├── .cproject
├── .gitignore
├── .project
├── .settings
├── com.atollic.truestudio.debug.hardware_device.prefs
├── language.settings.xml
└── org.eclipse.cdt.managedbuilder.core.prefs
├── LICENSE
├── Libraries
├── CMSIS
│ ├── CMSIS END USER LICENCE AGREEMENT.pdf
│ ├── Device
│ │ └── ST
│ │ │ └── STM32F10x
│ │ │ ├── Include
│ │ │ ├── stm32f10x.h
│ │ │ └── system_stm32f10x.h
│ │ │ └── Release_Notes.html
│ ├── Include
│ │ ├── arm_common_tables.h
│ │ ├── arm_math.h
│ │ ├── core_cm3.h
│ │ ├── core_cmFunc.h
│ │ └── core_cmInstr.h
│ ├── README.txt
│ └── index.htm
├── grbl
│ ├── config.h
│ ├── coolant_control.c
│ ├── coolant_control.h
│ ├── cpu_map.h
│ ├── defaults.h
│ ├── eeprom.c
│ ├── eeprom.h
│ ├── examples
│ │ ├── grblUpload
│ │ │ ├── grblUpload.ino
│ │ │ └── license.txt
│ │ └── grblWrite_BuildInfo
│ │ │ ├── grblWrite_BuildInfo.ino
│ │ │ └── license.txt
│ ├── gcode.c
│ ├── gcode.h
│ ├── grbl.h
│ ├── jog.c
│ ├── jog.h
│ ├── limits.c
│ ├── limits.h
│ ├── main.c
│ ├── motion_control.c
│ ├── motion_control.h
│ ├── nuts_bolts.c
│ ├── nuts_bolts.h
│ ├── planner.c
│ ├── planner.h
│ ├── print.c
│ ├── print.h
│ ├── probe.c
│ ├── probe.h
│ ├── protocol.c
│ ├── protocol.h
│ ├── report.c
│ ├── report.h
│ ├── serial.c
│ ├── serial.h
│ ├── settings.c
│ ├── settings.h
│ ├── spindle_control.c
│ ├── spindle_control.h
│ ├── stepper.c
│ ├── stepper.h
│ ├── system.c
│ └── system.h
├── stm_lib
│ ├── inc
│ │ ├── misc.h
│ │ ├── stm32f10x_exti.h
│ │ ├── stm32f10x_flash.h
│ │ ├── stm32f10x_gpio.h
│ │ ├── stm32f10x_rcc.h
│ │ ├── stm32f10x_tim.h
│ │ └── stm32f10x_usart.h
│ └── src
│ │ ├── misc.c
│ │ ├── stm32f10x_exti.c
│ │ ├── stm32f10x_flash.c
│ │ ├── stm32f10x_gpio.c
│ │ ├── stm32f10x_rcc.c
│ │ ├── stm32f10x_tim.c
│ │ └── stm32f10x_usart.c
├── stm_usb_fs_lib
│ ├── inc
│ │ ├── usb_conf.hh
│ │ ├── usb_core.h
│ │ ├── usb_def.h
│ │ ├── usb_init.h
│ │ ├── usb_int.h
│ │ ├── usb_lib.h
│ │ ├── usb_mem.h
│ │ ├── usb_regs.h
│ │ ├── usb_sil.h
│ │ └── usb_type.h
│ └── src
│ │ ├── usb_core.c
│ │ ├── usb_init.c
│ │ ├── usb_int.c
│ │ ├── usb_mem.c
│ │ ├── usb_regs.c
│ │ └── usb_sil.c
├── usb
│ ├── CVS
│ │ ├── Entries
│ │ ├── Entries.Extra
│ │ ├── Entries.Extra.Old
│ │ ├── Entries.Old
│ │ ├── Repository
│ │ └── Root
│ ├── hw_config.c
│ ├── hw_config.h
│ ├── platform_config.h
│ ├── stm32f10x_it.h
│ ├── usb_conf.h
│ ├── usb_desc.c
│ ├── usb_desc.c.bak
│ ├── usb_desc.h
│ ├── usb_endp.c
│ ├── usb_endp.c.bak
│ ├── usb_istr.c
│ ├── usb_istr.h
│ ├── usb_prop.c
│ ├── usb_prop.h
│ ├── usb_pwr.c
│ └── usb_pwr.h
└── util
│ ├── CVS
│ ├── Entries
│ ├── Entries.Extra
│ ├── Entries.Extra.Old
│ ├── Entries.Old
│ ├── Repository
│ └── Root
│ ├── stm32eeprom.h
│ └── stm32f10x_it.c
├── README.md
├── docs
├── STM32F103C8T8_Bluepill.pptx
└── STM32F103C8T8_Bluepill_PinDiagram.png
├── grbl_stm32.elf.launch
├── src
├── startup_stm32f10x_md.c
├── stm32f10x_conf.h
└── system_stm32f10x.c
└── stm32_flash.ld
/.gitignore:
--------------------------------------------------------------------------------
1 | /Debug/
2 | /Release/
3 |
--------------------------------------------------------------------------------
/.project:
--------------------------------------------------------------------------------
1 |
2 |
3 | grbl_stm32
4 |
5 |
6 |
7 |
8 |
9 | org.eclipse.cdt.managedbuilder.core.genmakebuilder
10 | clean,full,incremental,
11 |
12 |
13 |
14 |
15 | org.eclipse.cdt.managedbuilder.core.ScannerConfigBuilder
16 | full,incremental,
17 |
18 |
19 |
20 |
21 |
22 | org.eclipse.cdt.core.cnature
23 | org.eclipse.cdt.core.ccnature
24 | org.eclipse.cdt.managedbuilder.core.managedBuildNature
25 | org.eclipse.cdt.managedbuilder.core.ScannerConfigNature
26 |
27 |
28 |
--------------------------------------------------------------------------------
/.settings/com.atollic.truestudio.debug.hardware_device.prefs:
--------------------------------------------------------------------------------
1 | BOARD=None
2 | CODE_LOCATION=FLASH
3 | ENDIAN=Little-endian
4 | MCU=STM32F103C8
5 | MCU_VENDOR=STMicroelectronics
6 | MODEL=Pro
7 | PROBE=ST-LINK
8 | PROJECT_FORMAT_VERSION=2
9 | TARGET=STM32
10 | VERSION=9.0.0
11 | eclipse.preferences.version=1
12 |
--------------------------------------------------------------------------------
/.settings/language.settings.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
--------------------------------------------------------------------------------
/.settings/org.eclipse.cdt.managedbuilder.core.prefs:
--------------------------------------------------------------------------------
1 | eclipse.preferences.version=1
2 | environment/buildEnvironmentInclude/com.atollic.truestudio.configuration.release.321943791/CPATH/delimiter=;
3 | environment/buildEnvironmentInclude/com.atollic.truestudio.configuration.release.321943791/CPATH/operation=remove
4 | environment/buildEnvironmentInclude/com.atollic.truestudio.configuration.release.321943791/C_INCLUDE_PATH/delimiter=;
5 | environment/buildEnvironmentInclude/com.atollic.truestudio.configuration.release.321943791/C_INCLUDE_PATH/operation=remove
6 | environment/buildEnvironmentInclude/com.atollic.truestudio.configuration.release.321943791/append=true
7 | environment/buildEnvironmentInclude/com.atollic.truestudio.configuration.release.321943791/appendContributed=true
8 | environment/buildEnvironmentInclude/com.atollic.truestudio.exe.debug.440560047/CPATH/delimiter=;
9 | environment/buildEnvironmentInclude/com.atollic.truestudio.exe.debug.440560047/CPATH/operation=remove
10 | environment/buildEnvironmentInclude/com.atollic.truestudio.exe.debug.440560047/C_INCLUDE_PATH/delimiter=;
11 | environment/buildEnvironmentInclude/com.atollic.truestudio.exe.debug.440560047/C_INCLUDE_PATH/operation=remove
12 | environment/buildEnvironmentInclude/com.atollic.truestudio.exe.debug.440560047/append=true
13 | environment/buildEnvironmentInclude/com.atollic.truestudio.exe.debug.440560047/appendContributed=true
14 | environment/buildEnvironmentLibrary/com.atollic.truestudio.configuration.release.321943791/LIBRARY_PATH/delimiter=;
15 | environment/buildEnvironmentLibrary/com.atollic.truestudio.configuration.release.321943791/LIBRARY_PATH/operation=remove
16 | environment/buildEnvironmentLibrary/com.atollic.truestudio.configuration.release.321943791/append=true
17 | environment/buildEnvironmentLibrary/com.atollic.truestudio.configuration.release.321943791/appendContributed=true
18 | environment/buildEnvironmentLibrary/com.atollic.truestudio.exe.debug.440560047/LIBRARY_PATH/delimiter=;
19 | environment/buildEnvironmentLibrary/com.atollic.truestudio.exe.debug.440560047/LIBRARY_PATH/operation=remove
20 | environment/buildEnvironmentLibrary/com.atollic.truestudio.exe.debug.440560047/append=true
21 | environment/buildEnvironmentLibrary/com.atollic.truestudio.exe.debug.440560047/appendContributed=true
22 |
--------------------------------------------------------------------------------
/Libraries/CMSIS/CMSIS END USER LICENCE AGREEMENT.pdf:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/Libraries/CMSIS/CMSIS END USER LICENCE AGREEMENT.pdf
--------------------------------------------------------------------------------
/Libraries/CMSIS/Device/ST/STM32F10x/Include/stm32f10x.h:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/Libraries/CMSIS/Device/ST/STM32F10x/Include/stm32f10x.h
--------------------------------------------------------------------------------
/Libraries/CMSIS/Device/ST/STM32F10x/Include/system_stm32f10x.h:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file system_stm32f10x.h
4 | * @author MCD Application Team
5 | * @version V3.5.0
6 | * @date 11-March-2011
7 | * @brief CMSIS Cortex-M3 Device Peripheral Access Layer System Header File.
8 | ******************************************************************************
9 | * @attention
10 | *
11 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
12 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
13 | * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
14 | * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
15 | * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
16 | * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
17 | *
18 | * © COPYRIGHT 2011 STMicroelectronics
19 | ******************************************************************************
20 | */
21 |
22 | /** @addtogroup CMSIS
23 | * @{
24 | */
25 |
26 | /** @addtogroup stm32f10x_system
27 | * @{
28 | */
29 |
30 | /**
31 | * @brief Define to prevent recursive inclusion
32 | */
33 | #ifndef __SYSTEM_STM32F10X_H
34 | #define __SYSTEM_STM32F10X_H
35 |
36 | #ifdef __cplusplus
37 | extern "C" {
38 | #endif
39 |
40 | /** @addtogroup STM32F10x_System_Includes
41 | * @{
42 | */
43 |
44 | /**
45 | * @}
46 | */
47 |
48 |
49 | /** @addtogroup STM32F10x_System_Exported_types
50 | * @{
51 | */
52 |
53 | extern uint32_t SystemCoreClock; /*!< System Clock Frequency (Core Clock) */
54 |
55 | /**
56 | * @}
57 | */
58 |
59 | /** @addtogroup STM32F10x_System_Exported_Constants
60 | * @{
61 | */
62 |
63 | /**
64 | * @}
65 | */
66 |
67 | /** @addtogroup STM32F10x_System_Exported_Macros
68 | * @{
69 | */
70 |
71 | /**
72 | * @}
73 | */
74 |
75 | /** @addtogroup STM32F10x_System_Exported_Functions
76 | * @{
77 | */
78 |
79 | extern void SystemInit(void);
80 | extern void SystemCoreClockUpdate(void);
81 | /**
82 | * @}
83 | */
84 |
85 | #ifdef __cplusplus
86 | }
87 | #endif
88 |
89 | #endif /*__SYSTEM_STM32F10X_H */
90 |
91 | /**
92 | * @}
93 | */
94 |
95 | /**
96 | * @}
97 | */
98 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
99 |
--------------------------------------------------------------------------------
/Libraries/CMSIS/Include/arm_common_tables.h:
--------------------------------------------------------------------------------
1 | /* ----------------------------------------------------------------------
2 | * Copyright (C) 2010 ARM Limited. All rights reserved.
3 | *
4 | * $Date: 11. November 2010
5 | * $Revision: V1.0.2
6 | *
7 | * Project: CMSIS DSP Library
8 | * Title: arm_common_tables.h
9 | *
10 | * Description: This file has extern declaration for common tables like Bitreverse, reciprocal etc which are used across different functions
11 | *
12 | * Target Processor: Cortex-M4/Cortex-M3
13 | *
14 | * Version 1.0.2 2010/11/11
15 | * Documentation updated.
16 | *
17 | * Version 1.0.1 2010/10/05
18 | * Production release and review comments incorporated.
19 | *
20 | * Version 1.0.0 2010/09/20
21 | * Production release and review comments incorporated.
22 | * -------------------------------------------------------------------- */
23 |
24 | #ifndef _ARM_COMMON_TABLES_H
25 | #define _ARM_COMMON_TABLES_H
26 |
27 | #include "arm_math.h"
28 |
29 | extern uint16_t armBitRevTable[256];
30 | extern q15_t armRecipTableQ15[64];
31 | extern q31_t armRecipTableQ31[64];
32 | extern const q31_t realCoefAQ31[1024];
33 | extern const q31_t realCoefBQ31[1024];
34 |
35 | #endif /* ARM_COMMON_TABLES_H */
36 |
--------------------------------------------------------------------------------
/Libraries/CMSIS/README.txt:
--------------------------------------------------------------------------------
1 | * -------------------------------------------------------------------
2 | * Copyright (C) 2011 ARM Limited. All rights reserved.
3 | *
4 | * Date: 25 July 2011
5 | * Revision: V2.10
6 | *
7 | * Project: Cortex Microcontroller Software Interface Standard (CMSIS)
8 | * Title: Release Note for CMSIS
9 | *
10 | * -------------------------------------------------------------------
11 |
12 |
13 | NOTE - Open the index.html file to access CMSIS documentation
14 |
15 |
16 | The Cortex Microcontroller Software Interface Standard (CMSIS) provides a single standard across all
17 | Cortex-Mx processor series vendors. It enables code re-use and code sharing across software projects
18 | and reduces time-to-market for new embedded applications.
19 |
20 | CMSIS is released under the terms of the end user license agreement ("CMSIS END USER LICENCE AGREEMENT.pdf").
21 | Any user of the software package is bound to the terms and conditions of the end user license agreement.
22 |
23 |
24 | You will find the following sub-directories:
25 |
26 | Documentation - Contains CMSIS documentation.
27 |
28 | DSP_Lib - MDK project files, Examples and source files etc.. to build the
29 | CMSIS DSP Software Library for Cortex-M0, Cortex-M3, Cortex-M4 processors.
30 |
31 | Include - CMSIS Core Support and CMSIS DSP Include Files.
32 |
33 | Lib - CMSIS DSP Binaries
34 | ---
--------------------------------------------------------------------------------
/Libraries/CMSIS/index.htm:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/Libraries/CMSIS/index.htm
--------------------------------------------------------------------------------
/Libraries/grbl/coolant_control.c:
--------------------------------------------------------------------------------
1 | /*
2 | coolant_control.c - coolant control methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2012-2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #include "grbl.h"
22 |
23 |
24 | void coolant_init()
25 | {
26 | #ifdef AVRTARGET
27 | COOLANT_FLOOD_DDR |= (1 << COOLANT_FLOOD_BIT); // Configure as output pin
28 | #ifdef ENABLE_M7
29 | COOLANT_MIST_DDR |= (1 << COOLANT_MIST_BIT);
30 | #endif
31 | #endif
32 | #ifdef STM32F103C8
33 | GPIO_InitTypeDef GPIO_InitStructure;
34 | RCC_APB2PeriphClockCmd(RCC_COOLANT_FLOOD_PORT, ENABLE);
35 | GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
36 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
37 | GPIO_InitStructure.GPIO_Pin = 1 << COOLANT_FLOOD_BIT;
38 | GPIO_Init(COOLANT_FLOOD_PORT, &GPIO_InitStructure);
39 |
40 | RCC_APB2PeriphClockCmd(RCC_COOLANT_MIST_PORT, ENABLE);
41 | GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
42 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
43 | GPIO_InitStructure.GPIO_Pin = 1 << COOLANT_MIST_BIT;
44 | GPIO_Init(COOLANT_MIST_PORT, &GPIO_InitStructure);
45 | #endif
46 | coolant_stop();
47 | }
48 |
49 |
50 | // Returns current coolant output state. Overrides may alter it from programmed state.
51 | uint8_t coolant_get_state()
52 | {
53 | uint8_t cl_state = COOLANT_STATE_DISABLE;
54 | #if defined(AVRTARGET) || defined(STM32F103C8)
55 | #ifdef INVERT_COOLANT_FLOOD_PIN
56 | if (bit_isfalse(
57 | #ifdef AVRTARGET
58 | COOLANT_FLOOD_PORT
59 | #else
60 | GPIO_ReadOutputData(COOLANT_FLOOD_PORT)
61 | #endif
62 | ,(1 << COOLANT_FLOOD_BIT))) {
63 | #else
64 | if (bit_istrue(
65 | #ifdef AVRTARGET
66 | COOLANT_FLOOD_PORT
67 | #else
68 | GPIO_ReadOutputData(COOLANT_FLOOD_PORT)
69 | #endif
70 | ,(1 << COOLANT_FLOOD_BIT))) {
71 | #endif
72 | cl_state |= COOLANT_STATE_FLOOD;
73 | }
74 | #ifdef ENABLE_M7
75 | #ifdef INVERT_COOLANT_MIST_PIN
76 | if (bit_isfalse(
77 | #ifdef AVRTARGET
78 | COOLANT_MIST_PORT
79 | #else
80 | GPIO_ReadOutputData(COOLANT_MIST_PORT)
81 | #endif
82 | ,(1 << COOLANT_MIST_BIT))) {
83 | #else
84 | if (bit_istrue(
85 | #ifdef AVRTARGET
86 | COOLANT_MIST_PORT
87 | #else
88 | GPIO_ReadOutputData(COOLANT_MIST_PORT)
89 | #endif
90 | ,(1 << COOLANT_MIST_BIT))) {
91 | #endif
92 | cl_state |= COOLANT_STATE_MIST;
93 | }
94 | #endif
95 | #endif
96 | return(cl_state);
97 | }
98 |
99 |
100 | // Directly called by coolant_init(), coolant_set_state(), and mc_reset(), which can be at
101 | // an interrupt-level. No report flag set, but only called by routines that don't need it.
102 | void coolant_stop()
103 | {
104 | #if defined(AVRTARGET) || defined(STM32F103C8)
105 | #ifdef INVERT_COOLANT_FLOOD_PIN
106 | #ifdef AVRTARGET
107 | COOLANT_FLOOD_PORT |= (1 << COOLANT_FLOOD_BIT);
108 | #else
109 | GPIO_SetBits(COOLANT_FLOOD_PORT,1 << COOLANT_FLOOD_BIT);
110 | #endif
111 | #else
112 | #ifdef AVRTARGET
113 | COOLANT_FLOOD_PORT &= ~(1 << COOLANT_FLOOD_BIT);
114 | #else
115 | GPIO_ResetBits(COOLANT_FLOOD_PORT,1 << COOLANT_FLOOD_BIT);
116 | #endif
117 | #endif
118 | #ifdef ENABLE_M7
119 | #ifdef INVERT_COOLANT_MIST_PIN
120 | #ifdef AVRTARGET
121 | COOLANT_MIST_PORT |= (1 << COOLANT_MIST_BIT);
122 | #else
123 | GPIO_SetBits(COOLANT_MIST_PORT, 1 << COOLANT_MIST_BIT);
124 | #endif
125 | #else
126 | #ifdef AVRTARGET
127 | COOLANT_MIST_PORT &= ~(1 << COOLANT_MIST_BIT);
128 | #else
129 | GPIO_ResetBits(COOLANT_MIST_PORT, 1 << COOLANT_MIST_BIT);
130 | #endif
131 | #endif
132 | #endif
133 | #endif
134 | }
135 |
136 |
137 | // Main program only. Immediately sets flood coolant running state and also mist coolant,
138 | // if enabled. Also sets a flag to report an update to a coolant state.
139 | // Called by coolant toggle override, parking restore, parking retract, sleep mode, g-code
140 | // parser program end, and g-code parser coolant_sync().
141 | void coolant_set_state(uint8_t mode)
142 | {
143 | if (sys.abort) { return; } // Block during abort.
144 |
145 | if (mode == COOLANT_DISABLE) {
146 |
147 | coolant_stop();
148 |
149 | } else {
150 |
151 | #if defined(AVRTARGET) || defined(STM32F103C8)
152 | if (mode & COOLANT_FLOOD_ENABLE) {
153 | #ifdef INVERT_COOLANT_FLOOD_PIN
154 | #ifdef AVRTARGET
155 | COOLANT_FLOOD_PORT &= ~(1 << COOLANT_FLOOD_BIT);
156 | #else
157 | GPIO_ResetBits(COOLANT_FLOOD_PORT,1 << COOLANT_FLOOD_BIT);
158 | #endif
159 | #else
160 | #ifdef AVRTARGET
161 | COOLANT_FLOOD_PORT |= (1 << COOLANT_FLOOD_BIT);
162 | #else
163 | GPIO_SetBits(COOLANT_FLOOD_PORT,1 << COOLANT_FLOOD_BIT);
164 | #endif
165 | #endif
166 | }
167 |
168 | #ifdef ENABLE_M7
169 | if (mode & COOLANT_MIST_ENABLE) {
170 | #ifdef INVERT_COOLANT_MIST_PIN
171 | #ifdef AVRTARGET
172 | COOLANT_MIST_PORT &= ~(1 << COOLANT_MIST_BIT);
173 | #else
174 | GPIO_ResetBits(COOLANT_MIST_PORT, 1 << COOLANT_MIST_BIT);
175 | #endif
176 | #else
177 | #ifdef AVRTARGET
178 | COOLANT_MIST_PORT |= (1 << COOLANT_MIST_BIT);
179 | #else
180 | GPIO_SetBits(COOLANT_MIST_PORT, 1 << COOLANT_MIST_BIT);
181 | #endif
182 | #endif
183 | }
184 | #endif
185 | #endif
186 | }
187 | sys.report_ovr_counter = 0; // Set to report change immediately
188 | }
189 |
190 |
191 | // G-code parser entry-point for setting coolant state. Forces a planner buffer sync and bails
192 | // if an abort or check-mode is active.
193 | void coolant_sync(uint8_t mode)
194 | {
195 | if (sys.state == STATE_CHECK_MODE) { return; }
196 | protocol_buffer_synchronize(); // Ensure coolant turns on when specified in program.
197 | coolant_set_state(mode);
198 | }
199 |
--------------------------------------------------------------------------------
/Libraries/grbl/coolant_control.h:
--------------------------------------------------------------------------------
1 | /*
2 | coolant_control.h - spindle control methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2012-2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #ifndef coolant_control_h
22 | #define coolant_control_h
23 |
24 | #define COOLANT_NO_SYNC false
25 | #define COOLANT_FORCE_SYNC true
26 |
27 | #define COOLANT_STATE_DISABLE 0 // Must be zero
28 | #define COOLANT_STATE_FLOOD bit(0)
29 | #define COOLANT_STATE_MIST bit(1)
30 |
31 |
32 | // Initializes coolant control pins.
33 | void coolant_init();
34 |
35 | // Returns current coolant output state. Overrides may alter it from programmed state.
36 | uint8_t coolant_get_state();
37 |
38 | // Immediately disables coolant pins.
39 | void coolant_stop();
40 |
41 | // Sets the coolant pins according to state specified.
42 | void coolant_set_state(uint8_t mode);
43 |
44 | // G-code parser entry-point for setting coolant states. Checks for and executes additional conditions.
45 | void coolant_sync(uint8_t mode);
46 |
47 | #endif
48 |
--------------------------------------------------------------------------------
/Libraries/grbl/eeprom.h:
--------------------------------------------------------------------------------
1 | /*
2 | eeprom.h - EEPROM methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2009-2011 Simen Svale Skogsrud
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #ifndef eeprom_h
22 | #define eeprom_h
23 | #if defined(WIN32) || defined (STM32F103C8)
24 | void eeprom_init();
25 | #endif
26 | unsigned char eeprom_get_char(unsigned int addr);
27 | void eeprom_put_char(unsigned int addr, unsigned char new_value);
28 | void memcpy_to_eeprom_with_checksum(unsigned int destination, char *source, unsigned int size);
29 | int memcpy_from_eeprom_with_checksum(char *destination, unsigned int source, unsigned int size);
30 |
31 | #endif
32 |
--------------------------------------------------------------------------------
/Libraries/grbl/examples/grblUpload/grblUpload.ino:
--------------------------------------------------------------------------------
1 | /***********************************************************************
2 | This sketch compiles and uploads Grbl to your 328p-based Arduino!
3 |
4 | To use:
5 | - First make sure you have imported Grbl source code into your Arduino
6 | IDE. There are details on our Github website on how to do this.
7 |
8 | - Select your Arduino Board and Serial Port in the Tools drop-down menu.
9 | NOTE: Grbl only officially supports 328p-based Arduinos, like the Uno.
10 | Using other boards will likely not work!
11 |
12 | - Then just click 'Upload'. That's it!
13 |
14 | For advanced users:
15 | If you'd like to see what else Grbl can do, there are some additional
16 | options for customization and features you can enable or disable.
17 | Navigate your file system to where the Arduino IDE has stored the Grbl
18 | source code files, open the 'config.h' file in your favorite text
19 | editor. Inside are dozens of feature descriptions and #defines. Simply
20 | comment or uncomment the #defines or alter their assigned values, save
21 | your changes, and then click 'Upload' here.
22 |
23 | Copyright (c) 2015 Sungeun K. Jeon
24 | Released under the MIT-license. See license.txt for details.
