即将启动。
4 |
5 | 本次活动由 IMT-2020(5G)推进组蜂窝车联(C-V2X)工作组、中国电动汽车百人会、武汉市经济和信息化局指导,武汉经济技术开发区主办,中国信息通信研究院承办,车都集团智慧科投公司、湖北移动、新能源汽车创新中心、武汉车百研究院、车网智联、华友等企业协办。
6 |
7 | 据了解,C-V2X“四跨”是国内规模最大的车路协同应用实践活动,能通过真实场景测试验证各类车路协同应用,已经连续举办3年,2020年有140余家企业参与。
8 |
9 | 
10 |
11 | 活动相关负责人介绍,“武汉经开区具备国内领先的车路协同技术和最丰富的测试场景,这对我们组织方和参与测试企业都是非常难得的资源,预计这次活动会吸引超过70家企业参与”。
12 |
13 | 
14 |
15 | 位于武汉经开区的国家智能网联汽车(武汉)测试示范区是我国第六个、中部首个国家级智能网联汽车测试示范区,也是本次测试的主场。
16 |
17 | 
18 |
19 | 经过两期建设,目前示范区已建设106公里基于开放标准的智能道路并投入运营,以及5G通讯网、高精地图、北斗高精度定位网、高精度城市三维空间模型等相关的智能基础设施,能为活动提供全面的技术支撑。
20 |
21 | 据悉,本次2021 C-V2X“四跨”(武汉)先导应用实践活动将分三个阶段。首先进行的是C-V2X大规模测试,计划于10月17日启动。
22 |
23 | 通过在经开区川江池四路与川江池三路附近区域模拟真实道路环境下的大规模智能网联车辆密集通信的场景,面向芯片模组、终端、整车等全环节开展规模应用环境下的C-V2X通信性能和应用功能测试。
24 |
25 | 10月中下旬开始全息路口测试,预计将持续到12月。该活动将选定测试路口作为专项测试区域,对各参与企业进行多维度全项化评测,进一步验证相关技术及标准成熟度。同时也以武汉活动测试总结为样本,为全国车联网先导区建设提供方案选型新依据。
26 |
27 | 11月1日-3日进行C-V2X“四跨”应用示范活动颇具“武汉特色”,将依托武汉示范区已建成的智能化基础设施和云控平台及车路云整体协同环境,面向公众进行应用示范演示,届时市民也可参与体验。
28 |
29 | 国家智能网联汽车(武汉)测试示范区相关负责人表示, C-V2X“四跨”(武汉)先导应用实践活动是一个很好的开始,“示范区具备很好的基础,未来或将吸引更多活动落地车谷”。
--------------------------------------------------------------------------------
/1.1 车路协同/9.4国内车路协同建设落地方案/重庆石渝高速:300套车路协同路侧设备让通行更安全.md:
--------------------------------------------------------------------------------
1 | - [重庆石渝高速:300套车路协同路侧设备让通行更安全](http://news.21csp.com.cn/c3/202110/11409914.html)
2 |
3 | 驾车出行时,你能否想象有这样的场景:在高速公路行车,前方车辆有异常时,车载系统可以及时提示和预警,避免你做出不安全驾驶行为;进出高速公路,两车有可能发生碰撞时,车载系统报警并主动刹车;前方道路发生拥堵、湿滑、有障碍物(如故障车)时,智能路侧设备实时感知并提示周边车辆绕行。
4 |
5 | 驾车出行时,你能否想象有这样的场景:在高速公路行车,前方车辆有异常时,车载系统可以及时提示和预警,避免你做出不安全驾驶行为;进出高速公路,两车有可能发生碰撞时,车载系统报警并主动刹车;前方道路发生拥堵、湿滑、有障碍物(如故障车)时,智能路侧设备实时感知并提示周边车辆绕行。
6 |
7 | 车路协同智慧G5021石渝高速涪陵至丰都段,就是这样一条“聪明的路”。该路段安装了300余台RSU(路侧单元)、400余套路侧感知、计算、显示设备,突发事件发生后反应精确到秒,可以将信息及时推送给路上行驶的车辆。
8 |
9 | 车路协同智慧G5021石渝高速,是国内在建的智慧高速中规模最大、场景最全、系统最完整的车路协同高速公路。目前,该高速实现了汇入主路及匝道150米范围、高速汇出前后300米、隧道出入口、隧道内全路段等区域的异常交通事件融合感知及高清[视频](http://b2b.21csp.com.cn/key/%CA%D3%C6%B5%BC%E0%BF%D8.html)[监控](http://b2b.21csp.com.cn/key/%BC%E0%BF%D8.html)全覆盖;基本实现可变信息情报板安全预警信息秒级实时发布。
10 |
11 | 记者在上述路段发现,这些路段安装了各种新型设备:毫米波雷达、激光雷达、边缘计算、视频传感器等先进设备,让所有危险路段、危险元素无处可藏。
12 |
13 | 对于为何要选择G5021石渝高速涪陵至丰都段作为车路协同试验路段,中交资管重庆区域管理总部安全总监于占强表示,作为山地高速,该段具有长隧道、特大桥、长下坡、急弯、团雾天气、积水、上下行车道分离等,适合探索分析高速公路行车多场景应用。
14 |
15 | “传统的车载导航系统,虽然可以获取事发区静态信息,但不能获取周围车辆实时信息、异常驾驶行为和道路突发状况。”于占强表示,这套名为C-V2X的车路协同系统让车、路有了相互感知能力。通俗地说,让车和路更聪明,变得有感觉、有记忆、有思考、易观察和会说话。有感觉,通过在道路上安装新设备,让道路和车辆可以实时感知外界变化;有记忆,通过大数据中心,存储感知数据和路侧信息场景;有思考,形成区域数据采集、计算、萃取、处理信息;易观察,建立路侧级、中心级的车路协同管理;会说话,数据、信息和画面实时传输、发布,实现秒级响应。
16 |
17 | 于占强称,该项目形成的车路协同系统主要构建了三方面的能力:
18 |
19 | 一是隧道增强感知,对隧道内的行车情况进行提前感知,为后进入隧道车辆提前预警隧道内情况,避免车速过快且无法辨别隧道内情况而引发事故;
20 |
21 | 二是事故多发区域专项治理,主要对急弯、急下坡、多雾、积水、施工区等通过感知单元进行事件检测、感知,借助可变信息情报板、车载终端实现车辆提醒及事故提前预警,实现智能安全诱导;
22 |
23 | 三是出入口事故综合防治,为车辆驾驶人员提供高速公路出入口、服务区出入口的道路合流区实时预警。
--------------------------------------------------------------------------------
/1.1 车路协同/ReadMe.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 本站文章引用或转载写明来源,感谢原作者的辛苦写作,如果有异议或侵权,及时联系我处理,谢谢!
4 |
5 | 更多车路协同,车路协同建设解决方案,参考链接:https://gitee.com/AiShiYuShiJiePingXing/smart-city
6 |
7 | - 个人网站:https://www.lovebetterworld.com/
8 |
9 | - QQ:1090239782
10 | - 微信:lovebetterworld
11 | - 公众号:爱是与世界平行
12 |
13 | 
14 |
15 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/1.OBU/OBU.md:
--------------------------------------------------------------------------------
1 | 百度百科:
2 |
3 | OBU(即On board Unit的缩写),直译就是车载单元的意思,就是采用DSRC(Dedicated Short Range Communication)技术,与RSU进行通讯的微波装置。在[ETC](https://baike.baidu.com/item/ETC)系统中,OBU放在车上,路边架设路侧单元(RSU-Road Side Unit),相互之间通过微波进行通讯。车辆高速通过RSU的时候,OBU和RSU之间用微波通讯,就像我们的非接触卡一样,只不过距离更远--十几米,频率更高--5.8GHz ,通过的时候,识别真假,获得车型,计算费率,扣除通行费。
4 |
5 | 在[ETC](https://baike.baidu.com/item/ETC)系统中,OBU采用DSRC技术,建立与[RSU](https://baike.baidu.com/item/RSU)之间微波通讯链路,在车辆行进途中,在不停车的情况下,实现车辆身份识别,电子扣费,实现不停车、免取卡,建立[无人值守](https://baike.baidu.com/item/无人值守/1774380)车辆通道。
6 |
7 | 在[车场管理](https://baike.baidu.com/item/车场管理/6025308)中,采用DSRC技术实现不停车快速车道,自动扣取[停车费](https://baike.baidu.com/item/停车费/2387847)。自2013年开始,所有的军车都安装OBU,实现车辆身份识别。
8 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/1.OBU/OBU发出.xmind:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/1.1.1 车路协同感知设备/1.OBU/OBU发出.xmind
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/1.OBU/OBU接收.xmind:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/1.1.1 车路协同感知设备/1.OBU/OBU接收.xmind
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/2.RSU/浪潮天鹰路侧计算单元.md:
--------------------------------------------------------------------------------
1 | - [浪潮天鹰路侧计算单元]([浪潮天鹰路侧计算单元正式发布 (inspur.com)](https://www.inspur.com/lcjtww/445068/445237/2598676/index.html))
2 |
3 | 浪潮新基建作为新型基础设施建设的骨干企业,以“车-路-云”有效协同为基础,以车路协同技术为引擎,通过部署多类型高精度传感器和高算力多源数据融合的边缘计算,利用高可靠、低延时的车联网通信技术,构建面向道路的智能交通数据基层平台,提升交通运输管理的智能化、精细化水平。天鹰路侧计算单元是浪潮新基建在车路协同领域的典型代表产品。
4 |
5 | ## 什么是浪潮天鹰路侧计算单元?
6 |
7 | 浪潮天鹰路侧计算单元是车路协同场景中路侧基础设施的设备核心组件,也是路侧感知系统的大脑,主要用于边缘感知和融合计算。它通过视联网、人工智能、边缘计算等技术,基于全量、连续环境的信息,准确识别路网交通状态、事件、车辆等,并进行数据采集,同时通过对采集的数据进行融合、处理和分发,实现对自动驾驶车辆、V2X网联车的安全辅助与效率引导支持,助力高速公路智慧化、数字化交通感知和管理水平的双提升。
8 |
9 | 
10 |
11 | ## 浪潮天鹰路侧计算单元典型应用场景有哪些?
12 |
13 | 浪潮天鹰路侧计算单元提供的是一种边缘模式计算服务,其边云计算架构,与中心云计算资源协同配合,是中心云计算能力的补充和优化。它专注于视频感知,具备丰富的目标检测、属性提取和事件检测等感知能力,面向智慧高速多门类通用感知需求,提供时延相对较低、精度更高的感知数据服务,通过实时视频的获取,进行停车、拥堵、违章变道等相关事件检测分析,输出车流量、平均速度、时间占有率、空间占有率、车头间距、车头时距、排队长度等交通参数,实现基于数字孪生能力的超视距导航,在自动驾驶、车路协同和车联网等应用场景中发挥着重要作用,广泛应用于高速公路、高架桥、隧道、大桥等场景的交通智能化管理。目前,浪潮天鹰路侧计算单元在四川、山东、湖南等省份已落地应用。
14 |
15 | 
16 |
17 | 
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/2021版团标体系系列解读-搭建智能感知标准子体系,助力融合感知与定位系统开发.md:
--------------------------------------------------------------------------------
1 | - [2021版团标体系系列解读 | 搭建智能感知标准子体系,助力融合感知与定位系统开发](https://mp.weixin.qq.com/s/wHLJ20qauZlKSYFjOYj3cA)
2 |
3 | ## 1. 研究背景
4 |
5 | 智能感知模块是整个智能网联汽车自动驾驶系统的最前端和输入,可对周围环境包括其他交通参与者在内的信息在数字世界中进行重建,是实现自动驾驶的基础和前提。近年,国内智能网联汽车传感器供应商如雨后春笋般涌现,部分供应商技术实力达到了世界一流水平,但真正实现大规模量产配套并经过实践检验的传感器上车方案仍然较少,国内部分自动驾驶车型传感器方案如表1所示。
6 |
7 | 表1 国内部分自动驾驶车型传感器方案
8 |
9 | 
10 |
11 | 目前,各国自动驾驶相关标准法规,多数聚焦在功能层面的要求和指标,缺乏传感器技术规范及测试验证相关标准,亟需制定相关标准,提供一套完备的传感器技术要求及测试方法,加速智能传感器的产业化落地,助力融合感知与定位系统开发。
12 |
13 | ## 2. 团标子体系
14 |
15 | 中国智能网联汽车产业创新联盟(以下简称联盟)智能传感器工作组提出的智能传感器团标体系面向不同等级自动驾驶功能的正向开发和测试验证需求,从车载端感知系统和路侧端感知系统两个方面的应用场景出发,面向激光雷达、毫米波雷达、摄像头、组合惯导系统、C-V2X车载终端以及融合感知与定位系统等六种传感器零部件或系统,开展产品技术标准、数据标注规范、传感器模型构建、协同感知要求、硬件测评要求、感知测评方法等6个方面的标准研制工作。
16 |
17 | 
18 |
19 | 图1 智能传感器相关标准研究框架
20 |
21 | 智能传感器团标体系从智能传感器的性能要求及测试评价方法出发,服务自动驾驶功能的正向开发和测试验证,促进智能传感器技术进步和产业化落地。目前视觉感知测评、激光雷达感知测评、融合感知系统设计等相关标准正在研制,角向毫米波雷达测评、融合定位系统技术要求等标准开展预研工作。
22 |
23 | 表2 智能传感器团体标准研制进展
24 |
25 | 
26 |
27 | ## 3. 组织实施
28 |
29 | 联盟智能传感器工作组首批发起成员包括主机厂、零部件供应商、第三方检测机构、科研院所等36家单位,划分为视觉、激光雷达、毫米波雷达、融合、定位、应用和测试7个分组。
30 |
31 | 
32 |
33 | 图2 智能传感器工作组架构
34 |
35 | 智能传感器工作组致力于开展车载和边缘云智能传感器相关技术规范及测试验证流程标准化的研究,凝聚行业力量推动国内车载和边缘云智能传感器的产业化进程。以标准牵引能力建设为思路,联盟智能传感器工作组将联合行业开展如下工作:
36 |
37 | (1)梳理智能感知领域标准体系,解决技术要求/标准不统一的问题及产业共性的标准化需求,提升产品质量和一致性,全面促进产业健康发展;
38 |
39 | (2)解决中国标准ICV感知数据集欠缺的问题,分析不同等级自动驾驶功能的感知需求,开展中国道路工况图像、点云等传感器数据采集、标注与分享应用等工作;
40 |
41 | (3)针对不同类型传感器和融合感知系统,设计支持智能网联汽车整车正向开发与试验验证的测试评价体系,联合开展SIL、HIL、VIL、DIL和实际道路的感知测试评价;
42 |
43 | (4)开展硬件集成与示范,依托示范应用项目,充分发挥示范引导作用,加大标准与应用的衔接;
44 |
45 | (5)开展共性技术课题研究,采用众筹的模式,探索建立“需求导向、共同投入、成果共享”的合作机制。
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/3. 摄像头相关资料/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/1.1.1 车路协同感知设备/3. 摄像头/3. 摄像头相关资料/.keep
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/团雾检测.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 团雾检测算法商品,基于图像处理技术对监测场景进行分析判断,首先根据车道线位置抠取需要分析的区域,对其进行边缘检测记录其检测的距离以及对车辆进行跟踪计算距离,综合以上距离,取其最小距离作为团雾最远可见距离的分析,同时通过对场景区域中的暗通道以及亮度计算其雾值,根据雾值范围得到团雾的浓度,对团雾进行预警,减少道路交通事故的发生,以确保路面行车安全,为道路畅通提供技术支持和保障。
4 |
5 | 注:
6 |
7 | 团雾事件:是受[局部地区](https://baike.baidu.com/item/局部地区/1188094)微气候环境的影响,在大雾中数十米到上百米的局部范围内,出现的更“浓”、[能见度](https://baike.baidu.com/item/能见度/7640331)更低的雾。团雾外视线良好,团雾内一片朦胧。团雾区域性强、预测预报难,尤其是在高速公路上,团雾会导致能见度的突然变化,对高速公路交通安全极具危害性,容易酿成重大[交通事故](https://baike.baidu.com/item/交通事故)。
8 |
9 | | 业务名称 | 业务说明 |
10 | | -------- | ------------------------------------------------------------ |
11 | | 团雾检测 | 应用于高速公路场景,通过视频图像分析方式,对视频画面的能见度进行自动检测识别,实时监测交通道路上团雾的浓度与可见距离,提前预警,可提醒后方来车,前方发生团雾,减少交通事故 |
12 |
13 | ## 2 技术指标
14 |
15 | | 类别 | 检测率 | 漏检率 | 误检率 | 场景使用条件 |
16 | | -------- | ------ | ------ | ------ | ------------------------------------------------------------ |
17 | | 团雾检测 | ≥90% | ≤2% | ≤5% | 1、 光照大于2000lux2、 目标检测距离<100米3、 团雾中车辆在视频画面中的像素不小于64*64像素 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/抛洒物检测算法要求.md:
--------------------------------------------------------------------------------
1 | ## 1 业务类型
2 |
3 | | 业务名称 | 业务说明 |
4 | | ---------- | ------------------------------------------------------------ |
5 | | 抛洒物检测 | 对视频画面中出现的体积不大于60cm*60cm*60cm的物体进行自动检测 |
6 | | 平台对接 | 支ivms3800平台对接 |
7 |
8 | 适用于城市道路、高速公路、园区道路。
9 |
10 | ## 2 技术指标
11 |
12 | | 类别 | 检测率 | 漏检率 | 误检率 | 场景使用条件 |
13 | | ---------- | ------ | ------ | ------ | ------------------------------------------------------------ |
14 | | 抛洒物检测 | ≥90% | ≤2% | ≤5% | 1、 光照大于2000lux2、 目标检测距离<100米3、 抛洒物体积不大于60*60*60cm4、 抛洒物在视频画面中的像素不小于30*30像素 |
15 |
16 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/能见度检测.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 能见度检测摄像机应用于高速公路、城市快速路等公路通行场景,特别是易发团雾的路段,通过视频检测危害道路安全的气象天气。能见度检测算法结合图像暗通道模型和深度学习算法,估算出当前场景的大气透射率,进而推算出当前场景的能见度。
4 |
5 | 能见度检测摄像机按能见度值划分为5个等级:
6 |
7 | 能见度0—50米:4级。
8 |
9 | 能见度50—100米:3级。
10 |
11 | 能见度100—200米:2级。
12 |
13 | 能见度200—500米:1级。
14 |
15 | 能见度500—正无穷:0级。
16 |
17 | 一般报警等级设置为2级及以上,可以根据业主要求设置。
18 |
19 | ## 2 技术指标
20 |
21 | | 规格指标 | 准确率 |
22 | | -------- | ---------- |
23 | | 指标 | 白天:≥96% |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/视频分析服务器.md:
--------------------------------------------------------------------------------
1 | 主要实现视频流(包括实时视频流或录像视频流)的智能分析处理,完成视频数据的结构化提取。
2 |
3 | 通过分析流媒体服务器转发的视频流,对视频数据作结构化处理,结构化后的目标图片和结构化文本信息存储在本机应用单元模块中。
4 |
5 | 通过自带的浏览器界面,可实现车辆及活动目标的快速检索应用。
6 |
7 | ## 1 车辆基础信息识别
8 |
9 | 车辆信息的结构化分析包括车牌识别、车身颜色、车辆类型等。
10 |
11 | 可识别的车牌号码字符包括:“0~9”十个阿拉伯数字,“A~Z”二十六个英文字母;省市区汉字简称(京、津、冀、蒙、辽、吉、黑、沪、桂、浙、皖、闽、赣、桂、豫、鄂、湘、粤、桂、琼、川、贵、云、藏、陕、甘、青、宁、新、晋、苏、鲁、渝);
12 |
13 | 可识别的车身颜色包括:能够识别 11 种车身颜色,白色、灰色、黑色、红色、紫色、蓝色、黄色、绿色、青色、棕色、粉红色。还可以识别车身颜色的深色和浅色。
14 |
15 | 可识别的车型包括:能够识别 7 种常见车型,包括客车,大货车,轿车,面包车,小货车,SUV,中型客车。
16 |
17 | ## 2 车辆品牌与子品牌识别
18 |
19 | 可识别 100 多种车辆的品牌,包括:奔驰、宝马、大众、别克、丰田、本田、依维柯、金杯、福特、现代、马自达、奇瑞、奥迪、雪铁龙、雪弗兰、标致、东风、五菱、尼桑、起亚、皇冠、东南、比亚迪等。
20 |
21 | 可识别 2000 多种车辆子品牌,包括:奥迪 A6L、奥迪 Q3、奥迪 Q5、阿斯顿马丁 DB9、阿斯顿马丁 DBS、保时捷 911、别克 GL8、君威、君越、奔腾 B50、奔腾 B70、本田歌诗图、本田锋范、标致 307、标致 308 等,其涉及范围包括当前已停售,或刚上市热销的各种细分车型。
22 |
23 | ### 2.1 危险品车辆检测
24 |
25 | 通过危险品车辆的特征检测可实现危险品车辆的识别,能为危险品车辆的专项整治和管理提供基础功能保障。
26 |
27 | ### 2.2 车辆信息结构化
28 |
29 | 能够对监控视频中的车辆信息进行结构化提取,车辆结构化信息包括车牌号码、车身主体颜色、车型、车辆品牌(大众、福特、丰田等)、车辆子品牌(桑塔纳、福克斯、凯美瑞等)、行径方向等。通过自带的浏览器查询界面,能够实现车辆的快速查询。此外,在查询车辆信息时,可同时设置多种筛选条件,提高查询的效率和准确度。前端摄像机需满足一定的视角要求,例如车牌的横向宽度大于 80 个像素,人眼能分辨车牌号码,车辆运行方向与垂直角度的夹角小于 20°。
30 |
31 | ### 2.3 活动目标的特征提取
32 |
33 | 能够对监控视频中的行人、车辆等活动目标进行特征识别和提取,特征信息主要包括活动目标类型(如人、车)、运动方向(如向上、向左等)、主体颜色等。通过自带的浏览器查询界面,能够实现活动目标的快速查询。在查询活动目标信息时,可同时设置筛选多种条件,极大地提高查询的效率,快速准确地找到关键目标,目标检测可同时追踪多个目标。
34 |
35 |
36 |
37 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/货车异常行驶检测.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 随着经济社会快速发展,公路里程不断增长和路网密度的加大,非法超限超载货运车辆毁损公路现象屡治不绝,一些超载货车常常通过异常行驶行为(如跨道行驶、走走停停、走S形等)干扰治超动态称重系统、躲避处罚,货车异常行驶检测算法就是针对这类应用需求而开发,借助科技手段破解超限治理难题。
4 |
5 | 货车异常行驶检测算法运用深度学习算法对场景中所有出现的车辆进行车型检测和准确的检测与跟踪,勾勒出其运动线路,当检测到车辆类型为货车且具有异常行驶线路时进行事件抓拍,当前支持的异常行驶行为检测类型为跨道行驶,包括压线和变道行驶。
6 |
7 | 为了准确检测车辆的车型,货车异常行驶检测摄像机监管车头方向。
8 |
9 | 货车异常行驶检测摄像机除了应用在公路治超系统,也可以应用在其他对货车异常行驶行为具有检测要求的场景。
10 |
11 | | 摄像机类型 | 支持型号 | 所属版本 | 最大分辨率 | 最大监测车道数 | 主要功能 |
12 | | ---------- | -------- | -------- | ---------- | -------------- | -------------------------------- |
13 | | | | | 900万像素 | 3车道 | 1卡口2跨道行驶(包括压线和变道) |
14 |
15 | ## 2 技术指标
16 |
17 | 针对该算法,当前规格指标情况如下,针对车辆检测及车牌检测:
18 |
19 | | 类别 | 捕获率 | 检测准确率 | 场景使用条件 |
20 | | -------- | ------ | ---------- | ------------------------------------------------------------ |
21 | | 车辆检测 | ≥99% | ≥98% | 1、 车牌像素水平方向不小于120像素点;2、 车牌清晰度达到人工可分辨;3、 车牌倾斜角度小于5度 |
22 |
23 | 针对该算法,标准场景下针对货车异常行驶检测的的指标如下:
24 |
25 | | 货车异常行驶检测功能 | 指标(标准场景下) | |
26 | | -------------------- | --------------------- | --------------------- |
27 | | 捕获率 | 准确率 | |
28 | | 货车跨道行驶 | 白天:≥95% 夜间:≥92% | 白天:≥90% 夜间:≥90% |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/车头AI特征.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 车头AI特征识别摄像机应用于地面道路、城市快速路、高速公路等各种道路,抓拍车头方向,采用深度学习算法,对场景中所有出现的车辆进行准确的检测后,运用基于深度学习的小目标检测算法检测车头的各类特征,具备车牌号码、车牌颜色、车身颜色、车辆品牌等车辆基本特征检测功能。
4 |
5 | | 摄像机类型 | 支持型号 | 所属版本 | 最大分辨率 | 最大监测车道数 | 主要功能 |
6 | | ---------- | -------- | -------- | ---------- | -------------- | ------------------------------------------------------------ |
7 | | 摄像机 | | | 900万像素 | 3车道 | 1卡口(车头)2遮阳板检测3细分车型检测4纸巾盒检测5挂饰检测6天窗检测7后视镜检测8前车灯检测9前雾灯检测 |
8 |
9 | ## 2 技术指标
10 |
11 | 针对该算法,当前规格指标情况如下,针对车辆检测及车牌检测:
12 |
13 | | 类别 | 捕获率 | 检测准确率 | 场景使用条件 |
14 | | -------- | ------ | ---------- | ------------------------------------------------------------ |
15 | | 号牌检测 | ≥99% | ≥98% | 1、 车牌像素水平方向不小于120像素点;2、 车牌倾斜角度小于5度3、 图像特征部分清晰度达到人工可分辨 |
16 |
17 | 针对该算法,各种AI特征检测精度在标准场景下的指标如下:
18 |
19 | | 检测功能 | 检测准确率(标准场景下) |
20 | | -------- | ------------------------ |
21 | | 遮阳板 | 白天:≥95% 夜间:≥90% |
22 | | 细分车型 | 白天:≥90% 夜间:≥80% |
23 | | 纸巾盒 | 白天:≥80% 夜间:≥70% |
24 | | 挂饰 | 白天:≥85% 夜间:≥75% |
25 | | 天窗 | 白天:≥95% 夜间:≥90% |
26 | | 后视镜 | 白天:≥95% 夜间:≥90% |
27 | | 前车灯 | 白天:≥95% 夜间:≥90% |
28 | | 前雾灯 | 白天:≥95% 夜间:≥90% |
29 |
30 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/车头卡口基础特征.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 车头卡口基础特征识别摄像机应用于地面道路、城市快速路、高速公路等各种道路,抓拍车头方向,在NNIE模块强大算力的支持下,采用各类深度学习算法,实现车辆的检测、号牌检测与检测、车身颜色检测、车辆类型与品牌的检测等功能.。
4 |
5 | | 摄像机类型 | 支持型号 | 所属版本 | 最大分辨率 | 最大监测车道数 | 主要功能 |
6 | | ---------- | -------- | -------- | ---------- | -------------- | ------------------------------------------------------------ |
7 | | 摄像机 | | | 900万像素 | 3车道 | 1车辆检测抓拍2车牌号码检测3车牌颜色检测4车身颜色检测5车辆品牌检测 |
8 |
9 | ## 2 技术指标
10 |
11 | | 类别 | 捕获率 | 检测准确率 | 场景使用条件 |
12 | | ------------ | ------ | --------------------- | ------------------------------------------------------------ |
13 | | 号牌检测 | ≥99% | ≥98% | 1、 车牌像素水平方向不小于120像素点;2、 车牌倾斜角度小于5度3、 图像特征部分清晰度达到人工可分辨 |
14 | | 车身颜色检测 | | 白天:≥85% 夜间:≥70% | 同上 |
15 | | 车辆品牌检测 | | 白天:≥90% 夜间:≥85% | 同上 |
16 |
17 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/车辆统计.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 利用AI视频分析技术,通过检测场景中的车辆,从而计算车辆数量,包含车流量统计和区域车辆计数两个场景算法。车流量统计指统计车辆进入和离开区域(通道)两个方向的流量数据;区域车辆计数统计当前场景中指定区域的瞬时车辆数量。区域数量统计中又包含数量超标、数量不足两个功能,当区域内车辆数量超标或不足时,产生报警。
4 |
5 | | 摄像机类型 | 支持型号 | 所属版本 | 功能特性 | 适用场景 |
6 | | ---------- | -------- | -------- | ---------------------------------------- | ------------------------------------------------------------ |
7 | | 摄像机 | | | 车流量统计区域内车辆计数数量超标数量不足 | 车流量统计可统计经过道路或出入口的车辆数量,可应用于交通流量统计、园区单位的出入口等;区域车辆计数可实时检测指定区域内当前的瞬时车辆数量,可用于各类停车场停车的数量统计,实时展示空车位数量。 |
8 |
9 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/4. 算法要求/逆行检测.md:
--------------------------------------------------------------------------------
1 | ## 1 功能简介
2 |
3 | 逆行检测算法商品,通过样本训练,获取车辆模型。通过对视频画面中的运动目标进行检测,过滤出符合车辆模型的运动目标,并进行运动轨迹跟踪,判断出目标车辆的行驶方向。通过与所设置的车道的车道方向进行比对,判断是否是逆行行为,并触发图片抓,以确保路面行车安全,为道路畅通提供技术支持和保障。
4 |
5 | 注:
6 |
7 | 逆行事件:车辆在道路上的行驶方向与规定方向相反,且行驶距离不小于某一设定值的交通事件。
8 |
9 | | 业务名称 | 业务说明 |
10 | | -------- | ------------------------------------------------------------ |
11 | | 逆行检测 | 对行驶车辆进行车辆检测和方向判断,若车辆行进轨迹与车道所规定的行进方向相反,则判断为逆行,并上报逆行事件 |
12 |
13 | ## 2 技术指标
14 |
15 | | 类别 | 检测率 | 漏检率 | 误检率 | 场景使用条件 |
16 | | -------- | ------ | ------ | ------ | ------------------------------------------------------------ |
17 | | 逆行检测 | ≥90% | ≤2% | ≤5% | 1、 光照大于2000lux2、 目标检测距离<100米3、 逆行车辆在视频画面中的像素不小于64*64像素 |
18 |
19 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/全国高速公路视频云联网省级云平台方案.md:
--------------------------------------------------------------------------------
1 | - [全国高速公路视频云联网省级云平台方案](https://wenku.baidu.com/view/080c78ffe418964bcf84b9d528ea81c759f52ef1.html?rec_flag=default&fr=Recommend_RelativeRecommend-60272,60321,40251,40300,40356-pc_view_otherlike_new-19e3374e0875f46527d3240c844769eae109a348)
2 |
3 | # 一、技术要求
4 |
5 | 1.省级云平台应接入高速公路全部监控摄像机(收费站车道、收费亭监控设施除外)并进行数字化改造,满足省级云平台开通互联网专线宽带,不少于上下行速率对称的300M/1000路,且具有10个及以上独立公网。
6 |
7 | 3.省级云平台向部级云平台传输的视频资源采用标准H264编码,视频传输支持RTMP、HTP-FLV、HLS三种协议,视频播放无需插件,传输到部级云平台的视频码流加密传输。
8 |
9 | 4.省级云平台支持SsL加密,使视频流在被调看的传输过程中进行加密
10 |
11 | 5.省级云平台向部级云平台提供**本省域内全部摄像机的设备、点位、在线状态等信息**。信息发生变更时自动同步更新至部级云平台。
12 |
13 | 6.**视频资源编号命名、字符叠加及时钟**同步规则应符合《交通运输部办公厅关于做好部省视频监测系统(客户端)整改升级工作的通知》(交办公路函(2019)676号)要求。
14 |
15 | 7.省级云平台应向部级云平台提供全部视频资源的播放地址,且播放地址必须带有鉴权信息,保证视频流的访问控制安全。
16 |
17 | 8.省级云平台充分利用公有云CDN技术,**达到千万级并发能力,保证部级云平台能够同时获得全部摄像机的视频流数据。**
18 |
19 | 9.省级云平台应具备与部级云平台无缝对接能力,使得通过部级云平台具有调看省域范围内32Kpbs低码流(25帧、CF分辨率视频秒级(小于1秒催实时播放能力,部级云平台调用不低于1Mpbs高码流(25帧)视频首屏所耗时间小于4秒。
20 |
21 | 10.省级云平台具备摄像机**云台控制**能力,并向部级云平台提供云台控制服务。
22 |
23 | 11.省级云平台具备提供高速公路**沿线视频监控**设备资源**每隔5分钟截图**及査询调阅截图能力,并向部级云平台提供服务。截图要求CF及以上的分辨率的PG文件,每次截图保留时间不少于7天。
24 |
25 | 12.省级云平台具备**智能分析应用服务**,能够根据摄像机视频对**拥堵事件、交通事件、平均速度、公路流量公路气象**等开展监测分析,并将分析的结构化数据上传至部级云平台;或路段分中心向省级云平台提供上述智能分析结果,由省级云平台将结构化数据上传至部级云平台。
26 |
27 | 13.省级云平台应具备**摄像机图像质量检测服务,**并将检测结果上报至部级云平台;或路段分中心向省级云平习台提供摄像机图像质量检测结果,省级云平台将检测结果上报至部级云平台。
28 |
29 |
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/感动科技-视频网联云控平台.md:
--------------------------------------------------------------------------------
1 | # 视频云联网功能架构
2 |
3 | ## 1.视频云端调看
4 |
5 | - 基于地图的视频应用
6 | - 基于互联网地图,以图层的方式,将全省基础地理信息、国省道、水路及其他交通图层、视频监控点等多种交通要素和视频资源叠加绘制在地图上,交通管理者在任何时候、任何地点都能在地图上调取现场视频图像。
7 |
8 | - 基于组织的视频应用
9 | - 单画面及多画面视频
10 | - 高清视频点播
11 | - 标清视频秒播
12 | - 巡检预案与轮播
13 | - 提供对管辖的视频设备巡检预案的模板代管理功能,可配置巡检的视频设备、单次视频显示屏数、切换的时间间隔等参数,平台依据用户制定的巡检模板自动进行视频轮训播放,以供管理员按需分批查看视频及视频现场情况。
14 | - 云台控制
15 | - PC端云台控制能实现云台全方位(分别为上、下、左、右、左上、左下、右上、右下)移动及镜头变倍、变焦控制,支持主流云台控制协议。
16 | - 移动端针对全景视频支持采用手机陀螺仪、手指操控及鼠标点控的方式实现模拟电动云台,保证显示视频区域的方向跳蚤、图像缩放等功能。
17 | - 移动视频
18 |
19 | ## 2. 视频云端储存
20 |
21 | - 存量视频按需存储
22 | - 增量视频高清存储
23 | - 视频录像
24 | - 视频录像回放
25 |
26 | 通过移动端,各级领导能够实时调取高速公路、干线公路、航道、运管等交通行业现场视频图像,便于及时了解交通运行态势。
27 |
28 | 同时,系统与交通事件信息对接,动态向领导推送主题视频。
29 |
30 | ## 3. 监控快照
31 |
32 | 根据部路网中心制定的视频截图技术要求,实现对截图的时间间隔、图片格式、分辨率等参数的详细配置功能。
33 |
34 | 视频监控快照将根据配置参数,自动进行符合技术要求的图像截取。
35 |
36 | ## 4. 摄像机健康状态监测及统计
37 |
38 |
39 |
40 | ## 5. 视频分析
41 |
42 | - 团雾检测
43 | - 24小时实时数字化监测预警低能见度与突发团雾事件。
44 | - 停车事件检测
45 | - 对视频监控区域内停靠的车辆进行字段检测并报警。
46 | - 拥堵事件检测
47 | - 自动检测道路上车辆拥堵事件并报警。
48 | - 行人穿越检测
49 | - 对检测在指定的道路区域内是否有行人进入并报警。
50 | - 逆行事件检测
51 | - 对视频监控区域内逆行、倒车行为进行自动检测并报警。
52 | - 交通事故检测
53 | - 对视频监测区域内的机动车及非机动车交通事故自动检测并报警。
54 | - 。。。。。。
55 |
56 | 视频联网云平台具备智能分析服务,能够按照技术要求,根据摄像机视频资源对交通事件等开展监测分析,并将分析后的数据上传至云平台。
57 |
58 |
59 |
60 | ## 6. 后台管理
61 |
62 | - 基础设备管理
63 | - 视频发布管理
64 | - 视频统计
65 | - 用户在线率统计
66 |
67 | # 功能丰富
68 |
69 | 面向管理者、工作人员以及社会公众,提供PC端、微信端的视频云服务:
70 |
71 | - 支持基于地图的摄像机定位及展现。
72 | - 支持标清、高清视频的切换与视频秒级查看。
73 | - 支持视频监控快照及管理。
74 | - 支持视频录像存储与回放功能。
75 | - 支持视频专题的建立以及与事件的关联推送。
76 | - 支持设备健康状态检测、视频质量监测与统计。
77 | - 为基于视频分析的应用提供视频资源。
78 |
79 | 
80 |
81 | 
82 |
83 | 
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/3. 摄像头/智慧交通视频分析云平台建设方案.md:
--------------------------------------------------------------------------------
1 | - [智慧交通视频分析云平台建设方案](https://wenku.baidu.com/view/55b3a67d2379168884868762caaedd3383c4b59e.html)
2 |
3 | 
4 |
5 | # 系统特性
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/5.路侧计算单元/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/1.1.1 车路协同感知设备/5.路侧计算单元/.keep
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/5.路侧计算单元/浪潮天鹰路侧计算单元.md:
--------------------------------------------------------------------------------
1 | - [浪潮天鹰路侧计算单元](https://www.inspur.com/lcjtww/445068/445237/2598676/index.html)
2 |
3 | ## 什么是浪潮天鹰路侧计算单元?
