├── Code
├── FeedbackControl.m
├── Main.m
├── NextStatey.m
└── TrajectoryGeneratorr.m
├── LICENSE
├── README.md
├── Results
├── best
│ ├── Error Plot.png
│ ├── Output Log.txt
│ ├── ReadME.txt
│ ├── best.csv
│ └── best.mp4
├── ehee.gif
├── eheee.gif
├── newTask
│ ├── Error Plot.png
│ ├── Output log.txt
│ ├── ReadME.txt
│ ├── newTask.csv
│ ├── newTask.gif
│ └── newTask.mp4
└── overshoot
│ ├── Error Plot.png
│ ├── Output Log.txt
│ ├── ReadME.txt
│ ├── overshoot.csv
│ └── overshoot.mp4
└── Yeni Metin Belgesi.txt
/Code/FeedbackControl.m:
--------------------------------------------------------------------------------
1 | function [Vd, V, Je, u_theta_dot, Xerr, Xerr_integral] = FeedbackControl(X, Xd, Xd_next, Kp, Ki, delta_t, thetaList, Xerr_integral)
2 |
3 | %% Arm properties.
4 | Blist = [0 0 1 0 0.033 0; 0 -1 0 -0.5076 0 0; 0 -1 0 -0.3526 0 0; 0 -1 0 -0.2176 0 0; 0 0 1 0 0 0]';
5 | l = 0.47/2;
6 | w = 0.30/2;
7 | r = 0.0475;
8 | F = (r/4) * [-1/(l + w), 1/(l + w), 1/(l + w), -1/(l + w); 1 1 1 1; -1 1 -1 1];
9 | sizee = size(F);
10 | m = sizee(2);
11 | zeross = zeros(1, m);
12 | F6 = [zeross; zeross; F; zeross];
13 |
14 | Tb0 = [1 0 0 0.1662; 0 1 0 0; 0 0 1 0.0026; 0 0 0 1];
15 | M0e = [1 0 0 0.033; 0 1 0 0; 0 0 1 0.6546; 0 0 0 1];
16 | T0e = FKinBody(M0e, Blist, thetaList);
17 | Tbe = Tb0 * T0e;
18 | Teb = TransInv(Tbe);
19 | Jbase = Adjoint(Teb) * F6;
20 | Jarm = JacobianBody(Blist, thetaList);
21 | Je = [Jbase, Jarm];
22 | psInv = pinv(Je, 1e-2);
23 |
24 | Xerr_bracket = MatrixLog6(TransInv(X) * Xd);
25 | Xerr = se3ToVec(Xerr_bracket);
26 | Xerr_integral = Xerr_integral + (delta_t * Xerr);
27 | Vd_bracket = (1/delta_t) * (MatrixLog6(inv(Xd) * Xd_next));
28 | Vd = se3ToVec(Vd_bracket);
29 |
30 | Adj = Adjoint(inv(X) * Xd);
31 | Feedforward = Adj * Vd;
32 | V = Feedforward + (Kp * Xerr) + Ki * Xerr_integral;
33 | %V = round(V, 3);
34 |
35 | u_theta_dot = psInv * V;
36 | %u_theta_dot = round(u_theta_dot, 1);
37 |
38 | %u_theta_dot(1) = temp(5);
39 | %u_theta_dot(2) = temp(6);
40 | %u_theta_dot(3) = temp(7);
41 | %u_theta_dot(4) = temp(8);
42 | %u_theta_dot(5) = temp(9);
43 | %u_theta_dot(6) = temp(1);
44 | %u_theta_dot(7) = temp(2);
45 | %u_theta_dot(8) = temp(3);
46 | %u_theta_dot(9) = temp(4);
47 |
48 | end
--------------------------------------------------------------------------------
/Code/Main.m:
--------------------------------------------------------------------------------
1 | clc
2 | clear
3 |
4 | %% ROBOT PROPERTIES:
5 | tic
6 | Blist = [0 0 1 0 0.033 0; 0 -1 0 -0.5076 0 0; 0 -1 0 -0.3526 0 0; 0 -1 0 -0.2176 0 0; 0 0 1 0 0 0]';
7 | Tb0 = [1, 0, 0, 0.1662; 0, 1, 0, 0; 0, 0, 1, 0.0026; 0, 0, 0, 1];
8 | M0e = [1 0 0 0.033; 0 1 0 0; 0 0 1 0.6546; 0 0 0 1];
9 |
10 | l = 0.47/2;
11 | w = 0.30/2;
12 | r = 0.0475;
13 | z = 0.0963;
14 | F = (r/4) * [-1/(l + w), 1/(l + w), 1/(l + w), -1/(l + w); 1 1 1 1; -1 1 -1 1];
15 |
16 | sizee = size(F);
17 | m = sizee(2);
18 | zeross = zeros(1, m);
19 | F6 = [zeross; zeross; F; zeross];
20 |
21 | %% FEEDFORWARD AND PI CONTROL GAINS:
22 | delta_t = 0.01;
23 |
24 | kp = 20;
25 | ki = 17;
26 | Kp = kp*eye(6);
27 | Ki = ki*eye(6);
28 |
29 | %% TRAJECTORY PLANNING:
30 | Tse_initial = [0.921060994002885 0 0.389418342308651 0.829087881643154; 0 1 0 0; -0.389418342308651 0 0.921060994002885 0.648543375559790; 0 0 0 1];
31 | Tsc_initial = [1 0 0 1; 0 1 0 0; 0 0 1 0.025; 0 0 0 1];
32 | Tsc_final = [0 1 0 0; -1 0 0 -1; 0 0 1 0.025; 0 0 0 1];
33 | Tce_standoff = [1 0 0 0; 0 1 0 0; 0 0 1 0.2; 0 0 0 1] * [cosd(100), 0, sind(100) 0; 0, 1, 0 0; -sind(100), 0, cosd(100), 0; 0 0 0 1];
34 | Tce_grasp = [1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1] * [cosd(100), 0, sind(100) 0; 0, 1, 0 0; -sind(100), 0, cosd(100), 0; 0 0 0 1];
35 |
36 | movement = TrajectoryGeneratorr(Tse_initial, Tsc_initial, Tsc_final, Tce_grasp, Tce_standoff, 1);
37 | positionSize = size(movement);
38 | positionSize = positionSize(1) - 1;
39 |
40 | %% ACTUAL CONFIGURATIONS AND FEEDFORWARD AND PI CONTROL:
41 | % Setting an initial configuration
42 | conf1 = [0.5 0.35 0.6 0 -1.0 0.5 0.1 0 0 0 0 0];
43 | confList(1, :) = conf1(1,:);
44 | error = [];
45 | error2 = [];
46 | errorSize = size(error);
47 | errorSize = errorSize(1);
48 | error2Size = size(error2);
49 | error2Size = error2Size(1);
50 |
51 | Tsb = [cos(conf1(1)), -sin(conf1(1)), 0, conf1(2); sin(conf1(1)), cos(conf1(1)), 0, conf1(3); 0, 0, 1, z; 0, 0, 0, 1 ];
52 | T0e = FKinBody(M0e, Blist, conf1(4:8)');
53 | Tse = Tsb * Tb0 * T0e;
54 | X = Tse;
55 | Tse1 = movement(1, :);
56 | Tse11 = [Tse1(1), Tse1(2), Tse1(3), Tse1(10); Tse1(4), Tse1(5), Tse1(6), Tse1(11); Tse1(7), Tse1(8), Tse1(9), Tse1(12); 0, 0, 0, 1];