25 | ***********************************************************************/
26 |
27 | #include
28 |
29 | // Do not alter this file!
30 |
--------------------------------------------------------------------------------
/Libraries/grbl/examples/grblUpload/license.txt:
--------------------------------------------------------------------------------
1 | The MIT License (MIT)
2 |
3 | Copyright (c) 2015 Sungeun K. Jeon
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in
13 | all copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
21 | THE SOFTWARE.
--------------------------------------------------------------------------------
/Libraries/grbl/examples/grblWrite_BuildInfo/grblWrite_BuildInfo.ino:
--------------------------------------------------------------------------------
1 | /***********************************************************************
2 | This sketch writes a `$I` build info string directly into Arduino EEPROM
3 |
4 | To use:
5 | - Just alter the "build_info_line" string to whatever you'd like. Then
6 | compile and upload this sketch to your Arduino.
7 |
8 | - If your Arduino is blinking slowly, your string has already been
9 | written to your EEPROM and been verified by checksums! That's it!
10 |
11 | - If you Arduino LED is blinking fast, something went wrong and the
12 | checksums don't match. You can optionally connect to the Arduino via
13 | the serial monitor, and the sketch will show what its doing.
14 |
15 | NOTE: This sketch is provided as a tool template for OEMs who may need
16 | to restrict users from altering their build info, so they can place
17 | important product information here when enabling the restriction.
18 |
19 | NOTE: When uploading Grbl to the Arduino with this sketch on it, make
20 | sure you see the slow blink before you start the upload process. This
21 | ensures you aren't flashing Grbl when it's in mid-write of the EEPROM.
22 |
23 | Copyright (c) 2016 Sungeun K. Jeon for Gnea Research LLC
24 | Released under the MIT-license. See license.txt for details.
25 | ***********************************************************************/
26 |
27 | #include
28 | #include
29 |
30 | #define SERIAL_BAUD_RATE 115200
31 | #define LINE_LENGTH 80U // Grbl line length
32 | #define BYTE_LOCATION 942U // Grbl build info EEPROM address.
33 |
34 |
35 | // ----- CHANGE THIS LINE -----
36 |
37 | char build_info_line[LINE_LENGTH] = "Testing123.";
38 |
39 | // -----------------------------
40 |
41 |
42 | uint8_t status = false;
43 | int ledPin = 13; // LED connected to digital pin 13
44 |
45 | void setup() {
46 | Serial.begin(SERIAL_BAUD_RATE);
47 | delay(500);
48 |
49 | uint32_t address = BYTE_LOCATION;
50 | uint32_t size = LINE_LENGTH;
51 | char *write_pointer = (char*)build_info_line;
52 | uint8_t write_checksum = 0;
53 | for (; size>0; size--) {
54 | write_checksum = (write_checksum << 1) || (write_checksum >> 7);
55 | write_checksum += *write_pointer;
56 | EEPROM.put(address++, *(write_pointer++));
57 | }
58 | EEPROM.put(address,write_checksum);
59 |
60 | Serial.print(F("-> Writing line to EEPROM: '"));
61 | Serial.print(build_info_line);
62 | Serial.print(F("'\n\r-> Write checksum: "));
63 | Serial.println(write_checksum,DEC);
64 |
65 | size = LINE_LENGTH;
66 | address = BYTE_LOCATION;
67 | uint8_t data = 0;
68 | char read_line[LINE_LENGTH];
69 | char *read_pointer = (char*)read_line;
70 | uint8_t read_checksum = 0;
71 | uint8_t stored_checksum = 0;
72 | for(; size > 0; size--) {
73 | data = EEPROM.read(address++);
74 | read_checksum = (read_checksum << 1) || (read_checksum >> 7);
75 | read_checksum += data;
76 | *(read_pointer++) = data;
77 | }
78 | stored_checksum = EEPROM.read(address);
79 |
80 | Serial.print(F("<- Reading line from EEPROM: '"));
81 | Serial.print(read_line);
82 | Serial.print("'\n\r<- Read checksum: ");
83 | Serial.println(read_checksum,DEC);
84 |
85 | if ((read_checksum == write_checksum) && (read_checksum == stored_checksum)) {
86 | status = true;
87 | Serial.print(F("SUCCESS! All checksums match!\r\n"));
88 | } else {
89 | if (write_checksum != stored_checksum) {
90 | Serial.println(F("ERROR! Write and stored EEPROM checksums don't match!"));
91 | } else {
92 | Serial.println(F("ERROR! Read and stored checksums don't match!"));
93 | }
94 | }
95 | pinMode(ledPin, OUTPUT); // sets the digital pin as output
96 | }
97 |
98 | void loop() {
99 | // Blink to let user know EEPROM write status.
100 | // Slow blink is 'ok'. Fast blink is an 'error'.
101 | digitalWrite(ledPin, HIGH); // sets the LED on
102 | if (status) { delay(1500); } // Slow blink
103 | else { delay(100); } // Rapid blink
104 | digitalWrite(ledPin, LOW); // sets the LED off
105 | if (status) { delay(1500); }
106 | else { delay(100); }
107 | }
108 |
109 |
110 |
--------------------------------------------------------------------------------
/Libraries/grbl/examples/grblWrite_BuildInfo/license.txt:
--------------------------------------------------------------------------------
1 | The MIT License (MIT)
2 |
3 | Copyright (c) 2016 Sungeun K. Jeon for Gnea Research LLC
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in
13 | all copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
21 | THE SOFTWARE.
--------------------------------------------------------------------------------
/Libraries/grbl/grbl.h:
--------------------------------------------------------------------------------
1 | /*
2 | grbl.h - main Grbl include file
3 | Part of Grbl
4 |
5 | Copyright (c) 2015-2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #ifndef grbl_h
22 | #define grbl_h
23 |
24 | // Grbl versioning system
25 | #define GRBL_VERSION "1.1f"
26 | #define GRBL_VERSION_BUILD "20170801"
27 |
28 | #if !defined(STM32F103C8) && !defined(WIN32)
29 | #define AVRTARGET
30 | #endif
31 |
32 | // Define standard libraries used by Grbl.
33 | #ifdef AVRTARGET
34 | #include
35 | #include
36 | #include
37 | #include
38 | #include
39 | #include
40 | #include
41 | #define PORTPINDEF uint8_t
42 | #endif
43 | #include
44 | #ifdef WIN32
45 | #include
46 | typedef signed char int8_t;
47 | typedef signed short int16_t;
48 | typedef signed int int32_t;
49 | typedef unsigned char uint8_t;
50 | typedef unsigned short uint16_t;
51 | typedef unsigned int uint32_t;
52 | typedef signed long long int64_t;
53 | typedef unsigned long long uint64_t;
54 | typedef int bool;
55 | #define false 0
56 | #define true 1
57 | #define truncf(x) (int32_t)x
58 | #define PSTR(x) x
59 | #define pgm_read_byte_near(x) *(x)
60 | #define _delay_ms(x) Sleep(x)
61 | #define M_PI 3.1415926f
62 | #define LOG(x,y)
63 | #define PORTPINDEF uint8_t
64 | #define printPgmString printString
65 | //#define NOEEPROMSUPPORT
66 | #endif
67 | #ifdef STM32F103C8
68 | #include "stm32f10x.h"
69 | #include "stm32f10x_gpio.h"
70 | #include "stm32f10x_exti.h"
71 | #include "stm32f10x_tim.h"
72 | #include "misc.h"
73 | #define PSTR(x) x
74 | #define pgm_read_byte_near(x) *(x)
75 | void _delay_ms(uint32_t x);
76 | void _delay_us(uint32_t x);
77 | #define false 0
78 | #define true 1
79 | #define PORTPINDEF uint16_t
80 | typedef int bool;
81 | //#define NOEEPROMSUPPORT
82 | #define printPgmString printString
83 | #endif
84 | #include
85 | #include
86 | #include
87 |
88 | // Define the Grbl system include files. NOTE: Do not alter organization.
89 | #include "config.h"
90 | #include "nuts_bolts.h"
91 | #include "settings.h"
92 | #include "system.h"
93 | #include "defaults.h"
94 | #include "cpu_map.h"
95 | #include "planner.h"
96 | #include "coolant_control.h"
97 | #include "eeprom.h"
98 | #include "gcode.h"
99 | #include "limits.h"
100 | #include "motion_control.h"
101 | #include "planner.h"
102 | #include "print.h"
103 | #include "probe.h"
104 | #include "protocol.h"
105 | #include "report.h"
106 | #include "serial.h"
107 | #include "spindle_control.h"
108 | #include "stepper.h"
109 | #include "jog.h"
110 |
111 | // ---------------------------------------------------------------------------------------
112 | // COMPILE-TIME ERROR CHECKING OF DEFINE VALUES:
113 |
114 | #ifndef HOMING_CYCLE_0
115 | #error "Required HOMING_CYCLE_0 not defined."
116 | #endif
117 |
118 | #if defined(USE_SPINDLE_DIR_AS_ENABLE_PIN) && !defined(VARIABLE_SPINDLE)
119 | #error "USE_SPINDLE_DIR_AS_ENABLE_PIN may only be used with VARIABLE_SPINDLE enabled"
120 | #endif
121 |
122 | #if defined(USE_SPINDLE_DIR_AS_ENABLE_PIN) && !defined(CPU_MAP_ATMEGA328P)
123 | #error "USE_SPINDLE_DIR_AS_ENABLE_PIN may only be used with a 328p processor"
124 | #endif
125 |
126 | #if !defined(USE_SPINDLE_DIR_AS_ENABLE_PIN) && defined(SPINDLE_ENABLE_OFF_WITH_ZERO_SPEED)
127 | #error "SPINDLE_ENABLE_OFF_WITH_ZERO_SPEED may only be used with USE_SPINDLE_DIR_AS_ENABLE_PIN enabled"
128 | #endif
129 |
130 | #if defined(PARKING_ENABLE)
131 | #if defined(HOMING_FORCE_SET_ORIGIN)
132 | #error "HOMING_FORCE_SET_ORIGIN is not supported with PARKING_ENABLE at this time."
133 | #endif
134 | #endif
135 |
136 | #if defined(ENABLE_PARKING_OVERRIDE_CONTROL)
137 | #if !defined(PARKING_ENABLE)
138 | #error "ENABLE_PARKING_OVERRIDE_CONTROL must be enabled with PARKING_ENABLE."
139 | #endif
140 | #endif
141 |
142 | #if defined(SPINDLE_PWM_MIN_VALUE)
143 | #if !(SPINDLE_PWM_MIN_VALUE > 0)
144 | #error "SPINDLE_PWM_MIN_VALUE must be greater than zero."
145 | #endif
146 | #endif
147 |
148 | #if (REPORT_WCO_REFRESH_BUSY_COUNT < REPORT_WCO_REFRESH_IDLE_COUNT)
149 | #error "WCO busy refresh is less than idle refresh."
150 | #endif
151 | #if (REPORT_OVR_REFRESH_BUSY_COUNT < REPORT_OVR_REFRESH_IDLE_COUNT)
152 | #error "Override busy refresh is less than idle refresh."
153 | #endif
154 | #if (REPORT_WCO_REFRESH_IDLE_COUNT < 2)
155 | #error "WCO refresh must be greater than one."
156 | #endif
157 | #if (REPORT_OVR_REFRESH_IDLE_COUNT < 1)
158 | #error "Override refresh must be greater than zero."
159 | #endif
160 | // ---------------------------------------------------------------------------------------
161 |
162 | #endif
163 |
--------------------------------------------------------------------------------
/Libraries/grbl/jog.c:
--------------------------------------------------------------------------------
1 | /*
2 | jog.h - Jogging methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #include "grbl.h"
22 |
23 |
24 | // Sets up valid jog motion received from g-code parser, checks for soft-limits, and executes the jog.
25 | uint8_t jog_execute(plan_line_data_t *pl_data, parser_block_t *gc_block)
26 | {
27 | // Initialize planner data struct for jogging motions.
28 | // NOTE: Spindle and coolant are allowed to fully function with overrides during a jog.
29 | pl_data->feed_rate = gc_block->values.f;
30 | pl_data->condition |= PL_COND_FLAG_NO_FEED_OVERRIDE;
31 | #ifdef USE_LINE_NUMBERS
32 | pl_data->line_number = gc_block->values.n;
33 | #endif
34 |
35 | if (bit_istrue(settings.flags, BITFLAG_SOFT_LIMIT_ENABLE)) {
36 | if (system_check_travel_limits(gc_block->values.xyz)) { return(STATUS_TRAVEL_EXCEEDED); }
37 | }
38 |
39 | // Valid jog command. Plan, set state, and execute.
40 | mc_line(gc_block->values.xyz, pl_data);
41 | if (sys.state == STATE_IDLE) {
42 | if (plan_get_current_block() != NULL) { // Check if there is a block to execute.
43 | sys.state = STATE_JOG;
44 | st_prep_buffer();
45 | st_wake_up(); // NOTE: Manual start. No state machine required.
46 | }
47 | }
48 |
49 | return(STATUS_OK);
50 | }
51 |
--------------------------------------------------------------------------------
/Libraries/grbl/jog.h:
--------------------------------------------------------------------------------
1 | /*
2 | jog.h - Jogging methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #ifndef jog_h
22 | #define jog_h
23 |
24 | #include "gcode.h"
25 |
26 | // System motion line numbers must be zero.
27 | #define JOG_LINE_NUMBER 0
28 |
29 | // Sets up valid jog motion received from g-code parser, checks for soft-limits, and executes the jog.
30 | uint8_t jog_execute(plan_line_data_t *pl_data, parser_block_t *gc_block);
31 |
32 | #endif
33 |
--------------------------------------------------------------------------------
/Libraries/grbl/limits.h:
--------------------------------------------------------------------------------
1 | /*
2 | limits.h - code pertaining to limit-switches and performing the homing cycle
3 | Part of Grbl
4 |
5 | Copyright (c) 2012-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef limits_h
23 | #define limits_h
24 |
25 |
26 | // Initialize the limits module
27 | void limits_init();
28 |
29 | // Disables hard limits.
30 | void limits_disable();
31 |
32 | // Returns limit state as a bit-wise uint8 variable.
33 | uint8_t limits_get_state();
34 |
35 | // Perform one portion of the homing cycle based on the input settings.
36 | void limits_go_home(uint8_t cycle_mask);
37 |
38 | // Check for soft limit violations
39 | void limits_soft_check(float *target);
40 |
41 | #endif
42 |
--------------------------------------------------------------------------------
/Libraries/grbl/motion_control.h:
--------------------------------------------------------------------------------
1 | /*
2 | motion_control.h - high level interface for issuing motion commands
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef motion_control_h
23 | #define motion_control_h
24 |
25 |
26 | // System motion commands must have a line number of zero.
27 | #define HOMING_CYCLE_LINE_NUMBER 0
28 | #define PARKING_MOTION_LINE_NUMBER 0
29 |
30 | #define HOMING_CYCLE_ALL 0 // Must be zero.
31 | #define HOMING_CYCLE_X bit(X_AXIS)
32 | #define HOMING_CYCLE_Y bit(Y_AXIS)
33 | #define HOMING_CYCLE_Z bit(Z_AXIS)
34 |
35 |
36 | // Execute linear motion in absolute millimeter coordinates. Feed rate given in millimeters/second
37 | // unless invert_feed_rate is true. Then the feed_rate means that the motion should be completed in
38 | // (1 minute)/feed_rate time.
39 | void mc_line(float *target, plan_line_data_t *pl_data);
40 |
41 | // Execute an arc in offset mode format. position == current xyz, target == target xyz,
42 | // offset == offset from current xyz, axis_XXX defines circle plane in tool space, axis_linear is
43 | // the direction of helical travel, radius == circle radius, is_clockwise_arc boolean. Used
44 | // for vector transformation direction.
45 | void mc_arc(float *target, plan_line_data_t *pl_data, float *position, float *offset, float radius,
46 | uint8_t axis_0, uint8_t axis_1, uint8_t axis_linear, uint8_t is_clockwise_arc);
47 |
48 | // Dwell for a specific number of seconds
49 | void mc_dwell(float seconds);
50 |
51 | // Perform homing cycle to locate machine zero. Requires limit switches.
52 | void mc_homing_cycle(uint8_t cycle_mask);
53 |
54 | // Perform tool length probe cycle. Requires probe switch.
55 | uint8_t mc_probe_cycle(float *target, plan_line_data_t *pl_data, uint8_t parser_flags);
56 |
57 | // Handles updating the override control state.
58 | void mc_override_ctrl_update(uint8_t override_state);
59 |
60 | // Plans and executes the single special motion case for parking. Independent of main planner buffer.
61 | void mc_parking_motion(float *parking_target, plan_line_data_t *pl_data);
62 |
63 | // Performs system reset. If in motion state, kills all motion and sets system alarm.
64 | void mc_reset();
65 |
66 | #endif
67 |
--------------------------------------------------------------------------------
/Libraries/grbl/nuts_bolts.c:
--------------------------------------------------------------------------------
1 | /*
2 | nuts_bolts.c - Shared functions
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #include "grbl.h"
23 |
24 |
25 | #define MAX_INT_DIGITS 8 // Maximum number of digits in int32 (and float)
26 |
27 |
28 | // Extracts a floating point value from a string. The following code is based loosely on
29 | // the avr-libc strtod() function by Michael Stumpf and Dmitry Xmelkov and many freely
30 | // available conversion method examples, but has been highly optimized for Grbl. For known
31 | // CNC applications, the typical decimal value is expected to be in the range of E0 to E-4.
32 | // Scientific notation is officially not supported by g-code, and the 'E' character may
33 | // be a g-code word on some CNC systems. So, 'E' notation will not be recognized.
34 | // NOTE: Thanks to Radu-Eosif Mihailescu for identifying the issues with using strtod().
35 | uint8_t read_float(char *line, uint8_t *char_counter, float *float_ptr)
36 | {
37 | char *ptr = line + *char_counter;
38 | unsigned char c;
39 |
40 | // Grab first character and increment pointer. No spaces assumed in line.
41 | c = *ptr++;
42 |
43 | // Capture initial positive/minus character
44 | bool isnegative = false;
45 | if (c == '-') {
46 | isnegative = true;
47 | c = *ptr++;
48 | } else if (c == '+') {
49 | c = *ptr++;
50 | }
51 |
52 | // Extract number into fast integer. Track decimal in terms of exponent value.
53 | uint32_t intval = 0;
54 | int8_t exp = 0;
55 | uint8_t ndigit = 0;
56 | bool isdecimal = false;
57 | while(1) {
58 | c -= '0';
59 | if (c <= 9) {
60 | ndigit++;
61 | if (ndigit <= MAX_INT_DIGITS) {
62 | if (isdecimal) { exp--; }
63 | intval = (((intval << 2) + intval) << 1) + c; // intval*10 + c
64 | } else {
65 | if (!(isdecimal)) { exp++; } // Drop overflow digits
66 | }
67 | } else if (c == (('.'-'0') & 0xff) && !(isdecimal)) {
68 | isdecimal = true;
69 | } else {
70 | break;
71 | }
72 | c = *ptr++;
73 | }
74 |
75 | // Return if no digits have been read.
76 | if (!ndigit) { return(false); };
77 |
78 | // Convert integer into floating point.
79 | float fval;
80 | fval = (float)intval;
81 |
82 | // Apply decimal. Should perform no more than two floating point multiplications for the
83 | // expected range of E0 to E-4.
84 | if (fval != 0) {
85 | while (exp <= -2) {
86 | fval *= 0.01f;
87 | exp += 2;
88 | }
89 | if (exp < 0) {
90 | fval *= 0.1f;
91 | } else if (exp > 0) {
92 | do {
93 | fval *= 10.0f;
94 | } while (--exp > 0);
95 | }
96 | }
97 |
98 | // Assign floating point value with correct sign.
99 | if (isnegative) {
100 | *float_ptr = -fval;
101 | } else {
102 | *float_ptr = fval;
103 | }
104 |
105 | *char_counter = ptr - line - 1; // Set char_counter to next statement
106 |
107 | return(true);
108 | }
109 |
110 |
111 | // Non-blocking delay function used for general operation and suspend features.
112 | void delay_sec(float seconds, uint8_t mode)
113 | {
114 | uint16_t i = (uint16_t)ceilf(1000 / DWELL_TIME_STEP*seconds);
115 | while (i-- > 0) {
116 | if (sys.abort) { return; }
117 | if (mode == DELAY_MODE_DWELL) {
118 | protocol_execute_realtime();
119 | } else { // DELAY_MODE_SYS_SUSPEND
120 | // Execute rt_system() only to avoid nesting suspend loops.
121 | protocol_exec_rt_system();
122 | if (sys.suspend & SUSPEND_RESTART_RETRACT) { return; } // Bail, if safety door reopens.
123 | }
124 | _delay_ms(DWELL_TIME_STEP); // Delay DWELL_TIME_STEP increment
125 | }
126 | }
127 |
128 |
129 | // Delays variable defined milliseconds. Compiler compatibility fix for _delay_ms(),
130 | // which only accepts constants in future compiler releases.
131 | void delay_ms(uint16_t ms)
132 | {
133 | while ( ms-- ) { _delay_ms(1); }
134 | }
135 |
136 |
137 | // Simple hypotenuse computation function.
138 | float hypot_f(float x, float y) { return(sqrtf(x*x + y*y)); }
139 |
140 |
141 | float convert_delta_vector_to_unit_vector(float *vector)
142 | {
143 | uint8_t idx;
144 | float magnitude = 0.0f;
145 | for (idx=0; idx.
20 | */
21 |
22 | #ifndef nuts_bolts_h
23 | #define nuts_bolts_h
24 | #ifdef STM32F103C8
25 | #include "stm32f10x_rcc.h"
26 | #endif
27 | #include "float.h"
28 | #define false 0
29 | #define true 1
30 |
31 | #define SOME_LARGE_VALUE FLT_MAX
32 |
33 | // Axis array index values. Must start with 0 and be continuous.
34 | #define N_AXIS 3 // Number of axes
35 | #define X_AXIS 0 // Axis indexing value.
36 | #define Y_AXIS 1
37 | #define Z_AXIS 2
38 | // #define A_AXIS 3
39 |
40 | // CoreXY motor assignments. DO NOT ALTER.
41 | // NOTE: If the A and B motor axis bindings are changed, this effects the CoreXY equations.
42 | #ifdef COREXY
43 | #define A_MOTOR X_AXIS // Must be X_AXIS
44 | #define B_MOTOR Y_AXIS // Must be Y_AXIS
45 | #endif
46 |
47 | // Conversions
48 | #define MM_PER_INCH (25.40f)
49 | #define INCH_PER_MM (0.0393701f)
50 | #define TICKS_PER_MICROSECOND (F_CPU/1000000)
51 | #ifdef WIN32
52 | extern LARGE_INTEGER Win32Frequency;
53 | #define F_CPU Win32Frequency.QuadPart
54 | #endif
55 | #ifdef STM32F103C8
56 | #define F_CPU SystemCoreClock
57 | #endif
58 | #define DELAY_MODE_DWELL 0
59 | #define DELAY_MODE_SYS_SUSPEND 1
60 |
61 | // Useful macros
62 | #define clear_vector(a) memset(a, 0, sizeof(a))
63 | #define clear_vector_float(a) memset(a, 0.0, sizeof(float)*N_AXIS)
64 | // #define clear_vector_long(a) memset(a, 0.0, sizeof(long)*N_AXIS)
65 | #define max(a,b) (((a) > (b)) ? (a) : (b))
66 | #define min(a,b) (((a) < (b)) ? (a) : (b))
67 | #define isequal_position_vector(a,b) !(memcmp(a, b, sizeof(float)*N_AXIS))
68 |
69 | // Bit field and masking macros
70 | #define bit(n) (1 << n)
71 | #define bit_true(x,mask) (x) |= (mask)
72 | #define bit_false(x,mask) (x) &= ~(mask)
73 | #define bit_istrue(x,mask) ((x & mask) != 0)
74 | #define bit_isfalse(x,mask) ((x & mask) == 0)
75 |
76 | // Read a floating point value from a string. Line points to the input buffer, char_counter
77 | // is the indexer pointing to the current character of the line, while float_ptr is
78 | // a pointer to the result variable. Returns true when it succeeds
79 | uint8_t read_float(char *line, uint8_t *char_counter, float *float_ptr);
80 |
81 | // Non-blocking delay function used for general operation and suspend features.
82 | void delay_sec(float seconds, uint8_t mode);
83 |
84 | // Delays variable-defined milliseconds. Compiler compatibility fix for _delay_ms().
85 | void delay_ms(uint16_t ms);
86 |
87 |
88 | // Computes hypotenuse, avoiding avr-gcc's bloated version and the extra error checking.
89 | float hypot_f(float x, float y);
90 |
91 | float convert_delta_vector_to_unit_vector(float *vector);
92 | float limit_value_by_axis_maximum(float *max_value, float *unit_vec);
93 |
94 | #endif
95 |
--------------------------------------------------------------------------------
/Libraries/grbl/planner.h:
--------------------------------------------------------------------------------
1 | /*
2 | planner.h - buffers movement commands and manages the acceleration profile plan
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef planner_h
23 | #define planner_h
24 |
25 |
26 | // The number of linear motions that can be in the plan at any give time
27 | #ifndef BLOCK_BUFFER_SIZE
28 | #ifdef AVRTARGET
29 | #ifdef USE_LINE_NUMBERS
30 | #define BLOCK_BUFFER_SIZE 15
31 | #else
32 | #define BLOCK_BUFFER_SIZE 16
33 | #endif
34 | #else
35 | #define BLOCK_BUFFER_SIZE 36
36 | #endif
37 | #endif
38 |
39 | // Returned status message from planner.
40 | #define PLAN_OK true
41 | #define PLAN_EMPTY_BLOCK false
42 |
43 | // Define planner data condition flags. Used to denote running conditions of a block.