4 |
5 | 浪潮天鹰路侧计算单元是车路协同场景中路侧基础设施的设备核心组件,也是路侧感知系统的大脑,主要用于边缘感知和融合计算。它通过视联网、人工智能、边缘计算等技术,基于全量、连续环境的信息,准确识别路网交通状态、事件、车辆等,并进行数据采集,同时通过对采集的数据进行融合、处理和分发,实现对自动驾驶车辆、V2X网联车的安全辅助与效率引导支持,助力高速公路智慧化、数字化交通感知和管理水平的双提升。
6 |
7 | 
8 |
9 | 浪潮天鹰路侧计算单元提供的是一种边缘模式计算服务,其边云计算架构,与中心云计算资源协同配合,是中心云计算能力的补充和优化。
10 |
11 | 它专注于视频感知,具备丰富的目标检测、属性提取和事件检测等感知能力,面向智慧高速多门类通用感知需求,提供时延相对较低、精度更高的感知数据服务,通过实时视频的获取,进行停车、拥堵、违章变道等相关事件检测分析,输出车流量、平均速度、时间占有率、空间占有率、车头间距、车头时距、排队长度等交通参数,实现基于数字孪生能力的超视距导航,在自动驾驶、车路协同和车联网等应用场景中发挥着重要作用,广泛应用于高速公路、高架桥、隧道、大桥等场景的交通智能化管理。
12 |
13 | 目前,浪潮天鹰路侧计算单元在四川、山东、湖南等省份已落地应用。
14 |
15 | 
16 |
17 | 
18 |
19 | 浪潮天鹰路侧计算单元
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/6.路侧融合感知/智能网联路侧感知计算协同软件.md:
--------------------------------------------------------------------------------
1 | - [智能网联路侧感知计算协同软件](http://www.ccgp.gov.cn/cggg/dfgg/dylygg/202111/t20211110_17161981.htm)
2 |
3 | 北京理工大学重庆创新中心智能网联路侧感知计算协同软件单一来源采购公示
4 |
5 | 项目名称:智能网联路侧感知计算协同软件
6 |
7 | 拟采购的货物或者服务的说明:
8 |
9 | 车路协同项目研发的多款不同探测距离的毫米波交通雷达已开始在高速、城市路口进行安装测试,但当前存在雷达与视频融合效果差、全路段车辆跟踪不唯一,无法基于二维、三维等数字孪生系统直观观察交通场景信息及流量统计信息等问题,导致在车路协同应用上项目的效果无法展示,不能有效评估车路协同研究的成效,制约了平台车路协同领域的项目研制进度,阻碍了项目的实际应用落地。
10 |
11 | 拟采购的货物或服务的预算金额:50.0000000 万元(人民币)
12 |
13 | 采用单一来源采购方式的原因及说明:
14 |
15 | 智能网联路侧感知计算协同软件能够将光学/雷达传感器融合,利用先进的数据融合方法将交通雷达、电子警察以及视频监控设备所获取的信息进行融合处理;实现实时定位车辆所在位置,捕获车辆实时速度,完整描述车辆行驶轨迹,保证全路段ID唯一;基于GIS、三维模块等信息展示路口、路段的车流量、排队长度、违法事件等信息并对所有设备的状态进行实时查看并进行管理的功能。该软件可有效弥补当前平台相关软件技术的不足,协助分析车路协同中出现的问题,定量评估车路协同系统性能,实时监测全路段设备状态,通过图像直观展示纯数字的信息,提升项目效率,加速项目由试验、研究向实际应用的转化进度。因此智能网联路侧感知计算协同软件是车路协同研究必不可少的工具及平台软件。
16 |
17 | 在软件供应商选择上,因涉及道路交通数据安全且国外软件维护成本高、响应不及时,未考虑国外供应商。当前国内在车路协同软件上开发应用较多的主要有三家厂商分别是:重庆梅安森科技股份有限公司、北京五一视界数字孪生科技股份有限公司、连云港杰瑞电子有限公司。经调研,重庆梅安森提供的计算协同软件的底图有高精度地图、遥感地图、矢量地图模式,在场景展示上支持二维、三维场景切换,支持雷达协议解析,支持雷视协同,支持事件检测预警和统计数据展示等主要功能,能够满足需求。五一视界提供的计算协同软件底图只支持高精度地图方式,展示方式上仅有三维场景,不支持雷视协同和事件检测预警,无法满足使用要求。杰瑞电子提供的计算协同软件在底图上只支持高精度地图模式,在展示方式上目前只支持二维场景展示,不支持雷视协同和事件检测预警,不能够满足应用要求。
18 |
19 | 除此之外,重庆梅安森科技股份有限公司的智能网联路侧感知计算协同软件基于云计算、大数据、物联网、二三维GIS、人工智能、在线协同设计等先进技术构建,能够有效解决雷达等设备组网、数据分析的需求,同时具备平台接入设备感知、计算、决策控制的功能;此外该平台兼容性强,支持电脑、平板、手机等硬件设备,兼容Sqlserver、Mysql、Oracle等多种类型数据库,支持主流的浏览器实现web端访问,支持Windows、Mac os X、Linux系统,支持sql、java、C/C++/C#等多种语言开发,方便维护;其典型应用的数字门户技术,方便集成数据信息管理、系统配置管理、系统参数设置、系统权限管理、日志信息管理、数据库管理、导入导出配置等功能;其二、三维协同设计能够实现二、三维图形的可视化和展现功能,通过组件的搭配和数据设置,提供完整的基于HTML5图形界面组件库,通过丰福的图元和底图组件构建出可视化的大数据页面。主要包括图元管理、底图管理、场景管理和数据源接入管理,并可绑定实时数据源信息,实现实时数据在二、三维场景中的实时展示和视频实时播放,满足在智慧交通行业的二、三维GIS应用。
20 |
21 | 综上,重庆梅安森科技股份有限公司的智能网联路侧感知计算协同软件是符合北京理工大学重庆创新中心车路协同系统使用的最佳软件。
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/6.路侧融合感知/路侧智慧交通控制 为数字交通新型融合基础设施网络提供强力支撑.md:
--------------------------------------------------------------------------------
1 | - [路侧智慧交通控制 为数字交通新型融合基础设施网络提供强力支撑](http://www.itarge.com/newsshow.php?cid=46&id=338)
2 |
3 | 随着数字经济的蓬勃发展,各行业加速进入产业数字化阶段。2021年10月25日交通运输部发布《数字交通“十四五”发展规划》,明确了未来五年我国数字交通发展目标,开启交通行业数字化高质量发展新篇章。**北京英泰智科技股份有限公司**十多年来深耕智慧交通行业,依托AI、大数据、边缘计算等技术及专业的交通控制理论和实践,**自主研发了集数据融合、交通信号控制、交通数据识别分析、网联通信、数据交互于一体的路侧智慧交通控制解决方案**。
4 |
5 | **北京英泰智路侧智慧交通控制解决方案**以自主核心知识产权的算法、智能软硬件产品、数据分析和管理平台、“云+边+端”协同的架构体系为基础,**对路口交通采集设备全域覆盖管理,实现各类采集数据的融合、实时分析,输出多种交通数据**。目前可接入的数据包括视频、线圈、雷达、信号、互联网等,经过路侧交通控制终端融合处理后**,支持信号优化、特勤车辆保障、隐患分析、智能预判、车路协同、设备运维等多种“智慧交管”的业务场景**。
6 |
7 | 
8 |
9 |
10 | ▲ 交通数据采集
11 |
12 | **01. 感知接入**
13 |
14 | **■硬件接口**:提供丰富的接口,包括网口、I/O口、串口等,可对接视频、雷达、地磁、线圈等各类感知设备;同时具备C-V2X能力,满足未来交通需求。
15 |
16 | **■数据交互**:具备与感知设备、路侧交通控制终端、中心信号系统的数据交互能力,交互协议支持国家标准、行业标准以及自定义模式。
17 |
18 | **02. 融合计算**
19 |
20 | **■汇聚交互**:通过汇聚算法,对多维感知数据实现低延时汇聚整合,提供高性能汇聚接口。
21 |
22 | **■数据融合**:基于业务逻辑建立融合模型,对边、端等交通数据实时融合计算,实现信息的有效提取,为决策提供有力支撑。
23 |
24 | **03. 场景识别**
25 |
26 | **■核心算法**:提供多种算法模型,包括视频检测、3D点云、事件判断等算法,结合融合后的有效数据,实现对多维数据及场景的识别。
27 |
28 | **■识别能力**:支持交通元素(包括机动车、非机动车、行人的数量、特征、行为等)、交通指标(包括交通流量、车辆速度、道路占有率、排队长度等)、交通事件(包括溢流、失衡、死锁、事故、路侧停车、施工、特勤保障、公交优先等)的识别,为隐患分析,智能预判等提供依据。
29 |
30 | **04. 交通决策**
31 |
32 | **■信号控制**:基于实时数据、信号配时等信息,根据交通状况动态调整信号策略,实现秒级信号自适应优化;结合绿波通行、区域协调等方式,完成区域内全方位控制,提升整体信号控制效果。
33 |
34 | **■优化流程**:通过“生成决策-适时执行-效果诊断-持续优化”的闭环流程,不断完善信号优化的效果。
35 |
36 | **05. 智慧运维**
37 |
38 | **■运维服务:**具备对感知设备自动化和智能化的运维能力,如实时发现故障、智能诊断原因等;显著提升运维效率。
39 |
40 | **■快捷实施:**项目实施可操作性强,易推广可复制。
41 |
42 | 
43 |
44 |
45 | ▲ 多数据融合
46 |
47 | **北京英泰智通过路侧智慧交通控制解决方案,实现感知接入、融合计算、场景识别、交通决策和智慧运维。**围绕数字交通“十四五”发展目标,促进数字交通与数字经济的深度融合发展,**为构建交通新型融合基础设施网络提供强力支撑,**推动交通行业高质量发展和交通强国建设。
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/7.雷视融合/多传感器融合技术(基本概念、前融合和后融合的区别).md:
--------------------------------------------------------------------------------
1 | - [多传感器融合技术(基本概念、前融合和后融合的区别)](https://www.cnblogs.com/klcf0220/p/11347183.html)
2 |
3 | 多传感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用计算机技术将来自多传感器或多源的信息和数据,在一定的准则下加以自动分析和综合,以完成所需要的决策和估计而进行的信息处理过程。
4 |
5 | ## 1、多传感器融合几个概念
6 |
7 | 硬件同步、硬同步:使用同一种硬件同时发布触发采集命令,实现各传感器采集、测量的时间同步。做到同一时刻采集相同的信息。
8 |
9 | 软件同步:时间同步、空间同步。
10 |
11 | 时间同步、时间戳同步、软同步:通过统一的主机给各个传感器提供基准时间,各传感器根据已经校准后的各自时间为各自独立采集的数据加上时间戳信息,可以做到所有传感器时间戳同步,但由于各个传感器各自采集周期相互独立,无法保证同一时刻采集相同的信息。
12 |
13 | 空间同步: 将不同传感器坐标系的测量值转换到同一个坐标系中,其中激光传感器在高速移动的情况下需要考虑当前速度下的帧内位移校准。
14 |
15 | ## 2、基本原理
16 |
17 | 多传感器信息融合技术的基本原理就像人的大脑综合处理信息的过程一样,将各种传感器进行多层次、多空间的信息互补和优化组合处理,最终产生对观测环境的一致性解释。在这个过程中要充分地利用多源数据进行合理支配与使用,而信息融合的最终目标则是基于各传感器获得的分离观测信息,通过对信息多级别、多方面组合导出更多有用信息。这不仅是利用了多个传感器相互协同操作的优势,而且也综合处理了其它信息源的数据来提高整个传感器系统的智能化。
18 |
19 | ## 3、多传感器的前融合与后融合技术
20 |
21 | 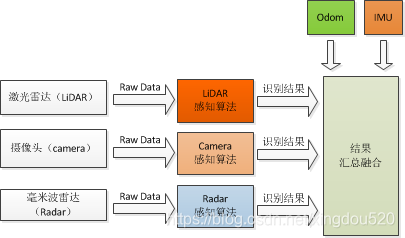
22 |
23 | 图 1.2.2a后融合算法典型结构
24 |
25 | ### 后融合算法:
26 |
27 | 每个传感器各自独立处理生成的目标数据。
28 |
29 | 每个传感器都有自己独立的感知,比如激光雷达有激光雷达的感知,摄像头有摄像头的感知,毫米波雷达也会做出自己的感知。
30 |
31 | 当所有传感器完成目标数据生成后,再由主处理器进行数据融合。
32 |
33 |
34 | 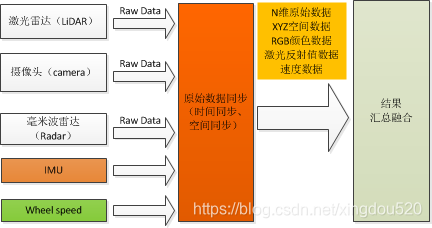
35 |
36 | 图 1.2.2a前融合算法典型结构
37 |
38 | ### 前融合算法:
39 |
40 | 只有一个感知的算法。对融合后的多维综合数据进行感知。
41 |
42 | 在原始层把数据都融合在一起,融合好的数据就好比是一个Super传感器,而且这个传感器不仅有能力可以看到红外线,还有能力可以看到摄像头或者RGB,也有能力看到LiDAR的三维信息,就好比是一双超级眼睛。在这双超级眼睛上面,开发自己的感知算法,最后会输出一个结果层的物体。
43 |
44 | 转载链接:https://blog.csdn.net/xingdou520/article/details/84103987
45 |
46 | 参考链接:https://blog.csdn.net/orange_littlegirl/article/details/89067017
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/7.雷视融合/宇磐科技.md:
--------------------------------------------------------------------------------
1 | - [雷视一体机](http://www.szcostone.com/radar/26.html)
2 |
3 | ## 雷视一体机
4 |
5 | 
6 |
7 | ## 24G车载毫米波雷达
8 |
9 | 
10 |
11 | 
12 |
13 | ## 77G车载毫米波雷达
14 |
15 | 
16 |
17 | ## 360 全景环视雷达预警系统
18 |
19 | 
20 |
21 | ## 疲劳驾驶监测传感器
22 |
23 | 
24 |
25 | ## 前向视觉预警传感器
26 |
27 | 
28 |
29 | ## ADAS融合套件
30 |
31 | 
32 |
33 | ## 车身控制器
34 |
35 | 
36 |
37 | ## 交通行业解决方案
38 |
39 | 
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/7.雷视融合/融合.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 为了达到不同传感器之间的空间同步,车路协同需要使用传感器参数信息进行坐标系转换,其中为方便研究人员使用和数据隐私保护,路端LiDAR相关数据统一旋转到与地面平行的虚拟LiDAR坐标系,世界坐标系统一旋转平移到虚拟世界坐标系。各坐标系之间的关系如下图:
4 |
5 | - 虚拟世界坐标系
6 | 虚拟世界坐标系是以地面某一随机位置为原点,x 轴、y 轴与地面平行,z 轴垂直于地面竖直向上,符合右手坐标系规则。
7 |
8 | - LiDAR坐标系
9 | LiDAR坐标系是以LiDAR传感器的几何中心为原点,x 轴水平向前,y 轴水平向左,z 轴竖直向上,符合右手坐标系规则。
10 |
11 | - 虚拟LiDAR坐标系
12 | 虚拟LiDAR坐标系是以LiDAR传感器的几何中心为原点,x 轴平行地面向前,y 轴平行地面向左,z 轴垂直于地面竖直向上,符合右手坐标系规则。由于路端LiDAR与地面存在俯仰角,为方便研究,通过路端LiDAR外参矩阵,统一将路端LiDAR坐标系转到虚拟LiDAR坐标系,同时将路端点云全部转到虚拟LiDAR坐标系。
13 |
14 | - 相机坐标系
15 | 相机坐标系是以相机光心为原点,x 轴和y 轴与图像平面坐标系的x 轴和y 轴平行,z 轴与相机光轴平行向前、与图像平面垂直。通过相机到LiDAR的外参矩阵,可以将点从相机坐标系转到LiDAR坐标系。
16 |
17 | - 图像坐标系
18 | 图像坐标是以相机主点(即相机光轴与图像平面的交点,一般位于图像平面中心)为原点,x 轴水平向右,y 轴水平向下的二维坐标系。相机内参可以实现从相机坐标到图像坐标的投影。
19 |
20 | - 定位系统
21 | 利用GPS/IMU等定位和惯性系统,可实时获取自动驾驶车辆在全球定位系统的位置以及朝向角。为保护数据安全和研究方便,将真实世界定位系统得到的定位转换到虚拟世界坐标系下。
22 |
23 | E. 时间同步
24 | 时间同步是为实现车路协同针对路端和车端传感器所做的同步操作。利用GPS授时以同步各传感器时间,并在采集每帧数据时得到相应的时间戳。时间戳可通过时间转换得到相应的标准时间。
--------------------------------------------------------------------------------
/1.1.1 车路协同感知设备/设备布设情况.md:
--------------------------------------------------------------------------------
1 | 
--------------------------------------------------------------------------------
/1.2 边缘计算/1. MEC/MEC.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
--------------------------------------------------------------------------------
/1.2 边缘计算/1. MEC/基于5G MEC的车路协同开源平台实践和标准.md:
--------------------------------------------------------------------------------
1 | - [基于5G MEC的车路协同开源平台实践和标准](https://www.doc88.com/p-99999069114363.html?r=1)
2 |
3 | # 基于5G MEC的车路协同开源平台实践和标准
4 |
5 | 演讲人:俞一帆 腾讯未来网络实验室专家
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
--------------------------------------------------------------------------------
/1.2 边缘计算/1. MEC/路侧MEC软件架构说明.md:
--------------------------------------------------------------------------------
1 | # 基本开发环境
2 |
3 | ## 软件
4 |
5 | ### MEC设备环境
6 |
7 | 1. Ubuntu Server 16.04.7 LTS
8 | 2. GCC工具链 8.4.0
9 | 3. DBG
10 | 4. OpenSSH
11 |
12 | ### Windows开发机环境
13 |
14 | 仅作推荐,不做强制要求:
15 |
16 | 1. Visual Studio 2019 (必须功能:C++ CMake tools for Windows,增加功能请用Visual Studio Installer修改安装)
17 |
18 | 使用Visual Studio 2019进行远程开发的具体操作过程见[这里](https://docs.microsoft.com/zh-cn/cpp/build/cmake-projects-in-visual-studio?view=msvc-160)。
19 |
20 | ## 硬件
21 |
22 | ### 实验室开发板
23 |
24 | 本软件基于研扬Up Xtreme开发板进行开发,搭载CPU型号为i7-8665UE,16G DDR4内存、64G eMMC储存,后续将通过SATA接口挂载6T或以上硬盘储存数据。
25 | 其它具体对外物理接口和参数如下(摘自UP Xtreme Datasheet):
26 |
27 | 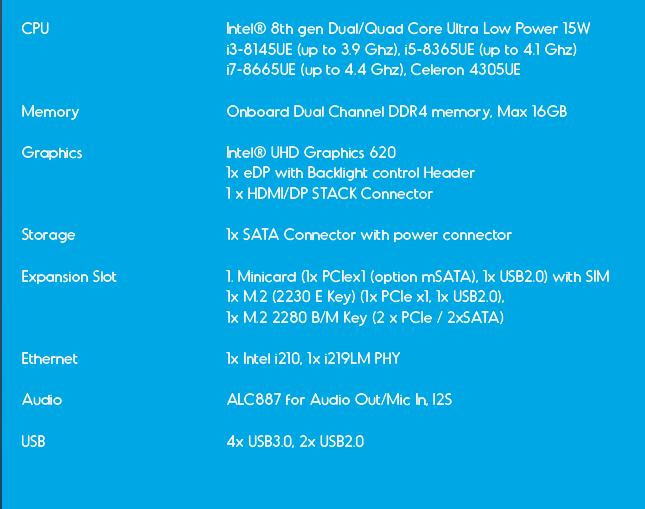
28 |
29 | 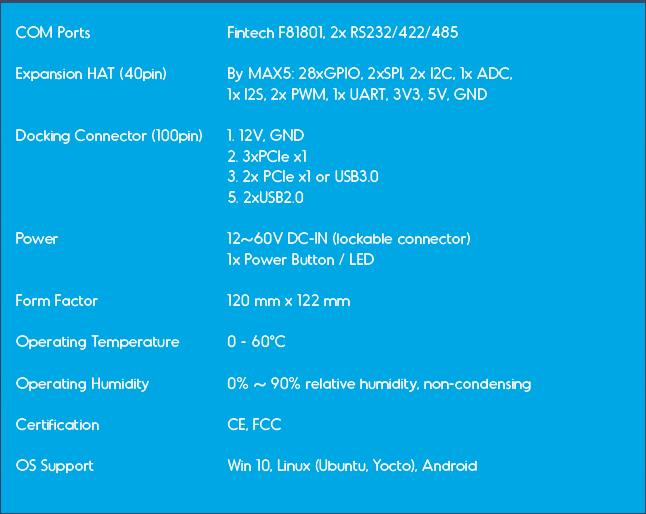
30 |
31 | ### 服务器
32 |
33 | 由于实验室开发板处于内网环境,为方便调试,设置了腾讯云上海四区公网服务器,其基本开发环境配置与开发板基本相同。请提前向文档作者申请ssh账号,用于登录及远程调试。
34 |
35 | - 域名:`phi.ctcat.cn`
36 | - IP:`121.4.136.4`
37 |
38 | # MEC软件架构
39 |
40 | MEC软件主要由数据处理、应用服务、数据发送和本地控制4个基本模块组成,基本关系如下图所示:
41 |
42 | 
43 |
44 | ## 数据处理模块
45 |
46 | - 数据处理与汇聚 :汇聚云端下发指令和数据、雷视数据融合的结果及RSU返回的车辆数据,进行结构化。
47 |
48 | ## 数据接口模块
49 |
50 | - 数据库:对视频数据和车辆轨迹数据保存一定期限(如30日),过期数据定期清理;
51 | - 通用数据接口:基于数据库所储存的数据,为应用服务模块提供统一的通用数据接口,支撑具体业务开展。
52 |
53 | ## 应用服务模块
54 |
55 | - MEC应用服务调用:根据业务逻辑,按照当前开放应用列表(可更新)调用各应用模块,并通过通用数据接口获取各应用所需的数据;
56 | - 应用:每一个应用是一个.so库,由本模块按照当前开放应用列表(可更新)进行加载;统一接口形式,输入结构化数据,决策当前应用是否被触发,并输出控制变量,即后续待发送的消息。
57 | - 优先级控制:获取各个应用.so库输出的控制指令并对优先级进行判别,分发当下控制指令;
58 | - 溢出控制:抛弃消息发送队列中不能在规定时延要求内发送的消息,满足时延性能要求;
59 |
60 | ## 数据发送模块
61 |
62 | - 设备控制:根据优先级控制输出指令对各外接设备进行控制,实现交通控制。
63 |
64 | ## 本地控制模块
65 |
66 | - 控制上述4模块的启动和关闭;
67 | - 根据云端发送的更新指令,对各模块代码、配置文件和.so库文件进行更新;
68 | - 监控上述4模块的运行状态,及时处理错误、异常、崩溃等事件,保障服务连续可用性;
69 | - 日志。
--------------------------------------------------------------------------------
/1.2 边缘计算/1.2 边缘计算资料、报告/2021边缘计算产业图谱.md:
--------------------------------------------------------------------------------
1 | - [2021边缘计算产业图谱]( https://www.toutiao.com/a7018741050114146847/?log_from=a50e8cd99e341_1640931117762)
2 |
3 | 边缘计算社区每年都会统计调研边缘计算企业,公布边缘计算产业图谱,今年的图谱,在去年的基础上增加了产业服务一栏,图谱上总共涵盖了148家企业、单位及高校。
4 |
5 | 希望图谱对大家了解边缘计算市场行业有帮助。完整版图谱请移步到全球边缘计算大会·上海站查看,我们用24个平方打造了一面属于边缘计算的产业图谱墙。
6 |
7 | 边缘计算社区长期保持中立,与图谱上企业无任何利益往来,图谱仅供学习了解边缘计算赛道玩家,本图谱不构成任何投资建议。
8 |
9 | 
10 |
11 |
12 |
13 | 
14 |
15 |
16 |
17 | 
18 |
19 |
20 |
21 | 
22 |
23 |
24 |
25 | 
26 |
27 |
28 |
29 | 
30 |
31 |
32 |
33 | 
34 |
35 |
36 |
37 | 
38 |
39 |
40 |
41 | 
42 |
43 |
44 |
45 | 
46 |
47 |
48 |
49 | 
--------------------------------------------------------------------------------
/1.2 边缘计算/1.2 边缘计算资料、报告/AI边缘计算网关在车路协同中的应用.md:
--------------------------------------------------------------------------------
1 | - [AI边缘计算网关在车路协同中的应用](https://www.cnblogs.com/star-elink/articles/15225944.html)
2 |
3 | 随着智慧城市建设的不断推进,城市交通也亟待升级优化,智慧交通监控通过放置在道路和路边的各种高清及超高清网络摄像机和Al BOX网关等设备,对道路路况和来往车辆进行实时监控、视频/图像回传和存储,结合Al、移动互联网、物联网、云计算、大数据等技术,实现道路、车辆、交通监管设备之间的快速通信和信息共享。
4 |
5 | 
6 |
7 | ## AI网关车路协同场景需求
8 |
9 | 1.交叉路口:
10 |
11 | 交通数据采集;高精地图;人车实时感知;路网态势监测;道路信息发布
12 |
13 | 2.高速/城市快速路口:
14 |
15 | 高速巡航系统;感知系统;违法事件检测
16 |
17 | 
18 |
19 | ## 车路协同拓扑图
20 |
21 | 
22 |
23 | ## 视频AI网关的视觉+毫米波+激光雷达融合
24 |
25 | 1.交通参与者感知,实现车辆、非机动车的检测识别;
26 |
27 | 2.对交通参与者进行高精度定位,实现位置、速度、方向及车距的感知,分析发布交通态势;
28 |
29 | 3.识别车道线、停车线、斑马线、可行驶区域、标识牌等;
30 |
31 | 4.车道交通事件检测,包括拥堵检测、异常停车检测、超速/低速行驶、逆行、道路施工、抛洒物检测等。
32 |
33 | ## 车路协同的解决方案
34 |
35 | 
36 |
37 | 通过边缘计算服务器对外设备接入摄像头、毫米波、激光雷达等设备通过4G/5G/WiFi等无线通信模块(AI视频网关),对采集的数据进行AI融合算法实现远程视频监控。
--------------------------------------------------------------------------------
/1.2 边缘计算/1.2 边缘计算资料、报告/技术参考边缘计算平台、行业解决方案 .md:
--------------------------------------------------------------------------------
1 | - [技术参考 | 边缘计算平台、行业解决方案](https://mp.weixin.qq.com/s/3uJQX2G1t9dyVr5a5YFj0A)
2 |
3 | 边缘计算是指在靠近数据源头执行计算的一种新型计算架构。边缘计算基于融合的边缘侧 计算、存储、网络能力,就近提供边缘智能服务,满足行业数字化转型所面临的敏捷连 接、实时业务、智能应用、数据安全等关键需求。据Gartner预测,到2021年底将有 50%的大型企业在项目中纳入边缘计算。而到2022年,边缘计算将成为所有数字业务的 必要需求。2025年将有75%的数据产生在数据中心和云之外并在边缘侧进行处理。边缘 计算与云计算、人工智能、物联网、5G等技术协同,成为国家新基建的核心所在。
4 |
5 | 本白皮书将分析边缘计算发展的需求和挑战,阐述联想在边缘计算领域的思考和布局,介 绍联想边缘计算产品、技术、解决方案及行业应用。
6 |
7 | **1、白皮书介绍联想边缘计算平台。**联想边缘计算平台赋能行业客户进行各种智能化转型。平台支持方便的应用上线、灵活的数据接入、高效的应用管理、优化的应用赋能,以全融合一体机方式部署的联想边缘计算平台更是能够支持极简部署、自动扩容和智能运维……
8 |
9 | **2、白皮书介绍联想边缘计算行业创新解决方案。**
10 |
11 | **基于5G+边缘计算的智慧园区。**以微型ICT数据中心下沉到园区机房,解决客户数据实时性传输和处理、数据安全性和保密性的痛点,为园区提供低时延、高带宽、高可靠、数据不出园区的综合管理。
12 |
13 | **基于5G+边缘计算的智慧商超。**针对客户室内定位弱、地下停车难、顾客无法自主引流的痛点,结合智能信标的新型室分天线系统,以及部署在边缘计算平台的应用服务,构建了稳定可靠的室内定位参考系,为商超提供室内定位精准化、地下停车引导自动化、顾客引流智能化的服务和物联网应用集成能力,打造智慧商超新型商业模式。
14 |
15 | **基于5G+边缘计算的智慧工地**。针对传统工地安全管理缺乏有效机制、施工作业人工化程度高、工地安全监管人力成本高的痛点,运用高清摄像头和人工智能分析手段让机器视觉代替人眼提前发现问题,规避可能的危险事故发生,为工地提供管理无人化、监管自动化服务。
16 |
17 | **智能化生产线应用管理优化。**随着工业互联网的发展,很多企业都在工厂车间的生产线上部署了各种各样的智能应用。例如,基于机器视觉的产品质检、基于AR的装配指导、基于声学监测的故障发现等。这些应用的单独部署和维护一方面存在着资源的严重浪费,另一方面也造成了很大的管理难度以及很高的管理成本。
18 |
19 | **5G 边缘云化 AR/VR。**方案基于5G网络切片打造“端-边-云”协同的AR/VR系统,包含大量轻量化AR/VR眼镜及配套的5G通信处理单元、多套分布的MEC平台和应用软件。系统基于软硬件一体化的轻量级虚拟化架构,搭载针对应用的快速接入、灵活编排和弹性资源管理和支撑,以及云边交互,GPU调度等核心技术能力。AR/VR应用借助于5G的低时延、大带宽、高可靠性,将渲染任务卸载到联想边缘计算平台上,可在移动端获得高质量的3D渲染,让使用移动芯片的AR/VR设备也能显示出顶级的画质。这将直接改善AR/VR设备的形态和重量,增强用户的真实感体验。
20 |
21 | **基于联想超能云桌面的端-边-云一站式教育解决方案。**基于联想边缘计算平台构建的云边端一体化安全办公解决方案,满足行业用户对Windows终端设备统一部署、数据安全、集中管控等核 心需求。对比传统云桌面技术,联想超能云桌面具有卓越体验、集中管控、安全可靠、兼容性好等多种优势。
--------------------------------------------------------------------------------
/1.2 边缘计算/1.2 边缘计算资料、报告/边缘计算设备有哪些分类.md:
--------------------------------------------------------------------------------
1 | - [边缘计算设备有哪些分类](https://www.cnblogs.com/5gwangguan/p/15045280.html)
2 |
3 | ## **边缘计算的优势**
4 |
5 | 边缘计算,也叫分布式计算相关、雾计算、多边计算,主要优势是在数据采集端或系统边缘端就完成了对海量设备数据的整合、分析和计算反馈。边缘计算能够节省通信带宽,降低网络延迟、减少了数据通信量,提高系统安全性保密性,以及更少依赖存储和算力资源,可以提高边缘设备的可靠性和控制力。
6 |
7 |
8 |
9 | 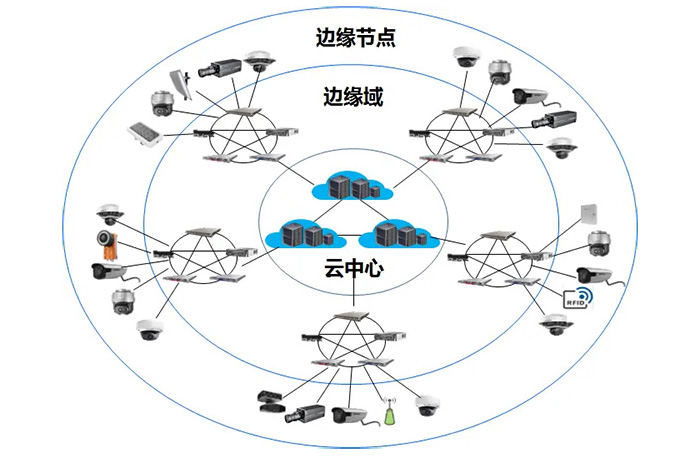
10 |
11 |
12 |
13 | ## **边缘计算设备的类型:**
14 |
15 | **1、智能传感器**。传感器实时或定时采集设备、环境、子系统的状态信息后,就地实现对数据的归类、分析、封装,减少数据上传后再计算分析的时间和资源消耗,提高系统监测效率。
16 |
17 | **2、可编程逻辑控制器(PLC)**。PLC本质上就是一台具备编程、运算、控制、输出等能力的智能电脑,只是根据工业生产、行业应用的需求进行了适应性融合设计。PLC同样在边缘端低延时、高效率地管理、控制设备运行。
18 |
19 | **3、边缘智能路由器**。以BMR500边缘智能路由器为例,实现将有线/4G全网通联网方式、高速路由、WIFI支持、本地存储、设备监测及前端设备控制等功能集合一体,丰富的行业接口和应用功能接口,支持对复杂功能的边缘设备的一站式接入,提高数据通信的集中化水平和高效率。
20 |
21 | 
22 |
23 | **4、ICT融合网关**。ICT是信息、通信和技术三个英文单词的词头组合(Information Communications Technology),例如BMG5100多功能融合网关,具备先进的设备接入能力、数据采集能力、边缘计算能力、5G/4G/有线等综合通信传输能力等,实现对物联网系统的大范围、多设备的数据交互和全程控制。
24 |
25 |
26 |
27 | 
28 |
29 | **边缘计算设备选型的要点:**
30 |
31 | 1、支持通信、控制、设备接入等多功能集成,有效管理和控制接入的系统设备。
32 |
33 | 2、从硬件芯片到系统软件都支持边缘计算算法,智能化水平高,支持无人值守、智能响应。
34 |
35 | 3、功能接口丰富,还支持工业、环保、输配电等行业协议,支持接入复杂设备,部署便捷。
36 |
37 | 4、支持有线和无线网络通信,满足不同现场项目的通信网络状况,可灵活选择通信模式,有线无线网络还可互为备份,多重保障设备不掉线。
--------------------------------------------------------------------------------
/1.2 边缘计算/1.2 边缘计算资料、报告/边缘计算(一)边缘计算的兴起.md:
--------------------------------------------------------------------------------
1 | - [边缘计算(一)——边缘计算的兴起](https://blog.csdn.net/zNZQhb07Nr/article/details/85242616?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522164178385216781683973913%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=164178385216781683973913&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_ecpm_v1~rank_v31_ecpm-2-85242616.nonecase&utm_term=%E8%BE%B9%E7%BC%98%E8%AE%A1%E7%AE%97&spm=1018.2226.3001.4450)
2 |
3 | 边缘计算这个词近日来逐渐出现在人们的视线里,原因是什么?如何看待边缘计算?下面将根据边缘计算的兴起、边缘计算的定义与内涵、计算模型等几个系列为大家讲述。不当之处,敬请批评指正。
4 |
5 | 近十多年来,中心化的云计算模型一直被认为是标准的IT交付方式,通过数据中心集中提供丰富的计算和存储资源。这是目前被大家接受的一种普遍的做法,而这种做法目前已经进入到了成熟期,不可否认,云计算显著地降低了企业投资建设、运营维护成本。但是随之而来的也出现了诸多问题,如:资源闲置,安全隐私等问题。根据IDC统计的数据显示,全球数据中心的数量从2016年开始下降,预计2020年将减少至42.2万个。
6 |
7 | 
8 |
9 | 来源:前瞻产业研究院 2018-10-25 15:05
10 |
11 | 随着万物互联趋势的不断加深,智能家居、智慧城市等终端设备数量不断增多,终端数据的增长速度远远超过了网络带宽的增速;同时AR/VR、车联网等众多新应用的出现对网络延迟提出了更高的要求。随着5G的逐渐推广使用,在不久的将来,将会出现一个流量爆炸的时间段。据Gartner预测,到2020年,智能终端设备规模将达到250亿台,思科估计是750亿台,IDC预测是500亿台,并且有超过50%的数据需要在网络边缘侧分析、处理与储存。
12 |
13 | 而这大量的智能终端将为基础网络带来诸多挑战,那就是智能互联的网络边缘侧面临着连接海量异构设备、业务实时性要求、应用智能化要求、安全与隐私要求等众多挑战。
14 |
15 | 一种全新的思路就是,希望能够通过网络,在海量的网络边缘设备实现云计算的功能。这种新兴的技术被称为“边缘计算”。
16 |
17 | 2014年3月,美国成立工业互联网联盟(IIC, Industrial Internet Consortium),由通用电气(GE)联合ATT、思科、IBM和英特尔发起。IIC定位为产业推广组织,致力于构建涵盖工业界、ICT界和其它相关方的产业生态,推动传感、连接、大数据分析等在工业领域的深度应用。
18 |
19 | 2015年11月19日,ARM、思科、戴尔、英特尔、微软和普林斯顿大学Edge Laboratory等物联网领导者成立了开放雾联盟(OFC,OpenFog Consortium)。
20 |
21 | 2016年11月30日,边缘计算产业联盟(ECC,Edge Computing Consortium)在北京成立。该联盟由华为技术有限公司、中国科学院沈阳自动化研究所、中国信息通信研究院、英特尔公司、ARM和软通动力信息技术有限公司创始成立,首批成员单位共62家,涵盖科研院校、工业制造、能源电力等不同领域。
22 |
23 | 其中的一个应用例子就是AWS DeepLens相机将1080p相机与Linux操作系统和专用软件集成在一起。该软件允许在Amazon Web Services中开发的机器学习算法直接在相机上执行。而不是等待设备捕获图像或视频,将该视频发送到云,等待响应,然后将响应返回到设备,智能模型直接在设备上执行。这些本机进程提供了几乎可实时的智能工具集,可以集成到业务应用程序中。
--------------------------------------------------------------------------------
/1.2 边缘计算/1.3边缘计算公司/雪湖科技.md:
--------------------------------------------------------------------------------
1 | - [雪湖科技](http://www.snowlake-tech.com/lidareye)
2 |
3 | ## LiDAREYE
4 |
5 | 是雪湖科技专为智慧交通场景设计的嵌入式AI感知边缘计算机,内置可实时处理激光雷达3D点云数据和视频数据的AI硬件加速引擎和AI算法,实现激光雷达点云数据和视频数据的融合,满足不同场景下的路侧感知需求。
6 |
7 | ## 产品特点
8 |
9 | 
10 |
11 | ## LiDAREYE 规格参数
12 |
13 | 
14 |
15 | ## 满足智慧交通路侧需求
16 |
17 | 
18 |
19 | ## **提供完整工具链,易集成**
20 |
21 | 
22 |
23 | ## **使用流程**
24 |
25 | 
--------------------------------------------------------------------------------
/1.2 边缘计算/1.5 边缘计算网关/华智有为:智能边缘计算网关规格书.md:
--------------------------------------------------------------------------------
1 | ## **产品性能规格**
2 |
3 | 
4 |
5 | 
6 |
7 | 
--------------------------------------------------------------------------------
/1.2 边缘计算/5. EdgeGallery/EdgeGallery简介.md:
--------------------------------------------------------------------------------
1 | 官网:https://www.edgegallery.org/
2 |
3 |
--------------------------------------------------------------------------------
/1.3 车联网/2. 车联网参考资料、报告/CSDN-星焱-车联网项目.md:
--------------------------------------------------------------------------------
1 | [0. 车联网数据平台项目构建指南——MQTT+EMQ+Kafka+KSQL+Tensorflow](https://blog.csdn.net/qq_41094332/category_9659856.html)
--------------------------------------------------------------------------------
/1.3 车联网/2. 车联网参考资料、报告/车联网技术笔记.md:
--------------------------------------------------------------------------------
1 | - [车联网技术笔记](https://blog.csdn.net/weixin_44207985/article/details/115370825?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522164430035916780255250863%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=164430035916780255250863&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~top_click~default-3-115370825.nonecase&utm_term=%E8%BD%A6%E8%81%94%E7%BD%91&spm=1018.2226.3001.4450)
2 |
3 | ## V2X笔记
4 |
5 | 
6 | 我国主导推动的是C-V2X技术, 包括LTE-V2X(基于4G设计的车联网无线通信技术)解决基础安全预警和效率提升类应用需求
7 |
8 | NR-V2X(基于5G设计)满足未来高等级自动驾驶应用场景需求
9 |
10 | 两者业务能力互补,将长期共存
11 |
12 | ### V2X场景分类
13 |
14 | 主要分成:安全性服务和非安全性服务。
15 |
16 | - 安全服务类应用场景主要用于减少和避免交通事故的发生以及对生命和财产的保护;
17 | - 非安全类应用场景作为补充服务,主要用于提高交通效率和环境性能。
18 |
19 | 表1 3GPP定义的典型车路协同应用场景
20 | 
--------------------------------------------------------------------------------
/1.3 车联网/5G车联网/5G车联网技术与产业进展.md:
--------------------------------------------------------------------------------
1 | # 5G车联网技术与产业进展
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
--------------------------------------------------------------------------------
/1.3 车联网/清华大学苏州汽车研究院.md:
--------------------------------------------------------------------------------
1 | - [基于车联网的城市交通运行监测与管控系统研究](https://www.tsari.tsinghua.edu.cn/scientific/znwlCar/2020-10-29/367.html)
2 |
3 | ## 基于车联网的城市交通运行监测与管控系统研究
4 |
5 | 基于车联网的城市交通运行监测与管控系统理论研究主要用于分析掌握城市交通运行状态与发展态势,研究考虑时变网络供给与冬天交通需求特性的城市交通动态诱导模型、城市交通系统智能协同理论,建立适合我国国情的城市交通运行监测与管控系统。
6 |
7 | 
8 |
9 | **车联网大数据来源示意**
10 |
11 | 该研究通过对交通大数据细致分析,探索了车联网给城市交通运行监测与管控带来的影响和机会,明确了相关基础学科的科学问题。
12 |
13 | ### 应用范围
14 |
15 | 城市交通规划设计
16 |
17 | ### 理论逻辑
18 |
19 | • 车载单元作为车联网大数据基础单元
20 |
21 | • 路侧单元、卫星定位系统等对车载单元进行反馈
22 |
23 | • 控制中心集成数据并对车载单元进行反馈
24 |
25 | ### 处理模式
26 |
27 | • 以 OD 估计为基础,仿真系统与数据处理系统协同处理
28 |
29 | • 基于基础路网数据与输入 OD 建立仿真模型
30 |
31 | • 考虑随机项扰动情况,对虚拟数据进行检验
32 |
33 | - **车联网大数据采集与研究方法**
34 | - **动态 OD 获取系统仿真平台逻辑**
35 |
36 | ### 模拟分析与预测结果
37 |
38 | • 基于车联网大数据进行模型预测测算获得下列相关结果
39 |
40 | 
41 |
42 | **BP 神经网络与改进 PSO 算法优化神经网络模型预测结果**
43 |
44 | ## 车联网智能监控平台
45 |
46 | 车联网智能监控平台,通过对动态变化中的 人、车、路全场景数据化,提出“端 + 云”双闭环安全监控管理策略,提供远程人工服务、大数据分析和统计报表功能,方便营运单位及监管部门对在途车辆的运行情况进行管理。
47 |
48 | 
49 |
50 | **车联网智能监控平台**
51 |
52 | ### 应用范围
53 |
54 | 智能网联系统
55 |
56 | ### 主要功能
57 |
58 | • 车辆监控:查看车辆实时位置和行驶轨迹,对单车进行实时监控
59 |
60 | • 安全管理:查看警报信息和风险车辆,对警报和风险进行及时处理
61 |
62 | • 报警明细:基于警报数据对车辆、司机和公司进行分析评估
63 |
64 | • 风险等级:基于报警的类别和频次进行五级分类管理
65 |
66 | • 机务管理:以公司为单位,管理子公司、司机、车辆和设备
67 |
68 | • 系统管理:以公司为单位,管理公司用户
69 |
70 | ### 特色功能
71 |
72 | • 实时监控:实时查看驾驶员和行车环境的状态
73 |
74 | • 统计报表:定期地生成综合统计报表,呈现车辆的 运行状况
75 |
76 | - **危险驾驶行为实时监控**
77 | - **证据保存**
78 |
79 | 
80 |
81 | **报表分析**
--------------------------------------------------------------------------------
/1.3 车联网/车联网图片备忘录.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | ## V2V的工作原理如下图
4 |
5 | 
6 |
7 | ## V2I的工作原理如下图
8 |
9 | 
10 |
11 | ## 基于V2X技术的软件通用流程
12 |
13 | 
--------------------------------------------------------------------------------
/1.3 车联网/车联网的技术关键在哪里?.md:
--------------------------------------------------------------------------------
1 | 车联网的技术关键在哪里?