57 | Xd1 = Tse11;
58 | Xerr_bracket = MatrixLog6(TransInv(X) * Xd1);
59 | Xerr = se3ToVec(Xerr_bracket);
60 |
61 | Xerr_integral = Xerr;
62 | for i = 1 : positionSize
63 | Tse1 = movement(i, :);
64 | Tse2 = movement(i+1, :);
65 | Tse1 = [Tse1(1), Tse1(2), Tse1(3), Tse1(10); Tse1(4), Tse1(5), Tse1(6), Tse1(11); Tse1(7), Tse1(8), Tse1(9), Tse1(12); 0, 0, 0, 1];
66 | Tse2 = [Tse2(1), Tse2(2), Tse2(3), Tse2(10); Tse2(4), Tse2(5), Tse2(6), Tse2(11); Tse2(7), Tse2(8), Tse2(9), Tse2(12); 0, 0, 0, 1];
67 |
68 | Xd1 = Tse1;
69 | Xd2 = Tse2;
70 |
71 | [Vd, V, Je, controls, Xerr, Xerr_integral] = FeedbackControl(X, Xd1, Xd2, Kp, Ki, delta_t, conf1(i, 4:8), Xerr_integral);
72 | error(errorSize+1, :) = Xerr';
73 | errorSize = size(error);
74 | errorSize = errorSize(1);
75 |
76 | error2(error2Size+1, :) = Xerr_integral';
77 | error2Size = size(error2);
78 | error2Size = error2Size(1);
79 |
80 | conf1(i+1,:) = NextStatey(conf1(i,:), [controls(5:9)', controls(1:4)'], delta_t, 10000);
81 | confList(i+1, :) = conf1(i+1, :);
82 |
83 | phi = conf1(i+1, 1);
84 | x = conf1(i+1, 2);
85 | y = conf1(i+1, 3);
86 | Tsb = [cos(conf1(i+1, 1)), -sin(conf1(i+1, 1)), 0, conf1(i+1, 2); sin(conf1(i+1, 1)), cos(conf1(i+1, 1)), 0, conf1(i+1, 3); 0, 0, 1, z; 0, 0, 0, 1 ];
87 | T0e = FKinBody(M0e, Blist, conf1(i+1, 4:8)');
88 | X = Tsb*Tb0*T0e;
89 | Xd1 = [];
90 | Xd2 = [];
91 | end
92 |
93 | for i = 1 : positionSize + 1
94 | confList(i,13) = movement(i, 13);
95 | end
96 |
97 | disp('Generating the animation file.')
98 | writematrix(confList, 'newTask.csv')
99 | disp('Plotting the Error Graph')
100 | plot(error2)
101 | legend('wbx', 'wby', 'wbz', 'vbx', 'vby', 'vbz')
102 | title('Error Twists (Kp = 20, Ki = 17)')
103 | xlabel('Time (0.01 seconds)')
104 | ylabel('Error')
105 |
106 |
107 | toc
--------------------------------------------------------------------------------
/Code/NextStatey.m:
--------------------------------------------------------------------------------
1 | function newConfiguration = NextStatey(currentConfiguration, controls, delta_t, limit)
2 |
3 | %% Assigning the properties of the robot:
4 | l = 0.47/2;
5 | w = 0.30/2;
6 | r = 0.0475;
7 |
8 | %% Assigning current and new configurations and speeds:
9 | currentJoints = currentConfiguration(4:8)';
10 | currentWheels = currentConfiguration(9:12)';
11 | armJointSpeeds = controls(1:5)';
12 | wheelSpeeds = controls(6:9)';
13 | newJoints = currentJoints + (armJointSpeeds .* delta_t);
14 | newWheels = currentWheels + (wheelSpeeds .* delta_t);
15 | Tsbk = [cos(currentConfiguration(1)), -sin(currentConfiguration(1)), 0, currentConfiguration(2); sin(currentConfiguration(1)), cos(currentConfiguration(1)), 0, currentConfiguration(3); 0, 0, 1, 0.0963; 0, 0, 0, 1];
16 |
17 | %% Calculating deltaTheta to initiate the odometry process:
18 | deltaTheta = newWheels - currentWheels;
19 | thetaDot = deltaTheta/delta_t;
20 |
21 | Vb = (r/4) * [-1 / (l + w), 1 / (l + w), 1 / (l + w), -1 / (l + w); 1, 1, 1, 1; -1, 1, -1, 1] * deltaTheta;
22 | Vb6 = [0; 0; Vb; 0];
23 | newChassisRelative = expm(VecTose3(Vb6));
24 | Tsbk1 = Tsbk * newChassisRelative;
25 |
26 | phi = acos(Tsbk1(1,1));
27 | x = Tsbk1(1, 4);
28 | y = Tsbk1(2, 4);
29 |
30 | chass = [phi x y];
31 |
32 | newConfiguration = [chass'; newJoints; newWheels]';
33 |
34 | end
--------------------------------------------------------------------------------
/Code/TrajectoryGeneratorr.m:
--------------------------------------------------------------------------------
1 | function movement = TrajectoryGeneratorr(Tse_initial, Tsc_initial, Tsc_final, Tce_grasp, Tce_standoff, k)
2 |
3 | Tse_standoff = Tsc_initial * Tce_standoff;
4 | Tse_grasp = Tsc_initial * Tce_grasp;
5 | Tce_standoff_2 = [1 0 0 0; 0 1 0 0; 0 0 1 0.1; 0 0 0 1] * [cosd(100), 0, sind(100) 0; 0, 1, 0 0; -sind(100), 0, cosd(100), 0; 0 0 0 1];
6 | Tse_standoff_2 = Tsc_final * Tce_standoff_2;
7 | Tse_final = Tsc_final * [cosd(100), 0, sind(100) 0; 0, 1, 0 0; -sind(100), 0, cosd(100), 0; 0 0 0 1];
8 |
9 | trajectory1 = ScrewTrajectory(Tse_initial, Tse_standoff, 10, 10/0.01, 3);
10 | trajectory2 = ScrewTrajectory(Tse_standoff, Tse_grasp, 5, 5/0.01, 3);
11 | trajectory3 = ScrewTrajectory(Tse_grasp, Tse_standoff, 5, 5/0.01, 3);
12 | trajectory4 = ScrewTrajectory(Tse_standoff, Tse_standoff_2, 10, 10/0.01, 3);
13 | trajectory5 = ScrewTrajectory(Tse_standoff_2, Tse_final, 5, 5/0.01, 3);
14 | trajectory6 = ScrewTrajectory(Tse_final, Tse_standoff_2, 5, 5/0.01, 3);
15 |
16 | for i = 1 : length(trajectory1)
