├── ASCOMDriver
├── ArduinoST4Driver
│ ├── .gitignore
│ ├── ArduinoST4Driver
│ │ ├── .gitignore
│ │ ├── ASCOM.ico
│ │ ├── ASCOM.png
│ │ ├── Resources
│ │ │ └── ASCOM.bmp
│ │ ├── ASCOMDriverTemplate.snk
│ │ ├── Properties
│ │ │ ├── Settings.settings
│ │ │ ├── Settings.Designer.cs
│ │ │ ├── AssemblyInfo.cs
│ │ │ ├── Resources.Designer.cs
│ │ │ └── Resources.resx
│ │ ├── app.config
│ │ ├── Axis.cs
│ │ ├── Orientation.cs
│ │ ├── Constants.cs
│ │ ├── SetupDialogForm.cs
│ │ ├── AxisMovementTracker.cs
│ │ ├── SetupDialogForm.resx
│ │ ├── DeviceController.cs
│ │ ├── Rates.cs
│ │ ├── ArduinoST4Driver.csproj
│ │ ├── AxisController.cs
│ │ ├── SetupDialogForm.designer.cs
│ │ └── Driver.cs
│ ├── ArduinoST4TestForms
│ │ ├── .gitignore
│ │ ├── Properties
│ │ │ ├── Settings.settings
│ │ │ ├── AssemblyInfo.cs
│ │ │ ├── Settings.Designer.cs
│ │ │ ├── Resources.Designer.cs
│ │ │ └── Resources.resx
│ │ ├── Program.cs
│ │ ├── app.config
│ │ ├── Form1.cs
│ │ ├── Form1.Designer.cs
│ │ ├── ArduinoST4TestForms.csproj
│ │ └── Form1.resx
│ ├── ArduinoST4Driver.v12.suo
│ └── ArduinoST4Driver.sln
└── Installer
│ └── ArduinoST4 Setup.iss
├── Hardware
├── diagram.png
├── final_back.jpg
├── final_case.png
├── final_front.jpg
├── prototype.png
├── prototype_small.png
├── plugged_into_scope.jpg
└── plugged_into_scope_small.jpg
├── Wiki
├── DriverSelection.png
└── DriverConfiguration.png
├── ArduinoCode
└── ArduinoCode.ino
└── README.md
/ASCOMDriver/ArduinoST4Driver/.gitignore:
--------------------------------------------------------------------------------
1 | .vs
2 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/.gitignore:
--------------------------------------------------------------------------------
1 | bin
2 | obj
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/.gitignore:
--------------------------------------------------------------------------------
1 | bin
2 | obj
--------------------------------------------------------------------------------
/Hardware/diagram.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/diagram.png
--------------------------------------------------------------------------------
/Hardware/final_back.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/final_back.jpg
--------------------------------------------------------------------------------
/Hardware/final_case.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/final_case.png
--------------------------------------------------------------------------------
/Hardware/final_front.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/final_front.jpg
--------------------------------------------------------------------------------
/Hardware/prototype.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/prototype.png
--------------------------------------------------------------------------------
/Wiki/DriverSelection.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Wiki/DriverSelection.png
--------------------------------------------------------------------------------
/Hardware/prototype_small.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/prototype_small.png
--------------------------------------------------------------------------------
/Wiki/DriverConfiguration.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Wiki/DriverConfiguration.png
--------------------------------------------------------------------------------
/Hardware/plugged_into_scope.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/plugged_into_scope.jpg
--------------------------------------------------------------------------------
/Hardware/plugged_into_scope_small.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/Hardware/plugged_into_scope_small.jpg
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver.v12.suo:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver.v12.suo
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ASCOM.ico:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ASCOM.ico
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ASCOM.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ASCOM.png
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Resources/ASCOM.bmp:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Resources/ASCOM.bmp
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ASCOMDriverTemplate.snk:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kevinferrare/arduino-st4/HEAD/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ASCOMDriverTemplate.snk
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Properties/Settings.settings:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Properties/Settings.settings:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Program.cs:
--------------------------------------------------------------------------------
1 | using System;
2 | using System.Collections.Generic;
3 | using System.Linq;
4 | using System.Windows.Forms;
5 |
6 | namespace ASCOM.ArduinoST4
7 | {
8 | static class Program
9 | {
10 | ///
11 | /// The main entry point for the application.
12 | ///
13 | [STAThread]
14 | static void Main()
15 | {
16 | Application.EnableVisualStyles();
17 | Application.SetCompatibleTextRenderingDefault(false);
18 | Application.Run(new Form1());
19 | }
20 | }
21 | }
22 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/app.config:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Axis.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | namespace ASCOM.ArduinoST4
17 | {
18 | enum Axis
19 | {
20 | RA = 0,
21 | DEC = 1
22 | }
23 | }
24 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/app.config:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Orientation.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | namespace ASCOM.ArduinoST4
17 | {
18 | ///
19 | /// Orientation of the movement along an axis. Can be forward (PLUS) or backward (MINUS)
20 | ///
21 | enum Orientation
22 | {
23 | PLUS, MINUS
24 | }
25 | }
26 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Constants.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | namespace ASCOM.ArduinoST4
17 | {
18 | ///
19 | /// Constants used by the driver
20 | ///
21 | /// Author: Kevin Ferrare
22 | class Constants
23 | {
24 | public const double DEGREES_PER_SECOND = 360d / (24d * 3600d);
25 | public const double RA_PER_SECOND = 1d / 3600d;
26 | }
27 | }
28 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Properties/Settings.Designer.cs:
--------------------------------------------------------------------------------
1 | //------------------------------------------------------------------------------
2 | //
3 | // This code was generated by a tool.
4 | // Runtime Version:4.0.30319.18052
5 | //
6 | // Changes to this file may cause incorrect behavior and will be lost if
7 | // the code is regenerated.
8 | //
9 | //------------------------------------------------------------------------------
10 |
11 | namespace ASCOM.ArduinoST4.Properties
12 | {
13 |
14 |
15 | [global::System.Runtime.CompilerServices.CompilerGeneratedAttribute()]
16 | [global::System.CodeDom.Compiler.GeneratedCodeAttribute("Microsoft.VisualStudio.Editors.SettingsDesigner.SettingsSingleFileGenerator", "10.0.0.0")]
17 | internal sealed partial class Settings : global::System.Configuration.ApplicationSettingsBase
18 | {
19 |
20 | private static Settings defaultInstance = ((Settings)(global::System.Configuration.ApplicationSettingsBase.Synchronized(new Settings())));
21 |
22 | public static Settings Default
23 | {
24 | get
25 | {
26 | return defaultInstance;
27 | }
28 | }
29 | }
30 | }
31 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Properties/AssemblyInfo.cs:
--------------------------------------------------------------------------------
1 | using System.Reflection;
2 | using System.Runtime.CompilerServices;
3 | using System.Runtime.InteropServices;
4 |
5 | // General Information about an assembly is controlled through the following
6 | // set of attributes. Change these attribute values to modify the information
7 | // associated with an assembly.
8 | [assembly: AssemblyTitle("ASCOM Driver Test Forms Application")]
9 | [assembly: AssemblyDescription("")]
10 | [assembly: AssemblyConfiguration("")]
11 | [assembly: AssemblyCompany("ASCOM Initiative")]
12 | [assembly: AssemblyProduct("Driver Test Forms Application Template CSharp")]
13 | [assembly: AssemblyCopyright("Copyright © ASCOM Initiative 2014")]
14 | [assembly: AssemblyTrademark("")]
15 | [assembly: AssemblyCulture("")]
16 |
17 | // Setting ComVisible to false makes the types in this assembly not visible
18 | // to COM components. If you need to access a type in this assembly from
19 | // COM, set the ComVisible attribute to true on that type.
20 | [assembly: ComVisible(false)]
21 |
22 | // The following GUID is for the ID of the typelib if this project is exposed to COM
23 | [assembly: Guid("e6c7b090-1f16-486f-bdba-d45785e9f6f1")]
24 |
25 | // Version information for an assembly consists of the following four values:
26 | //
27 | // Major Version
28 | // Minor Version
29 | // Build Number
30 | // Revision
31 | //
32 | // You can specify all the values or you can default the Build and Revision Numbers
33 | // by using the '*' as shown below:
34 | // [assembly: AssemblyVersion("1.0.*")]
35 | [assembly: AssemblyVersion("6.0.0.0")]
36 | [assembly: AssemblyFileVersion("6.0.0.0")]
37 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Properties/AssemblyInfo.cs:
--------------------------------------------------------------------------------
1 | using System.Reflection;
2 | using System.Runtime.CompilerServices;
3 | using System.Runtime.InteropServices;
4 |
5 | // General Information about an assembly is controlled through the following
6 | // set of attributes. Change these attribute values to modify the information
7 | // associated with an assembly.
8 | //
9 | // TODO - Add your authorship information here
10 | [assembly: AssemblyTitle("ASCOM.ArduinoST4.Telescope")]
11 | [assembly: AssemblyDescription("ASCOM Telescope driver for ArduinoST4")]
12 | [assembly: AssemblyConfiguration("")]
13 | [assembly: AssemblyCompany("The ASCOM Initiative")]
14 | [assembly: AssemblyProduct("ASCOM Telescope driver for ArduinoST4")]
15 | [assembly: AssemblyCopyright("Copyright © 2014 The ASCOM Initiative")]
16 | [assembly: AssemblyTrademark("")]
17 | [assembly: AssemblyCulture("")]
18 |
19 | // Setting ComVisible to false makes the types in this assembly not visible
20 | // to COM components. If you need to access a type in this assembly from
21 | // COM, set the ComVisible attribute to true on that type.
22 | [assembly: ComVisible(true)]
23 |
24 | // The following GUID is for the ID of the typelib if this project is exposed to COM
25 | [assembly: Guid("275d986f-45db-4fb0-8289-ff95c4d63c63")]
26 |
27 | // Version information for an assembly consists of the following four values:
28 | //
29 | // Major Version
30 | // Minor Version
31 | // Build Number
32 | // Revision
33 | //
34 | // You can specify all the values or you can default the Revision and Build Numbers
35 | // by using the '*' as shown below:
36 | //
37 | [assembly: AssemblyVersion("6.0.*")]
38 | [assembly: AssemblyFileVersion("6.0.0.0")]
39 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Properties/Settings.Designer.cs:
--------------------------------------------------------------------------------
1 | //------------------------------------------------------------------------------
2 | //
3 | // This code was generated by a tool.
4 | // Runtime Version:4.0.30319.18444
5 | //
6 | // Changes to this file may cause incorrect behavior and will be lost if
7 | // the code is regenerated.
8 | //
9 | //------------------------------------------------------------------------------
10 |
11 | namespace ASCOM.ArduinoST4.Properties
12 | {
13 |
14 |
15 | [global::System.Runtime.CompilerServices.CompilerGeneratedAttribute()]
16 | [global::System.CodeDom.Compiler.GeneratedCodeAttribute("Microsoft.VisualStudio.Editors.SettingsDesigner.SettingsSingleFileGenerator", "11.0.0.0")]
17 | internal sealed partial class Settings : global::System.Configuration.ApplicationSettingsBase
18 | {
19 |
20 | private static Settings defaultInstance = ((Settings)(global::System.Configuration.ApplicationSettingsBase.Synchronized(new Settings())));
21 |
22 | public static Settings Default
23 | {
24 | get
25 | {
26 | return defaultInstance;
27 | }
28 | }
29 |
30 | [global::System.Configuration.UserScopedSettingAttribute()]
31 | [global::System.Diagnostics.DebuggerNonUserCodeAttribute()]
32 | [global::System.Configuration.DefaultSettingValueAttribute("")]
33 | public string DriverId
34 | {
35 | get
36 | {
37 | return ((string)(this["DriverId"]));
38 | }
39 | set
40 | {
41 | this["DriverId"] = value;
42 | }
43 | }
44 | }
45 | }
46 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Form1.cs:
--------------------------------------------------------------------------------
1 | using System;
2 | using System.Windows.Forms;
3 |
4 | namespace ASCOM.ArduinoST4
5 | {
6 | public partial class Form1 : Form
7 | {
8 |
9 | private ASCOM.DriverAccess.Telescope driver;
10 |
11 | public Form1()
12 | {
13 | InitializeComponent();
14 | SetUIState();
15 | }
16 |
17 | private void Form1_FormClosing(object sender, FormClosingEventArgs e)
18 | {
19 | if (IsConnected)
20 | driver.Connected = false;
21 |
22 | Properties.Settings.Default.Save();
23 | }
24 |
25 | private void buttonChoose_Click(object sender, EventArgs e)
26 | {
27 | Properties.Settings.Default.DriverId = ASCOM.DriverAccess.Telescope.Choose(Properties.Settings.Default.DriverId);
28 | SetUIState();
29 | }
30 |
31 | private void buttonConnect_Click(object sender, EventArgs e)
32 | {
33 | if (IsConnected)
34 | {
35 | driver.Connected = false;
36 | }
37 | else
38 | {
39 | driver = new ASCOM.DriverAccess.Telescope(Properties.Settings.Default.DriverId);
40 | driver.Connected = true;
41 | }
42 | SetUIState();
43 | }
44 |
45 | private void SetUIState()
46 | {
47 | buttonConnect.Enabled = !string.IsNullOrEmpty(Properties.Settings.Default.DriverId);
48 | buttonChoose.Enabled = !IsConnected;
49 | buttonConnect.Text = IsConnected ? "Disconnect" : "Connect";
50 | }
51 |
52 | private bool IsConnected
53 | {
54 | get
55 | {
56 | return ((this.driver != null) && (driver.Connected == true));
57 | }
58 | }
59 | }
60 | }
61 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver.sln:
--------------------------------------------------------------------------------
1 |
2 | Microsoft Visual Studio Solution File, Format Version 12.00
3 | # Visual Studio 14
4 | VisualStudioVersion = 14.0.25420.1
5 | MinimumVisualStudioVersion = 10.0.40219.1
6 | Project("{FAE04EC0-301F-11D3-BF4B-00C04F79EFBC}") = "ArduinoST4Driver", "ArduinoST4Driver\ArduinoST4Driver.csproj", "{64308775-BD4A-469C-BCAB-3ED830B811AF}"
7 | EndProject
8 | Project("{FAE04EC0-301F-11D3-BF4B-00C04F79EFBC}") = "ArduinoST4TestForms", "ArduinoST4TestForms\ArduinoST4TestForms.csproj", "{8E8D406C-1838-4914-867D-AB602D0EAF3E}"
9 | EndProject
10 | Global
11 | GlobalSection(SolutionConfigurationPlatforms) = preSolution
12 | Debug|Any CPU = Debug|Any CPU
13 | Debug|Mixed Platforms = Debug|Mixed Platforms
14 | Debug|x86 = Debug|x86
15 | Release|Any CPU = Release|Any CPU
16 | Release|Mixed Platforms = Release|Mixed Platforms
17 | Release|x86 = Release|x86
18 | EndGlobalSection
19 | GlobalSection(ProjectConfigurationPlatforms) = postSolution
20 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Debug|Any CPU.ActiveCfg = Debug|Any CPU
21 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Debug|Any CPU.Build.0 = Debug|Any CPU
22 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Debug|Mixed Platforms.ActiveCfg = Debug|Any CPU
23 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Debug|Mixed Platforms.Build.0 = Debug|Any CPU
24 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Debug|x86.ActiveCfg = Debug|x86
25 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Debug|x86.Build.0 = Debug|x86
26 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Release|Any CPU.ActiveCfg = Release|Any CPU
27 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Release|Any CPU.Build.0 = Release|Any CPU
28 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Release|Mixed Platforms.ActiveCfg = Release|Any CPU
29 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Release|Mixed Platforms.Build.0 = Release|Any CPU
30 | {64308775-BD4A-469C-BCAB-3ED830B811AF}.Release|x86.ActiveCfg = Release|Any CPU
31 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Debug|Any CPU.ActiveCfg = Debug|x86
32 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Debug|Mixed Platforms.ActiveCfg = Debug|x86
33 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Debug|Mixed Platforms.Build.0 = Debug|x86
34 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Debug|x86.ActiveCfg = Debug|x86
35 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Debug|x86.Build.0 = Debug|x86
36 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Release|Any CPU.ActiveCfg = Release|x86
37 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Release|Mixed Platforms.ActiveCfg = Release|x86
38 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Release|Mixed Platforms.Build.0 = Release|x86
39 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Release|x86.ActiveCfg = Release|x86
40 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}.Release|x86.Build.0 = Release|x86
41 | EndGlobalSection
42 | GlobalSection(SolutionProperties) = preSolution
43 | HideSolutionNode = FALSE
44 | EndGlobalSection
45 | EndGlobal
46 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Properties/Resources.Designer.cs:
--------------------------------------------------------------------------------
1 | //------------------------------------------------------------------------------
2 | //
3 | // This code was generated by a tool.