2 |
3 | 如果你现在加入车联网大行业,绝对是正确的选择,但是车联网也有很高的技术门槛,可以来看看:
4 |
5 | ## 1、传感器技术及传感信息整合:
6 |
7 | 
8 |
9 | ## 2、开放的、智能的车载终端系统平台
10 |
11 | 
12 |
13 | ## 3、语音识别技术
14 |
15 | 
16 |
17 | ## 4、服务端计算与服务整合技术
18 |
19 | 
20 |
21 | ## 5、通信及其应用技术
22 |
23 | 
24 |
25 | ## 6、互联网技术
26 |
27 | 
--------------------------------------------------------------------------------
/1.6 仿真系统/车路协同环境下多车协同车速引导建模与仿真.md:
--------------------------------------------------------------------------------
1 | - [车路协同环境下多车协同车速引导建模与仿真](https://wenku.baidu.com/view/e0976cd0b307e87100f69649.html)
2 |
3 |
--------------------------------------------------------------------------------
/1.7 冉斌教授-车路协同资料/1 专利相关/车路协同下道路交叉口信号控制优化方法.md:
--------------------------------------------------------------------------------
1 | - [车路协同下道路交叉口信号控制优化方法 (magtech.com.cn)](http://manu01.magtech.com.cn/Jwk_jtys/CN/Y2013/V13/I3/40)
2 |
3 | **摘要:**
4 |
5 | 车路协同系统能实时获取车辆个体的运行状态信息,并能通过速度引导实现车辆与交通控制系统之间的动态交互,为交通信号控制提供了新的数据源和技术手段.分析了现有车路协同下交通信号控制方法存在的不足,引入基于时间窗的滚动预测方法,提出了改进的交叉口信号控制优化流程;将相位饱和度作为表征信号控制效果的指标,在考虑速度引导对车辆运行状态影响基础上,建立了车路协同环境下道路交叉口信号控制优化方法和模型.运用VISSIM软件进行了仿真实验,结果表明,本文方法优于感应控制方法,在各种交通流量下均能有效降低交叉口平均延误和停车次数。
6 |
7 |
--------------------------------------------------------------------------------
/2.1 智能网联车/1.2 团体标准/标准立项|《智能网联汽车 车控操作系统功能安全技术要求》 .md:
--------------------------------------------------------------------------------
1 | - [标准立项|《智能网联汽车 车控操作系统功能安全技术要求》](https://mp.weixin.qq.com/s/7WxK7xb3nxGdOVU8gL-N5g)
2 |
3 | # 标准研制背景及意义
4 |
5 | 2021年全国两会,汽车领域代表提议集中力量攻克智能网联汽车安全实时车控操作系统技术难题,制定中国汽车操作系统的发展纲领和行业标准,鼓励和引导中国汽车操作系统的发展。2021年7月,汽标委智能网联汽车分标委发布《车控操作系统架构研究报告》和《车控操作系统总体技术要求研究报告》,明确定义了车控操作系统总体架构(如图1),并分别描述了系统软件架构和功能软件架构里各个主要核心功能和应用需求,同时对车控操作系统研究背景、系统软件要求、功能软件要求、硬件接口要求、应用软件接口要求、系统安全要求进行了说明,针对系统安全,建议标准化车控操作系统功能安全,并将《智能网联汽车 车控操作系统功能安全技术要求》列入车控操作系统团体标准体系计划。
6 |
7 | 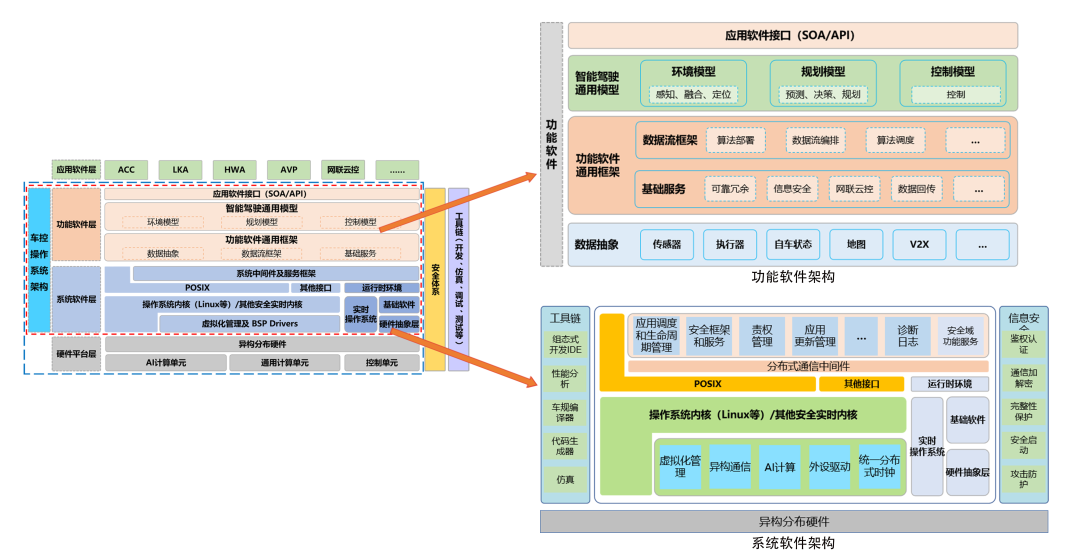
8 |
9 | 图1 系统架构
10 |
11 |
12 |
13 | 目前国内外已发布多项功能安全标准,如功能安全领域的国际标准ISO 26262《Road vehicles - Functional safety》,功能安全国标GB 17675-2021《汽车转向系统基本要求》、GB 38031-2020《电动汽车用动力蓄电池安全要求》、GB 18384-2020《电动汽车安全要求》、GB/T 39086-2020《电动汽车用电池管理系统功能安全要求及试验方法》等,但以上标准都偏向于各控制域或各特定功能,缺乏对车控操作系统的功能安全要求进行标准化,国汽智控(北京)科技有限公司于2020年牵头立项CSAE标准《车控操作系统功能软件架构及接口要求》,规定了智能网联汽车车载智能计算基础平台车控操作系统功能软件的总体架构、总体要求和接口要求,但没有具体说明功能安全要求。因此,为满足车控操作系统功能安全需求,形成国内行业共识,亟需组织行业优势单位建立与车控操作系统架构相配套且符合车规级功能安全要求的技术标准规范。
14 |
15 | 《智能网联汽车 车控操作系统功能安全技术要求》由清华大学苏州汽车研究院(相城)、国汽智控(北京)科技有限公司牵头,联合清华大学、华为、地平线、蔚来汽车、普华、博世、高通等行业优势单位共同制定。该标准从安全假设、安全机制、安全状态、安全确认和安全集成等方面对车控操作系统功能软件和系统软件各模块的功能安全要求进行规范。
16 |
17 | 功能安全要求是保障车控操作系统安全、可靠运行的基础和核心,通过标准化将有效支撑车控操作系统架构的前期设计,降低应用开发的功能安全实现压力,提高开发的效率和质量,加快推进车控操作系统产业化落地。
18 |
19 | 
20 |
21 | 图2 车控操作系统功能安全要求架构
22 |
23 | 联系人
24 |
25 | 《智能网联汽车 车控操作系统功能安全技术要求》标准负责人:
26 |
27 | 万继云wanjiyun@tsari.tsinghua.edu.cn
28 |
29 | 18501582162/15311890928(同微信)
30 |
31 | **中国汽车工程学会 标准管理部:**
32 |
33 | 吴文强 wwq@sae-china.org
34 |
35 | 18526626978(同微信)
36 |
37 | 中国智能网联汽车产业创新联盟:
38 |
39 | 孙宫昊 sungonghao@china-icv.cn
40 |
41 | 16601231611(同微信)
42 |
43 |
--------------------------------------------------------------------------------
/2.1 智能网联车/2.3 网联车算法相关参考资料/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/2.1 智能网联车/2.3 网联车算法相关参考资料/.keep
--------------------------------------------------------------------------------
/2.1 智能网联车/2.4 知乎:JuIy智能网联车系列/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/2.1 智能网联车/2.4 知乎:JuIy智能网联车系列/.keep
--------------------------------------------------------------------------------
/2.1 智能网联车/4. 信息安全/智能网联汽车信息安全解决方案.md:
--------------------------------------------------------------------------------
1 | - [智能网联汽车信息安全解决方案](https://wenku.baidu.com/view/c725c63130b765ce0508763231126edb6f1a762d.html)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | # 百度的探索和实践:检测与防御
10 |
11 | ## 汽车信息安全测试体系
12 |
13 | 
14 |
15 | 
--------------------------------------------------------------------------------
/2.1 智能网联车/5G BRT智能网联车路协同解决方案.md:
--------------------------------------------------------------------------------
1 | - [5G BRT智能网联车路协同系统](https://www.gsma.com/greater-china/wp-content/uploads/2020/05/%E5%A4%A7%E5%94%90-5G-BRT%E6%99%BA%E8%83%BD%E7%BD%91%E8%81%94%E8%BD%A6%E8%B7%AF%E5%8D%8F%E5%90%8C%E7%B3%BB%E7%BB%9Fv1.pdf)
2 |
3 | ## 5G BRT智能网联车路协同解决方案
4 |
5 | 
6 |
7 | ### 业务应用1-超视距防碰撞
8 |
9 | 
10 |
11 | ### 业务应用2-实时车路协同
12 |
13 | 
14 |
15 | ### 业务应用3-智能车速策略
16 |
17 | 
18 |
19 | ### 业务应用4-安全精准停靠
20 |
21 | 
--------------------------------------------------------------------------------
/2.1 智能网联车/5G与车联网的融合.md:
--------------------------------------------------------------------------------
1 | # 5G与车联网的融合
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | # 5G与物联网的融合
32 |
33 | 
34 |
35 | 
36 |
37 | 
--------------------------------------------------------------------------------
/2.1 智能网联车/中国智能网联汽车技术平台.md:
--------------------------------------------------------------------------------
1 | - [中国智能网联汽车技术平台](https://blog.csdn.net/weixin_55366265/article/details/121155196)
2 |
3 | 
4 |
5 | 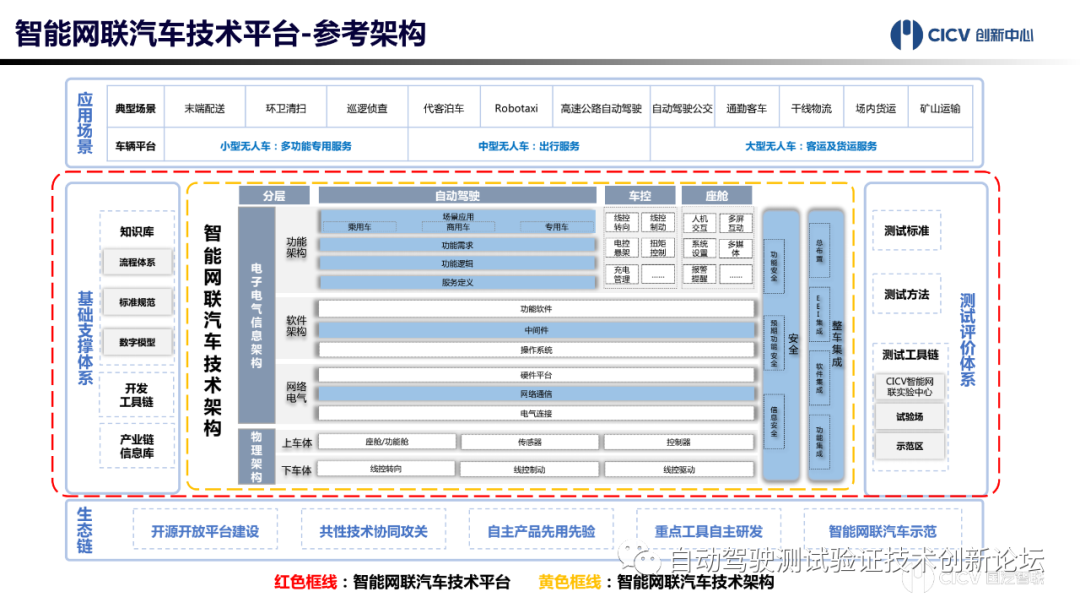
6 |
7 | 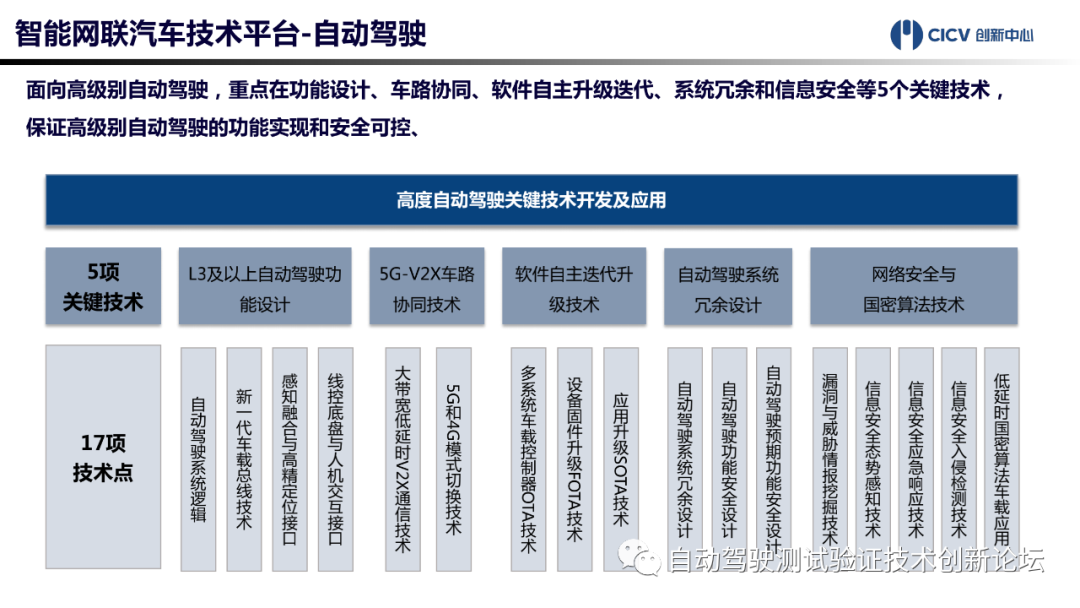
8 |
9 | 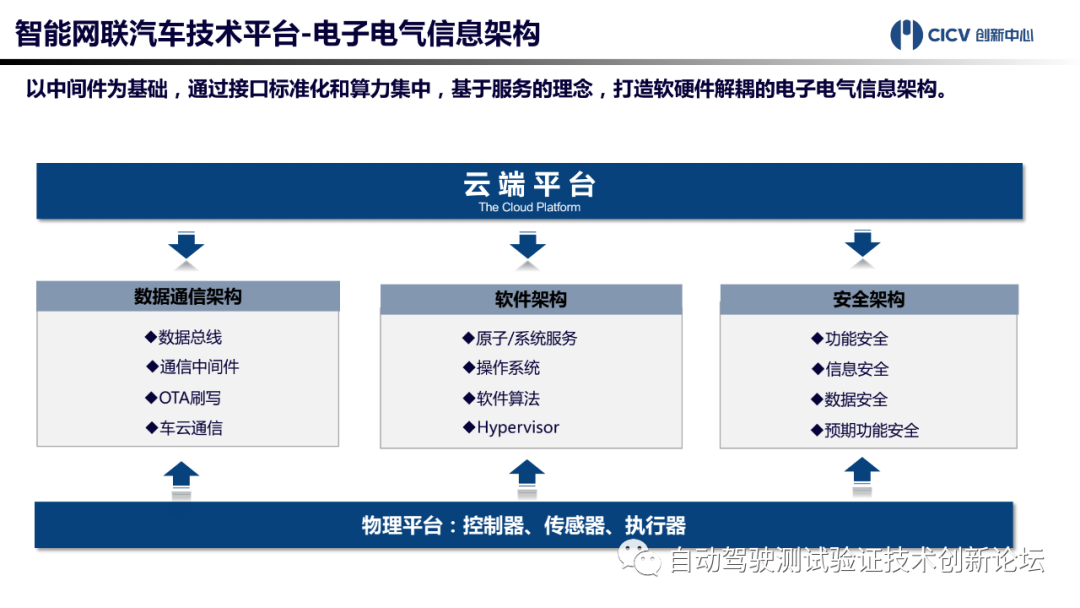
10 |
11 | 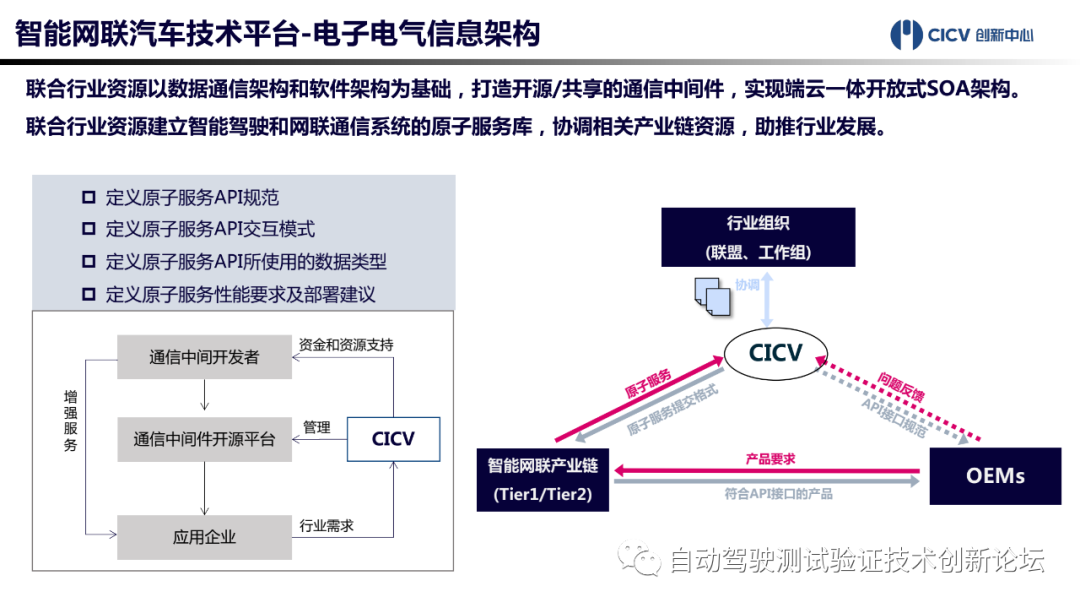
12 |
13 | 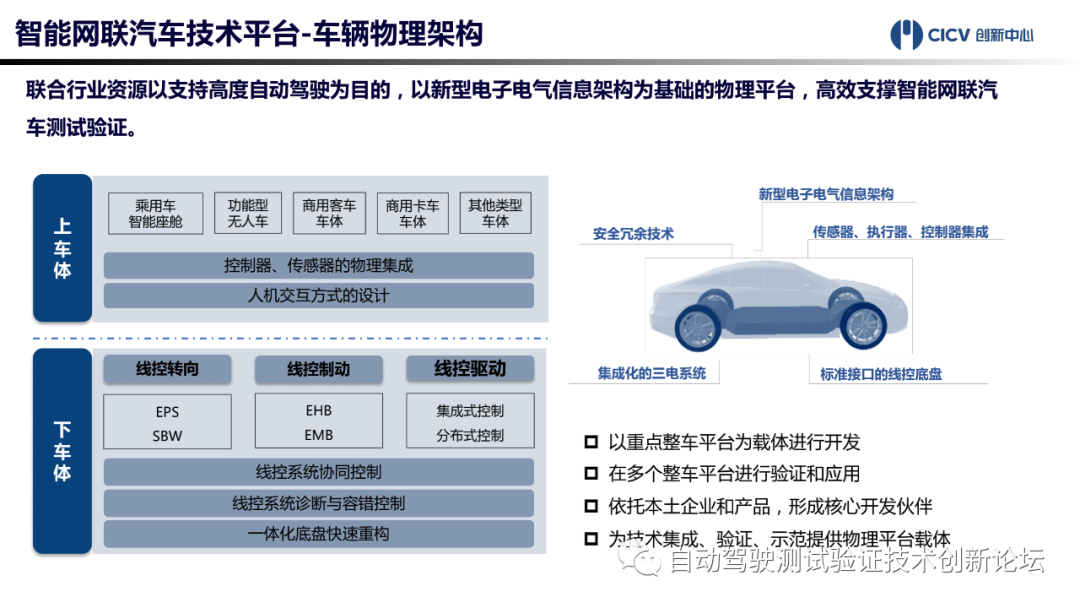
14 |
15 | 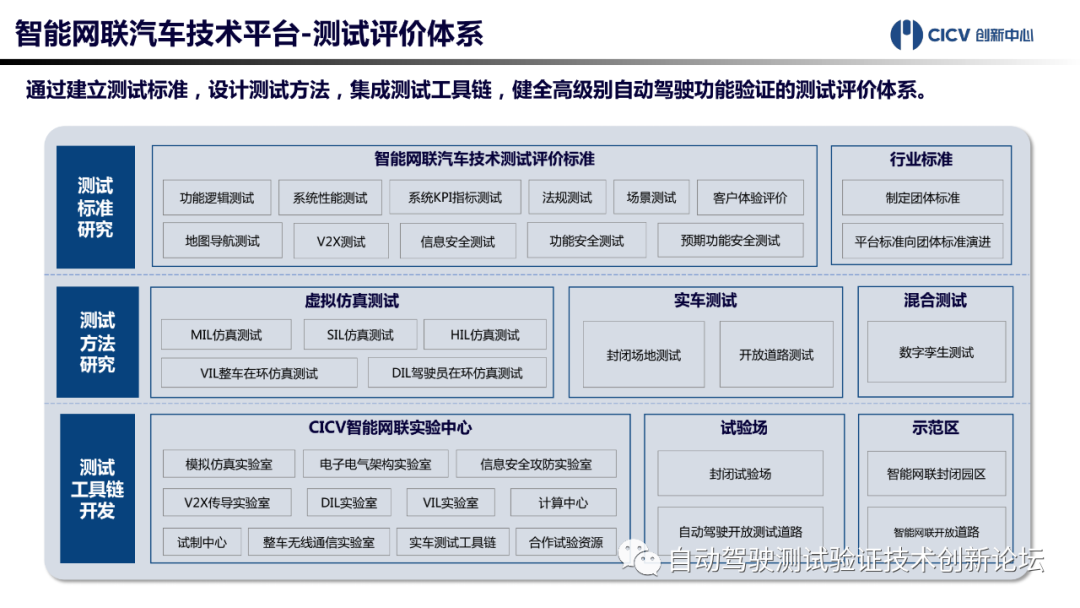
16 |
17 | 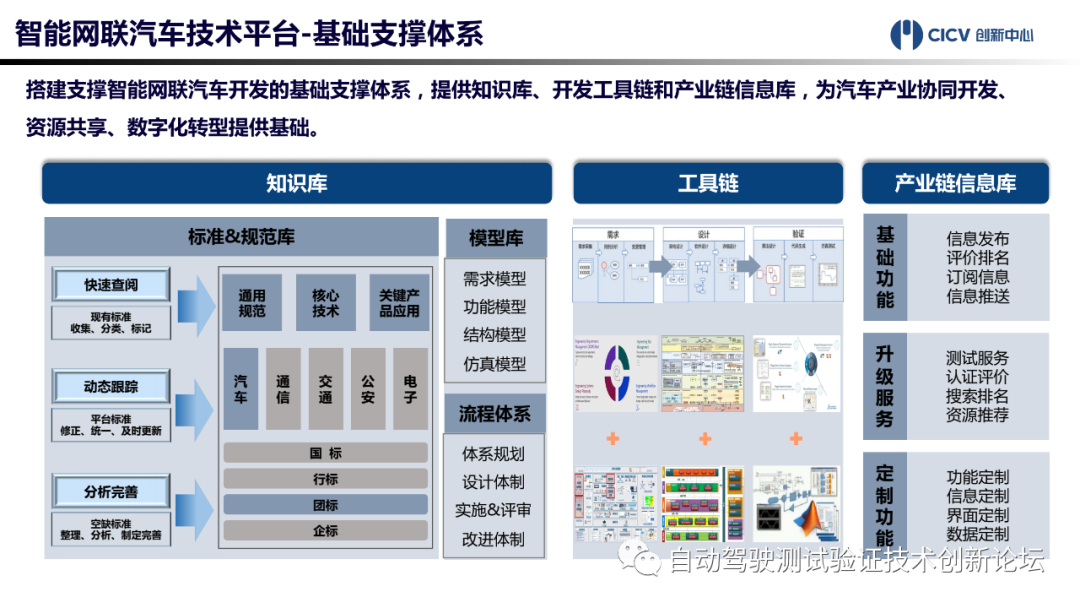
18 |
19 | 
--------------------------------------------------------------------------------
/2.1 智能网联车/车联网--5G+北斗精准定位赋能V2X安全辅助驾驶服务V5.md:
--------------------------------------------------------------------------------
1 | - [车联网--5G+北斗精准定位赋能V2X安全辅助驾驶服务V5](https://wenku.baidu.com/view/0a5262f25e0e7cd184254b35eefdc8d377ee1479.html)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
--------------------------------------------------------------------------------
/2.1.2 智能驾驶/CSDN:FUXI_Willard-自动驾驶相关/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/2.1.2 智能驾驶/CSDN:FUXI_Willard-自动驾驶相关/.keep
--------------------------------------------------------------------------------
/2.1.2 智能驾驶/CSDN:筋斗云与自动驾驶/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/2.1.2 智能驾驶/CSDN:筋斗云与自动驾驶/.keep
--------------------------------------------------------------------------------
/2.1.2 智能驾驶/CSDN:筋斗云与自动驾驶/自动驾驶入门技术(6) —— 定位导航技术.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶入门技术(6) —— 定位导航技术](https://blog.csdn.net/ckc108727ckc/article/details/103380150)
2 |
3 | ## 1、GNSS 与 IMU定位技术对比分析
4 |
5 | 
6 | 
7 |
8 | ## 2、RTK - GNSS 和 PPP-GNSS定位技术对比分析
9 |
10 | 
11 |
12 | 
13 |
14 | ## 3、 GPS和IMU组合导航耦合形式对比
15 |
16 | 
17 |
18 | ## 4、基于环境特征匹配的定位技术
19 |
20 | 
21 |
--------------------------------------------------------------------------------
/2.1.2 智能驾驶/博客园:无人驾驶- Polaris8/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/2.1.2 智能驾驶/博客园:无人驾驶- Polaris8/.keep
--------------------------------------------------------------------------------
/2.2 智能座舱/基于 H3 + RH850 的智能座舱功能安全设计.md:
--------------------------------------------------------------------------------
1 | - 微信公众号:燃云汽车:[基于 H3 + RH850 的智能座舱功能安全设计](https://mp.weixin.qq.com/s?__biz=Mzg2MzAyMDIzMQ==&mid=2247553405&idx=1&sn=bf37dd50354f963a1eb05b73a0b05e1d&chksm=ce7ca4d5f90b2dc33fc9fac772ac054024b8c8b4b61bdc7490e33c9442f1ff9775dbbb7c766f&scene=132#wechat_redirect)
2 |
3 |
--------------------------------------------------------------------------------
/2.3 自动驾驶/whuzhang16/自动驾驶定位概述.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶定位概述_whuzhang16的博客-CSDN博客_自动驾驶定位](https://blog.csdn.net/whuzhang16/article/details/108301152)
2 |
3 | 定位可以归为自动驾驶系统的感知模块,但它又有自己独特的技术特点,因此一般会把定位单独列出来。
4 |
5 | 自动驾驶车辆行驶的第一步是需要知道自己的位置,在复杂多变的城市环境中,定位位置的精度要求误差不超过10cm,如果偏差过大,在行驶过程中就很容易与道路周边设施发生剐蹭、碰撞。尽管在自动驾驶系统中也会有相应的避障功能辅助安全,但不能保障百分百避障成功。因此在自动驾驶技术的发展过程中,无论是从硬件还是软件层面,定位精度都有很重要的意义。
6 |
7 | 目前使用最广泛的自动驾驶定位方法包括融合全球定位系统(GNSS,Global Navigation Satellite System)和惯性导航系统(INS,Inertial Navigation System)。其中,GNSS的定位精度由器件成本决定,一般在几十米到几厘米级别之间,精度越高,成本也越贵。融合GNSS和INS的定位方法能够在一定程度上解决GNSS在环境恶劣条件(高楼、树木遮挡,大面积水域、隧道等)下定位精度偏差较大的影响,但对于城市这样大范围定位条件都不好的情况,单纯的GNSS+INS的定位技术还是不够满足自动驾驶的需求。
8 |
9 | 地图辅助类定位方法是另一种广泛使用的自动驾驶定位技术,代表算法是同步定位与地图构建(SLAm,Simultaneous Localization And mapping)。SLAM的目标是构建地图的同时使用该地图进行定位,SLAM通过传感器(摄像头、Lidar等)观测到的环境特征,确定当前车辆的位置以及当前观测目标的位置,这是一个利用以往的先验概率分布和当前的观测值来估计当前位置的过程,这一过程通常使用的方法有:贝叶斯滤波器(Bayesian Filter)、卡尔曼滤波器(Kalman Filter)、扩展卡尔曼滤波器(Extend Kalman Filter)、粒子滤波器(Partical Filter)等,这些都是基于概率和统计原理的定位技术。
10 |
11 | SLAM是机器人定位领域的研究热点,在特定场景下的低速自动驾驶定位的应用过程中也有较多现实的实例,如园区无人摆渡车、无人清洁扫地车、扫地机器人等,都广泛采用了SLAM技术。实际上,在此类特殊场景中,用户并不是在定位的同时实时建图,而是事先使用传感器(如激光雷达、摄像头等)对车辆运行环境区进行SLAM地图的构建,然后在建好的地图SLAM地图的基础上实现定位、路径规划等其他进一步的操作。
12 |
13 | 在有了一部分的点云地图之后,还可以通过程序和人工处理的方法将一些“语义”信息添加到地图中(如车道线标注、交通信号标志、红绿灯位置等),而这个包含了语义元素的地图通常就是我们所说的“高精度地图”。在实际定位的时候,使用3D激光雷达的扫描数据和事先构建的高精度地图进行点云匹配,以确定自动驾驶车辆在地图中的具体位置,这类方法被统称为扫描匹配(Scan Matching),其中最常见的方法是迭代最近点(ICP,Iterative Closest Point),该方法基于当前扫描与目标扫描的距离度量来完成点云配准。除此之外,正态分布变换(NDT,Normal Distributions Transform)也是进行点云配准的常用方法,它是基于点云特征直方图来实现配准的一种算法。基于点云配准的定位方法能够实现10cm以内的定位精度。
14 |
15 | 虽然点云配准能够给出较高精度的自动驾驶车辆相对地图的全局定位坐标,但是这类方法过于依赖事先构建好的高精度地图,而高精度地图的构建成本较高,地图测绘也受到较多测绘条例的要求和限制,并且点云匹配的计算开销很大(如Velodyne-32c每秒产生120w个点数据),以及车辆在高速行驶过程中对计算、控制的实时性要求较高,因此在高速场景使用点云匹配的方法成本过高、算力影响较为明显。
--------------------------------------------------------------------------------
/2.3 自动驾驶/whuzhang16/自动驾驶规划概述.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶规划概述_whuzhang16的博客-CSDN博客_自动驾驶规划](https://blog.csdn.net/whuzhang16/article/details/108312102)
2 |
3 | [自动驾驶](https://so.csdn.net/so/search?q=自动驾驶&spm=1001.2101.3001.7020)的规划模块一般分为三层:任务规划、行为规划和动作规划,也有称为路由寻径、行为决策和局部规划。对应我们日常出行,通常会先打开导航软件,找到出发地和目的地之间的路线(路由寻径),然后在沿着导航路径行驶的过程中,针对遇到的不同交通状况决定是停车还是超车或是其他行为,最后根据上一步的决定重新规划一条局部路径执行上步的动作。
4 |
5 | ## **一、任务规划**
6 |
7 | 是属于相对顶层、全局的[路径规划](https://so.csdn.net/so/search?q=路径规划&spm=1001.2101.3001.7020),如起始点之间的路径选择。
8 |
9 | 可以把道路系统简化成**有向图网络**(Directed Graph Network),这个有向图网络能够表示道路和道路之间的连接情况、通行规则、道路信息等,其本质上就是上文提到的高精地图的“语义”部分,这个有向图网络也被称为**路网图**(Route Network Graph)
10 |
11 | 
12 |
13 | 上述路网图中的每一条边都是带有权重的,因此,自动驾驶车辆的路径规划问题就可以转化为在路网图中,为了让车辆到达某个目的地,基于某种方法和原则选取最优路径的过程,规划问题就演变成了一个有向图搜索问题。传统算法如迪克斯特朗算法(Dijkstra's Algorithm)、A*算法(A* Algorithm)、D*算法等,主要用于计算离散图的最优路径搜索,被广泛应用于搜索路网图中代价最小路径的场景中。
14 |
15 | ## **二、行为规划**
16 |
17 | 也被称为行为决策、决策制定,其主要任务是根据路由寻径规划的目标和对当前环境的感知(如行人、周围车辆的位置、状态,信号灯状态等),做出下一步自动驾驶车辆需要执行的决策和动作,可以把这一层模块所起的作用理解为驾驶员的决策系统,驾驶员根据行驶目的地和当前交通状况决定是跟车还是超车、是停车还是绕过......