17 | traj1(i,:) = [trajectory1{i}(1,1) trajectory1{i}(1,2) trajectory1{i}(1,3) trajectory1{i}(2,1) trajectory1{i}(2,2) trajectory1{i}(2,3) trajectory1{i}(3,1) trajectory1{i}(3,2) trajectory1{i}(3,3) trajectory1{i}(1, 4) trajectory1{i}(2, 4) trajectory1{i}(3, 4)];
18 | end
19 |
20 | for i = 1 : length(trajectory2)
21 | traj2(i,:) = [trajectory2{i}(1,1) trajectory2{i}(1,2) trajectory2{i}(1,3) trajectory2{i}(2,1) trajectory2{i}(2,2) trajectory2{i}(2,3) trajectory2{i}(3,1) trajectory2{i}(3,2) trajectory2{i}(3,3) trajectory2{i}(1, 4) trajectory2{i}(2, 4) trajectory2{i}(3, 4)];
22 | end
23 |
24 | for i = 1 : length(trajectory3)
25 | traj3(i,:) = [trajectory3{i}(1,1) trajectory3{i}(1,2) trajectory3{i}(1,3) trajectory3{i}(2,1) trajectory3{i}(2,2) trajectory3{i}(2,3) trajectory3{i}(3,1) trajectory3{i}(3,2) trajectory3{i}(3,3) trajectory3{i}(1, 4) trajectory3{i}(2, 4) trajectory3{i}(3, 4)];
26 | end
27 |
28 | for i = 1 : length(trajectory4)
29 | traj4(i,:) = [trajectory4{i}(1,1) trajectory4{i}(1,2) trajectory4{i}(1,3) trajectory4{i}(2,1) trajectory4{i}(2,2) trajectory4{i}(2,3) trajectory4{i}(3,1) trajectory4{i}(3,2) trajectory4{i}(3,3) trajectory4{i}(1, 4) trajectory4{i}(2, 4) trajectory4{i}(3, 4)];
30 | end
31 |
32 | for i = 1 : length(trajectory5)
33 | traj5(i,:) = [trajectory5{i}(1,1) trajectory5{i}(1,2) trajectory5{i}(1,3) trajectory5{i}(2,1) trajectory5{i}(2,2) trajectory5{i}(2,3) trajectory5{i}(3,1) trajectory5{i}(3,2) trajectory5{i}(3,3) trajectory5{i}(1, 4) trajectory5{i}(2, 4) trajectory5{i}(3, 4)];
34 | end
35 |
36 | for i = 1 : length(trajectory6)
37 | traj6(i,:) = [trajectory6{i}(1,1) trajectory6{i}(1,2) trajectory6{i}(1,3) trajectory6{i}(2,1) trajectory6{i}(2,2) trajectory6{i}(2,3) trajectory6{i}(3,1) trajectory6{i}(3,2) trajectory6{i}(3,3) trajectory6{i}(1, 4) trajectory6{i}(2, 4) trajectory6{i}(3, 4)];
38 | end
39 |
40 | traj1(:, 13) = 0;
41 | traj2(1:200, 13) = 0;
42 | traj2(201:300, 13) = 0;
43 | traj3(:, 13) = 1;
44 | traj4(:, 13) = 1;
45 | traj5(:, 13) = 1;
46 | traj6(1:10, 13) = 1;
47 | traj6(11:300, 13) = 0;
48 |
49 | movement = [traj1; traj2; traj3; traj4; traj5; traj6];
50 |
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | GNU GENERAL PUBLIC LICENSE
2 | Version 3, 29 June 2007
3 |
4 | Copyright (C) 2007 Free Software Foundation, Inc.
5 | Everyone is permitted to copy and distribute verbatim copies
6 | of this license document, but changing it is not allowed.
7 |
8 | Preamble
9 |
10 | The GNU General Public License is a free, copyleft license for
11 | software and other kinds of works.
12 |
13 | The licenses for most software and other practical works are designed
14 | to take away your freedom to share and change the works. By contrast,
15 | the GNU General Public License is intended to guarantee your freedom to
16 | share and change all versions of a program--to make sure it remains free
17 | software for all its users. We, the Free Software Foundation, use the
18 | GNU General Public License for most of our software; it applies also to
19 | any other work released this way by its authors. You can apply it to
20 | your programs, too.
21 |
22 | When we speak of free software, we are referring to freedom, not
23 | price. Our General Public Licenses are designed to make sure that you
24 | have the freedom to distribute copies of free software (and charge for
25 | them if you wish), that you receive source code or can get it if you
26 | want it, that you can change the software or use pieces of it in new
27 | free programs, and that you know you can do these things.
28 |
29 | To protect your rights, we need to prevent others from denying you
30 | these rights or asking you to surrender the rights. Therefore, you have
31 | certain responsibilities if you distribute copies of the software, or if
32 | you modify it: responsibilities to respect the freedom of others.
33 |
34 | For example, if you distribute copies of such a program, whether
35 | gratis or for a fee, you must pass on to the recipients the same
36 | freedoms that you received. You must make sure that they, too, receive
37 | or can get the source code. And you must show them these terms so they
38 | know their rights.
39 |
40 | Developers that use the GNU GPL protect your rights with two steps:
41 | (1) assert copyright on the software, and (2) offer you this License
42 | giving you legal permission to copy, distribute and/or modify it.
43 |
44 | For the developers' and authors' protection, the GPL clearly explains
45 | that there is no warranty for this free software. For both users' and
46 | authors' sake, the GPL requires that modified versions be marked as
47 | changed, so that their problems will not be attributed erroneously to
48 | authors of previous versions.
