82 | 83 | 84 | ... 85 |86 | |
87 | 88 | 89 | 90 | | 91 |||||||
94 |
|
125 | |||||||
| 128 | | 129 ||||||||
0
509 | 510 | 511 | 512 | `; 513 | */ -------------------------------------------------------------------------------- /README.md: -------------------------------------------------------------------------------- 1 | UPDATE: This code in this article has been archived in the [pre-lvgl branch of pinetime-rust-mynewt](https://github.com/lupyuen/pinetime-rust-mynewt/tree/pre-lvgl). The [pinetime-rust-mynewt firmware](https://github.com/lupyuen/pinetime-rust-mynewt) has been revamped to support [Rust Watch Faces on LVGL](https://lupyuen.github.io/pinetime-rust-mynewt/articles/watchface). [Check out the updates](https://lupyuen.github.io/pinetime-rust-mynewt/articles/watchface) 2 | 3 | # visual-embedded-rust 4 | 5 | - Create and edit Embedded Rust programs visually by dragging and dropping blocks 6 | 7 | - Generates Embedded Rust firmware code for [__PineTime Smart Watch__](https://wiki.pine64.org/index.php/PineTime) hosted on [__Apache Mynewt__](https://mynewt.apache.org/) realtime operating system, with [__druid UI Framework__](https://github.com/lupyuen/druid-embedded) 8 | 9 | - Hardware Required: PineTime Smart Watch and Raspberry Pi (preferably Pi 4 with Raspbian) 10 | 11 |  12 | 13 |  14 | 15 | # Connect PineTime to Raspberry Pi 16 | 17 | 1️⃣ Carefully pry open the PineTime casing. Use tweezers to pivot the shiny battery gently to the side. Be careful not to break the red and black wires that connect the battery to the watch! 18 | 19 | 2️⃣ Just above the battery we see 4 shiny rings. This is the __[Serial Wire Debug](https://en.wikipedia.org/wiki/JTAG#Serial_Wire_Debug) (SWD)__ Port for PineTime. We’ll use this port to flash our firmware to PineTime. The 4 pins (from left to right) are SWDIO (Data I/O), SWDCLK (Clock), 3.3V, GND. 20 | 21 | 🛈 [_What is “flash memory” / “flashing” / “firmware”? Read this_](https://gist.github.com/lupyuen/41fffaddade277d27c48697bca21d837) 22 | 23 |  24 | 25 | In the above photo, the SWD pins from left to right are… 26 | 27 | 1. __SWDIO__ (Yellow) 28 | 29 | 1. __SWDCLK__ (Blue) 30 | 31 | 1. __3.3V__ (Red) 32 | 33 | 1. __GND__ (Black) 34 | 35 | The exposed copper wire at the top centre of the photo is the Bluetooth antenna. Bend it upwards so that it doesn’t come into contact with anything. 36 | 37 |  38 | 39 | 3️⃣ At lower right we see a pad marked 5V. We’ll connect this pad to Raspberry Pi to charge the battery. If charging of the battery is not needed during development, we may leave5V disconnected. 40 | 41 | 4️⃣ Connect the SWD Port and the 5V Pad (optional) to the Raspberry Pi with [__Solid-Core Wire (22 AWG)__](https://www.adafruit.com/product/288) and [__Female-To-Female Jumper Cables__](https://www.adafruit.com/product/1951)… 42 | 43 | | PineTime | Raspberry Pi | Wire Colour | 44 | | :--- | :--- | :--- | 45 | | `SWDIO` | `Header Pin 19 (MOSI)` | Yellow | 46 | | `SWDCLK` | `Header Pin 23 (SCLK)` | Blue | 47 | | `3.3V` | `3.3V` | Red | 48 | | `GND` | `GND` | Black | 49 | | `5V` | `5V` | Green (Optional) | 50 | 51 |  52 | 53 | _Based on https://pinout.xyz/_ 54 | 55 | 5️⃣ We may use Raspberry Pi Zero, 1, 2, 3 or 4. 56 | 57 |  58 | 59 | 6️⃣ The PineTime touchscreen needs to be accessible during development, so I mounted PineTime on a [$2 clear box cover from Daiso](https://www.daisojapan.com/p-30955-clear-box-28-x-47-x-19-x-in-12pks.aspx) with Blu Tack and sticky tape. 60 | 61 |  62 | 63 | # Remove PineTime Flash Protection 64 | 65 | PineTime is shipped with preloaded demo firmware. We need to erase the demo firmware and unprotect PineTime’s flash memory so that we may flash our own firmware. 66 | 67 | 🛈 [_What is “flash protection”? Read this_](https://gist.github.com/lupyuen/3ee440542853e1e637582c4efa1b240a) 68 | 69 | 1️⃣ Power on the Raspberry Pi. Open a command prompt and enter the following… 70 | 71 | ```bash 72 | sudo raspi-config 73 | ``` 74 | 75 | Select `Interfacing Options → SPI → Yes` 76 | 77 | Select `Finish` 78 | 79 | At the command prompt, enter the following… 80 | 81 | ```bash 82 | # Remove folders ~/pinetime-rust-mynewt and ~/openocd-spi (if they exist) 83 | rm -rf ~/pinetime-rust-mynewt 84 | rm -rf ~/openocd-spi 85 | 86 | # Download and extract "pinetime-rust-mynewt" folder containing our prebuilt firmware, source files and flashing scripts 87 | sudo apt install -y wget p7zip-full 88 | cd ~ 89 | wget https://github.com/lupyuen/pinetime-rust-mynewt/releases/download/v3.0.3/pinetime-rust-mynewt.7z 90 | 7z x pinetime-rust-mynewt.7z 91 | rm pinetime-rust-mynewt.7z 92 | 93 | # Install build tools for PineTime: VSCode, Rust, gcc, gdb, openocd-spi, newt 94 | cd ~/pinetime-rust-mynewt 95 | scripts/install-pi.sh 96 | 97 | # Latest nightly-2020-04-20 fails with asm error, so we use nightly-2020-02-16 98 | source $HOME/.cargo/env 99 | rustup default nightly-2020-02-16 100 | rustup update 101 | rustup target add thumbv7em-none-eabihf 102 | ``` 103 | 104 | 2️⃣ At the `Welcome to Rust!