44 | #define PL_COND_FLAG_RAPID_MOTION bit(0)
45 | #define PL_COND_FLAG_SYSTEM_MOTION bit(1) // Single motion. Circumvents planner state. Used by home/park.
46 | #define PL_COND_FLAG_NO_FEED_OVERRIDE bit(2) // Motion does not honor feed override.
47 | #define PL_COND_FLAG_INVERSE_TIME bit(3) // Interprets feed rate value as inverse time when set.
48 | #define PL_COND_FLAG_SPINDLE_CW bit(4)
49 | #define PL_COND_FLAG_SPINDLE_CCW bit(5)
50 | #define PL_COND_FLAG_COOLANT_FLOOD bit(6)
51 | #define PL_COND_FLAG_COOLANT_MIST bit(7)
52 | #define PL_COND_MOTION_MASK (PL_COND_FLAG_RAPID_MOTION|PL_COND_FLAG_SYSTEM_MOTION|PL_COND_FLAG_NO_FEED_OVERRIDE)
53 | #define PL_COND_ACCESSORY_MASK (PL_COND_FLAG_SPINDLE_CW|PL_COND_FLAG_SPINDLE_CCW|PL_COND_FLAG_COOLANT_FLOOD|PL_COND_FLAG_COOLANT_MIST)
54 |
55 |
56 | // This struct stores a linear movement of a g-code block motion with its critical "nominal" values
57 | // are as specified in the source g-code.
58 | typedef struct {
59 | // Fields used by the bresenham algorithm for tracing the line
60 | // NOTE: Used by stepper algorithm to execute the block correctly. Do not alter these values.
61 | uint32_t steps[N_AXIS]; // Step count along each axis
62 | uint32_t step_event_count; // The maximum step axis count and number of steps required to complete this block.
63 | uint8_t direction_bits; // The direction bit set for this block (refers to *_DIRECTION_BIT in config.h)
64 |
65 | // Block condition data to ensure correct execution depending on states and overrides.
66 | uint8_t condition; // Block bitflag variable defining block run conditions. Copied from pl_line_data.
67 | #ifdef USE_LINE_NUMBERS
68 | int32_t line_number; // Block line number for real-time reporting. Copied from pl_line_data.
69 | #endif
70 |
71 | // Fields used by the motion planner to manage acceleration. Some of these values may be updated
72 | // by the stepper module during execution of special motion cases for replanning purposes.
73 | float entry_speed_sqr; // The current planned entry speed at block junction in (mm/min)^2
74 | float max_entry_speed_sqr; // Maximum allowable entry speed based on the minimum of junction limit and
75 | // neighboring nominal speeds with overrides in (mm/min)^2
76 | float acceleration; // Axis-limit adjusted line acceleration in (mm/min^2). Does not change.
77 | float millimeters; // The remaining distance for this block to be executed in (mm).
78 | // NOTE: This value may be altered by stepper algorithm during execution.
79 |
80 | // Stored rate limiting data used by planner when changes occur.
81 | float max_junction_speed_sqr; // Junction entry speed limit based on direction vectors in (mm/min)^2
82 | float rapid_rate; // Axis-limit adjusted maximum rate for this block direction in (mm/min)
83 | float programmed_rate; // Programmed rate of this block (mm/min).
84 |
85 | #ifdef VARIABLE_SPINDLE
86 | // Stored spindle speed data used by spindle overrides and resuming methods.
87 | float spindle_speed; // Block spindle speed. Copied from pl_line_data.
88 | #endif
89 | } plan_block_t;
90 |
91 |
92 | // Planner data prototype. Must be used when passing new motions to the planner.
93 | typedef struct {
94 | float feed_rate; // Desired feed rate for line motion. Value is ignored, if rapid motion.
95 | float spindle_speed; // Desired spindle speed through line motion.
96 | uint8_t condition; // Bitflag variable to indicate planner conditions. See defines above.
97 | #ifdef USE_LINE_NUMBERS
98 | int32_t line_number; // Desired line number to report when executing.
99 | #endif
100 | } plan_line_data_t;
101 |
102 |
103 | // Initialize and reset the motion plan subsystem
104 | void plan_reset(); // Reset all
105 | void plan_reset_buffer(); // Reset buffer only.
106 |
107 | // Add a new linear movement to the buffer. target[N_AXIS] is the signed, absolute target position
108 | // in millimeters. Feed rate specifies the speed of the motion. If feed rate is inverted, the feed
109 | // rate is taken to mean "frequency" and would complete the operation in 1/feed_rate minutes.
110 | uint8_t plan_buffer_line(float *target, plan_line_data_t *pl_data);
111 |
112 | // Called when the current block is no longer needed. Discards the block and makes the memory
113 | // availible for new blocks.
114 | void plan_discard_current_block();
115 |
116 | // Gets the planner block for the special system motion cases. (Parking/Homing)
117 | plan_block_t *plan_get_system_motion_block();
118 |
119 | // Gets the current block. Returns NULL if buffer empty
120 | plan_block_t *plan_get_current_block();
121 |
122 | // Called periodically by step segment buffer. Mostly used internally by planner.
123 | uint8_t plan_next_block_index(uint8_t block_index);
124 |
125 | // Called by step segment buffer when computing executing block velocity profile.
126 | float plan_get_exec_block_exit_speed_sqr();
127 |
128 | // Called by main program during planner calculations and step segment buffer during initialization.
129 | float plan_compute_profile_nominal_speed(plan_block_t *block);
130 |
131 | // Re-calculates buffered motions profile parameters upon a motion-based override change.
132 | void plan_update_velocity_profile_parameters();
133 |
134 | // Reset the planner position vector (in steps)
135 | void plan_sync_position();
136 |
137 | // Reinitialize plan with a partially completed block
138 | void plan_cycle_reinitialize();
139 |
140 | // Returns the number of available blocks are in the planner buffer.
141 | uint8_t plan_get_block_buffer_available();
142 |
143 | // Returns the number of active blocks are in the planner buffer.
144 | // NOTE: Deprecated. Not used unless classic status reports are enabled in config.h
145 | uint8_t plan_get_block_buffer_count();
146 |
147 | // Returns the status of the block ring buffer. True, if buffer is full.
148 | uint8_t plan_check_full_buffer();
149 |
150 | void plan_get_planner_mpos(float *target);
151 |
152 |
153 | #endif
154 |
--------------------------------------------------------------------------------
/Libraries/grbl/print.c:
--------------------------------------------------------------------------------
1 | /*
2 | print.c - Functions for formatting output strings
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #include "grbl.h"
23 |
24 |
25 | void printString(const char *s)
26 | {
27 | while (*s)
28 | serial_write(*s++);
29 | }
30 |
31 | #ifdef AVRTARGET
32 | // Print a string stored in PGM-memory
33 | void printPgmString(const char *s)
34 | {
35 | char c;
36 | while ((c = pgm_read_byte_near(s++)))
37 | serial_write(c);
38 | }
39 | #endif
40 |
41 | // void printIntegerInBase(unsigned long n, unsigned long base)
42 | // {
43 | // unsigned char buf[8 * sizeof(long)]; // Assumes 8-bit chars.
44 | // unsigned long i = 0;
45 | //
46 | // if (n == 0) {
47 | // serial_write('0');
48 | // return;
49 | // }
50 | //
51 | // while (n > 0) {
52 | // buf[i++] = n % base;
53 | // n /= base;
54 | // }
55 | //
56 | // for (; i > 0; i--)
57 | // serial_write(buf[i - 1] < 10 ?
58 | // '0' + buf[i - 1] :
59 | // 'A' + buf[i - 1] - 10);
60 | // }
61 |
62 |
63 | // Prints an uint8 variable in base 10.
64 | void print_uint8_base10(uint8_t n)
65 | {
66 | uint8_t digit_a = 0;
67 | uint8_t digit_b = 0;
68 | if (n >= 100) { // 100-255
69 | digit_a = '0' + n % 10;
70 | n /= 10;
71 | }
72 | if (n >= 10) { // 10-99
73 | digit_b = '0' + n % 10;
74 | n /= 10;
75 | }
76 | serial_write('0' + n);
77 | if (digit_b) { serial_write(digit_b); }
78 | if (digit_a) { serial_write(digit_a); }
79 | }
80 |
81 |
82 | // Prints an uint8 variable in base 2 with desired number of desired digits.
83 | void print_uint8_base2_ndigit(uint8_t n, uint8_t digits) {
84 | #if defined(AVRTARGET) || defined(STM32F103C8)
85 | unsigned char buf[digits];
86 | #endif
87 | #ifdef WIN32
88 | unsigned char buf[20];
89 | #endif
90 | uint8_t i = 0;
91 |
92 | for (; i < digits; i++) {
93 | buf[i] = n % 2 ;
94 | n /= 2;
95 | }
96 |
97 | for (; i > 0; i--)
98 | serial_write('0' + buf[i - 1]);
99 | }
100 |
101 |
102 | void print_uint32_base10(uint32_t n)
103 | {
104 | if (n == 0) {
105 | serial_write('0');
106 | return;
107 | }
108 |
109 | unsigned char buf[10];
110 | uint8_t i = 0;
111 |
112 | while (n > 0) {
113 | buf[i++] = n % 10;
114 | n /= 10;
115 | }
116 |
117 | for (; i > 0; i--)
118 | serial_write('0' + buf[i-1]);
119 | }
120 |
121 |
122 | void printInteger(long n)
123 | {
124 | if (n < 0) {
125 | serial_write('-');
126 | print_uint32_base10(-n);
127 | } else {
128 | print_uint32_base10(n);
129 | }
130 | }
131 |
132 |
133 | // Convert float to string by immediately converting to a long integer, which contains
134 | // more digits than a float. Number of decimal places, which are tracked by a counter,
135 | // may be set by the user. The integer is then efficiently converted to a string.
136 | // NOTE: AVR '%' and '/' integer operations are very efficient. Bitshifting speed-up
137 | // techniques are actually just slightly slower. Found this out the hard way.
138 | void printFloat(float n, uint8_t decimal_places)
139 | {
140 | if (n < 0) {
141 | serial_write('-');
142 | n = -n;
143 | }
144 |
145 | uint8_t decimals = decimal_places;
146 | while (decimals >= 2) { // Quickly convert values expected to be E0 to E-4.
147 | n *= 100;
148 | decimals -= 2;
149 | }
150 | if (decimals) { n *= 10; }
151 | n += 0.5; // Add rounding factor. Ensures carryover through entire value.
152 |
153 | // Generate digits backwards and store in string.
154 | unsigned char buf[13];
155 | uint8_t i = 0;
156 | uint32_t a = (long)n;
157 | while(a > 0) {
158 | buf[i++] = (a % 10) + '0'; // Get digit
159 | a /= 10;
160 | }
161 | while (i < decimal_places) {
162 | buf[i++] = '0'; // Fill in zeros to decimal point for (n < 1)
163 | }
164 | if (i == decimal_places) { // Fill in leading zero, if needed.
165 | buf[i++] = '0';
166 | }
167 |
168 | // Print the generated string.
169 | for (; i > 0; i--) {
170 | if (i == decimal_places) { serial_write('.'); } // Insert decimal point in right place.
171 | serial_write(buf[i-1]);
172 | }
173 | }
174 |
175 |
176 | // Floating value printing handlers for special variables types used in Grbl and are defined
177 | // in the config.h.
178 | // - CoordValue: Handles all position or coordinate values in inches or mm reporting.
179 | // - RateValue: Handles feed rate and current velocity in inches or mm reporting.
180 | void printFloat_CoordValue(float n) {
181 | if (bit_istrue(settings.flags,BITFLAG_REPORT_INCHES)) {
182 | printFloat(n*INCH_PER_MM,N_DECIMAL_COORDVALUE_INCH);
183 | } else {
184 | printFloat(n,N_DECIMAL_COORDVALUE_MM);
185 | }
186 | }
187 |
188 | void printFloat_RateValue(float n) {
189 | if (bit_istrue(settings.flags,BITFLAG_REPORT_INCHES)) {
190 | printFloat(n*INCH_PER_MM,N_DECIMAL_RATEVALUE_INCH);
191 | } else {
192 | printFloat(n,N_DECIMAL_RATEVALUE_MM);
193 | }
194 | }
195 |
196 | // Debug tool to print free memory in bytes at the called point.
197 | // NOTE: Keep commented unless using. Part of this function always gets compiled in.
198 | // void printFreeMemory()
199 | // {
200 | // extern int __heap_start, *__brkval;
201 | // uint16_t free; // Up to 64k values.
202 | // free = (int) &free - (__brkval == 0 ? (int) &__heap_start : (int) __brkval);
203 | // printInteger((int32_t)free);
204 | // printString(" ");
205 | // }
206 |
--------------------------------------------------------------------------------
/Libraries/grbl/print.h:
--------------------------------------------------------------------------------
1 | /*
2 | print.h - Functions for formatting output strings
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef print_h
23 | #define print_h
24 |
25 |
26 | void printString(const char *s);
27 |
28 | void printPgmString(const char *s);
29 |
30 | void printInteger(long n);
31 |
32 | void print_uint32_base10(uint32_t n);
33 |
34 | // Prints an uint8 variable in base 10.
35 | void print_uint8_base10(uint8_t n);
36 |
37 | // Prints an uint8 variable in base 2 with desired number of desired digits.
38 | void print_uint8_base2_ndigit(uint8_t n, uint8_t digits);
39 |
40 | void printFloat(float n, uint8_t decimal_places);
41 |
42 | // Floating value printing handlers for special variables types used in Grbl.
43 | // - CoordValue: Handles all position or coordinate values in inches or mm reporting.
44 | // - RateValue: Handles feed rate and current velocity in inches or mm reporting.
45 | void printFloat_CoordValue(float n);
46 | void printFloat_RateValue(float n);
47 |
48 | // Debug tool to print free memory in bytes at the called point. Not used otherwise.
49 | void printFreeMemory();
50 |
51 | #endif
52 |
--------------------------------------------------------------------------------
/Libraries/grbl/probe.c:
--------------------------------------------------------------------------------
1 | /*
2 | probe.c - code pertaining to probing methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2014-2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #include "grbl.h"
22 |
23 |
24 | // Inverts the probe pin state depending on user settings and probing cycle mode.
25 | uint8_t probe_invert_mask;
26 |
27 |
28 | // Probe pin initialization routine.
29 | void probe_init()
30 | {
31 | #ifdef AVRTARGET
32 | PROBE_DDR &= ~(PROBE_MASK); // Configure as input pins
33 | #ifdef DISABLE_PROBE_PIN_PULL_UP
34 | PROBE_PORT &= ~(PROBE_MASK); // Normal low operation. Requires external pull-down.
35 | #else
36 | PROBE_PORT |= PROBE_MASK; // Enable internal pull-up resistors. Normal high operation.
37 | #endif
38 | #endif
39 | #ifdef STM32F103C8
40 | GPIO_InitTypeDef GPIO_InitStructure;
41 | RCC_APB2PeriphClockCmd(RCC_PROBE_PORT, ENABLE);
42 | GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
43 | #ifdef DISABLE_PROBE_PIN_PULL_UP
44 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
45 | #else
46 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
47 | #endif
48 | GPIO_InitStructure.GPIO_Pin = PROBE_MASK;
49 | GPIO_Init(PROBE_PORT, &GPIO_InitStructure);
50 | #endif
51 | probe_configure_invert_mask(false); // Initialize invert mask.
52 | }
53 |
54 |
55 | // Called by probe_init() and the mc_probe() routines. Sets up the probe pin invert mask to
56 | // appropriately set the pin logic according to setting for normal-high/normal-low operation
57 | // and the probing cycle modes for toward-workpiece/away-from-workpiece.
58 | void probe_configure_invert_mask(uint8_t is_probe_away)
59 | {
60 | probe_invert_mask = 0; // Initialize as zero.
61 | if (bit_isfalse(settings.flags,BITFLAG_INVERT_PROBE_PIN)) { probe_invert_mask ^= PROBE_MASK; }
62 | if (is_probe_away) { probe_invert_mask ^= PROBE_MASK; }
63 | }
64 |
65 |
66 | // Returns the probe pin state. Triggered = true. Called by gcode parser and probe state monitor.
67 | uint8_t probe_get_state()
68 | {
69 | #ifdef AVRTARGET
70 | return((PROBE_PIN & PROBE_MASK) ^ probe_invert_mask);
71 | #endif
72 | #ifdef WIN32
73 | return 0;
74 | #endif
75 | #ifdef STM32F103C8
76 | return ((GPIO_ReadInputData(PROBE_PORT) & PROBE_MASK) ^ probe_invert_mask) != 0;
77 | #endif
78 | }
79 |
80 |
81 | // Monitors probe pin state and records the system position when detected. Called by the
82 | // stepper ISR per ISR tick.
83 | // NOTE: This function must be extremely efficient as to not bog down the stepper ISR.
84 | void probe_state_monitor()
85 | {
86 | if (probe_get_state()) {
87 | sys_probe_state = PROBE_OFF;
88 | memcpy(sys_probe_position, sys_position, sizeof(sys_position));
89 | bit_true(sys_rt_exec_state, EXEC_MOTION_CANCEL);
90 | }
91 | }
92 |
--------------------------------------------------------------------------------
/Libraries/grbl/probe.h:
--------------------------------------------------------------------------------
1 | /*
2 | probe.h - code pertaining to probing methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2014-2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 |
21 | #ifndef probe_h
22 | #define probe_h
23 |
24 | // Values that define the probing state machine.
25 | #define PROBE_OFF 0 // Probing disabled or not in use. (Must be zero.)
26 | #define PROBE_ACTIVE 1 // Actively watching the input pin.
27 |
28 | // Probe pin initialization routine.
29 | void probe_init();
30 |
31 | // Called by probe_init() and the mc_probe() routines. Sets up the probe pin invert mask to
32 | // appropriately set the pin logic according to setting for normal-high/normal-low operation
33 | // and the probing cycle modes for toward-workpiece/away-from-workpiece.
34 | void probe_configure_invert_mask(uint8_t is_probe_away);
35 |
36 | // Returns probe pin state. Triggered = true. Called by gcode parser and probe state monitor.
37 | uint8_t probe_get_state();
38 |
39 | // Monitors probe pin state and records the system position when detected. Called by the
40 | // stepper ISR per ISR tick.
41 | void probe_state_monitor();
42 |
43 | #endif
44 |
--------------------------------------------------------------------------------
/Libraries/grbl/protocol.h:
--------------------------------------------------------------------------------
1 | /*
2 | protocol.h - controls Grbl execution protocol and procedures
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef protocol_h
23 | #define protocol_h
24 |
25 | // Line buffer size from the serial input stream to be executed.
26 | // NOTE: Not a problem except for extreme cases, but the line buffer size can be too small
27 | // and g-code blocks can get truncated. Officially, the g-code standards support up to 256
28 | // characters. In future versions, this will be increased, when we know how much extra
29 | // memory space we can invest into here or we re-write the g-code parser not to have this
30 | // buffer.
31 | #ifndef LINE_BUFFER_SIZE
32 | #define LINE_BUFFER_SIZE 80
33 | #endif
34 |
35 | // Starts Grbl main loop. It handles all incoming characters from the serial port and executes
36 | // them as they complete. It is also responsible for finishing the initialization procedures.
37 | void protocol_main_loop();
38 |
39 | // Checks and executes a realtime command at various stop points in main program
40 | void protocol_execute_realtime();
41 | void protocol_exec_rt_system();
42 |
43 | // Executes the auto cycle feature, if enabled.
44 | void protocol_auto_cycle_start();
45 |
46 | // Block until all buffered steps are executed
47 | void protocol_buffer_synchronize();
48 |
49 | #endif
50 |
--------------------------------------------------------------------------------
/Libraries/grbl/report.h:
--------------------------------------------------------------------------------
1 | /*
2 | report.h - reporting and messaging methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2012-2016 Sungeun K. Jeon for Gnea Research LLC
6 |
7 | Grbl is free software: you can redistribute it and/or modify
8 | it under the terms of the GNU General Public License as published by
9 | the Free Software Foundation, either version 3 of the License, or
10 | (at your option) any later version.
11 |
12 | Grbl is distributed in the hope that it will be useful,
13 | but WITHOUT ANY WARRANTY; without even the implied warranty of
14 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
15 | GNU General Public License for more details.
16 |
17 | You should have received a copy of the GNU General Public License
18 | along with Grbl. If not, see .
19 | */
20 | #ifndef report_h
21 | #define report_h
22 |
23 | // Define Grbl status codes. Valid values (0-255)
24 | #define STATUS_OK 0
25 | #define STATUS_EXPECTED_COMMAND_LETTER 1
26 | #define STATUS_BAD_NUMBER_FORMAT 2
27 | #define STATUS_INVALID_STATEMENT 3
28 | #define STATUS_NEGATIVE_VALUE 4
29 | #define STATUS_SETTING_DISABLED 5
30 | #define STATUS_SETTING_STEP_PULSE_MIN 6
31 | #define STATUS_SETTING_READ_FAIL 7
32 | #define STATUS_IDLE_ERROR 8
33 | #define STATUS_SYSTEM_GC_LOCK 9
34 | #define STATUS_SOFT_LIMIT_ERROR 10
35 | #define STATUS_OVERFLOW 11
36 | #define STATUS_MAX_STEP_RATE_EXCEEDED 12
37 | #define STATUS_CHECK_DOOR 13
38 | #define STATUS_LINE_LENGTH_EXCEEDED 14
39 | #define STATUS_TRAVEL_EXCEEDED 15
40 | #define STATUS_INVALID_JOG_COMMAND 16
41 | #define STATUS_SETTING_DISABLED_LASER 17
42 |
43 | #define STATUS_GCODE_UNSUPPORTED_COMMAND 20
44 | #define STATUS_GCODE_MODAL_GROUP_VIOLATION 21
45 | #define STATUS_GCODE_UNDEFINED_FEED_RATE 22
46 | #define STATUS_GCODE_COMMAND_VALUE_NOT_INTEGER 23
47 | #define STATUS_GCODE_AXIS_COMMAND_CONFLICT 24
48 | #define STATUS_GCODE_WORD_REPEATED 25
49 | #define STATUS_GCODE_NO_AXIS_WORDS 26
50 | #define STATUS_GCODE_INVALID_LINE_NUMBER 27
51 | #define STATUS_GCODE_VALUE_WORD_MISSING 28
52 | #define STATUS_GCODE_UNSUPPORTED_COORD_SYS 29
53 | #define STATUS_GCODE_G53_INVALID_MOTION_MODE 30
54 | #define STATUS_GCODE_AXIS_WORDS_EXIST 31
55 | #define STATUS_GCODE_NO_AXIS_WORDS_IN_PLANE 32
56 | #define STATUS_GCODE_INVALID_TARGET 33
57 | #define STATUS_GCODE_ARC_RADIUS_ERROR 34
58 | #define STATUS_GCODE_NO_OFFSETS_IN_PLANE 35
59 | #define STATUS_GCODE_UNUSED_WORDS 36
60 | #define STATUS_GCODE_G43_DYNAMIC_AXIS_ERROR 37
61 | #define STATUS_GCODE_MAX_VALUE_EXCEEDED 38
62 |
63 | // Define Grbl alarm codes. Valid values (1-255). 0 is reserved.
64 | #define ALARM_HARD_LIMIT_ERROR EXEC_ALARM_HARD_LIMIT
65 | #define ALARM_SOFT_LIMIT_ERROR EXEC_ALARM_SOFT_LIMIT
66 | #define ALARM_ABORT_CYCLE EXEC_ALARM_ABORT_CYCLE
67 | #define ALARM_PROBE_FAIL_INITIAL EXEC_ALARM_PROBE_FAIL_INITIAL
68 | #define ALARM_PROBE_FAIL_CONTACT EXEC_ALARM_PROBE_FAIL_CONTACT
69 | #define ALARM_HOMING_FAIL_RESET EXEC_ALARM_HOMING_FAIL_RESET
70 | #define ALARM_HOMING_FAIL_DOOR EXEC_ALARM_HOMING_FAIL_DOOR
71 | #define ALARM_HOMING_FAIL_PULLOFF EXEC_ALARM_HOMING_FAIL_PULLOFF
72 | #define ALARM_HOMING_FAIL_APPROACH EXEC_ALARM_HOMING_FAIL_APPROACH
73 |
74 | // Define Grbl feedback message codes. Valid values (0-255).
75 | #define MESSAGE_CRITICAL_EVENT 1
76 | #define MESSAGE_ALARM_LOCK 2
77 | #define MESSAGE_ALARM_UNLOCK 3
78 | #define MESSAGE_ENABLED 4
79 | #define MESSAGE_DISABLED 5
80 | #define MESSAGE_SAFETY_DOOR_AJAR 6
81 | #define MESSAGE_CHECK_LIMITS 7
82 | #define MESSAGE_PROGRAM_END 8
83 | #define MESSAGE_RESTORE_DEFAULTS 9
84 | #define MESSAGE_SPINDLE_RESTORE 10
85 | #define MESSAGE_SLEEP_MODE 11
86 |
87 | // Prints system status messages.
88 | void report_status_message(uint8_t status_code);
89 |
90 | // Prints system alarm messages.
91 | void report_alarm_message(uint8_t alarm_code);
92 |
93 | // Prints miscellaneous feedback messages.
94 | void report_feedback_message(uint8_t message_code);
95 |
96 | // Prints welcome message
97 | void report_init_message();
98 |
99 | // Prints Grbl help and current global settings
100 | void report_grbl_help();
101 |
102 | // Prints Grbl global settings
103 | void report_grbl_settings();
104 |
105 | // Prints an echo of the pre-parsed line received right before execution.