49 |
50 | Some devices are designed to deny users access to install or run
51 | modified versions of the software inside them, although the manufacturer
52 | can do so. This is fundamentally incompatible with the aim of
53 | protecting users' freedom to change the software. The systematic
54 | pattern of such abuse occurs in the area of products for individuals to
55 | use, which is precisely where it is most unacceptable. Therefore, we
56 | have designed this version of the GPL to prohibit the practice for those
57 | products. If such problems arise substantially in other domains, we
58 | stand ready to extend this provision to those domains in future versions
59 | of the GPL, as needed to protect the freedom of users.
60 |
61 | Finally, every program is threatened constantly by software patents.
62 | States should not allow patents to restrict development and use of
63 | software on general-purpose computers, but in those that do, we wish to
64 | avoid the special danger that patents applied to a free program could
65 | make it effectively proprietary. To prevent this, the GPL assures that
66 | patents cannot be used to render the program non-free.
67 |
68 | The precise terms and conditions for copying, distribution and
69 | modification follow.
70 |
71 | TERMS AND CONDITIONS
72 |
73 | 0. Definitions.
74 |
75 | "This License" refers to version 3 of the GNU General Public License.
76 |
77 | "Copyright" also means copyright-like laws that apply to other kinds of
78 | works, such as semiconductor masks.
79 |
80 | "The Program" refers to any copyrightable work licensed under this
81 | License. Each licensee is addressed as "you". "Licensees" and
82 | "recipients" may be individuals or organizations.
83 |
84 | To "modify" a work means to copy from or adapt all or part of the work
85 | in a fashion requiring copyright permission, other than the making of an
86 | exact copy. The resulting work is called a "modified version" of the
87 | earlier work or a work "based on" the earlier work.
88 |
89 | A "covered work" means either the unmodified Program or a work based
90 | on the Program.
91 |
92 | To "propagate" a work means to do anything with it that, without
93 | permission, would make you directly or secondarily liable for
94 | infringement under applicable copyright law, except executing it on a
95 | computer or modifying a private copy. Propagation includes copying,
96 | distribution (with or without modification), making available to the
97 | public, and in some countries other activities as well.
98 |
99 | To "convey" a work means any kind of propagation that enables other
100 | parties to make or receive copies. Mere interaction with a user through
101 | a computer network, with no transfer of a copy, is not conveying.
102 |
103 | An interactive user interface displays "Appropriate Legal Notices"
104 | to the extent that it includes a convenient and prominently visible
105 | feature that (1) displays an appropriate copyright notice, and (2)
106 | tells the user that there is no warranty for the work (except to the
107 | extent that warranties are provided), that licensees may convey the
108 | work under this License, and how to view a copy of this License. If
109 | the interface presents a list of user commands or options, such as a
110 | menu, a prominent item in the list meets this criterion.
111 |
112 | 1. Source Code.
113 |
114 | The "source code" for a work means the preferred form of the work
115 | for making modifications to it. "Object code" means any non-source
116 | form of a work.
117 |
118 | A "Standard Interface" means an interface that either is an official
119 | standard defined by a recognized standards body, or, in the case of
120 | interfaces specified for a particular programming language, one that
121 | is widely used among developers working in that language.
122 |
123 | The "System Libraries" of an executable work include anything, other
124 | than the work as a whole, that (a) is included in the normal form of
125 | packaging a Major Component, but which is not part of that Major
126 | Component, and (b) serves only to enable use of the work with that
127 | Major Component, or to implement a Standard Interface for which an
128 | implementation is available to the public in source code form. A
129 | "Major Component", in this context, means a major essential component
130 | (kernel, window system, and so on) of the specific operating system
131 | (if any) on which the executable work runs, or a compiler used to
132 | produce the work, or an object code interpreter used to run it.
133 |
134 | The "Corresponding Source" for a work in object code form means all
135 | the source code needed to generate, install, and (for an executable
136 | work) run the object code and to modify the work, including scripts to
137 | control those activities. However, it does not include the work's
138 | System Libraries, or general-purpose tools or generally available free
139 | programs which are used unmodified in performing those activities but
140 | which are not part of the work. For example, Corresponding Source
141 | includes interface definition files associated with source files for
142 | the work, and the source code for shared libraries and dynamically
143 | linked subprograms that the work is specifically designed to require,
144 | such as by intimate data communication or control flow between those
145 | subprograms and other parts of the work.
146 |
147 | The Corresponding Source need not include anything that users
148 | can regenerate automatically from other parts of the Corresponding
149 | Source.
150 |
151 | The Corresponding Source for a work in source code form is that
152 | same work.
153 |
154 | 2. Basic Permissions.
155 |
156 | All rights granted under this License are granted for the term of
157 | copyright on the Program, and are irrevocable provided the stated
158 | conditions are met. This License explicitly affirms your unlimited
159 | permission to run the unmodified Program. The output from running a
160 | covered work is covered by this License only if the output, given its
161 | content, constitutes a covered work. This License acknowledges your
162 | rights of fair use or other equivalent, as provided by copyright law.
163 |
164 | You may make, run and propagate covered works that you do not
165 | convey, without conditions so long as your license otherwise remains
166 | in force. You may convey covered works to others for the sole purpose
167 | of having them make modifications exclusively for you, or provide you
168 | with facilities for running those works, provided that you comply with
169 | the terms of this License in conveying all material for which you do
170 | not control copyright. Those thus making or running the covered works
171 | for you must do so exclusively on your behalf, under your direction
172 | and control, on terms that prohibit them from making any copies of
173 | your copyrighted material outside their relationship with you.
174 |
175 | Conveying under any other circumstances is permitted solely under
176 | the conditions stated below. Sublicensing is not allowed; section 10
177 | makes it unnecessary.
178 |
179 | 3. Protecting Users' Legal Rights From Anti-Circumvention Law.
180 |
181 | No covered work shall be deemed part of an effective technological
182 | measure under any applicable law fulfilling obligations under article
183 | 11 of the WIPO copyright treaty adopted on 20 December 1996, or
184 | similar laws prohibiting or restricting circumvention of such
185 | measures.
186 |
187 | When you convey a covered work, you waive any legal power to forbid
188 | circumvention of technological measures to the extent such circumvention
189 | is effected by exercising rights under this License with respect to
190 | the covered work, and you disclaim any intention to limit operation or
191 | modification of the work as a means of enforcing, against the work's
192 | users, your or third parties' legal rights to forbid circumvention of
193 | technological measures.