` prompt, press Enter to select the default option: 105 | 106 | `1) Proceed with installation (default)` 107 | 108 | If you see this error… 109 | 110 | ``` 111 | Cloning into 'openocd-spi/jimtcl'... 112 | fatal: unable to access 'http://repo.or.cz/r/jimtcl.git/': Recv failure: Connection reset by peer 113 | fatal: clone of 'http://repo.or.cz/r/jimtcl.git' into submodule path '/private/tmp/aa/openocd-spi/jimtcl' failed 114 | ``` 115 | 116 | It means that the sub-repository for one of the dependencies jimtcl is temporarily down. You may download the pre-built `openocd-spi` binaries [from this link](https://github.com/lupyuen/pinetime-rust-mynewt/releases/download/openocd-spi2/openocd-spi.7z). Then copy the executable openocd-spi/src/openocd to pinetime-rust-mynewt/openocd/bin/openocd 117 | 118 | 3️⃣ When the installation has completed, enter the following at the command prompt… 119 | 120 | ```bash 121 | # Remove flash protection from PineTime and erase demo firmware 122 | cd ~/pinetime-rust-mynewt 123 | scripts/nrf52-pi/flash-unprotect.sh 124 | ``` 125 | 126 | 4️⃣ We should see `Shut Down And Power Off Your Raspberry Pi`… 127 | 128 | 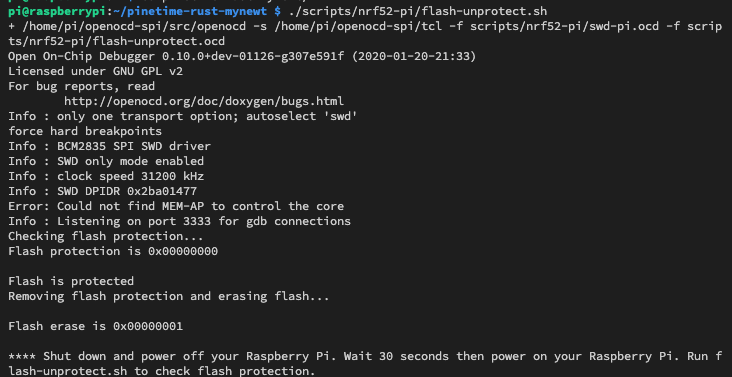 129 | 130 | If we see `Clock Speed` and nothing else after that… 131 | 132 | ``` 133 | Info : BCM2835 SPI SWD driver 134 | Info : SWD only mode enabled 135 | Info : clock speed 31200 kHz 136 | Info : SWD DPIDR 0x2ba01477 137 | ``` 138 | 139 | Then the connection to the SWD Port is probably loose, please check the pins. 140 | 141 | If we don't see this `DPIDR` number, or if we see a different `DPIDR` number... 142 | 143 | ``` 144 | SWD DPIDR 0x2ba01477 145 | ``` 146 | 147 | Then the connection to the SWD Port is most likely loose, please check the pins. 148 | 149 | Also enter `sudo raspi-config` and confirm that the SPI port has been enabled. 150 | 151 | If we see this instead… 152 | 153 | ``` 154 | openocd/bin/openocd: cannot execute binary file: Exec format error 155 | ``` 156 | 157 | Then `install-pi.sh` probably didn’t run correctly. To fix this, copy the `openocd` executable like this… 158 | 159 | ```bash 160 | cp $HOME/openocd-spi/src/openocd $HOME/pinetime-rust-mynewt/openocd/bin/openocd 161 | ``` 162 | 163 | 5️⃣ Shut down and power off your Raspberry Pi. Wait 30 seconds for the red and green LEDs on your Pi to turn off. Power on your Pi. Enter the same commands at a command prompt… 164 | 165 | ```bash 166 | # Remove flash protection from PineTime and erase demo firmware 167 | cd ~/pinetime-rust-mynewt 168 | scripts/nrf52-pi/flash-unprotect.sh 169 | ``` 170 | 171 | 6️⃣ We should see `Flash Is Already Unprotected`… 172 | 173 | PineTime’s demo firmware has been erased and the flash protection has been removed. 174 | 175 | 🛈 [_What is OpenOCD? Why Raspberry Pi and not ROCK64 or Nvidia Jetson Nano? Read this_](https://gist.github.com/lupyuen/18e66c3e81e11050a10d1192c5b84bb0) 176 | 177 | # Edit The Visual Rust Application 178 | 179 | We shall be using VSCode with the Visual Embedded Rust Extension to edit our Visual Rust application graphically. 180 | 181 | 🛈 [_What is VSCode? Is it related to Visual Studio? How is Microsoft involved? Read this_](https://gist.github.com/lupyuen/08e383845d68d3337747e8eb59d0f624) 182 | 183 | 1️⃣ Launch VSCode by clicking the Raspberry Pi Menu (top left corner) → Programming → Code OSS Headmelted 184 | 185 | In VSCode, click `File → Open Folder` 186 | 187 | Under `Home`, select the folder `pinetime-rust-mynewt` and click OK 188 | 189 | When prompted to open the workspace, click Open Workspace 190 | 191 | When prompted to install Extension Recommendations, click `Install All` 192 | 193 | Ignore the message `Unable To Watch For File Changes`. Close the message when it appears. 194 | 195 | 2️⃣ Install the `Visual Embedded Rust` Extension... 196 | 197 | Click `View → Extensions` 198 | 199 | Search for `Visual Embedded Rust` 200 | 201 | Install the extension 202 | 203 | 3️⃣ Enable the Visual Rust application... 204 | 205 | Browse to `rust/app/Cargo.toml` 206 | 207 | Modify the file such that `visual_app` is uncommented and the other options are commented out... 208 | 209 | ```yaml 210 | default = [ # Select the conditional compiled features 211 | # "display_app", # Disable graphics display app 212 | # "ui_app", # Disable druid UI app 213 | "visual_app", # Enable Visual Rust app 214 | # "use_float", # Disable floating-point for GPS geolocation 215 | ] 216 | ``` 217 | 218 | 4️⃣ Edit the Visual Rust application... 