106 | void report_echo_line_received(char *line);
107 |
108 | // Prints realtime status report
109 | void report_realtime_status();
110 |
111 | // Prints recorded probe position
112 | void report_probe_parameters();
113 |
114 | // Prints Grbl NGC parameters (coordinate offsets, probe)
115 | void report_ngc_parameters();
116 |
117 | // Prints current g-code parser mode state
118 | void report_gcode_modes();
119 |
120 | // Prints startup line when requested and executed.
121 | void report_startup_line(uint8_t n, char *line);
122 | void report_execute_startup_message(char *line, uint8_t status_code);
123 |
124 | // Prints build info and user info
125 | void report_build_info(char *line);
126 |
127 | #ifdef DEBUG
128 | void report_realtime_debug();
129 | #endif
130 |
131 | #endif
132 |
--------------------------------------------------------------------------------
/Libraries/grbl/serial.c:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/Libraries/grbl/serial.c
--------------------------------------------------------------------------------
/Libraries/grbl/serial.h:
--------------------------------------------------------------------------------
1 | /*
2 | serial.c - Low level functions for sending and recieving bytes via the serial port
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef serial_h
23 | #define serial_h
24 |
25 | #ifdef AVRTARGET
26 | #ifndef RX_BUFFER_SIZE
27 | #define RX_BUFFER_SIZE 128
28 | #endif
29 | #ifndef TX_BUFFER_SIZE
30 | #ifdef USE_LINE_NUMBERS
31 | #define TX_BUFFER_SIZE 112
32 | #else
33 | #define TX_BUFFER_SIZE 104
34 | #endif
35 | #endif
36 | #else
37 | #define RX_BUFFER_SIZE 254
38 | #ifndef WIN32
39 | #define TX_BUFFER_SIZE 128 // Do not try 256 it will not work for STM32.
40 | #else
41 | #define TX_BUFFER_SIZE 254
42 | #endif
43 | #endif
44 |
45 | #define SERIAL_NO_DATA 0xff
46 |
47 | #ifdef WIN32
48 | void winserial_init(char *pPort);
49 | #endif
50 |
51 | void serial_init();
52 |
53 | // Writes one byte to the TX serial buffer. Called by main program.
54 | void serial_write(uint8_t data);
55 |
56 | // Fetches the first byte in the serial read buffer. Called by main program.
57 | uint8_t serial_read();
58 |
59 | // Reset and empty data in read buffer. Used by e-stop and reset.
60 | void serial_reset_read_buffer();
61 |
62 | // Returns the number of bytes available in the RX serial buffer.
63 | uint8_t serial_get_rx_buffer_available();
64 |
65 | // Returns the number of bytes used in the RX serial buffer.
66 | // NOTE: Deprecated. Not used unless classic status reports are enabled in config.h.
67 | uint8_t serial_get_rx_buffer_count();
68 |
69 | // Returns the number of bytes used in the TX serial buffer.
70 | // NOTE: Not used except for debugging and ensuring no TX bottlenecks.
71 | uint8_t serial_get_tx_buffer_count();
72 |
73 | #endif
74 |
--------------------------------------------------------------------------------
/Libraries/grbl/settings.h:
--------------------------------------------------------------------------------
1 | /*
2 | settings.h - eeprom configuration handling
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef settings_h
23 | #define settings_h
24 |
25 | #include "grbl.h"
26 |
27 |
28 | // Version of the EEPROM data. Will be used to migrate existing data from older versions of Grbl
29 | // when firmware is upgraded. Always stored in byte 0 of eeprom
30 | #define SETTINGS_VERSION 10 // NOTE: Check settings_reset() when moving to next version.
31 |
32 | // Define bit flag masks for the boolean settings in settings.flag.
33 | #define BITFLAG_REPORT_INCHES bit(0)
34 | #define BITFLAG_LASER_MODE bit(1)
35 | #define BITFLAG_INVERT_ST_ENABLE bit(2)
36 | #define BITFLAG_HARD_LIMIT_ENABLE bit(3)
37 | #define BITFLAG_HOMING_ENABLE bit(4)
38 | #define BITFLAG_SOFT_LIMIT_ENABLE bit(5)
39 | #define BITFLAG_INVERT_LIMIT_PINS bit(6)
40 | #define BITFLAG_INVERT_PROBE_PIN bit(7)
41 |
42 | // Define status reporting boolean enable bit flags in settings.status_report_mask
43 | #define BITFLAG_RT_STATUS_POSITION_TYPE bit(0)
44 | #define BITFLAG_RT_STATUS_BUFFER_STATE bit(1)
45 |
46 | // Define settings restore bitflags.
47 | #define SETTINGS_RESTORE_DEFAULTS bit(0)
48 | #define SETTINGS_RESTORE_PARAMETERS bit(1)
49 | #define SETTINGS_RESTORE_STARTUP_LINES bit(2)
50 | #define SETTINGS_RESTORE_BUILD_INFO bit(3)
51 | #ifndef SETTINGS_RESTORE_ALL
52 | #define SETTINGS_RESTORE_ALL 0xFF // All bitflags
53 | #endif
54 |
55 | // Define EEPROM memory address location values for Grbl settings and parameters
56 | // NOTE: The Atmega328p has 1KB EEPROM. The upper half is reserved for parameters and
57 | // the startup script. The lower half contains the global settings and space for future
58 | // developments.
59 | #define EEPROM_ADDR_GLOBAL 1U
60 | #define EEPROM_ADDR_PARAMETERS 512U
61 | #define EEPROM_ADDR_STARTUP_BLOCK 768U
62 | #define EEPROM_ADDR_BUILD_INFO 942U
63 |
64 | // Define EEPROM address indexing for coordinate parameters
65 | #define N_COORDINATE_SYSTEM 6 // Number of supported work coordinate systems (from index 1)
66 | #define SETTING_INDEX_NCOORD N_COORDINATE_SYSTEM+1 // Total number of system stored (from index 0)
67 | // NOTE: Work coordinate indices are (0=G54, 1=G55, ... , 6=G59)
68 | #define SETTING_INDEX_G28 N_COORDINATE_SYSTEM // Home position 1
69 | #define SETTING_INDEX_G30 N_COORDINATE_SYSTEM+1 // Home position 2
70 | // #define SETTING_INDEX_G92 N_COORDINATE_SYSTEM+2 // Coordinate offset (G92.2,G92.3 not supported)
71 |
72 | // Define Grbl axis settings numbering scheme. Starts at START_VAL, every INCREMENT, over N_SETTINGS.
73 | #define AXIS_N_SETTINGS 4
74 | #define AXIS_SETTINGS_START_VAL 100 // NOTE: Reserving settings values >= 100 for axis settings. Up to 255.
75 | #define AXIS_SETTINGS_INCREMENT 10 // Must be greater than the number of axis settings
76 |
77 | // Global persistent settings (Stored from byte EEPROM_ADDR_GLOBAL onwards)
78 | typedef struct {
79 | // Axis settings
80 | float steps_per_mm[N_AXIS];
81 | float max_rate[N_AXIS];
82 | float acceleration[N_AXIS];
83 | float max_travel[N_AXIS];
84 |
85 | // Remaining Grbl settings
86 | uint8_t pulse_microseconds;
87 | uint8_t step_invert_mask;
88 | uint8_t dir_invert_mask;
89 | uint8_t stepper_idle_lock_time; // If max value 255, steppers do not disable.
90 | uint8_t status_report_mask; // Mask to indicate desired report data.
91 | float junction_deviation;
92 | float arc_tolerance;
93 |
94 | float rpm_max;
95 | float rpm_min;
96 |
97 | uint8_t flags; // Contains default boolean settings
98 |
99 | uint8_t homing_dir_mask;
100 | float homing_feed_rate;
101 | float homing_seek_rate;
102 | uint16_t homing_debounce_delay;
103 | float homing_pulloff;
104 | } settings_t;
105 | extern settings_t settings;
106 |
107 | // Initialize the configuration subsystem (load settings from EEPROM)
108 | void settings_init();
109 |
110 | // Helper function to clear and restore EEPROM defaults
111 | void settings_restore(uint8_t restore_flag);
112 |
113 | // A helper method to set new settings from command line
114 | uint8_t settings_store_global_setting(uint8_t parameter, float value);
115 |
116 | // Stores the protocol line variable as a startup line in EEPROM
117 | void settings_store_startup_line(uint8_t n, char *line);
118 |
119 | // Reads an EEPROM startup line to the protocol line variable
120 | uint8_t settings_read_startup_line(uint8_t n, char *line);
121 |
122 | // Stores build info user-defined string
123 | void settings_store_build_info(char *line);
124 |
125 | // Reads build info user-defined string
126 | uint8_t settings_read_build_info(char *line);
127 |
128 | // Writes selected coordinate data to EEPROM
129 | void settings_write_coord_data(uint8_t coord_select, float *coord_data);
130 |
131 | // Reads selected coordinate data from EEPROM
132 | uint8_t settings_read_coord_data(uint8_t coord_select, float *coord_data);
133 |
134 | #endif
135 |
--------------------------------------------------------------------------------
/Libraries/grbl/spindle_control.h:
--------------------------------------------------------------------------------
1 | /*
2 | spindle_control.h - spindle control methods
3 | Part of Grbl
4 |
5 | Copyright (c) 2012-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef spindle_control_h
23 | #define spindle_control_h
24 |
25 | #define SPINDLE_NO_SYNC false
26 | #define SPINDLE_FORCE_SYNC true
27 |
28 | #define SPINDLE_STATE_DISABLE 0 // Must be zero.
29 | #define SPINDLE_STATE_CW bit(0)
30 | #define SPINDLE_STATE_CCW bit(1)
31 |
32 |
33 | // Initializes spindle pins and hardware PWM, if enabled.
34 | void spindle_init();
35 |
36 | // Returns current spindle output state. Overrides may alter it from programmed states.
37 | uint8_t spindle_get_state();
38 |
39 | // Called by g-code parser when setting spindle state and requires a buffer sync.
40 | // Immediately sets spindle running state with direction and spindle rpm via PWM, if enabled.
41 | // Called by spindle_sync() after sync and parking motion/spindle stop override during restore.
42 | #ifdef VARIABLE_SPINDLE
43 | #ifdef STM32F103C8
44 | #define SPINDLE_PWM_TYPE uint16_t
45 | #else
46 | #define SPINDLE_PWM_TYPE uint8_t
47 | #endif
48 |
49 | // Called by g-code parser when setting spindle state and requires a buffer sync.
50 | void spindle_sync(uint8_t state, float rpm);
51 |
52 | // Sets spindle running state with direction, enable, and spindle PWM.
53 | void spindle_set_state(uint8_t state, float rpm);
54 |
55 | // Sets spindle PWM quickly for stepper ISR. Also called by spindle_set_state().
56 | // NOTE: 328p PWM register is 8-bit.
57 | void spindle_set_speed(SPINDLE_PWM_TYPE pwm_value);
58 |
59 | // Computes 328p-specific PWM register value for the given RPM for quick updating.
60 | SPINDLE_PWM_TYPE spindle_compute_pwm_value(float rpm);
61 |
62 | #else
63 |
64 | // Called by g-code parser when setting spindle state and requires a buffer sync.
65 | #define spindle_sync(state, rpm) _spindle_sync(state)
66 | void _spindle_sync(uint8_t state);
67 |
68 | // Sets spindle running state with direction and enable.
69 | #define spindle_set_state(state, rpm) _spindle_set_state(state)
70 | void _spindle_set_state(uint8_t state);
71 |
72 | #endif
73 |
74 | // Stop and start spindle routines. Called by all spindle routines and stepper ISR.
75 | void spindle_stop();
76 |
77 |
78 | #endif
79 |
--------------------------------------------------------------------------------
/Libraries/grbl/stepper.h:
--------------------------------------------------------------------------------
1 | /*
2 | stepper.h - stepper motor driver: executes motion plans of planner.c using the stepper motors
3 | Part of Grbl
4 |
5 | Copyright (c) 2011-2016 Sungeun K. Jeon for Gnea Research LLC
6 | Copyright (c) 2009-2011 Simen Svale Skogsrud
7 |
8 | Grbl is free software: you can redistribute it and/or modify
9 | it under the terms of the GNU General Public License as published by
10 | the Free Software Foundation, either version 3 of the License, or
11 | (at your option) any later version.
12 |
13 | Grbl is distributed in the hope that it will be useful,
14 | but WITHOUT ANY WARRANTY; without even the implied warranty of
15 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
16 | GNU General Public License for more details.
17 |
18 | You should have received a copy of the GNU General Public License
19 | along with Grbl. If not, see .
20 | */
21 |
22 | #ifndef stepper_h
23 | #define stepper_h
24 |
25 | #ifndef SEGMENT_BUFFER_SIZE
26 | #ifdef AVRTARGET
27 | #define SEGMENT_BUFFER_SIZE 6
28 | #else
29 | #define SEGMENT_BUFFER_SIZE 10
30 | #endif
31 | #endif
32 |
33 | // Initialize and setup the stepper motor subsystem
34 | void stepper_init();
35 |
36 | // Enable steppers, but cycle does not start unless called by motion control or realtime command.
37 | void st_wake_up();
38 |
39 | // Immediately disables steppers
40 | void st_go_idle();
41 |
42 | // Generate the step and direction port invert masks.
43 | void st_generate_step_dir_invert_masks();
44 |
45 | // Reset the stepper subsystem variables
46 | void st_reset();
47 |
48 | // Changes the run state of the step segment buffer to execute the special parking motion.
49 | void st_parking_setup_buffer();
50 |
51 | // Restores the step segment buffer to the normal run state after a parking motion.
52 | void st_parking_restore_buffer();
53 |
54 | // Reloads step segment buffer. Called continuously by realtime execution system.
55 | void st_prep_buffer();
56 |
57 | // Called by planner_recalculate() when the executing block is updated by the new plan.
58 | void st_update_plan_block_parameters();
59 |
60 | // Called by realtime status reporting if realtime rate reporting is enabled in config.h.
61 | float st_get_realtime_rate();
62 |
63 | extern const PORTPINDEF step_pin_mask[N_AXIS];
64 | extern const PORTPINDEF direction_pin_mask[N_AXIS];
65 | extern const PORTPINDEF limit_pin_mask[N_AXIS];
66 |
67 | #endif
68 |
--------------------------------------------------------------------------------
/Libraries/stm_lib/inc/stm32f10x_exti.h:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file stm32f10x_exti.h
4 | * @author MCD Application Team
5 | * @version V3.5.0
6 | * @date 11-March-2011
7 | * @brief This file contains all the functions prototypes for the EXTI firmware
8 | * library.
9 | ******************************************************************************
10 | * @attention
11 | *
12 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
13 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
14 | * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
15 | * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
16 | * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
17 | * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
18 | *
19 | * © COPYRIGHT 2011 STMicroelectronics
20 | ******************************************************************************
21 | */
22 |
23 | /* Define to prevent recursive inclusion -------------------------------------*/
24 | #ifndef __STM32F10x_EXTI_H
25 | #define __STM32F10x_EXTI_H
26 |
27 | #ifdef __cplusplus
28 | extern "C" {
29 | #endif
30 |
31 | /* Includes ------------------------------------------------------------------*/
32 | #include "stm32f10x.h"
33 |
34 | /** @addtogroup STM32F10x_StdPeriph_Driver
35 | * @{
36 | */
37 |
38 | /** @addtogroup EXTI
39 | * @{
40 | */
41 |
42 | /** @defgroup EXTI_Exported_Types
43 | * @{
44 | */
45 |
46 | /**
47 | * @brief EXTI mode enumeration
48 | */
49 |
50 | typedef enum
51 | {
52 | EXTI_Mode_Interrupt = 0x00,
53 | EXTI_Mode_Event = 0x04
54 | }EXTIMode_TypeDef;
55 |
56 | #define IS_EXTI_MODE(MODE) (((MODE) == EXTI_Mode_Interrupt) || ((MODE) == EXTI_Mode_Event))
57 |
58 | /**
59 | * @brief EXTI Trigger enumeration
60 | */
61 |
62 | typedef enum
63 | {
64 | EXTI_Trigger_Rising = 0x08,
65 | EXTI_Trigger_Falling = 0x0C,
66 | EXTI_Trigger_Rising_Falling = 0x10
67 | }EXTITrigger_TypeDef;
68 |
69 | #define IS_EXTI_TRIGGER(TRIGGER) (((TRIGGER) == EXTI_Trigger_Rising) || \
70 | ((TRIGGER) == EXTI_Trigger_Falling) || \
71 | ((TRIGGER) == EXTI_Trigger_Rising_Falling))
72 | /**
73 | * @brief EXTI Init Structure definition
74 | */
75 |
76 | typedef struct
77 | {
78 | uint32_t EXTI_Line; /*!< Specifies the EXTI lines to be enabled or disabled.
79 | This parameter can be any combination of @ref EXTI_Lines */
80 |
81 | EXTIMode_TypeDef EXTI_Mode; /*!< Specifies the mode for the EXTI lines.
82 | This parameter can be a value of @ref EXTIMode_TypeDef */
83 |
84 | EXTITrigger_TypeDef EXTI_Trigger; /*!< Specifies the trigger signal active edge for the EXTI lines.
85 | This parameter can be a value of @ref EXTIMode_TypeDef */
86 |
87 | FunctionalState EXTI_LineCmd; /*!< Specifies the new state of the selected EXTI lines.
88 | This parameter can be set either to ENABLE or DISABLE */
89 | }EXTI_InitTypeDef;
90 |
91 | /**
92 | * @}
93 | */
94 |
95 | /** @defgroup EXTI_Exported_Constants
96 | * @{
97 | */
98 |
99 | /** @defgroup EXTI_Lines
100 | * @{
101 | */
102 |
103 | #define EXTI_Line0 ((uint32_t)0x00001) /*!< External interrupt line 0 */
104 | #define EXTI_Line1 ((uint32_t)0x00002) /*!< External interrupt line 1 */
105 | #define EXTI_Line2 ((uint32_t)0x00004) /*!< External interrupt line 2 */
106 | #define EXTI_Line3 ((uint32_t)0x00008) /*!< External interrupt line 3 */
107 | #define EXTI_Line4 ((uint32_t)0x00010) /*!< External interrupt line 4 */
108 | #define EXTI_Line5 ((uint32_t)0x00020) /*!< External interrupt line 5 */
109 | #define EXTI_Line6 ((uint32_t)0x00040) /*!< External interrupt line 6 */
110 | #define EXTI_Line7 ((uint32_t)0x00080) /*!< External interrupt line 7 */
111 | #define EXTI_Line8 ((uint32_t)0x00100) /*!< External interrupt line 8 */
112 | #define EXTI_Line9 ((uint32_t)0x00200) /*!< External interrupt line 9 */
113 | #define EXTI_Line10 ((uint32_t)0x00400) /*!< External interrupt line 10 */
114 | #define EXTI_Line11 ((uint32_t)0x00800) /*!< External interrupt line 11 */
115 | #define EXTI_Line12 ((uint32_t)0x01000) /*!< External interrupt line 12 */
116 | #define EXTI_Line13 ((uint32_t)0x02000) /*!< External interrupt line 13 */
117 | #define EXTI_Line14 ((uint32_t)0x04000) /*!< External interrupt line 14 */
118 | #define EXTI_Line15 ((uint32_t)0x08000) /*!< External interrupt line 15 */
119 | #define EXTI_Line16 ((uint32_t)0x10000) /*!< External interrupt line 16 Connected to the PVD Output */
120 | #define EXTI_Line17 ((uint32_t)0x20000) /*!< External interrupt line 17 Connected to the RTC Alarm event */
121 | #define EXTI_Line18 ((uint32_t)0x40000) /*!< External interrupt line 18 Connected to the USB Device/USB OTG FS
122 | Wakeup from suspend event */
123 | #define EXTI_Line19 ((uint32_t)0x80000) /*!< External interrupt line 19 Connected to the Ethernet Wakeup event */
124 |
125 | #define IS_EXTI_LINE(LINE) ((((LINE) & (uint32_t)0xFFF00000) == 0x00) && ((LINE) != (uint16_t)0x00))
126 | #define IS_GET_EXTI_LINE(LINE) (((LINE) == EXTI_Line0) || ((LINE) == EXTI_Line1) || \
127 | ((LINE) == EXTI_Line2) || ((LINE) == EXTI_Line3) || \
128 | ((LINE) == EXTI_Line4) || ((LINE) == EXTI_Line5) || \
129 | ((LINE) == EXTI_Line6) || ((LINE) == EXTI_Line7) || \
130 | ((LINE) == EXTI_Line8) || ((LINE) == EXTI_Line9) || \
131 | ((LINE) == EXTI_Line10) || ((LINE) == EXTI_Line11) || \
132 | ((LINE) == EXTI_Line12) || ((LINE) == EXTI_Line13) || \
133 | ((LINE) == EXTI_Line14) || ((LINE) == EXTI_Line15) || \
134 | ((LINE) == EXTI_Line16) || ((LINE) == EXTI_Line17) || \
135 | ((LINE) == EXTI_Line18) || ((LINE) == EXTI_Line19))
136 |
137 |
138 | /**
139 | * @}
140 | */
141 |
142 | /**
143 | * @}
144 | */
145 |
146 | /** @defgroup EXTI_Exported_Macros
147 | * @{
148 | */
149 |
150 | /**
151 | * @}
152 | */
153 |
154 | /** @defgroup EXTI_Exported_Functions
155 | * @{
156 | */
157 |
158 | void EXTI_DeInit(void);
159 | void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct);
160 | void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct);
161 | void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);
162 | FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);
163 | void EXTI_ClearFlag(uint32_t EXTI_Line);
164 | ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);
165 | void EXTI_ClearITPendingBit(uint32_t EXTI_Line);
166 |
167 | #ifdef __cplusplus
168 | }
169 | #endif
170 |
171 | #endif /* __STM32F10x_EXTI_H */
172 | /**
173 | * @}
174 | */
175 |
176 | /**
177 | * @}
178 | */
179 |
180 | /**
181 | * @}
182 | */
183 |
184 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
185 |
--------------------------------------------------------------------------------
/Libraries/stm_lib/src/misc.c:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file misc.c
4 | * @author MCD Application Team
5 | * @version V3.5.0
6 | * @date 11-March-2011
7 | * @brief This file provides all the miscellaneous firmware functions (add-on
8 | * to CMSIS functions).
9 | ******************************************************************************
10 | * @attention
11 | *
12 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
13 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
14 | * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
15 | * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
16 | * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
17 | * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
18 | *
19 | * © COPYRIGHT 2011 STMicroelectronics
20 | ******************************************************************************
21 | */
22 |
23 | /* Includes ------------------------------------------------------------------*/
24 | #include "misc.h"
25 |
26 | /** @addtogroup STM32F10x_StdPeriph_Driver
27 | * @{
28 | */
29 |
30 | /** @defgroup MISC
31 | * @brief MISC driver modules
32 | * @{
33 | */
34 |
35 | /** @defgroup MISC_Private_TypesDefinitions
36 | * @{
37 | */
38 |
39 | /**
40 | * @}
41 | */
42 |
43 | /** @defgroup MISC_Private_Defines
44 | * @{
45 | */
46 |
47 | #define AIRCR_VECTKEY_MASK ((uint32_t)0x05FA0000)
48 | /**
49 | * @}
50 | */
51 |
52 | /** @defgroup MISC_Private_Macros
53 | * @{
54 | */
55 |
56 | /**
57 | * @}
58 | */
59 |
60 | /** @defgroup MISC_Private_Variables
61 | * @{
62 | */
63 |
64 | /**
65 | * @}
66 | */
67 |
68 | /** @defgroup MISC_Private_FunctionPrototypes
69 | * @{
70 | */
71 |
72 | /**
73 | * @}
74 | */
75 |
76 | /** @defgroup MISC_Private_Functions
77 | * @{
78 | */
79 |
80 | /**
81 | * @brief Configures the priority grouping: pre-emption priority and subpriority.
82 | * @param NVIC_PriorityGroup: specifies the priority grouping bits length.
83 | * This parameter can be one of the following values:
84 | * @arg NVIC_PriorityGroup_0: 0 bits for pre-emption priority
85 | * 4 bits for subpriority
86 | * @arg NVIC_PriorityGroup_1: 1 bits for pre-emption priority
87 | * 3 bits for subpriority
88 | * @arg NVIC_PriorityGroup_2: 2 bits for pre-emption priority
89 | * 2 bits for subpriority
90 | * @arg NVIC_PriorityGroup_3: 3 bits for pre-emption priority
91 | * 1 bits for subpriority
92 | * @arg NVIC_PriorityGroup_4: 4 bits for pre-emption priority
93 | * 0 bits for subpriority
94 | * @retval None
95 | */
96 | void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
97 | {
98 | /* Check the parameters */
99 | assert_param(IS_NVIC_PRIORITY_GROUP(NVIC_PriorityGroup));
100 |
101 | /* Set the PRIGROUP[10:8] bits according to NVIC_PriorityGroup value */
102 | SCB->AIRCR = AIRCR_VECTKEY_MASK | NVIC_PriorityGroup;
103 | }
104 |
105 | /**
106 | * @brief Initializes the NVIC peripheral according to the specified
107 | * parameters in the NVIC_InitStruct.
108 | * @param NVIC_InitStruct: pointer to a NVIC_InitTypeDef structure that contains
109 | * the configuration information for the specified NVIC peripheral.