194 |
195 | 4. Conveying Verbatim Copies.
196 |
197 | You may convey verbatim copies of the Program's source code as you
198 | receive it, in any medium, provided that you conspicuously and
199 | appropriately publish on each copy an appropriate copyright notice;
200 | keep intact all notices stating that this License and any
201 | non-permissive terms added in accord with section 7 apply to the code;
202 | keep intact all notices of the absence of any warranty; and give all
203 | recipients a copy of this License along with the Program.
204 |
205 | You may charge any price or no price for each copy that you convey,
206 | and you may offer support or warranty protection for a fee.
207 |
208 | 5. Conveying Modified Source Versions.
209 |
210 | You may convey a work based on the Program, or the modifications to
211 | produce it from the Program, in the form of source code under the
212 | terms of section 4, provided that you also meet all of these conditions:
213 |
214 | a) The work must carry prominent notices stating that you modified
215 | it, and giving a relevant date.
216 |
217 | b) The work must carry prominent notices stating that it is
218 | released under this License and any conditions added under section
219 | 7. This requirement modifies the requirement in section 4 to
220 | "keep intact all notices".
221 |
222 | c) You must license the entire work, as a whole, under this
223 | License to anyone who comes into possession of a copy. This
224 | License will therefore apply, along with any applicable section 7
225 | additional terms, to the whole of the work, and all its parts,
226 | regardless of how they are packaged. This License gives no
227 | permission to license the work in any other way, but it does not
228 | invalidate such permission if you have separately received it.
229 |
230 | d) If the work has interactive user interfaces, each must display
231 | Appropriate Legal Notices; however, if the Program has interactive
232 | interfaces that do not display Appropriate Legal Notices, your
233 | work need not make them do so.
234 |
235 | A compilation of a covered work with other separate and independent
236 | works, which are not by their nature extensions of the covered work,
237 | and which are not combined with it such as to form a larger program,
238 | in or on a volume of a storage or distribution medium, is called an
239 | "aggregate" if the compilation and its resulting copyright are not
240 | used to limit the access or legal rights of the compilation's users
241 | beyond what the individual works permit. Inclusion of a covered work
242 | in an aggregate does not cause this License to apply to the other
243 | parts of the aggregate.
244 |
245 | 6. Conveying Non-Source Forms.
246 |
247 | You may convey a covered work in object code form under the terms
248 | of sections 4 and 5, provided that you also convey the
249 | machine-readable Corresponding Source under the terms of this License,
250 | in one of these ways:
251 |
252 | a) Convey the object code in, or embodied in, a physical product
253 | (including a physical distribution medium), accompanied by the
254 | Corresponding Source fixed on a durable physical medium
255 | customarily used for software interchange.
256 |
257 | b) Convey the object code in, or embodied in, a physical product
258 | (including a physical distribution medium), accompanied by a
259 | written offer, valid for at least three years and valid for as
260 | long as you offer spare parts or customer support for that product
261 | model, to give anyone who possesses the object code either (1) a
262 | copy of the Corresponding Source for all the software in the
263 | product that is covered by this License, on a durable physical
264 | medium customarily used for software interchange, for a price no
265 | more than your reasonable cost of physically performing this
266 | conveying of source, or (2) access to copy the
267 | Corresponding Source from a network server at no charge.
268 |
269 | c) Convey individual copies of the object code with a copy of the
270 | written offer to provide the Corresponding Source. This
271 | alternative is allowed only occasionally and noncommercially, and
272 | only if you received the object code with such an offer, in accord
273 | with subsection 6b.
274 |
275 | d) Convey the object code by offering access from a designated
276 | place (gratis or for a charge), and offer equivalent access to the
277 | Corresponding Source in the same way through the same place at no
278 | further charge. You need not require recipients to copy the
279 | Corresponding Source along with the object code. If the place to
280 | copy the object code is a network server, the Corresponding Source
281 | may be on a different server (operated by you or a third party)
282 | that supports equivalent copying facilities, provided you maintain
283 | clear directions next to the object code saying where to find the
284 | Corresponding Source. Regardless of what server hosts the
285 | Corresponding Source, you remain obligated to ensure that it is
286 | available for as long as needed to satisfy these requirements.
287 |
288 | e) Convey the object code using peer-to-peer transmission, provided
289 | you inform other peers where the object code and Corresponding
290 | Source of the work are being offered to the general public at no
291 | charge under subsection 6d.
292 |
293 | A separable portion of the object code, whose source code is excluded
294 | from the Corresponding Source as a System Library, need not be
295 | included in conveying the object code work.
296 |
297 | A "User Product" is either (1) a "consumer product", which means any
298 | tangible personal property which is normally used for personal, family,
299 | or household purposes, or (2) anything designed or sold for incorporation
300 | into a dwelling. In determining whether a product is a consumer product,
301 | doubtful cases shall be resolved in favor of coverage. For a particular
302 | product received by a particular user, "normally used" refers to a
303 | typical or common use of that class of product, regardless of the status
304 | of the particular user or of the way in which the particular user
305 | actually uses, or expects or is expected to use, the product. A product
306 | is a consumer product regardless of whether the product has substantial
307 | commercial, industrial or non-consumer uses, unless such uses represent
308 | the only significant mode of use of the product.
309 |
310 | "Installation Information" for a User Product means any methods,
311 | procedures, authorization keys, or other information required to install
312 | and execute modified versions of a covered work in that User Product from
313 | a modified version of its Corresponding Source. The information must
314 | suffice to ensure that the continued functioning of the modified object
315 | code is in no case prevented or interfered with solely because
316 | modification has been made.
317 |
318 | If you convey an object code work under this section in, or with, or
319 | specifically for use in, a User Product, and the conveying occurs as
320 | part of a transaction in which the right of possession and use of the
321 | User Product is transferred to the recipient in perpetuity or for a
322 | fixed term (regardless of how the transaction is characterized), the
323 | Corresponding Source conveyed under this section must be accompanied
324 | by the Installation Information. But this requirement does not apply
325 | if neither you nor any third party retains the ability to install
326 | modified object code on the User Product (for example, the work has
327 | been installed in ROM).
328 |
329 | The requirement to provide Installation Information does not include a
330 | requirement to continue to provide support service, warranty, or updates
331 | for a work that has been modified or installed by the recipient, or for
332 | the User Product in which it has been modified or installed. Access to a
333 | network may be denied when the modification itself materially and
334 | adversely affects the operation of the network or violates the rules and
335 | protocols for communication across the network.