219 | 220 | Browse to [`rust/app/src/visual.rs`](https://github.com/lupyuen/pinetime-rust-mynewt/blob/master/rust/app/src/visual.rs) 221 | 222 | Click `Visual Editor` at top right 223 | 224 |  225 | 226 | Use the Visual Editor to edit the Visual Rust application 227 | 228 |  229 | 230 | 5️⃣ After editing, save the [`visual.rs`](https://github.com/lupyuen/pinetime-rust-mynewt/blob/master/rust/app/src/visual.rs) source file to save the visual program. Don't edit the Rust source file manually, always use the Visual Editor. 231 | 232 | [_Rust Source Code generated from Visual Rust application_](https://github.com/lupyuen/pinetime-rust-mynewt/blob/master/rust/app/src/visual.rs) 233 | 234 | The Visual Rust application shows a button that increments a counter... 235 | 236 |  237 | 238 | Let's look at the blocks in the Visual Rust application... 239 | 240 | # On Start 241 | 242 |  243 | 244 | Upon starting the Watch App, we initialise the `count` variable to 0. 245 | 246 | This block generates the following Rust code... 247 | 248 | ```rust 249 | /// Application State 250 | #[infer_type] // Infer the missing types 251 | #[derive(Clone, Data, Default)] 252 | struct State { 253 | count: _, 254 | } 255 | 256 | /// Will be run upon startup to launch the app 257 | #[infer_type] // Infer the missing types 258 | pub fn on_start() -> MynewtResult<()> { 259 | console::print("on_start\n"); 260 | // Build a new window 261 | let main_window = WindowDesc::new(ui_builder); 262 | // Create application state 263 | let mut state = State::default(); 264 | state.count = 0; 265 | 266 | // Launch the window with the application state 267 | AppLauncher::with_window(main_window) 268 | .use_simple_logger() 269 | .launch(state) 270 | .expect("launch failed"); 271 | // Return success to `main()` function 272 | Ok(()) 273 | } 274 | ``` 275 | 276 | # Create App 277 | 278 |  279 | 280 | We create a Watch App with two Widgets... 281 | 282 | 1. A Label named `my_label` surrounded by padding of 5 pixels 283 | 284 | 1. A Button named `my_button` with the title `Press Me`, surrounded by padding of 5 pixels 285 | 286 | This block generates the following Rust code... 287 | 288 | ```rust 289 | /// Build the UI for the window 290 | #[infer_type] // Infer the missing types 291 | fn ui_builder() -> impl Widget520 | https://visualstudio.microsoft.com/downloads/#build-tools-for-visual-studio-2019 521 | 522 | 1. Click the `Individual Components` tab 523 | 524 | Select the following components:
525 | `Windows 10 SDK (10.0.18362.0)`
526 | `C++ CMake Tools for Windows`
527 | (This should be automatically selected) `MSVC v142 — VS 2019 C++ x64/x86 Build Tools` 528 | 529 |  530 | 531 | 1. Install rustup according to the instructions here:
532 | https://rustup.rs 533 | 534 | Click the link provided to download `rustup‑init.exe`
535 | Launch the downloaded file `rustup‑init.exe`
536 | 537 | If you see the message `Windows Defender SmartScreen prevented an unrecognised app from starting`…
538 | Click `More Info`
539 | Click `Run Anyway`
540 | 541 | At the `Welcome to Rust!` prompt, press Enter to select the default option:
542 | `1) Proceed with installation (default)` 543 | 544 | 1. Open the Windows Command Prompt. Enter into the command prompt: 545 | 546 | ``` 547 | rustup default nightly 548 | rustup update 549 | rustup target add thumbv7m-none-eabi 550 | rustc -V 551 | ``` 552 | 553 | The reported version of rustc should be 1.38.0 or later:
554 | `rustc 1.38.0-nightly (435236b88 2019–08–01)` 555 | 556 | 1. Download the `stm32bluepill-mynewt-sensor.7z` file attached below…
557 | https://github.com/lupyuen/stm32bluepill-mynewt-sensor/releases/tag/v7.0.3 558 | 559 | Expand the `.7z` file with 7zip…
560 | https://www.7-zip.org/download.html 561 | 562 | 1. Install Arm Cross-Compiler and Linker for Windows from Arm Developer Website…
563 | https://developer.arm.com/-/media/Files/downloads/gnu-rm/8-2019q3/RC1.1/gcc-arm-none-eabi-8-2019-q3-update-win32-sha1.exe?revision=fcadabed-d946-49dc-8f78-0732d2f43773?product=GNU%20Arm%20Embedded%20Toolchain,32-bit,,Windows,8-2019-q3-update 564 | 565 | Select this option at the last install step:
566 | `Add path to environment variable` 567 | 568 | 1. Download the ST-Link USB driver from ST-Link Driver Website (email registration required)…
569 | https://www.st.com/en/development-tools/stsw-link009.html 570 | 571 | Click `Get Software`