4 | // Runtime Version:4.0.30319.18444
5 | //
6 | // Changes to this file may cause incorrect behavior and will be lost if
7 | // the code is regenerated.
8 | //
9 | //------------------------------------------------------------------------------
10 |
11 | namespace ASCOM.ArduinoST4.Properties
12 | {
13 | using System;
14 |
15 |
16 | ///
17 | /// A strongly-typed resource class, for looking up localized strings, etc.
18 | ///
19 | // This class was auto-generated by the StronglyTypedResourceBuilder
20 | // class via a tool like ResGen or Visual Studio.
21 | // To add or remove a member, edit your .ResX file then rerun ResGen
22 | // with the /str option, or rebuild your VS project.
23 | [global::System.CodeDom.Compiler.GeneratedCodeAttribute("System.Resources.Tools.StronglyTypedResourceBuilder", "4.0.0.0")]
24 | [global::System.Diagnostics.DebuggerNonUserCodeAttribute()]
25 | [global::System.Runtime.CompilerServices.CompilerGeneratedAttribute()]
26 | internal class Resources
27 | {
28 |
29 | private static global::System.Resources.ResourceManager resourceMan;
30 |
31 | private static global::System.Globalization.CultureInfo resourceCulture;
32 |
33 | [global::System.Diagnostics.CodeAnalysis.SuppressMessageAttribute("Microsoft.Performance", "CA1811:AvoidUncalledPrivateCode")]
34 | internal Resources()
35 | {
36 | }
37 |
38 | ///
39 | /// Returns the cached ResourceManager instance used by this class.
40 | ///
41 | [global::System.ComponentModel.EditorBrowsableAttribute(global::System.ComponentModel.EditorBrowsableState.Advanced)]
42 | internal static global::System.Resources.ResourceManager ResourceManager
43 | {
44 | get
45 | {
46 | if (object.ReferenceEquals(resourceMan, null))
47 | {
48 | global::System.Resources.ResourceManager temp = new global::System.Resources.ResourceManager("ASCOM.ArduinoST4.Properties.Resources", typeof(Resources).Assembly);
49 | resourceMan = temp;
50 | }
51 | return resourceMan;
52 | }
53 | }
54 |
55 | ///
56 | /// Overrides the current thread's CurrentUICulture property for all
57 | /// resource lookups using this strongly typed resource class.
58 | ///
59 | [global::System.ComponentModel.EditorBrowsableAttribute(global::System.ComponentModel.EditorBrowsableState.Advanced)]
60 | internal static global::System.Globalization.CultureInfo Culture
61 | {
62 | get
63 | {
64 | return resourceCulture;
65 | }
66 | set
67 | {
68 | resourceCulture = value;
69 | }
70 | }
71 | }
72 | }
73 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/SetupDialogForm.cs:
--------------------------------------------------------------------------------
1 | using System;
2 | using System.Runtime.InteropServices;
3 | using System.Windows.Forms;
4 |
5 | namespace ASCOM.ArduinoST4
6 | {
7 | [ComVisible(false)] // Form not registered for COM!
8 | public partial class SetupDialogForm : Form
9 | {
10 | public SetupDialogForm()
11 | {
12 | InitializeComponent();
13 | populateSerialComboBox();
14 | // Initialise current values of user settings from the ASCOM Profile
15 | this.comPortComboBox.Text = Telescope.comPort;
16 | this.traceStateCheckBox.Checked = Telescope.traceState;
17 | this.rightAscensionPlusSideralRateTextBox.Text = Telescope.rightAscensionSideralRatePlus.ToString();
18 | this.rightAscensionMinusSideralRateTextBox.Text = Telescope.rightAscensionSideralRateMinus.ToString();
19 | this.declinationPlusSideralRateTextBox.Text = Telescope.declinationSideralRatePlus.ToString();
20 | this.declinationMinusSideralRateTextBox.Text = Telescope.declinationSideralRateMinus.ToString();
21 | }
22 |
23 | ///
24 | /// Reads the available COM ports on the computer and adds them to the COM Port combobox
25 | ///
26 | private void populateSerialComboBox()
27 | {
28 | string[] serialPorts = System.IO.Ports.SerialPort.GetPortNames();
29 | foreach (string serialPort in serialPorts)
30 | {
31 | this.comPortComboBox.Items.Add(serialPort);
32 | }
33 | }
34 |
35 | private void cmdOK_Click(object sender, EventArgs e) // OK button event handler
36 | {
37 | // Update the state variables with results from the dialogue
38 | Telescope.comPort = comPortComboBox.Text;
39 | Telescope.traceState = traceStateCheckBox.Checked;
40 | Telescope.rightAscensionSideralRatePlus = Convert.ToDouble(this.rightAscensionPlusSideralRateTextBox.Text);
41 | Telescope.rightAscensionSideralRateMinus = Convert.ToDouble(this.rightAscensionMinusSideralRateTextBox.Text);
42 | Telescope.declinationSideralRatePlus = Convert.ToDouble(this.declinationPlusSideralRateTextBox.Text);
43 | Telescope.declinationSideralRateMinus = Convert.ToDouble(this.declinationMinusSideralRateTextBox.Text);
44 | }
45 |
46 | private void cmdCancel_Click(object sender, EventArgs e) // Cancel button event handler
47 | {
48 | Close();
49 | }
50 |
51 | private void BrowseToAscom(object sender, EventArgs e) // Click on ASCOM logo event handler
52 | {
53 | try
54 | {
55 | System.Diagnostics.Process.Start("http://ascom-standards.org/");
56 | }
57 | catch (System.ComponentModel.Win32Exception noBrowser)
58 | {
59 | if (noBrowser.ErrorCode == -2147467259)
60 | MessageBox.Show(noBrowser.Message);
61 | }
62 | catch (System.Exception other)
63 | {
64 | MessageBox.Show(other.Message);
65 | }
66 | }
67 |
68 | private void SetupDialogForm_Load(object sender, EventArgs e)
69 | {
70 |
71 | }
72 | }
73 | }
--------------------------------------------------------------------------------
/ArduinoCode/ArduinoCode.ino:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 | //
16 | // Copyright Kevin Ferrare 2014
17 |
18 | /*
19 | * Led indicates whether the software requested connection, it is shut off when the software disconnects
20 | */
21 | const int pinLED = 13;
22 |
23 | /**
24 | * An axis has a pin per direction.
25 | * Both pins cannot be up at the same time.
26 | */
27 | class Axis {
28 | private:
29 | int plusPin;
30 | int minusPin;
31 | public:
32 | Axis(int plusPin, int minusPin) :
33 | plusPin(plusPin), minusPin(minusPin) {
34 | }
35 | void setupPins(){
36 | pinMode(this->plusPin, OUTPUT);
37 | pinMode(this->minusPin, OUTPUT);
38 | }
39 | void plus(){
40 | digitalWrite(this->minusPin, LOW);
41 | digitalWrite(this->plusPin, HIGH);
42 | }
43 | void minus(){
44 | digitalWrite(this->plusPin, LOW);
45 | digitalWrite(this->minusPin, HIGH);
46 | }
47 | void reset(){
48 | digitalWrite(this->minusPin, LOW);
49 | digitalWrite(this->plusPin, LOW);
50 | }
51 | };
52 |
53 | class Axis rightAscension(
54 | 2,//RA+ pin
55 | 5);//RA- pin
56 | class Axis declination(
57 | 3,//DEC+ pin
58 | 4);//DEC- pin
59 |
60 | void setup()
61 | {
62 | rightAscension.setupPins();
63 | declination.setupPins();
64 | pinMode(pinLED, OUTPUT);
65 | //57.6k, 8 data bits, no parity, one stop bit.
66 | Serial.begin(57600, SERIAL_8N1);
67 | //Wait for serial port to connect. Needed for Leonardo only
68 | while (!Serial);
69 | Serial.println("INITIALIZED#");
70 | }
71 |
72 | void resetPins(){
73 | rightAscension.reset();
74 | declination.reset();
75 | }
76 |
77 | void loop()
78 | {
79 | if (Serial.available() > 0) {
80 | //Received something
81 | String opcode = Serial.readStringUntil('#');
82 | boolean validOpcode=true;
83 | //Parse opcode
84 | if(opcode=="CONNECT"){
85 | digitalWrite(pinLED, HIGH);
86 | resetPins();
87 | }
88 | else if (opcode=="DISCONNECT"){
89 | digitalWrite(pinLED, LOW);
90 | resetPins();
91 | }
92 | else if(opcode=="RA0"){
93 | rightAscension.reset();
94 | }
95 | else if(opcode=="RA+"){
96 | rightAscension.plus();
97 | }
98 | else if(opcode=="RA-"){
99 | rightAscension.minus();
100 | }
101 | else if(opcode=="DEC0"){
102 | declination.reset();
103 | }
104 | else if(opcode=="DEC+"){
105 | declination.plus();
106 | }
107 | else if(opcode=="DEC-"){
108 | declination.minus();
109 | }
110 | else{
111 | validOpcode=false;
112 | }
113 | if(validOpcode){
114 | //Acknowledge valid command
115 | Serial.println("OK#");
116 | }
117 | }
118 | }
119 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/AxisMovementTracker.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | using System;
17 |
18 | namespace ASCOM.ArduinoST4
19 | {
20 | ///
21 | /// Keeps track of the position of an axis.
22 | ///
23 | /// Updates the position from the slew rate and the movement start / stop time
24 | ///
25 | /// Author: Kevin Ferrare
26 | class AxisMovementTracker
27 | {
28 |
29 | ///
30 | /// Start position before slewing started. Is updated when calling Stop().
31 | ///
32 | private double position = 0;
33 |
34 | ///
35 | /// Slew rate for the axis
36 | ///
37 | private double slewRate;
38 |
39 | ///
40 | /// Time at which the slewing started, used to calculate the current position
41 | ///
42 | private DateTime slewStartTime;
43 |
44 | public AxisMovementTracker()
45 | {
46 | }
47 |
48 | ///
49 | /// Calculate the position delta from time represented by the slewStartTime property until now.
50 | ///
51 | ///
52 | private double CalculateCurrentPositionDelta()
53 | {
54 | TimeSpan slewTime = DateTime.Now - this.slewStartTime;
55 | return slewRate * slewTime.TotalSeconds;
56 | }
57 |
58 | ///
59 | /// Position of the axis. The value returned is calculated when the axis is moving.
60 | ///
61 | public double Position
62 | {
63 | get
64 | {
65 | //If moving, returns calculated position
66 | if (this.SlewRate != 0)
67 | {
68 | return this.position + this.CalculateCurrentPositionDelta();
69 | }
70 | else
71 | {
72 | return this.position;
73 | }
74 |
75 | }
76 | set
77 | {
78 | this.position = value;
79 | }
80 | }
81 |
82 | ///
83 | /// Rate at which the axis is moving
84 | ///
85 | public double SlewRate
86 | {
87 | get
88 | {
89 | return this.slewRate;
90 | }
91 | }
92 |
93 | ///
94 | /// Start keeping track of the movement with the given slew rate
95 | ///
96 | /// Rate at which the axis is moving
97 | public void Start(double slewRate)
98 | {
99 | this.slewRate = slewRate;
100 | this.slewStartTime = DateTime.Now;
101 | }
102 |
103 | ///
104 | /// Stop keeping track of the movement
105 | ///
106 | public void Stop()
107 | {
108 | this.position += CalculateCurrentPositionDelta();
109 | this.slewRate = 0;
110 | }
111 | }
112 | }
113 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Properties/Resources.Designer.cs:
--------------------------------------------------------------------------------
1 | //------------------------------------------------------------------------------
2 | //
3 | // This code was generated by a tool.
4 | // Runtime Version:4.0.30319.18052
5 | //
6 | // Changes to this file may cause incorrect behavior and will be lost if
7 | // the code is regenerated.
8 | //
9 | //------------------------------------------------------------------------------
10 |
11 | namespace ASCOM.ArduinoST4.Properties
12 | {
13 | using System;
14 |
15 |
16 | ///
17 | /// A strongly-typed resource class, for looking up localized strings, etc.
18 | ///
19 | // This class was auto-generated by the StronglyTypedResourceBuilder
20 | // class via a tool like ResGen or Visual Studio.
21 | // To add or remove a member, edit your .ResX file then rerun ResGen
22 | // with the /str option, or rebuild your VS project.
23 | [global::System.CodeDom.Compiler.GeneratedCodeAttribute("System.Resources.Tools.StronglyTypedResourceBuilder", "4.0.0.0")]
24 | [global::System.Diagnostics.DebuggerNonUserCodeAttribute()]
25 | [global::System.Runtime.CompilerServices.CompilerGeneratedAttribute()]
26 | internal class Resources
27 | {
28 |
29 | private static global::System.Resources.ResourceManager resourceMan;
30 |
31 | private static global::System.Globalization.CultureInfo resourceCulture;
32 |
33 | [global::System.Diagnostics.CodeAnalysis.SuppressMessageAttribute("Microsoft.Performance", "CA1811:AvoidUncalledPrivateCode")]
34 | internal Resources()
35 | {
36 | }
37 |
38 | ///
39 | /// Returns the cached ResourceManager instance used by this class.
40 | ///
41 | [global::System.ComponentModel.EditorBrowsableAttribute(global::System.ComponentModel.EditorBrowsableState.Advanced)]
42 | internal static global::System.Resources.ResourceManager ResourceManager
43 | {
44 | get
45 | {
46 | if (object.ReferenceEquals(resourceMan, null))
47 | {
48 | global::System.Resources.ResourceManager temp = new global::System.Resources.ResourceManager("ASCOM.ArduinoST4.Properties.Resources", typeof(Resources).Assembly);
49 | resourceMan = temp;
50 | }
51 | return resourceMan;
52 | }
53 | }
54 |
55 | ///
56 | /// Overrides the current thread's CurrentUICulture property for all
57 | /// resource lookups using this strongly typed resource class.
58 | ///
59 | [global::System.ComponentModel.EditorBrowsableAttribute(global::System.ComponentModel.EditorBrowsableState.Advanced)]
60 | internal static global::System.Globalization.CultureInfo Culture
61 | {
62 | get
63 | {
64 | return resourceCulture;
65 | }
66 | set
67 | {
68 | resourceCulture = value;
69 | }
70 | }
71 |
72 | ///
73 | /// Looks up a localized resource of type System.Drawing.Bitmap.
74 | ///
75 | internal static System.Drawing.Bitmap ASCOM
76 | {
77 | get
78 | {
79 | object obj = ResourceManager.GetObject("ASCOM", resourceCulture);
80 | return ((System.Drawing.Bitmap)(obj));
81 | }
82 | }
83 |
84 | ///
85 | /// Looks up a localized resource of type System.Drawing.Icon similar to (Icon).
86 | ///
87 | internal static System.Drawing.Icon DefaultIcon
88 | {
89 | get
90 | {
91 | object obj = ResourceManager.GetObject("DefaultIcon", resourceCulture);
92 | return ((System.Drawing.Icon)(obj));
93 | }
94 | }
95 | }
96 | }
97 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Form1.Designer.cs:
--------------------------------------------------------------------------------
1 | namespace ASCOM.ArduinoST4
2 | {
3 | partial class Form1
4 | {
5 | ///
6 | /// Required designer variable.
7 | ///
8 | private System.ComponentModel.IContainer components = null;
9 |
10 | ///
11 | /// Clean up any resources being used.
12 | ///
13 | /// true if managed resources should be disposed; otherwise, false.
14 | protected override void Dispose(bool disposing)
15 | {
16 | if (disposing && (components != null))
17 | {
18 | components.Dispose();
19 | }
20 | base.Dispose(disposing);
21 | }
22 |
23 | #region Windows Form Designer generated code
24 |
25 | ///
26 | /// Required method for Designer support - do not modify
27 | /// the contents of this method with the code editor.