110 | * @retval None
111 | */
112 | void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
113 | {
114 | uint32_t tmppriority = 0x00, tmppre = 0x00, tmpsub = 0x0F;
115 |
116 | /* Check the parameters */
117 | assert_param(IS_FUNCTIONAL_STATE(NVIC_InitStruct->NVIC_IRQChannelCmd));
118 | assert_param(IS_NVIC_PREEMPTION_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority));
119 | assert_param(IS_NVIC_SUB_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelSubPriority));
120 |
121 | if (NVIC_InitStruct->NVIC_IRQChannelCmd != DISABLE)
122 | {
123 | /* Compute the Corresponding IRQ Priority --------------------------------*/
124 | tmppriority = (0x700 - ((SCB->AIRCR) & (uint32_t)0x700))>> 0x08;
125 | tmppre = (0x4 - tmppriority);
126 | tmpsub = tmpsub >> tmppriority;
127 |
128 | tmppriority = (uint32_t)NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority << tmppre;
129 | tmppriority |= NVIC_InitStruct->NVIC_IRQChannelSubPriority & tmpsub;
130 | tmppriority = tmppriority << 0x04;
131 |
132 | NVIC->IP[NVIC_InitStruct->NVIC_IRQChannel] = tmppriority;
133 |
134 | /* Enable the Selected IRQ Channels --------------------------------------*/
135 | NVIC->ISER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =
136 | (uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
137 | }
138 | else
139 | {
140 | /* Disable the Selected IRQ Channels -------------------------------------*/
141 | NVIC->ICER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =
142 | (uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
143 | }
144 | }
145 |
146 | /**
147 | * @brief Sets the vector table location and Offset.
148 | * @param NVIC_VectTab: specifies if the vector table is in RAM or FLASH memory.
149 | * This parameter can be one of the following values:
150 | * @arg NVIC_VectTab_RAM
151 | * @arg NVIC_VectTab_FLASH
152 | * @param Offset: Vector Table base offset field. This value must be a multiple
153 | * of 0x200.
154 | * @retval None
155 | */
156 | void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset)
157 | {
158 | /* Check the parameters */
159 | assert_param(IS_NVIC_VECTTAB(NVIC_VectTab));
160 | assert_param(IS_NVIC_OFFSET(Offset));
161 |
162 | SCB->VTOR = NVIC_VectTab | (Offset & (uint32_t)0x1FFFFF80);
163 | }
164 |
165 | /**
166 | * @brief Selects the condition for the system to enter low power mode.
167 | * @param LowPowerMode: Specifies the new mode for the system to enter low power mode.
168 | * This parameter can be one of the following values:
169 | * @arg NVIC_LP_SEVONPEND
170 | * @arg NVIC_LP_SLEEPDEEP
171 | * @arg NVIC_LP_SLEEPONEXIT
172 | * @param NewState: new state of LP condition. This parameter can be: ENABLE or DISABLE.
173 | * @retval None
174 | */
175 | void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState)
176 | {
177 | /* Check the parameters */
178 | assert_param(IS_NVIC_LP(LowPowerMode));
179 | assert_param(IS_FUNCTIONAL_STATE(NewState));
180 |
181 | if (NewState != DISABLE)
182 | {
183 | SCB->SCR |= LowPowerMode;
184 | }
185 | else
186 | {
187 | SCB->SCR &= (uint32_t)(~(uint32_t)LowPowerMode);
188 | }
189 | }
190 |
191 | /**
192 | * @brief Configures the SysTick clock source.
193 | * @param SysTick_CLKSource: specifies the SysTick clock source.
194 | * This parameter can be one of the following values:
195 | * @arg SysTick_CLKSource_HCLK_Div8: AHB clock divided by 8 selected as SysTick clock source.
196 | * @arg SysTick_CLKSource_HCLK: AHB clock selected as SysTick clock source.
197 | * @retval None
198 | */
199 | void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource)
200 | {
201 | /* Check the parameters */
202 | assert_param(IS_SYSTICK_CLK_SOURCE(SysTick_CLKSource));
203 | if (SysTick_CLKSource == SysTick_CLKSource_HCLK)
204 | {
205 | SysTick->CTRL |= SysTick_CLKSource_HCLK;
206 | }
207 | else
208 | {
209 | SysTick->CTRL &= SysTick_CLKSource_HCLK_Div8;
210 | }
211 | }
212 |
213 | /**
214 | * @}
215 | */
216 |
217 | /**
218 | * @}
219 | */
220 |
221 | /**
222 | * @}
223 | */
224 |
225 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
226 |
--------------------------------------------------------------------------------
/Libraries/stm_lib/src/stm32f10x_exti.c:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file stm32f10x_exti.c
4 | * @author MCD Application Team
5 | * @version V3.5.0
6 | * @date 11-March-2011
7 | * @brief This file provides all the EXTI firmware functions.
8 | ******************************************************************************
9 | * @attention
10 | *
11 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
12 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
13 | * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
14 | * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
15 | * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
16 | * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
17 | *
18 | * © COPYRIGHT 2011 STMicroelectronics
19 | ******************************************************************************
20 | */
21 |
22 | /* Includes ------------------------------------------------------------------*/
23 | #include "stm32f10x_exti.h"
24 |
25 | /** @addtogroup STM32F10x_StdPeriph_Driver
26 | * @{
27 | */
28 |
29 | /** @defgroup EXTI
30 | * @brief EXTI driver modules
31 | * @{
32 | */
33 |
34 | /** @defgroup EXTI_Private_TypesDefinitions
35 | * @{
36 | */
37 |
38 | /**
39 | * @}
40 | */
41 |
42 | /** @defgroup EXTI_Private_Defines
43 | * @{
44 | */
45 |
46 | #define EXTI_LINENONE ((uint32_t)0x00000) /* No interrupt selected */
47 |
48 | /**
49 | * @}
50 | */
51 |
52 | /** @defgroup EXTI_Private_Macros
53 | * @{
54 | */
55 |
56 | /**
57 | * @}
58 | */
59 |
60 | /** @defgroup EXTI_Private_Variables
61 | * @{
62 | */
63 |
64 | /**
65 | * @}
66 | */
67 |
68 | /** @defgroup EXTI_Private_FunctionPrototypes
69 | * @{
70 | */
71 |
72 | /**
73 | * @}
74 | */
75 |
76 | /** @defgroup EXTI_Private_Functions
77 | * @{
78 | */
79 |
80 | /**
81 | * @brief Deinitializes the EXTI peripheral registers to their default reset values.
82 | * @param None
83 | * @retval None
84 | */
85 | void EXTI_DeInit(void)
86 | {
87 | EXTI->IMR = 0x00000000;
88 | EXTI->EMR = 0x00000000;
89 | EXTI->RTSR = 0x00000000;
90 | EXTI->FTSR = 0x00000000;
91 | EXTI->PR = 0x000FFFFF;
92 | }
93 |
94 | /**
95 | * @brief Initializes the EXTI peripheral according to the specified
96 | * parameters in the EXTI_InitStruct.
97 | * @param EXTI_InitStruct: pointer to a EXTI_InitTypeDef structure
98 | * that contains the configuration information for the EXTI peripheral.
99 | * @retval None
100 | */
101 | void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct)
102 | {
103 | uint32_t tmp = 0;
104 |
105 | /* Check the parameters */
106 | assert_param(IS_EXTI_MODE(EXTI_InitStruct->EXTI_Mode));
107 | assert_param(IS_EXTI_TRIGGER(EXTI_InitStruct->EXTI_Trigger));
108 | assert_param(IS_EXTI_LINE(EXTI_InitStruct->EXTI_Line));
109 | assert_param(IS_FUNCTIONAL_STATE(EXTI_InitStruct->EXTI_LineCmd));
110 |
111 | tmp = (uint32_t)EXTI_BASE;
112 |
113 | if (EXTI_InitStruct->EXTI_LineCmd != DISABLE)
114 | {
115 | /* Clear EXTI line configuration */
116 | EXTI->IMR &= ~EXTI_InitStruct->EXTI_Line;
117 | EXTI->EMR &= ~EXTI_InitStruct->EXTI_Line;
118 |
119 | tmp += EXTI_InitStruct->EXTI_Mode;
120 |
121 | *(__IO uint32_t *) tmp |= EXTI_InitStruct->EXTI_Line;
122 |
123 | /* Clear Rising Falling edge configuration */
124 | EXTI->RTSR &= ~EXTI_InitStruct->EXTI_Line;
125 | EXTI->FTSR &= ~EXTI_InitStruct->EXTI_Line;
126 |
127 | /* Select the trigger for the selected external interrupts */
128 | if (EXTI_InitStruct->EXTI_Trigger == EXTI_Trigger_Rising_Falling)
129 | {
130 | /* Rising Falling edge */
131 | EXTI->RTSR |= EXTI_InitStruct->EXTI_Line;
132 | EXTI->FTSR |= EXTI_InitStruct->EXTI_Line;
133 | }
134 | else
135 | {
136 | tmp = (uint32_t)EXTI_BASE;
137 | tmp += EXTI_InitStruct->EXTI_Trigger;
138 |
139 | *(__IO uint32_t *) tmp |= EXTI_InitStruct->EXTI_Line;
140 | }
141 | }
142 | else
143 | {
144 | tmp += EXTI_InitStruct->EXTI_Mode;
145 |
146 | /* Disable the selected external lines */
147 | *(__IO uint32_t *) tmp &= ~EXTI_InitStruct->EXTI_Line;
148 | }
149 | }
150 |
151 | /**
152 | * @brief Fills each EXTI_InitStruct member with its reset value.
153 | * @param EXTI_InitStruct: pointer to a EXTI_InitTypeDef structure which will
154 | * be initialized.
155 | * @retval None
156 | */
157 | void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct)
158 | {
159 | EXTI_InitStruct->EXTI_Line = EXTI_LINENONE;
160 | EXTI_InitStruct->EXTI_Mode = EXTI_Mode_Interrupt;
161 | EXTI_InitStruct->EXTI_Trigger = EXTI_Trigger_Falling;
162 | EXTI_InitStruct->EXTI_LineCmd = DISABLE;
163 | }
164 |
165 | /**
166 | * @brief Generates a Software interrupt.
167 | * @param EXTI_Line: specifies the EXTI lines to be enabled or disabled.
168 | * This parameter can be any combination of EXTI_Linex where x can be (0..19).
169 | * @retval None
170 | */
171 | void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line)
172 | {
173 | /* Check the parameters */
174 | assert_param(IS_EXTI_LINE(EXTI_Line));
175 |
176 | EXTI->SWIER |= EXTI_Line;
177 | }
178 |
179 | /**
180 | * @brief Checks whether the specified EXTI line flag is set or not.
181 | * @param EXTI_Line: specifies the EXTI line flag to check.
182 | * This parameter can be:
183 | * @arg EXTI_Linex: External interrupt line x where x(0..19)
184 | * @retval The new state of EXTI_Line (SET or RESET).
185 | */
186 | FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line)
187 | {
188 | FlagStatus bitstatus = RESET;
189 | /* Check the parameters */
190 | assert_param(IS_GET_EXTI_LINE(EXTI_Line));
191 |
192 | if ((EXTI->PR & EXTI_Line) != (uint32_t)RESET)
193 | {
194 | bitstatus = SET;
195 | }
196 | else
197 | {
198 | bitstatus = RESET;
199 | }
200 | return bitstatus;
201 | }
202 |
203 | /**
204 | * @brief Clears the EXTI's line pending flags.
205 | * @param EXTI_Line: specifies the EXTI lines flags to clear.
206 | * This parameter can be any combination of EXTI_Linex where x can be (0..19).
207 | * @retval None
208 | */
209 | void EXTI_ClearFlag(uint32_t EXTI_Line)
210 | {
211 | /* Check the parameters */
212 | assert_param(IS_EXTI_LINE(EXTI_Line));
213 |
214 | EXTI->PR = EXTI_Line;
215 | }
216 |
217 | /**
218 | * @brief Checks whether the specified EXTI line is asserted or not.
219 | * @param EXTI_Line: specifies the EXTI line to check.
220 | * This parameter can be:
221 | * @arg EXTI_Linex: External interrupt line x where x(0..19)
222 | * @retval The new state of EXTI_Line (SET or RESET).
223 | */
224 | ITStatus EXTI_GetITStatus(uint32_t EXTI_Line)
225 | {
226 | ITStatus bitstatus = RESET;
227 | uint32_t enablestatus = 0;
228 | /* Check the parameters */
229 | assert_param(IS_GET_EXTI_LINE(EXTI_Line));
230 |
231 | enablestatus = EXTI->IMR & EXTI_Line;
232 | if (((EXTI->PR & EXTI_Line) != (uint32_t)RESET) && (enablestatus != (uint32_t)RESET))
233 | {
234 | bitstatus = SET;
235 | }
236 | else
237 | {
238 | bitstatus = RESET;
239 | }
240 | return bitstatus;
241 | }
242 |
243 | /**
244 | * @brief Clears the EXTI's line pending bits.
245 | * @param EXTI_Line: specifies the EXTI lines to clear.
246 | * This parameter can be any combination of EXTI_Linex where x can be (0..19).
247 | * @retval None
248 | */
249 | void EXTI_ClearITPendingBit(uint32_t EXTI_Line)
250 | {
251 | /* Check the parameters */
252 | assert_param(IS_EXTI_LINE(EXTI_Line));
253 |
254 | EXTI->PR = EXTI_Line;
255 | }
256 |
257 | /**
258 | * @}
259 | */
260 |
261 | /**
262 | * @}
263 | */
264 |
265 | /**
266 | * @}
267 | */
268 |
269 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
270 |
--------------------------------------------------------------------------------
/Libraries/stm_lib/src/stm32f10x_flash.c:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/Libraries/stm_lib/src/stm32f10x_flash.c
--------------------------------------------------------------------------------
/Libraries/stm_lib/src/stm32f10x_usart.c:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/Libraries/stm_lib/src/stm32f10x_usart.c
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_def.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_def.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Definitions related to USB Core
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_DEF_H
18 | #define __USB_DEF_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | typedef enum _RECIPIENT_TYPE
23 | {
24 | DEVICE_RECIPIENT, /* Recipient device */
25 | INTERFACE_RECIPIENT, /* Recipient interface */
26 | ENDPOINT_RECIPIENT, /* Recipient endpoint */
27 | OTHER_RECIPIENT
28 | } RECIPIENT_TYPE;
29 |
30 |
31 | typedef enum _STANDARD_REQUESTS
32 | {
33 | GET_STATUS = 0,
34 | CLEAR_FEATURE,
35 | RESERVED1,
36 | SET_FEATURE,
37 | RESERVED2,
38 | SET_ADDRESS,
39 | GET_DESCRIPTOR,
40 | SET_DESCRIPTOR,
41 | GET_CONFIGURATION,
42 | SET_CONFIGURATION,
43 | GET_INTERFACE,
44 | SET_INTERFACE,
45 | TOTAL_sREQUEST, /* Total number of Standard request */
46 | SYNCH_FRAME = 12
47 | } STANDARD_REQUESTS;
48 |
49 | /* Definition of "USBwValue" */
50 | typedef enum _DESCRIPTOR_TYPE
51 | {
52 | DEVICE_DESCRIPTOR = 1,
53 | CONFIG_DESCRIPTOR,
54 | STRING_DESCRIPTOR,
55 | INTERFACE_DESCRIPTOR,
56 | ENDPOINT_DESCRIPTOR
57 | } DESCRIPTOR_TYPE;
58 |
59 | /* Feature selector of a SET_FEATURE or CLEAR_FEATURE */
60 | typedef enum _FEATURE_SELECTOR
61 | {
62 | ENDPOINT_STALL,
63 | DEVICE_REMOTE_WAKEUP
64 | } FEATURE_SELECTOR;
65 |
66 | /* Exported constants --------------------------------------------------------*/
67 | /* Definition of "USBbmRequestType" */
68 | #define REQUEST_TYPE 0x60 /* Mask to get request type */
69 | #define STANDARD_REQUEST 0x00 /* Standard request */
70 | #define CLASS_REQUEST 0x20 /* Class request */
71 | #define VENDOR_REQUEST 0x40 /* Vendor request */
72 |
73 | #define RECIPIENT 0x1F /* Mask to get recipient */
74 |
75 | /* Exported macro ------------------------------------------------------------*/
76 | /* Exported functions ------------------------------------------------------- */
77 |
78 | #endif /* __USB_DEF_H */
79 |
80 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
81 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_init.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_init.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Initialization routines & global variables
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_INIT_H
18 | #define __USB_INIT_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | /* Exported constants --------------------------------------------------------*/
23 | /* Exported macro ------------------------------------------------------------*/
24 | /* Exported functions ------------------------------------------------------- */
25 | void USB_Init(void);
26 |
27 | /* External variables --------------------------------------------------------*/
28 | /* The number of current endpoint, it will be used to specify an endpoint */
29 | extern uint8_t EPindex;
30 | /* The number of current device, it is an index to the Device_Table */
31 | /*extern uint8_t Device_no; */
32 | /* Points to the DEVICE_INFO structure of current device */
33 | /* The purpose of this register is to speed up the execution */
34 | extern DEVICE_INFO* pInformation;
35 | /* Points to the DEVICE_PROP structure of current device */
36 | /* The purpose of this register is to speed up the execution */
37 | extern DEVICE_PROP* pProperty;
38 | /* Temporary save the state of Rx & Tx status. */
39 | /* Whenever the Rx or Tx state is changed, its value is saved */
40 | /* in this variable first and will be set to the EPRB or EPRA */
41 | /* at the end of interrupt process */
42 | extern USER_STANDARD_REQUESTS *pUser_Standard_Requests;
43 |
44 | extern uint16_t SaveState ;
45 | extern uint16_t wInterrupt_Mask;
46 |
47 | #endif /* __USB_INIT_H */
48 |
49 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
50 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_int.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_int.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Endpoint CTR (Low and High) interrupt's service routines
7 | * prototypes
8 | ********************************************************************************
9 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
10 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
11 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
12 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
13 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
14 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
15 | *******************************************************************************/
16 |
17 | /* Define to prevent recursive inclusion -------------------------------------*/
18 | #ifndef __USB_INT_H
19 | #define __USB_INT_H
20 |
21 | /* Includes ------------------------------------------------------------------*/
22 | /* Exported types ------------------------------------------------------------*/
23 | /* Exported constants --------------------------------------------------------*/
24 | /* Exported macro ------------------------------------------------------------*/
25 | /* Exported functions ------------------------------------------------------- */
26 | void CTR_LP(void);
27 | void CTR_HP(void);
28 |
29 | /* External variables --------------------------------------------------------*/
30 |
31 | #endif /* __USB_INT_H */
32 |
33 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
34 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_lib.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_lib.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : USB library include files
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_LIB_H
18 | #define __USB_LIB_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | #include "stm32f10x.h"
22 | #include "usb_type.h"
23 | #include "usb_regs.h"
24 | #include "usb_def.h"
25 | #include "usb_core.h"
26 | #include "usb_init.h"
27 | #ifndef STM32F10X_CL
28 | #include "usb_mem.h"
29 | #include "usb_int.h"
30 | #endif /* STM32F10X_CL */
31 |
32 | #include "usb_sil.h"
33 |
34 | #ifdef STM32F10X_CL
35 | #include "otgd_fs_cal.h"
36 | #include "otgd_fs_pcd.h"
37 | #include "otgd_fs_dev.h"
38 | #include "otgd_fs_int.h"
39 | #endif /* STM32F10X_CL */
40 |
41 |
42 | /* Exported types ------------------------------------------------------------*/
43 | /* Exported constants --------------------------------------------------------*/
44 | /* Exported macro ------------------------------------------------------------*/
45 | /* Exported functions ------------------------------------------------------- */
46 | /* External variables --------------------------------------------------------*/
47 |
48 | #endif /* __USB_LIB_H */
49 |
50 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
51 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_mem.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_mem.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Utility prototypes functions for memory/PMA transfers
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_MEM_H
18 | #define __USB_MEM_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | /* Exported constants --------------------------------------------------------*/
23 | /* Exported macro ------------------------------------------------------------*/
24 | /* Exported functions ------------------------------------------------------- */
25 | void UserToPMABufferCopy(uint8_t *pbUsrBuf, uint16_t wPMABufAddr, uint16_t wNBytes);
26 | void PMAToUserBufferCopy(uint8_t *pbUsrBuf, uint16_t wPMABufAddr, uint16_t wNBytes);
27 |
28 | /* External variables --------------------------------------------------------*/
29 |
30 | #endif /*__USB_MEM_H*/
31 |
32 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
33 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_sil.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_sil.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Simplified Interface Layer function prototypes.
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_SIL_H
18 | #define __USB_SIL_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | /* Exported constants --------------------------------------------------------*/
23 | /* Exported macro ------------------------------------------------------------*/
24 | /* Exported functions ------------------------------------------------------- */
25 |
26 | uint32_t USB_SIL_Init(void);
27 | uint32_t USB_SIL_Write(uint8_t bEpAddr, uint8_t* pBufferPointer, uint32_t wBufferSize);
28 | uint32_t USB_SIL_Read(uint8_t bEpAddr, uint8_t* pBufferPointer);
29 |
30 | /* External variables --------------------------------------------------------*/
31 |
32 | #endif /* __USB_SIL_H */
33 |
34 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
35 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/inc/usb_type.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_type.h
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Type definitions used by the USB Library
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_TYPE_H
18 | #define __USB_TYPE_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | #include "usb_conf.h"
22 |
23 | /* Exported types ------------------------------------------------------------*/
24 | /* Exported constants --------------------------------------------------------*/
25 | #ifndef NULL
26 | #define NULL ((void *)0)
27 | #endif
28 |
29 | typedef signed long s32;
30 | typedef signed short s16;
31 | typedef signed char s8;
32 |
33 | typedef volatile signed long vs32;
34 | typedef volatile signed short vs16;
35 | typedef volatile signed char vs8;
36 |
37 | typedef unsigned long u32;
38 | typedef unsigned short u16;
39 | typedef unsigned char u8;
40 |
41 | typedef unsigned long const uc32; /* Read Only */
42 | typedef unsigned short const uc16; /* Read Only */
43 | typedef unsigned char const uc8; /* Read Only */
44 |
45 | typedef volatile unsigned long vu32;
46 | typedef volatile unsigned short vu16;
47 | typedef volatile unsigned char vu8;
48 |
49 | typedef volatile unsigned long const vuc32; /* Read Only */
50 | typedef volatile unsigned short const vuc16; /* Read Only */
51 | typedef volatile unsigned char const vuc8; /* Read Only */
52 |
53 | #define FALSE 0
54 | #define TRUE 1
55 | typedef int bool;
56 |
57 | #ifndef __STM32F10x_H
58 | typedef enum { RESET = 0, SET = !RESET } FlagStatus, ITStatus;
59 |
60 | typedef enum { DISABLE = 0, ENABLE = !DISABLE} FunctionalState;
61 |
62 | typedef enum { ERROR = 0, SUCCESS = !ERROR} ErrorStatus;
63 | #endif
64 | /* Exported macro ------------------------------------------------------------*/
65 | /* Exported functions ------------------------------------------------------- */
66 | /* External variables --------------------------------------------------------*/
67 |
68 | #endif /* __USB_TYPE_H */
69 |
70 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
71 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/src/usb_init.c:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_init.c
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Initialization routines & global variables
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Includes ------------------------------------------------------------------*/
17 | #include "usb_lib.h"
18 |
19 | /* Private typedef -----------------------------------------------------------*/
20 | /* Private define ------------------------------------------------------------*/
21 | /* Private macro -------------------------------------------------------------*/
22 | /* Private variables ---------------------------------------------------------*/
23 | /* The number of current endpoint, it will be used to specify an endpoint */
24 | uint8_t EPindex;
25 | /* The number of current device, it is an index to the Device_Table */
26 | /* uint8_t Device_no; */
27 | /* Points to the DEVICE_INFO structure of current device */
28 | /* The purpose of this register is to speed up the execution */
29 | DEVICE_INFO *pInformation;
30 | /* Points to the DEVICE_PROP structure of current device */
31 | /* The purpose of this register is to speed up the execution */
32 | DEVICE_PROP *pProperty;
33 | /* Temporary save the state of Rx & Tx status. */
34 | /* Whenever the Rx or Tx state is changed, its value is saved */
35 | /* in this variable first and will be set to the EPRB or EPRA */
36 | /* at the end of interrupt process */
37 | uint16_t SaveState ;
38 | uint16_t wInterrupt_Mask;
39 | DEVICE_INFO Device_Info;
40 | USER_STANDARD_REQUESTS *pUser_Standard_Requests;
41 |
42 | /* Extern variables ----------------------------------------------------------*/
43 | /* Private function prototypes -----------------------------------------------*/
44 | /* Private functions ---------------------------------------------------------*/
45 |
46 | /*******************************************************************************
47 | * Function Name : USB_Init
48 | * Description : USB system initialization
49 | * Input : None.
50 | * Output : None.
51 | * Return : None.
52 | *******************************************************************************/
53 | void USB_Init(void)
54 | {
55 | pInformation = &Device_Info;
56 | pInformation->ControlState = 2;
57 | pProperty = &Device_Property;
58 | pUser_Standard_Requests = &User_Standard_Requests;
59 | /* Initialize devices one by one */
60 | pProperty->Init();
61 | }
62 |
63 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
64 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/src/usb_int.c:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_int.c
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Endpoint CTR (Low and High) interrupt's service routines
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 | #ifndef STM32F10X_CL
16 |
17 | /* Includes ------------------------------------------------------------------*/
18 | #include "usb_lib.h"
19 |
20 | /* Private typedef -----------------------------------------------------------*/
21 | /* Private define ------------------------------------------------------------*/
22 | /* Private macro -------------------------------------------------------------*/
23 | /* Private variables ---------------------------------------------------------*/
24 | __IO uint16_t SaveRState;
25 | __IO uint16_t SaveTState;
26 |
27 | /* Extern variables ----------------------------------------------------------*/
28 | extern void (*pEpInt_IN[7])(void); /* Handles IN interrupts */
29 | extern void (*pEpInt_OUT[7])(void); /* Handles OUT interrupts */
30 |
31 | /* Private function prototypes -----------------------------------------------*/
32 | /* Private functions ---------------------------------------------------------*/
33 |
34 | /*******************************************************************************
35 | * Function Name : CTR_LP.