572 | Unzip the downloaded file. Double-click the driver installer:
573 | `dpinst_amd64.exe` 574 | 575 | 1. Launch Visual Studio Code
576 | Install the extension “Cortex-Debug”…
577 | https://marketplace.visualstudio.com/items?itemName=marus25.cortex-debug 578 | 579 | 1. Click `File → Open Folder` 580 | 581 | Select the downloaded folder `stm32bluepill-mynewt-sensor` 582 | 583 | When prompted to open the workspace, click `Open Workspace` 584 | 585 |  586 | 587 | 1. Copy your Visual Program source file to `stm32bluepill-mynewt-sensor/rust/app/src/lib.rs`. Overwrite the existing file. 588 | 589 |  590 | 591 | 1. Delete the files `app_network.rs` and `app_sensor.rs` in that folder 592 | 593 | 1. If you have a Quectel NB-IoT module…
594 | 595 | Open the following file and configure the program settings:
596 | `targets/bluepill_my_sensor/syscfg.yml`
597 | Change the NB-IoT band setting `NBIOT_BAND`. Check with your NB-IoT operator for the band to use. 598 | 599 | 1. Click `Terminal → Run Task → [1] Build bluepill_boot` 600 | 601 | This builds the bootloader, which starts the Apache Mynewt operating system upon startup. If it shows errors, [compare with this build log](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/build-bootloader.log). 602 | 603 | 1. Click `Terminal → Run Task → [2] Build bluepill_my_sensor` 604 | 605 | This builds the firmware containing our Rust program. [Compare with this build log](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/build-application.log). 606 | 607 | When our Rust program has been successfully compiled as Blue Pill ROM firmware, we should see this… 608 | 609 |  610 | 611 | 1. Click `Terminal → Run Task → [3] Image bluepill_my_sensor` 612 | 613 | This creates the Blue Pill flash image from the firmware. [Compare with this image log](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/image.log) 614 | 615 | If any source files or configuration files are changed, rebuild the application by clicking
616 | `Terminal → Run Task → [2] Build bluepill_my_sensor` 617 | 618 | ## OBSOLETE: Connect The Hardware 619 | 620 | | | | 621 | |:- |:- | 622 | | 
_From top to bottom: STM32 Blue Pill, ST-Link V2, Quectel BC95-G breakout board with antenna, NB-IoT SIM_ | We’ll need the following hardware…
[1] __STM32 Blue Pill:__ Under $2, search [AliExpress](https://www.aliexpress.com/wholesale?catId=0&initiative_id=SB_20180924131057&SearchText=stm32f103c8t6+development+board&switch_new_app=y) for `stm32f103c8t6 development board`
[2] __ST-Link V2 USB Adapter:__ Under $2, search [AliExpress](https://www.aliexpress.com/wholesale?catId=0&initiative_id=SB_20180924134644&SearchText=st-link+v2&switch_new_app=y) for `st-link v2`
__Optional:__ To transmit data to the NB-IoT network, we’ll also need…
[3] __Quectel BC95-G Global NB-IoT Module__ ([breakout board with antenna](https://www.aliexpress.com/wholesale?catId=0&initiative_id=SB_20190725022150&SearchText=bc95-g+nb101&switch_new_app=y))
I ordered mine [from Taobao](https://item.taobao.com/item.htm?id=577310122904). [The manual in Chinese is here](http://rs.iotxx.com/uploads/doc/%E8%B0%B7%E9%9B%A8NB10x%E4%BD%BF%E7%94%A8%E8%AF%B4%E6%98%8E%E4%B9%A6-V1.3.pdf).
BC95-G works in all NB-IoT frequency bands worldwide. If you’re buying a different NB-IoT module, check that it supports your local NB-IoT Frequency Band. (For example: In Singapore I’m using NB-IoT Frequency Band 8 with StarHub)
[4] __NB-IoT SIM__ from your local NB-IoT network operator
Many thanks to [StarHub](https://www.starhub.com/) for sponsoring the NB-IoT SIM that I used for this tutorial! 623 | | 624 | 625 |  626 | 627 | Connect Blue Pill to Quectel BC95-G and ST-Link as follows… 628 | 629 | | Blue Pill | Quectel BC95-G | ST-Link V2 | Wire Colour | 630 | | :--- | :--- | :--- | :--- | 631 | | `PA2 (UART2 TX2)` | `RXD (Pin 4)` | | Green | 632 | | `PA3 (UART2 RX2)` | `TXD (Pin 3)` | | Blue | 633 | | `GND` | `GND (Pin 1)` | | Black | 634 | | | `VCC (Pin 2)` | `5.0V (Pin 10)` | Yellow | 635 | | `3V3` | | `3.3V (Pin 8)` | Red | 636 | | `DIO` | | `SWDIO (Pin 4)` | Orange | 637 | | `DCLK` | | `SWDCLK (Pin 2)` | Brown | 638 | | `GND` | | `GND (Pin 6)` | Black | 639 | 640 | Both yellow jumpers on Blue Pill should be set to the 0 position, as shown in the above photo. 641 | 642 | | | | 643 | | :- | :- | 644 | | 
_SIM partially exposed to show the unusual orientation_ | Note that we are powering the Quectel module with __5V from ST-Link instead of 3.3V from Blue Pill__. That’s because the module requires more power than Blue Pill can provide. (How did I find out? Because the module kept restarting when I powered it from Blue Pill.)