18 |
19 | 行为规划实现的一种方法是使用包含大量动作短语的复杂有限状态机(Finite State Machine, FSM)。有限状态机即从一个简单的起始状态出发,根据不同的驾驶场景跳转到不同的动作状态,同时将要执行的动作传递给下层的动作规划层。[深入浅出理解有限状态机](https://zhuanlan.zhihu.com/p/46347732)
20 |
21 | 虽然有限状态机(FSM)是目前自动驾驶系统采用的主流行为决策方法,但它仍存在很多局限性:
22 |
23 | 首先,要实现复杂的行为决策,需要人工设计大量有效的状态;
24 |
25 | 其次,车辆有可能会遇到FSM没有考虑过的状态,因此状态机的扩展也成为问题;
26 |
27 | 另外,如果FSM没有设计死锁保护,车辆可能会陷入某种死锁状态。
28 |
29 | ## **三、动作规划**
30 |
31 | 是指通过规划一系列执行动作以达到某种目的(如避障)的处理过程。通常来说,有两个指标可用来考量动作规划算法的性能:计算效率(Computational Efficiency)和完整性(Completeness)。计算效率即完成一次动作规划的计算处理效率,动作规划算法的计算效率在很大程度上取决于配置空间(Configuration Space)。如果一个动作规划算法能够在问题有解的情况下在有限时间内返回一个解,并且能在无解的情况下返回无解,那么就称该动作规划算法是完整的。
--------------------------------------------------------------------------------
/2.4 自动驾驶仿真/知乎:孙工/自动驾驶虚拟仿真测试介绍(1):是什么.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶虚拟仿真测试介绍(1):是什么 - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/144732954)
2 |
3 | *“ 本系列尝试从是什么、为什么、用什么测、怎么测和谁来测等方面来介绍什么是自动驾驶虚拟仿真测试。这是第一篇,介绍什么是自动驾驶仿真测试。”*
4 |
5 | ## 一、引子
6 |
7 | 说到仿真测试大家可能会觉得陌生,不过其原理其实已经被广泛采用。
8 |
9 | 比如李雷想要开车从北京去上海,但是不知道需要多长时间,于是他做了这样的估算:
10 |
11 | 北京到上海距离s=1200km,开车时速v=120km/h,那么需要的时间为t=s/v=10h;考虑到不是全程高速、中间可能会休息,假设平均时速v’=80km/h会更合理,于是需要的时间为t=s/v’=15h。
12 |
13 | 
14 |
15 | 通过这个例子,我们可以体会到两点:
16 |
17 | 1. 仿真即是通过一组公式模仿真实世界,或者说使用一个数学模型简化替代真实世界;
18 | 2. 数学模型的复杂度越高,计算结果与真实世界越相近,但是建模难度越高、计算速度越慢。
19 |
20 | ## 二、自动驾驶汽车的仿真测试的不同手段
21 |
22 | 我们首先考虑真实世界的情况,自动驾驶汽车在开放道路进行测试时,可以用下图来表示:
23 |
24 | 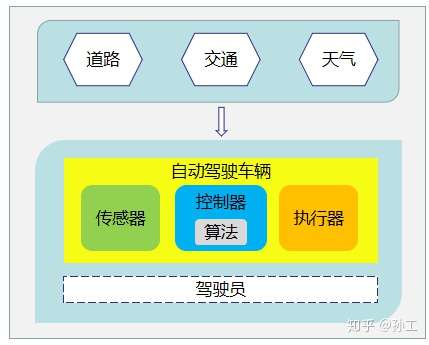
25 |
26 | 自动驾驶车辆主要由传感器、控制器和执行器构成(当然这主要是指自动驾驶部分,车身、底盘等传统车辆部分暂且不提),驾驶员驾驶车辆在不同的道路、交通和天气环境下接受测试。当然高级别的自动驾驶不需要驾驶员,所以图中用虚线表示。
27 |
28 | 当在仿真环境中模拟其中的不同部分时,可以得到仿真测试的不同手段。列举如下表所示:
29 |
30 | 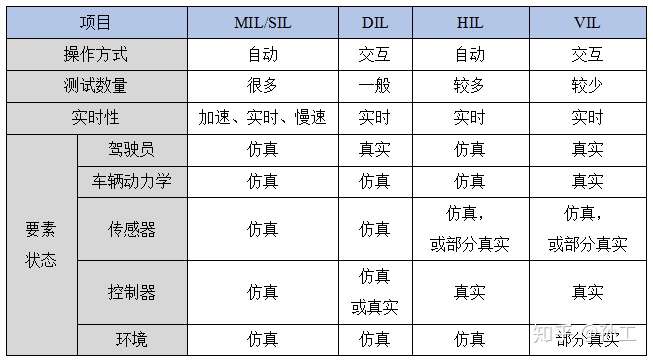
31 |
32 | *注:后面会有一篇详细介绍不同仿真测试手段的区别,敬请关注。*
33 |
34 | ## 三、不同仿真测试手段的选择
35 |
36 | 经常会有人遇到要不要做HIL、要不要买个视频暗箱、要不要买个驾驶模拟器等等疑问,这时如果能先自问自答这样一个问题应该会有所帮助:我们准备测试的被测对象是什么?
37 |
38 | 如果被测对象仅仅是开发阶段的算法,那只使用MIL/SIL就可以;如果被测对象是要在实车使用的控制器,那可能需要一套HIL设备提前进行测试、提前发现问题。如果不采用视频暗箱、雷达回波模拟器等设备就不能实现测试闭环,那此类传感器信号仿真设备也是需要的。
39 |
40 | 诸如此类,如果能时刻谨记被测对象是什么和测试目的是什么,应该对选择仿真测试手段有很大帮助。
--------------------------------------------------------------------------------
/2.4 自动驾驶仿真/知乎:孙工/自动驾驶虚拟仿真测试介绍(2):为什么.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶虚拟仿真测试介绍(2):为什么 - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/144733694)
2 |
3 | *“ 本系列尝试从是什么、为什么、测什么、用什么测、怎么测和谁来测等方面来介绍什么是自动驾驶虚拟仿真测试。这是第二篇,介绍为什么要进行仿真测试。”*
4 |
5 | ## 一、仿真测试是汽车工程师的自然需求
6 |
7 | 仿真测试其实在结构开发领域早已广泛应用。如果说验证一个螺栓强度还可以翻手册、使用公式计算,那么对于一些复杂的零件的强度校核和结构优化,就要借助仿真手段,这就是CAE(Computer Aided Engineering),比如下图中对零件的应力分布计算。CAE手段的使用有效减少了样件的数量,缩短了试验时间,节省了开发成本。
8 |
9 | 
10 |
11 | 这些好处主要是零部件结构开发部门所享受,算法和控制器的开发部门自然很是羡慕。
12 |
13 | 我们可不可以在算法开发阶段就进行测试发现一些低级错误?
14 |
15 | 可不可以在办公室就可以对算法和控制器进行测试,而不是每个版本的新程序都要到实车上测试、在寒冬酷暑的室外调试很久?
16 |
17 | 可不可以在计算机上对真实世界中危险或不易实现的场景进行测试?
18 |
19 | 可不可以在解决bug或算法升版后,对之前的测试场景方便的进行重复测试?
20 |
21 | 欣慰的是,这些需求仿真测试都可以满足。
22 |
23 | ## 二、仿真测试是汽车开发流程的必然要求
24 |
25 | V模型是广泛在软件开发和测试中使用流程,如下图所示:
26 |
27 | 
28 |
29 | V模型要求在开发团队进行不同阶段的开发同时,测试团队编制对应的测试用例,并在开发阶段完成后立即进行测试。这就要求在集成测试、系统测试等暂无完整产品样件的情况下,就开始进行测试。
30 |
31 | 另外,有数据表明,在汽车电控系统的开发过程中,越早发现问题则修正问题的成本越低。在开发的早期,就建立起测试验证的手段,快速高效的发现和解决开发过程中的问题,可以有效减低开发成本、提高开发效率。
32 |
33 | 而在开发的早期进行测试,在暂无完整产品样件的情况下进行测试,就需要仿真手段提供测试环境。
34 |
35 | ## 三、仿真测试是自动驾驶开发的必经之路
36 |
37 | 自动驾驶汽车是一个新生事物,消费者对其安全性还不够信任。那么,自动驾驶汽车的安全性达到什么水平才能被消费者接受呢?我想其安全水平不低于人类驾驶员,应该是一个最起码的要求。
38 |
39 | 根据RAND公司一份名为《Driving to Safety》的报告,要证明自动驾驶汽车相比于人类驾驶员能够减少20%交通事故死亡率,需要进行约80亿公里的公共道路测试,假设由100辆车组成的车队每年365天每天24小时不间歇的以40km/h的平均速度进行测试,大概需要225年。
40 |
41 | 这个测试时间显然是不现实的。就要求在实车测试之外,寻求其他的方法,大幅缩短测试时间。
42 |
43 | 在虚拟环境下进行大规模的仿真测试,成为了必须选择的方法。比如waymo公司的CarCraft仿真平台中,有25000台仿真车辆同时进行测试,每天总计可进行1200万公里的测试。按照这个速度,完成上面提到的80亿公里的测试,仅需要2年。
44 |
45 | 
46 |
47 | ------
--------------------------------------------------------------------------------
/2.4 自动驾驶仿真/知乎:孙工/自动驾驶虚拟仿真测试介绍(3):测什么.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶虚拟仿真测试介绍(3):测什么 - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/144734290)
2 |
3 | ## 一、自动驾驶算法构成
4 |
5 | 一个完整的自动驾驶算法,可以粗略的用下图表示。
6 |
7 | 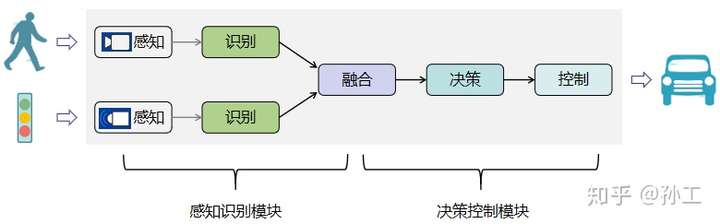
8 |
9 | 传感器的感知模块从真实环境中获取信息,并将其转换为原始信号发送给识别模块;识别模块从原始信号中识别出目标,并发出目标列表。比如摄像头的原始信号为图片数据,激光雷达的原始信号为点云数据,识别模块从中识别出前方目标的类型、位置和速度等信息。
10 |
11 | 融合模块对来自不同传感器的目标列表进行处理后,发出统一的目标列表给决策模块。决策模块分析目标列表,对目标未来的状态进行预测,并规划自车的行驶路径。控制模块根据目标行驶路径,发出加速、制动和转向等控制指令,对车辆状态进行控制。
12 |
13 | 根据上面的分析,大体上可以将一个完整的自动驾驶算法分为两个部分:
14 |
15 | (1)感知识别模块,其输入是外部环境,输出是目标列表;
16 |
17 | (2)决策控制模块,其输入是目标列表,输出是对车辆的控制指令。
18 |
19 | ## 二、自动驾驶仿真测试的两个阶段
20 |
21 | 远期的目标,自然是对完整的自己驾驶算法进行仿真测试,不过考虑到近期的实际情况,大致要分为两个发展阶段(当然这两个阶段可能并没有明显的时间界限)。
22 |
23 | (1)阶段一:
24 |
25 | 在试验室和封闭试验场内对传感器的感知识别模块进行测试,在虚拟仿真环境对决策控制模块进行测试,仿真环境直接向决策控制模块提供目标列表。
26 |
27 | 这主要是因为目前对传感器的建模还有很多局限,从而不能进行有效(甚至是正确)的仿真。比如摄像头输出的图片较容易仿真,但是污渍、强光等特性仿真难度较大;而对于毫米波雷达如果建立精度较高的模型,计算速度较慢,不能满足仿真测试的需求。
28 |
29 | 在试验室和封闭试验场可以对测试环境进行完整的控制和数据记录。比如布置不同类别、位置和速度的行人和车辆,甚至可以对雨、雪、雾和强光的环境要素进行模拟,并将传感器处理输出的目标列表与真实环境进行对比,从而给出对感知识别模块的评估结果和改进建议。
30 |
31 | 这么做的好处是,在传感器建模有很多局限的情况下,依然能够在仿真环境下对决策控制模块进行测试,提前享受仿真测试的优势。
32 |
33 | (2)阶段二:
34 |
35 | 在虚拟仿真环境进行高精度的传感器建模,从而对完整的自动驾驶算法进行测试。
36 |
37 | 这样不仅可以在同一环境下进行测试,从而提高测试效率、测试场景覆盖率和复杂度;而且可以对一些基于AI的算法进行端到端的测试。
38 |
39 | 这一阶段的难点,一方面是前面提到的满足测试需求的传感器建模,另外一方面是不同传感器厂家和OEM厂家直接交互的接口很可能不一致(有些情况下可能并不存在)。
--------------------------------------------------------------------------------
/2.4 自动驾驶仿真/知乎:孙工/自动驾驶虚拟仿真测试介绍(5):怎么测.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶虚拟仿真测试介绍(5):怎么测 - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/149811305)
2 |
3 | ## 一、较低等级和较高等级自动驾驶的测试差异
4 |
5 | 较低等级(L1L2)的自动驾驶或者说ADAS,与较高等级(L3-L4)自动驾驶相比,有个直观上比较大的区别是:较低等级的自动驾驶面对的工况复杂度和工况范围比较小,或者说由于驾驶行为的主要由人类驾驶员负责,自动驾驶系统仅需处理有限数量的、确定的工况即可;而较高等级的自动驾驶,驾驶行为主要由自动驾驶系统负责,其处理的工况复杂度和工况范围很大,甚至不能提前预知。这种对比,可以用下图做一个示意:
6 |
7 | 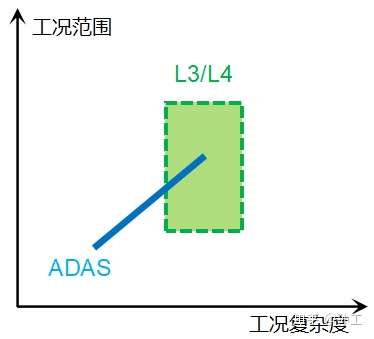
8 |
9 | ADAS用一个较窄的矩形表示,高等级自动驾驶用一个较大的矩形表示。基于两者的这个差异,ADAS可以使用基于用例的测试方法较好的进行测试,而高等级自动驾驶则需要使用基于场景的测试方法。
10 |
11 | ## 二、基于用例和基于场景的测试
12 |
13 | 基于用例的测试方法,即是预设测试输入和测试过程,通过查看被测算法是否实现预期的功能来评价是否通过测试。比如对ACC的测试,预先设定被测车辆和前车的初始车速,以及前车减速的时刻和减速度,查看被测车辆是否能够跟随减速停车。
14 |
15 | 基于场景的测试方法,即是预设测试输入,但不预先设定测试过程,只设定交通车辆的行为,给予被测算法较大的自由度,通过查看被测算法是否达成预期的目标来评价是否通过测试。比如对直线道路行驶的测试,预先设定被测车辆和前车的初始车速,以及前车减速的时刻和减速度,但是不限定被测车辆是通过减速还是换道超车的方式避免与前车相撞。
16 |
17 | 造成对于不同等级的自动驾驶功能需要使用不同的测试方法的一个原因是:低等级的自动驾驶一般能够分解为简单而独立的功能,可以把单一功能作为被测对象;而高等级的自动驾驶较难分解成简单而独立的功能,只得把整个自动驾驶系统或其相对较大的一部分作为被测对象。
18 |
19 | ## 三、测试场景的来源
20 |
21 | 若想对自动驾驶功能进行较全面的测试,就需要得到尽可能全面覆盖其真实运行工况的测试场景。为获得这些测试场景,大体上可以有两种思路:
22 |
23 | 第一种思路是:①通过真实道路数据采集和理论分析等方式,得到不同的场景类型(即功能场景),②再分析出这些不同场景类型中的关键参数,并通过真实数据统计和理论分析等方法得到这些关键参数的分布范围(即逻辑场景),③最后选取其中一组参数的取值作为一个测试场景(即具体场景)。如下图所示:
24 |
25 | 
26 |
27 | 第二种思路是:采集自动驾驶车辆预定工作区域内的交通流量数据,并将这些数据输入交通仿真工具中产生交通流,并使用该交通流充当自动驾驶车辆的周围交通车辆,实现测试场景的自动生成。
--------------------------------------------------------------------------------
/2.4 自动驾驶仿真/知乎:孙工/自动驾驶虚拟仿真测试介绍(6):谁来测.md:
--------------------------------------------------------------------------------
1 | - [自动驾驶虚拟仿真测试介绍(6):谁来测 - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/149812918)
2 |
3 | 对照《用什么测》和《怎么测》中的描述,完整的自动驾驶仿真测试可以分为仿真工具开发、仿真工具集成、测试场景开发和仿真测试执行等工作,如下图:
4 |
5 | 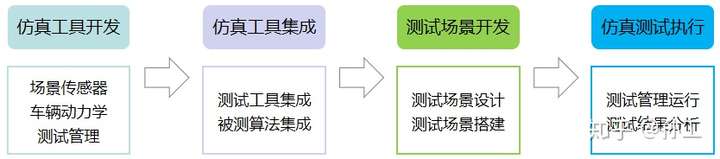
6 |
7 | ## 一、仿真工具开发
8 |
9 | 由于仿真工具开发难度较大,且模块的功能有较明显分隔,目前仿真工具一般由多家公司提供。比如VTD、PreScan是常用的场景和传感器模仿真软件,CarSim是常用的车辆动力学仿真软件,ECU-TEST是常用的测试管理工具。
10 |
11 | 仿真工具开发需要跨领域的能力。比如激光雷达传感器的开发,不仅要求对激光雷达工作原理的理解,而且需要对应的编程开发能力,初步开发完成后还需要真实激光雷达试验数据的对标调整。而这种跨领域的能力,可以通过不同领域人才的合作,也可以通过拥有跨领域的人才来提供。
12 |
13 | 从事仿真工具开发的公司一般为乙方,技术积累较深厚,目前主要为国外企业,特别是德国和美国企业居多。近些年也有一些国内公司涉及,比如51Sim-One、PanoSim和Hirain TAE。另外,一些互联网背景的自动驾驶公司也在开发自己的仿真工具。
14 |
15 | ## 二、仿真工具集成
16 |
17 | 仿真工具集成包含两个方面的工作:(1)根据测试需要选择合适的测试工具并将其集成为完整的仿真测试环境;(2)将被测算法与仿真测试环境集成,实现闭环测试。
18 |
19 | 第一方面工作的难点在于:(1)市场上的测试工具种类较多,哪个能满足测试需求?(2)这些测试工具多是由不同公司开发的,在将其集成到一起时,相互之间的数据接口需要定制化开发。
20 |
21 | 第二方面工作的难点在于:(1)现成的工具与被测算法的数据接口也不一致,在定制化开发通信接口的过程中,既需要创造性的思考,也需要步步为营的调试。(2)如何能够保证仿真环境与真实环境的相似度,比如传感器的信号是否与真实情况一致、车辆动力学模型的响应是否与真实车辆一致?
22 |
23 | 从事仿真工具集成工作的公司一般为乙方,其为不同甲方提供解决方案、使用不同仿真工具的过程,为其解决相似问题提供了宝贵经验、降低了成本。目前该领域的集中度较高,但也不断有创业公司进入,竞争较为激烈。
24 |
25 | ## 三、测试场景开发
26 |
27 | 在前面的《怎么测》中提到了针对高等级自动驾驶的测试方法要从测试用例向测试场景转变,也提到了测试场景的来源。测试场景开发工作的一个关键问题是:如何保证仿真测试的场景覆盖度?或者算法在仿真环境进行了1000万个场景、1000万公里的后,我们可以有多大信心在真实世界的同样场景下进行自动驾驶?
28 |
29 | 这需要针对自动驾驶算法的设计运行域详细而系统的进行测试场景的设计。充分考虑道路、周围车辆的位置和运动、传感器感知局限和自车状态等等不同方面的影响。
30 |
31 | 在场景设计完成后,需要在仿真环境下搭建。这可能是一个枯燥的工作,但是在考虑是否能够自动生成、如何避免手工搭建的错误等等内容时,亦需要智慧的思考。
32 |
33 | 这部分工作一般需要算法开发公司(可能是整车厂,也可能是其供应商)的测试团队来完成,并与算法开发团队密切沟通。对于相关技术薄弱的公司,也可能找供应商来提供测试服务。
34 |
35 | ## 四、仿真测试执行
36 |
37 | 仿真测试执行包含两个方面的工作:(1)对测试场景库的维护和针对不同算法或功能合适的测试场景进行运行测试;(2)在测试完成后,整理并提供清晰的测试报告,并提供测试结果的统计数据,为算法团队的改进提供有效支撑。
--------------------------------------------------------------------------------
/2.4 自动驾驶仿真/知乎:孙工/虚拟仿真测试介绍(7):MIL、SIL、PIL和HIL是个啥.md:
--------------------------------------------------------------------------------
1 | - [虚拟仿真测试介绍(7):MIL、SIL、PIL和HIL是个啥 - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/156854116)
2 |
3 | ## 一、基于模型的设计
4 |
5 | 基于模型的设计方法(MBD,Model Based Design)采用图形化设计和自动化代码生成,不同于基于手工编程和纸上规范的传统编程方法,具有如下优点:
6 |
7 | (1)在统一的开发测试平台上,允许从需求分析阶段就开始验证,并做到持续不断的验证与测试;
8 |
9 | (2)产品的缺陷暴露在产品开发的初级阶段,开发者把主要精力放在算法和测试用例的研究上,嵌入式代码的生成和验证则留给计算机去自动完成;
10 |
11 | (3)大大缩短了开发周期与降低开发成本。
12 |
13 | 基于模型的设计方法的不同阶段,分别采用MIL/SIL/PIL/HIL等测试方法,有效的对嵌入式代码进行测试和验证。其中:
14 |
15 | MIL,Model in the Loop:模型在环测试;
16 |
17 | SIL,Software in the Loop:软件在环测试;
18 |
19 | PIL,Processor in the Loop:处理器在环测试;
20 |
21 | HIL,Hardware in the Loop:硬件在环测试。
22 |
23 | ## 二、MIL、SIL、PIL和HIL介绍
24 |
25 | 假设我们现在要开发一款AEB控制器:
26 |
27 | **(1)MIL**
28 |
29 | 假设我们已经在支持MBD的工具(如Simulink)中,使用图形化的方法开发出了AEB的算法,现在想要验证该算法是否满足要求,那么我们需要开发一个(或是有现成的其他工具)被控对象模型,在这里例子里是一个车辆模型。将控制算法和车辆模型连接起来,形成闭环,并变换输入和车辆模型状态,来对控制算法的功能进行测试。如下图所示:
30 |
31 | 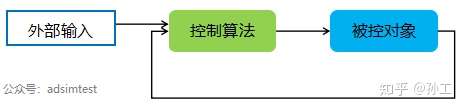
32 |
33 | **(2)SIL**
34 |
35 | 现在我们将Simulink中开发的算法自动生成为c代码。但是由于代码自动生成工具本身的原因或者代码生成工具没有正确设置或者其他未知原因,自动生成代码过程可能会引入一些错误。所以我们需要验证自动生成的代码与算法模型的一致性,这就是SIL测试。SIL测试使用与MIL相同的测试用例,查看对于相同的测试用例,查看其输出是否与MIL阶段一致。为了测试的高效性,有时甚至不接入被控对象模型,而是对算法模型和生成代码进行相同的输入,查看输出是否一致。如下图所示:
36 |
37 | 
38 |
39 | **(3)PIL**
40 |
41 | 将自动生成的代码编译为目标处理器需要的形式,并下载到目标处理运行,为了防止编译过程引入新的错误,此时需要进行PIL测试。PIL测试也是等效性测试,其方式与SIL类似,不同之处是编译好的算法运行在目标处理器上,SIL测试是在算法开发环境进行的(如windows)。
42 |
43 | **(4)HIL**
44 |
45 | 在开发出完整的控制器后,有时被控对象(整车)还未完成开发;有时使用真实被控对象进行测试太危险或成本高:出于这些不同的原因,采用真实控制控制器和虚拟被控对象的HIL测试常常被使用。如下图所示:
46 |
47 | 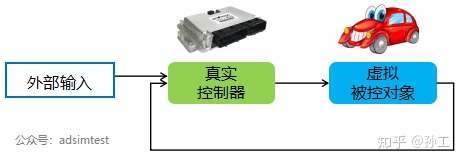
48 |
49 | ## 三、总结
50 |
51 | 四种测试方法各自的特点如下表所示:
52 |
53 | 
54 |
55 | 最后谢谢您宝贵的正激励和正反馈!
--------------------------------------------------------------------------------
/3.1 智慧城市/3S 大数据和城市大脑赋能的智慧城市精细化管理.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
--------------------------------------------------------------------------------
/3.1 智慧城市/亿信华辰的3D智慧城市大屏解决方案.md:
--------------------------------------------------------------------------------
1 | # 亿信华辰的3D智慧城市大屏解决方案
2 |
3 | 
4 | **慧眼:让数据流动起来**
5 | 智慧城市体系下,数据复杂多样是肯定的。然而不同系统、不同系列中有很多数据和指标都是具有相关性的,且多个有关联关系的指标在某些因素的相互影响下,特定数据也会发生变化,合理运用联动即可一目了然各数据指标之间的变化可快速定位问题,提高后续应对效率。比如,城市中的人口、单位、建筑、车辆、轨迹、污染物、生态等数据,随着人口的流动其他数据均会发生变化,通过酷屏的展示这些数据变得灵活而流动。
6 |
7 | 除了联动之外,酷屏还具备钻取的数据分析功能。钻取一般是用于进一步分析,改变维的层次,变换分析的粒度。以今年的新冠疫情为例,我国最严重的疫区是湖北,从湖北省往下钻,可以分析到省里各个市,而在患者最多的武汉,我们还可以继续下钻以区为单位进行分析,以此类推甚至可以分到到具体的街道小区门栋,抽丝剥茧般的梳理,能让我们逻辑清晰,条理清楚,并通过最直观的视觉展示形式展现出来。
8 | 
9 | 另外,酷屏具有很强的扩展性和灵活性,可根据不同的业务需求进行定制化设计。剔除繁琐的更新步骤,提供丰富的二次开发接口,组件化开发,为实施人员提供便利。
10 |
11 | **美瞳:让数据精致起来**
12 | 酷屏不光是一双慧眼,拥有强大的计算能力和分析力,它还被赋予了缤纷美丽的色彩和形态多样的表达。酷屏内置近百种风格各异的表格、导航、统计图等组件及3D、SVG特效可供用户选择,最终给人震撼精致的视觉体验。
13 | 
14 | 如上述地图所呈现的是一个带科技感风格的3D城市实景,用户可点击图中的重点建筑查看其需要呈现的数据。我们在设计时充分考虑了用户的观感,将城市环境和轨道交通页面效果图紧密结合,添加河对岸的配楼让画面更加饱满,让用户仿佛置身其中,在大屏中完美的呈现数据的可视化效果。
--------------------------------------------------------------------------------
/3.1 智慧城市/华为智慧城市之智能运行中心 (IOC).md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
--------------------------------------------------------------------------------
/3.1 智慧城市/城市大脑 领航智慧城市新未来.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | # 城市大脑的定义与理解
8 |
9 | 
10 |
11 | 
12 |
13 | # 城市大脑建设方案建议
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
--------------------------------------------------------------------------------
/3.1 智慧城市/城市大脑让智慧城市更智慧.md:
--------------------------------------------------------------------------------
1 |
2 |
3 | 
4 |
5 | 
6 |
7 |
8 |
9 | 
--------------------------------------------------------------------------------
/3.1 智慧城市/城市应急指挥平台方案.md:
--------------------------------------------------------------------------------
1 | # 一、平台定位
2 |
3 | 应急平台基于现代公共安全理念和技术,运用大数据、物联网、云计算、移动定位 互联等IT技术的公共安全管理和应急指挥平台,定位于:
4 |
5 | (一)指挥调度平台,快速汇总事件信息和了解现场情况,快速启动预案协调指挥相关部门和相关资源,实现应急高效处置;
6 |
7 | (二)决策支持平台,运用突发事件科学模型研判事态发展,为领导提供决策参考;
8 |
9 | (三)风险管理平台,登记掌握风险源危险源情况 ;
10 |
11 | (四)公共安全大数据平台,管理掌握公共安全基础信息和应急资源等;
12 |
13 | # 二、应用体系
14 |
15 | 政府应急平台组成上可以概括为“五层两翼”结构“五层”依次为指挥场所、基础支撑系统、数据库系统;应用软件系统以及信息交互展示构成;“两翼”是指系统建设必须遵循的法律法规、标准规范和安全保障体系。
--------------------------------------------------------------------------------
/3.1 智慧城市/沧州市智慧城市-城市大数据中心建设项目需求规格说明书/2.项目概要.md:
--------------------------------------------------------------------------------
1 | 备注:原文档在网盘
2 |
3 | # 第二章 项目概要
4 |
5 | ## 2.1 项目背景及目标
6 |
7 | ### 2.1.1 建设背景
8 |
9 | 2013 年,沧州市政府就已明确“智慧城市”发展方向和信息化需求,通过完善城市规划,为“智慧城市”的基础建设预留空间;协调各信息化主体关系,化解信息化推进过程的管理障碍; 通过进一步加强“智慧城市”信息化基础建设,为智慧城市建设奠定了坚实的基础。
10 |
11 | 2015年 10月,沧州市政府委托国内知名专家规划制定了《沧州市智慧城市建设顶层设计》,以国家智慧城市试点建设为契机,综合运用物联网、云计算、大数据等现代科学技术手段,发挥沧州市资源、港口、交通、特色文化及产业经济优势,通过 3-5 年努力,完善城乡基础设施,促进资源共享,实现基础设施智能化;建立完善的现代城市管理、产业融合发展体系,创新城市管理与发展,提升城市管理水平;以人为本,提升公共服务水平,促进社会事业进步与发展,城乡人民物质文化生活水平显著提高;遵循“优一强二增三”的产业发展思路,做强支柱产业, 培育发展战略性新兴产业和现代服务业,
12 |
13 | 促进产业结构调整, 提升提高经济发展水平; 形成智慧城市运营和服务体系, 保障城市人口、 经济、资源、环境和社会全面协调可持续发展。
14 |
15 | 2017 年 9 月,沧州市委、市政府成立了沧州市统筹推进信息化建设领导小组,统筹推进全市信息化建设工作,促进数据资源整合、共享、开放,提高社会治理能力和公共服务水平, 同时推进我市实体经济数字化, 推动网络信息技术产业健康快速发展。
16 |
17 | 2017 年,沧州市委市政府先后出台一系列政策文件,推动全市信息化建设和信息产业发展,加快沧州市城市大数据中心建设正是进一步推进新型智慧城市建设,落实市委市政府决策的有力抓手。
18 |
19 | ### 2.1.2 建设目标
20 |
21 | 按照党中央、国务院决策部署,牢固树立和贯彻落实创新、协调、绿色、开放、共享的发展理念。通过城市大数据中心的建设,促进简政放权、放管结合、优化服务、改革措施落地;促进规范行政权力运行、优化政务服务供给,降低制度性交易成本, 解决影响企业和群众办事创业的难点堵点;
22 |
23 | 促进网上政务服务运行规范、程序严密、过程透明、结果公开、监督有力,切实增强政务服务的主动性、精准性和便捷性,为推进政府治理创新提供有力数据支撑和保障。
24 |
25 | 本项目要实现以下两个目标: 一是通过沧州市城市大数据中心统筹沧州市信息资源管理,实现城市信息资源的有效整合与集成,推进沧州市信息资源交换、共享、整合及服务,为各行业智慧应用系统提供全面、及时、准确的信息服务,满足政府管理、 企业生产经营和居民生活对信息资源的需求。
26 |
27 | 同时,将满足各业务垂直部门与上级主管部门系统间的互联互通需求。
28 |
29 | 二是智慧城市与共享交换平台将全面整合与之相关的各行业的智慧化应用系统, 将其业务、 数据、流程进行全面的融合,为企业和市民提供融合、专业化的政务与智慧城市应用服务。
30 |
31 | 沧州云计算产业定位为沧州市人民政府重点投入和发展的战略新产业, 致力于构建和打造云计算产业可研投入、 运营服务、基础设施配套三位一体的产业集群。本项目建设内容依托于沧州市云计算产业基地, 充分利用已有的云环境部署沧州城市大数据中心的各平台、各系统,实现统一规划,统一指导;统一协同,资源共享;安全可靠,高效易用;并存过度,逐步整合的建设原则和策略。
32 |
33 | ## 2.2 使用该系统的用户角色
34 |
35 | 
--------------------------------------------------------------------------------
/3.1 智慧城市/烟台:为城市安全发展装上“智慧大脑”.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
--------------------------------------------------------------------------------
/3.1 智慧城市/规范标准要求/新型智慧城市评价指标(2016 年) .md:
--------------------------------------------------------------------------------
1 | 新型智慧城市评价指标(2016 年) :http://scdrc.sic.gov.cn/archiver/smartercity/upfile/files/default/20161213181014666090.pdf
2 |
3 | # 一、总体说明
4 |
5 | (一)指标构成。本指标共包含8 项一级指标,21 项二级指标,54 项二级指标分项。
6 | (二)评价方法。评价采取百分制,总得分满分为100 分。总得分为各一级指标得分之和。各级指标得分为其下层指标得分之和。计算时各分值保留2 位小数。
7 | (三)指标权重。各级指标设置相应的权重。一级指标权重为其各二级指标权重之和,二级指标下的各分项权重之和为100%。
8 |
9 | # 二、评价指标
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/1. 车路协同高速解决方案/车路协同下高速公路运行态势监测方法.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | # 1 车路协同下高速公路运行态势的监测评估模型
6 |
7 | 为修正以往高速公路运行态势监测与评定方法,本文提出了一种综合数据主观性与交通参与者客观性的新方法来监测高速公路运行态势.该方法首先根据高速公路交通事故时空分布特性,获得运行态势的监测指标,利用嘀值法确定对应权重,进而采用量化理论建立车路协同下高速公路运行态势监测模型,最终得到运行态势综合监测值.