28 | ///
29 | private void InitializeComponent()
30 | {
31 | this.buttonChoose = new System.Windows.Forms.Button();
32 | this.buttonConnect = new System.Windows.Forms.Button();
33 | this.labelDriverId = new System.Windows.Forms.Label();
34 | this.SuspendLayout();
35 | //
36 | // buttonChoose
37 | //
38 | this.buttonChoose.Location = new System.Drawing.Point(309, 10);
39 | this.buttonChoose.Name = "buttonChoose";
40 | this.buttonChoose.Size = new System.Drawing.Size(72, 23);
41 | this.buttonChoose.TabIndex = 0;
42 | this.buttonChoose.Text = "Choose";
43 | this.buttonChoose.UseVisualStyleBackColor = true;
44 | this.buttonChoose.Click += new System.EventHandler(this.buttonChoose_Click);
45 | //
46 | // buttonConnect
47 | //
48 | this.buttonConnect.Location = new System.Drawing.Point(309, 39);
49 | this.buttonConnect.Name = "buttonConnect";
50 | this.buttonConnect.Size = new System.Drawing.Size(72, 23);
51 | this.buttonConnect.TabIndex = 1;
52 | this.buttonConnect.Text = "Connect";
53 | this.buttonConnect.UseVisualStyleBackColor = true;
54 | this.buttonConnect.Click += new System.EventHandler(this.buttonConnect_Click);
55 | //
56 | // labelDriverId
57 | //
58 | this.labelDriverId.BorderStyle = System.Windows.Forms.BorderStyle.FixedSingle;
59 | this.labelDriverId.DataBindings.Add(new System.Windows.Forms.Binding("Text", global::ASCOM.ArduinoST4.Properties.Settings.Default, "DriverId", true, System.Windows.Forms.DataSourceUpdateMode.OnPropertyChanged));
60 | this.labelDriverId.Location = new System.Drawing.Point(12, 40);
61 | this.labelDriverId.Name = "labelDriverId";
62 | this.labelDriverId.Size = new System.Drawing.Size(291, 21);
63 | this.labelDriverId.TabIndex = 2;
64 | this.labelDriverId.Text = global::ASCOM.ArduinoST4.Properties.Settings.Default.DriverId;
65 | this.labelDriverId.TextAlign = System.Drawing.ContentAlignment.MiddleLeft;
66 | //
67 | // Form1
68 | //
69 | this.AutoScaleDimensions = new System.Drawing.SizeF(6F, 13F);
70 | this.AutoScaleMode = System.Windows.Forms.AutoScaleMode.Font;
71 | this.ClientSize = new System.Drawing.Size(409, 262);
72 | this.Controls.Add(this.labelDriverId);
73 | this.Controls.Add(this.buttonConnect);
74 | this.Controls.Add(this.buttonChoose);
75 | this.Name = "Form1";
76 | this.Text = "TEMPLATEDEVICETYPE Test";
77 | this.FormClosing += new System.Windows.Forms.FormClosingEventHandler(this.Form1_FormClosing);
78 | this.ResumeLayout(false);
79 |
80 | }
81 |
82 | #endregion
83 |
84 | private System.Windows.Forms.Button buttonChoose;
85 | private System.Windows.Forms.Button buttonConnect;
86 | private System.Windows.Forms.Label labelDriverId;
87 | }
88 | }
89 |
90 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/ArduinoST4TestForms.csproj:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 | Debug
5 | x86
6 | 8.0.30703
7 | 2.0
8 | {8E8D406C-1838-4914-867D-AB602D0EAF3E}
9 | WinExe
10 | Properties
11 | ASCOM.ArduinoST4
12 | ASCOM.ArduinoST4.Test
13 | v4.0
14 | 512
15 |
16 |
17 |
18 | x86
19 | true
20 | full
21 | false
22 | bin\Debug\
23 | DEBUG;TRACE
24 | prompt
25 | 4
26 |
27 |
28 | x86
29 | pdbonly
30 | true
31 | bin\Release\
32 | TRACE
33 | prompt
34 | 4
35 |
36 |
37 |
38 |
39 |
40 |
41 |
42 |
43 |
44 |
45 |
46 |
47 |
48 |
49 |
50 |
51 | Form
52 |
53 |
54 | Form1.cs
55 |
56 |
57 |
58 |
59 | Form1.cs
60 |
61 |
62 | ResXFileCodeGenerator
63 | Resources.Designer.cs
64 | Designer
65 |
66 |
67 | True
68 | Resources.resx
69 | True
70 |
71 |
72 |
73 | SettingsSingleFileGenerator
74 | Settings.Designer.cs
75 |
76 |
77 | True
78 | Settings.settings
79 | True
80 |
81 |
82 |
83 |
90 |
--------------------------------------------------------------------------------
/ASCOMDriver/Installer/ArduinoST4 Setup.iss:
--------------------------------------------------------------------------------
1 | ;
2 | ; Script generated by the ASCOM Driver Installer Script Generator 6.0.0.0
3 | ; Generated by Kevin Ferrare on 2015-01-17 (UTC)
4 | ;
5 | [Setup]
6 | AppID={{d4b5de5b-9b10-47eb-8d49-f91ee606f7f1}
7 | AppName=ASCOM ArduinoST4 Telescope Driver
8 | AppVerName=ASCOM ArduinoST4 Telescope Driver 1.0
9 | AppVersion=1.0
10 | AppPublisher=Kevin Ferrare
11 | AppPublisherURL=mailto:kevinferrare@gmail.com
12 | AppSupportURL=https://code.google.com/p/arduino-st4/
13 | AppUpdatesURL=https://code.google.com/p/arduino-st4/
14 | VersionInfoVersion=1.0.0
15 | MinVersion=0,5.0.2195sp4
16 | DefaultDirName="{cf}\ASCOM\Telescope"
17 | DisableDirPage=yes
18 | DisableProgramGroupPage=yes
19 | OutputDir="."
20 | OutputBaseFilename="ArduinoST4 Setup"
21 | Compression=lzma
22 | SolidCompression=yes
23 | ; Put there by Platform if Driver Installer Support selected
24 | WizardImageFile="C:\Program Files (x86)\ASCOM\Platform 6 Developer Components\Installer Generator\Resources\WizardImage.bmp"
25 | ; {cf}\ASCOM\Uninstall\Telescope folder created by Platform, always
26 | UninstallFilesDir="{cf}\ASCOM\Uninstall\Telescope\ArduinoST4"
27 |
28 | [Languages]
29 | Name: "english"; MessagesFile: "compiler:Default.isl"
30 |
31 | [Dirs]
32 | Name: "{cf}\ASCOM\Uninstall\Telescope\ArduinoST4"
33 | ; TODO: Add subfolders below {app} as needed (e.g. Name: "{app}\MyFolder")
34 |
35 | [Files]
36 | Source: "..\ArduinoST4Driver\ArduinoST4Driver\bin\Release\ASCOM.ArduinoST4.Telescope.dll"; DestDir: "{app}"
37 | ; Optional source files (COM and .NET aware)
38 |
39 | ; Only if driver is .NET
40 | [Run]
41 | ; Only for .NET assembly/in-proc drivers
42 | Filename: "{dotnet4032}\regasm.exe"; Parameters: "/codebase ""{app}\ASCOM.ArduinoST4.Telescope.dll"""; Flags: runhidden 32bit
43 | Filename: "{dotnet4064}\regasm.exe"; Parameters: "/codebase ""{app}\ASCOM.ArduinoST4.Telescope.dll"""; Flags: runhidden 64bit; Check: IsWin64
44 |
45 |
46 |
47 |
48 | ; Only if driver is .NET
49 | [UninstallRun]
50 | ; Only for .NET assembly/in-proc drivers
51 | Filename: "{dotnet4032}\regasm.exe"; Parameters: "-u ""{app}\ASCOM.ArduinoST4.Telescope.dll"""; Flags: runhidden 32bit
52 | Filename: "{dotnet4064}\regasm.exe"; Parameters: "-u ""{app}\ASCOM.ArduinoST4.Telescope.dll"""; Flags: runhidden 64bit; Check: IsWin64
53 |
54 |
55 |
56 |
57 | [CODE]
58 | //
59 | // Before the installer UI appears, verify that the (prerequisite)
60 | // ASCOM Platform 6.0 or greater is installed, including both Helper
61 | // components. Utility is required for all types (COM and .NET)!
62 | //
63 | function InitializeSetup(): Boolean;
64 | var
65 | U : Variant;
66 | H : Variant;
67 | begin
68 | Result := FALSE; // Assume failure
69 | // check that the DriverHelper and Utilities objects exist, report errors if they don't
70 | try
71 | H := CreateOLEObject('DriverHelper.Util');
72 | except
73 | MsgBox('The ASCOM DriverHelper object has failed to load, this indicates a serious problem with the ASCOM installation', mbInformation, MB_OK);
74 | end;
75 | try
76 | U := CreateOLEObject('ASCOM.Utilities.Util');
77 | except
78 | MsgBox('The ASCOM Utilities object has failed to load, this indicates that the ASCOM Platform has not been installed correctly', mbInformation, MB_OK);
79 | end;
80 | try
81 | if (U.IsMinimumRequiredVersion(6,0)) then // this will work in all locales
82 | Result := TRUE;
83 | except
84 | end;
85 | if(not Result) then
86 | MsgBox('The ASCOM Platform 6.0 or greater is required for this driver.', mbInformation, MB_OK);
87 | end;
88 |
89 | // Code to enable the installer to uninstall previous versions of itself when a new version is installed
90 | procedure CurStepChanged(CurStep: TSetupStep);
91 | var
92 | ResultCode: Integer;
93 | UninstallExe: String;
94 | UninstallRegistry: String;
95 | begin
96 | if (CurStep = ssInstall) then // Install step has started
97 | begin
98 | // Create the correct registry location name, which is based on the AppId
99 | UninstallRegistry := ExpandConstant('Software\Microsoft\Windows\CurrentVersion\Uninstall\{#SetupSetting("AppId")}' + '_is1');
100 | // Check whether an extry exists
101 | if RegQueryStringValue(HKLM, UninstallRegistry, 'UninstallString', UninstallExe) then
102 | begin // Entry exists and previous version is installed so run its uninstaller quietly after informing the user
103 | MsgBox('Setup will now remove the previous version.', mbInformation, MB_OK);
104 | Exec(RemoveQuotes(UninstallExe), ' /SILENT', '', SW_SHOWNORMAL, ewWaitUntilTerminated, ResultCode);
105 | sleep(1000); //Give enough time for the install screen to be repainted before continuing
106 | end
107 | end;
108 | end;
109 |
110 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Form1.resx:
--------------------------------------------------------------------------------
1 |
2 |
3 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
71 |
72 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
82 |
83 |
84 |
85 |
86 |
87 |
88 |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
97 |
98 |
99 |
100 |
101 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 | text/microsoft-resx
110 |
111 |
112 | 2.0
113 |
114 |
115 | System.Resources.ResXResourceReader, System.Windows.Forms, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
116 |
117 |
118 | System.Resources.ResXResourceWriter, System.Windows.Forms, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
119 |
120 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/SetupDialogForm.resx:
--------------------------------------------------------------------------------
1 |
2 |
3 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
71 |
72 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
82 |
83 |
84 |
85 |
86 |
87 |
88 |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
97 |
98 |
99 |
100 |
101 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 | text/microsoft-resx
110 |
111 |
112 | 2.0
113 |
114 |
115 | System.Resources.ResXResourceReader, System.Windows.Forms, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
116 |
117 |
118 | System.Resources.ResXResourceWriter, System.Windows.Forms, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
119 |
120 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4TestForms/Properties/Resources.resx:
--------------------------------------------------------------------------------
1 |
2 |
3 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
71 |
72 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
82 |
83 |
84 |
85 |
86 |
87 |
88 |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
97 |
98 |
99 |
100 |
101 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 | text/microsoft-resx
110 |
111 |
112 | 2.0
113 |
114 |
115 | System.Resources.ResXResourceReader, System.Windows.Forms, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
116 |
117 |
118 | System.Resources.ResXResourceWriter, System.Windows.Forms, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
119 |
120 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/DeviceController.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | using ASCOM.Utilities;
17 | using System;
18 |
19 | namespace ASCOM.ArduinoST4
20 | {
21 | ///
22 | /// Hardware communication is implemented here.
23 | ///
24 | /// Author: Kevin Ferrare
25 | class DeviceController : IDisposable
26 | {
27 | private TraceLogger traceLogger;
28 |
29 | ///
30 | /// Serial connection to the device
31 | ///
32 | private Serial serialConnection = new Serial();
33 |
34 | ///
35 | /// Whether the device is connected or not
36 | ///
37 | private Boolean connected;
38 |
39 | public DeviceController()
40 | {
41 | traceLogger = new TraceLogger("", "ArduinoST4 DeviceController");
42 | traceLogger.Enabled = true;
43 | connected = false;
44 | }
45 |
46 | ///
47 | /// Connect to the arduino with the given com port.
48 | ///
49 | ///
50 | public void Connect(String comPort)
51 | {
52 | traceLogger.LogMessage("Connected Set", "Connecting to port " + comPort);
53 | serialConnection.PortName = comPort;
54 | //57.6k
55 | serialConnection.Speed = SerialSpeed.ps57600;
56 | //No parity
57 | serialConnection.Parity = SerialParity.None;
58 | //Stop bit one
59 | serialConnection.StopBits = SerialStopBits.One;
60 | serialConnection.DataBits = 8;
61 | //Timeout, initial message can take up to 5 seconds while the arduino initializes
62 | serialConnection.ReceiveTimeout = 5;
63 | serialConnection.Connected = true;
64 |
65 | //The arduino will send "INITIALIZED" by itself once it is ready (can take several seconds)
66 | String initialMessage = ReadResponse();
67 | //Reset device and light up the LED
68 | this.connected = CommandBool("CONNECT");
69 | if (!this.connected)
70 | {
71 | //close serial connection when it failed
72 | serialConnection.Connected = false;
73 | }
74 | }
75 |
76 | ///
77 | /// Disconnect from the arduino
78 | ///
79 | public void Disconnect()
80 | {
81 | //Tell bye-bye to the device
82 | CommandBool("DISCONNECT");
83 | this.connected = false;
84 | traceLogger.LogMessage("Connected Set", "Disconnecting");
85 | serialConnection.Connected = false;
86 | }
87 |
88 | ///
89 | /// Return true when connected
90 | ///
91 | public bool Connected
92 | {
93 | get
94 | {
95 | traceLogger.LogMessage("Connected Get", connected.ToString());
96 | return this.connected;
97 | }
98 | }
99 |
100 | ///
101 | /// Send the given command to the device.
102 | ///
103 | /// Command to send
104 | /// true if it has been understood correctly
105 | public bool CommandBool(string command)
106 | {
107 | string ret = CommandString(command);
108 | //Successful commands should return OK
109 | return ret.Equals("OK");
110 | }
111 |
112 | ///
113 | /// Send the given command to the device.
114 | ///
115 | /// Command to send
116 | /// Response returned by the device
117 | public string CommandString(string command)
118 | {
119 | traceLogger.LogMessage("CommandString", "Sending command " + command);
120 | //All commands from and to the arduino ends with #
121 | serialConnection.Transmit(command + "#");
122 | return ReadResponse();
123 | }
124 |
125 | ///
126 | /// Read a response from the arduino and returns it
127 | ///
128 | private String ReadResponse()
129 | {
130 | traceLogger.LogMessage("ReadResponse", "Reading response");
131 | String response = serialConnection.ReceiveTerminated("#");
132 | response = response.Replace("#", "").Replace("\r", "").Replace("\n", "");
133 | traceLogger.LogMessage("ReadResponse", "Received response " + response);
134 | return response;
135 | }
136 |
137 | ///
138 | /// Tell the hardware to start / stop moving on the given axis.
139 | /// If the given orientation is null, the movement will stop.
140 | ///
141 | /// Axis to move
142 | /// Orientation along the axis
143 | public void Move(Axis axis, Orientation? orientation)
144 | {
145 | //Do nothing if not connected
146 | if (!this.Connected)
147 | {
148 | return;
149 | }
150 | String axisName = axis.ToString();
151 | if (orientation == null)
152 | {
153 | //Stops the movement for the axis
154 | this.CommandBool(axisName + "0");
155 | }
156 | else
157 | {
158 | String sign = (Orientation)orientation == Orientation.PLUS ? "+" : "-";
159 | this.CommandBool(axisName + sign);
160 | }
161 | }
162 |
163 | public void Dispose()
164 | {
165 | traceLogger.Enabled = false;
166 | traceLogger.Dispose();
167 | traceLogger = null;
168 | serialConnection.Dispose();
169 | }
170 | }
171 | }
172 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Properties/Resources.resx:
--------------------------------------------------------------------------------
1 |
2 |
3 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
71 |
72 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
82 |
83 |
84 |
85 |
86 |
87 |
88 |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
97 |
98 |
99 |
100 |
101 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 | text/microsoft-resx
110 |
111 |
112 | 2.0
113 |
114 |
115 | System.Resources.ResXResourceReader, System.Windows.Forms, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
116 |
117 |
118 | System.Resources.ResXResourceWriter, System.Windows.Forms, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089
119 |
120 |
121 |
122 | ..\ASCOM.png;System.Drawing.Bitmap, System.Drawing, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a
123 |
124 |
125 | ..\ASCOM.ico;System.Drawing.Icon, System.Drawing, Version=2.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a
126 |
127 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # Purpose
2 | The purpose of this project is to connect a telescope to a computer through the mount guide port (ST-4 port) using an arduino. This is similar to [GPUSB](http://www.store.shoestringastronomy.com/gpusb.htm).