36 | * Description : Low priority Endpoint Correct Transfer interrupt's service
37 | * routine.
38 | * Input : None.
39 | * Output : None.
40 | * Return : None.
41 | *******************************************************************************/
42 | void CTR_LP(void)
43 | {
44 | __IO uint16_t wEPVal = 0;
45 | /* stay in loop while pending ints */
46 | while (((wIstr = _GetISTR()) & ISTR_CTR) != 0)
47 | {
48 | /* extract highest priority endpoint number */
49 | EPindex = (uint8_t)(wIstr & ISTR_EP_ID);
50 | if (EPindex == 0)
51 | {
52 | /* Decode and service control endpoint interrupt */
53 | /* calling related service routine */
54 | /* (Setup0_Process, In0_Process, Out0_Process) */
55 |
56 | /* save RX & TX status */
57 | /* and set both to NAK */
58 |
59 |
60 | SaveRState = _GetENDPOINT(ENDP0);
61 | SaveTState = SaveRState & EPTX_STAT;
62 | SaveRState &= EPRX_STAT;
63 |
64 | _SetEPRxTxStatus(ENDP0,EP_RX_NAK,EP_TX_NAK);
65 |
66 | /* DIR bit = origin of the interrupt */
67 |
68 | if ((wIstr & ISTR_DIR) == 0)
69 | {
70 | /* DIR = 0 */
71 |
72 | /* DIR = 0 => IN int */
73 | /* DIR = 0 implies that (EP_CTR_TX = 1) always */
74 |
75 |
76 | _ClearEP_CTR_TX(ENDP0);
77 | In0_Process();
78 |
79 | /* before terminate set Tx & Rx status */
80 |
81 | _SetEPRxTxStatus(ENDP0,SaveRState,SaveTState);
82 | return;
83 | }
84 | else
85 | {
86 | /* DIR = 1 */
87 |
88 | /* DIR = 1 & CTR_RX => SETUP or OUT int */
89 | /* DIR = 1 & (CTR_TX | CTR_RX) => 2 int pending */
90 |
91 | wEPVal = _GetENDPOINT(ENDP0);
92 |
93 | if ((wEPVal &EP_SETUP) != 0)
94 | {
95 | _ClearEP_CTR_RX(ENDP0); /* SETUP bit kept frozen while CTR_RX = 1 */
96 | Setup0_Process();
97 | /* before terminate set Tx & Rx status */
98 |
99 | _SetEPRxTxStatus(ENDP0,SaveRState,SaveTState);
100 | return;
101 | }
102 |
103 | else if ((wEPVal & EP_CTR_RX) != 0)
104 | {
105 | _ClearEP_CTR_RX(ENDP0);
106 | Out0_Process();
107 | /* before terminate set Tx & Rx status */
108 |
109 | _SetEPRxTxStatus(ENDP0,SaveRState,SaveTState);
110 | return;
111 | }
112 | }
113 | }/* if(EPindex == 0) */
114 | else
115 | {
116 | /* Decode and service non control endpoints interrupt */
117 |
118 | /* process related endpoint register */
119 | wEPVal = _GetENDPOINT(EPindex);
120 | if ((wEPVal & EP_CTR_RX) != 0)
121 | {
122 | /* clear int flag */
123 | _ClearEP_CTR_RX(EPindex);
124 |
125 | /* call OUT service function */
126 | (*pEpInt_OUT[EPindex-1])();
127 |
128 | } /* if((wEPVal & EP_CTR_RX) */
129 |
130 | if ((wEPVal & EP_CTR_TX) != 0)
131 | {
132 | /* clear int flag */
133 | _ClearEP_CTR_TX(EPindex);
134 |
135 | /* call IN service function */
136 | (*pEpInt_IN[EPindex-1])();
137 | } /* if((wEPVal & EP_CTR_TX) != 0) */
138 |
139 | }/* if(EPindex == 0) else */
140 |
141 | }/* while(...) */
142 | }
143 |
144 | /*******************************************************************************
145 | * Function Name : CTR_HP.
146 | * Description : High Priority Endpoint Correct Transfer interrupt's service
147 | * routine.
148 | * Input : None.
149 | * Output : None.
150 | * Return : None.
151 | *******************************************************************************/
152 | void CTR_HP(void)
153 | {
154 | uint32_t wEPVal = 0;
155 |
156 | while (((wIstr = _GetISTR()) & ISTR_CTR) != 0)
157 | {
158 | _SetISTR((uint16_t)CLR_CTR); /* clear CTR flag */
159 | /* extract highest priority endpoint number */
160 | EPindex = (uint8_t)(wIstr & ISTR_EP_ID);
161 | /* process related endpoint register */
162 | wEPVal = _GetENDPOINT(EPindex);
163 | if ((wEPVal & EP_CTR_RX) != 0)
164 | {
165 | /* clear int flag */
166 | _ClearEP_CTR_RX(EPindex);
167 |
168 | /* call OUT service function */
169 | (*pEpInt_OUT[EPindex-1])();
170 |
171 | } /* if((wEPVal & EP_CTR_RX) */
172 | else if ((wEPVal & EP_CTR_TX) != 0)
173 | {
174 | /* clear int flag */
175 | _ClearEP_CTR_TX(EPindex);
176 |
177 | /* call IN service function */
178 | (*pEpInt_IN[EPindex-1])();
179 |
180 |
181 | } /* if((wEPVal & EP_CTR_TX) != 0) */
182 |
183 | }/* while(...) */
184 | }
185 |
186 | #endif /* STM32F10X_CL */
187 |
188 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
189 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/src/usb_mem.c:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_mem.c
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Utility functions for memory transfers to/from PMA
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 | #ifndef STM32F10X_CL
16 |
17 | /* Includes ------------------------------------------------------------------*/
18 | #include "usb_lib.h"
19 |
20 | /* Private typedef -----------------------------------------------------------*/
21 | /* Private define ------------------------------------------------------------*/
22 | /* Private macro -------------------------------------------------------------*/
23 | /* Private variables ---------------------------------------------------------*/
24 | /* Extern variables ----------------------------------------------------------*/
25 | /* Private function prototypes -----------------------------------------------*/
26 | /* Private functions ---------------------------------------------------------*/
27 | /*******************************************************************************
28 | * Function Name : UserToPMABufferCopy
29 | * Description : Copy a buffer from user memory area to packet memory area (PMA)
30 | * Input : - pbUsrBuf: pointer to user memory area.
31 | * - wPMABufAddr: address into PMA.
32 | * - wNBytes: no. of bytes to be copied.
33 | * Output : None.
34 | * Return : None .
35 | *******************************************************************************/
36 | void UserToPMABufferCopy(uint8_t *pbUsrBuf, uint16_t wPMABufAddr, uint16_t wNBytes)
37 | {
38 | uint32_t n = (wNBytes + 1) >> 1; /* n = (wNBytes + 1) / 2 */
39 | uint32_t i, temp1;
40 | uint16_t *pdwVal;
41 | pdwVal = (uint16_t *)(wPMABufAddr * 2 + PMAAddr);
42 | for (i = n; i != 0; i--)
43 | {
44 | temp1 = (uint16_t) * pbUsrBuf;
45 | pbUsrBuf++;
46 | *pdwVal++ = temp1 | (uint16_t) * pbUsrBuf << 8;
47 | pdwVal++;
48 | pbUsrBuf++;
49 | }
50 | }
51 | /*******************************************************************************
52 | * Function Name : PMAToUserBufferCopy
53 | * Description : Copy a buffer from user memory area to packet memory area (PMA)
54 | * Input : - pbUsrBuf = pointer to user memory area.
55 | * - wPMABufAddr = address into PMA.
56 | * - wNBytes = no. of bytes to be copied.
57 | * Output : None.
58 | * Return : None.
59 | *******************************************************************************/
60 | void PMAToUserBufferCopy(uint8_t *pbUsrBuf, uint16_t wPMABufAddr, uint16_t wNBytes)
61 | {
62 | uint32_t n = (wNBytes + 1) >> 1;/* /2*/
63 | uint32_t i;
64 | uint32_t *pdwVal;
65 | pdwVal = (uint32_t *)(wPMABufAddr * 2 + PMAAddr);
66 | for (i = n; i != 0; i--)
67 | {
68 | *(uint16_t*)pbUsrBuf++ = *pdwVal++;
69 | pbUsrBuf++;
70 | }
71 | }
72 |
73 | #endif /* STM32F10X_CL */
74 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
75 |
--------------------------------------------------------------------------------
/Libraries/stm_usb_fs_lib/src/usb_sil.c:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2010 STMicroelectronics ********************
2 | * File Name : usb_sil.c
3 | * Author : MCD Application Team
4 | * Version : V3.2.1
5 | * Date : 07/05/2010
6 | * Description : Simplified Interface Layer for Global Initialization and
7 | * Endpoint Rea/Write operations.
8 | ********************************************************************************
9 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
10 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
11 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
12 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
13 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
14 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
15 | *******************************************************************************/
16 |
17 | /* Includes ------------------------------------------------------------------*/
18 | #include "usb_lib.h"
19 |
20 | /* Private typedef -----------------------------------------------------------*/
21 | /* Private define ------------------------------------------------------------*/
22 | /* Private macro -------------------------------------------------------------*/
23 | /* Private variables ---------------------------------------------------------*/
24 | /* Extern variables ----------------------------------------------------------*/
25 | /* Private function prototypes -----------------------------------------------*/
26 | /* Private functions ---------------------------------------------------------*/
27 |
28 | /*******************************************************************************
29 | * Function Name : USB_SIL_Init
30 | * Description : Initialize the USB Device IP and the Endpoint 0.
31 | * Input : None.
32 | * Output : None.
33 | * Return : Status.
34 | *******************************************************************************/
35 | uint32_t USB_SIL_Init(void)
36 | {
37 | #ifndef STM32F10X_CL
38 |
39 | /* USB interrupts initialization */
40 | /* clear pending interrupts */
41 | _SetISTR(0);
42 | wInterrupt_Mask = IMR_MSK;
43 | /* set interrupts mask */
44 | _SetCNTR(wInterrupt_Mask);
45 |
46 | #else
47 |
48 | /* Perform OTG Device initialization procedure (including EP0 init) */
49 | OTG_DEV_Init();
50 |
51 | #endif /* STM32F10X_CL */
52 |
53 | return 0;
54 | }
55 |
56 | /*******************************************************************************
57 | * Function Name : USB_SIL_Write
58 | * Description : Write a buffer of data to a selected endpoint.
59 | * Input : - bEpAddr: The address of the non control endpoint.
60 | * - pBufferPointer: The pointer to the buffer of data to be written
61 | * to the endpoint.
62 | * - wBufferSize: Number of data to be written (in bytes).
63 | * Output : None.
64 | * Return : Status.
65 | *******************************************************************************/
66 | uint32_t USB_SIL_Write(uint8_t bEpAddr, uint8_t* pBufferPointer, uint32_t wBufferSize)
67 | {
68 | #ifndef STM32F10X_CL
69 |
70 | /* Use the memory interface function to write to the selected endpoint */
71 | UserToPMABufferCopy(pBufferPointer, GetEPTxAddr(bEpAddr & 0x7F), wBufferSize);
72 |
73 | /* Update the data length in the control register */
74 | SetEPTxCount((bEpAddr & 0x7F), wBufferSize);
75 |
76 | #else
77 |
78 | /* Use the PCD interface layer function to write to the selected endpoint */
79 | PCD_EP_Write (bEpAddr, pBufferPointer, wBufferSize);
80 |
81 | #endif /* STM32F10X_CL */
82 |
83 | return 0;
84 | }
85 |
86 | /*******************************************************************************
87 | * Function Name : USB_SIL_Read
88 | * Description : Write a buffer of data to a selected endpoint.
89 | * Input : - bEpAddr: The address of the non control endpoint.
90 | * - pBufferPointer: The pointer to which will be saved the
91 | * received data buffer.
92 | * Output : None.
93 | * Return : Number of received data (in Bytes).
94 | *******************************************************************************/
95 | uint32_t USB_SIL_Read(uint8_t bEpAddr, uint8_t* pBufferPointer)
96 | {
97 | uint32_t DataLength = 0;
98 |
99 | #ifndef STM32F10X_CL
100 |
101 | /* Get the number of received data on the selected Endpoint */
102 | DataLength = GetEPRxCount(bEpAddr & 0x7F);
103 |
104 | /* Use the memory interface function to write to the selected endpoint */
105 | PMAToUserBufferCopy(pBufferPointer, GetEPRxAddr(bEpAddr & 0x7F), DataLength);
106 |
107 | #else
108 |
109 | USB_OTG_EP *ep;
110 |
111 | /* Get the structure pointer of the selected Endpoint */
112 | ep = PCD_GetOutEP(bEpAddr);
113 |
114 | /* Get the number of received data */
115 | DataLength = ep->xfer_len;
116 |
117 | /* Use the PCD interface layer function to read the selected endpoint */
118 | PCD_EP_Read (bEpAddr, pBufferPointer, DataLength);
119 |
120 | #endif /* STM32F10X_CL */
121 |
122 | /* Return the number of received data */
123 | return DataLength;
124 | }
125 |
126 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
127 |
--------------------------------------------------------------------------------
/Libraries/usb/CVS/Entries:
--------------------------------------------------------------------------------
1 | /usb_pwr.h/1.1/Sat Mar 19 10:14:24 2011//
2 | /usb_prop.h/1.1/Sat Mar 19 10:14:24 2011//
3 | /usb_istr.h/1.1/Sat Mar 19 10:14:24 2011//
4 | /usb_desc.h/1.1/Fri Mar 30 21:03:34 2012//
5 | /usb_conf.h/1.1/Sat Mar 19 10:14:24 2011//
6 | /stm32f10x_it.h/1.1/Sat Mar 19 10:14:24 2011//
7 | /platform_config.h/1.1/Tue Mar 1 04:44:10 2016//
8 | /hw_config.h/1.1/Wed Jun 1 01:57:17 2016//
9 | /usb_pwr.c/1.1/Sat Mar 19 10:14:26 2011//
10 | /usb_desc.c/1.1/Wed Jun 1 01:53:39 2016//
11 | /hw_config.c/1.1/Sat Nov 19 06:07:40 2016//
12 | /usb_istr.c/1.1/Wed Nov 16 07:23:56 2016//
13 | /usb_endp.c/1.3/Mon Nov 21 06:19:40 2016//
14 | /usb_prop.c/1.1/Mon Nov 21 07:52:24 2016//
15 | D
16 |
--------------------------------------------------------------------------------
/Libraries/usb/CVS/Entries.Extra:
--------------------------------------------------------------------------------
1 | /usb_pwr.h///1468199674/
2 | /usb_prop.h///1468199675/
3 | /usb_istr.h///1468199675/
4 | /usb_desc.h///1468199675/
5 | /usb_conf.h///1468199675/
6 | /stm32f10x_it.h///1468199675/
7 | /platform_config.h///1468199675/
8 | /hw_config.h///1468199675/
9 | /usb_pwr.c///1468199675/
10 | /usb_desc.c///1468199675/
11 | /hw_config.c///1468199675/
12 | /usb_istr.c///1468199675/
13 | /usb_endp.c///1471019589/
14 | /usb_prop.c///1468199675/
15 |
--------------------------------------------------------------------------------
/Libraries/usb/CVS/Entries.Extra.Old:
--------------------------------------------------------------------------------
1 | /usb_pwr.h///1468199674/
2 | /usb_prop.h///1468199675/
3 | /usb_istr.h///1468199675/
4 | /usb_desc.h///1468199675/
5 | /usb_conf.h///1468199675/
6 | /stm32f10x_it.h///1468199675/
7 | /platform_config.h///1468199675/
8 | /hw_config.h///1468199675/
9 | /usb_pwr.c///1468199675/
10 | /usb_prop.c///1468199675/
11 | /usb_desc.c///1468199675/
12 | /hw_config.c///1468199675/
13 | /usb_istr.c///1468199675/
14 | /usb_endp.c///1471019589/
15 |
--------------------------------------------------------------------------------
/Libraries/usb/CVS/Entries.Old:
--------------------------------------------------------------------------------
1 | /usb_pwr.h/1.1/Sat Mar 19 10:14:24 2011//
2 | /usb_prop.h/1.1/Sat Mar 19 10:14:24 2011//
3 | /usb_istr.h/1.1/Sat Mar 19 10:14:24 2011//
4 | /usb_desc.h/1.1/Fri Mar 30 21:03:34 2012//
5 | /usb_conf.h/1.1/Sat Mar 19 10:14:24 2011//
6 | /stm32f10x_it.h/1.1/Sat Mar 19 10:14:24 2011//
7 | /platform_config.h/1.1/Tue Mar 1 04:44:10 2016//
8 | /hw_config.h/1.1/Wed Jun 1 01:57:17 2016//
9 | /usb_pwr.c/1.1/Sat Mar 19 10:14:26 2011//
10 | /usb_prop.c/1.1/Sat Mar 31 16:25:44 2012//
11 | /usb_desc.c/1.1/Wed Jun 1 01:53:39 2016//
12 | /hw_config.c/1.1/Sat Nov 19 06:07:40 2016//
13 | /usb_istr.c/1.1/Wed Nov 16 07:23:56 2016//
14 | /usb_endp.c/1.3/Mon Nov 21 06:19:40 2016//
15 | D
16 |
--------------------------------------------------------------------------------
/Libraries/usb/CVS/Repository:
--------------------------------------------------------------------------------
1 | Code/grbl1.0d/stm32grbl/usb
2 |
--------------------------------------------------------------------------------
/Libraries/usb/CVS/Root:
--------------------------------------------------------------------------------
1 | :local:E:/CVSRep
2 |
--------------------------------------------------------------------------------
/Libraries/usb/hw_config.c:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : hw_config.c
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Hardware Configuration & Setup
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | #include "stm32f10x_it.h"
17 |
18 | #include "usb_lib.h"
19 | #include "usb_prop.h"
20 | #include "usb_desc.h"
21 | #include "hw_config.h"
22 | #include "platform_config.h"
23 | #include "usb_pwr.h"
24 | #include "stm32f10x_rcc.h"
25 | #include "misc.h"
26 |
27 | ErrorStatus HSEStartUpStatus;
28 |
29 | static void IntToUnicode(uint32_t value, uint8_t *pbuf, uint8_t len);
30 |
31 | /*******************************************************************************
32 | * Description : Configures Main system clocks & power
33 | *******************************************************************************/
34 | void Set_System(void)
35 | {
36 | }
37 |
38 | /*******************************************************************************
39 | * Description : Configures USB Clock input (48MHz)
40 | *******************************************************************************/
41 | void Set_USBClock(void)
42 | {
43 | /* Select USBCLK source */
44 | RCC_USBCLKConfig(RCC_USBCLKSource_PLLCLK_1Div5);
45 |
46 | /* Enable the USB clock */
47 | RCC_APB1PeriphClockCmd(RCC_APB1Periph_USB, ENABLE);
48 | }
49 |
50 | /*******************************************************************************
51 | * Description : Power-off system clocks and power while entering suspend mode
52 | *******************************************************************************/
53 | void Enter_LowPowerMode(void)
54 | {
55 | /* Set the device state to suspend */
56 | bDeviceState = SUSPENDED;
57 | }
58 |
59 | /*******************************************************************************
60 | * Description : Restores system clocks and power while exiting suspend mode
61 | *******************************************************************************/
62 | void Leave_LowPowerMode(void)
63 | {
64 | DEVICE_INFO *pInfo = &Device_Info;
65 |
66 | /* Set the device state to the correct state */
67 | if (pInfo->Current_Configuration != 0)
68 | {
69 | /* Device configured */
70 | bDeviceState = CONFIGURED;
71 | }
72 | else
73 | {
74 | bDeviceState = ATTACHED;
75 | }
76 | }
77 |
78 | /*******************************************************************************
79 | * Description : Configures the USB interrupts
80 | *******************************************************************************/
81 | void USB_Interrupts_Config(void)
82 | {
83 | NVIC_InitTypeDef NVIC_InitStructure;
84 |
85 | NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
86 |
87 | NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
88 | NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
89 | NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
90 | NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
91 | NVIC_Init(&NVIC_InitStructure);
92 | }
93 |
94 | /*******************************************************************************
95 | * Description : Software Connection/Disconnection of USB Cable
96 | *******************************************************************************/
97 | void USB_Cable_Config(FunctionalState NewState)
98 | {
99 | }
100 |
101 | /*******************************************************************************
102 | * Description : Create the serial number string descriptor.
103 | *******************************************************************************/
104 | void Get_SerialNum(void)
105 | {
106 | uint32_t Device_Serial0, Device_Serial1, Device_Serial2;
107 |
108 | Device_Serial0 = *(__IO uint32_t*) (0x1FFFF7E8);
109 | Device_Serial1 = *(__IO uint32_t*) (0x1FFFF7EC);
110 | Device_Serial2 = *(__IO uint32_t*) (0x1FFFF7F0);
111 |
112 | Device_Serial0 += Device_Serial2;
113 |
114 | if (Device_Serial0 != 0)
115 | {
116 | IntToUnicode(Device_Serial0, &Virtual_Com_Port_StringSerial[2], 8);
117 | IntToUnicode(Device_Serial1, &Virtual_Com_Port_StringSerial[18], 4);
118 | }
119 | }
120 |
121 | /*******************************************************************************
122 | * Description : Convert Hex 32Bits value into char.
123 | *******************************************************************************/
124 | static void IntToUnicode(uint32_t value, uint8_t *pbuf, uint8_t len)
125 | {
126 | uint8_t idx = 0;
127 |
128 | for (idx = 0; idx < len; idx++)
129 | {
130 | if (((value >> 28)) < 0xA)
131 | {
132 | pbuf[2 * idx] = (value >> 28) + '0';
133 | }
134 | else
135 | {
136 | pbuf[2 * idx] = (value >> 28) + 'A' - 10;
137 | }
138 |
139 | value = value << 4;
140 |
141 | pbuf[2 * idx + 1] = 0;
142 | }
143 | }
144 |
--------------------------------------------------------------------------------
/Libraries/usb/hw_config.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : hw_config.h
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Hardware Configuration & Setup
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __HW_CONFIG_H
18 | #define __HW_CONFIG_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | #include "usb_type.h"
22 |
23 | /* Exported types ------------------------------------------------------------*/
24 | /* Exported constants --------------------------------------------------------*/
25 | /* Exported macro ------------------------------------------------------------*/
26 | /* Exported define -----------------------------------------------------------*/
27 | #define MASS_MEMORY_START 0x04002000
28 | #define BULK_MAX_PACKET_SIZE 0x00000040
29 | #define LED_ON 0xF0
30 | #define LED_OFF 0xFF
31 |
32 | #define USART_RX_DATA_SIZE (64)
33 | /* Exported functions ------------------------------------------------------- */
34 | void Set_System(void);
35 | void Set_USBClock(void);
36 | void Enter_LowPowerMode(void);
37 | void Leave_LowPowerMode(void);
38 | void USB_Interrupts_Config(void);
39 | void USB_Cable_Config(FunctionalState NewState);
40 | void USART_Config_Default(void);
41 | bool USART_Config(void);
42 | void OnUsbDataRx(uint8_t* data_buffer, uint8_t Nb_bytes);
43 | void Get_SerialNum(void);
44 |
45 | /* External variables --------------------------------------------------------*/
46 |
47 | #endif /*__HW_CONFIG_H*/
48 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
49 |
--------------------------------------------------------------------------------
/Libraries/usb/platform_config.h:
--------------------------------------------------------------------------------
1 | #ifndef __PLATFORM_CONFIG_H
2 | #define __PLATFORM_CONFIG_H
3 |
4 | #include "stm32f10x.h"
5 |
6 | #endif /* __PLATFORM_CONFIG_H */
7 |
8 |
--------------------------------------------------------------------------------
/Libraries/usb/stm32f10x_it.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : stm32f10x_it.h
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : This file contains the headers of the interrupt handlers.
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __STM32F10x_IT_H
18 | #define __STM32F10x_IT_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | #include "stm32f10x.h"
22 |
23 | /* Exported types ------------------------------------------------------------*/
24 | /* Exported constants --------------------------------------------------------*/
25 | /* Exported macro ------------------------------------------------------------*/
26 | /* Exported functions ------------------------------------------------------- */
27 |
28 | void NMI_Handler(void);
29 | void HardFault_Handler(void);
30 | void MemManage_Handler(void);
31 | void BusFault_Handler(void);
32 | void UsageFault_Handler(void);
33 | void SVC_Handler(void);
34 | void DebugMon_Handler(void);
35 | void PendSV_Handler(void);
36 | void SysTick_Handler(void);
37 |
38 | #ifndef STM32F10X_CL
39 | void USB_LP_CAN1_RX0_IRQHandler(void);
40 | #endif /* STM32F10X_CL */
41 |
42 | #if defined (USE_STM3210B_EVAL) || defined (USE_STM3210E_EVAL)
43 | void USART1_IRQHandler(void);
44 | #endif /* USE_STM3210B_EVAL or USE_STM3210E_EVAL */
45 |
46 | #ifdef USE_STM3210C_EVAL
47 | void USART2_IRQHandler(void);
48 | #endif /* USE_STM3210C_EVAL */
49 |
50 | #ifdef STM32F10X_CL
51 | void OTG_FS_IRQHandler(void);
52 | #endif /* STM32F10X_CL */
53 |
54 | #endif /* __STM32F10x_IT_H */
55 |
56 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
57 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_desc.c:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file usb_desc.c
4 | * @author MCD Application Team
5 | * @version V4.0.0
6 | * @date 21-January-2013
7 | * @brief Descriptors for Virtual Com Port Demo
8 | ******************************************************************************
9 | * @attention
10 | *
11 | * © COPYRIGHT 2013 STMicroelectronics
12 | *
13 | * Licensed under MCD-ST Liberty SW License Agreement V2, (the "License");
14 | * You may not use this file except in compliance with the License.