__Check the documentation for your Quectel breakout board to confirm that it supports 5V__. ([Mine does](http://rs.iotxx.com/uploads/doc/%E8%B0%B7%E9%9B%A8NB10x%E4%BD%BF%E7%94%A8%E8%AF%B4%E6%98%8E%E4%B9%A6-V1.3.pdf))
__Insert the NB-IoT SIM__ according to the orientation shown in the photo. (Yes the SIM notch faces outward, not inward).
_Remember: Always connect the antenna before powering up the NB-IoT module!_
__If you’re using Windows:__ Make sure that the ST-Link Driver has been installed before connecting ST-Link to your computer 645 | | 646 | 647 | ## OBSOLETE: Flash The Firmware To Blue Pill 648 | 649 |  650 | 651 | 1. Check that the Blue Pill is connected to ST-Link…
652 | And that the ST-Link is connected to your computer’s USB port.
653 | Now let’s head back to Visual Studio Code… 654 | 655 | 1. Click `Terminal → Run Task → [4] Load bluepill_boot` 656 | 657 | This flashes the bootloader to Blue Pill, to start the Apache Mynewt operating system upon startup. If it shows errors, [compare with this flash log](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/load-bootloader.log). 658 | 659 | 1. Click `Terminal → Run Task → [5] Load bluepill_my_sensor` 660 | 661 | This flashes the firmware (containing our Visual Program) to Blue Pill. If it shows errors, [compare with this flash log](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/load-application.log). 662 | 663 | ## OBSOLETE: Run The Program 664 | 665 | 1. Click `Debug → Start Debugging` 666 | 667 | 1. Click `View → Output` 668 | 669 | Select `Adapter Output` to see the Blue Pill log 670 | 671 |  672 | 673 | 1. The debugger pauses at the line with `LoopCopyDataInit` 674 | 675 | Click `Continue` or press `F5` 676 | 677 |  678 | 679 | 1. The debugger pauses next at the `main()` function. 680 | 681 | Click `Continue` or press `F5` 682 | 683 |  684 | 685 | Our Blue Pill should now poll its internal temperature sensor every 10 seconds. It should also transmit the temperature data to the CoAP server hosted at thethings.io. 686 | 687 | [The Blue Pill log should look like this](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/visual.log). The log is explained below in the _"Quectel NB-IoT AT Commands"_ section. 688 | 689 | [微博视频](https://weibo.com/7285313566/I2MZOeP0F) 690 | 691 | [YouTube Video](https://youtu.be/PL4Yj3IS5ck) 692 | 693 | Upon clicking the URL `https://blue-pill-geolocate.appspot.com/?device=5cfca8c…` that’s shown in the Blue Pill log, we’ll see a web page that displays the temperature received by the server at thethings.io. 694 | 695 | The server has converted the raw temperature into degrees Celsius. We convert the temperature at the server to conserve RAM and ROM on Blue Pill. 696 | 697 | 
698 | _Display of sensor data received from our Blue Pill_ 699 | 700 | ## OBSOLETE: Function 1: On Start 701 | 702 |  703 | 704 | `On Start` marks the start of the program. Here we define some constants — values used by the program that won’t change as the program runs… 705 | 706 | 1. `SENSOR_DEVICE` is the name of the sensor that the program will poll (check periodically). We’ll be polling Blue Pill’s Internal Temperature Sensor, which is named `temp_stm32_0` 707 | 708 | 1. `SENSOR_POLL_TIME` is the time interval (in milliseconds) for polling the sensor. We’ll set this to 10 seconds (or 10,000 milliseconds) 709 | 710 | 1. `TEMP_SENSOR_KEY` is the name of the sensor data field that our program will send to the server. We’ll call it `t` to tell the server we’re sending a temperature value. 711 | 712 | 1. `TEMP_SENSOR_TYPE` is the type of sensor data that our program will send: Raw ambient temperature in whole numbers (integers from 0 to 4095), hence `SENSOR_TYPE_AMBIENT_TEMPERATURE_RAW` 713 | 714 | Why do we send the temperature in raw form instead of the usual decimal (floating-point) form like 28.9 degrees Celsius? That’s because Blue Pill has very limited RAM and ROM. Sending the raw temperature without conversion will save us from reserving RAM and ROM that would be needed for the floating-point conversion. We’ll let the server convert instead. 715 | 716 | By Rust convention, constants are named in uppercase. Hence we name the constants as `SENSOR_DEVICE` instead of sensor_device 717 | 718 |  719 | 720 | Next we call the function `start_sensor_listener` to begin polling the temperature sensor every 10 seconds. More about this in the next section. 721 | 722 |  723 | 724 | Finally we call `start_server_transport`, which is a system function defined in the `sensor_network` library. This function starts a background task to establish a connection to the NB-IoT network. For this tutorial, we’ll be transmitting sensor data over the NB-IoT network, which is available worldwide. 725 | 726 | It may take a few seconds to complete, but the function executes in the background so it won’t hold up other tasks, like polling the temperature sensor. 727 | 728 | Take note of the Rust convention… `sensor_network::start_server_transport` refers to the function `start_server_transport` that’s found inside the Rust Library `sensor_network`. Rust Libraries are also known as “Crates”. 729 | 730 | How was the `On Start` function created? 731 | By dragging and dropping the blocks from the Blocks Bar at the left of the Visual Program. 732 | That’s how we create a Visual Program… By arranging the blocks to compose a program! 