3 |
4 | The ST-4 Port is present on some computerized mounts and it is easy to [add one](http://thx8411.over-blog.com/pages/Add_an_ST4_port_on_the_EQ4EQ5_motor_drives-3258969.html) to motorized mounts like the EQ3 / EQ4 / EQ5. Refer to [this](http://www.store.shoestringastronomy.com/downloads/HCModGuidance.pdf) for other mounts modifications.
5 |
6 | Building your own ST-4 adapter costs less than available commercial solutions (~6 USD) and on the top of providing autoguiding, the custom driver also has a working GOTO functionality.
7 |
8 | ## Functionalities
9 | Autoguiding and GOTO are supported, this allows the telescope to be used for astrophotography using PHD or for finding objects in the sky with a software like stellarium or cartes du ciel.
10 |
11 | GOTO will require a good polar alignment in order to have acceptable accuracy.
12 |
13 | The slewing speed will be limited by the mount maximal speed.
14 |
15 | ## Implementation
16 | The project has 3 main components:
17 | * The hardware
18 | * The arduino software
19 | * The ASCOM driver
20 |
21 | # Getting started
22 | ## Building the hardware
23 | The hardware is built from off the shelf cheap components, you can buy them from ebay:
24 | * An arduino with an USB port (I used the Nano v3 clone since it is cheap and small).
25 | * An optocoupler (I used the TLP521-4).
26 | * A RJ12 socket.
27 | * A RJ12 straight cable (6P6C).
28 | * A bunch of 100 Ohm resistors to protect the optocoupler leds (it works without those as well)
29 |
30 | The connection between the components is as below:
31 |
32 | 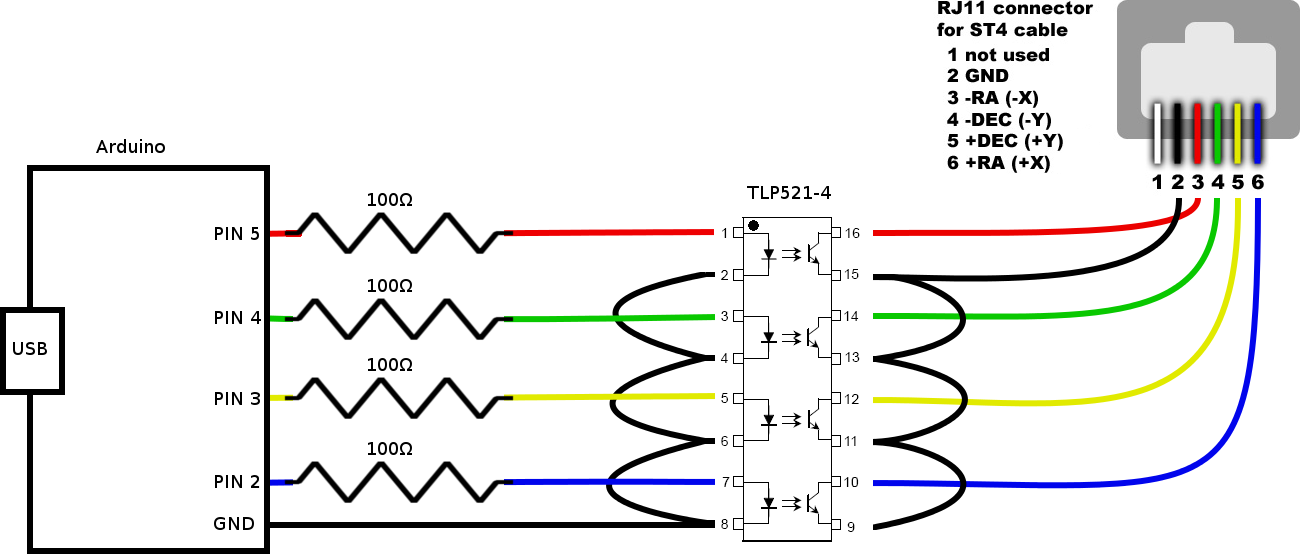
33 |
34 | Be careful not to invert GND with some other pins.
35 |
36 | Please note that some mounts may have a different pinout for ST-4.
37 |
38 | My first version looked like this (quick and dirty solders, very fragile!):
39 |
40 | 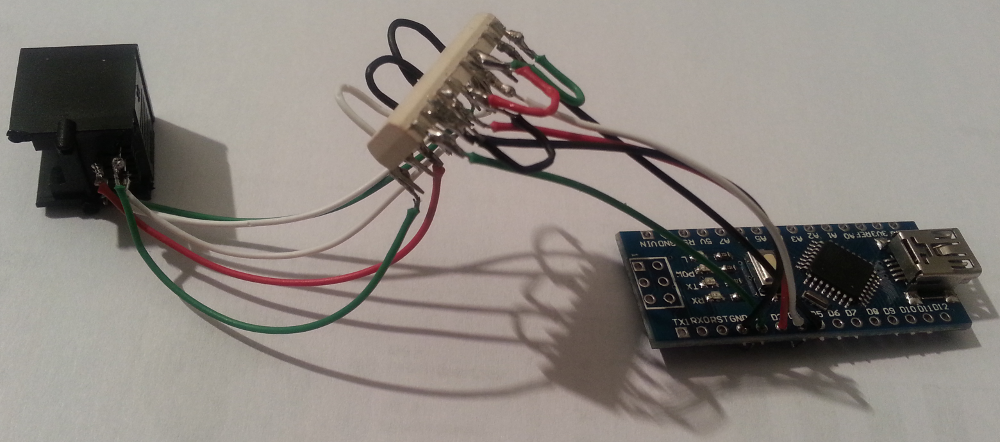
41 |
42 | It is also possible to avoid buying the RJ12 cable and the connector by soldering the optocoupler directly to the mount controler.
43 |
44 | ## Flashing the arduino
45 | Once the hardware is built, you have to upload the code to the arduino.
46 | * Download the [arduino IDE](http://arduino.cc/en/main/software#toc1)
47 | * Download the [firmware](https://github.com/kevinferrare/arduino-st4/releases/download/1.0/ArduinoCode.ino)
48 | * Connect your arduino to your PC, open the downloaded .ino file with the IDE and click on the upload button (there are plenty of tutorials on the internet describing how to upload code to an arduino if you need more details)
49 |
50 | At this point, you should be able to send commands to the arduino through the serial monitor of the IDE and to test if you can control you telescope axes (bitrate is 57.6k, if you see garbled output, you might want to check this).
51 |
52 | Accepted commands are:
53 |
54 | Command | Action
55 | --------|-------
56 | CONNECT# | Stop all the moves and light up the arduino LED
57 | RA+# | Start moving right ascension axis towards upper position
58 | RA-# | Start moving right ascension axis towards lower position
59 | RA0# | Stop moving right ascension axis
60 | DEC+# | Start moving declination axis towards upper position
61 | DEC-# | Start moving declination axis towards lower position
62 | DEC0# | Stop moving declination axis
63 | DISCONNECT# | Stop all the moves and shut down the arduino LED
64 |
65 | The arduino should respond "OK#" to all the commands above. The commands should all end with #.
66 |
67 | If the telescope is not behaving as expected, check your connections, you may have inverted some cables.
68 |
69 | ## Installing the ASCOM driver
70 | First, please check that the [ASCOM platform](http://ascom-standards.org/) v6.0 (or higher) is installed on your computer.
71 |
72 | Then download and run the installer:
73 | https://github.com/kevinferrare/arduino-st4/releases/download/1.0/ArduinoST4.Setup.exe
74 |
75 | ## Configuring the driver
76 | * Open any software you would like to use with your telescope (for example [cartes du ciel](http://www.ap-i.net/skychart/en/start) or [PHD](http://www.stark-labs.com/phdguiding.html))
77 | * Open the connection dialog
78 | * Select the "ArduinoST4 telescope driver"
79 |
80 | 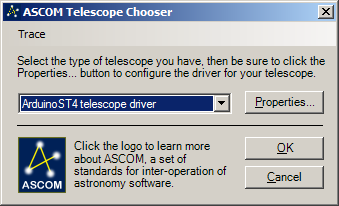
81 |
82 | If you couldn't find it, there was a problem with the driver installation.
83 | * Click on "Properties" to configure it
84 | * Put in com port the name of the port on which the arduino is connected
85 | * Modify if needed the different slewing rates in order to match the axis rates of the mount (multiple of sideral rate, 1X = earth rotation rate).
86 |
87 | 
88 |
89 | The default settings work fine for my EQ5 mount with the speed switch on the 8X position.
90 |
91 | Please note that RA+ and RA- value is not 8, this is because of the earth rotation. Your mount may compensate for this or not.
92 |
93 | Everything plugged in:
94 |
95 | 
96 |
97 | Video of the telescope slewing:
98 |
99 | [](http://www.youtube.com/watch?v=MwBNUDN8piQ)
100 |
101 |
102 | # Usage notes
103 | Autoguiding should work just fine.
104 |
105 | GOTO will be slow, going from andromeda to the pleiades takes 20 minutes with 8X speed. When searching for an object, it is faster to point the telescope to a known position that is close and to slew from there.
106 |
107 | If the polar alignment is good, GOTO will be precise enough. Most of the times, the object is right in the center of the eyepiece :)
108 |
109 | Stellarium does not support ASCOM out of the box, it is thus necessary to install an ASCOM<->Stellarium bridge like [Stellariumscope](http://welshdragoncomputing.ca/x/index.php/home/stellariumscope/download-stellariumscope).
110 | # Indi driver
111 | Thanks to Stephan for implementing a basic [indi driver](https://github.com/tliff/indi_ardust4) that can do autoguiding.
112 |
113 | # Todo
114 | * Write a complete [indi](http://www.indilib.org/) driver.
115 | * Cleanup ASCOM boilerplate (API had to be implemented through trial and error due to lack of details in documentation).
116 | * Test the driver on more configurations, especially windows 32 bits.
117 | * Implement a way to do a meridian flip (Easiest way would be to do it in the ASCOM driver)
118 |
119 | # License
120 | This project is licensed under the GNU LGPL v3
121 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Rates.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | using ASCOM.DeviceInterface;
17 | using System;
18 | using System.Collections;
19 | using System.Runtime.InteropServices;
20 |
21 | namespace ASCOM.ArduinoST4
22 | {
23 | #region Rate class
24 | //
25 | // The Rate class implements IRate, and is used to hold values
26 | // for AxisRates. You do not need to change this class.
27 | //
28 | // The Guid attribute sets the CLSID for ASCOM.ArduinoST4.Rate
29 | // The ClassInterface/None addribute prevents an empty interface called
30 | // _Rate from being created and used as the [default] interface
31 | //
32 | [Guid("a60ffd60-3725-4457-812e-49ace8613a81")]
33 | [ClassInterface(ClassInterfaceType.None)]
34 | [ComVisible(true)]
35 | public class Rate : ASCOM.DeviceInterface.IRate
36 | {
37 | private double maximum = 0;
38 | private double minimum = 0;
39 |
40 | internal Rate(double minimum, double maximum)
41 | {
42 | this.maximum = maximum;
43 | this.minimum = minimum;
44 | }
45 |
46 | #region Implementation of IRate
47 |
48 | public void Dispose()
49 | {
50 | throw new System.NotImplementedException();
51 | }
52 |
53 | public double Maximum
54 | {
55 | get { return this.maximum; }
56 | set { this.maximum = value; }
57 | }
58 |
59 | public double Minimum
60 | {
61 | get { return this.minimum; }
62 | set { this.minimum = value; }
63 | }
64 |
65 | #endregion
66 | }
67 | #endregion
68 |
69 | #region AxisRates
70 | //
71 | // AxisRates is a strongly-typed collection that must be enumerable by
72 | // both COM and .NET. The IAxisRates and IEnumerable interfaces provide
73 | // this polymorphism.
74 | //
75 | // The Guid attribute sets the CLSID for ASCOM.ArduinoST4.AxisRates
76 | // The ClassInterface/None addribute prevents an empty interface called
77 | // _AxisRates from being created and used as the [default] interface
78 | //
79 | [Guid("1f302d16-dd2d-49a4-af1a-992cf9599bc4")]
80 | [ClassInterface(ClassInterfaceType.None)]
81 | [ComVisible(true)]
82 | public class AxisRates : IAxisRates, IEnumerable
83 | {
84 | private readonly Rate[] rates;
85 |
86 | //
87 | // Constructor - Internal prevents public creation
88 | // of instances. Returned by Telescope.AxisRates.
89 | //
90 | internal AxisRates(TelescopeAxes axis)
91 | {
92 | switch (axis)
93 | {
94 | case TelescopeAxes.axisPrimary:
95 | this.rates = new Rate[] { new Rate(0, Constants.DEGREES_PER_SECOND * 8) };//8X Sideral Rate
96 | break;
97 | case TelescopeAxes.axisSecondary:
98 | this.rates = new Rate[] { new Rate(0, Constants.DEGREES_PER_SECOND * 8) };//8X Sideral Rate
99 | break;
100 | case TelescopeAxes.axisTertiary:
101 | this.rates = new Rate[] { new Rate(0, Constants.DEGREES_PER_SECOND * 8) };//8X Sideral Rate
102 | break;
103 | }
104 | }
105 |
106 | #region IAxisRates Members
107 |
108 | public int Count
109 | {
110 | get { return this.rates.Length; }
111 | }
112 |
113 | public void Dispose()
114 | {
115 | throw new System.NotImplementedException();
116 | }
117 |
118 | public IEnumerator GetEnumerator()
119 | {
120 | return rates.GetEnumerator();
121 | }
122 |
123 | public IRate this[int index]
124 | {
125 | get { return this.rates[index - 1]; } // 1-based
126 | }
127 |
128 | #endregion
129 | }
130 | #endregion
131 |
132 | #region TrackingRates
133 | //
134 | // TrackingRates is a strongly-typed collection that must be enumerable by
135 | // both COM and .NET. The ITrackingRates and IEnumerable interfaces provide
136 | // this polymorphism.
137 | //
138 | // The Guid attribute sets the CLSID for ASCOM.ArduinoST4.TrackingRates
139 | // The ClassInterface/None addribute prevents an empty interface called
140 | // _TrackingRates from being created and used as the [default] interface
141 | //
142 | [Guid("a544289a-d48d-44fc-8492-d911fcd6d3ef")]
143 | [ClassInterface(ClassInterfaceType.None)]
144 | [ComVisible(true)]
145 | public class TrackingRates : ITrackingRates, IEnumerable, IEnumerator
146 | {
147 | private readonly DriveRates[] trackingRates;
148 | private static int pos = -1;
149 |
150 | //
151 | // Default constructor - Internal prevents public creation
152 | // of instances. Returned by Telescope.AxisRates.
153 | //
154 | internal TrackingRates()
155 | {
156 | //
157 | // This array must hold ONE or more DriveRates values, indicating
158 | // the tracking rates supported by your telescope. The one value
159 | // (tracking rate) that MUST be supported is driveSidereal!