15 | * You may obtain a copy of the License at:
16 | *
17 | * http://www.st.com/software_license_agreement_liberty_v2
18 | *
19 | * Unless required by applicable law or agreed to in writing, software
20 | * distributed under the License is distributed on an "AS IS" BASIS,
21 | * WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
22 | * See the License for the specific language governing permissions and
23 | * limitations under the License.
24 | *
25 | ******************************************************************************
26 | */
27 |
28 |
29 | /* Includes ------------------------------------------------------------------*/
30 | #include "usb_lib.h"
31 | #include "usb_desc.h"
32 |
33 | /* USB Standard Device Descriptor */
34 | const uint8_t Virtual_Com_Port_DeviceDescriptor[] =
35 | {
36 | 0x12, /* bLength */
37 | USB_DEVICE_DESCRIPTOR_TYPE, /* bDescriptorType */
38 | 0x00,
39 | 0x02, /* bcdUSB = 2.00 */
40 | 0x02, /* bDeviceClass: CDC */
41 | 0x00, /* bDeviceSubClass */
42 | 0x00, /* bDeviceProtocol */
43 | 0x40, /* bMaxPacketSize0 */
44 | 0x83,
45 | 0x04, /* idVendor = 0x0483 */
46 | 0x40,
47 | 0x57, /* idProduct = 0x7540 */
48 | 0x00,
49 | 0x02, /* bcdDevice = 2.00 */
50 | 1, /* Index of string descriptor describing manufacturer */
51 | 2, /* Index of string descriptor describing product */
52 | 3, /* Index of string descriptor describing the device's serial number */
53 | 0x01 /* bNumConfigurations */
54 | };
55 |
56 | const uint8_t Virtual_Com_Port_ConfigDescriptor[] =
57 | {
58 | /*Configuration Descriptor*/
59 | 0x09, /* bLength: Configuration Descriptor size */
60 | USB_CONFIGURATION_DESCRIPTOR_TYPE, /* bDescriptorType: Configuration */
61 | VIRTUAL_COM_PORT_SIZ_CONFIG_DESC, /* wTotalLength:no of returned bytes */
62 | 0x00,
63 | 0x02, /* bNumInterfaces: 2 interface */
64 | 0x01, /* bConfigurationValue: Configuration value */
65 | 0x00, /* iConfiguration: Index of string descriptor describing the configuration */
66 | 0xC0, /* bmAttributes: self powered */
67 | 0x32, /* MaxPower 0 mA */
68 | /*Interface Descriptor*/
69 | 0x09, /* bLength: Interface Descriptor size */
70 | USB_INTERFACE_DESCRIPTOR_TYPE, /* bDescriptorType: Interface */
71 | /* Interface descriptor type */
72 | 0x00, /* bInterfaceNumber: Number of Interface */
73 | 0x00, /* bAlternateSetting: Alternate setting */
74 | 0x01, /* bNumEndpoints: One endpoints used */
75 | 0x02, /* bInterfaceClass: Communication Interface Class */
76 | 0x02, /* bInterfaceSubClass: Abstract Control Model */
77 | 0x01, /* bInterfaceProtocol: Common AT commands */
78 | 0x00, /* iInterface: */
79 | /*Header Functional Descriptor*/
80 | 0x05, /* bLength: Endpoint Descriptor size */
81 | 0x24, /* bDescriptorType: CS_INTERFACE */
82 | 0x00, /* bDescriptorSubtype: Header Func Desc */
83 | 0x10, /* bcdCDC: spec release number */
84 | 0x01,
85 | /*Call Management Functional Descriptor*/
86 | 0x05, /* bFunctionLength */
87 | 0x24, /* bDescriptorType: CS_INTERFACE */
88 | 0x01, /* bDescriptorSubtype: Call Management Func Desc */
89 | 0x00, /* bmCapabilities: D0+D1 */
90 | 0x01, /* bDataInterface: 1 */
91 | /*ACM Functional Descriptor*/
92 | 0x04, /* bFunctionLength */
93 | 0x24, /* bDescriptorType: CS_INTERFACE */
94 | 0x02, /* bDescriptorSubtype: Abstract Control Management desc */
95 | 0x02, /* bmCapabilities */
96 | /*Union Functional Descriptor*/
97 | 0x05, /* bFunctionLength */
98 | 0x24, /* bDescriptorType: CS_INTERFACE */
99 | 0x06, /* bDescriptorSubtype: Union func desc */
100 | 0x00, /* bMasterInterface: Communication class interface */
101 | 0x01, /* bSlaveInterface0: Data Class Interface */
102 | /*Endpoint 2 Descriptor*/
103 | 0x07, /* bLength: Endpoint Descriptor size */
104 | USB_ENDPOINT_DESCRIPTOR_TYPE, /* bDescriptorType: Endpoint */
105 | 0x82, /* bEndpointAddress: (IN2) */
106 | 0x03, /* bmAttributes: Interrupt */
107 | VIRTUAL_COM_PORT_INT_SIZE, /* wMaxPacketSize: */
108 | 0x00,
109 | 0xFF, /* bInterval: */
110 | /*Data class interface descriptor*/
111 | 0x09, /* bLength: Endpoint Descriptor size */
112 | USB_INTERFACE_DESCRIPTOR_TYPE, /* bDescriptorType: */
113 | 0x01, /* bInterfaceNumber: Number of Interface */
114 | 0x00, /* bAlternateSetting: Alternate setting */
115 | 0x02, /* bNumEndpoints: Two endpoints used */
116 | 0x0A, /* bInterfaceClass: CDC */
117 | 0x00, /* bInterfaceSubClass: */
118 | 0x00, /* bInterfaceProtocol: */
119 | 0x00, /* iInterface: */
120 | /*Endpoint 3 Descriptor*/
121 | 0x07, /* bLength: Endpoint Descriptor size */
122 | USB_ENDPOINT_DESCRIPTOR_TYPE, /* bDescriptorType: Endpoint */
123 | 0x03, /* bEndpointAddress: (OUT3) */
124 | 0x02, /* bmAttributes: Bulk */
125 | VIRTUAL_COM_PORT_DATA_SIZE, /* wMaxPacketSize: */
126 | 0x00,
127 | 0x00, /* bInterval: ignore for Bulk transfer */
128 | /*Endpoint 1 Descriptor*/
129 | 0x07, /* bLength: Endpoint Descriptor size */
130 | USB_ENDPOINT_DESCRIPTOR_TYPE, /* bDescriptorType: Endpoint */
131 | 0x81, /* bEndpointAddress: (IN1) */
132 | 0x02, /* bmAttributes: Bulk */
133 | VIRTUAL_COM_PORT_DATA_SIZE, /* wMaxPacketSize: */
134 | 0x00,
135 | 0x00 /* bInterval */
136 | };
137 |
138 | /* USB String Descriptors */
139 | const uint8_t Virtual_Com_Port_StringLangID[VIRTUAL_COM_PORT_SIZ_STRING_LANGID] =
140 | {
141 | VIRTUAL_COM_PORT_SIZ_STRING_LANGID,
142 | USB_STRING_DESCRIPTOR_TYPE,
143 | 0x09,
144 | 0x04 /* LangID = 0x0409: U.S. English */
145 | };
146 |
147 | const uint8_t Virtual_Com_Port_StringVendor[VIRTUAL_COM_PORT_SIZ_STRING_VENDOR] =
148 | {
149 | VIRTUAL_COM_PORT_SIZ_STRING_VENDOR, /* Size of Vendor string */
150 | USB_STRING_DESCRIPTOR_TYPE, /* bDescriptorType*/
151 | /* Manufacturer: "tomeko.net" */
152 | 't', 0, 'o', 0, 'm', 0, 'e', 0, 'k', 0, 'o', 0, ' ', 0, 'n', 0,
153 | 'e', 0, 't', 0
154 | };
155 |
156 | const uint8_t Virtual_Com_Port_StringProduct[VIRTUAL_COM_PORT_SIZ_STRING_PRODUCT] =
157 | {
158 | VIRTUAL_COM_PORT_SIZ_STRING_PRODUCT, /* bLength */
159 | USB_STRING_DESCRIPTOR_TYPE, /* bDescriptorType */
160 | /* Product name: "STM32F103C8T6" */
161 | 'S', 0, 'T', 0, 'M', 0, '3', 0, '2', 0, 'F', 0, '1', 0, '0', 0,
162 | '3', 0, 'C', 0, '8', 0, 'T', 0, '6', 0
163 | };
164 |
165 | uint8_t Virtual_Com_Port_StringSerial[VIRTUAL_COM_PORT_SIZ_STRING_SERIAL] =
166 | {
167 | VIRTUAL_COM_PORT_SIZ_STRING_SERIAL, /* bLength */
168 | USB_STRING_DESCRIPTOR_TYPE, /* bDescriptorType */
169 | 'S', 0, 'T', 0, 'M', 0, '3', 0, '2', 0
170 | };
171 |
172 | /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
173 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_desc.c.bak:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_desc.c
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Descriptors for Virtual Com Port Demo
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Includes ------------------------------------------------------------------*/
17 | #include "usb_lib.h"
18 | #include "usb_desc.h"
19 |
20 | /* USB Standard Device Descriptor */
21 | const uint8_t Virtual_Com_Port_DeviceDescriptor[] =
22 | {
23 | 0x12, /* bLength */
24 | USB_DEVICE_DESCRIPTOR_TYPE, /* bDescriptorType */
25 | 0x00,
26 | 0x02, /* bcdUSB = 2.00 */
27 | 0x02, /* bDeviceClass: CDC */
28 | 0x00, /* bDeviceSubClass */
29 | 0x00, /* bDeviceProtocol */
30 | 0x40, /* bMaxPacketSize0 */
31 | 0x83,
32 | 0x04, /* idVendor = 0x0483 */
33 | 0x40,
34 | 0x57, /* idProduct = 0x7540 */
35 | 0x00,
36 | 0x02, /* bcdDevice = 2.00 */
37 | 1, /* Index of string descriptor describing manufacturer */
38 | 2, /* Index of string descriptor describing product */
39 | 3, /* Index of string descriptor describing the device's serial number */
40 | 0x01 /* bNumConfigurations */
41 | };
42 |
43 | const uint8_t Virtual_Com_Port_ConfigDescriptor[] =
44 | {
45 | /*Configuration Descriptor*/
46 | 0x09, /* bLength: Configuration Descriptor size */
47 | USB_CONFIGURATION_DESCRIPTOR_TYPE, /* bDescriptorType: Configuration */
48 | VIRTUAL_COM_PORT_SIZ_CONFIG_DESC, /* wTotalLength:no of returned bytes */
49 | 0x00,
50 | 0x02, /* bNumInterfaces: 2 interface */
51 | 0x01, /* bConfigurationValue: Configuration value */
52 | 0x00, /* iConfiguration: Index of string descriptor describing the configuration */
53 | 0xC0, /* bmAttributes: self powered */
54 | 0x32, /* MaxPower 0 mA */
55 | /*Interface Descriptor*/
56 | 0x09, /* bLength: Interface Descriptor size */
57 | USB_INTERFACE_DESCRIPTOR_TYPE, /* bDescriptorType: Interface */
58 | /* Interface descriptor type */
59 | 0x00, /* bInterfaceNumber: Number of Interface */
60 | 0x00, /* bAlternateSetting: Alternate setting */
61 | 0x01, /* bNumEndpoints: One endpoints used */
62 | 0x02, /* bInterfaceClass: Communication Interface Class */
63 | 0x02, /* bInterfaceSubClass: Abstract Control Model */
64 | 0x01, /* bInterfaceProtocol: Common AT commands */
65 | 0x00, /* iInterface: */
66 | /*Header Functional Descriptor*/
67 | 0x05, /* bLength: Endpoint Descriptor size */
68 | 0x24, /* bDescriptorType: CS_INTERFACE */
69 | 0x00, /* bDescriptorSubtype: Header Func Desc */
70 | 0x10, /* bcdCDC: spec release number */
71 | 0x01,
72 | /*Call Management Functional Descriptor*/
73 | 0x05, /* bFunctionLength */
74 | 0x24, /* bDescriptorType: CS_INTERFACE */
75 | 0x01, /* bDescriptorSubtype: Call Management Func Desc */
76 | 0x00, /* bmCapabilities: D0+D1 */
77 | 0x01, /* bDataInterface: 1 */
78 | /*ACM Functional Descriptor*/
79 | 0x04, /* bFunctionLength */
80 | 0x24, /* bDescriptorType: CS_INTERFACE */
81 | 0x02, /* bDescriptorSubtype: Abstract Control Management desc */
82 | 0x02, /* bmCapabilities */
83 | /*Union Functional Descriptor*/
84 | 0x05, /* bFunctionLength */
85 | 0x24, /* bDescriptorType: CS_INTERFACE */
86 | 0x06, /* bDescriptorSubtype: Union func desc */
87 | 0x00, /* bMasterInterface: Communication class interface */
88 | 0x01, /* bSlaveInterface0: Data Class Interface */
89 | /*Endpoint 2 Descriptor*/
90 | 0x07, /* bLength: Endpoint Descriptor size */
91 | USB_ENDPOINT_DESCRIPTOR_TYPE, /* bDescriptorType: Endpoint */
92 | 0x82, /* bEndpointAddress: (IN2) */
93 | 0x03, /* bmAttributes: Interrupt */
94 | VIRTUAL_COM_PORT_INT_SIZE, /* wMaxPacketSize: */
95 | 0x00,
96 | 0xFF, /* bInterval: */
97 | /*Data class interface descriptor*/
98 | 0x09, /* bLength: Endpoint Descriptor size */
99 | USB_INTERFACE_DESCRIPTOR_TYPE, /* bDescriptorType: */
100 | 0x01, /* bInterfaceNumber: Number of Interface */
101 | 0x00, /* bAlternateSetting: Alternate setting */
102 | 0x02, /* bNumEndpoints: Two endpoints used */
103 | 0x0A, /* bInterfaceClass: CDC */
104 | 0x00, /* bInterfaceSubClass: */
105 | 0x00, /* bInterfaceProtocol: */
106 | 0x00, /* iInterface: */
107 | /*Endpoint 3 Descriptor*/
108 | 0x07, /* bLength: Endpoint Descriptor size */
109 | USB_ENDPOINT_DESCRIPTOR_TYPE, /* bDescriptorType: Endpoint */
110 | 0x03, /* bEndpointAddress: (OUT3) */
111 | 0x02, /* bmAttributes: Bulk */
112 | VIRTUAL_COM_PORT_DATA_SIZE, /* wMaxPacketSize: */
113 | 0x00,
114 | 0x00, /* bInterval: ignore for Bulk transfer */
115 | /*Endpoint 1 Descriptor*/
116 | 0x07, /* bLength: Endpoint Descriptor size */
117 | USB_ENDPOINT_DESCRIPTOR_TYPE, /* bDescriptorType: Endpoint */
118 | 0x81, /* bEndpointAddress: (IN1) */
119 | 0x02, /* bmAttributes: Bulk */
120 | VIRTUAL_COM_PORT_DATA_SIZE, /* wMaxPacketSize: */
121 | 0x00,
122 | 0x00 /* bInterval */
123 | };
124 |
125 | /* USB String Descriptors */
126 | const uint8_t Virtual_Com_Port_StringLangID[VIRTUAL_COM_PORT_SIZ_STRING_LANGID] =
127 | {
128 | VIRTUAL_COM_PORT_SIZ_STRING_LANGID,
129 | USB_STRING_DESCRIPTOR_TYPE,
130 | 0x09,
131 | 0x04 /* LangID = 0x0409: U.S. English */
132 | };
133 |
134 | const uint8_t Virtual_Com_Port_StringVendor[VIRTUAL_COM_PORT_SIZ_STRING_VENDOR] =
135 | {
136 | VIRTUAL_COM_PORT_SIZ_STRING_VENDOR, /* Size of Vendor string */
137 | USB_STRING_DESCRIPTOR_TYPE, /* bDescriptorType*/
138 | /* Manufacturer: "tomeko.net" */
139 | 't', 0, 'o', 0, 'm', 0, 'e', 0, 'k', 0, 'o', 0, ' ', 0, 'n', 0,
140 | 'e', 0, 't', 0
141 | };
142 |
143 | const uint8_t Virtual_Com_Port_StringProduct[VIRTUAL_COM_PORT_SIZ_STRING_PRODUCT] =
144 | {
145 | VIRTUAL_COM_PORT_SIZ_STRING_PRODUCT, /* bLength */
146 | USB_STRING_DESCRIPTOR_TYPE, /* bDescriptorType */
147 | /* Product name: "miniscope v2c" */
148 | 'm', 0, 'i', 0, 'n', 0, 'i', 0, 's', 0, 'c', 0, 'o', 0, 'p', 0,
149 | 'e', 0, ' ', 0, 'v', 0, '2', 0, 'c', 0
150 | };
151 |
152 | uint8_t Virtual_Com_Port_StringSerial[VIRTUAL_COM_PORT_SIZ_STRING_SERIAL] =
153 | {
154 | VIRTUAL_COM_PORT_SIZ_STRING_SERIAL, /* bLength */
155 | USB_STRING_DESCRIPTOR_TYPE, /* bDescriptorType */
156 | 'S', 0, 'T', 0, 'M', 0, '3', 0, '2', 0, '1', 0, '0', 0
157 | };
158 |
159 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
160 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_desc.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_desc.h
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Descriptor Header for Virtual COM Port Device
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_DESC_H
18 | #define __USB_DESC_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | /* Exported constants --------------------------------------------------------*/
23 | /* Exported macro ------------------------------------------------------------*/
24 | /* Exported define -----------------------------------------------------------*/
25 | #define USB_DEVICE_DESCRIPTOR_TYPE 0x01
26 | #define USB_CONFIGURATION_DESCRIPTOR_TYPE 0x02
27 | #define USB_STRING_DESCRIPTOR_TYPE 0x03
28 | #define USB_INTERFACE_DESCRIPTOR_TYPE 0x04
29 | #define USB_ENDPOINT_DESCRIPTOR_TYPE 0x05
30 |
31 | #define VIRTUAL_COM_PORT_DATA_SIZE 64
32 | #define VIRTUAL_COM_PORT_INT_SIZE 8
33 |
34 | #define VIRTUAL_COM_PORT_SIZ_DEVICE_DESC 18
35 | #define VIRTUAL_COM_PORT_SIZ_CONFIG_DESC 67
36 | #define VIRTUAL_COM_PORT_SIZ_STRING_LANGID 4
37 | #define VIRTUAL_COM_PORT_SIZ_STRING_VENDOR 22
38 | #define VIRTUAL_COM_PORT_SIZ_STRING_PRODUCT 28
39 | #define VIRTUAL_COM_PORT_SIZ_STRING_SERIAL 26
40 |
41 | #define STANDARD_ENDPOINT_DESC_SIZE 0x09
42 |
43 | /* Exported functions ------------------------------------------------------- */
44 | extern const uint8_t Virtual_Com_Port_DeviceDescriptor[VIRTUAL_COM_PORT_SIZ_DEVICE_DESC];
45 | extern const uint8_t Virtual_Com_Port_ConfigDescriptor[VIRTUAL_COM_PORT_SIZ_CONFIG_DESC];
46 |
47 | extern const uint8_t Virtual_Com_Port_StringLangID[VIRTUAL_COM_PORT_SIZ_STRING_LANGID];
48 | extern const uint8_t Virtual_Com_Port_StringVendor[VIRTUAL_COM_PORT_SIZ_STRING_VENDOR];
49 | extern const uint8_t Virtual_Com_Port_StringProduct[VIRTUAL_COM_PORT_SIZ_STRING_PRODUCT];
50 | extern uint8_t Virtual_Com_Port_StringSerial[VIRTUAL_COM_PORT_SIZ_STRING_SERIAL];
51 |
52 | #endif /* __USB_DESC_H */
53 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
54 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_endp.c:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_endp.c
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Endpoint routines
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | #include "usb_lib.h"
17 | #include "usb_desc.h"
18 | #include "usb_mem.h"
19 | #include "hw_config.h"
20 | #include "usb_istr.h"
21 | #include "usb_pwr.h"
22 | #include "serial.h"
23 | uint8_t USB_Rx_Buffer[VIRTUAL_COM_PORT_DATA_SIZE];
24 |
25 | extern uint8_t serial_tx_buffer[];
26 | extern uint8_t serial_tx_buffer_head;
27 | extern volatile uint8_t serial_tx_buffer_tail;
28 |
29 | void EP3_OUT_Callback(void)
30 | {
31 | uint16_t USB_Rx_Cnt;
32 |
33 | /* Get the received data buffer and update the counter */
34 | USB_Rx_Cnt = USB_SIL_Read(EP3_OUT, USB_Rx_Buffer);
35 |
36 | /* USB data will be immediately processed, this allow next USB traffic being
37 | NAKed till the end of the USART Xfer */
38 |
39 | OnUsbDataRx(USB_Rx_Buffer, USB_Rx_Cnt);
40 |
41 | /* Enable the receive of data on EP3 */
42 | SetEPRxValid(ENDP3);
43 | }
44 | void EP1_IN_Callback (void)
45 | {
46 | if (serial_tx_buffer_head != serial_tx_buffer_tail && (_GetEPTxStatus(ENDP1) == EP_TX_NAK))
47 | {
48 | uint16_t USB_Tx_length;
49 |
50 | if (serial_tx_buffer_head > serial_tx_buffer_tail)
51 | USB_Tx_length = serial_tx_buffer_head - serial_tx_buffer_tail;
52 | else
53 | {
54 | USB_Tx_length = TX_BUFFER_SIZE - serial_tx_buffer_tail + serial_tx_buffer_head;
55 | }
56 |
57 | if (USB_Tx_length != 0)
58 | {
59 | if (USB_Tx_length > 64)
60 | USB_Tx_length = 64;
61 |
62 | // UserToPMABufferCopy(&serial_tx_buffer[serial_tx_buffer_tail], ENDP1_TXADDR, USB_Tx_length);
63 | {
64 | uint8_t *pbUsrBuf = serial_tx_buffer + serial_tx_buffer_tail;
65 | uint32_t n = (USB_Tx_length + 1) >> 1; /* n = (wNBytes + 1) / 2 */
66 | uint32_t i, temp1;
67 | uint16_t *pdwVal;
68 | pdwVal = (uint16_t *)(ENDP1_TXADDR * 2 + PMAAddr);
69 | for (i = n; i != 0; i--)
70 | {
71 | temp1 = (uint16_t) * pbUsrBuf;
72 | pbUsrBuf++;
73 | if (pbUsrBuf - serial_tx_buffer == TX_BUFFER_SIZE)
74 | pbUsrBuf = serial_tx_buffer;
75 |
76 | *pdwVal++ = temp1 | (uint16_t) * pbUsrBuf << 8;
77 | pdwVal++;
78 | pbUsrBuf++;
79 | if (pbUsrBuf - serial_tx_buffer == TX_BUFFER_SIZE)
80 | pbUsrBuf = serial_tx_buffer;
81 | }
82 | }
83 |
84 | SetEPTxCount(ENDP1, USB_Tx_length);
85 | SetEPTxValid(ENDP1);
86 |
87 | serial_tx_buffer_tail += USB_Tx_length;
88 | if (serial_tx_buffer_tail >= TX_BUFFER_SIZE)
89 | serial_tx_buffer_tail -= TX_BUFFER_SIZE;
90 | }
91 | }
92 | }
93 |
94 |
95 | /* \brief Start Of Frame (SOF) callback
96 | */
97 | void SOF_Callback(void)
98 | {
99 | if(bDeviceState == CONFIGURED)
100 | {
101 | /* Check the data to be sent through IN pipe */
102 | EP1_IN_Callback();
103 | }
104 | }
105 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
106 |
107 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_endp.c.bak:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_endp.c
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Endpoint routines
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | #include "usb_lib.h"
17 | #include "usb_desc.h"
18 | #include "usb_mem.h"
19 | #include "hw_config.h"
20 | #include "usb_istr.h"
21 | #include "usb_pwr.h"
22 | #include "serial.h"
23 | uint8_t USB_Rx_Buffer[VIRTUAL_COM_PORT_DATA_SIZE];
24 |
25 | extern uint8_t serial_tx_buffer[];
26 | extern uint8_t serial_tx_buffer_head;
27 | extern volatile uint8_t serial_tx_buffer_tail;
28 |
29 | void EP3_OUT_Callback(void)
30 | {
31 | uint16_t USB_Rx_Cnt;
32 |
33 | /* Get the received data buffer and update the counter */
34 | USB_Rx_Cnt = USB_SIL_Read(EP3_OUT, USB_Rx_Buffer);
35 |
36 | /* USB data will be immediately processed, this allow next USB traffic being
37 | NAKed till the end of the USART Xfer */
38 |
39 | OnUsbDataRx(USB_Rx_Buffer, USB_Rx_Cnt);
40 |
41 | /* Enable the receive of data on EP3 */
42 | SetEPRxValid(ENDP3);
43 | }
44 |
45 | void EP1_IN_Callback (void)
46 | {
47 | if (serial_tx_buffer_head != serial_tx_buffer_tail)
48 | {
49 | uint16_t USB_Tx_length;
50 |
51 | if (serial_tx_buffer_head > serial_tx_buffer_tail)
52 | USB_Tx_length = serial_tx_buffer_head - serial_tx_buffer_tail;
53 | else
54 | {
55 | USB_Tx_length = TX_BUFFER_SIZE - serial_tx_buffer_tail;
56 | }
57 |
58 | if (USB_Tx_length != 0)
59 | {
60 | if (USB_Tx_length > 64)
61 | USB_Tx_length = 64;
62 |
63 | UserToPMABufferCopy(serial_tx_buffer + serial_tx_buffer_tail, ENDP1_TXADDR, USB_Tx_length);
64 | serial_tx_buffer_tail += USB_Tx_length;
65 | if (serial_tx_buffer_tail == TX_BUFFER_SIZE)
66 | serial_tx_buffer_tail = 0;
67 |
68 | SetEPTxCount(ENDP1, USB_Tx_length);
69 | SetEPTxValid(ENDP1);
70 | }
71 | }
72 | }
73 |
74 |
75 | /* \brief Start Of Frame (SOF) callback
76 | */
77 | void SOF_Callback(void)
78 | {
79 | if(bDeviceState == CONFIGURED)
80 | {
81 | /* Check the data to be sent through IN pipe */
82 | if (_GetEPTxStatus(ENDP1) == EP_TX_NAK)
83 | {
84 | EP1_IN_Callback();
85 | }
86 | }
87 | }
88 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
89 |
90 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_istr.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_istr.h
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : This file includes the peripherals header files in the
7 | * user application.