336 |
337 | Corresponding Source conveyed, and Installation Information provided,
338 | in accord with this section must be in a format that is publicly
339 | documented (and with an implementation available to the public in
340 | source code form), and must require no special password or key for
341 | unpacking, reading or copying.
342 |
343 | 7. Additional Terms.
344 |
345 | "Additional permissions" are terms that supplement the terms of this
346 | License by making exceptions from one or more of its conditions.
347 | Additional permissions that are applicable to the entire Program shall
348 | be treated as though they were included in this License, to the extent
349 | that they are valid under applicable law. If additional permissions
350 | apply only to part of the Program, that part may be used separately
351 | under those permissions, but the entire Program remains governed by
352 | this License without regard to the additional permissions.
353 |
354 | When you convey a copy of a covered work, you may at your option
355 | remove any additional permissions from that copy, or from any part of
356 | it. (Additional permissions may be written to require their own
357 | removal in certain cases when you modify the work.) You may place
358 | additional permissions on material, added by you to a covered work,
359 | for which you have or can give appropriate copyright permission.
360 |
361 | Notwithstanding any other provision of this License, for material you
362 | add to a covered work, you may (if authorized by the copyright holders of
363 | that material) supplement the terms of this License with terms:
364 |
365 | a) Disclaiming warranty or limiting liability differently from the
366 | terms of sections 15 and 16 of this License; or
367 |
368 | b) Requiring preservation of specified reasonable legal notices or
369 | author attributions in that material or in the Appropriate Legal
370 | Notices displayed by works containing it; or
371 |
372 | c) Prohibiting misrepresentation of the origin of that material, or
373 | requiring that modified versions of such material be marked in
374 | reasonable ways as different from the original version; or
375 |
376 | d) Limiting the use for publicity purposes of names of licensors or
377 | authors of the material; or
378 |
379 | e) Declining to grant rights under trademark law for use of some
380 | trade names, trademarks, or service marks; or
381 |
382 | f) Requiring indemnification of licensors and authors of that
383 | material by anyone who conveys the material (or modified versions of
384 | it) with contractual assumptions of liability to the recipient, for
385 | any liability that these contractual assumptions directly impose on
386 | those licensors and authors.
387 |
388 | All other non-permissive additional terms are considered "further
389 | restrictions" within the meaning of section 10. If the Program as you
390 | received it, or any part of it, contains a notice stating that it is
391 | governed by this License along with a term that is a further
392 | restriction, you may remove that term. If a license document contains
393 | a further restriction but permits relicensing or conveying under this
394 | License, you may add to a covered work material governed by the terms
395 | of that license document, provided that the further restriction does
396 | not survive such relicensing or conveying.
397 |
398 | If you add terms to a covered work in accord with this section, you
399 | must place, in the relevant source files, a statement of the
400 | additional terms that apply to those files, or a notice indicating
401 | where to find the applicable terms.
402 |
403 | Additional terms, permissive or non-permissive, may be stated in the
404 | form of a separately written license, or stated as exceptions;
405 | the above requirements apply either way.
406 |
407 | 8. Termination.
408 |
409 | You may not propagate or modify a covered work except as expressly
410 | provided under this License. Any attempt otherwise to propagate or
411 | modify it is void, and will automatically terminate your rights under
412 | this License (including any patent licenses granted under the third
413 | paragraph of section 11).
414 |
415 | However, if you cease all violation of this License, then your
416 | license from a particular copyright holder is reinstated (a)
417 | provisionally, unless and until the copyright holder explicitly and
418 | finally terminates your license, and (b) permanently, if the copyright
419 | holder fails to notify you of the violation by some reasonable means
420 | prior to 60 days after the cessation.
421 |
422 | Moreover, your license from a particular copyright holder is
423 | reinstated permanently if the copyright holder notifies you of the
424 | violation by some reasonable means, this is the first time you have
425 | received notice of violation of this License (for any work) from that
426 | copyright holder, and you cure the violation prior to 30 days after
427 | your receipt of the notice.
428 |
429 | Termination of your rights under this section does not terminate the
430 | licenses of parties who have received copies or rights from you under
431 | this License. If your rights have been terminated and not permanently
432 | reinstated, you do not qualify to receive new licenses for the same
433 | material under section 10.
434 |
435 | 9. Acceptance Not Required for Having Copies.
436 |
437 | You are not required to accept this License in order to receive or
438 | run a copy of the Program. Ancillary propagation of a covered work
439 | occurring solely as a consequence of using peer-to-peer transmission
440 | to receive a copy likewise does not require acceptance. However,
441 | nothing other than this License grants you permission to propagate or
442 | modify any covered work. These actions infringe copyright if you do
443 | not accept this License. Therefore, by modifying or propagating a
444 | covered work, you indicate your acceptance of this License to do so.
445 |
446 | 10. Automatic Licensing of Downstream Recipients.
447 |
448 | Each time you convey a covered work, the recipient automatically
449 | receives a license from the original licensors, to run, modify and
450 | propagate that work, subject to this License. You are not responsible
451 | for enforcing compliance by third parties with this License.
452 |
453 | An "entity transaction" is a transaction transferring control of an
454 | organization, or substantially all assets of one, or subdividing an
455 | organization, or merging organizations. If propagation of a covered
456 | work results from an entity transaction, each party to that
457 | transaction who receives a copy of the work also receives whatever
458 | licenses to the work the party's predecessor in interest had or could
459 | give under the previous paragraph, plus a right to possession of the
460 | Corresponding Source of the work from the predecessor in interest, if
461 | the predecessor has it or can get it with reasonable efforts.
462 |
463 | You may not impose any further restrictions on the exercise of the
464 | rights granted or affirmed under this License. For example, you may
465 | not impose a license fee, royalty, or other charge for exercise of
466 | rights granted under this License, and you may not initiate litigation
467 | (including a cross-claim or counterclaim in a lawsuit) alleging that
468 | any patent claim is infringed by making, using, selling, offering for
469 | sale, or importing the Program or any portion of it.
470 |
471 | 11. Patents.
472 |
473 | A "contributor" is a copyright holder who authorizes use under this
474 | License of the Program or a work on which the Program is based. The
475 | work thus licensed is called the contributor's "contributor version".
476 |
477 | A contributor's "essential patent claims" are all patent claims
478 | owned or controlled by the contributor, whether already acquired or
479 | hereafter acquired, that would be infringed by some manner, permitted
480 | by this License, of making, using, or selling its contributor version,
481 | but do not include claims that would be infringed only as a
482 | consequence of further modification of the contributor version. For
483 | purposes of this definition, "control" includes the right to grant
484 | patent sublicenses in a manner consistent with the requirements of
485 | this License.