733 | 734 | [微博视频](https://weibo.com/7285313566/I2MOamxS9) 735 | 736 | [YouTube Video](https://youtu.be/Qw1N-01PAy8) 737 | 738 |  739 | 740 | ## OBSOLETE: Function 2: Start Sensor Listener 741 | 742 |  743 | 744 | `To start_sensor_listener With ...` is the way that we define functions in the Visual Program. Here we define `start_sensor_listener` as a function that accepts 4 parameters (or inputs), whose values we have seen from the previous section… 745 | 746 | 1. `sensor_name`: Name of the sensor to be polled. Set to `SENSOR_DEVICE` (i.e. `temp_stm32_0`) 747 | 748 | 1. `sensor_key`: Name of the sensor data field to be sent to the server. Set to `TEMP_SENSOR_KEY` (i.e. `t`) 749 | 750 | 1. `sensor_type`: Type of sensor data that will be sent to the server. Set to `SENSOR_TYPE_AMBIENT_TEMPERATURE_RAW` 751 | 752 | 1. `poll_time`: Time interval (in milliseconds) for polling the sensor. Set to `SENSOR_POLL_TIME` (i.e. 10,000 milliseconds or 10 seconds) 753 | 754 |  755 | 756 | Next we call the system function `set_poll_rate_ms`, defined in the `sensor` library. The `sensor` library comes from the Apache Mynewt operating system, which manages all sensors on Blue Pill. 757 | 758 | By calling the function `set_poll_rate_ms` with `sensor_name` set to `temp_stm32_0` and `poll_time` set to `10000` (milliseconds), we are asking the system to poll the temperature sensor every 10 seconds. And the system will happily fetch the temperature value on our behalf every 10 seconds. 759 | 760 | What shall we do with the temperature value? We’ll define a Listener Function to transmit the data. But first… 761 | 762 |  763 | 764 | We call function `mgr_find_next_bydevname` (also from the `sensor` library) to fetch the sensor driver from the system and store it in the variable `sensor_driver`. By passing the `sensor_name` as `temp_stm32_0`, the function returns the driver responsible for managing the temperature sensor. The driver will be used for setting the Listener Function in a while. 765 | 766 |  767 | 768 | Before that, we check the sensor driver was actually found. If we had misspelt the name of the sensor, the sensor driver would not be found and it would be set to `null`, a special Rust value that means “nothing”. Hence we check to ensure that `sensor_driver` is not `null`. 769 | 770 |  771 | 772 | We create a sensor listener (stored as `listener`) by calling the system function `new_sensor_listener`, passing in the `sensor_key` (set to `t`) and the `sensor_type` (raw ambient temperature). func is the name of the Listener Function that will be called after reading the sensor data: `handle_sensor_data`. Which we’ll cover in the next section. 773 | 774 |  775 | 776 | To register the Listener Function in the system, we call the system function `register_listener`, passing in the `sensor_driver` and the sensor listener that we have just created. 777 | 778 | After that, the operating system will automatically read the temperature sensor every 10 seconds and call our function `handle_sensor_data` with the temperature value. 779 | 780 | [微博视频](https://weibo.com/7285313566/I2MWZ1CnK) 781 | 782 | [YouTube Video](https://youtu.be/ytGa-7q6sqY) 783 | 784 | ## OBSOLETE: Function 3: Handle Sensor Data 785 | 786 |  787 | 788 | How shall we handle the temperature data that has been read? `handle_sensor_data` passes the sensor data to another function `send_sensor_data` that transmits the sensor data to the server. More about `send_sensor_data` in a while. 789 | 790 | The function `handle_sensor_data` doesn’t seem to do much… why did we design the program this way? It’s meant for future expansion — when we need more complicated logic for handling sensor data, we’ll put the logic into `handle_sensor_data` 791 | 792 | `handle_sensor_data` could be extended to handle multiple sensors, aggregating the sensor data before transmitting. Or it could check for certain conditions and decide whether it should transmit the data. This program structure gives us the most room to expand for the future. 793 | 794 | ## OBSOLETE: Function 4: Send Sensor Data 795 | 796 |  797 | 798 | The final function in our program, `send_sensor_data`, is called by `handle_sensor_data` to transmit sensor data. The parameter `sensor_data` contains the field name `t` and the sensor value, like `1715`. Remember that this is a raw temperature value. The server will convert the raw value to degrees Celsius later. 799 | 800 |  801 | 802 | We call `get_device_id` from the `sensor_network` library to fetch the Device ID from the system. This is a long string of random letters and digits like `a8b2c7d8e9b2...` Each time we restart Blue Pill we’ll get a different Device ID. We’ll use this Device ID later to identify our Blue Pill uniquely and check whether the server has received the temperature sensor data from our Blue Pill. 803 | 804 |  805 | 806 | Next we call `init_server_post` (also from `sensor_network` library) to prepare a sensor data message that will be sent to the server. Because Blue Pill has limited RAM, this function will ensure that only one task is allowed to compose messages at any time. The other tasks will have to wait for their turn. 807 | 808 |  809 | 810 | `init_server_post` returns a true/false result (known as a boolean) that indicates whether the NB-IoT network connection has been established. This stored in the variable `network_ready`. 