8 |
9 | ## 1.1 监测指标体系
10 |
11 | 从交通管理的实际需求出发,在深入研究交通状态的数据获取、评估的基础上,形成高速公路运行态势监测指标体系.遵循系统性、动态性、代表性原则,选择最能表征运行态势特性的车、路、环境3个指标进行分析.根据实时交通信息以及交通事故分布特性,进一步细分监测指标,如表1所示.
12 |
13 | 
14 |
15 |
16 |
17 | ## 1.2 监测模型
18 |
19 | 
20 |
21 | 1)确定监测指标的考察值及标准化处理.通过构造关联函数将各监测指标进行标准化处理,统一变化到[0,1]范围内.本文对车路协同下高速公路运行态势监测的定量指标进行无量纲化处理.对定性指标则采用模糊语言来量化处理,主要采用等级量化来界定其值.
22 |
23 | 2)界定监测指标的权重系数.针对决策者对各监测指标的不同重视程度,以及各指标在决策过程中传输给决策者的不同信息,采用瘢值法来确定权重系数.
24 |
25 | 
26 |
27 | # 2 高速公路运行态势的等级界定
28 |
29 | 为了得到高速公路运行态势监控科学合理的监测结果,将运行态势监控结果界定为5个级别,采用模糊语言来界定区间级别.
30 | 1)区间界定函数.依据模糊语言处理准则,构建等级区间的语言类模糊数集,车路协同下高速公路运行态势的区间函数关系为
31 |
32 | 
33 |
34 | 
35 |
36 | 
37 |
38 | 
39 |
40 | 
41 |
42 | 江苏省境内 19 条高速公路运行态势属于二级和三级,即较安全和一般,符合江苏省高速公路实时运行情况( 见江苏交通出行网实时路况查询) .
--------------------------------------------------------------------------------
/3.2 智慧高速/1. 车路协同高速解决方案/高速公路车路协同雷达跟踪路况感知系统浅析.md:
--------------------------------------------------------------------------------
1 | # 高速公路车路协同雷达跟踪路况感知系统浅析
2 |
3 | 张文斌,党奇志 河北省交通运输厅公路管理局
4 |
5 | 摘要:多目标雷达跟踪感知系统是车路协冋攴持车辆自动驾駛技术快速落地的路侧重要基础设葹,可直接感知道路区段车辆位置、速度、方向、交通流数据、异常事
6 |
7 | 件等信息,通过车路协冏通信技术为自动驾驶车辆禔供髙可靠的交通信息,提升自动驾驶车輛的周边路况感知能力。
8 |
9 | 关键词:车路协同;雷达跟踪感知;髙清车牌识别
10 |
11 | # 一、雷达跟踪路况感知系统概述
12 |
13 | 道路实时感知是实现智能交通体系的基础,基于雷达连续跟踪检测、车牌髙清识别以及两者融合技术,可实现全时域、全环境状态下的精准、全量交通感知体系,通过
14 |
15 | 云计算、大数据等手段实现路况信息的预警、预测和预判,如图1、图2所示。
16 |
17 | 
18 |
19 | 围绕“改善交通流监测、车路信息交互与控制、风险预警”三大方向,以交通设施数字化为理念,融合路网感知、路网控制、智能决策,完善并提升路网路侧设施体系,集多种探测感知手段于一体的长距多目标雷达跟踪路况感知系统应运而生。
20 |
21 | 雷达跟踪路况感知系统具有良好的远距离、大范围探测能力和交通态势感知能力,具有极低的误报率。
22 |
23 | 单个雷达可以将1km范围内检测区域的车辆信息,包括车辆位置、速度、方向等状况快速告知路侧设施,进行车路信息交互、风险监测及预警、交通流监测分析等,保障交通安全、高效和绿色出行。
24 |
25 | 目前,多目标雷达感知系统已应用于河北延崇高速。
26 |
27 | # 二、系统构成
28 |
29 | 长距多目标雷达跟踪路况感知系统由布设在路侧的雷达检测传感器、雷达数据分析仪和部署在路段中心的雷达服务器、雷达图形工作站以及雷达交通分析应用软件组成,如图3所示。
30 |
31 | 长距多目标雷达跟踪传感器、数据采集分析处理器、雷达服务器和雷达图形工作站均拥有独立的P地址。
32 |
33 | 长距多目标雷达跟踪传感器通过通信专网或5G网络,连接至高速公路沿线雷达数据分析仪雷达数据分析仪通过网络连接至监控分中心雷达服务器和雷达图形工作站,分析车辆行驶状况或轨迹,并将结果推送绐车路协同指挥平台,进行视频控制、车路信息等联动。
34 |
35 | # 三、触角功能
36 |
37 | 长距多目标雷达跟踪路况感知系统在获取高速公路纵向区段交通流量的同时,可跟踪毎条车道上车辆的运行状况(车速、车型、行驶车道、方向等信息),直接翰出道路拥挤度状态,具备交通异常事件发现能力,主要功能如图4所示。
38 |
39 | 
40 |
41 | (1)雷达跟踪检测器不受各类恶劣环境和光线等因素干扰。可全天候不间断无障碍对道路状况、交通流量进行实时检测和信息输出。
42 |
43 | (2〕雷达跟踪感知系统可精准地对道路区段运行状况进行直接检测,提供道路交通流参数、道路车辆实时分布情况和拥堵情况可直接显示在GS地图上,并以图形方式展现道路拥挤度畅通、基本畅通、轻度拥堵、中度拥堵和严重拥堵)。
44 |
45 | (3)长距多目标雷达检测器可扫描1km范围內的车辆停驶、非队、逆行,以及抛洒散落物、行人等交通异常事件,不受恶劣环境和光线干扰,可有效解决视频事件检测系统误报率高、检测清度低等问题;
46 |
47 | (4)雷达路况跟踪感知系统具备车辆定位功能,能够直接输出精准经纬度信息传递给快速球形摄像机,在发现异常事件时,通过视频控制平台自动锁定事件目标,通过视频快速确认事场。
48 |
49 | (5)雷达检测器可分车道触发高清卡口识别摄像机,将卡口识别摄像枳所采集的车牌、车型和车身颜色信息与雷达检测车辆信息融合叠加,实现对车辆信息的准确定位、跟踪、溯源等;
50 |
51 | (6)长距多目标雷达跟踪检测器能够同时跟踪扫描道路上不少于580个目标物体,实现精准定位,定位精度小于25cm,可提供每一辆车的实时交通状态:实时速度、行驶方向、经纬度、ID号、尺寸、车型等信息,通过车路协同系统可为车辆自动驾驶、队列驾驶等提供重要数据支撑和安全保障。
--------------------------------------------------------------------------------
/3.2 智慧高速/3. 参考解决方案/中国移动/车路协同V2X智慧交通解决方案 .md:
--------------------------------------------------------------------------------
1 | # 一、高速公路场景
2 |
3 | 
4 |
5 |
--------------------------------------------------------------------------------
/3.2 智慧高速/3. 参考解决方案/千寻位置-智慧高速解决方案.md:
--------------------------------------------------------------------------------
1 | # 智慧高速解决方案
2 |
3 | 千寻位置可以为高速公路提供云、端、路一体化智能管控解决方案,赋能高速公司道路设施智能化、调度管理智能化、道路监管智能化、收费智能化。
4 |
5 | 
6 |
7 | # 方案架构
8 |
9 | 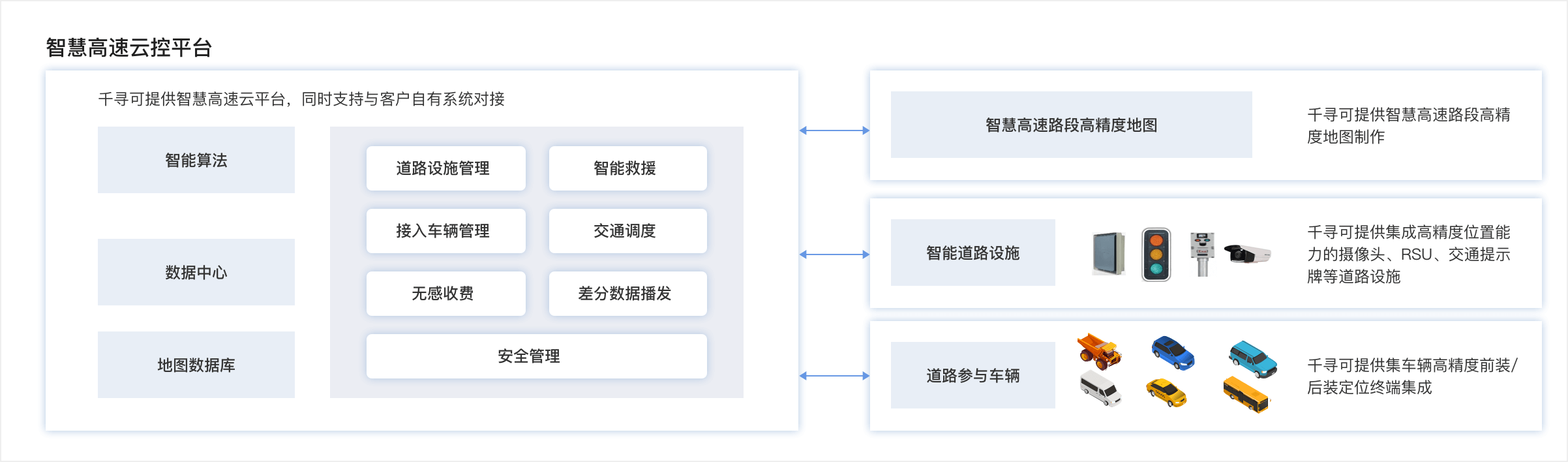
--------------------------------------------------------------------------------
/3.2 智慧高速/3. 参考解决方案/数字冰雹-智慧高速大屏可视化决策.md:
--------------------------------------------------------------------------------
1 | - [智慧高速大屏可视化决策系统](https://www.bilibili.com/video/BV1JK4y1a7r5)
2 |
3 |
4 |
5 | # 工程建设进展
6 |
7 | 
8 |
9 |
10 |
11 | # 重点项目展示
12 |
13 | 
14 |
15 |
16 |
17 | # 重点项目展示-桥梁
18 |
19 | 
20 |
21 |
22 |
23 | # 工地党建管理
24 |
25 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/4.1 参考资料/华为云高速公路行业华为云高速公路行业.md:
--------------------------------------------------------------------------------
1 | - [华为云高速公路行业华为云高速公路行业]((https://res-static.hc-cdn.cn/cloudbu-site/china/zh-cn/solution/Highway-Video-cloud.pdf))
2 |
3 | ## 高速视频云联网:路网感知基础
4 |
5 | 
6 |
7 | ## 高速公路视频云解决方案架构
8 |
9 | 
10 |
11 | ## 华为云省级视频云联网部署架构
12 |
13 | 
14 |
15 | ## 核心能力
16 |
17 | 
18 |
19 | ## AI算法:高速公路异常事件检测
20 |
21 | 
22 |
23 | ## 边云协同:基于IEF智能边缘平台实现智能协同和业务持续创新演进
24 |
25 | 
26 |
27 | ## 大数据平台:视频云联网平台的价值呈现
28 |
29 | 
30 |
31 | ## 公众服务:面向公众共享准实时的路况视频,精准出行诱导提升效率
32 |
33 | 
34 |
35 | ## 智慧监测:视频全量数字化,智能化,实时分析,构筑智慧高速数据底座
36 |
37 | 
38 |
39 | ## 交通预测:预测未来,提前筹划
40 |
41 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/4.1 参考资料/智慧高速公路建设指南(总体框架、应用建设要求).md:
--------------------------------------------------------------------------------
1 | - [智慧高速公路建设指南(总体框架、应用建设要求)](https://mp.weixin.qq.com/s/q936sjTT5kSjf86ZlWk_jA)
2 |
3 | 智慧高速公路是指在高速公路沿线布设相应设施设备并建有交通运行控制中心,集成应用传感、通信、信息、云计算、大数据、人工智能和绿色能源等先进技术,实现汽车更加安全、快速和绿色行驶的高速公路。 云南省交通运输厅发布了《云南省智慧高速公路建设指南(试行)》(2022年版),规定了智慧高速公路总体框架、智慧化等级及应用配置、支撑型应用建设要求、业务型应用建设要求和创新型应用建设要求。指南规定了:
4 |
5 | **1、智慧高速公路总体框架**
6 |
7 | 智慧高速公路总体框架由行业管理体系、企业运营体系、建设技术体系、交互机制及信息安全保障构成。
8 |
9 | 
10 |
11 | 智慧高速公路行业管理体系是以交通运输行业主管部门为主体,为更好发挥智慧高速公路建设的统筹协调、支撑引导作用,以行业数据为支撑,以科学决策为目的,组织建立涵盖机构设置、职能划分及运行协同机制的管理体系。 智慧高速公路企业运营体系是以公路运营企业为主体,以精细化管理、降本增效、优质服务为目标,依托数字化、多网融合、智能化应用等手段,组织建立的涵盖机构设置、业务划分及运行协同机制的运营体系。 智慧高速公路建设技术体系是为实现智慧高速公路建设目标,面向全要素感知、全方位服务、全业务管理、支撑及保障、创新应用技术等方向,约定的技术体系架构,形成的智慧高速建设技术体系。
12 |
13 | 
14 |
15 | **2、高速公路智慧化等级及应用配置。**
16 |
17 | 见正文。
18 |
19 | 
20 |
21 | **3、支撑型应用建设要求**
22 |
23 | 
24 |
25 |
26 |
27 | **4、业务型应用建设要求**
28 |
29 | 
30 |
31 |
32 |
33 | **5、创新型应用建设要求**
34 |
35 | 
36 |
37 | 以下为云南省交通厅发布的指南全文,供行业参考
--------------------------------------------------------------------------------
/3.2 智慧高速/4.1 参考资料/智慧高速公路技术体系构建.md:
--------------------------------------------------------------------------------
1 | # 智慧高速公路技术体系构建
2 |
3 | 智慧高速公路$ 是在高速公路沿线布设相应设施设备并建有交通运行控制中心,集成应用感知+ 通信+ 控制和绿色能源等先进技术$ 实现汽车更加 安全+ 快速和绿色行驶的高速公路。
4 |
5 | # 智慧高速公路主要特征
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/5. 云控平台/云控平台与智慧高速.md:
--------------------------------------------------------------------------------
1 | - [云控平台与智慧高速](https://wenku.baidu.com/view/c55afcd4588102d276a20029bd64783e08127d72.html)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
32 |
33 | 
34 |
35 |
36 |
37 |
--------------------------------------------------------------------------------
/3.2 智慧高速/5. 云控平台/基于智能边缘计算的高速公路车路协同云控平台系统.md:
--------------------------------------------------------------------------------
1 | - [基于智能边缘计算的高速公路车路协同云控平台系统]
2 |
3 | 专利
4 |
5 | 
6 |
7 | ## 摘要
8 |
9 | 本发明提供基于智能边缘计算的高速公路车路协同云控平台系统,涉及高速公路信息服务技术领域,包括边缘计算单元,所述边缘计算单元的输出端电性连接有路侧单元,所述路侧单元的输出端电性连接有车载单元,所述车载单元的输出端电性连接有车载显示终端,所述车载单元能够获取定位周期内的车辆卫星定位信息,所述路侧单元具备LTE‑V2X PC5和LTE Uu双模通信能力,符合3GPP R14LTE‑V2X协议规范,能够实现设备间直接通信和基于蜂窝网的通信。
10 |
11 | 本发明,通过设置该基于智能边缘计算的高速公路车路协同云控平台系统,降低了车辆定位所需的精度,不需要配置高精度地图,降低了信息服务所需的成本,且使实施起来更加简单,因此在辅助驾驶信息服务方面更具推广应用的价值和前景。
12 |
13 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/5. 云控平台/智慧高速云控平台总体技术要求.md:
--------------------------------------------------------------------------------
1 | # 智慧高速云控平台总体技术要求
2 |
3 | ## 背景和意义:
4 |
5 | 智慧高速建设是推动交通运输高质量发展的必由之路,也是支撑交通强国建设的重要载体。
6 |
7 | 云控平台作为智慧高速建设的重要组成部分,是实现高速公路业务系统内部数据整合及跨机构平台数据共享,并赋能态势感知、应急指挥、养护管理等各项高速公路业务智慧化提升的关键载体。
8 |
9 | 云边协同是最适合高速公路层级式组织管理体系的云控平台架构,但针对云边之间的功能划分仍缺乏深入研究和普遍共识,导致智慧高速云控平台的发展路径不够清晰、应用效果有待提升。
10 |
11 | 本项目旨在以高速公路实际业务需求为牵引,梳理现有相关标准,分析云控平台的技术框架, 细化各层级的功能定位,明确平台整体管理要求,推进智慧高速云控平台标准化进程,进而指导智慧高速云控平台建设、提升实施效果,推动公路路网管理和出行信息服务智能化。特提案此标准。
12 |
13 | ## 范围和主要技术内容
14 |
15 | 本标准规定了智慧高速云控平台的基本要求、平台技术框架、平台基础功能、平台应用服务、
16 |
17 | 平台运行管理要求等内容。本标准适用于指导智慧高速云控平台的设计与实施。
18 |
19 | 本标准主要技术内容如下:
20 |
21 | 1、 智慧高速云控平台的基本要求;
22 |
23 | 2、 平台技术框架:包括整体框架,云中心、边缘侧框架;
24 |
25 | 3、 平台基础功能:包括云中心、边缘侧基础功能;
26 |
27 | 4、 平台应用服务:包括云中心、边缘侧应用服务;
28 |
29 | 5、 平台运行管理要求:包括平台运维管理要求、平台数据存储要求、平台安全防护要求、平台性能要求等。
30 |
31 |
--------------------------------------------------------------------------------
/3.2 智慧高速/7. 两客一危/高速公路两客一危车辆动态监管系统.md:
--------------------------------------------------------------------------------
1 | # 高速公路两客一危车辆动态监管系统
2 |
3 | 陈晓彤,林水生,张筑杰
4 |
5 | **摘要:**近年来,高速公路快速发展,车流量増长迅速,但是交通事故量也不断増多,给社会带来了极大的负面影响,严重威胁到了人们的人身安全。
6 |
7 | 本文以佛山广三高速为背景,主要分析了高速公路两客一危车辆动态监管系统的工作原理,并介绍了系统的构架和功能。
8 |
9 | **关键词:**高速公路;两客一危;动态监管
10 |
11 | 当危险品运输车辆驶入广三高速的电子围栏范围后,平台将相关车辆的所有信息都发送到监控中心。监控中心在获取得车辆的信息之后,对信怠进行处理、计算,最后对高速公路上车辆运行情况作出正确的判断,并将信息反馈给高速公路上行驶的车辆,对车辆进行控制及诱导,当发现存在潜在危险时,及时做出相对应的应急方案。
12 |
13 | 监控中心同时利用主线路面的摄像机对关车辆进行视频监控,如果危险品运输车辆发生交通事故,将自动发出预警信号,并显示事故所在的地理位置,生成临时应急方案,组织救援队对交通事故现场进行处理。
14 |
15 | 监控中心远程协调应急处理,发布事故信息,通知高速公路运行车辆,实现了以最快的速度处置危险品事故,有效降低了次事故的发生和造成的损失。
16 |
17 | 
18 |
19 | # (二)系统功能设计
20 |
21 | ## 1、两客一危车辆信息采集与处理
22 |
23 | 同平台通过cP/P通信进行数据交换,获取所有运行车辆的信息,如车辆基本信息、定位时间、地理位置、方向等。
24 |
25 | 对采集的两客一危车辆动态信息进行报警分析,保存车辆最近上报位置信息,记录车辆运行轨迹。
26 |
27 | ## 2、服务区管理
28 |
29 | 提供髙速公路服务区基本数据的管理功能,包含服务区数管理,包括增加、删除、修改等功能;对服务区设置矩形电子围栏功能。
30 |
31 | 公路服务区主要数据字典包含服务区名称、桩号、服务内容、联系电话、电子围栏。
32 |
33 | ## 3、停靠带管理
34 |
35 | 提供高速公路停靠带基本数据管理功能,包含停靠带数据管理功能,包括增加、删除、修改功能;对停靠带设置矩形电子围栏功能。
36 |
37 | 公路停靠带主要数据字典包含停靠带编号、桩号、电孑围栏。
38 |
39 | ## 4、报警信息与两客一危车辆信息查询
40 |
41 | 提供报警类型、报警时间段、车牌号、处理状态的查询功能;提供报警的单一和多条同时屏蔽功能;提供报警的单一和多条同时处理功能。
42 |
43 | 按时间段(驶入时间)、行业类别、车牌号联合查询营运车辆信息。
44 |
45 | 如果某一营运车辆在不同的日期行驶,则查询结果中可能会出现多个相同的车牌号。
46 |
47 |
--------------------------------------------------------------------------------
/3.2 智慧高速/两客一危-重点营运车辆/一张网 运营背景下高速公路 “ 两客一危” 动态监管系统.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | # 系统功能
6 |
7 | ## (一)车辆信息查询
8 |
9 | 系统基于全国重点营运车辆联网联控系统和全国道路运政系统“两客一危”车辆相关数据形成车辆监管数据库[2],为高速公路监管执法部门提供辖区内的车辆信息查询,主要包括车辆车牌号、车辆类型、归属企业、联系电话、货物类型、车辆实时定位和轨迹信息等多项数据的查询及多重检索功能,助力高速公路监管执法部门开展车辆违规情况排查工作,大大提高执法效率。
10 |
11 | ## (二)车辆全流程监管
--------------------------------------------------------------------------------
/3.2 智慧高速/两客一危-重点营运车辆/两客一危车辆主动安全智能防控解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/两客一危-重点营运车辆/海康-两客一危综合管理解决方案.md:
--------------------------------------------------------------------------------
1 | # 两客一危综合管理解决方案
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
32 |
33 | 
--------------------------------------------------------------------------------
/3.2 智慧高速/两客一危-重点营运车辆/货车车辆智能监管解决方案 .md:
--------------------------------------------------------------------------------
1 | # 货车车辆智能监管解决方案
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
--------------------------------------------------------------------------------
/3.3 智慧公交/2. 各类参考资料/5G BRT智能网联车路协同系统.md:
--------------------------------------------------------------------------------
1 | # 5G BRT智能网联车路协同系统
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
--------------------------------------------------------------------------------
/3.3 智慧公交/2. 各类参考资料/基于 5G 车路协同智慧公交解决方案.md:
--------------------------------------------------------------------------------
1 | - [基于 5G 车路协同智慧公交解决方案](https://max.book118.com/html/2020/1220/8050064011003030.shtm)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
--------------------------------------------------------------------------------
/3.3 智慧公交/2. 各类参考资料/长沙智慧公交.md:
--------------------------------------------------------------------------------
1 | # 一、信号优先通行
2 |
3 | **信号优先通行功能**是智慧定制公交的第一大优势。**湘江智能通过对公交车辆加载车载智能设备**,**并对沿线17个交叉路口配置智能红绿灯和智能网联设备**,构建起一套“公交优先、车路协同”的公交解决方案。
4 |
5 |
6 |
7 | 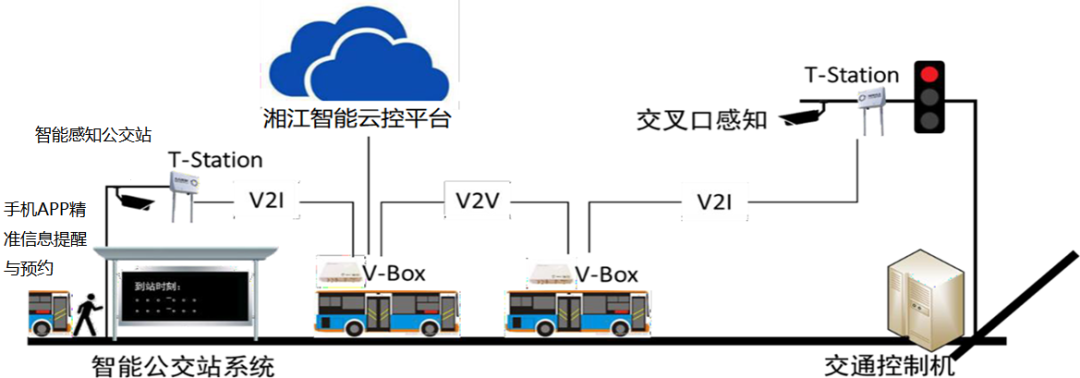
8 |
9 |
10 |
11 | 当公交经过信号灯路口时,在不会对其他方向车辆和行人造成较大影响的前提下,信号灯会自动切换成公交车通行方向的的绿灯,并实现全线绿灯,确保车辆快速通行。根据对比测试,智慧定制公交东线全程7.7公里,早高峰时间段驾驶私家车的通行时间为35分钟,而**乘坐智慧定制公交只需要22分钟,通行时间节省了37%**。
12 |
13 | # 二、APP预约乘车
14 |
15 | **可通过APP进行预约乘车**,是智慧定制公交第二大优势。长沙市民可通过**湘江智能研发设计的专用APP**预约乘车时间,最大限度方便市民出行,助你出门—到站—上车一气呵成,准时准点。
16 |
17 | 
18 |
19 | # 三、智慧公交都市平台
20 |
21 | 为给市民提供更便捷的公交出行服务,**湘江智能通过量身打造的智慧公交都市平台**,对全市每一台智慧公交以及每一处智能化信号灯的实时数据进行监控,并将其迅速下发至公交公司、交管部门。通过智能网联技术,进一步优化公交车辆的调度排班策略,提升交通监管水平。
22 |
23 |
24 |
25 | 
26 |
27 |
28 |
29 | 由于全线绿波通行和划定了公交车专用道,智慧定制公交极大程度地保证了到站准点率,**通行时间误差可控制在两分钟以内**。
--------------------------------------------------------------------------------
/3.3 智慧公交/3. 建设方案/5G+车路协同——智慧公交整体解决方案.md:
--------------------------------------------------------------------------------
1 | 知乎:5G+车路协同——智慧公交整体解决方案来啦!:https://zhuanlan.zhihu.com/p/143547785
2 |
3 | ## 01 车路协同驾驶,既安全又高效
4 |
5 | 基于5G的智慧公交系统通过将车载智能终端、路侧单元、各类传感器等多种设备收集感知到的数据回传给5G边缘计算平台,并利用5G边缘计算平台强大的运算能力得出公交车辆运行线路的执行结果,从而构建一个完整的车际感知网,在V2V、V2I、V2P等场景下提供基于5G低时延、高可靠的互通能力,实现动态感知、安全服务、绿波控制、公交优先等功能。
6 |
7 | 具体来说,通过部署路侧感知设备实时精确获取路口行人、机动车、非机动车的信息,实时反馈给通过路口的公交车辆,可有效降低由于行人闯红灯、公交视野盲区等原因造成的路口交通事故发生率,从而保障智能公交车辆的安全驾驶。
8 |
9 | 同时,在车路协同技术的支持下,“路端”可实时获取智能网联公交车辆的速度、位置、车内乘客数量、驾驶状态等数据,并与交通信号控制系统实时联动。当车辆接近智能路口时,信号灯便结合当前红绿灯状态及公交车所需的绿灯通行相位来决定采用绿灯延长、红灯截断或相位保持等优先机制,确保公交车能够快速通过路口。
10 |
11 | ## 02 5G智能站台,服务便民
12 |
13 | 通过建设新的智能公交站台或者改造现有老旧的公交站台,将先进的通信设备、科技终端设备、便民服务设施融合其中,通过5G网络提供的万物互联的方式,实现真正的5G智能公交站台,充分体现5G时代给社会带来的变化和用户感受。
14 |
15 | 智能站台可以实现与公交车辆的实时互动,电子站牌可显示公交车的实时信息,比如车内拥挤度、预计到达时间等。同时,站台内还设有5G VR/AR设备可实时了解公交车内状态。为了提供最人性化的候车服务,公交站台还提供恒温候车区、自动售货机、自助收储物流柜等便民设施。
16 |
17 | ## 03 智能大数据平台,动态可视管理
18 |
19 | 构建基于5G的综合化大数据平台,通过高速率、低时延的5G通信技术将智能公交车和大数据平台紧紧地连接在一起,如同智慧大脑的神经系统一般,把多维度的公交数据通过智能化分析,按照需求呈现给运维人员,更直观地分析当前系统的运行状态,支持公交线网实时监控和实时调整,从而实现真正的全息智能化运维管理。
20 |
21 | 
22 |
23 | 通过公交智能平台,管理人员可实时获取智能网联公交车有几辆在途,分别处于什么位置,还有几分钟到达下一站。同时,应对司机疲劳驾驶、突发危险等问题,智能后台能及时发现并迅速接管车辆,可以极大程度上避免车辆违规行驶,既保障了公交车的行驶安全,又能为突发事件的处置提供支撑。此外,技术人员还可以从平台直接向公交车辆下达指令,实现远程控制和智能调度,比如公交车辆电量不足时可以发出指令让车辆及时回场充电。
24 |
25 | 
--------------------------------------------------------------------------------
/3.3 智慧公交/4. 公交信号/公交信号优先系统.md:
--------------------------------------------------------------------------------
1 | - [公交信号优先系统](https://www.soft78.com/article/2003/Jp3IpWzKRZSwM51V4FGXeg.html)
2 |
3 | 公交信号优先系统
4 |
5 | 为公交车提供时空优先路权,实现公交车辆优先通行,并为交管用户提供公共优先综合监管和效果评估,大幅度提升公交车辆运行效率,落实公交优先战略部署.
6 |
7 | [RFID](https://www.soft78.com/tag/OQ6-G2GkQ0Si-kR8tsJUYg.html)设备交通信号机
8 |
9 | 产品优势
10 |
11 | 高精度公交检测
12 |
13 | 实现[GPS定位](https://www.soft78.com/tag/CMqL80j8QrCZ3lM-ZKP6rA.html)和RFID检测相结合的公交车辆定位检测
14 |
15 | 准确性时间预测
16 |
17 | 通过深度学习技术精准推算公交车辆预计到达路口时间和信号方案
18 |
19 | 主动式信号优先
20 |
21 | 利用主动优先控制策略为直行及左转公交提供优先通行
22 |
23 | 无缝式信息对接
24 |
25 | 与现有信号控制系统无缝对接,实时获取信控方案信息
26 |
27 | 第三方监管系统
28 |
29 | 构建第三方平台实现公交信号优先的实时监控和综合管理
30 |
31 | 智能化的公交信号方案选取
32 |
33 | 
34 |
35 | 可视化的第三方监管平台
36 |
37 | 
38 |
39 | 可视化全局监控
40 |
41 | 实现交通态势、信控方案及公交车辆全网地图监控
42 |
43 | 实时性路口监测
44 |
45 | 针对信控路口进行实时监控及执行优先指标分析
46 |
47 | 定量化优先评估
48 |
49 | 以大[数据挖掘](https://www.soft78.com/tag/QVq2zcEtQF2rmtCWYAWrvg.html)分析技术对公交优先执行性能综合评估
50 |
51 | 电子化档案管理
52 |
53 | 车辆设备及优先评价指标等动静态信息电子化管理
--------------------------------------------------------------------------------
/3.3 智慧公交/5. 解决方案/百度-智慧公交解决方案.md:
--------------------------------------------------------------------------------
1 | - [智慧公交解决方案](https://jiaotong.baidu.com/publictransit/)
2 |
3 | ## 智慧公交解决方案
4 |
5 | 一站式智能公共出行服务,助力减排增效,提升绿色出行比例
6 |
7 | 百度地图智慧公交解决方案,基于百度地图全公共交通服务、AI智能引擎,深度协同政企,为民众出行提供一站式智能出行平台,提升公共交通出行效率,为政企提供大数据支持决策,提升供给效率。
8 |
9 | ## 方案架构
10 |
11 | 
12 |
13 | ## 多种业务场景解决方案
14 |
15 | ### 公共交通信息全场景发布
16 |
17 | 动态信息实时、精准、全场景触达用户
18 |
19 | 
20 |
21 | ### 「门到门」一站式智能出行服务
22 |
23 | 打造一站式公共出行平台,提升公共出行效率
24 |
25 | 
26 |
27 | ### 公共交通大数据研判分析服务
28 |
29 | 依托百度时空大数据优势,助力城市公共交通服务能力提升
30 |
31 | 
--------------------------------------------------------------------------------
/3.3 智慧公交/基于车路协同的公交优先策略.md:
--------------------------------------------------------------------------------
1 |
2 |
3 | 
4 |
5 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/世纪高通位置大数据助力智慧交通.md:
--------------------------------------------------------------------------------
1 | - [世纪高通位置大数据助力智慧交通](https://weibo.com/ttarticle/p/show?id=2309404620882621629101#related)
2 |
3 | 世纪高通在交通行业的产品和服务已经覆盖交通行业数字化底座打造、交通运行监测研判、重点车辆监管分析、城市交通规划、交通绿色出行评价、道路交通安全管控等多个领域。世纪高通依托自身位置大数据能力和行业客户、合作伙伴一起,在推动智慧交通发展创新的道路上已经做出了重大成绩,未来仍将秉持开放、合作、创新、共赢的发展理念,和更多的合作伙伴一起赋能智慧出行,助力美好生活!