486 |
487 | Each contributor grants you a non-exclusive, worldwide, royalty-free
488 | patent license under the contributor's essential patent claims, to
489 | make, use, sell, offer for sale, import and otherwise run, modify and
490 | propagate the contents of its contributor version.
491 |
492 | In the following three paragraphs, a "patent license" is any express
493 | agreement or commitment, however denominated, not to enforce a patent
494 | (such as an express permission to practice a patent or covenant not to
495 | sue for patent infringement). To "grant" such a patent license to a
496 | party means to make such an agreement or commitment not to enforce a
497 | patent against the party.
498 |
499 | If you convey a covered work, knowingly relying on a patent license,
500 | and the Corresponding Source of the work is not available for anyone
501 | to copy, free of charge and under the terms of this License, through a
502 | publicly available network server or other readily accessible means,
503 | then you must either (1) cause the Corresponding Source to be so
504 | available, or (2) arrange to deprive yourself of the benefit of the
505 | patent license for this particular work, or (3) arrange, in a manner
506 | consistent with the requirements of this License, to extend the patent
507 | license to downstream recipients. "Knowingly relying" means you have
508 | actual knowledge that, but for the patent license, your conveying the
509 | covered work in a country, or your recipient's use of the covered work
510 | in a country, would infringe one or more identifiable patents in that
511 | country that you have reason to believe are valid.
512 |
513 | If, pursuant to or in connection with a single transaction or
514 | arrangement, you convey, or propagate by procuring conveyance of, a
515 | covered work, and grant a patent license to some of the parties
516 | receiving the covered work authorizing them to use, propagate, modify
517 | or convey a specific copy of the covered work, then the patent license
518 | you grant is automatically extended to all recipients of the covered
519 | work and works based on it.
520 |
521 | A patent license is "discriminatory" if it does not include within
522 | the scope of its coverage, prohibits the exercise of, or is
523 | conditioned on the non-exercise of one or more of the rights that are
524 | specifically granted under this License. You may not convey a covered
525 | work if you are a party to an arrangement with a third party that is
526 | in the business of distributing software, under which you make payment
527 | to the third party based on the extent of your activity of conveying
528 | the work, and under which the third party grants, to any of the
529 | parties who would receive the covered work from you, a discriminatory
530 | patent license (a) in connection with copies of the covered work
531 | conveyed by you (or copies made from those copies), or (b) primarily
532 | for and in connection with specific products or compilations that
533 | contain the covered work, unless you entered into that arrangement,
534 | or that patent license was granted, prior to 28 March 2007.
535 |
536 | Nothing in this License shall be construed as excluding or limiting
537 | any implied license or other defenses to infringement that may
538 | otherwise be available to you under applicable patent law.
539 |
540 | 12. No Surrender of Others' Freedom.
541 |
542 | If conditions are imposed on you (whether by court order, agreement or
543 | otherwise) that contradict the conditions of this License, they do not
544 | excuse you from the conditions of this License. If you cannot convey a
545 | covered work so as to satisfy simultaneously your obligations under this
546 | License and any other pertinent obligations, then as a consequence you may
547 | not convey it at all. For example, if you agree to terms that obligate you
548 | to collect a royalty for further conveying from those to whom you convey
549 | the Program, the only way you could satisfy both those terms and this
550 | License would be to refrain entirely from conveying the Program.
551 |
552 | 13. Use with the GNU Affero General Public License.
553 |
554 | Notwithstanding any other provision of this License, you have
555 | permission to link or combine any covered work with a work licensed
556 | under version 3 of the GNU Affero General Public License into a single
557 | combined work, and to convey the resulting work. The terms of this
558 | License will continue to apply to the part which is the covered work,
559 | but the special requirements of the GNU Affero General Public License,
560 | section 13, concerning interaction through a network will apply to the
561 | combination as such.
562 |
563 | 14. Revised Versions of this License.
564 |
565 | The Free Software Foundation may publish revised and/or new versions of
566 | the GNU General Public License from time to time. Such new versions will
567 | be similar in spirit to the present version, but may differ in detail to
568 | address new problems or concerns.
569 |
570 | Each version is given a distinguishing version number. If the
571 | Program specifies that a certain numbered version of the GNU General
572 | Public License "or any later version" applies to it, you have the
573 | option of following the terms and conditions either of that numbered
574 | version or of any later version published by the Free Software
575 | Foundation. If the Program does not specify a version number of the
576 | GNU General Public License, you may choose any version ever published
577 | by the Free Software Foundation.
578 |
579 | If the Program specifies that a proxy can decide which future
580 | versions of the GNU General Public License can be used, that proxy's
581 | public statement of acceptance of a version permanently authorizes you
582 | to choose that version for the Program.
583 |
584 | Later license versions may give you additional or different
585 | permissions. However, no additional obligations are imposed on any
586 | author or copyright holder as a result of your choosing to follow a
587 | later version.
588 |
589 | 15. Disclaimer of Warranty.
590 |
591 | THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
592 | APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
593 | HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
594 | OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
595 | THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
596 | PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
597 | IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
598 | ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
599 |
600 | 16. Limitation of Liability.
601 |
602 | IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
603 | WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
604 | THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
605 | GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
606 | USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
607 | DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
608 | PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
609 | EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
610 | SUCH DAMAGES.
611 |
612 | 17. Interpretation of Sections 15 and 16.
613 |
614 | If the disclaimer of warranty and limitation of liability provided
615 | above cannot be given local legal effect according to their terms,
616 | reviewing courts shall apply local law that most closely approximates
617 | an absolute waiver of all civil liability in connection with the
618 | Program, unless a warranty or assumption of liability accompanies a
619 | copy of the Program in return for a fee.
620 |
621 | END OF TERMS AND CONDITIONS
622 |
623 | How to Apply These Terms to Your New Programs
624 |
625 | If you develop a new program, and you want it to be of the greatest
626 | possible use to the public, the best way to achieve this is to make it
627 | free software which everyone can redistribute and change under these terms.
628 |
629 | To do so, attach the following notices to the program. It is safest
630 | to attach them to the start of each source file to most effectively
631 | state the exclusion of warranty; and each file should have at least
632 | the "copyright" line and a pointer to where the full notice is found.
633 |
634 |
635 | Copyright (C)
636 |
637 | This program is free software: you can redistribute it and/or modify
638 | it under the terms of the GNU General Public License as published by
639 | the Free Software Foundation, either version 3 of the License, or
640 | (at your option) any later version.