160 | //
161 | this.trackingRates = new[] { DriveRates.driveSidereal };
162 | // TODO Initialize this array with any additional tracking rates that your driver may provide
163 | }
164 |
165 | #region ITrackingRates Members
166 |
167 | public int Count
168 | {
169 | get { return this.trackingRates.Length; }
170 | }
171 |
172 | public IEnumerator GetEnumerator()
173 | {
174 | pos = -1;
175 | return this as IEnumerator;
176 | }
177 |
178 | public void Dispose()
179 | {
180 | throw new System.NotImplementedException();
181 | }
182 |
183 | public DriveRates this[int index]
184 | {
185 | get { return this.trackingRates[index - 1]; } // 1-based
186 | }
187 |
188 | #endregion
189 |
190 | #region IEnumerable members
191 |
192 | public object Current
193 | {
194 | get
195 | {
196 | if (pos < 0 || pos >= trackingRates.Length)
197 | {
198 | throw new System.InvalidOperationException();
199 | }
200 | return trackingRates[pos];
201 | }
202 | }
203 |
204 | public bool MoveNext()
205 | {
206 | if (++pos >= trackingRates.Length)
207 | {
208 | return false;
209 | }
210 | return true;
211 | }
212 |
213 | public void Reset()
214 | {
215 | pos = -1;
216 | }
217 | #endregion
218 | }
219 | #endregion
220 | }
221 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/ArduinoST4Driver.csproj:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 | Debug
5 | AnyCPU
6 | 9.0.30729
7 | 2.0
8 | {64308775-BD4A-469C-BCAB-3ED830B811AF}
9 | Library
10 | Properties
11 | ASCOM.ArduinoST4
12 | ASCOM.ArduinoST4.Telescope
13 |
14 |
15 |
16 |
17 | 3.5
18 | v4.0
19 | ASCOM.ico
20 | true
21 | ASCOMDriverTemplate.snk
22 | publish\
23 | true
24 | Disk
25 | false
26 | Foreground
27 | 7
28 | Days
29 | false
30 | false
31 | true
32 | 0
33 | 1.0.0.%2a
34 | false
35 | false
36 | true
37 | Client
38 |
39 |
40 | true
41 | full
42 | false
43 | bin\Debug\
44 | DEBUG;TRACE
45 | prompt
46 | 4
47 | true
48 | AnyCPU
49 | true
50 | true
51 |
52 |
53 | pdbonly
54 | true
55 | bin\Release\
56 | TRACE
57 | prompt
58 | 4
59 | AnyCPU
60 | false
61 |
62 |
63 | true
64 | bin\x86\Debug\
65 | CODE_ANALYSIS;DEBUG;TRACE
66 | true
67 | true
68 | full
69 | x86
70 | true
71 | prompt
72 | MinimumRecommendedRules.ruleset
73 |
74 |
75 | bin\x86\Release\
76 | TRACE
77 | true
78 | pdbonly
79 | x86
80 | prompt
81 | MinimumRecommendedRules.ruleset
82 |
83 |
84 |
85 |
86 |
87 |
88 |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 | 3.5
97 |
98 |
99 |
100 |
101 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 |
110 |
111 |
112 |
113 | True
114 | True
115 | Resources.resx
116 |
117 |
118 | True
119 | True
120 | Settings.settings
121 |
122 |
123 |
124 | Form
125 |
126 |
127 | SetupDialogForm.cs
128 |
129 |
130 |
131 |
132 | Designer
133 | ResXFileCodeGenerator
134 | Resources.Designer.cs
135 |
136 |
137 | SetupDialogForm.cs
138 | Designer
139 |
140 |
141 |
142 |
143 |
144 |
145 |
146 | SettingsSingleFileGenerator
147 | Settings.Designer.cs
148 |
149 |
150 |
151 |
152 |
153 |
154 | False
155 | .NET Framework 3.5 SP1 Client Profile
156 | false
157 |
158 |
159 | False
160 | .NET Framework 3.5 SP1
161 | true
162 |
163 |
164 | False
165 | Windows Installer 3.1
166 | true
167 |
168 |
169 |
170 |
171 |
172 |
173 |
174 |
181 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/AxisController.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | using ASCOM.Utilities;
17 | using System;
18 | using System.Threading;
19 |
20 | namespace ASCOM.ArduinoST4
21 | {
22 | ///
23 | /// Controls an axis.
24 | ///
25 | /// Responsible for telling the hardware to start and stop slewing.
26 | /// Keeps trace of the position while doing so.
27 | ///
28 | /// Can move the axis for a given amount of time or until a position is reached.
29 | ///
30 | /// Author: Kevin Ferrare
31 | class AxisController : IDisposable
32 | {
33 | private TraceLogger traceLogger;
34 |
35 | ///
36 | /// Axis controlled by this object
37 | ///
38 | private Axis axis;
39 |
40 | ///
41 | /// Helper to keep track of the position along the axis depending on the slew time
42 | ///
43 | private AxisMovementTracker axisMovementTracker;
44 |
45 | ///
46 | /// Actual hardware controller
47 | ///
48 | private DeviceController deviceController;
49 |
50 | ///
51 | /// Thread that will wait for axis to finish slewing asynchronously
52 | ///
53 | private Thread waitAndStopAsyncThread;
54 |
55 | ///
56 | /// Slew rate to use when moving in the MINUS orientation
57 | ///
58 | private double minusSlewRate;
59 |
60 | ///
61 | /// Slew rate to use when moving in the PLUS orientation
62 | ///
63 | private double plusSlewRate;
64 |
65 | ///
66 | /// Build an AxisPositionController object.
67 | ///
68 | ///
69 | /// Axis controlled by this object
70 | /// Actual hardware controller
71 | /// Slew rate to use when moving in the MINUS orientation
72 | /// Slew rate to use when moving in the PLUS orientation
73 | public AxisController(Axis axis, DeviceController deviceController, double minusSlewRate, double plusSlewRate)
74 | {
75 | this.traceLogger = new TraceLogger("", "ArduinoST4 AxisPositionController " + axis.ToString());
76 | this.traceLogger.Enabled = true;
77 | this.axis = axis;
78 | this.deviceController = deviceController;
79 | this.minusSlewRate = minusSlewRate;
80 | this.plusSlewRate = plusSlewRate;
81 | this.axisMovementTracker = new AxisMovementTracker();
82 | }
83 |
84 | ///
85 | /// Return the slew rate corresponding to the given orientation
86 | ///
87 | /// Orientation for which the slew rate is requested
88 | ///
89 | private double CalculateSlewRate(Orientation slewOrientation)
90 | {
91 | return slewOrientation == Orientation.PLUS ? this.plusSlewRate : this.minusSlewRate;
92 | }
93 |
94 | ///
95 | /// Return an orientation from the given positive or negative slew rate.
96 | ///
97 | /// Slew rate, eithe positive or negative
98 | ///
99 | private Orientation CalculateOrientation(double slewRate)
100 | {
101 | return slewRate > 0 ? Orientation.PLUS : Orientation.MINUS;
102 | }
103 |
104 | ///
105 | /// Whether the axis is currently moving or not
106 | ///
107 | public Boolean Moving
108 | {
109 | get
110 | {
111 | return SlewRate != 0;
112 | }
113 | }
114 |
115 | ///
116 | /// Current position of the axis
117 | ///
118 | public double Position
119 | {
120 | get
121 | {
122 | return this.axisMovementTracker.Position;
123 | }
124 | set
125 | {
126 | this.axisMovementTracker.Position = value;
127 | this.Log("Position Set", "New position is " + value);
128 | }
129 | }
130 |
131 | ///
132 | /// Current rate at which the axis is slewing, can be 0 if not moving
133 | ///
134 | public double SlewRate
135 | {
136 | get
137 | {
138 | return this.axisMovementTracker.SlewRate;
139 | }
140 | }
141 |
142 | ///
143 | /// Move the axis for the given time with the given orientation.
144 | /// If provided time is null or async is true, will not wait for the move to complete.
145 | ///
146 | /// Duration of the move, moves indefinitely if null
147 | /// Orientation to move the axis (+ or -)
148 | /// If true, will return without waiting for the move to complete
149 | ///
150 | protected void Move(TimeSpan? moveDuration, Orientation orientation, Boolean async)
151 | {
152 | this.Log("Move", "duration=" + (moveDuration == null ? "null" : moveDuration.ToString()) + ", orientation=" + orientation + ", async=" + async);
153 | //Stop any async move
154 | this.Log("Move", "Stopping any move");
155 | this.Stop();
156 | if (moveDuration != null && ((TimeSpan)moveDuration).TotalMilliseconds == 0)
157 | {
158 | this.Log("Move", "Nothing to do :)");
159 | //Nothing to do :)
160 | return;
161 | }
162 | //Tell the device to move
163 | this.deviceController.Move(this.axis, orientation);
164 | //Start tracking move position
165 | this.axisMovementTracker.Start(this.CalculateSlewRate(orientation));
166 | //Respect the duration if it has been specified
167 | if (moveDuration != null)
168 | {
169 | if (async)
170 | {
171 | this.WaitAndStopAsync((TimeSpan)moveDuration);
172 | }
173 | else
174 | {
175 | this.WaitAndStop((TimeSpan)moveDuration);
176 | }
177 | }
178 | }
179 |
180 | ///
181 | /// Move the axis with the given orientation.
182 | /// Return immediatly leaving the axis moving for as long as Stop or another move is not called.
183 | /// Orientation of the move
184 | ///
185 | public void Move(Orientation orientation)
186 | {
187 | this.Move(null, orientation);
188 | }
189 |
190 | ///
191 | /// Move the axis for the given duration with the given orientation.
192 | /// Return immediatly without waiting for the move to complete.
193 | /// Duration of the move
194 | /// Orientation of the move
195 | ///
196 | public void Move(TimeSpan? moveDuration, Orientation orientation)
197 | {
198 | this.Log("Move", "orientation=" + orientation);
199 | this.Move(moveDuration, orientation, true);
200 | }
201 |
202 | ///
203 | /// Move the axis until the position changes by the given positionDifference.
204 | /// Return immediatly without waiting for the move to complete.
205 | /// Value to add or remove to the current position
206 | ///
207 | public void Move(double positionDifference)
208 | {
209 | this.Log("Move", "positionDifference=" + positionDifference + ", currentPosition=" + this.Position);
210 | Orientation orientation = this.CalculateOrientation(positionDifference);
211 | double remainingTimeInSeconds = positionDifference / this.CalculateSlewRate(orientation);
212 | //Calculates the time difference to reach the given position
213 | TimeSpan time = TimeSpan.FromSeconds(remainingTimeInSeconds);
214 | this.Move(time, orientation, true);
215 | }
216 |
217 | ///
218 | /// Stop the hardware slew and aborts the waiting thread
219 | ///
220 | public void Stop()
221 | {
222 | if (this.waitAndStopAsyncThread != null && this.waitAndStopAsyncThread.IsAlive)
223 | {
224 | //Stops the waiting thread
225 | this.waitAndStopAsyncThread.Abort();
226 | this.waitAndStopAsyncThread = null;
227 | }
228 | this.StopMovement();
229 | }
230 |
231 | ///
232 | /// Wait for the axis to stop moving.
233 | /// Will return immediately if no asynchronous move is currently taking place.
234 | ///
235 | public void WaitAsyncMoveEnd()
236 | {
237 | if (this.waitAndStopAsyncThread != null && this.waitAndStopAsyncThread.IsAlive)
238 | {
239 | this.waitAndStopAsyncThread.Join();
240 | }
241 | }
242 | ///
243 | /// Wait the given amount of time, then stop the movement
244 | ///
245 | private void WaitAndStop(TimeSpan moveDuration)
246 | {
247 | Thread.Sleep(moveDuration);
248 | this.StopMovement();
249 | this.Log("WaitAndStop", "Waited for move to complete for " + moveDuration.ToString() + " sec, stopped. Current position is " + this.Position);
250 | }
251 |
252 | ///
253 | /// Stop the movement and the position tracking
254 | ///
255 | private void StopMovement()
256 | {
257 | //Stop the position tracking
258 | this.axisMovementTracker.Stop();
259 |
260 | //Stop the hardware movement
261 | this.deviceController.Move(this.axis, null);
262 | }
263 |
264 | ///
265 | /// Start a thread that will execute WaitAndStop so that the waiting can be done in background.
266 | /// Ensure that no other waiting thread for the axis is active before calling.
267 | ///
268 | private void WaitAndStopAsync(TimeSpan moveDuration)
269 | {
270 | this.Log("StartAsyncMove", "Starting async thread");
271 | this.waitAndStopAsyncThread = new Thread(
272 | delegate(object data)
273 | {
274 | WaitAndStop(moveDuration);
275 | }
276 | );
277 | this.waitAndStopAsyncThread.Start();
278 | }
279 |
280 | public void Dispose()
281 | {
282 | Stop();
283 | // Clean up the tracelogger and util objects
284 | traceLogger.Enabled = false;
285 | traceLogger.Dispose();
286 | traceLogger = null;
287 | }
288 |
289 | private void Log(String id, String message)
290 | {
291 | this.traceLogger.LogMessage(id + " " + this.axis.ToString(), message);
292 | }
293 | }
294 | }
295 |
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/SetupDialogForm.designer.cs:
--------------------------------------------------------------------------------
1 | namespace ASCOM.ArduinoST4
2 | {
3 | partial class SetupDialogForm
4 | {
5 | ///
6 | /// Required designer variable.
7 | ///
8 | private System.ComponentModel.IContainer components = null;
9 |
10 | ///
11 | /// Clean up any resources being used.
12 | ///
13 | /// true if managed resources should be disposed; otherwise, false.
14 | protected override void Dispose(bool disposing)
15 | {
16 | if (disposing && (components != null))
17 | {
18 | components.Dispose();
19 | }
20 | base.Dispose(disposing);
21 | }
22 |
23 | #region Windows Form Designer generated code
24 |
25 | ///
26 | /// Required method for Designer support - do not modify
27 | /// the contents of this method with the code editor.