4 |
5 |
6 |
7 | # 01、交警大数据、研判+态势
8 |
9 | 世纪高通交警大数据可视化平台融合了世纪高通互联网路况、天气和交警的卡口、事件、勤务等多源大数据,对城市交通运行指数、平均行驶速度、拥堵里程比、在途量、安全态势、警力覆盖率 6 大交通生命体征进行实时监控。该平台包含七大业务功能:交通路况实时监测、交通运行状态评估、交通研判服务、交通指挥调度、交通设施监管、信号灯评价和创新服务。
10 |
11 |
12 |
13 | 
14 |
15 | # 02、智慧路口
16 |
17 | 路口智慧感知单元以高精地图和车道级高频轨迹数据为基础,实现路口范围车道级实时车辆轨迹的可视化仿真、路口交通运行参数的精细化监测分析、路口运行状态的全方位评价及信控优化指导、主动安全识别及预警辅助,为未来车辆协同化发展奠定良好的产品基础。
18 |
19 |
20 |
21 | 
22 |
23 | # 03、道路安全风险地图
24 |
25 | 道路安全风险地图产品,是融合了驾驶行为、道路结构、气象、事件等多源数据,经过融合分析建模,形成了包括道路网结构画像分析、历史事故数据分析、实时道路风险监测预警及未来道路风险预测等功能的产品。该产品可以面向车厂、交通、交警、保险等行业相关研究机构、管理部门、运营企业等提供道路安全相关的数据服务和决策支撑。
26 |
27 |
28 |
29 | 
30 |
31 | # 04、“一张图”呈现
32 |
33 | 以交通地理信息服务为核心,结合空间基础数据,整合交通运输行业的地理信息资源,为省级交通管理部门提供一体化交通“一张图”建设方案,建立“信息内容丰富、更新维护及时、应用便捷、共建共享”的交通地理信息服务平台。
34 |
35 |
36 |
37 | 
38 |
39 | # 05、智慧高速公路
40 |
41 | 通过对高速公路方向的深挖,面向高速公路监管与服务领域,立足资源整合多元化、公路要素可视化、设施监测数字化、运行监控智能化、监管决策科学化和公众服务智慧化的目标,建设智慧高速公路监管与服务应用体系,助力高速数字化、网络化、智能化,全面提升高速公路感知、监管、运营决策水平。
--------------------------------------------------------------------------------
/3.4 智慧交通/交通大脑2.0解决方案.md:
--------------------------------------------------------------------------------
1 | - [交通大脑2.0解决方案](https://spider.doc88.com/p-91861762850869.html)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/交通研判平台/腾讯:交通态势感知与研判分析平台.md:
--------------------------------------------------------------------------------
1 | - [交通态势感知与研判分析平台](http://www.citnews.com.cn/news/202106/129600.html)
2 |
3 | 腾讯交通态势感知与研判分析平台,依托于交通数字底座这一中台,集成、清洗和标准化治理多源数据,输出16种时空维度的指标,从宏观到微观构建交通运行评价体系,覆盖道路运行监测、综合交通问诊、信号灯优化等场景,推进传统的人工经验判定向大数据研判升级。
4 |
5 | 针对道路运行监测场景,平台可以通过互联网地图数据、路况数据和交通行业动态数据的结合,实现城市路网动态的实时监测、拥堵规律的研判分析,具化路网和路况层级。态势系统还为交通管理者提供自定义配置区域和路线的能力,用户可以得到关注区域的交通指标。
6 |
7 | 
8 |
9 | 对于综合交通问诊场景,该平台可以分析关注区域、路线的交通指标,指标包括拥堵指数、预计通行时间、拥堵里程等实时交通指标和历史均值指标,以此助力公安与交通部门从全局角度进行协调,形成从拥堵识别、致因分析、诊断报告、治理方案、效果评估的交通问诊系统闭环。
10 |
11 | 在交通信号灯优化场景中,系统用户可以通过使用交通态势的路网配置模块,配置需要信号灯优化的路线,筛选只有信号灯的路口,根据指标情况和路况,预估优化信号灯后的指标变化以及信号灯联调方案等。
12 |
13 | 
14 |
15 | 搭建架构清晰的大数据体系和数据平台,实现交通大数据交互,对城市智慧交通快速、稳健、市场化发展具有重要意义。未来,腾讯交通态势感知与研判分析平台将不断升级迭代,持续支撑交通管理与服务,助力城市智慧交通行业发展。
--------------------------------------------------------------------------------
/3.4 智慧交通/吉安城市大脑-智慧交通软件平台.md:
--------------------------------------------------------------------------------
1 | # 智慧交通
2 |
3 | 
4 |
5 |
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | # 视频共享平台
16 |
17 | 
18 |
19 | 
20 |
21 | # 大数据基础平台
22 |
23 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/城市交通大数据/交通大数据服务平台建设方案.md:
--------------------------------------------------------------------------------
1 | - [交通大数据服务平台建设方案(可下载) (qq.com)](https://mp.weixin.qq.com/s/ceViruZDZLSeOZjkwuqa5Q)
2 |
3 | ## **发展政策**
4 |
5 | 2019年12月,交通运输部关于印发了《推进综合交通运输大数据发展行动纲要(2020—2025年)》的通知。《行动纲要》把握一条主线,关注四个重点,实施五大行动,加强四个保障。新的发展共识是“一条主线”。推进综合交通运输大数据发展已经成为新时代交通运输信息化发展的核心内容。新的发展特征要重视“四个重点”,即(一)统筹推进;(二)加强采集;(三)充分汇聚;和(四)综合应用”。推进《行动纲要》需要“五大行动”,即行动一:夯实大数据发展基础;行动二:深入推进大数据共享开放;行动三:全面推动大数据创新应用;行动四:加强大数据安全保障;和行动五:完善大数据管理体系。行动纲要实施的四个保障为(一)加强组织领导。(二)加强队伍建设。(三)加强经费保障。(四)加强效果评估。
6 |
7 | 
8 |
9 | ## **现状交通大数据应用存在的问题**
10 |
11 | 1. 在行业大数据规划方面,缺少整体规划和顶层设计。公路、铁路、航空、航运等各个单一数据应用较多,综合交通大数据缺少整体的规划和顶层设计。亟需加大对多源、多态、多维度大数据的整合和共享。
12 | 2. 在行业大数据治理的观念方面,认识不够。对数据的使用还存在不敢用、不能用的问题。由于缺乏统一的数据治理体系,在数据采集、存储、处理等环节可能存在不科学、不规范等问题,导致错误数据、异常数据、缺失数据产生,无法确保数据的完整性和准确性。导致海量数据散落在不同的信息系统中,由于各系统数据接口不统一,不同机构的数据难以互联互通,严重阻碍数据开放共享,导致数据资产相互割裂、自成体系。
13 | 3. 数据质量不高,数据不好用,不能用。数据质量不高,标准化程度低,数据不好用,不能用。
14 | 4. 大数据标准不完备,难以形成协同共享的局面。由于业务种类多样,各业务部门往往数据采集标准不一、统计口径各异,同一数据源在不同部门的表述可能完全不同,看似相同的数据实际含义也可能大相径庭,数据一致性难以保障。
15 |
16 | ## **建设的必要性**
17 |
18 | 1. 强化综合交通运输运行监测和行业监管能力的需要
19 | 2. 提升交通运输行业服务水平的需要
20 | 3. 实现城市交通运输可持续发展的迫切需要
21 | 4. 推动综合交通运输行业数字化转型的需要
22 | 5. 实现基于交通大数据的辅助决策的需要
23 |
24 | ## **建设方案主要内容**
25 |
26 | 一、总体架构
27 |
28 | - 技术架构
29 | - 网络拓扑
30 | - 安全系统设计
31 | - 模型设计
32 |
33 | 二 、大数据管理设计
34 |
35 | 数据标准管理
36 |
37 | 元数据管理
38 |
39 | 数据质量管理
40 |
41 | 数据资产管理
42 |
43 | 数据安全管理
44 |
45 | 三、应用系统设计
46 |
47 | - 高速公路一张网
48 | - 高速公路数据可视化
49 | - 指标分析
50 | - 交通规划辅助决策
51 |
52 | 三、项目组织管理等其他内容设计
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通云视频平台建设/全国高速公路视频云联网省级云平台方案.md:
--------------------------------------------------------------------------------
1 | - [全国高速公路视频云联网省级云平台方案](https://wenku.baidu.com/view/080c78ffe418964bcf84b9d528ea81c759f52ef1.html?rec_flag=default&fr=Recommend_RelativeRecommend-60272,60321,40251,40300,40356-pc_view_otherlike_new-19e3374e0875f46527d3240c844769eae109a348)
2 |
3 | # 一、技术要求
4 |
5 | 1.省级云平台应接入高速公路全部监控摄像机(收费站车道、收费亭监控设施除外)并进行数字化改造,满足省级云平台开通互联网专线宽带,不少于上下行速率对称的300M/1000路,且具有10个及以上独立公网。
6 |
7 | 3.省级云平台向部级云平台传输的视频资源采用标准H264编码,视频传输支持RTMP、HTP-FLV、HLS三种协议,视频播放无需插件,传输到部级云平台的视频码流加密传输。
8 |
9 | 4.省级云平台支持SsL加密,使视频流在被调看的传输过程中进行加密
10 |
11 | 5.省级云平台向部级云平台提供**本省域内全部摄像机的设备、点位、在线状态等信息**。信息发生变更时自动同步更新至部级云平台。
12 |
13 | 6.**视频资源编号命名、字符叠加及时钟**同步规则应符合《交通运输部办公厅关于做好部省视频监测系统(客户端)整改升级工作的通知》(交办公路函(2019)676号)要求。
14 |
15 | 7.省级云平台应向部级云平台提供全部视频资源的播放地址,且播放地址必须带有鉴权信息,保证视频流的访问控制安全。
16 |
17 | 8.省级云平台充分利用公有云CDN技术,**达到千万级并发能力,保证部级云平台能够同时获得全部摄像机的视频流数据。**
18 |
19 | 9.省级云平台应具备与部级云平台无缝对接能力,使得通过部级云平台具有调看省域范围内32Kpbs低码流(25帧、CF分辨率视频秒级(小于1秒催实时播放能力,部级云平台调用不低于1Mpbs高码流(25帧)视频首屏所耗时间小于4秒。
20 |
21 | 10.省级云平台具备摄像机**云台控制**能力,并向部级云平台提供云台控制服务。
22 |
23 | 11.省级云平台具备提供高速公路**沿线视频监控**设备资源**每隔5分钟截图**及査询调阅截图能力,并向部级云平台提供服务。截图要求CF及以上的分辨率的PG文件,每次截图保留时间不少于7天。
24 |
25 | 12.省级云平台具备**智能分析应用服务**,能够根据摄像机视频对**拥堵事件、交通事件、平均速度、公路流量公路气象**等开展监测分析,并将分析的结构化数据上传至部级云平台;或路段分中心向省级云平台提供上述智能分析结果,由省级云平台将结构化数据上传至部级云平台。
26 |
27 | 13.省级云平台应具备**摄像机图像质量检测服务,**并将检测结果上报至部级云平台;或路段分中心向省级云平习台提供摄像机图像质量检测结果,省级云平台将检测结果上报至部级云平台。
28 |
29 |
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通大数据及支撑平台/10.——大数据支撑平台系统的性能设计要求.md:
--------------------------------------------------------------------------------
1 | # 大数据支撑平台系统的性能设计要求
2 |
3 | ## 1.1 系统的处理能力
4 |
5 | 本方案建设的系统将满足以下性能要求:
6 |
7 | l 本方案中采集子系统需满足和支持多客户端、海量数据的处理,具备1w条/s的数据处理能力。
8 |
9 | l 本系统中消息接口返回数据的时间不超过200ms。
10 |
11 | l 大数据融合分析子系统需支持消息和文件的实时处理,无积压,具备1w条/s的数据处理能力。
12 |
13 | l 通常情况下,系统CPU平均利用率不超过60%;内存平均使用率不超过70%;
14 |
15 | l 在系统高并发处理时,各服务器CPU平均使用率不高于75%,系统内存使用率不超过80%。
16 |
17 | l 系统提供7*24小时的连续运行能力,故障率不超过2次/年
18 |
19 | ## 1.2 系统的可用性
20 |
21 | 本方案所建设的应用服务和接口服务均采用负载均衡部署方案,保障系统可用性。
22 |
23 | l 应用服务和接口服务要求采用负载均衡部署方案,保障系统可用性。
24 |
25 | l 数据访问以及数据交换、传输的可用性要求较高,可用性A≥99.9%(MTBF(平均无故障工作时间)/(MTBF+MTTR(平均维修时间));
26 |
27 | l 应用系统可用性满足系统7X24小时高效运转,可用性A≥99.9%。
28 |
29 | ## 1.3 系统的安全性
30 |
31 | 根据本方案所建系统涉及的信息内容和应用系统重要程度,依据《信息安全等级保护管理办法》和《信息安全技术信息系统安全等级保护定级指南》的相关规定,本方案建设的系统和管理的数据主要为城市的交通运行数据、企业运营数据、基础设施属性数据等重要数据,在系统安全上将满足国家信息安全等级保护二级要求。
32 |
33 | (一)系统软件安全
34 |
35 | 目前主流的操作系统、网络管理系统等系统平台都有较为完善的安全设计和安全控制手段。应利用操作系统、网络管理系统自身的安全控制机制,来保证系统平台的安全。具体可采用以下技术措施:
36 |
37 | 1、严格操作权限控制。根据用户的职责和在系统中的角色为其分配不同级别的权限。严格限制“管理员”访问权限的赋予范围和对象,并按照“赋予最低权限”的策略,为各个用户赋予仅能使用特定的程序并明确定义用户角色的权限,只让合法用户访问相应的系统资源。
38 |
39 | 2、严格密码管理。利用系统的密码生成机制,为每个用户角色定义健壮的密码,并建立密码定期更新机制。
40 |
41 | 3、加强审计。通过日志记录,对用户的危险操作进行警示,防止合法用户的非法操作。
42 |
43 | (二)应用软件安全
44 |
45 | 应用系统是整个系统的用户操作入口,本方案所建立的系统,将在软件设计时充分考虑各种安全隐患,并通过用户授权,并严格密码管理等方式,进行身份认证,为系统建立一套访问控制机制,有效控制非法用户的进入,以保证应用系统的安全。
46 |
47 | (三)系统数据安全
48 |
49 | 系统数据安全除了通过数据库管理系统和系统用户权限控制等安全措施进行保障之外,将按照一定的数据备份策略对数据进行定期备份,一旦发生数据损毁事故,可以尽快恢复,将损失减少到最小程度,从而有效防止信息资源因外部因素而毁坏或灭失,从而保证关键或敏感数据资产的安全。
50 |
51 | 另外,为了防止信息资源的流失,可通过网络管理系统对网络的数据流量进行监控,设置流量门限,控制异常大数据量的信息交换。
52 |
53 | (四)安全管理制度
54 |
55 | 安全保障技术手段是保证信息系统安全的基础,但信息系统发生的大部分安全事故往往都是由于安全管理制度措施的漏洞所引发。因此为了保证所建设的各种安全保障技术手段能真正发挥作用,切实保证信息系统的安全,应该严格制定各项规章制度。
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/中国通信建设-“城市智慧交通”项目交流资料.md:
--------------------------------------------------------------------------------
1 | # 一、智慧交通的背景
2 |
3 | ## 1.1 什么是智慧交通?
4 |
5 | 智慧交通系统(Intelligent Transportation System,简称ITS)是以信息通信技术将人、车、路三者紧密协调、和谐统一而建立起的大范围内、全方位发挥作用的实时、准确、高效的交通运输管理系统。
6 |
7 |
8 |
9 | ## 1.2 世界范围内智慧交通概况
10 |
11 | 澳大利亚
12 |
13 | — 交通控制系统
14 |
15 | — 道路信号系统
16 |
17 | — 车辆监控系统
18 |
19 | — 信息服务系统
20 |
21 | 日本
22 |
23 | ─ 完善智慧交通体系框架建设为主。
24 |
25 | ─ 政府与民间企业相互合作
26 |
27 | — 完善信息采集、处理、发布功能
28 |
29 | — 因地制宜开发智慧交通系统
30 |
31 | 英国、美国
32 |
33 | — 遍布电子眼、摄像头
34 |
35 | —伦敦交警高科技开罚单
36 |
37 |
38 |
39 | # 二、智慧交通的解决方案
40 |
41 | 
42 |
43 |
44 |
45 | 
46 |
47 |
48 |
49 | 
50 |
51 |
52 |
53 | 
54 |
55 | # 三、智慧交通应用案例
56 |
57 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/互联网+交通解决方案探讨.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 |
12 |
13 | 
14 |
15 |
16 |
17 | 
18 |
19 |
20 |
21 | 
22 |
23 |
24 |
25 | 
26 |
27 |
28 |
29 | 
30 |
31 |
32 |
33 | 
34 |
35 |
36 |
37 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/基于RFID技术的智能交通解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 |
12 |
13 | 
14 |
15 | 
16 |
17 |
18 |
19 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/大华公安交通综合管控解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 | 
8 |
9 |
10 |
11 | 
12 |
13 |
14 |
15 | 
16 |
17 |
18 |
19 | 
20 |
21 |
22 |
23 | 
24 |
25 |
26 |
27 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/大华智能交通产品及方案简介.md:
--------------------------------------------------------------------------------
1 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/平安城市与智能交通系统解决方案.md:
--------------------------------------------------------------------------------
1 | 平安城市系统解决方案
2 |
3 | 
4 |
5 |
6 |
7 | 平安城市系统功能及特点
8 |
9 | 
10 |
11 |
12 |
13 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/广州交通信息化建设成果汇报.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/昌吉市智慧交通系统.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 | 
12 |
13 |
14 |
15 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/智慧交通产品和系统技术解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 |
12 |
13 | 
14 |
15 |
16 |
17 | 
18 |
19 |
20 |
21 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/智慧交通解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 |
12 |
13 | 
14 |
15 |
16 |
17 | 
18 |
19 |
20 |
21 | 
22 |
23 |
24 |
25 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/智慧城市交通管理系统.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/智能交通技术、架构及方案总体概述.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 |
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/海康威视智能交通方案.md:
--------------------------------------------------------------------------------
1 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/熊猫电子智慧交通解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 |
6 |
7 | 
8 |
9 |
10 |
11 | 
12 |
13 |
14 |
15 | 
16 |
17 |
18 |
19 | 
20 |
21 |
22 |
23 | 
24 |
25 |
26 |
27 | 
28 |
29 |
30 |
31 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/研华智能道路交通解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/神州数码城市智能交通解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
4 |
5 | 
6 |
7 |
8 |
9 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/英特尔智慧交通解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/长沙县智慧交通系统.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 |
6 |
7 | 
8 |
9 |
10 |
11 | 
12 |
13 |
14 |
15 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案/高科通信智能交通行业背景及产品介绍.md:
--------------------------------------------------------------------------------
1 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通解决方案白皮书:趋势+交通智脑+应用(PPT) .md:
--------------------------------------------------------------------------------
1 | [智慧交通解决方案白皮书:趋势+交通智脑+应用(PPT)](https://mp.weixin.qq.com/s?__biz=MzA3ODA1MzMwNw==&mid=2650508673&idx=1&sn=47df1e3a8f4f6f4e8558724142719b72&chksm=87478755b0300e431312db9609d5698852edd4a6419c2853db09c912bfb779646c850ecb37dc&mpshare=1&scene=24&srcid=0409ZvfcOi8KdQmR6uyPPc21&sharer_sharetime=1617960266429&sharer_shareid=63281a6430fc669a5b286c6a03545e04#rd)
2 |
3 |
4 |
5 |
--------------------------------------------------------------------------------
/3.4 智慧交通/智慧交通运行监测平台(TOCC)建设方案.md:
--------------------------------------------------------------------------------
1 | > 来源:[智慧交通运行监测平台(TOCC)建设方案(可下载) (qq.com)](https://mp.weixin.qq.com/s/KpkUsqQUQwkf6snWNwZR7Q)
2 | >
3 | > 公众号:智能交通技术
4 |
5 | 随着运输市场的日益发展变化,行业管理面临的形势也更加复杂,整体提高行业监管和服务水平愈加迫切。传统管理手段已经难以应对市场变化,尤其是面对突发性事件和自然灾害,光凭增加人力投入已经不足以解决问题。因此有必要建设智能化的交通运输管理系统,提高管理水平,为广大市民提供优质安全的服务,促进城市的经济发展。
6 |
7 | ## **项目建设目标**
8 |
9 | 按照“统一设计、分步实施”建设思路,以服务政府决策、行业监管、企业运营、公众出行为主线,搭建公众服务、决策支持、运行监测、应急处置三大平台,建设一批行业及企业业务应用支撑系统,形成综合交通运行监测与决策支持体系、综合交通应急处置、综合交通公众出行信息服务体系等三大体系,实现监督预警自动化、辅助决策科学化,应急反应快速化,信息服务精准化,为提高政府管控效率,提升公众服务水平,为全面推进智慧城市建设提供有力支撑。
10 |
11 | **建设任务**
12 |
13 | 本工程将建设“一个中心,三大应用平台,六大行业系统,一套支撑系统,一套配套工程”。
14 |
15 | (1) 一个中心:综合交通运行监测与应急指挥中心
16 |
17 | (2) 三大平台:综合交通运行监测与决策分析平台、交通应急处置平台、公众信息服务平台
18 |
19 | (3) 六大行业应用系统
20 |
21 | - 公路养护管理系统:包含养护巡查管理、养护规划管理、养护人员管理等。
22 | - 公路路政管理系统:包括公路网运行监测、路政管理等。
23 | - 道路运输管理信息系统:包括运政管理,出租车、两客一危、地面公交等行业管理。
24 | - 视频监控管理系统:道路与桥梁综合监控系统、城区主要出入口视频监控系统、渡口码头客渡监控系统等。
25 | - 办公自动化OA系统:办公OA门户、个人办公系统等
26 | - 移动综合管理系统:移动综合管理系统是对现有路政、养护、运政、执法等系统的一种灵活性、机动性扩充,实现统一管理和指挥。
27 |
28 | (4) 支撑系统:网络系统、主机及存储系统、安全系统。
29 |
30 | (5) 配套工程:指挥大厅、机房等。
31 |
32 |
--------------------------------------------------------------------------------
/3.4 智慧交通/智能交通大数据及云应用平台解决方案/智慧交通大数据云平台建设综合解决方案.md:
--------------------------------------------------------------------------------
1 | - [智慧交通大数据云平台建设综合解决方案](https://max.book118.com/html/2021/0713/8056057020003121.shtm)
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | # 智能公交业务信息系统
18 |
19 | 
20 |
21 | # 出租车专项业务系统
22 |
23 | 
24 |
25 | # 交通管理平台业务功能
26 |
27 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/智能交通大数据及云应用平台解决方案/智慧交通大数据平台及应用.md:
--------------------------------------------------------------------------------
1 | # 智慧交通大数据中心建设方案(1+N战略)
2 |
3 | 
4 |
5 | 
6 |
7 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/烟台市可视化决策分析系统.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | # PC端
14 |
15 | 
16 |
17 | 
18 |
19 | # 移动端
20 |
21 | 
22 |
23 | 
--------------------------------------------------------------------------------
/3.4 智慧交通/西安智慧交通平台.md:
--------------------------------------------------------------------------------
1 | # 1.案例概述
2 |
3 | 西安交警互联网+大数据平台是将数字李生城市与城市内交通管理业务相结合形成的项目。在本项目中集中融合了普通电子地图、高精度道路地图、三维模型地图、多源交通信息融合、天气、122警情、视频、微信各类基础数据,这些数据来源渠道不同、规格和形式不同,所有数据源都通过平台的DataHIVE数据蜂巢具备的数据集成融合能力进行汇聚、清洗、分类,处理和分布。在交警管理的各个业务领域,通过平台提供的Minemap将所有数据以直观形象的形式在可视化大屏中集中体现,以数字李生的城市基础空间数据为数字基座,在一个大屏上发布和展示各个业务端的应用成果和信息反馈,实现交警业务管理的情报获取、指挥调度、勤务管理、监督考核、宣传引导五大环节的实际运用。
4 |
5 | # 2.典型场景
6 |
7 | ## 场景1:多源数据融合处理及统一
8 |
9 | 发布基于数字李生的交警管理可以实现将多种交通管理的业务数据以统一平台的形式进行接入,融合与处理。平台中的多种类型的数据探针,能够快速对接不同数据源,实现非侵入式的数据汇聚。不修改数据的原始状态,只感知数据变化情况。这些数据源既包括常用的标准的业务数据,比如122接警数据、出警业务数据,也包括互联网下的非结构化数据,如微信方式反馈数据,还包括一些流式的动态数据,比如路况数据,交通事件(事故、施工、灾害等)。通过平台的数据汇聚能力,整合各类业务相关数据,并对数据按照通用的模型进行校准补齐,构建完整的数字化交通形态,实现全息数据融合感知。
10 |
11 | 
12 |
13 | ## 场景2:可视化交通指挥调度
14 |
15 | 在数字李生的交警管理平台上进行全方位、多角度、立体化的交警管理业务数据展示功能。通过平台自带的矢量对象、热力、航线、飞行、粒子等可视化模型及渲染算法,能够实现针对丰富多元的交通要素进行高效逼真的可视化表达,直观地通过可视化的方式实现业务场景的展现。
16 |
17 | 
18 |
19 | ## 场景3:交通路口精细化管理
20 |
21 | 通过针对融合路口、视频、卡口、信号灯数据,对道路及路口进行精细化管理与动态评价。通过交通路口精细化管理实现了帮助交通管理者掌握道路路口的情况、通过接入交通要素数据,动态精细化方式刻画路口交通运行情况,为针对路口信号评价及优化提供建议,同时能够提供全时序的路口治理前后数据报告。
22 |
23 | 
--------------------------------------------------------------------------------
/3.4.1 指标交通评价系统/基于冲击波理论和概率混合的信号交叉口采样轨迹数据驱动的周期体积估计方法.md:
--------------------------------------------------------------------------------
1 | - [基于冲击波理论和概率混合的信号交叉口采样轨迹数据驱动的周期体积估计方法](https://into.tongji.edu.cn/info/1103/1480.htm)
2 |
3 | **作者:Jiarong Yao, Fuliang Li, Keshuang Tang\*, Sun Jian.**
4 |
5 | **已见刊于:IEEE Transactions on Intelligent Transportation Systems. Vol. 21, No. 6, pp. 2615-2627, June 2020. DOI: 10.1109/TITS.2019.2921478.**
6 |
7 | **关键词:信号控制交叉口、流量估计、抽样轨迹数据、交通冲击波理论、有界时变泊松过程、M3分布**
8 |
9 | 在城市道路信号控制交叉口,周期级到达流量对交通状态估计和信号控制优化具有重要作用。传统的交通检测主要是通过以线圈为代表的固定检测器获取流量数据从而对实际到达流量进行估计,但是固定检测器的布设范围有限,而且还存在检测失效的问题。随着车辆定位和车联网技术的发展和普及,实时的轨迹数据逐渐应用于城市交通管理。轨迹数据一方面传输频率要小得多,比起定点检测器数据一般为10-60秒的传输频率,能够捕捉到更准确的车流信息;另一方面,轨迹数据的应用空间范围没有限制,更适用于路网层面长期宏观的检测需求,在交通检测和管理系统的应用具有良好前景。
10 |
11 | 传统流量估计的研究主要是基于定点检测器实现,预测方法包括滤波算法等数理统计方法和基本图、元胞传输模型等模型解析法。基于定点检测器的流量估计方法主要存在设备布设和维护成本高、上传频率低的问题,而且得到的速度、流量等检测指标是基于检测步长的平均值,不能体现交通流的波动性和随机性。随着轨迹数据的出现,使用轨迹数据用于流量估计的研究可以分为两类:一类沿用传统数理统计和解析方法,只是更换了数据源;另一类方法则是根据轨迹数据的特征提出专门定制化的处理和建模思路。其中数理统计方法一般是历史检测数据实现,而且模型参数大多需要实证数据标定;采用滤波算法或者基本图要基于历史数据拟合交通流参数的关系,一般性较差。此外,基于轨迹的方法研究难点还在于如何确保低捕获率场景下的估计精度,因此,建立一个一般性和适用性较强的周期流量估计方法对于轨迹数据的进一步应用推广具有重要的现实意义。
12 |
13 | 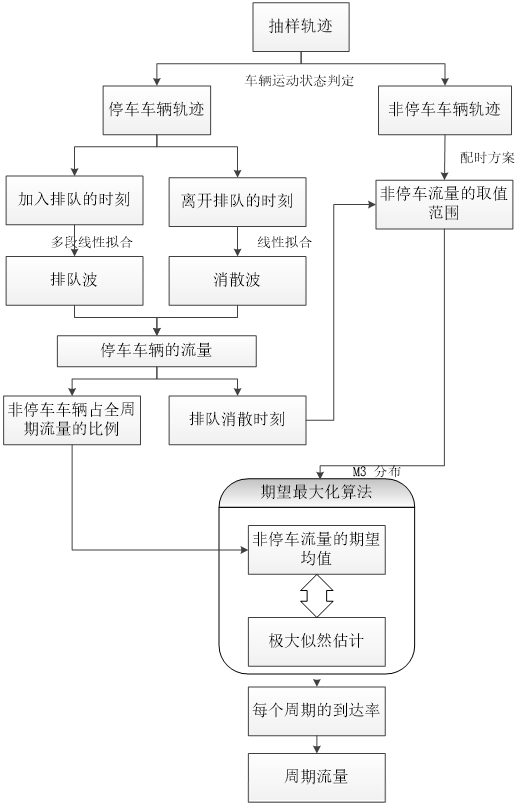
14 |
15 | **图1 技术流程**
16 |