811 | 812 | Only when `network_ready` is true, which means that the device has connected to the NB-IoT network, then we proceed to compose a CoAP Message. 813 | 814 |  815 | 816 | What’s a CoAP Message? It’s a standard format for transmitting sensor data over NB-IoT. Here we are transmitting two data values in the CoAP Message... 817 | 818 | 1. `device_id`: The randomly-generated Device ID that uniquely identifies our Blue Pill. This field shall be transmitted with the field name device 819 | 820 | 1. `sensor_data`: Contains the field name `t` and the sensor value, like `1715` 821 | 822 |  823 | 824 | The CoAP Message is transmitted only when function `do_server_post` is called. Again this transmission takes place in a background task, so it won’t hold up our program from polling the sensor. 825 | 826 | Notice that `_payload` is named differently… it begins with an underscore `_`. By Rust convention, variables that are set but not read should be named with an underscore `_` as the first character. Because the Rust Compiler will warn us about unused variables. 827 | 828 | This effectively tells the Rust Compiler: _“Yes I’m setting the variable `_payload` and I’m not using the value… Please don’t warn me that I may have misspelt the name `_payload`"_ 829 | 830 |  831 | 832 | At the end of the function, we display a URL in the Blue Pill log that contains the Device ID. The URL looks like this: https://blue-pill-geolocate.appspot.com/?device=5cfca8c… 833 | We’ll click this URL to verify that the server has received our sensor data. 834 | 835 | ## OBSOLETE: Rust Source Files 836 | 837 | | | | 838 | |:- |:- | 839 | |  | The Rust source files are located in the `rust` folder…
`rust/app`: Rust application that polls the internal temperature sensor and transmits the sensor data over NB-IoT
If you’re using Visual Embedded Rust...
Overwrite the file `src/lib.rs` by your Visual Program source file
Delete `app_network.rs` and `app_sensor.rs` in the src folder.
Rebuild the application by clicking
`Terminal → Run Task → [2] Build bluepill_my_sensor`
`rust/visual`: Sample Visual Embedded Rust program
`rust/mynewt`: Rust Safe Wrappers for Mynewt OS and libraries
`rust/macros`: Rust Procedural Macros for generating Safe Wrappers, inferring types and other utility macros like `strn!()` 840 | | 841 | 842 | ## OBSOLETE: Typeless Rust 843 | 844 | To making coding easier for beginners, the extension generates [Typeless Rust code like this](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/rust/visual/src/lib.rs)... 845 | 846 | ```rust 847 | #[infer_type] // Infer the missing types 848 | fn start_sensor_listener(sensor_name: _, sensor_key: _, sensor_type: _, poll_time: _) ... 849 | // Call Mynewt API 850 | sensor::set_poll_rate_ms(sensor_name, poll_time) ? ; 851 | ``` 852 | 853 | When the typeless code is compiled, the [`infer_type` Procedural Macro](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/rust/macros/src/infer_type.rs) infers the types by matching the variables against the Mynewt API... 854 | 855 | ```rust 856 | // Call Mynewt API 857 | sensor::set_poll_rate_ms(sensor_name, poll_time) ? ; 858 | // `sensor_name` inferred as type `&Strn` 859 | // `poll_time` inferred as type `u32` 860 | ``` 861 | 862 | The macro then injects the inferred types into the typeless code... 863 | 864 | ```rust 865 | fn start_sensor_listener(sensor_name: &Strn, sensor_key: &'static Strn, 866 | sensor_type: sensor_type_t, poll_time: u32) ... 867 | ``` 868 | 869 | The inferred types are stored in [`infer.json`](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/infer.json). The enables the `infer_type` macro to infer new types based on types already inferred for other functions... 870 | 871 | ```json 872 | "start_sensor_listener": [ 873 | [ "sensor_name", "&Strn" ], 874 | [ "sensor_key", "&'static Strn" ], 875 | [ "sensor_type", "sensor_type_t" ], 876 | [ "poll_time", "u32" ] 877 | ], 878 | "send_sensor_data": [ 879 | [ "sensor_data", "&SensorValue" ] 880 | ], 881 | "handle_sensor_data": [ 882 | [ "sensor_data", "&SensorValue" ] 883 | ] 884 | ``` 885 | 886 | This diagram illustrates the Type Inference… 887 | 888 | 
889 | _How the infer_type macro infers missing types_ 890 | 891 | Here’s an animation (done with Visual Studio Code) that explains how the types were inferred by the `infer_type` macro. At top left are the types to be inferred. At bottom left are the known type signatures from the Mynewt API. 892 | 893 | The `infer_type` macro scans the Typeless Rust program recursively, hence we see the roving red highlight. When the macro finds a match with the Mynewt API, the code flashes green. 894 | 895 | Green ticks at the top left mean that we have successfully inferred the types. 896 | 897 | The recursive Rust code parsing was implemented with the excellent `syn` crate. The `quote` crate was used to emit the transformed Rust code. 898 | 899 | [微博视频](https://weibo.com/7285313566/I2N12aA4W) 900 | 901 | [YouTube Video](https://youtu.be/1SCLlwK5KwE) 902 | 903 | 