28 | ///
29 | private void InitializeComponent()
30 | {
31 | this.cmdOK = new System.Windows.Forms.Button();
32 | this.cmdCancel = new System.Windows.Forms.Button();
33 | this.commentLabel = new System.Windows.Forms.Label();
34 | this.picASCOM = new System.Windows.Forms.PictureBox();
35 | this.comPortComboBox = new System.Windows.Forms.ComboBox();
36 | this.comPortLabel = new System.Windows.Forms.Label();
37 | this.traceStateCheckBox = new System.Windows.Forms.CheckBox();
38 | this.rightAscensionPlusSideralRateLabel = new System.Windows.Forms.Label();
39 | this.rightAscensionMinusSideralRateLabel = new System.Windows.Forms.Label();
40 | this.declinationPlusSideralRateLabel = new System.Windows.Forms.Label();
41 | this.declinationMinusSideralRateLabel = new System.Windows.Forms.Label();
42 | this.rightAscensionPlusSideralRateTextBox = new System.Windows.Forms.TextBox();
43 | this.rightAscensionMinusSideralRateTextBox = new System.Windows.Forms.TextBox();
44 | this.declinationPlusSideralRateTextBox = new System.Windows.Forms.TextBox();
45 | this.declinationMinusSideralRateTextBox = new System.Windows.Forms.TextBox();
46 | this.axisSideralRatesGroupBox = new System.Windows.Forms.GroupBox();
47 | this.axisSideralRatesPanel = new System.Windows.Forms.Panel();
48 | this.connectionGroupBox = new System.Windows.Forms.GroupBox();
49 | ((System.ComponentModel.ISupportInitialize)(this.picASCOM)).BeginInit();
50 | this.axisSideralRatesGroupBox.SuspendLayout();
51 | this.axisSideralRatesPanel.SuspendLayout();
52 | this.connectionGroupBox.SuspendLayout();
53 | this.SuspendLayout();
54 | //
55 | // cmdOK
56 | //
57 | this.cmdOK.Anchor = ((System.Windows.Forms.AnchorStyles)((System.Windows.Forms.AnchorStyles.Bottom | System.Windows.Forms.AnchorStyles.Right)));
58 | this.cmdOK.DialogResult = System.Windows.Forms.DialogResult.OK;
59 | this.cmdOK.Location = new System.Drawing.Point(281, 164);
60 | this.cmdOK.Name = "cmdOK";
61 | this.cmdOK.Size = new System.Drawing.Size(59, 24);
62 | this.cmdOK.TabIndex = 0;
63 | this.cmdOK.Text = "OK";
64 | this.cmdOK.UseVisualStyleBackColor = true;
65 | this.cmdOK.Click += new System.EventHandler(this.cmdOK_Click);
66 | //
67 | // cmdCancel
68 | //
69 | this.cmdCancel.Anchor = ((System.Windows.Forms.AnchorStyles)((System.Windows.Forms.AnchorStyles.Bottom | System.Windows.Forms.AnchorStyles.Right)));
70 | this.cmdCancel.DialogResult = System.Windows.Forms.DialogResult.Cancel;
71 | this.cmdCancel.Location = new System.Drawing.Point(281, 194);
72 | this.cmdCancel.Name = "cmdCancel";
73 | this.cmdCancel.Size = new System.Drawing.Size(59, 25);
74 | this.cmdCancel.TabIndex = 1;
75 | this.cmdCancel.Text = "Cancel";
76 | this.cmdCancel.UseVisualStyleBackColor = true;
77 | this.cmdCancel.Click += new System.EventHandler(this.cmdCancel_Click);
78 | //
79 | // commentLabel
80 | //
81 | this.commentLabel.Location = new System.Drawing.Point(12, 9);
82 | this.commentLabel.Name = "commentLabel";
83 | this.commentLabel.Size = new System.Drawing.Size(86, 17);
84 | this.commentLabel.TabIndex = 2;
85 | this.commentLabel.Text = "Driver setup";
86 | //
87 | // picASCOM
88 | //
89 | this.picASCOM.Anchor = ((System.Windows.Forms.AnchorStyles)((System.Windows.Forms.AnchorStyles.Top | System.Windows.Forms.AnchorStyles.Right)));
90 | this.picASCOM.Cursor = System.Windows.Forms.Cursors.Hand;
91 | this.picASCOM.Image = global::ASCOM.ArduinoST4.Properties.Resources.ASCOM;
92 | this.picASCOM.Location = new System.Drawing.Point(292, 9);
93 | this.picASCOM.Name = "picASCOM";
94 | this.picASCOM.Size = new System.Drawing.Size(48, 56);
95 | this.picASCOM.SizeMode = System.Windows.Forms.PictureBoxSizeMode.AutoSize;
96 | this.picASCOM.TabIndex = 3;
97 | this.picASCOM.TabStop = false;
98 | this.picASCOM.Click += new System.EventHandler(this.BrowseToAscom);
99 | this.picASCOM.DoubleClick += new System.EventHandler(this.BrowseToAscom);
100 | //
101 | // comPortTextBox
102 | //
103 | this.comPortComboBox.Location = new System.Drawing.Point(109, 10);
104 | this.comPortComboBox.Name = "comPortComboBox";
105 | this.comPortComboBox.Size = new System.Drawing.Size(82, 20);
106 | this.comPortComboBox.TabIndex = 4;
107 | //
108 | // comPortLabel
109 | //
110 | this.comPortLabel.AutoSize = true;
111 | this.comPortLabel.Location = new System.Drawing.Point(12, 16);
112 | this.comPortLabel.Name = "comPortLabel";
113 | this.comPortLabel.Size = new System.Drawing.Size(50, 13);
114 | this.comPortLabel.TabIndex = 5;
115 | this.comPortLabel.Text = "Com Port";
116 | //
117 | // traceStateCheckBox
118 | //
119 | this.traceStateCheckBox.AutoSize = true;
120 | this.traceStateCheckBox.Location = new System.Drawing.Point(12, 202);
121 | this.traceStateCheckBox.Name = "traceStateCheckBox";
122 | this.traceStateCheckBox.Size = new System.Drawing.Size(79, 17);
123 | this.traceStateCheckBox.TabIndex = 6;
124 | this.traceStateCheckBox.Text = "Debug Log";
125 | this.traceStateCheckBox.UseVisualStyleBackColor = true;
126 | //
127 | // rightAscensionPlusSideralRateLabel
128 | //
129 | this.rightAscensionPlusSideralRateLabel.AutoSize = true;
130 | this.rightAscensionPlusSideralRateLabel.Location = new System.Drawing.Point(6, 10);
131 | this.rightAscensionPlusSideralRateLabel.Name = "rightAscensionPlusSideralRateLabel";
132 | this.rightAscensionPlusSideralRateLabel.Size = new System.Drawing.Size(89, 13);
133 | this.rightAscensionPlusSideralRateLabel.TabIndex = 7;
134 | this.rightAscensionPlusSideralRateLabel.Text = "RA+ Sideral Rate";
135 | //
136 | // rightAscensionMinusSideralRateLabel
137 | //
138 | this.rightAscensionMinusSideralRateLabel.AutoSize = true;
139 | this.rightAscensionMinusSideralRateLabel.Location = new System.Drawing.Point(6, 35);
140 | this.rightAscensionMinusSideralRateLabel.Name = "rightAscensionMinusSideralRateLabel";
141 | this.rightAscensionMinusSideralRateLabel.Size = new System.Drawing.Size(86, 13);
142 | this.rightAscensionMinusSideralRateLabel.TabIndex = 8;
143 | this.rightAscensionMinusSideralRateLabel.Text = "RA- Sideral Rate";
144 | //
145 | // declinationPlusSideralRateLabel
146 | //
147 | this.declinationPlusSideralRateLabel.AutoSize = true;
148 | this.declinationPlusSideralRateLabel.Location = new System.Drawing.Point(6, 60);
149 | this.declinationPlusSideralRateLabel.Name = "declinationPlusSideralRateLabel";
150 | this.declinationPlusSideralRateLabel.Size = new System.Drawing.Size(96, 13);
151 | this.declinationPlusSideralRateLabel.TabIndex = 9;
152 | this.declinationPlusSideralRateLabel.Text = "DEC+ Sideral Rate";
153 | //
154 | // declinationMinusSideralRateLabel
155 | //
156 | this.declinationMinusSideralRateLabel.AutoSize = true;
157 | this.declinationMinusSideralRateLabel.Location = new System.Drawing.Point(6, 85);
158 | this.declinationMinusSideralRateLabel.Name = "declinationMinusSideralRateLabel";
159 | this.declinationMinusSideralRateLabel.Size = new System.Drawing.Size(93, 13);
160 | this.declinationMinusSideralRateLabel.TabIndex = 10;
161 | this.declinationMinusSideralRateLabel.Text = "DEC- Sideral Rate";
162 | //
163 | // rightAscensionPlusSideralRateTextBox
164 | //
165 | this.rightAscensionPlusSideralRateTextBox.Location = new System.Drawing.Point(103, 5);
166 | this.rightAscensionPlusSideralRateTextBox.Name = "rightAscensionPlusSideralRateTextBox";
167 | this.rightAscensionPlusSideralRateTextBox.Size = new System.Drawing.Size(82, 20);
168 | this.rightAscensionPlusSideralRateTextBox.TabIndex = 11;
169 | //
170 | // rightAscensionMinusSideralRateTextBox
171 | //
172 | this.rightAscensionMinusSideralRateTextBox.Location = new System.Drawing.Point(103, 30);
173 | this.rightAscensionMinusSideralRateTextBox.Name = "rightAscensionMinusSideralRateTextBox";
174 | this.rightAscensionMinusSideralRateTextBox.Size = new System.Drawing.Size(82, 20);
175 | this.rightAscensionMinusSideralRateTextBox.TabIndex = 12;
176 | //
177 | // declinationPlusSideralRateTextBox
178 | //
179 | this.declinationPlusSideralRateTextBox.Location = new System.Drawing.Point(103, 55);
180 | this.declinationPlusSideralRateTextBox.Name = "declinationPlusSideralRateTextBox";
181 | this.declinationPlusSideralRateTextBox.Size = new System.Drawing.Size(82, 20);
182 | this.declinationPlusSideralRateTextBox.TabIndex = 13;
183 | //
184 | // declinationMinusSideralRateTextBox
185 | //
186 | this.declinationMinusSideralRateTextBox.Location = new System.Drawing.Point(103, 80);
187 | this.declinationMinusSideralRateTextBox.Name = "declinationMinusSideralRateTextBox";
188 | this.declinationMinusSideralRateTextBox.Size = new System.Drawing.Size(82, 20);
189 | this.declinationMinusSideralRateTextBox.TabIndex = 14;
190 | //
191 | // axisSideralRatesGroupBox
192 | //
193 | this.axisSideralRatesGroupBox.Controls.Add(this.axisSideralRatesPanel);
194 | this.axisSideralRatesGroupBox.Location = new System.Drawing.Point(12, 71);
195 | this.axisSideralRatesGroupBox.Name = "axisSideralRatesGroupBox";
196 | this.axisSideralRatesGroupBox.Size = new System.Drawing.Size(203, 123);
197 | this.axisSideralRatesGroupBox.TabIndex = 15;
198 | this.axisSideralRatesGroupBox.TabStop = false;
199 | this.axisSideralRatesGroupBox.Text = "Axis Sideral Rates";
200 | //
201 | // axisSideralRatesPanel
202 | //
203 | this.axisSideralRatesPanel.Controls.Add(this.rightAscensionPlusSideralRateLabel);
204 | this.axisSideralRatesPanel.Controls.Add(this.declinationMinusSideralRateTextBox);
205 | this.axisSideralRatesPanel.Controls.Add(this.rightAscensionPlusSideralRateTextBox);
206 | this.axisSideralRatesPanel.Controls.Add(this.declinationMinusSideralRateLabel);
207 | this.axisSideralRatesPanel.Controls.Add(this.declinationPlusSideralRateTextBox);
208 | this.axisSideralRatesPanel.Controls.Add(this.rightAscensionMinusSideralRateLabel);
209 | this.axisSideralRatesPanel.Controls.Add(this.rightAscensionMinusSideralRateTextBox);
210 | this.axisSideralRatesPanel.Controls.Add(this.declinationPlusSideralRateLabel);
211 | this.axisSideralRatesPanel.Location = new System.Drawing.Point(6, 13);
212 | this.axisSideralRatesPanel.Name = "axisSideralRatesPanel";
213 | this.axisSideralRatesPanel.Size = new System.Drawing.Size(188, 105);
214 | this.axisSideralRatesPanel.TabIndex = 16;
215 | //
216 | // connectionGroupBox
217 | //
218 | this.connectionGroupBox.Controls.Add(this.comPortLabel);
219 | this.connectionGroupBox.Controls.Add(this.comPortComboBox);
220 | this.connectionGroupBox.Location = new System.Drawing.Point(15, 29);
221 | this.connectionGroupBox.Name = "connectionGroupBox";
222 | this.connectionGroupBox.Size = new System.Drawing.Size(200, 36);
223 | this.connectionGroupBox.TabIndex = 16;
224 | this.connectionGroupBox.TabStop = false;
225 | this.connectionGroupBox.Text = "Connection";
226 | //
227 | // SetupDialogForm
228 | //
229 | this.AutoScaleDimensions = new System.Drawing.SizeF(6F, 13F);
230 | this.AutoScaleMode = System.Windows.Forms.AutoScaleMode.Font;
231 | this.ClientSize = new System.Drawing.Size(350, 227);
232 | this.Controls.Add(this.connectionGroupBox);
233 | this.Controls.Add(this.axisSideralRatesGroupBox);
234 | this.Controls.Add(this.traceStateCheckBox);
235 | this.Controls.Add(this.picASCOM);
236 | this.Controls.Add(this.commentLabel);
237 | this.Controls.Add(this.cmdCancel);
238 | this.Controls.Add(this.cmdOK);
239 | this.FormBorderStyle = System.Windows.Forms.FormBorderStyle.FixedDialog;
240 | this.MaximizeBox = false;
241 | this.MinimizeBox = false;
242 | this.Name = "SetupDialogForm";
243 | this.SizeGripStyle = System.Windows.Forms.SizeGripStyle.Hide;
244 | this.StartPosition = System.Windows.Forms.FormStartPosition.CenterScreen;
245 | this.Text = "ArduinoST4 Setup";
246 | this.Load += new System.EventHandler(this.SetupDialogForm_Load);
247 | ((System.ComponentModel.ISupportInitialize)(this.picASCOM)).EndInit();
248 | this.axisSideralRatesGroupBox.ResumeLayout(false);
249 | this.axisSideralRatesPanel.ResumeLayout(false);
250 | this.axisSideralRatesPanel.PerformLayout();
251 | this.connectionGroupBox.ResumeLayout(false);
252 | this.connectionGroupBox.PerformLayout();
253 | this.ResumeLayout(false);
254 | this.PerformLayout();
255 |
256 | }
257 |
258 | #endregion
259 |
260 | private System.Windows.Forms.Button cmdOK;
261 | private System.Windows.Forms.Button cmdCancel;
262 | private System.Windows.Forms.Label commentLabel;
263 | private System.Windows.Forms.PictureBox picASCOM;
264 | private System.Windows.Forms.ComboBox comPortComboBox;
265 | private System.Windows.Forms.Label comPortLabel;
266 | private System.Windows.Forms.CheckBox traceStateCheckBox;
267 | private System.Windows.Forms.Label rightAscensionPlusSideralRateLabel;
268 | private System.Windows.Forms.Label rightAscensionMinusSideralRateLabel;
269 | private System.Windows.Forms.Label declinationPlusSideralRateLabel;
270 | private System.Windows.Forms.Label declinationMinusSideralRateLabel;
271 | private System.Windows.Forms.TextBox rightAscensionPlusSideralRateTextBox;
272 | private System.Windows.Forms.TextBox rightAscensionMinusSideralRateTextBox;
273 | private System.Windows.Forms.TextBox declinationPlusSideralRateTextBox;
274 | private System.Windows.Forms.TextBox declinationMinusSideralRateTextBox;
275 | private System.Windows.Forms.GroupBox axisSideralRatesGroupBox;
276 | private System.Windows.Forms.Panel axisSideralRatesPanel;
277 | private System.Windows.Forms.GroupBox connectionGroupBox;
278 | }
279 | }
--------------------------------------------------------------------------------
/ASCOMDriver/ArduinoST4Driver/ArduinoST4Driver/Driver.cs:
--------------------------------------------------------------------------------
1 | // This file is part of Arduino ST4.
2 | //
3 | // Arduino ST4 is free software: you can redistribute it and/or modify
4 | // it under the terms of the GNU Lesser General Public License as published by
5 | // the Free Software Foundation, either version 3 of the License, or
6 | // (at your option) any later version.
7 | //
8 | // Arduino ST4 is distributed in the hope that it will be useful,
9 | // but WITHOUT ANY WARRANTY; without even the implied warranty of
10 | // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
11 | // GNU Lesser General Public License for more details.
12 | //
13 | // You should have received a copy of the GNU Lesser General Public License
14 | // along with Arduino ST4. If not, see .
15 |
16 | // ASCOM Telescope driver for ArduinoST4
17 | //
18 | // Description: Driver for an USB-ST4 interface implemented with an arduino.
19 | // Pulse guiding and slew is supported, allowing for very slow goto :)
20 | //
21 | // Implements: ASCOM Telescope interface version:
22 | // Author: (Kevin FERRARE) kevinferrare@gmail.com
23 |
24 | using ASCOM.DeviceInterface;
25 | using ASCOM.Utilities;
26 | using System;
27 | using System.Collections;
28 | using System.Globalization;
29 | using System.Runtime.InteropServices;
30 |
31 | namespace ASCOM.ArduinoST4
32 | {
33 | ///
34 | /// ASCOM Telescope Driver for ArduinoST4.
35 | /// A big part of the code in this class is autogenerated boilerplate for ASCOM API.
36 | /// Real logic is under AxisPositionController.
37 | ///
38 | /// GUID is for COM identification of the component.
39 | /// ClassInterface is to make it invisible to other COM clients.
40 | ///
41 | /// Author: Kevin Ferrare
42 | [Guid("045b2ced-6f70-4a3a-8483-1891f235deb1")]
43 | [ClassInterface(ClassInterfaceType.None)]
44 | public class Telescope : ITelescopeV3, IDisposable
45 | {
46 | ///
47 | /// ASCOM DeviceID (COM ProgID) for this driver.
48 | /// The DeviceID is used by ASCOM applications to load the driver at runtime.
49 | ///
50 | internal static string driverID = "ASCOM.ArduinoST4.Telescope";
51 |
52 | ///
53 | /// Driver description that displays in the ASCOM Chooser.
54 | ///
55 | private static string driverDescription = "ArduinoST4 telescope driver";
56 |
57 | ///
58 | /// Right ascension and declination speed of the device in sideral multiple (earth rotation multiple)
59 | ///
60 | internal static double rightAscensionSideralRatePlus = 9;//8X Sideral Rate + 1 for earth rotation
61 | internal static double rightAscensionSideralRateMinus = 7;//8X Sideral Rate - 1 for earth rotation
62 | internal static double declinationSideralRatePlus = 8;
63 | internal static double declinationSideralRateMinus = 8;
64 |
65 | ///
66 | /// COM port for arduino access
67 | ///
68 | internal static string comPort = "";
69 |
70 | ///
71 | /// Enable logging
72 | ///
73 | internal static bool traceState = false;
74 |
75 | ///
76 | /// ASCOM Utilities object, used only to calculate dates
77 | ///
78 | private Util utilities = new Util();
79 |
80 | ///
81 | /// Logger
82 | ///
83 | private TraceLogger traceLogger;
84 |
85 | ///
86 | /// Handles the communication with the arduino
87 | ///
88 | private DeviceController deviceController;
89 |
90 | ///
91 | /// Target position
92 | ///
93 | private double? targetRightAscension;
94 | private double? targetDeclination;
95 |
96 | ///
97 | /// Controller for each axis, talks with the device controller to start / stop movement, keeps track of the position while doing so
98 | ///
99 | private AxisController[] axisControllers;
100 |
101 | public Telescope()
102 | {
103 | // Read device configuration from the ASCOM Profile store
104 | ReadProfile();
105 |
106 | traceLogger = new TraceLogger("", "ArduinoST4");
107 | traceLogger.Enabled = traceState;
108 | traceLogger.LogMessage("Telescope", "Starting initialisation");
109 |
110 | deviceController = new DeviceController();
111 |
112 | //Setup the axes
113 | axisControllers = new AxisController[2];
114 | axisControllers[(int)Axis.RA] = new AxisController(Axis.RA, this.deviceController, -Constants.RA_PER_SECOND * rightAscensionSideralRateMinus, Constants.RA_PER_SECOND * rightAscensionSideralRatePlus);
115 | axisControllers[(int)Axis.DEC] = new AxisController(Axis.DEC, this.deviceController, -Constants.DEGREES_PER_SECOND * declinationSideralRateMinus, Constants.DEGREES_PER_SECOND * declinationSideralRatePlus);
116 | traceLogger.LogMessage("Telescope", "Completed initialisation");
117 | }
118 |
119 |
120 | #region Common properties and methods.