17 | 图1简要诠释了本方法的技术流程。首先,获取抽样车辆的轨迹点数据,并基于轨迹点的速度判断车辆所处的运动状态,将抽样轨迹分为排队停车的轨迹和非排队直接通过交叉口的轨迹,并针对停车轨迹通过内插法确定车辆加入或离开排队的关键点。对同一周期内所有停车抽样轨迹的关键点,利用多段线性拟合对车辆排队的集结波和消散波进行估计,并计算两个交通波的交点作为排队车辆的流量估计值,如图2所示。针对非排队轨迹,则将非排队车辆的到达过程假设为有限取值的泊松分布,相应地车头时距服从M3分布,根据压缩波计算全部排队车辆以及红灯期间到达车辆消散的时刻,计算该周期的队列比、非排队车辆的车头时距取值范围等参数。由此,本文将全周期的流量估计问题转化为融合了交通波理论重构排队和基于非排队车辆的泊松分布和M3分布的参数估计问题,通过极大似然估计法对全周期的到达率进行估计,并用期望最大法(EM)求解,即可得到每个周期的到达流量。
18 |
19 | 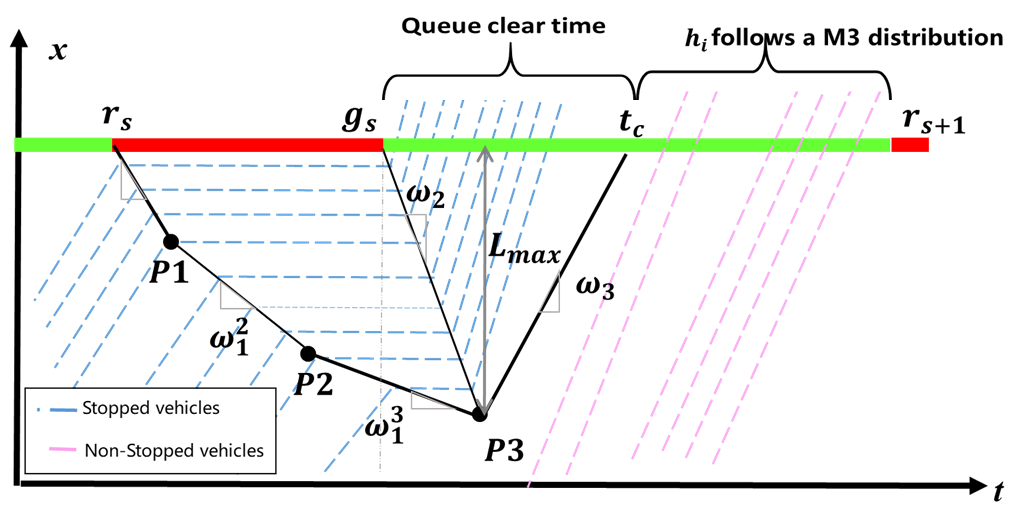
20 |
21 | **图2 融合方法示意图**
22 |
23 | 本方法通过深圳市皇岗路-福中路交叉口的实证数据进行了验证,在五个小时囊括六个TOD方案的验证时段内,算法在抽样轨迹的平均捕获率为7.6%的条件下,时段流量估计精度达95%以上,周期流量估计精度达80%以上。并且针对实证验证场景建立了对应的仿真模型对饱和度和捕获率进行了敏感性分析。结果标明本方法能够充分挖掘轨迹数据信息,对不同的交通需求场景具有较好的适应性,在低捕获率条件下仍然能得到较高的估计精度,模型可靠性较好。
--------------------------------------------------------------------------------
/3.4.1 指标交通评价系统/基于稀疏轨迹数据的信号交叉口基于周期的排队长度估计.md:
--------------------------------------------------------------------------------
1 | - [基于稀疏轨迹数据的信号交叉口基于周期的排队长度估计](https://into.tongji.edu.cn/info/1103/1504.htm)
2 |
3 | 近年来,利用高频抽样车辆轨迹数据估计交叉口排队长度的研究越来越受到关注。现有的周期级排队长度估计方法依然面临稀疏轨迹数据条件下(周期平均抽样轨迹数不足1条)估计精度低且不稳定的问题。因此,为了解决该问题,本研究提出了一种融合实时观测轨迹数据和历史轨迹数据的全新的周期排队长度估计方法。
4 |
5 | 首先,在已知信号配时参数的情况下,通过叠加历史轨迹数据可以得到分析时段内的车辆到达流率分布,如图1所示;而后,基于周期内观测到的抽样轨迹的组合类型,可以区分4种典型观测场景,即同时观测到排队和非排队轨迹、仅观测到排队轨迹、仅观测到非排队轨迹,未观测到任何轨迹,如图2所示。通过挖掘周期内实时轨迹数据的到达信息,可以分别构建排队长度的似然函数;最后,通过极大似然估计的方法可以估计出各场景下周期内最大可能的排队长度。
6 |
7 | 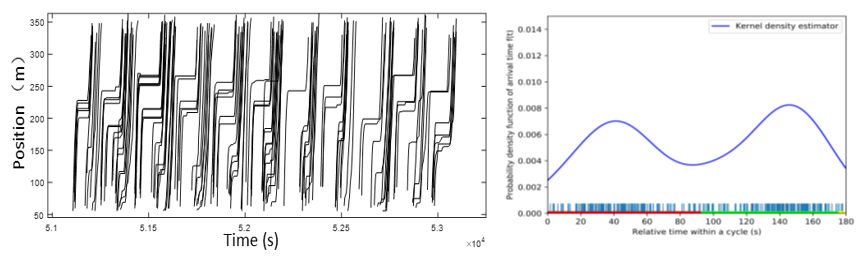
8 |
9 | **图1 车辆到达流率的周期分布**
10 |
11 | 
12 |
13 | **图2 周期内轨迹的4种典型观测场景**
14 |
15 | 方法通过仿真和实证数据都进行了验证,结果表明,本文方法优于现有方法,且可以在稀疏轨迹数据环境下实现周期排队长度的精准估计。仿真结果显示,尽管周期平均抽样轨迹数不足1条,本文方法对于队尾排队长度(BOQ)估计平均误差MAE也仅为2辆/周期。实证结果表明,在深圳市福中路皇岗路交叉口轨迹渗透率仅为8.96%条件下,本文方法的平均估计误差MAE也仅为2.42辆/周期,平均相对误差MAPE为11.3%,表现出良好的估计性能。
16 |
17 | 此外,本研究还发现:1)通过挖掘历史轨迹数据得到周期内的时变到达流率分布,使得本文方法可以准确的识别可能的队尾排队长度;2)利用非排队轨迹提供的排队长度上界可以显著提升估计精度;3)排队长度似然函数与到达流率无关,即在周期内有排队轨迹的情况下,无需到达流率即可实施本文方法。
--------------------------------------------------------------------------------
/3.4.1 指标交通评价系统/融合车牌识别数据和车辆轨迹数据的信号交叉口基于车道的排队长度估计.md:
--------------------------------------------------------------------------------
1 | - [融合车牌识别数据和车辆轨迹数据的信号交叉口基于车道的排队长度估计](https://into.tongji.edu.cn/info/1103/1510.htm)
2 |
3 | 排队长度是评价信号控制交叉口运行性能的最重要指标之一。随着智能网联技术的发展,利用车辆轨迹数据来估计排队长度已经受到广泛的关注。但是,现有的大多数方法都基于特定的假设,例如已知的到达模式或高渗透率的抽样轨迹。此外,在稀疏轨迹环境下,大多数方法都不够稳定甚至无法实施。因此,本研究引入车牌识别(LPR)数据与轨迹数据进行融合,提出一种基于车道的排队长度估计方法,方法流程图如图1所示。
4 |
5 | 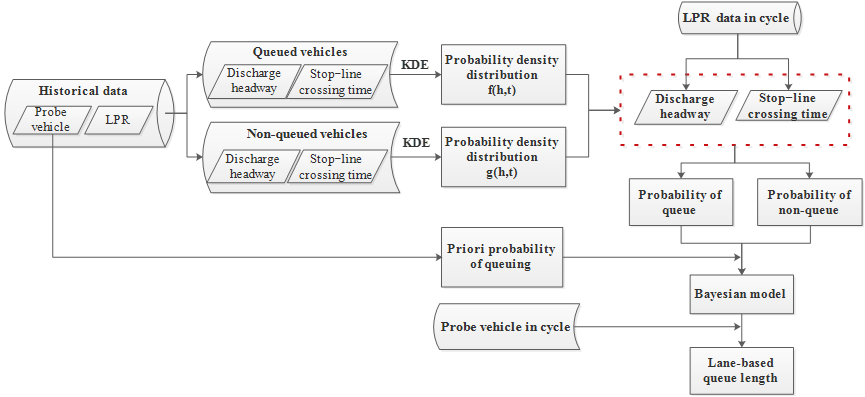
6 |
7 | **图1未饱和情况下数据融合方法流程图**
8 |
9 | 首先,通过将LPR数据与抽样轨迹数据进行匹配,可以标定各类车辆(未饱和情况下的排队车辆和非排队车辆,过饱和情况下的一次排队车辆和二次排队车辆)的排队离去车头时距与通过停车线时间的二维概率密度分布;然后,基于周期内观测到的抽样轨迹可以推导排队车辆的上下界;最后,基于贝叶斯理论可以分别推导未饱和情况下的车道级排队长度以及过饱和情况的初始排队的最大概率。
10 |
11 | 本文方法通过仿真和实证案例都进行了评估。仿真结果表明,在抽样轨迹渗透率低至3%的条件下,本文提出的方法可以在未饱和及过饱和情况下都实现排队长度的准确估计。而实证结果表明,本文的方法优于仅使用抽样轨迹的方法,平均绝对误差MAE和平均相对误差MAPE分别为2.67辆/周期和10.4%,现有方法则分别为2.8辆/周期和14.8%。
12 |
13 | 本研究的学术贡献在于:1)提出了一种融合LPR和抽样轨迹数据的方法,可以同时估计各周期车道级未饱和情况下的最大排队长度以及过饱和情况下的初始排队。与现有方法不同,本文的方法无需任何先验的到达假设,在极低渗透率条件下同样可以使用;2)利用核密度估计方法推到了不同类型的车辆的车头时距及通过停车线时刻的二维先验分布,该分布同样可以用于其他研究的排队长度估计。
--------------------------------------------------------------------------------
/3.4.1 指标交通评价系统/高速路网交通运行状态评价与判断.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
--------------------------------------------------------------------------------
/3.4.2 智慧路口/1. 解决方案/上海黎明瑞达.md:
--------------------------------------------------------------------------------
1 | # 全息路口
2 |
3 | 随着城市建设高速发展,交通拥堵问题日益突出,路口则成为拥堵的重灾区,对路口交通优化是缓解拥堵最有效的手段之一,全息路口解决方案应运而生。
4 | 该方案使用4个毫米波广域雷达和4个枪机。雷达主要负责路段目标的稳定跟踪,并可实时上传每个车道车流量、排队长度等信息,实时监测路段拥堵、异常停车等事件,达到车辆全程跟踪、优化红绿灯及自动感知交通事故的效果。将雷达跟踪数据与摄像机数据在智能交通微边缘服务器上进行融合,最终在平台上进行展示,形成数字化上帝视角。
5 |
6 | 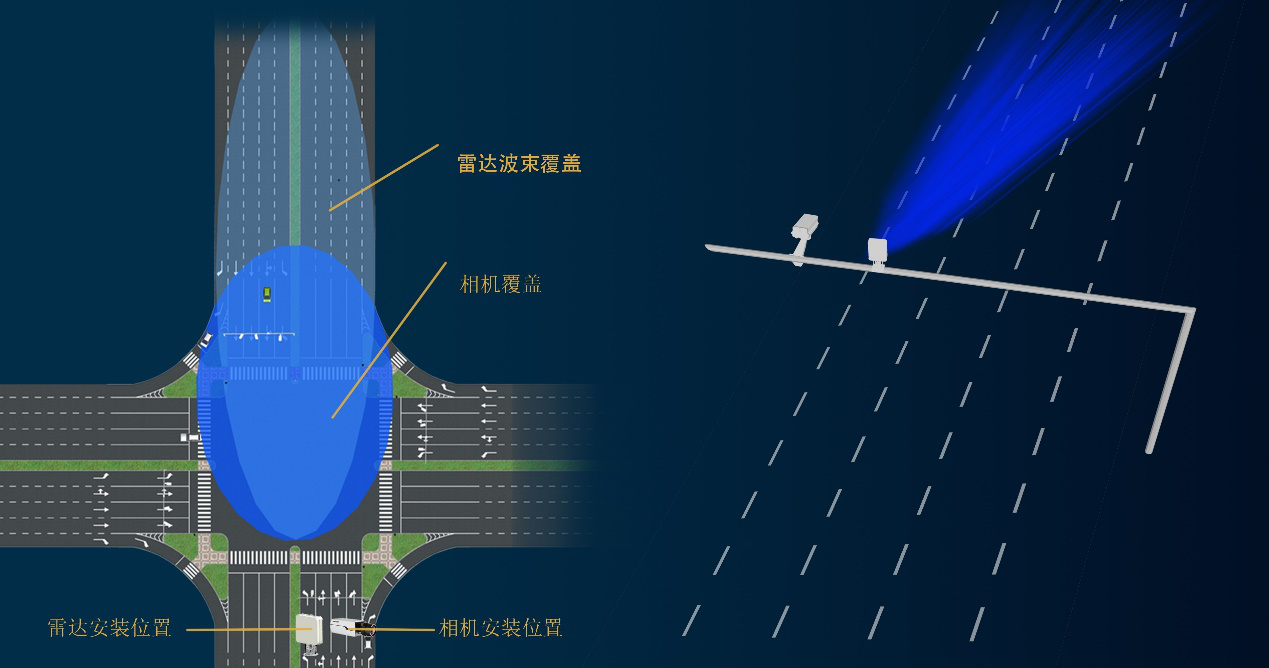
7 |
8 | 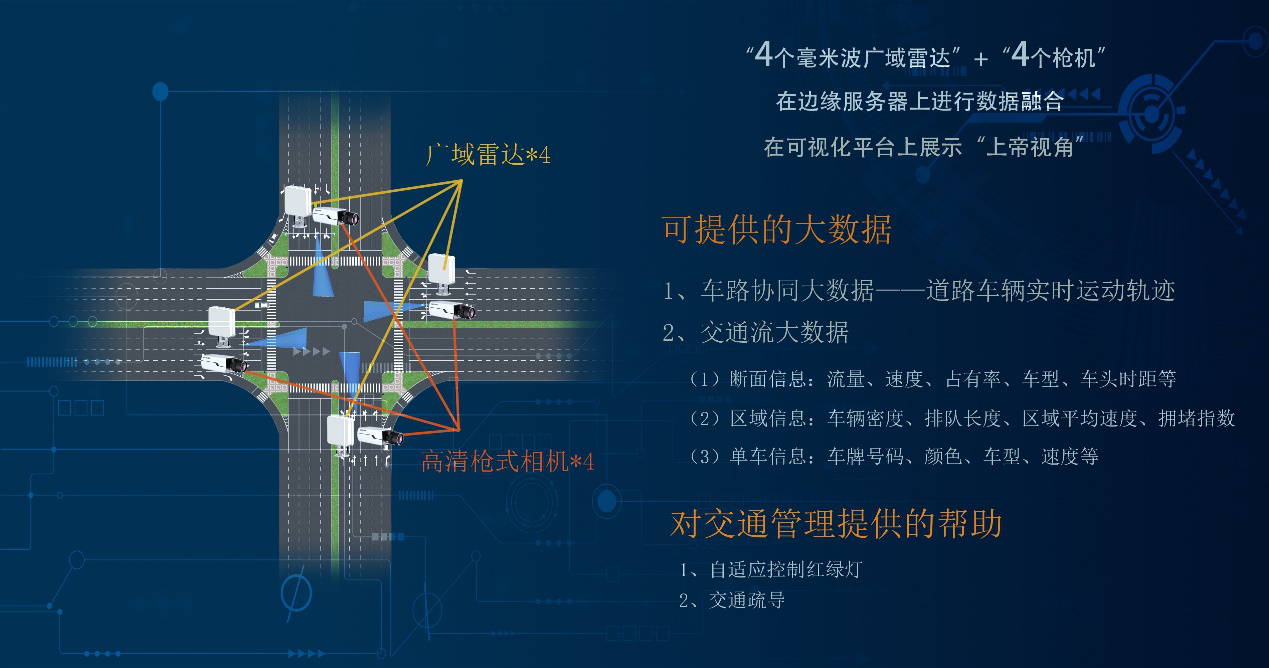
9 |
10 | 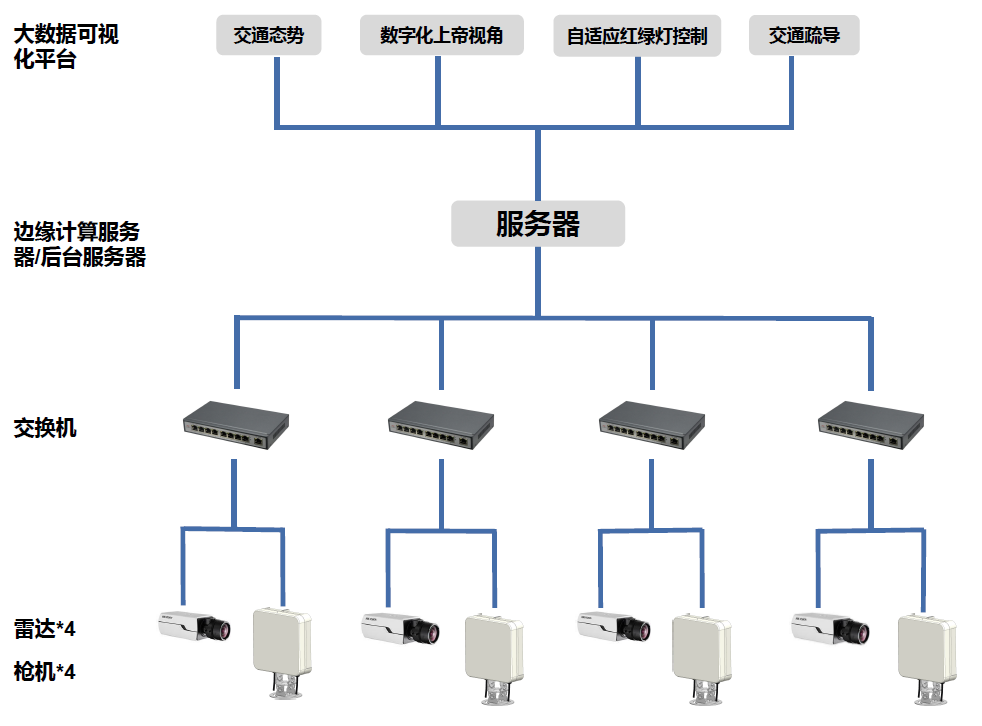
--------------------------------------------------------------------------------
/3.4.2 智慧路口/1. 解决方案/东软:全息智慧路口.md:
--------------------------------------------------------------------------------
1 | ## 概述
2 |
3 | 系统通过对全息道路的数据感知,通过卡口相机及路侧雷达等设备获取数据,算力和算法边缘化,在前端或近端进行数据的实时处理和及时反馈,让每个路口和路段都具备全息感知、万物互联、智能管控能力,各种异常事件的预警信息更快速传达到现场,最大程度减少交通事故,并通过数字孪生技术,建立三维可视化模型,实现对道路交通状况的多视角呈现。
4 |
5 | ## 产品功能
6 |
7 | 
8 |
9 | 
10 |
11 | ## 产品优势
12 |
13 | - 可视化全息展示: 3D及路口实景,对交通路口的交通参与者(人、车)、交通元素(车道、信号等),交通信息(流量、事件),交通管控等进行全息展示,让路口及全局交通的每一条脉络清晰可见。
14 | - 统一管控:实现卡口、电警、监控、数据等实时处理分析和展示,对实时交通进行立体化统一管控。
15 | - 精准服务:实现对车、人的精准服务,降低交通事故、交通拥堵、交通违法行为等,以及由此产生的交通影响;精准分析交通设备的工作状态,实时掌控全局工作状态,智慧服务。
16 | - 信息及时发布:系统实时检测各类交通信息,及时发现各类异常交通事件,第一时间通过各渠道进行信息发布,做到信息及时精准共享。
17 |
18 | ## 应用案例
19 |
20 | 全息智慧路口产品在宁波市几大重点路口进行推广使用,系统通过已建的卡口相机对全息道路进行数据感知,采用了2D、3D数字孪生技术,全视角、全息的信息展示,为宁波市大范围推广全息智慧路口技术,打开了良好的开端。
21 |
22 |
--------------------------------------------------------------------------------
/3.4.2 智慧路口/1. 解决方案/华为:全息路口解决方案.md:
--------------------------------------------------------------------------------
1 | - [华为:全息路口解决方案](https://holosens.e.huawei.com/road.html?lang=zh)
2 |
3 | # 行业痛点
4 |
5 | 随着城市规模不断扩张,车辆保有数量井喷,形成海量交通大数据,包含人、车、路、视频、图片等各类数据。传统交通治理依赖前端摄像机抓拍图片视频,后端人工审核处理,并存在诸多问题:
6 |
7 | - 传统路口是单方向视角,不容易看;
8 | - 事故通过人工方式报警,处警时间长,小事故大拥堵;
9 | - 传统信号控制是车看灯,红绿灯固定配时;
10 | - 从历史事故数据中分析得出交通黑点、隐患发现,后知后觉。
11 |
12 | # 方案介绍
13 |
14 | 全息路口解决方案采用多方向雷视拟合技术,结合高精度地图呈现路口全息视角,通过对交通事故、事件的自动感知,精准数据辅助定责,可节约处警时间,降低次生事故发生;提供精准车道级流量数据,支持路口信控自适应配时;通过实时交通热力图和路网出行规律,快速发现交通隐患点,缩短治理周期,并依据数据分析给出交通组织优化的合理建议。
15 |
16 | 
17 |
18 | 方案亮点
19 |
20 | - 全息视角
21 |
22 | 由传统路口四个方向的视频转换成数字化全息视角,结合高精度地图,全面刻画十字路口、丁字路口、X型路口、Y型路口、立交桥等多种交通路口的运行状况。
23 |
24 | - 信控优化
25 |
26 | 通过机非人精准数据,全面分析交通运行状态,路口信号灯控制从原来“车看灯”固定模式到“灯看车”实时模式,提升通行效率。
27 |
28 | - 辅助定责
29 |
30 | 事故从人工报警到自动发现、自动报警,精准轨迹辅助定责,减少交警处警时间。
31 |
32 | - 交通组织优化
33 |
34 | 隐患分析从基于历史事故数据到基于实时交通热力图,精准数据支撑交通黑点自动发现、交通组织优化。
35 |
36 | # 产品清单
37 |
38 | 
39 |
40 | 应用案例
41 |
42 | SD市某T字路口采用全息路口解决方案,从信号优控、绿波协调两方面进行优化。经过比对测试,早晚高峰通行车流量平均增加20%以上,平峰行程时间平均减少20%以上,路口多方向形成一个有机的整体,实现路口的就近自适应控制,真正做到城市交通安全、有序、畅通。
--------------------------------------------------------------------------------
/3.4.2 智慧路口/2. 各类博文资料/某高校智慧全息路口案例.md:
--------------------------------------------------------------------------------
1 | - [某高校智慧全息路口案例](https://zhuanlan.zhihu.com/p/406217346)
2 |
3 | ## **03 重新定义智慧城市全息路口**——来自某高校智慧全息路口案例
4 |
5 | 
6 |
7 |
8 |
9 | 该项目为51WORLD参与建设的某大学智慧全息路口,**用于路口综合诊断及优化。该项目充分利用交警自身建设的设备数据**,深度结合交警日常管理业务,快速定位问题路口,从信号配时优化、流量规律、违法情况、拥堵情况、手控情况、路口运行评价等多个维度,对路口进行综合管理。
10 |
11 |
--------------------------------------------------------------------------------
/3.4.2 智慧路口/3. 信号控制系统/百度-智能信号控制.md:
--------------------------------------------------------------------------------
1 | - [智能信号控制解决方案](https://jiaotong.baidu.com/trafficsignalctrl/)
2 |
3 | ## 智能信号控制解决方案
4 |
5 | 数据智能、AI使能、网联赋能,让道路更畅通,出行更美好
6 |
7 | 百度智能信控依托自身数据、技术和产品优势,以缓堵保畅和品质出行为使命,致力于打造时空一体化的交通优化解决方案,以一站式智慧服务模式保障出行安全、提高出行效率,增强民众获得感。
8 |
9 | ## 核心优势
10 |
11 | 
12 |
13 | ## 方案架构
14 |
15 | 
16 |
17 | ## 产品方案
18 |
19 | ### 智能优化
20 |
21 | 数据智能,业务闭环
22 |
23 | 百度信号优化平台通过前端感知数据的交通特征智能提取,经过AI诊断-优化-控制-评价-运维,打造“数据智能+流程闭环”新模式,从而更全面、更精准地优化交通控制、缓解交通拥堵。
24 |
25 | 
26 |
27 | ### 智慧路口
28 |
29 | 百度信号优化平台通过前端感知数据的交通特征智能提取,经过AI诊断-优化-控制-评价-运维,打造“数据智能+流程闭环”新模式,从而更全面、更精准地优化交通控制、缓解交通拥堵。
--------------------------------------------------------------------------------
/3.4.2 智慧路口/3. 信号控制系统/自适应信号控制系统.md:
--------------------------------------------------------------------------------
1 | - [自适应信号控制系统](https://www.hisense-transtech.com.cn/Urban_Transport/Solution/929.html)
2 |
3 | 海信 HiCON 交通信号控制系统集交通数据采集、信号方案优化、控制效果评价于一体,具备宏观、中观、微观3大类40种控制策略,支持多品牌信号机接入并提供简捷易用的图形化配置,在满足交警日常的交通信号管理需求的同时,还可充分适应环岛、 可变车道等特殊交通场景。
4 |
5 | 
6 |
7 |
--------------------------------------------------------------------------------
/3.4.2 智慧路口/4. 全息路口/全息路口解决方案.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
--------------------------------------------------------------------------------
/3.4.2 智慧路口/5. 智慧路口/基于计算机视觉的交通路口智能监控系统:
--------------------------------------------------------------------------------
1 | - [基于计算机视觉的交通路口智能监控系统](https://github.com/Kevinnan-teen/Intelligent-Traffic-Based-On-CV)
2 |
3 | ## 1、项目介绍
4 |
5 | **项目背景**:智能交通监控系统采用识别技术进行分析,有异常状况发生(比如,当有行人闯红灯时、路口车辆和行人流量过大,导致堵塞交通时)就会自动通知交通管理人员.
6 |
7 | ## 2、项目演示
8 |
9 | 演示视频地址 : https://lucasnan.gitee.io/info/video.html
10 |
11 | ## 3、环境依赖
12 |
13 | - SRS流媒体服务器
14 |
15 | 使用开源的[SRS实时视频服务器](https://github.com/ossrs/srs),在之前购买的阿里云服务器上搭建了一个流媒体服务器,详细的过程可以参考我的博客--[基于SRS搭建RTMP直播推流服务器](http://kevinnan.org.cn/index.php/archives/537/).
16 |
17 | 当然,如果你没有云服务器,也可以在本地的Linux机器上搭建SRS流媒体服务器,搭建方法可以查看该项目文档,也可参考之前提到的我的博客.
18 |
19 | - GPU服务器
20 |
21 | 我直接在本地运行服务端脚本来替代GPU服务器.如果是要部署的话,只需要修改服务器脚本`server_selector.py`中的`IP`和`Port`即可.
--------------------------------------------------------------------------------
/3.4.2 智慧路口/路口截屏图片.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 |
--------------------------------------------------------------------------------
/3.4.3 智慧隧道/数字孪生隧道视频地址记录.md:
--------------------------------------------------------------------------------
1 | - [禾合数字孪生智慧隧道V1.0](https://v.qq.com/x/page/z31625senmo.html)
2 | - [UE4大桥展示](https://live.csdn.net/v/173641)
3 | - [云创联通](http://lingmoushijie.com/management.html)
4 |
5 |
--------------------------------------------------------------------------------
/3.4.3 智慧隧道/新基建下,智慧交通发展新规划:智慧隧道监控可视化系统.md:
--------------------------------------------------------------------------------
1 | - [新基建下,智慧交通发展新规划:智慧隧道监控可视化系统](https://cloud.tencent.com/developer/article/1645251)
2 |
3 | **前言**
4 |
5 | 随着当代经济的发展,交通环境日益紧张,加上山区地区的交通运输的需求,隧道的交通建设开发方兴未艾。**隧道交通**的规划越来越完备,而对于隧道内监控管理维护却显得有些不足。而**工业4.0**的崛起,逐步进入了智能化的新时代,伴随着**工业互联网**的新兴力量,工控可视化系统应运而生,不仅能起到日常的监控管理维护,在发现事故或险情时能第一时间采取**应急预案**;还能通过实时数据的采集反馈,远程操控设备运行以及预测设备的优良性能,从而达到更立体更全面的工控系统的运行。
6 |
7 | **HT for Web** 不止自主研发了强大的基于 HTML5 的 2D、3D 渲染引擎,为可视化提供了丰富的展示效果。介于 **2D 组态**和 **3D 组态**上,**Hightopo**(以下简称 HT )的 **HT for Web** 产品上的有着丰富的组态化可供选择,本文将介绍如何运用 HT 丰富的 **2/3D 组态**搭建出一个隧道监控可视化系统的解决方案。
8 |
9 | 监控隧道内的车道堵塞情况、隧道内的车祸现场,在隧道中显示当前车祸位置并在隧道口给予提示等功能都是非常有必要的。这个隧道监控可视化系统的主要内容包括:照明、风机、车道指示灯、交通信号灯、情报板、消防、火灾报警、风向仪、车行横洞、微波车检、隧道紧急逃生出口的控制以及事故模拟等等。
10 |
11 | ### **界面简介及效果预览**
12 |
13 | 
14 |
15 | 
16 |
17 | 预览链接:http://www.hightopo.com/demo/tunnel2/index.html
18 |
19 | 上图中的各种设备都可以双击,此时 camera 的位置会从当前位置移动到双击的设备的正前方;隧道入口的展示牌会自动轮播,出现事故时会展示牌中的内容会由“限速80,请开车灯”变为“超车道两车追尾,请减速慢行”;两隧道中间的逃生通道上方的指示牌是可以点击的,点击切换为蓝绿色激活状态,两旁的逃生通道门也会打开,再单击指示牌变为灰色,门关闭;还有一个事故现场模拟,双击两旁变压器中其中一个,在隧道内会出现一个“事故现场图标”,单击此图标,出现弹出框显示事故等等等等。
--------------------------------------------------------------------------------
/3.4.3 智慧隧道/智慧隧道车路协同平台——来自某智慧高速案例.md:
--------------------------------------------------------------------------------
1 | - [**智慧隧道车路协同平台**——来自某智慧高速案例](https://zhuanlan.zhihu.com/p/406217346)
2 |
3 | ## **02 智慧隧道车路协同平台**——来自某智慧高速案例
4 |
5 | 
6 |
7 |
8 |
9 | 由交科集团承接的智能网联重载货运车路协同科研实验路段项目,其立足典型重载交通特点,以智能网联货运编队为切入点,对运营中的高速公路进行改造,实现示范路段全域感知和车路实时交互,并将单车智能百米级感知范围拓展至路段全域感知。该案例以提高运输效率安全性为目的,实现隧道安全感知预警、提高服务区和收费多场景运营服务能力,增加通行费收益为建设目标,为车路协同技术发展和工程实施提供山西样板和山西经验。
10 |
11 | 
12 |
13 |
14 |
15 | **51WORLD针对该项目特点,还原第一跟车视角、第三鸟瞰视角及驾驶员视角,以全自由视觉三维实景仿真,**帮助智能网联云控中心获取各类多源数据,包括来自高速全路段的智能传感设备、气象感知元器件、路侧决策载体及行驶车辆等,并进行全场景高精度平行仿真,动态同步真实示范路段轨迹及物理机制。
16 |
17 | 项目长15公里,全路段实现高精度、车道级三维仿真,传感器设备与交通设施仿真,以及服务区、收费站、隧道管理等应用场景1:1仿真。叠加实时还原车辆轨迹,可实现真实车辆轨迹和仿真轨迹相结合。同时该场景也可实现早中晚和四季变化。
--------------------------------------------------------------------------------
/3.6 智慧公路/1.1 参考资料报告/智慧公路建设方案.md:
--------------------------------------------------------------------------------
1 | - [智慧公路建设方案(可下载) (qq.com)](https://mp.weixin.qq.com/s/LingrIQf8fQLEJ0KLzuv7A)
2 |
3 | 智能公路系统是建有通信系统、监控系统等基础设施,并对车辆实施自动安全检测、发布相关的信息以及实施实时自动操作的运行平台,它为实现智能公路的运输提供更为安全、经济、舒适、快捷的基础服务,以达到减少交通挤塞和事故的目的。
4 |
5 | 2018年2月,交通运输部办公厅发布《关于加快推进新一代国家交通控制网和智慧公路试点的通知》,覆盖北京、河北、吉林、江苏、浙江、福建、江西、河南、广东。
6 |
7 | 2021年8月,交通运输部印发《交通运输领域新型基础设施建设行动方案(2021—2025年)》方案指出,到2025年,打造一批交通新基建重点工程,形成一批可复制推广的应用场景,制修订一批技术标准规范,促进交通基础设施网与运输服务网、信息网、能源网融合发展,精准感知、精确分析、精细管理和精心服务能力显著增强,智能管理深度应用,一体服务广泛覆盖,交通基础设施运行效率、安全水平和服务质量有效提升。主要任务方面,包括智慧公路建设行动、智慧航道建设行动、标准规范完善行动等。
8 |
9 | 随着我国智慧公路的建设,各地也分别发布了一些列智慧公路指南:
10 |
11 | - 北京市《智慧高速公路建设指南》(征求意见稿)
12 | - 云南省智慧高速公路建设指南(试行)(2022年版)
13 | - 浙江省 智慧高速公路建设指南(暂行)
14 | - 江苏智慧高速公路建设技术指南
15 | - 山东省《智慧高速公路建设指南(试行)》
16 | - 上海嘉定区《智慧道路建设技术导则》
17 | - 智慧高速公路第1-4部分:总体技术要求
18 | - 中国智能交通协会团标《智慧高速公路分级》征求意见稿
19 | - 《宁夏公路网智能感知设施建设指南(试行)》
20 |
21 | 本方案是智慧公路的建设方案,实现了部分智慧公路功能,也对智慧公路上如何进行车路协同进行了初步探讨。
--------------------------------------------------------------------------------
/3.7 路网管理/1. 路网数字化/佳都科技:路网平台.md:
--------------------------------------------------------------------------------
1 | ## 可计算的数字路网平台
2 |
3 | 城市交通大脑构建了一个可计算路网模型,基于交通语义的关系表达和计算技术的支撑,将所有的交通设施、规则、控制策略都被数字化、信息化,并以能够为计算机所理解的形式计算、查阅、存储。
4 |
5 | 可计算的道路交通网络模型能够满足对交通路网精细化表达的需求,具体体现:
6 |
7 | - 能够准确地描述复杂路网的线形地物,包括各种立体交叉。
8 |
9 | - 建立道路之间的拓扑连接关系。
10 |
11 | - 描述车道的属性和同一路段中相邻车道之间的拓扑连接关系,建立车道与道路的对应关系。
12 |
13 | - 能够支持对交叉口和道路中细化到车道的交通组织的表达,描述交叉口入口与出口的车辆连接关系。
14 |
15 | - 描述路网中的要素的时间状态,以描述动态事件。
16 |
17 | 通过描述上述实体及其关系,交通路网模型能为交通运行管理提供:
18 |
19 | | 管理对象的基础路网数据描述 | 管理过程中的交通运行数据组织与管理 |
20 |
21 | | 管理结果数据与路网具体评价对象的关联展现 |
22 |
23 | 在可计算道路交通网络模型的基础上:
24 |
25 | | 能够加载数据和业务 | 实现路网的全表达 | 数据的层级联动 | 系统集成的全支撑 |
26 |
27 |
--------------------------------------------------------------------------------
/3.8 智慧社区/智慧社区大屏可视化管理系统.md:
--------------------------------------------------------------------------------
1 | - [智慧社区大屏可视化管理系统](https://www.aisoutu.com/a/154496)
2 |
3 |
4 |
5 | 
6 |
7 | 
8 |
9 | 
10 |
11 | 
12 |
13 | 
14 |
15 | 
16 |
17 | 
18 |
19 | 
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | 
28 |
29 | 
30 |
31 | 
32 |
33 | 
34 |
35 | 
--------------------------------------------------------------------------------
/4.3 智慧园区/科睿 x 智慧园区.md:
--------------------------------------------------------------------------------
1 | [科睿 x 智慧园区](http://www.cre-web.com/?p=1442)
2 |
3 | 智慧城市运用信息和通信技术手段感测、分析、整合城市运行核心系统的各项关键信息,从而对包括公共安全、城市服务、工商业活动在内的各种需求做出智能响应。
4 |
5 |  
6 |
7 | ▲科睿 x 莘庄商务区 | 园区土地建设及规划
8 |
9 | 在智慧城市这一概念的引导下,智慧园区成为其建设的先行者。
10 |
11 | 作为智慧城市在一个小区域范围内的缩影,它既反应了智慧城市的主要体系模式与特征,又具备了一定不同于智慧城市的发展的独特性。
12 |
13 | 
14 |
15 |
16 |
17 | ------
18 |
19 | **“智慧” 渗透 :****从信息化到智慧化**
20 |
21 | 智慧园区的重点在于“智慧”,通过信息技术,将“智慧”渗透到园区建设与运营的每个细节,加强园区业务、服务和管理能力,维持园区的可持续性发展,为园区铸就超强的软实力。
22 |
23 | 
24 |
25 | ▲科睿x莘庄商务区 | 能源应用情况
26 |
27 | 信息化建设作为智慧园区建设的手段,以迅捷的信息采集、高速的信息传输、高度集中的计算,实现园区内及时、互动、整合的信息感知、传递和处理。
28 |
29 | 
30 |
31 | ▲科睿x莘庄商务区 | 道路交通情况
32 |
33 | 而智慧园区在信息化的基础上,更重要的是实现智慧化。通过物联网、云计算、大数据、面向服务的架构等关键技术,对信息进行智慧响应,将园中分散的信息基础设施、社会基础设施和商业基础设施等有效连接起来。
34 |
35 | 
36 |
37 |
38 |
39 | ------
40 |
41 | **“智慧”发展 :** **从资源协调到智慧发展**
42 |
43 | 有了“智慧”,智慧园区将不仅仅停留在数字化层面,而是完美的协调人、园区、城市等彼此的关系,优化资源配置,实现以人为本、全面感知、内在发展。
44 |
45 | 
46 |
47 | ▲科睿x莘庄商务区 | 智能楼宇
48 |
49 | 智慧园区将以人的需求作为出发点,通过智慧的泛在信息源,实现资源、服务、管理等信息之间的无缝连接、协调联动,形成具有持续创新发展的内生驱动力量。并以这种内生的发展动力,实现自我适应调节、优化和完善,构成智慧城市的基石。
50 |
51 | 
--------------------------------------------------------------------------------
/4.4 智慧政务/基于大数据技术的政务大脑.md:
--------------------------------------------------------------------------------
1 | [基于大数据技术的政务大脑](https://www.cnblogs.com/shengya/p/14849563.html)
2 |
3 | 行业领先的政务互联网数据管理平台。 助力静安区政府打造的静安政务管理系统,以“3D城市”为载体,实现了不同维度的政务数据的可视化与交互管理,并从多视角、多层次剖析数据,展现出一个数据详实的“数字静安”,辅助政府管理部门进行有效、快捷的决策,做到用数据智能推进城市精细化管理,让政务服务更有温度,让市民生活更加便捷。
4 |
5 | 运营监控
6 |
7 | 通过传感器、摄像头等城市物联网设备的接入,在一体化的数字场景中实现全天候的实时监测。
8 |
9 | 
10 |
11 | 仿真规划
12 |
13 | 通过对接城市数据中台,结合AI、云计算等信息技术,用可视化的直观形式呈现更加科学的城市发展规划。
14 |
15 | 
16 |
17 | 社会治理
18 |
19 | 通过对接城市数据中台,用可视化的直观形式呈现更加科学的城市发展规划。
20 |
21 | 
--------------------------------------------------------------------------------
/4.6 智能运输物流/千寻位置-智慧物流解决方案.md:
--------------------------------------------------------------------------------
1 | - [智慧物流解决方案](https://www.qxwz.com/lp/wuliu)
2 |
3 | # 智慧物流解决方案
4 |
5 | 随着物流产业发展,大量物流企业和部门主动从技术装备、业务模式等方面改革与优化。千寻位置利用北斗高精度定位、大数据、物联网等新技术构建具有竞争力的物流解决方案,强化数据连接,致力于提高物流企业的营运管理能力。
6 |
7 | # 行业痛点
8 |
9 | 平台难以支撑高并发接入
10 |
11 | 物流平台涉及海量数据同时并发接入,包括车辆状态信息、位置信息、环境感知,人车行为数据等;物流企业随着业务发展逐渐增大,难以承受高并发冲击。
12 |
13 | 缺乏自主应用,开发效率低
14 |
15 | 物流企业缺乏或者开发自主应用成本高、效率低,无法实现快速开发、易于部署,简单管理而无须考虑基础设施、数据处理的能力。
16 |
17 | 海量数据难以挖掘价值
18 |
19 | 物流管理应用汇聚了海量数据,传统物流企业缺乏有效手段来充分挖掘数据的价值,让数据指导企业进行业务创新和提升运营效率。
20 |
21 | 商业决策缺乏数据依据
22 |
23 | 无法对物流企业进行决策支持,无法满足物流轨迹分析,需要生命周期的跟踪与分析,运输路径优化、运营分析等。
24 |
25 | # 解决方案框架
26 |
27 | 
28 |
29 | # 方案优势