641 |
642 | This program is distributed in the hope that it will be useful,
643 | but WITHOUT ANY WARRANTY; without even the implied warranty of
644 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
645 | GNU General Public License for more details.
646 |
647 | You should have received a copy of the GNU General Public License
648 | along with this program. If not, see .
649 |
650 | Also add information on how to contact you by electronic and paper mail.
651 |
652 | If the program does terminal interaction, make it output a short
653 | notice like this when it starts in an interactive mode:
654 |
655 | Copyright (C)
656 | This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
657 | This is free software, and you are welcome to redistribute it
658 | under certain conditions; type `show c' for details.
659 |
660 | The hypothetical commands `show w' and `show c' should show the appropriate
661 | parts of the General Public License. Of course, your program's commands
662 | might be different; for a GUI interface, you would use an "about box".
663 |
664 | You should also get your employer (if you work as a programmer) or school,
665 | if any, to sign a "copyright disclaimer" for the program, if necessary.
666 | For more information on this, and how to apply and follow the GNU GPL, see
667 | .
668 |
669 | The GNU General Public License does not permit incorporating your program
670 | into proprietary programs. If your program is a subroutine library, you
671 | may consider it more useful to permit linking proprietary applications with
672 | the library. If this is what you want to do, use the GNU Lesser General
673 | Public License instead of this License. But first, please read
674 | .
675 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # youbot-Pick-and-Place-with-PI-Control
2 | ### Conducted as the Capstone Project of Modern Robotics: Mechanics, Planning, and Control Specialization by Northwestern University, offered on Coursera. (Uses Modern Robotics Library which can be found here, on Github)
3 |
4 | The project aims to make the mobile manipulator youBot pick a cube from an initial configuration and tranport it to a desired location before dropping it off.
5 |
6 | The program uses 3 separate functions to achieve this. TrajectoryGenerator first creates a reference trajectory for the end-effector of the youBot. After an initial configuration
7 | is selected, FeedbackControl function calculates the error between the actual and the reference configuration and finds the control vector to be commanded. Then the NextState
8 | function calculates the new configuration for the robot in order to move the robot towards the objective.
9 |
10 |
11 | 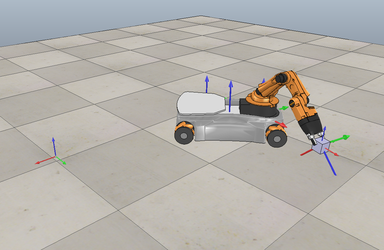
12 |
13 | Controller Information:
14 |
15 | The controller used to move the robot is Feedforward PI Controller. The controller is tested with different Kp and Ki gains to see the error response.
16 |
17 | Feedforward PI with Kp = 100, Ki = 210
18 |
19 | 
20 |
21 | Feedforward PI with Kp = 62, Ki = 19
22 |
23 | 
24 |
25 | With the 100 and 210 being Kp and Ki gains, respectively, an example response to a large initial configuration error looks like this:
26 |
27 | 
28 |
29 | With gains which are not tuned very well, system may behave oscillatory or even unstable. An oscillatory response looks like this:
30 |
31 | 
32 |
33 | An example run of the program looks like this on simulation environment (Coppelia Sim):
34 |
35 | 
36 |
--------------------------------------------------------------------------------
/Results/best/Error Plot.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/best/Error Plot.png
--------------------------------------------------------------------------------
/Results/best/Output Log.txt:
--------------------------------------------------------------------------------
1 | Generating the animation file.
2 | Plotting the Error Graph
3 | Elapsed time is 1.889169 seconds.
--------------------------------------------------------------------------------
/Results/best/ReadME.txt:
--------------------------------------------------------------------------------
1 | Controller Used: Feedforward PID with Kp = 62, Ki = 19.
2 |
3 | Initial Block Configuration (x, y, phi) = (1 m, 0 m, 0 rad)
4 | Final Block Configuration (x, y, phi) = (0 m, -1 m, pi/2 rad)
--------------------------------------------------------------------------------
/Results/best/best.mp4:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/best/best.mp4
--------------------------------------------------------------------------------
/Results/ehee.gif:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/ehee.gif
--------------------------------------------------------------------------------
/Results/eheee.gif:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/eheee.gif
--------------------------------------------------------------------------------
/Results/newTask/Error Plot.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/newTask/Error Plot.png
--------------------------------------------------------------------------------
/Results/newTask/Output log.txt:
--------------------------------------------------------------------------------
1 | Generating the animation file.
2 | Plotting the Error Graph
3 | Elapsed time is 2.707724 seconds.
--------------------------------------------------------------------------------
/Results/newTask/ReadME.txt:
--------------------------------------------------------------------------------
1 | Controller Used: Feedforward PID with Kp = 100, Ki = 210.
2 |
3 | Initial Block Configuration (x, y, phi) = (0 m, -1 m, -pi/2 rad)
4 | Final Block Configuration (x, y, phi) = (1 m, 0 m, 0 rad)
5 |
6 | Exact opposite of the first two simulations.
--------------------------------------------------------------------------------
/Results/newTask/newTask.gif:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/newTask/newTask.gif
--------------------------------------------------------------------------------
/Results/newTask/newTask.mp4:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/newTask/newTask.mp4
--------------------------------------------------------------------------------
/Results/overshoot/Error Plot.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/overshoot/Error Plot.png
--------------------------------------------------------------------------------
/Results/overshoot/Output Log.txt:
--------------------------------------------------------------------------------
1 | Generating the animation file.
2 | Plotting the Error Graph
3 | Elapsed time is 4.011764 seconds.
--------------------------------------------------------------------------------
/Results/overshoot/ReadME.txt:
--------------------------------------------------------------------------------
1 | Controller Used: Feedforward PID with Kp = 20, Ki = 17.
2 |
3 | Initial Block Configuration (x, y, phi) = (1 m, 0 m, 0 rad)
4 | Final Block Configuration (x, y, phi) = (0 m, -1 m, pi/2 rad)
--------------------------------------------------------------------------------
/Results/overshoot/overshoot.mp4:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/kucar17/youbot-Pick-and-Place-with-Feedforward-and-PI-Control/cecf277b69a668e6e4bb582a83e5bb22ea7e59a2/Results/overshoot/overshoot.mp4
--------------------------------------------------------------------------------
/Yeni Metin Belgesi.txt:
--------------------------------------------------------------------------------
1 | Currently working on joint limits to avoid singularities and self collisions. Also trying to find the best gains to make the system perform well with all inputs.
--------------------------------------------------------------------------------