121 |
122 | ///
123 | /// Displays the Setup Dialog form.
124 | /// If the user clicks the OK button to dismiss the form, then
125 | /// the new settings are saved, otherwise the old values are reloaded.
126 | /// THIS IS THE ONLY PLACE WHERE SHOWING USER INTERFACE IS ALLOWED!
127 | ///
128 | public void SetupDialog()
129 | {
130 | // Only show the setup dialog if not connected
131 | if (this.deviceController.Connected)
132 | {
133 | System.Windows.Forms.MessageBox.Show("Already connected, just press OK");
134 | return;
135 | }
136 |
137 | using (SetupDialogForm setupDialogForm = new SetupDialogForm())
138 | {
139 | var result = setupDialogForm.ShowDialog();
140 | if (result == System.Windows.Forms.DialogResult.OK)
141 | {
142 | WriteProfile(); // Persist device configuration values to the ASCOM Profile store
143 | }
144 | }
145 | }
146 |
147 | public void CommandBlind(string command, bool raw)
148 | {
149 | CheckConnected("CommandBlind");
150 | // Call CommandString and return as soon as it finishes
151 | this.CommandString(command, raw);
152 | }
153 |
154 | public bool CommandBool(string command, bool raw)
155 | {
156 | CheckConnected("CommandBool");
157 | return deviceController.CommandBool(command);
158 | }
159 |
160 | public string CommandString(string command, bool raw)
161 | {
162 | CheckConnected("CommandString");
163 | return deviceController.CommandString(command);
164 | }
165 |
166 | public bool Connected
167 | {
168 | get
169 | {
170 | traceLogger.LogMessage("Connected Get", this.deviceController.Connected.ToString());
171 | return this.deviceController.Connected;
172 | }
173 | set
174 | {
175 | traceLogger.LogMessage("Connected Set", value.ToString());
176 | if (value == this.deviceController.Connected)
177 | {
178 | return;
179 | }
180 | if (value)
181 | {
182 | this.deviceController.Connect(comPort);
183 | }
184 | else
185 | {
186 | this.deviceController.Disconnect();
187 | }
188 | }
189 | }
190 |
191 | public string Description
192 | {
193 | get
194 | {
195 | traceLogger.LogMessage("Description Get", driverDescription);
196 | return driverDescription;
197 | }
198 | }
199 |
200 | public string DriverInfo
201 | {
202 | get
203 | {
204 | Version version = System.Reflection.Assembly.GetExecutingAssembly().GetName().Version;
205 | string driverInfo = "Information about the driver itself. Version: " + DriverVersion;
206 | traceLogger.LogMessage("DriverInfo Get", driverInfo);
207 | return driverInfo;
208 | }
209 | }
210 |
211 | public string DriverVersion
212 | {
213 | get
214 | {
215 | Version version = System.Reflection.Assembly.GetExecutingAssembly().GetName().Version;
216 | string driverVersion = String.Format(CultureInfo.InvariantCulture, "{0}.{1}", version.Major, version.Minor);
217 | traceLogger.LogMessage("DriverVersion Get", driverVersion);
218 | return driverVersion;
219 | }
220 | }
221 |
222 | public short InterfaceVersion
223 | {
224 | // set by the driver wizard
225 | get
226 | {
227 | traceLogger.LogMessage("InterfaceVersion Get", "3");
228 | return 3;
229 | }
230 | }
231 |
232 | public string Name
233 | {
234 | get
235 | {
236 | string name = "ArduinoST4";
237 | traceLogger.LogMessage("Name Get", name);
238 | return name;
239 | }
240 | }
241 |
242 | #endregion
243 |
244 | #region ITelescope Implementation
245 | public void AbortSlew()
246 | {
247 | axisControllers[(int)Axis.RA].Stop();
248 | axisControllers[(int)Axis.DEC].Stop();
249 | }
250 |
251 | public AlignmentModes AlignmentMode
252 | {
253 | get
254 | {
255 | return AlignmentModes.algGermanPolar;
256 | }
257 | }
258 |
259 | public IAxisRates AxisRates(TelescopeAxes axis)
260 | {
261 | traceLogger.LogMessage("AxisRates", "Get - " + axis.ToString());
262 | return new AxisRates(axis);
263 | }
264 |
265 | #region Capabilities
266 | public bool CanMoveAxis(TelescopeAxes axis)
267 | {
268 | traceLogger.LogMessage("CanMoveAxis", "Get - " + axis.ToString());
269 | switch (axis)
270 | {
271 | case TelescopeAxes.axisPrimary: return true;
272 | case TelescopeAxes.axisSecondary: return true;
273 | case TelescopeAxes.axisTertiary: return false;
274 | default: throw new InvalidValueException("CanMoveAxis", axis.ToString(), "0 to 2");
275 | }
276 | }
277 |
278 | public bool CanPulseGuide
279 | {
280 | get
281 | {
282 | traceLogger.LogMessage("CanPulseGuide", "Get - " + true.ToString());
283 | return true;
284 | }
285 | }
286 |
287 | public bool CanSetGuideRates
288 | {
289 | get
290 | {
291 | traceLogger.LogMessage("CanSetGuideRates", "Get - " + false.ToString());
292 | return false;
293 | }
294 | }
295 |
296 | public bool CanSlew
297 | {
298 | get
299 | {
300 | traceLogger.LogMessage("CanSlew", "Get - " + true.ToString());
301 | return true;
302 | }
303 | }
304 |
305 | public bool CanSlewAsync
306 | {
307 | get
308 | {
309 | traceLogger.LogMessage("CanSlewAsync", "Get - " + true.ToString());
310 | return true;
311 | }
312 | }
313 |
314 | public bool CanSync
315 | {
316 | get
317 | {
318 | traceLogger.LogMessage("CanSync", "Get - " + true.ToString());
319 | return true;
320 | }
321 | }
322 |
323 | public bool CanFindHome
324 | {
325 | get
326 | {
327 | //No feedback on position=> cannot find home
328 | traceLogger.LogMessage("CanFindHome", "Get - " + false.ToString());
329 | return false;
330 | }
331 | }
332 |
333 | public bool CanPark
334 | {
335 | get
336 | {
337 | //No feedback on position=> cannot park
338 | traceLogger.LogMessage("CanPark", "Get - " + false.ToString());
339 | return false;
340 | }
341 | }
342 |
343 | public bool CanSetDeclinationRate
344 | {
345 | get
346 | {
347 | traceLogger.LogMessage("CanSetDeclinationRate", "Get - " + false.ToString());
348 | return false;
349 | }
350 | }
351 |
352 | public bool CanSetPark
353 | {
354 | get
355 | {
356 | traceLogger.LogMessage("CanSetPark", "Get - " + false.ToString());
357 | return false;
358 | }
359 | }
360 |
361 | public bool CanSetPierSide
362 | {
363 | get
364 | {
365 | traceLogger.LogMessage("CanSetPierSide", "Get - " + false.ToString());
366 | return false;
367 | }
368 | }
369 |
370 | public bool CanSetRightAscensionRate
371 | {
372 | get
373 | {
374 | traceLogger.LogMessage("CanSetRightAscensionRate", "Get - " + false.ToString());
375 | return false;
376 | }
377 | }
378 |
379 | public bool CanSetTracking
380 | {
381 | get
382 | {
383 | traceLogger.LogMessage("CanSetTracking", "Get - " + false.ToString());
384 | return false;
385 | }
386 | }
387 |
388 |
389 | public bool CanSlewAltAz
390 | {
391 | get
392 | {
393 | traceLogger.LogMessage("CanSlewAltAz", "Get - " + false.ToString());
394 | return false;
395 | }
396 | }
397 |
398 | public bool CanSlewAltAzAsync
399 | {
400 | get
401 | {
402 | traceLogger.LogMessage("CanSlewAltAzAsync", "Get - " + false.ToString());
403 | return false;
404 | }
405 | }
406 |
407 | public bool CanSyncAltAz
408 | {
409 | get
410 | {
411 | traceLogger.LogMessage("CanSyncAltAz", "Get - " + false.ToString());
412 | return false;
413 | }
414 | }
415 |
416 | public bool CanUnpark
417 | {
418 | get
419 | {
420 | traceLogger.LogMessage("CanUnpark", "Get - " + false.ToString());
421 | return false;
422 | }
423 | }
424 |
425 | #endregion
426 |
427 |
428 | public double Declination
429 | {
430 | get
431 | {
432 | return axisControllers[(int)Axis.DEC].Position;
433 | }
434 | }
435 |
436 | public EquatorialCoordinateType EquatorialSystem
437 | {
438 | get
439 | {
440 | EquatorialCoordinateType equatorialSystem = EquatorialCoordinateType.equLocalTopocentric;
441 | traceLogger.LogMessage("DeclinationRate", "Get - " + equatorialSystem.ToString());
442 | return equatorialSystem;
443 | }
444 | }
445 |
446 | public double GuideRateDeclination
447 | {
448 | get
449 | {
450 | return axisControllers[(int)Axis.DEC].SlewRate;
451 | }
452 | set
453 | {
454 | traceLogger.LogMessage("GuideRateDeclination Set", "Not implemented");
455 | throw new ASCOM.PropertyNotImplementedException("GuideRateDeclination", true);
456 | }
457 | }
458 |
459 | public double GuideRateRightAscension
460 | {
461 | get
462 | {
463 | return axisControllers[(int)Axis.RA].SlewRate;
464 | }
465 | set
466 | {
467 | traceLogger.LogMessage("GuideRateRightAscension Set", "Not implemented");
468 | throw new ASCOM.PropertyNotImplementedException("GuideRateRightAscension", true);
469 | }
470 | }
471 |
472 | public bool IsPulseGuiding
473 | {
474 | get
475 | {
476 | return this.Moving;
477 | }
478 | }
479 |
480 | public void MoveAxis(TelescopeAxes telescopeAxis, double rate)
481 | {
482 | traceLogger.LogMessage("MoveAxis", "TelescopeAxis - " + telescopeAxis.ToString() + "Rate - " + rate.ToString());
483 | //Some checks on given values for API conformity
484 | if (telescopeAxis == TelescopeAxes.axisTertiary)
485 | {
486 | throw new ASCOM.InvalidValueException("TelescopeAxes", telescopeAxis.ToString(), "No ternary axis on ST-4");
487 | }
488 | IRate axisRate = this.AxisRates(telescopeAxis)[1];
489 | if (Math.Abs(rate) > axisRate.Maximum || Math.Abs(rate) < axisRate.Minimum)
490 | {
491 | throw new ASCOM.InvalidValueException("AxisRate", rate.ToString(), axisRate.Minimum + ".." + axisRate.Maximum);
492 | }
493 |
494 | Orientation orientation = rate > 0 ? Orientation.PLUS : Orientation.MINUS;
495 | Axis axis = telescopeAxis == TelescopeAxes.axisPrimary ? Axis.RA : Axis.DEC;
496 | AxisController axisPositionController = axisControllers[(int)axis];
497 | if (rate == 0)
498 | {
499 | axisPositionController.Stop();
500 | }
501 | else
502 | {
503 | axisPositionController.Move(orientation);
504 | }
505 | }
506 |
507 |
508 | public void PulseGuide(GuideDirections direction, int duration)
509 | {
510 | traceLogger.LogMessage("PulseGuide", "Direction - " + direction.ToString() + "Duration - " + duration.ToString());
511 | //Duration in milliseconds
512 | TimeSpan moveDuration = TimeSpan.FromMilliseconds(duration);
513 | switch (direction)
514 | {
515 | case GuideDirections.guideEast:
516 | axisControllers[(int)Axis.RA].Move(moveDuration, Orientation.PLUS);
517 | break;
518 | case GuideDirections.guideWest:
519 | axisControllers[(int)Axis.RA].Move(moveDuration, Orientation.MINUS);
520 | break;
521 | case GuideDirections.guideNorth:
522 | axisControllers[(int)Axis.DEC].Move(moveDuration, Orientation.PLUS);
523 | break;
524 | case GuideDirections.guideSouth:
525 | axisControllers[(int)Axis.DEC].Move(moveDuration, Orientation.MINUS);
526 | break;
527 | }
528 | }
529 |
530 | public double RightAscension
531 | {
532 | get
533 | {
534 | double rightAscension = axisControllers[(int)Axis.RA].Position;
535 | rightAscension = (rightAscension % 24 + 24) % 24;//Ensure that RA is always positive and between 0 and 24
536 | return rightAscension;
537 | }
538 | }
539 |
540 | public double SiderealTime
541 | {
542 | get
543 | {
544 | double siderealTime = (18.697374558 + 24.065709824419081 * (utilities.DateLocalToJulian(DateTime.Now) - 2451545.0)) % 24.0;
545 | traceLogger.LogMessage("SiderealTime", "Get - " + siderealTime.ToString());
546 | return siderealTime;
547 | }
548 | }
549 |
550 | public void SlewToCoordinates(double rightAscension, double declination)
551 | {
552 | traceLogger.LogMessage("SlewToCoordinatesAsync", "RightAscension=" + rightAscension.ToString() + ", Declination=" + declination.ToString());
553 | SlewToCoordinatesAsync(rightAscension, declination);
554 | //Wait for both axes to finish
555 | this.axisControllers[(int)Axis.RA].WaitAsyncMoveEnd();
556 | this.axisControllers[(int)Axis.DEC].WaitAsyncMoveEnd();
557 | }
558 |
559 | public void SlewToCoordinatesAsync(double rightAscension, double declination)
560 | {
561 | traceLogger.LogMessage("SlewToCoordinatesAsync", "RightAscension=" + rightAscension.ToString() + ", Declination=" + declination.ToString() + " (current position ra=" + this.RightAscension + ", dec=" + this.Declination);
562 | double rightAscensionDelta = rightAscension - this.RightAscension;
563 | if (rightAscensionDelta < -12)
564 | {
565 | //Shortest path from 24 to 0
566 | rightAscensionDelta += 24;
567 | }
568 | else if (rightAscensionDelta > 12)
569 | {
570 | //Shortest path from 0 to 24
571 | rightAscensionDelta -= 24;
572 | }
573 | traceLogger.LogMessage("SlewToCoordinatesAsync", "RightAscension delta =" + rightAscensionDelta.ToString());
574 | double declinationDelta = declination - this.Declination;
575 | this.axisControllers[(int)Axis.RA].Move(rightAscensionDelta);
576 | this.axisControllers[(int)Axis.DEC].Move(declinationDelta);
577 | }
578 |
579 | public void SlewToTarget()
580 | {
581 | SlewToCoordinates(TargetRightAscension, TargetDeclination);
582 | }
583 |
584 | public void SlewToTargetAsync()
585 | {
586 | SlewToCoordinatesAsync(TargetRightAscension, TargetDeclination);
587 | }
588 |
589 | public bool Slewing
590 | {
591 | get
592 | {
593 | // Slewing and pulse guiding are the same for the hardware
594 | return IsPulseGuiding;
595 | }
596 | }
597 |
598 | public void SyncToCoordinates(double rightAscension, double declination)
599 | {
600 | axisControllers[(int)Axis.RA].Position = rightAscension;
601 | axisControllers[(int)Axis.DEC].Position = declination;
602 | }
603 |
604 | public void SyncToTarget()
605 | {
606 | SyncToCoordinates(TargetRightAscension, TargetDeclination);
607 | }
608 |
609 | public double TargetDeclination
610 | {
611 | get
612 | {
613 | if (this.targetDeclination == null)
614 | {
615 | throw new ASCOM.ValueNotSetException("TargetDeclination");
616 | }
617 | return (double)this.targetDeclination;
618 | }
619 | set
620 | {
621 | if (value < -90 || value > 90)
622 | {
623 | throw new ASCOM.InvalidValueException("TargetDeclination", value.ToString(), "-90..90");
624 | }
625 | this.targetDeclination = value;
626 | }
627 | }
628 |
629 | public double TargetRightAscension
630 | {
631 | get
632 | {
633 | if (this.targetRightAscension == null)
634 | {
635 | throw new ASCOM.ValueNotSetException("TargetRightAscension");
636 | }
637 | return (double)this.targetRightAscension;
638 | }
639 | set
640 | {
641 | if (value < 0 || value > 24)
642 | {
643 | throw new InvalidValueException("TargetRightAscension", value.ToString(), "0..24");
644 | }
645 | this.targetRightAscension = value;
646 | }
647 | }
648 |
649 | public bool Tracking
650 | {
651 | get
652 | {
653 | //EQ5 is always tracking when motors are on
654 | bool tracking = !this.Moving;
655 | traceLogger.LogMessage("Tracking Get", tracking.ToString());
656 | return tracking;
657 | }
658 | set
659 | {
660 | traceLogger.LogMessage("Tracking Set", "Not implemented");
661 | throw new ASCOM.PropertyNotImplementedException("Tracking", false);
662 | }
663 | }
664 |
665 | public DriveRates TrackingRate
666 | {
667 | get
668 | {
669 | return DriveRates.driveSidereal;
670 | }
671 | set
672 | {
673 | }
674 | }
675 |
676 | public ITrackingRates TrackingRates
677 | {
678 | get
679 | {
680 | traceLogger.LogMessage("TrackingRates", "Get - ");
681 | return new TrackingRates();
682 | }
683 | }
684 |
685 | public DateTime UTCDate
686 | {
687 | get
688 | {
689 | return DateTime.UtcNow;
690 | }
691 | set
692 | {
693 | }
694 | }
695 |
696 | #endregion
697 |
698 | #region Helpers
699 |
700 | #region ASCOM Registration
701 |
702 | // Register or unregister driver for ASCOM. This is harmless if already
703 | // registered or unregistered.