8 | ********************************************************************************
9 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
10 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
11 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
12 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
13 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
14 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
15 | *******************************************************************************/
16 |
17 | /* Define to prevent recursive inclusion -------------------------------------*/
18 | #ifndef __USB_ISTR_H
19 | #define __USB_ISTR_H
20 |
21 | /* Includes ------------------------------------------------------------------*/
22 | #include "usb_conf.h"
23 |
24 | /* Exported types ------------------------------------------------------------*/
25 | /* Exported constants --------------------------------------------------------*/
26 | /* Exported macro ------------------------------------------------------------*/
27 | /* Exported functions ------------------------------------------------------- */
28 |
29 | #ifndef STM32F10X_CL
30 | void USB_Istr(void);
31 | #else /* STM32F10X_CL */
32 | u32 STM32_PCD_OTG_ISR_Handler(void);
33 | #endif /* STM32F10X_CL */
34 |
35 | /* function prototypes Automatically built defining related macros */
36 |
37 | void EP1_IN_Callback(void);
38 | void EP2_IN_Callback(void);
39 | void EP3_IN_Callback(void);
40 | void EP4_IN_Callback(void);
41 | void EP5_IN_Callback(void);
42 | void EP6_IN_Callback(void);
43 | void EP7_IN_Callback(void);
44 |
45 | void EP1_OUT_Callback(void);
46 | void EP2_OUT_Callback(void);
47 | void EP3_OUT_Callback(void);
48 | void EP4_OUT_Callback(void);
49 | void EP5_OUT_Callback(void);
50 | void EP6_OUT_Callback(void);
51 | void EP7_OUT_Callback(void);
52 |
53 | #ifndef STM32F10X_CL
54 |
55 | #ifdef CTR_CALLBACK
56 | void CTR_Callback(void);
57 | #endif
58 |
59 | #ifdef DOVR_CALLBACK
60 | void DOVR_Callback(void);
61 | #endif
62 |
63 | #ifdef ERR_CALLBACK
64 | void ERR_Callback(void);
65 | #endif
66 |
67 | #ifdef WKUP_CALLBACK
68 | void WKUP_Callback(void);
69 | #endif
70 |
71 | #ifdef SUSP_CALLBACK
72 | void SUSP_Callback(void);
73 | #endif
74 |
75 | #ifdef RESET_CALLBACK
76 | void RESET_Callback(void);
77 | #endif
78 |
79 | #ifdef SOF_CALLBACK
80 | void SOF_Callback(void);
81 | #endif
82 |
83 | #ifdef ESOF_CALLBACK
84 | void ESOF_Callback(void);
85 | #endif
86 |
87 | #else /* STM32F10X_CL */
88 |
89 | /* Interrupt subroutines user callbacks prototypes.
90 | These callbacks are called into the respective interrupt subroutine functions
91 | and can be tailored for various user application purposes.
92 | Note: Make sure that the correspondent interrupt is enabled through the
93 | definition in usb_conf.h file */
94 | void INTR_MODEMISMATCH_Callback(void);
95 | void INTR_SOFINTR_Callback(void);
96 | void INTR_RXSTSQLVL_Callback(void);
97 | void INTR_NPTXFEMPTY_Callback(void);
98 | void INTR_GINNAKEFF_Callback(void);
99 | void INTR_GOUTNAKEFF_Callback(void);
100 | void INTR_ERLYSUSPEND_Callback(void);
101 | void INTR_USBSUSPEND_Callback(void);
102 | void INTR_USBRESET_Callback(void);
103 | void INTR_ENUMDONE_Callback(void);
104 | void INTR_ISOOUTDROP_Callback(void);
105 | void INTR_EOPFRAME_Callback(void);
106 | void INTR_EPMISMATCH_Callback(void);
107 | void INTR_INEPINTR_Callback(void);
108 | void INTR_OUTEPINTR_Callback(void);
109 | void INTR_INCOMPLISOIN_Callback(void);
110 | void INTR_INCOMPLISOOUT_Callback(void);
111 | void INTR_WKUPINTR_Callback(void);
112 |
113 | /* Isochronous data update */
114 | void INTR_RXSTSQLVL_ISODU_Callback(void);
115 |
116 | #endif /* STM32F10X_CL */
117 |
118 |
119 | #endif /*__USB_ISTR_H*/
120 |
121 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
122 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_prop.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_prop.h
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : All processing related to Virtual COM Port Demo (Endpoint 0)
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __usb_prop_H
18 | #define __usb_prop_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | typedef struct
23 | {
24 | uint32_t bitrate;
25 | uint8_t format;
26 | uint8_t paritytype;
27 | uint8_t datatype;
28 | }LINE_CODING;
29 |
30 | /* Exported constants --------------------------------------------------------*/
31 | /* Exported macro ------------------------------------------------------------*/
32 | /* Exported define -----------------------------------------------------------*/
33 |
34 | #define Virtual_Com_Port_GetConfiguration NOP_Process
35 | //#define Virtual_Com_Port_SetConfiguration NOP_Process
36 | #define Virtual_Com_Port_GetInterface NOP_Process
37 | #define Virtual_Com_Port_SetInterface NOP_Process
38 | #define Virtual_Com_Port_GetStatus NOP_Process
39 | #define Virtual_Com_Port_ClearFeature NOP_Process
40 | #define Virtual_Com_Port_SetEndPointFeature NOP_Process
41 | #define Virtual_Com_Port_SetDeviceFeature NOP_Process
42 | //#define Virtual_Com_Port_SetDeviceAddress NOP_Process
43 |
44 | #define SEND_ENCAPSULATED_COMMAND 0x00
45 | #define GET_ENCAPSULATED_RESPONSE 0x01
46 | #define SET_COMM_FEATURE 0x02
47 | #define GET_COMM_FEATURE 0x03
48 | #define CLEAR_COMM_FEATURE 0x04
49 | #define SET_LINE_CODING 0x20
50 | #define GET_LINE_CODING 0x21
51 | #define SET_CONTROL_LINE_STATE 0x22
52 | #define SEND_BREAK 0x23
53 |
54 | /* Exported functions ------------------------------------------------------- */
55 | void Virtual_Com_Port_init(void);
56 | void Virtual_Com_Port_Reset(void);
57 | void Virtual_Com_Port_SetConfiguration(void);
58 | void Virtual_Com_Port_SetDeviceAddress (void);
59 | void Virtual_Com_Port_Status_In (void);
60 | void Virtual_Com_Port_Status_Out (void);
61 | RESULT Virtual_Com_Port_Data_Setup(uint8_t);
62 | RESULT Virtual_Com_Port_NoData_Setup(uint8_t);
63 | RESULT Virtual_Com_Port_Get_Interface_Setting(uint8_t Interface, uint8_t AlternateSetting);
64 | uint8_t *Virtual_Com_Port_GetDeviceDescriptor(uint16_t );
65 | uint8_t *Virtual_Com_Port_GetConfigDescriptor(uint16_t);
66 | uint8_t *Virtual_Com_Port_GetStringDescriptor(uint16_t);
67 |
68 | uint8_t *Virtual_Com_Port_GetLineCoding(uint16_t Length);
69 | uint8_t *Virtual_Com_Port_SetLineCoding(uint16_t Length);
70 |
71 | #endif /* __usb_prop_H */
72 |
73 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
74 |
75 |
--------------------------------------------------------------------------------
/Libraries/usb/usb_pwr.h:
--------------------------------------------------------------------------------
1 | /******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
2 | * File Name : usb_pwr.h
3 | * Author : MCD Application Team
4 | * Version : V3.3.0
5 | * Date : 21-March-2011
6 | * Description : Connection/disconnection & power management header
7 | ********************************************************************************
8 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
9 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
10 | * AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
11 | * INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
12 | * CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
13 | * INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
14 | *******************************************************************************/
15 |
16 | /* Define to prevent recursive inclusion -------------------------------------*/
17 | #ifndef __USB_PWR_H
18 | #define __USB_PWR_H
19 |
20 | /* Includes ------------------------------------------------------------------*/
21 | /* Exported types ------------------------------------------------------------*/
22 | typedef enum _RESUME_STATE
23 | {
24 | RESUME_EXTERNAL,
25 | RESUME_INTERNAL,
26 | RESUME_LATER,
27 | RESUME_WAIT,
28 | RESUME_START,
29 | RESUME_ON,
30 | RESUME_OFF,
31 | RESUME_ESOF
32 | } RESUME_STATE;
33 |
34 | typedef enum _DEVICE_STATE
35 | {
36 | UNCONNECTED,
37 | ATTACHED,
38 | POWERED,
39 | SUSPENDED,
40 | ADDRESSED,
41 | CONFIGURED
42 | } DEVICE_STATE;
43 |
44 | /* Exported constants --------------------------------------------------------*/
45 | /* Exported macro ------------------------------------------------------------*/
46 | /* Exported functions ------------------------------------------------------- */
47 | void Suspend(void);
48 | void Resume_Init(void);
49 | void Resume(RESUME_STATE eResumeSetVal);
50 | RESULT PowerOn(void);
51 | RESULT PowerOff(void);
52 |
53 | /* External variables --------------------------------------------------------*/
54 | extern __IO uint32_t bDeviceState; /* USB device status */
55 | extern __IO bool fSuspendEnabled; /* true when suspend is possible */
56 |
57 | #endif /*__USB_PWR_H*/
58 |
59 | /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
60 |
--------------------------------------------------------------------------------
/Libraries/util/CVS/Entries:
--------------------------------------------------------------------------------
1 | /stm32eeprom.h/1.1/Sun Jul 3 23:54:54 2016//
2 | /stm32f10x_it.c/1.1/Tue Mar 8 07:10:30 2016//
3 | D
4 |
--------------------------------------------------------------------------------
/Libraries/util/CVS/Entries.Extra:
--------------------------------------------------------------------------------
1 | /stm32eeprom.h///1470196397/
2 | /stm32f10x_it.c///1470196397/
3 |
--------------------------------------------------------------------------------
/Libraries/util/CVS/Entries.Extra.Old:
--------------------------------------------------------------------------------
1 | /stm32f10x_it.c////
2 | /stm32eeprom.h////
3 |
--------------------------------------------------------------------------------
/Libraries/util/CVS/Entries.Old:
--------------------------------------------------------------------------------
1 | /stm32f10x_it.c/0/Initial stm32f10x_it.c//
2 | /stm32eeprom.h/0/Initial stm32eeprom.h//
3 | D
4 |
--------------------------------------------------------------------------------
/Libraries/util/CVS/Repository:
--------------------------------------------------------------------------------
1 | Code/grbl1.0d/stm32grbl/util
2 |
--------------------------------------------------------------------------------
/Libraries/util/CVS/Root:
--------------------------------------------------------------------------------
1 | :local:E:/CVSRep
2 |
--------------------------------------------------------------------------------
/Libraries/util/stm32eeprom.h:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file EEPROM_Emulation/inc/eeprom.h
4 | * @author MCD Application Team
5 | * @version V3.1.0
6 | * @date 07/27/2009
7 | * @brief This file contains all the functions prototypes for the EEPROM
8 | * emulation firmware library.
9 | ******************************************************************************
10 | * @copy
11 | *
12 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
13 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
14 | * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
15 | * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
16 | * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
17 | * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
18 | *
19 | * © COPYRIGHT 2009 STMicroelectronics
20 | */
21 |
22 | /* Define to prevent recursive inclusion -------------------------------------*/
23 | #ifndef __EEPROM_H
24 | #define __EEPROM_H
25 |
26 | /* Includes ------------------------------------------------------------------*/
27 | #include "stm32f10x_flash.h"
28 |
29 | /* Exported constants --------------------------------------------------------*/
30 | /* Define the STM32F10Xxx Flash page size depending on the used STM32 device */
31 | #if defined (STM32F10X_LD) || defined (STM32F10X_MD)
32 | #define PAGE_SIZE (uint16_t)0x400 /* Page size = 1KByte */
33 | #elif defined (STM32F10X_HD) || defined (STM32F10X_CL)
34 | #define PAGE_SIZE (uint16_t)0x800 /* Page size = 2KByte */
35 | #endif
36 |
37 | /* EEPROM start address in Flash */
38 | #define EEPROM_START_ADDRESS ((uint32_t)0x0801fc00) /* EEPROM emulation start address:
39 | after 64KByte of used Flash memory */
40 |
41 | #endif /* __EEPROM_H */
42 |
43 | /******************* (C) COPYRIGHT 2009 STMicroelectronics *****END OF FILE****/
44 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # grbl_stm32
2 | GRBL for STM32 controller.
3 |
4 | ## Development Environment
5 | | | |
6 | |----------------------|---------------------------|
7 | | **IDE** | TrueSTUDIO for STM32 v9.0 |
8 | | **Controller board** | STM32F103C8T6 (Bluepill) |
9 |
10 | ## Reference
11 | - GRBL CNC controller ported to STM32 controller
12 | ```https://github.com/usbcnc/grbl```
13 | - GRBL CNC controller
14 | ```https://github.com/gnea/grbl```
15 |
16 | ## Pin Diagram
17 |
18 | 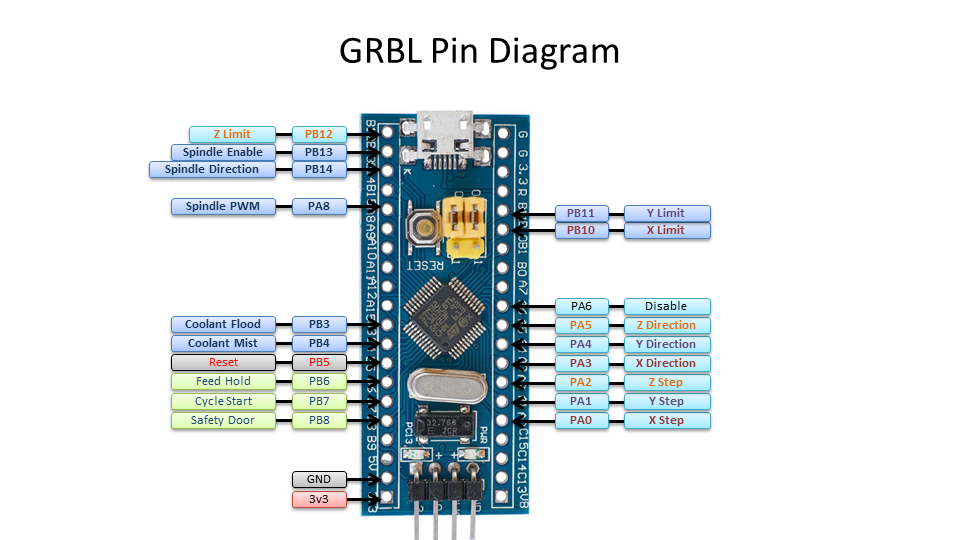
19 |
--------------------------------------------------------------------------------
/docs/STM32F103C8T8_Bluepill.pptx:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/docs/STM32F103C8T8_Bluepill.pptx
--------------------------------------------------------------------------------
/docs/STM32F103C8T8_Bluepill_PinDiagram.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/helimp/grbl_stm32/2b0da66044d5f8f1eedbd8b2afb913b48dcef4ad/docs/STM32F103C8T8_Bluepill_PinDiagram.png
--------------------------------------------------------------------------------
/grbl_stm32.elf.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
--------------------------------------------------------------------------------
/src/stm32f10x_conf.h:
--------------------------------------------------------------------------------
1 | /**
2 | ******************************************************************************
3 | * @file RTC/Calendar/stm32f10x_conf.h
4 | * @author MCD Application Team
5 | * @version V3.4.0
6 | * @date 10/15/2010
7 | * @brief Library configuration file.
8 | ******************************************************************************
9 | * @copy
10 | *
11 | * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
12 | * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
13 | * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
14 | * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
15 | * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
16 | * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
17 | *
18 | * © COPYRIGHT 2010 STMicroelectronics
19 | */
20 |
21 | /* Define to prevent recursive inclusion -------------------------------------*/
22 | #ifndef __STM32F10x_CONF_H
23 | #define __STM32F10x_CONF_H
24 |
25 | /* Includes ------------------------------------------------------------------*/
26 | /* Uncomment the line below to enable peripheral header file inclusion */
27 | /* #include "stm32f10x_adc.h" */
28 | /* #include "stm32f10x_bkp.h" */
29 | /* #include "stm32f10x_can.h" */
30 | /* #include "stm32f10x_cec.h" */
31 | /* #include "stm32f10x_crc.h" */
32 | /* #include "stm32f10x_dac.h" */
33 | /* #include "stm32f10x_dbgmcu.h" */
34 | /* #include "stm32f10x_dma.h" */
35 | /* #include "stm32f10x_exti.h" */
36 | /* #include "stm32f10x_flash.h" */
37 | /* #include "stm32f10x_fsmc.h" */
38 | /* #include "stm32f10x_gpio.h" */
39 | /* #include "stm32f10x_i2c.h" */
40 | /* #include "stm32f10x_iwdg.h" */
41 | /* #include "stm32f10x_pwr.h" */
42 | /* #include "stm32f10x_rcc.h" */
43 | /* #include "stm32f10x_rtc.h" */
44 | /* #include "stm32f10x_sdio.h" */
45 | /* #include "stm32f10x_spi.h" */
46 | /* #include "stm32f10x_tim.h" */
47 | /* #include "stm32f10x_usart.h" */
48 | /* #include "stm32f10x_wwdg.h" */
49 | /* #include "misc.h" */ /* High level functions for NVIC and SysTick (add-on to CMSIS functions) */
50 |
51 |
52 | /* Exported types ------------------------------------------------------------*/
53 | /* Exported constants --------------------------------------------------------*/
54 | /* Uncomment the line below to expanse the "assert_param" macro in the
55 | Standard Peripheral Library drivers code */
56 | /* #define USE_FULL_ASSERT 1 */
57 |
58 | /* Exported macro ------------------------------------------------------------*/
59 | #ifdef USE_FULL_ASSERT
60 |
61 | /**
62 | * @brief The assert_param macro is used for function's parameters check.
63 | * @param expr: If expr is false, it calls assert_failed function
64 | * which reports the name of the source file and the source
65 | * line number of the call that failed.
66 | * If expr is true, it returns no value.
67 | * @retval None
68 | */
69 | #define assert_param(expr) ((expr) ? (void)0 : assert_failed((uint8_t *)__FILE__, __LINE__))
70 | /* Exported functions ------------------------------------------------------- */
71 | void assert_failed(uint8_t* file, uint32_t line);
72 | #else
73 | #define assert_param(expr) ((void)0)
74 | #endif /* USE_FULL_ASSERT */
75 |
76 | #endif /* __STM32F10x_CONF_H */
77 |
78 | /******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
79 |
--------------------------------------------------------------------------------
/stm32_flash.ld:
--------------------------------------------------------------------------------
1 | /*
2 | ******************************************************************************
3 | File: stm32_flash.ld
4 | Info: Generated by Atollic TrueSTUDIO(R) 9.0.0 2019-01-22
5 |
6 | Abstract: Linker script for STM32F103C8 device
7 | Set heap size, stack size, stack location, memory areas and
8 | sections according to application requirements.
9 |
10 | The MIT License (MIT)
11 | Copyright (c) 2018 STMicroelectronics
12 |
13 | Permission is hereby granted, free of charge, to any person obtaining a copy
14 | of this software and associated documentation files (the "Software"), to deal
15 | in the Software without restriction, including without limitation the rights
16 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
17 | copies of the Software, and to permit persons to whom the Software is
18 | furnished to do so, subject to the following conditions:
19 |
20 | The above copyright notice and this permission notice shall be included in all
21 | copies or substantial portions of the Software.
22 |
23 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
24 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
25 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
26 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
27 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
28 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
29 | SOFTWARE.
30 |
31 | ******************************************************************************
32 | */
33 |
34 | /* Entry Point */
35 | ENTRY(Reset_Handler)
36 |
37 | /* Highest address of the user mode stack */
38 | _estack = 0x20005000; /* end of 20K RAM */
39 |
40 | /* Generate a link error if heap and stack don't fit into RAM */
41 | _Min_Heap_Size = 0; /* required amount of heap */
42 | _Min_Stack_Size = 0x100; /* required amount of stack */
43 |
44 | /* Specify the memory areas */
45 | MEMORY
46 | {
47 | FLASH (rx) : ORIGIN = 0x08000000, LENGTH = 64K
48 | RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 20K
49 | MEMORY_B1 (rx) : ORIGIN = 0x60000000, LENGTH = 0K
50 | }
51 |
52 | /* Define output sections */
53 | SECTIONS
54 | {
55 | /* The startup code goes first into FLASH */
56 | .isr_vector :
57 | {
58 | . = ALIGN(4);
59 | KEEP(*(.isr_vector)) /* Startup code */
60 | . = ALIGN(4);
61 | } >FLASH
62 |
63 | /* The program code and other data goes into FLASH */
64 | .text :
65 | {
66 | . = ALIGN(4);
67 | *(.text) /* .text sections (code) */
68 | *(.text*) /* .text* sections (code) */
69 | *(.glue_7) /* glue arm to thumb code */
70 | *(.glue_7t) /* glue thumb to arm code */
71 | *(.eh_frame)
72 |
73 | KEEP (*(.init))
74 | KEEP (*(.fini))
75 |
76 | . = ALIGN(4);
77 | _etext = .; /* define a global symbols at end of code */
78 | } >FLASH
79 |
80 | /* Constant data goes into FLASH */
81 | .rodata :
82 | {
83 | . = ALIGN(4);
84 | *(.rodata) /* .rodata sections (constants, strings, etc.) */
85 | *(.rodata*) /* .rodata* sections (constants, strings, etc.) */
86 | . = ALIGN(4);
87 | } >FLASH
88 |
89 | .ARM.extab : { *(.ARM.extab* .gnu.linkonce.armextab.*) } >FLASH
90 | .ARM : {
91 | __exidx_start = .;
92 | *(.ARM.exidx*)
93 | __exidx_end = .;
94 | } >FLASH
95 |
96 | .preinit_array :
97 | {
98 | PROVIDE_HIDDEN (__preinit_array_start = .);
99 | KEEP (*(.preinit_array*))
100 | PROVIDE_HIDDEN (__preinit_array_end = .);
101 | } >FLASH
102 | .init_array :
103 | {
104 | PROVIDE_HIDDEN (__init_array_start = .);
105 | KEEP (*(SORT(.init_array.*)))
106 | KEEP (*(.init_array*))
107 | PROVIDE_HIDDEN (__init_array_end = .);
108 | } >FLASH
109 | .fini_array :
110 | {
111 | PROVIDE_HIDDEN (__fini_array_start = .);
112 | KEEP (*(SORT(.fini_array.*)))
113 | KEEP (*(.fini_array*))
114 | PROVIDE_HIDDEN (__fini_array_end = .);
115 | } >FLASH
116 |
117 | /* used by the startup to initialize data */
118 | _sidata = LOADADDR(.data);
119 |
120 | /* Initialized data sections goes into RAM, load LMA copy after code */
121 | .data :
122 | {
123 | . = ALIGN(4);
124 | _sdata = .; /* create a global symbol at data start */
125 | *(.data) /* .data sections */
126 | *(.data*) /* .data* sections */
127 |
128 | . = ALIGN(4);
129 | _edata = .; /* define a global symbol at data end */
130 | } >RAM AT> FLASH
131 |
132 | /* Uninitialized data section */
133 | . = ALIGN(4);
134 | .bss :
135 | {
136 | /* This is used by the startup in order to initialize the .bss secion */
137 | _sbss = .; /* define a global symbol at bss start */
138 | __bss_start__ = _sbss;
139 | *(.bss)
140 | *(.bss*)
141 | *(COMMON)
142 |
143 | . = ALIGN(4);
144 | _ebss = .; /* define a global symbol at bss end */
145 | __bss_end__ = _ebss;
146 | } >RAM
147 |
148 | /* User_heap_stack section, used to check that there is enough RAM left */
149 | ._user_heap_stack :
150 | {
151 | . = ALIGN(4);
152 | PROVIDE ( end = . );
153 | PROVIDE ( _end = . );
154 | . = . + _Min_Heap_Size;
155 | . = . + _Min_Stack_Size;
156 | . = ALIGN(4);
157 | } >RAM
158 |
159 | /* MEMORY_bank1 section, code must be located here explicitly */
160 | /* Example: extern int foo(void) __attribute__ ((section (".mb1text"))); */
161 | .memory_b1_text :
162 | {
163 | *(.mb1text) /* .mb1text sections (code) */
164 | *(.mb1text*) /* .mb1text* sections (code) */
165 | *(.mb1rodata) /* read-only data (constants) */
166 | *(.mb1rodata*)
167 | } >MEMORY_B1
168 |
169 | /* Remove information from the standard libraries */
170 | /DISCARD/ :
171 | {
172 | libc.a ( * )
173 | libm.a ( * )
174 | libgcc.a ( * )
175 | }
176 |
177 | .ARM.attributes 0 : { *(.ARM.attributes) }
178 | }
179 |
--------------------------------------------------------------------------------