30 |
31 | 海量接入
32 |
33 | 平台支持传输协议(TCP、HTTP、MQTT),业务协议(NGTP、JT/T808、G32960及私有协议插件),持用户OSGI协议编解码插件的加载,随车辆接入数弹性扩展
34 |
35 | 安全可靠
36 |
37 | 通过千寻位置自主研发的定位算法及云、端、图一体化服务,融合室内外定位技术,解决终端定位设备在卫星信号丢失情况下的定位问题,实现定位无死角。
38 |
39 | 高精度位置能力
40 |
41 | 内置千寻位置北斗高精度定位服务,车道级定位无死角,全程跟踪车辆位置,运营范围的管控更准确。
42 |
43 | 扩展空间
44 |
45 | 面向车企智能网联领域,千寻位置基于云、边、端能力,帮助客户保护数字安全,支持面向未来车路协同、自动驾驶等智能化平台升级。
--------------------------------------------------------------------------------
/5.1 智慧旅游/基于GIS的全域智慧旅游平台.md:
--------------------------------------------------------------------------------
1 | [基于GIS的全域智慧旅游平台](https://www.cnblogs.com/shengya/p/14845745.html)
2 |
3 | 该项目 基于 大数据交互管理系统,为 综合实验区 游客服务中心打造的全域智慧旅游管理平台, 集成游客综合服务体系、旅游综合管理体系、旅游大数据应用体系业务数据,整体展现 的文化旅游现状,并提供多维度大数据分析和展示,助力 打造世界著名的国家化旅游群岛。
4 |
5 | 运营升级
6 |
7 | 通过对景区数据、LBS数据、游客数据的接入管理,实现景区、景点、游客的无缝连接,助力运营决策。
8 |
9 | 
10 |
11 | 场景还原
12 |
13 | 凭借数字孪生技术,可以在数字场景中高精度3D还原景区景点全景,让用户突破时空限制,畅享“云”游。
14 |
15 | 
16 |
17 | 互动强化
18 |
19 | 融合3D、AR、VR等新一代图形技术,并通过移动设备触达用户,解锁5G时代下文旅行业的更多玩法。
20 |
21 | 
--------------------------------------------------------------------------------
/6.1 高精度地图/基于高精度地图的车路协同智能交通系统.md:
--------------------------------------------------------------------------------
1 | 
2 |
3 | 
4 |
5 | 
6 |
7 |
8 |
9 | 
10 |
11 | 
12 |
13 | 
--------------------------------------------------------------------------------
/6.1 高精度地图/高德地图/基于北斗卫星导航系统,高德车道级导航正式发布.md:
--------------------------------------------------------------------------------
1 | - [基于北斗卫星导航系统!高德车道级导航正式发布](https://news.cnblogs.com/n/704701/)
2 |
3 | 10 月 26 日消息,近日高德地图正式上线了车道级导航高清版,致力于将传统的地图导航体验提升至新层级。
4 |
5 | 当前车道级导航可在高德地图 APP 的“设置”中选择开启和关闭,从对产品体验的程度看,绝非是简单的功能升级,而是技术上的全面革新。
6 |
7 | 据介绍,相较传统地图导航,高德车道级导航最大的不同在于:利用高清渲染技术,在屏幕上最大程度地还原真实道路场景,包括当前道路的车道数量、地面标识标线、出入口、特殊车道等。
8 |
9 | 同时应用北斗系统亚米级的高精度定位,实现定位精度从5-10 米的道路级,进化到亚米的车道级别,从而在某些特殊或复杂路口实现高精细的引导服务,全面提升导航体验。
10 |
11 | 
12 |
13 | 此次升级过后,如今基于市场上更多手机机型,高德地图在特定导航场景中,同样可以高清展示真实道路,显示当前道路的车道数量、地面标识标线、岔路口等;如果路段内有公交车道、长实线等需要驾驶员额外注意的标识时,则将会高亮显示,避免车辆违章。
14 |
15 | 据了解,自去年以来,高德地图车道级导航服务已先后在华为、小米、荣耀等数十款机型,以及苏州、杭州、重庆、广州、深圳、东莞、天津、成都等多个城市上线。
16 |
17 | 而本次高清版的上线,意味着高德车道级导航将全面覆盖市面上大部分主流的 iPhone 和安卓手机机型,以及全国超过 120 个城市的高速和快速路。
18 |
19 | 
--------------------------------------------------------------------------------
/6.1 高精度地图/高精度地图README.md:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/6.1 高精度地图/高精度地图README.md
--------------------------------------------------------------------------------
/6.2 数字孪生/华为出品:数字孪生城市报告(全文) .md:
--------------------------------------------------------------------------------
1 | - [华为出品:数字孪生城市报告(全文)](https://mp.weixin.qq.com/s/mWXgdpqlIivh4ft3h2MJMg)
2 |
3 |
4 |
5 | 数字孪生城市是现代化城市治理方式的创新性变革。物理城市中所有的人、地、物、事、情、组织等要素,借助数字孪生技术在数字世界建设虚拟映像,实现“物理- 数字”虚实融合交互,在物理世界不可能完成的工作,在数字世界则充满了丰富的想象空间。
6 |
7 |
8 |
9 | **1、**华为从项目实践中总结形成该白皮书,内容涉及数字孪生城市的内涵与外延、建设方法论、关键技术应用、体系框架等理论内容,结合项目实践提供典型案例的分享,对数字孪生城市的未来发展进行了适度展望。
10 |
11 |
12 |
13 | **2、华为数字孪生城市参考框架。**数字孪生城市多学科交叉融合的特征,是建设智慧城市的“一把双刃剑”,如运用好将成为智慧城市建设的利器,如过度消耗理念将为城市建设带来灾难,因此需要建立体系化的方法作为导引,并在实践中不断总结、优化,指导运用。
14 |
15 | 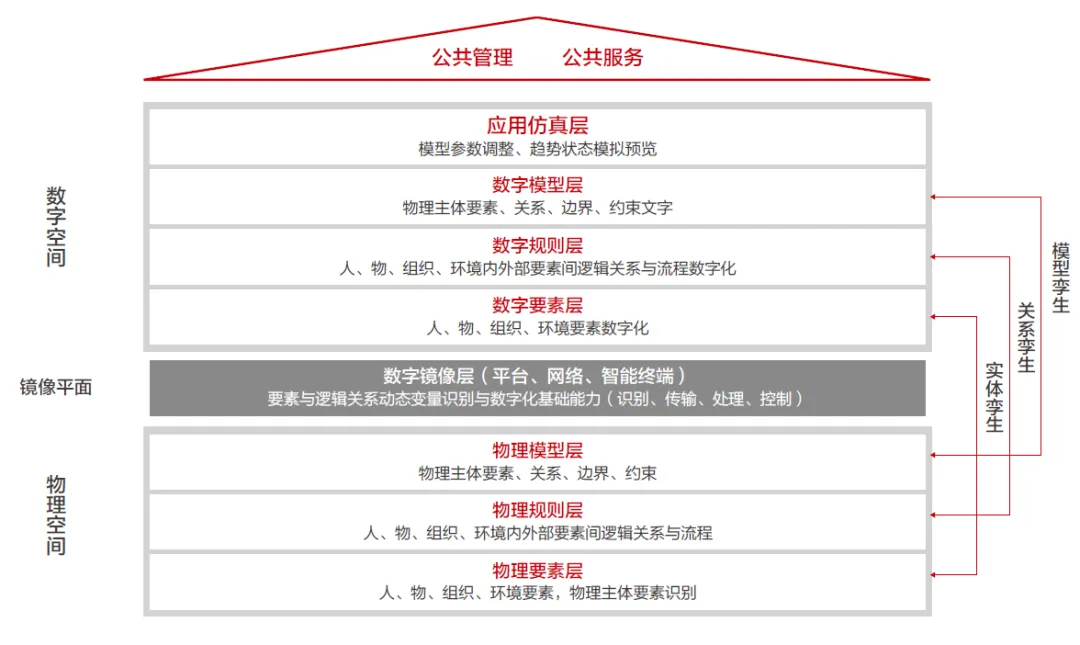
16 |
17 |
18 |
19 | **3、数字孪生城市数据框架。**围绕数字孪生城市数据体系建设和管理全过程,整合、集成和规范时空基础数据、工程建设项目数据、公共专题数据和物联网感知数据等数据资源,由按尺度分级的基础地理信息数据库向按地理实体分类的无尺度基础时空数据库转变,实现不同精度、不同层次、不同时相的地理实体数据集成,形成地上地下全域空间立体的三级数据框架体系,为数字孪生城市运行管理提供统一的数据底板。
20 |
21 | 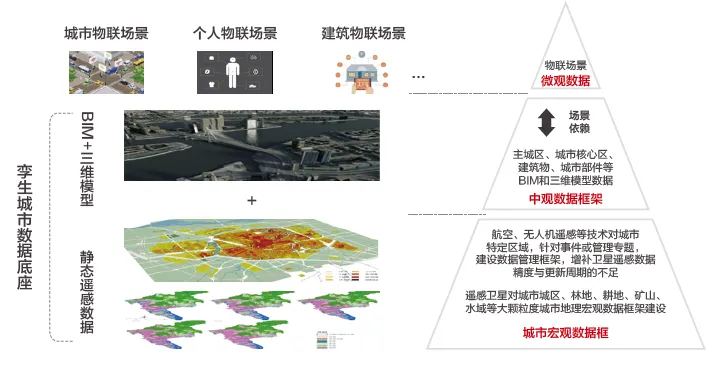
22 |
23 |
24 |
25 | **4、数字孪生城市平台能力。**数字孪生平台的核心架构以云为基础,联结无处不在的智能终端,以AI 为驱动,融合大数据、物联网、视频、地理信息等多种ICT 技术,以孪生数据服务、孪生应用服务和孪生集成服务为城市运行监测和城市仿真预测预警应用提供相应服务。
26 |
27 | 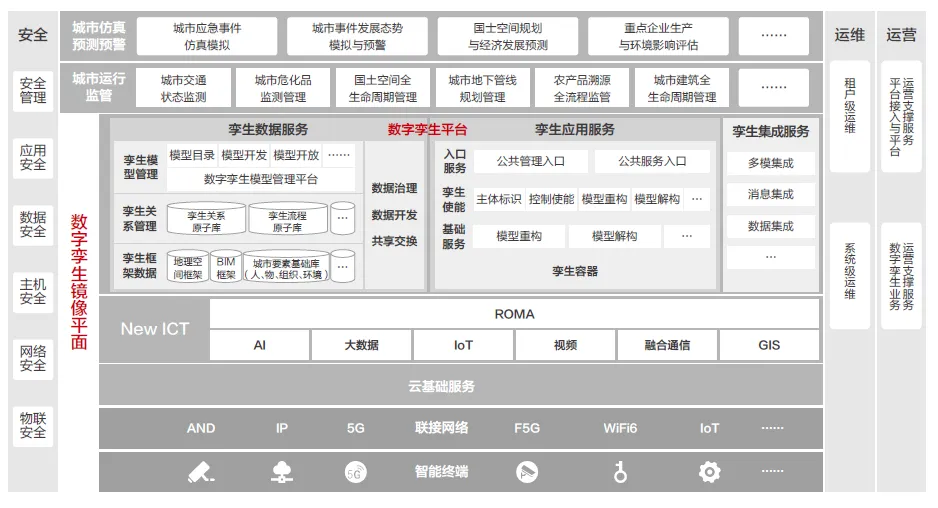
28 |
29 |
30 |
31 | **5、****数字孪生城市分级模型。**建立数字孪生城市应用能力分级评价模型,有助于各参与角色对齐数字孪生城市建设方向与阶段建设成果评估。我们通过研究数字孪生、人工智能、地理信息等技术路径的发展史,从物理空间与数字空间的数据关系、物理状态监测预测度、数字使能控制物理实体三个维度,总结归纳设置L0--L4 五级评估模型。
32 |
33 | 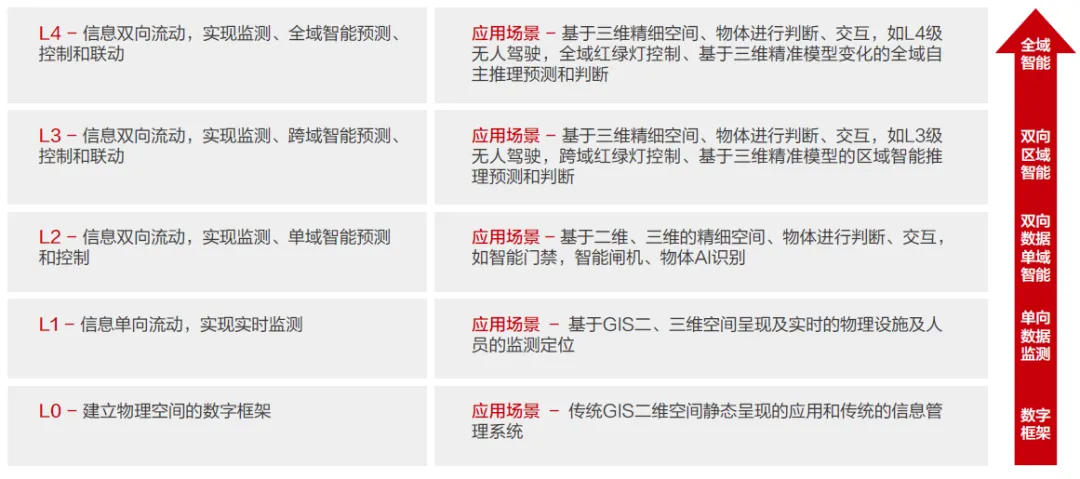
--------------------------------------------------------------------------------
/6.2 数字孪生/城市数字孪生:技术参考架构+关键技术+典型应用+标准体系(表).md:
--------------------------------------------------------------------------------
1 | - [城市数字孪生:技术参考架构+关键技术+典型应用+标准体系(表)](https://mp.weixin.qq.com/s/V3N9rPWxq75qMjjrsHaDSQ)
2 |
3 | 当前,城市数字孪生已经发展成为支撑智慧城市的重要技术手段。城市数字孪生 通过在数字空间对城市物理空间和社会空间进行全要素表达、全过程呈现、全周期可 溯,实现城市全面感知、虚实交互、智能决策、精准控制,推动城市智能化、智慧化 发展……为做好城市数字孪生标准化工作整体规划,有序推动相关标准制定与应用实施工 作,全国信标委智慧城市标准工作组组建了城市数字孪生专题组,并联合相关单位编 制了《城市数字孪生标准化白皮书(2022版)》。
4 |
5 | 1、本白皮书在 系统研究城市数字孪生内涵、典型特征、相关方等基础上,构建了城市数字孪生技术 参考架构,并梳理了城市数字孪生关键技术和典型应用场景。
6 |
7 | 2、本文总结了城市数字 孪生发展现状、发展趋势、面临的问题与挑战及国际国内标准化现状。
8 |
9 | 3、 本白皮书探索形成了“城市数字孪生标准体系总体框架(1.0版)”,并提出了拟研制 标准建议和标准化工作建议。本白皮书构建了城市数字孪生标准化路线图,为后续相 关标准研制、应用实施指明了方向。
10 |
11 | **4、城市数字孪生相关方。**涉及城市数字孪生咨询服务提供方、城市数字孪生建设技术提供方、城市数字孪生运营服务方。
12 |
13 | **5、技术参考架构。**在白皮书图一城市数字孪生概念模型基础上,本白皮书进一步从技术实现角度构建了城市数字孪生技术参考架构。
14 |
15 | 
16 |
17 | **6、关键技术。**城市数字孪生丰富的内涵和特征决定了它的实现具有高度复杂性,涉及一系列复杂技术。其中,感知互联、实体映射、多维建模、时空计算、仿真推演、可视化、虚实交互七个方面的相关技术构成了城市数字孪生关键技术体系。此外,城市数字孪生也离不开基础网络、5G、大数据、人工智能、云计算、区块链等相关技术的支撑。
18 |
19 | **7、典型应用场景。**城市数字孪生典型应用场景主要包括城市规划、城市建设、城市治理、智慧园区、智慧交通、智慧能源等。
20 |
21 | **8、标准体系总体框架。**城市数字孪生标准体系总体框架(1.0 版)如图5 所示。根据图5 所示,城市数字孪生标准体系由“01 总体”“02 数据”“03 技术与平台”“04 安全”“05 运维/ 运营”“06应用”六部分的标准分体系组成。
22 |
23 | 
--------------------------------------------------------------------------------
/6.3 元宇宙/元宇宙:从架构到落地(应用场景、产业链分析) .md:
--------------------------------------------------------------------------------
1 | - [元宇宙:从架构到落地(应用场景、产业链分析)](https://mp.weixin.qq.com/s/t9XjQn6EGL6dDIAHIsROOA)
2 |
3 | 元宇宙的概念由科幻作家Neal Stephenson于1992年在其著作《雪崩》中首次提出;在小说中,Metaverse是一个脱胎于现实世界、又与现实世界平行、相互影响,并且始终在线的虚拟世界;它栩栩如生、让人沉浸其中,人们在这个虚拟世界中可以做吃饭、睡觉外的任何事。
4 |
5 | 当前的主流定义元宇宙是一个网络化的虚拟现实;人们表现为自己设计的“化身”,从事世俗的和非凡的活动,像在游戏中一样,人们居住并控制着在空间中移动的角色;人们在基础设施完善的虚拟世界中,可以和现实物理世界一样,全方位实现身份认同、货币交易、社区归属感到职业发展等个人和社会需求。
6 |
7 | 元宇宙是一个与现实世界平行且相互影响并且始终在线的虚拟世界,人们在基础设施完善的虚拟世界中,可以和现实物理世界一样,全方位实现身份认同、货币交易、社区归属感到职业发展等个人和社会需求。
8 |
9 | **1、发展元宇宙的意义:**元宇宙中的虚拟世界有可能不受现实世界中一般经济规律的限制,理论上资产是可新增、可创造的,叠加数字资产价值的重构,有可能极大的扩展人类的资源总量。元宇宙拥有与现实联通的完整经济系统,同时元宇宙拥有极大丰富的内容,这两者的结合将催生出新的消费需求,从而诞生出新的商业业态。元宇宙降低了地理、生理等现实因素对人类生活方式的限制,且与现实世界共生,未来有可能重塑每个人的生活方式。
10 |
11 | **2、元宇宙应用场景:**(1)游戏作为现实世界的模拟和延申,有可能成为元宇宙最先应用的场景。(2)元宇宙丰富或重塑了陌生人和熟人社交的场景和体验。(3)影视、音乐、动漫等内容产业将在元宇宙迎来升级。(4)元宇宙拓宽消费场景,重塑数字资产价值。
12 |
13 | **3、元宇宙的产业链:**3.1元宇宙产业链划分一:七个层次:体验层、发现层、创作者经济层、空间计算层、去中心化层、人机交互层、基础设施层。3.2元宇宙产业链划分二:四大板块:硬件板块、软件板块、服务板块、应用及内容板块。3.2元宇宙的技术底座:网络环境-虚实界面-数据处理-认证机制-内容生产。
14 |
15 |
--------------------------------------------------------------------------------
/6.4 北斗定位/北斗系统在交通运输行业应用现状及展望PPT.md:
--------------------------------------------------------------------------------
1 | - [北斗系统在交通运输行业应用现状及展望PPT(可下载) (qq.com)](https://mp.weixin.qq.com/s/o_6IBPkL_-MrDf0dLBwt9w)
2 | - [北斗+5G在交通运输行业的应用现状PPT(可下载) (qq.com)](https://mp.weixin.qq.com/s/30NrTcXWzWR0eYaRlOLtXA)
3 |
4 | 2018年1月,交通运输部与中央军委装备发展部联合印发《北斗卫星导航系统交通运输行业应用专项规划(公开版)》(交规划发〔2017〕187号)。《专项规划》是“十三五”至“十四五”期推进北斗系统在行业应用的指导性文件,明确了今后一个阶段行业北斗系统应用工作的发展目标和主要任务,有力提升行业北斗系统应用规模及水平,进一步发挥交通运输行业在北斗系统应用推广方面的带动作用。
5 |
6 | 此后交通部印发的《交通运输领域新型基础设施建设行动方案(2021—2025年)》、数字交通“十四五”规划等都将北斗卫星导航系统作为一项重要的基础设施工程纳入其中。
7 |
8 |
--------------------------------------------------------------------------------
/7.1 物联网/EMQ/EMQ车路协同.md:
--------------------------------------------------------------------------------
1 | - [V2X | EMQ 物联网解决方案 (emqx.com)](https://www.emqx.com/zh/use-cases/v2x)
2 |
3 | 随着 C-V2X、MEC 及 5G 技术快速发展,汽车驾驶也将逐渐从单车智能走向车路协同的自动驾驶。随之而来的是海量连接、超高吞吐、超低时延和高安全性的智能网联化场景需求。实现“人-车-路-云“的信息高效协同,将极大推动智能网联汽车快速发展,提供更安全、更智能的出行方式,同时赋能智能路况综合感知、动态协同交通控制等功能,为智能交通发展奠定基础。
4 |
5 | ## 挑战
6 |
7 | - 海量车载单元、路侧单元接入
8 |
9 | 新一代的车路协同场景有海量的设备参与,需要解决海量的车机 OBU 和路侧 RSU 设备的安全接入能力。
10 |
11 | - V2X 消息高可靠、低时延通信
12 |
13 | 车路协同场景消息通讯及业务处理都对时延高度敏感,V2X 消息转发需解决车路消息ms级的低时延可靠传输。
14 |
15 | - 端到端的消息追踪和流计算处理需求
16 |
17 | 解决车路协同的消息编解码和高效的多数据流协同计算能力,方能实现更多 V2X 的特定场景。
18 |
19 | ## 方案
20 |
21 | EMQ 为车联网场景提供 MEC、Cloud 二级分布式部署架构,基于 5G 网络切片能力,通过个人子车系、车辆子系统和路侧单元就近接入实现超低时延的交通信息服务。通过 MQTT、JT808、TCP 等协议将车端、路侧设施感知到的路况信息推送到云控平台,通过云控平台融合 V2X 算法实现道路协同感知、安全提醒、远程协同控制等智能交通场景。
22 |
23 | 支持国际标准的 TLS/DTLS 加密或国密算法 GMSSL 加密,通过扩展基于 PKI/CA 证书认证体系保障车路信息系协同的安全通信。
24 |
25 | 强大的规则引擎和流计算引擎实现 V2X 消息处理与告警事件实时触发,同时通过规则引擎的编解码能力进行 V2X 协议栈解析,提升云控平台消息处理效率。
26 |
27 | 
28 |
29 | ## 成果
30 |
31 | - EMQ 基于 5G+MEC +V2X 的车路协同方案有效满足了车-路与云端的海量连接、超低时延、超大吞吐和安全高可用的信息服务需求,广泛应用到国家多个车路协同示范先导区和地区级的智能网络车路协同示范区。
32 | - EMQ 为客户提供成熟的云边协同基础架构,客户可基于此架构快速实现 V2X 平台的构建。
--------------------------------------------------------------------------------
/7.1 物联网/ThingsBoard/ThinsBoard相关资料.md:
--------------------------------------------------------------------------------
1 | ThingsBoard资料:https://www.cnblogs.com/iotschool/category/1653991.html?page=1
2 |
3 | 贴吧:https://tieba.baidu.com/f?kw=thingsboard
4 |
5 | IOTSchool云腾社区:https://www.iotschool.com/topics
6 |
7 |
--------------------------------------------------------------------------------
/7.1 物联网/ThingsBoard/系列/0. CSDN 那我格子衫来 ThingsBoard教程.md:
--------------------------------------------------------------------------------
1 | CSDN地址:https://blog.csdn.net/github_35631540/category_10844433.html
2 |
3 |
4 |
5 | - [ThingsBoard教程(一):ThingBoard介绍及安装](https://www.ebaina.com/articles/140000005511)
6 | - [ThingsBoard教程(二):租户,租户配置,部件组模块的使用](https://www.ebaina.com/articles/140000005529)
7 | - [ThingsBoard教程(三):系统设置模块的使用](https://www.ebaina.com/articles/140000005540)
8 | - [ThingsBoard教程(四):规则链简介与操作](https://www.ebaina.com/articles/140000005559)
9 | - [ThingsBoard教程(五):客户,资产管理](https://www.ebaina.com/articles/140000005566)
10 | - [ThingsBoard教程(六):设备管理](https://www.ebaina.com/articles/140000005577)
11 | - [ThingsBoard教程(七):模拟设备遥测](https://www.ebaina.com/articles/140000005587)
12 | - [ThingsBoard教程(八):自定义UI](https://www.ebaina.com/articles/140000009908)
13 | - [ThingsBoard教程(九):前端架构分析](https://www.ebaina.com/articles/140000010056)
14 | - [ThingsBoard教程(十):前端初级定制化](https://fizzz.blog.csdn.net/article/details/115397351)
15 | - [ThingsBoard教程(十一):部件库的入门知识](https://fizzz.blog.csdn.net/article/details/118543080)
16 | - [ThingsBoard教程(十二):部件库中使用echarts](https://fizzz.blog.csdn.net/article/details/118702693)
17 | - [ThingsBoard教程(十三):部件的基本API解释](https://fizzz.blog.csdn.net/article/details/118901156)
18 | - [ThingsBoard教程(十四):部件库基本JS函数API解释,及变量的使用,显示](https://fizzz.blog.csdn.net/article/details/118904101)
19 | - [ThingsBoard教程(十五):部件库的点击事件](https://fizzz.blog.csdn.net/article/details/119061197)
20 | - [ThingsBoard教程(十六):制作RPC部件](https://fizzz.blog.csdn.net/article/details/119649292)
21 | - [ThingsBoard教程(十七):自定义开发时间图表](https://fizzz.blog.csdn.net/article/details/119677483)
22 |
23 |
--------------------------------------------------------------------------------
/7.1 物联网/拓维泛物联网平台.md:
--------------------------------------------------------------------------------
1 | - 拓维泛物联网平台
2 |
3 | ## 什么是物联网?
4 |
5 | 通过互联网等通信技术把传感器、控制器、机器、人员和物等通过新的方式联系在一起,形成人与物、物与物相联。实 现在任何时间、任何地点,人、机、物的互联互通(即“万物互联”),达到对设备的远程管理和智能控制,及产品可追溯。
6 |
7 | ## 物联网的应用场景
8 |
9 | 
10 |
11 | ## 拓维泛物联网平台解决方案
12 |
13 | 
14 |
15 | ## 拓维泛物联网平台产品能力
16 |
17 | 
18 |
19 | ## 让“物”说一种话
20 |
21 | 
22 |
23 | 
24 |
25 | 
26 |
27 | ## 平台安全,构筑端、边、管、云的安全可信防御体系
28 |
29 | 
--------------------------------------------------------------------------------
/7.1 物联网/物联网产业链梳理.md:
--------------------------------------------------------------------------------
1 | - [物联网产业链梳理](https://mp.weixin.qq.com/s/GFKkuVtFm_jdCfbC7AW2Jw)
2 |
3 |
--------------------------------------------------------------------------------
/7.2 工业互联网/赛迪出品:工业互联网平台数字仿真报告2021 .md:
--------------------------------------------------------------------------------
1 | - [赛迪出品:工业互联网平台数字仿真报告2021](https://mp.weixin.qq.com/s/qj390F1h9AQr0JiZdxjS8g)
2 |
3 | 白皮书分主要内容:“平台 +数字仿真 ”发展现状、 “平台 +数字仿真 ”趋势展望、 “平台 +数字仿真 ”内涵特征 以及 “平台 +数字仿真 ”架构体系共 四个部分 。本白皮书中,“平台 ”是指基于工业互联网平台或工业云平台的通用研发平台 “数字仿真 ”是指广义的基于信息技术实现的仿真。 1、“平台 +数字仿真 ”发展现状该部分主要介绍了国际、 国内 “平台 +数字仿真 ”方面的发展现状以及该领域的创新探索。从整体、技术、企业、生态等维度对国际和国内数字仿真行业发展现状进行了梳理,通过对比呈现出国内外数字仿真领域的巨大差距。 2、“平台 +数字仿真 ”趋势展望该部分主要给出了“平台 +数字仿真 ”的发展趋势研判。从技术供给、应用范围、产业生态三个角度分析发展趋势。从技术供给看,呈现部署方式云化、服务形态 APP化、新兴技术融合化趋势。从应用推广看,使用用户普惠化、覆盖行业多元化、应用场景复杂化将成为发展趋势。从产业生态看,开发范式自主化、开发环境开源化、开发主体协同化将成为发展趋势。 3、“平台 +数字仿真 ”定义内涵该部分主要剖析了“平台 +数字仿真 ”的定义内涵 。结合专家 、 学者以及企业代表对仿真的定义 指明 “平台 +数字仿真 ”是 基于工业互联网平台的资源、渠道和能力,构建 仿真模型进行模拟实验,开展平台化仿真服务的过程。模型解耦重构是基础 平台开放共享是核心 新型能力打造是关键 。随着“平台 +数字仿真 ”的快速兴起 将对制造业起到提效率 、 降成本、优流程等作用。 4、“平台 +数字仿真 ”架构体系该部分主要介绍了“平台 +数字仿真 ”架构体系 可概括为“一 二 二三三 即一个 基于工业互联网平台的 通用研发平台系统仿真、实物仿真两 大 体系 ,传统机理模型、 数据算法 模型两类模型,模拟验证、预测评估、迭代优化三大功能,以及设备、产线、工厂三大作用领域。
4 |
5 |
--------------------------------------------------------------------------------
/9.3 5G应用/5G-智慧交通典型应用场景及解决方案.md:
--------------------------------------------------------------------------------
1 | - [5G-智慧交通典型应用场景及解决方案](https://mp.weixin.qq.com/s/9N3iCjUjUPVF-FZJW-LFuQ)
2 |
3 | 本文(白皮书)从智慧交通行业现状及发展趋势出发分析行业存在的问题,并结合以 5G 为代表的新技术,提出了 5G+ 智慧交通典型业务场景,并针对业务场景需求给出了相应的整体解决方案,并就方案的落地实践效果做了阐述,最后对整个 5G+ 智慧交通做了概述并描绘了未来发展蓝图。
4 |
5 | 本文部分内容摘要:
6 |
7 | **1、赋能智慧交通的5G 关键技术。** 5G网络在 智慧 交通领域赋能的主要关键技术包括 高性能无线接入技术 、 多接入边缘计算 和 端到端网络切片 3 个方面。其中无线接入技术的提升作为 5G 网络能力的关键基础技术,基于空口的灵活配置与大规模天线的应用,实现 ITUeMBB 、 ITU uRLLC 场景在交通领域的实践;网络切片保障业务的通信性能,多接入边缘计算使能边缘感知与计算体系,以 5G网络为桥梁搭建感知计算体系。
8 |
9 | **2、智慧交通典型应用场景。** 《交通运输政务信息资源目录编制指南(试行)》对交通业务领域进行了划分,主要包含民用铁路交通、水路交通、道路交通、道路运输、城市客运、交通管控、城市停车等 7 个业务领域。本白皮书结合当前行业发展热点方向及新技术融合思路,探索 5G 等新兴 I CT 技术 在 交通基础设施建设与改造场景(车联网场景、智慧灯杆等)、 面向交警的 交通巡检场景(重点区域交通状况巡检、桥梁隧道与边坡的维养巡检、交通工程建设巡检)、 面向交管部门的 监管场景(公交监管场景、重点营运车辆监管)、 面向运营主体和公安的 管控场景应用 (交通枢纽管控、高速公路管控、机场 管控、轨道交通管控、港口管控和临时应急管控)、面向交警与交通的交通执法场景以及面向社会公众的出行场景的应用情景 。
10 |
11 | **3、智慧交通典型解决方案。** 本白皮书围绕典型智慧交通典型应用场景, 充分结合 5G 、边缘计算、无人机、人工智能、物联网等一批先进 I CT 技术的特点, 从实践出发抛砖引玉,探索智慧交通 领域 中 面向道路基础设施的数字道路解决方案( 5G+ 车联网方案和多功能智慧灯杆解决方案),面向交通状况及交通基础设施的智慧巡检方案(基于5G+ 无人机的重点交通状态巡检方案、基于 5G+ 无人机的桥梁、边坡及隧道维养巡检方案和基于 5G+ 无人机的交通工程巡检方案), 面向营运车辆的交通监管方案( 5G+ 公交监管、 5G+ 重点 营运车辆监管 、面向 运营主体 的智慧管控方案5G+ 重点交通枢纽管控方案、 5G+ 高速公路管控方案、 5 G+ 机场管控方案、5G+ 轨道交通管控方案、 5G+ 港口管控方案、 5G+ 交通应急管控方案)、面向交警和交管执法的智慧执法方案以及面向社会公众的智慧出行方案。
12 |
13 | 以下为推荐广东省电信规划设计院有限公司、华南理工大学土木与交通学院、广东省交通规划设计研究院集团股份有限公司、数字广东网络建设有限公司发布的报告全文,供行业参考。
--------------------------------------------------------------------------------
/9.4 碳达峰、碳中和/.keep:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/9.4 碳达峰、碳中和/.keep
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2021 爱是与世界平行
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
22 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | 整理有关智慧城市相关的建设方案、国家标准、国家规范、解决方案和参考资料等,相关内容大多来源于互联网,收集整理方便项目经理、产品经理、相关领域从事者使用。因为个人从事四年都是在交通行业,主要是交通、智慧公路、智慧高速、公交优先、车路协同等的研究。所以将相关内容进行整理,方便查找和使用,同时也分享给有需要的人进行使用。
2 |
3 | 因为内容都是基于Markdown进行整理的,所以推荐使用Markdown工具进行阅读。
4 |
5 |
6 |
7 | # 一、推荐阅读工具
8 |
9 | Typora:一款轻便简洁的Markdown编辑器
10 |
11 | 官网地址:https://www.typora.io/
12 |
13 | 
14 |
15 | # 二、如何使用
16 |
17 | 1. 克隆文档到本地:``git clone https://github.com/enryteam/smart-city.git`
18 | 2. 推荐使用Typora打开文件夹的方式打开,并设置Typora视图显示文件树
19 |
20 | 
21 |
22 |
23 |
24 | 效果如下:
25 |
26 | 
27 |
28 | # 三、整理相关内容
29 |
30 | 
31 |
32 |
33 |
34 | **目前个人重点研究对象:车路协同、智慧高速、智慧交通、智能网联车、车路协同云控平台。**
35 |
36 | # 说明:
37 |
38 | - 整理资源不易,目前主要从事车路协同、交通行业的相关工作,所以每天都会阅读相关资料,为了方便快速查阅,才进行了总结。
39 | - 欢迎智慧交通领域、智慧公路、公交优先、智慧高速、车路协同的朋友共同交流。
40 |
41 |
42 | 本站文章引用或转载写明来源,感谢原作者的辛苦写作,如果有异议或侵权,及时联系我处理,谢谢!
43 |
44 |
45 |
46 |
47 |  48 |
49 | 我们从“大产业”中“小场景”出发着眼于“解决用户痛点”期望通过产品项目化实施,降本增效达到20%以上,并缩短开发周期70%。在这个价值观驱动下,深度整合我们已有的“数据采集+数字孪生+AI大模型”软硬件系列产品线来重新定义“孪生体”并开发出一款名为“zctechX”的数字化中心平台产品。zctechX同时支持B/S和C/S架构,旨在通过数据采集、数字孪生和AI大模型等技术帮助用户实现智能运营、设备健康管理、能效优化以及质量预测等目标。
50 |
51 |
52 |
48 |
49 | 我们从“大产业”中“小场景”出发着眼于“解决用户痛点”期望通过产品项目化实施,降本增效达到20%以上,并缩短开发周期70%。在这个价值观驱动下,深度整合我们已有的“数据采集+数字孪生+AI大模型”软硬件系列产品线来重新定义“孪生体”并开发出一款名为“zctechX”的数字化中心平台产品。zctechX同时支持B/S和C/S架构,旨在通过数据采集、数字孪生和AI大模型等技术帮助用户实现智能运营、设备健康管理、能效优化以及质量预测等目标。
50 |
51 |
52 |  53 |
54 |
55 |
56 |
--------------------------------------------------------------------------------
/自动化脚本.bat:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/自动化脚本.bat
--------------------------------------------------------------------------------
53 |
54 |
55 |
56 |
--------------------------------------------------------------------------------
/自动化脚本.bat:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/enryteam/smart-city/52134130f728baf556e1ca5b952fb47c8616e71f/自动化脚本.bat
--------------------------------------------------------------------------------