704 | //
705 | ///
706 | /// Register or unregister the driver with the ASCOM Platform.
707 | /// This is harmless if the driver is already registered/unregistered.
708 | ///
709 | /// If true, registers the driver, otherwise unregisters it.
710 | private static void RegUnregASCOM(bool register)
711 | {
712 | using (var profile = new ASCOM.Utilities.Profile())
713 | {
714 | profile.DeviceType = "Telescope";
715 | if (register)
716 | {
717 | profile.Register(driverID, driverDescription);
718 | }
719 | else
720 | {
721 | profile.Unregister(driverID);
722 | }
723 | }
724 | }
725 |
726 | ///
727 | /// This function registers the driver with the ASCOM Chooser and
728 | /// is called automatically whenever this class is registered for COM Interop.
729 | ///
730 | /// Type of the class being registered, not used.
731 | ///
732 | /// This method typically runs in two distinct situations:
733 | ///
734 | /// -
735 | /// In Visual Studio, when the project is successfully built.
736 | /// For this to work correctly, the option Register for COM Interop
737 | /// must be enabled in the project settings.
738 | ///
739 | /// - During setup, when the installer registers the assembly for COM Interop.
740 | ///
741 | /// This technique should mean that it is never necessary to manually register a driver with ASCOM.
742 | ///
743 | [ComRegisterFunction]
744 | public static void RegisterASCOM(Type t)
745 | {
746 | RegUnregASCOM(true);
747 | }
748 |
749 | ///
750 | /// This function unregisters the driver from the ASCOM Chooser and
751 | /// is called automatically whenever this class is unregistered from COM Interop.
752 | ///
753 | /// Type of the class being registered, not used.
754 | ///
755 | /// This method typically runs in two distinct situations:
756 | ///
757 | /// -
758 | /// In Visual Studio, when the project is cleaned or prior to rebuilding.
759 | /// For this to work correctly, the option Register for COM Interop
760 | /// must be enabled in the project settings.
761 | ///
762 | /// - During uninstall, when the installer unregisters the assembly from COM Interop.
763 | ///
764 | /// This technique should mean that it is never necessary to manually unregister a driver from ASCOM.
765 | ///
766 | [ComUnregisterFunction]
767 | public static void UnregisterASCOM(Type t)
768 | {
769 | RegUnregASCOM(false);
770 | }
771 |
772 | #endregion
773 |
774 | ///
775 | /// Throws an exception if not connected to the hardware
776 | ///
777 | ///
778 | private void CheckConnected(string message)
779 | {
780 | if (!this.deviceController.Connected)
781 | {
782 | throw new ASCOM.NotConnectedException(message);
783 | }
784 | }
785 |
786 | ///
787 | /// Read the device configuration from the ASCOM Profile store
788 | ///
789 | internal void ReadProfile()
790 | {
791 | using (Profile driverProfile = new Profile())
792 | {
793 | driverProfile.DeviceType = "Telescope";
794 | traceState = ReadBoolFromProfile(driverProfile, "traceState", traceState);
795 | comPort = ReadStringFromProfile(driverProfile, "comPort", comPort);
796 | rightAscensionSideralRatePlus = ReadDoubleFromProfile(driverProfile, "rightAscensionSideralRatePlus", rightAscensionSideralRatePlus);
797 | rightAscensionSideralRateMinus = ReadDoubleFromProfile(driverProfile, "rightAscensionSideralRateMinus", rightAscensionSideralRateMinus);
798 | declinationSideralRatePlus = ReadDoubleFromProfile(driverProfile, "declinationSideralRatePlus", declinationSideralRatePlus);
799 | declinationSideralRateMinus = ReadDoubleFromProfile(driverProfile, "declinationSideralRateMinus", declinationSideralRateMinus);
800 | }
801 | }
802 |
803 | internal bool ReadBoolFromProfile(Profile driverProfile, String profileName, bool defaultValue)
804 | {
805 | return Convert.ToBoolean(ReadStringFromProfile(driverProfile, profileName, Convert.ToString(defaultValue)));
806 | }
807 |
808 | internal double ReadDoubleFromProfile(Profile driverProfile, String profileName, double defaultValue)
809 | {
810 | return Convert.ToDouble(ReadStringFromProfile(driverProfile, profileName, Convert.ToString(defaultValue)));
811 | }
812 |
813 | internal String ReadStringFromProfile(Profile driverProfile, String profileName, String defaultValue)
814 | {
815 | return driverProfile.GetValue(driverID, profileName, string.Empty, defaultValue);
816 | }
817 |
818 | ///
819 | /// Write the device configuration to the ASCOM Profile store
820 | ///
821 | internal void WriteProfile()
822 | {
823 | using (Profile driverProfile = new Profile())
824 | {
825 | driverProfile.DeviceType = "Telescope";
826 | driverProfile.WriteValue(driverID, "traceState", traceState.ToString());
827 | driverProfile.WriteValue(driverID, "comPort", comPort.ToString());
828 | driverProfile.WriteValue(driverID, "rightAscensionSideralRatePlus", rightAscensionSideralRatePlus.ToString());
829 | driverProfile.WriteValue(driverID, "rightAscensionSideralRateMinus", rightAscensionSideralRateMinus.ToString());
830 | driverProfile.WriteValue(driverID, "declinationSideralRatePlus", declinationSideralRatePlus.ToString());
831 | driverProfile.WriteValue(driverID, "declinationSideralRateMinus", declinationSideralRateMinus.ToString());
832 | }
833 | }
834 |
835 | internal Boolean Moving
836 | {
837 | get
838 | {
839 | return axisControllers[(int)Axis.RA].Moving || axisControllers[(int)Axis.DEC].Moving;
840 | }
841 | }
842 | #endregion
843 |
844 | #region unimplementable
845 | public ArrayList SupportedActions
846 | {
847 | get
848 | {
849 | traceLogger.LogMessage("SupportedActions Get", "Returning empty arraylist");
850 | return new ArrayList();
851 | }
852 | }
853 |
854 | public string Action(string actionName, string actionParameters)
855 | {
856 | throw new ASCOM.ActionNotImplementedException("Action " + actionName + " is not implemented by this driver");
857 | }
858 |
859 | public double Altitude
860 | {
861 | get
862 | {
863 | traceLogger.LogMessage("Altitude", "Not implemented");
864 | throw new ASCOM.PropertyNotImplementedException("Altitude", false);
865 | }
866 | }
867 |
868 | public double ApertureArea
869 | {
870 | get
871 | {
872 | traceLogger.LogMessage("ApertureArea Get", "Not implemented");
873 | throw new ASCOM.PropertyNotImplementedException("ApertureArea", false);
874 | }
875 | }
876 |
877 | public double ApertureDiameter
878 | {
879 | get
880 | {
881 | traceLogger.LogMessage("ApertureDiameter Get", "Not implemented");
882 | throw new ASCOM.PropertyNotImplementedException("ApertureDiameter", false);
883 | }
884 | }
885 |
886 | public bool AtHome
887 | {
888 | get
889 | {
890 | //No feedback on position=> never at home
891 | traceLogger.LogMessage("AtHome", "Get - " + false.ToString());
892 | return false;
893 | }
894 | }
895 |
896 | public bool AtPark
897 | {
898 | get
899 | {
900 | //No feedback on position=> never parked
901 | traceLogger.LogMessage("AtPark", "Get - " + false.ToString());
902 | return false;
903 | }
904 | }
905 |
906 | public double Azimuth
907 | {
908 | get
909 | {
910 | traceLogger.LogMessage("Azimuth Get", "Not implemented");
911 | throw new ASCOM.PropertyNotImplementedException("Azimuth", false);
912 | }
913 | }
914 |
915 | public double DeclinationRate
916 | {
917 | get
918 | {
919 | double declination = 0.0;
920 | traceLogger.LogMessage("DeclinationRate", "Get - " + declination.ToString());
921 | return declination;
922 | }
923 | set
924 | {
925 | traceLogger.LogMessage("DeclinationRate Set", "Not implemented");
926 | throw new ASCOM.PropertyNotImplementedException("DeclinationRate", true);
927 | }
928 | }
929 |
930 | public PierSide DestinationSideOfPier(double RightAscension, double Declination)
931 | {
932 | traceLogger.LogMessage("DestinationSideOfPier Get", "Not implemented");
933 | throw new ASCOM.PropertyNotImplementedException("DestinationSideOfPier", false);
934 | }
935 |
936 | public bool DoesRefraction
937 | {
938 | get
939 | {
940 | traceLogger.LogMessage("DoesRefraction Get", "Not implemented");
941 | throw new ASCOM.PropertyNotImplementedException("DoesRefraction", false);
942 | }
943 | set
944 | {
945 | traceLogger.LogMessage("DoesRefraction Set", "Not implemented");
946 | throw new ASCOM.PropertyNotImplementedException("DoesRefraction", true);
947 | }
948 | }
949 |
950 | public void FindHome()
951 | {
952 | traceLogger.LogMessage("FindHome", "Not implemented");
953 | throw new ASCOM.MethodNotImplementedException("FindHome");
954 | }
955 |
956 | public double FocalLength
957 | {
958 | get
959 | {
960 | traceLogger.LogMessage("FocalLength Get", "Not implemented");
961 | throw new ASCOM.PropertyNotImplementedException("FocalLength", false);
962 | }
963 | }
964 |
965 |
966 | public void Park()
967 | {
968 | traceLogger.LogMessage("Park", "Not implemented");
969 | throw new ASCOM.MethodNotImplementedException("Park");
970 | }
971 |
972 | public double RightAscensionRate
973 | {
974 | get
975 | {
976 | double rightAscensionRate = 0.0;
977 | traceLogger.LogMessage("RightAscensionRate", "Get - " + rightAscensionRate.ToString());
978 | return rightAscensionRate;
979 | }
980 | set
981 | {
982 | traceLogger.LogMessage("RightAscensionRate Set", "Not implemented");
983 | throw new ASCOM.PropertyNotImplementedException("RightAscensionRate", true);
984 | }
985 | }
986 |
987 | public void SetPark()
988 | {
989 | traceLogger.LogMessage("SetPark", "Not implemented");
990 | throw new ASCOM.MethodNotImplementedException("SetPark");
991 | }
992 |
993 | public PierSide SideOfPier
994 | {
995 | get
996 | {
997 | traceLogger.LogMessage("SideOfPier Get", "Not implemented");
998 | throw new ASCOM.PropertyNotImplementedException("SideOfPier", false);
999 | }
1000 | set
1001 | {
1002 | traceLogger.LogMessage("SideOfPier Set", "Not implemented");
1003 | throw new ASCOM.PropertyNotImplementedException("SideOfPier", true);
1004 | }
1005 | }
1006 |
1007 | public double SiteElevation
1008 | {
1009 | get
1010 | {
1011 | traceLogger.LogMessage("SiteElevation Get", "Not implemented");
1012 | throw new ASCOM.PropertyNotImplementedException("SiteElevation", false);
1013 | }
1014 | set
1015 | {
1016 | traceLogger.LogMessage("SiteElevation Set", "Not implemented");
1017 | throw new ASCOM.PropertyNotImplementedException("SiteElevation", true);
1018 | }
1019 | }
1020 |
1021 | public double SiteLatitude
1022 | {
1023 | get
1024 | {
1025 | traceLogger.LogMessage("SiteLatitude Get", "Not implemented");
1026 | throw new ASCOM.PropertyNotImplementedException("SiteLatitude", false);
1027 | }
1028 | set
1029 | {
1030 | traceLogger.LogMessage("SiteLatitude Set", "Not implemented");
1031 | throw new ASCOM.PropertyNotImplementedException("SiteLatitude", true);
1032 | }
1033 | }
1034 |
1035 | public double SiteLongitude
1036 | {
1037 | get
1038 | {
1039 | traceLogger.LogMessage("SiteLongitude Get", "Not implemented");
1040 | throw new ASCOM.PropertyNotImplementedException("SiteLongitude", false);
1041 | }
1042 | set
1043 | {
1044 | traceLogger.LogMessage("SiteLongitude Set", "Not implemented");
1045 | throw new ASCOM.PropertyNotImplementedException("SiteLongitude", true);
1046 | }
1047 | }
1048 |
1049 | public short SlewSettleTime
1050 | {
1051 | get
1052 | {
1053 | traceLogger.LogMessage("SlewSettleTime Get", "Not implemented");
1054 | throw new ASCOM.PropertyNotImplementedException("SlewSettleTime", false);
1055 | }
1056 | set
1057 | {
1058 | traceLogger.LogMessage("SlewSettleTime Set", "Not implemented");
1059 | throw new ASCOM.PropertyNotImplementedException("SlewSettleTime", true);
1060 | }
1061 | }
1062 |
1063 | public void SlewToAltAz(double Azimuth, double Altitude)
1064 | {
1065 | traceLogger.LogMessage("SlewToAltAz", "Not implemented");
1066 | throw new ASCOM.MethodNotImplementedException("SlewToAltAz");
1067 | }
1068 |
1069 | public void SlewToAltAzAsync(double Azimuth, double Altitude)
1070 | {
1071 | traceLogger.LogMessage("SlewToAltAzAsync", "Not implemented");
1072 | throw new ASCOM.MethodNotImplementedException("SlewToAltAzAsync");
1073 | }
1074 |
1075 | public void SyncToAltAz(double Azimuth, double Altitude)
1076 | {
1077 | traceLogger.LogMessage("SyncToAltAz", "Not implemented");
1078 | throw new ASCOM.MethodNotImplementedException("SyncToAltAz");
1079 | }
1080 |
1081 | public void Unpark()
1082 | {
1083 | traceLogger.LogMessage("Unpark", "Not implemented");
1084 | throw new ASCOM.MethodNotImplementedException("Unpark");
1085 | }
1086 | #endregion
1087 |
1088 | protected virtual void Dispose(bool disposing)
1089 | {
1090 | this.Connected = false;
1091 | foreach (AxisController axisController in this.axisControllers)
1092 | {
1093 | axisController.Dispose();
1094 | }
1095 | this.deviceController.Dispose();
1096 | // Clean up the tracelogger and util objects
1097 | this.traceLogger.Enabled = false;
1098 | this.traceLogger.Dispose();
1099 | this.traceLogger = null;
1100 | this.utilities.Dispose();
1101 | this.utilities = null;
1102 | }
1103 |
1104 | public void Dispose()
1105 | {
1106 | Dispose(true);
1107 | GC.SuppressFinalize(this);
1108 | }
1109 | }
1110 | }
1111 |
--------------------------------------------------------------------------------