904 | _How the infer_type macro infers missing types, animated in Visual Studio Code with the Visual Embedded Rust Extension_ 905 | 906 | More details in the article [_"Advanced Topics for Visual Embedded Rust Programming"_](https://medium.com/@ly.lee/advanced-topics-for-visual-embedded-rust-programming-ebf1627fe397?source=friends_link&sk=01f0ae0e1b82efa9fd6b8e5616c736af) 907 | 908 | ## OBSOLETE: Inside The Visual Embedded Rust Extension for Visual Studio Code 909 | 910 | The source code for the Visual Embedded Rust extension is located at github.com/lupyuen/visual-embedded-rust 911 | 912 | The extension is published in the [Visual Studio Marketplace here](https://marketplace.visualstudio.com/items?itemName=LeeLupYuen.visual-embedded-rust&ssr=false#overview) 913 | 914 | The extension wraps the web-based visual code editor from [Google Blockly](https://developers.google.com/blockly/guides/overview) into a [VSCode WebView](https://code.visualstudio.com/api/extension-guides/webview). Blockly uses XML to represent a visual program. 915 | 916 | The extension is activated when we [edit a Rust source file](https://github.com/lupyuen/visual-embedded-rust/blob/master/package.json#L41-L49) (`*.rs`). [Here’s a sample Rust source file containing a Visual Program](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/rust/visual/src/lib.rs) 917 | 918 | There are two parts of the file… 919 | 920 | 1. __Rust Source Code:__ Which is autogenerated by the Blockly Code Generator from the Blockly XML 921 | 922 | 1. __Blockly XML:__ The XML representation of the visual program. It’s located at the bottom of the source file, marked by `BEGIN BLOCKS … END BLOCKS` 923 | 924 | 
925 | _Logic Flow in the Visual Embedded Rust Extension_ 926 | 927 | 1. Main logic for the VSCode Extension is in [extension.ts](https://github.com/lupyuen/visual-embedded-rust/blob/master/src/extension.ts) 928 | 929 | The extension contains two asset folders: 930 | 931 | [`resources`](https://github.com/lupyuen/visual-embedded-rust/tree/master/resources): Contains a [visual program template](https://github.com/lupyuen/visual-embedded-rust/blob/master/resources/template.rs) that will be used to populate empty Rust source files 932 | 933 | [`media`](https://github.com/lupyuen/visual-embedded-rust/tree/master/media): Contains the Blockly JavaScript code that will be embedded in the WebView to render the visual editor and generate Rust source code… 934 | 935 | [`media/blockly-mynewt-rust`](https://github.com/lupyuen/blockly-mynewt-rust) contains the Blockly JavaScript code with a custom Rust Code Generator 936 | 937 | [`media/closure-library`](https://github.com/google/closure-library) is the Google Closure Library needed by Blockly 938 | 939 | [`media/vscode`](https://github.com/lupyuen/visual-embedded-rust/tree/master/media/vscode) contains JavaScript code that enables VSCode Message Passing in the WebView to implement save/load functions and modal prompts 940 | 941 | 1. The extension creates a [WebView that embeds the HTML and JavaScript code](https://github.com/lupyuen/visual-embedded-rust/blob/master/src/extension.ts#L88-L144) from [Google Blockly](https://developers.google.com/blockly/guides/overview). 942 | 943 | [HTML code for the WebView is here](https://github.com/lupyuen/visual-embedded-rust/blob/master/src/web.ts) 944 | 945 | 1. The VSCode Extension and the WebView are running in [separate JavaScript sandboxes](https://code.visualstudio.com/api/extension-guides/webview#scripts-and-message-passing). 946 | 947 | Hence we’ll be using VSCode Message Passing to communicate between the VSCode Extension and WebView, as we shall soon see… 948 | 949 | 1. [When the WebView loads](https://github.com/lupyuen/visual-embedded-rust/blob/master/media/vscode/storage.js#L59-L71), it notifies the VSCode Extension to fetch the contents of the Rust source file. 950 | 951 | The VSCode Extension responds by [passing the contents of the active Rust source file to the WebView](https://github.com/lupyuen/visual-embedded-rust/blob/master/src/extension.ts#L168-L186) via Message Passing. 952 | 953 | The WebView [extracts the Blockly XML](https://github.com/lupyuen/visual-embedded-rust/blob/master/media/vscode/message.js#L40-L60) embedded in the file contents ([at the bottom](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/rust/visual/src/lib.rs#L159)). The WebView refreshes the Blockly workspace with the Blockly XML. 954 | 955 | If the active Rust source file is empty, the VSCode Extension [populates the file](https://github.com/lupyuen/visual-embedded-rust/blob/master/src/extension.ts#L155-L202) with a [template containing Blockly XML](https://github.com/lupyuen/visual-embedded-rust/blob/master/resources/template.rs) 956 | 957 | 1. When the [visual program is updated](https://github.com/lupyuen/visual-embedded-rust/blob/master/media/vscode/storage.js#L194-L207), the WebView sends the [updated Blockly XML and the generated Rust code](https://github.com/lupyuen/visual-embedded-rust/blob/master/media/vscode/message.js#L79-L89) (via [Message Passing](https://github.com/lupyuen/visual-embedded-rust/blob/master/media/vscode/storage.js#L187-L192)) to the VSCode Extension. 958 | 959 | The extension [updates the Rust document](https://github.com/lupyuen/visual-embedded-rust/blob/master/src/extension.ts#L203-L223) in VSCode with the Blockly XML and generated Rust Code. 960 | 961 | 1. The custom-built Rust Code Generator for Blockly is here… 962 | 963 | github.com/lupyuen/blockly-mynewt-rust/blob/master/generators/rust.js 964 | 965 | github.com/lupyuen/blockly-mynewt-rust/tree/master/generators/rust 966 | 967 | The Rust Code Generator for Blockly is [explained in this article](https://medium.com/@ly.lee/visual-programming-with-embedded-rust-yes-we-can-with-apache-mynewt-and-google-blockly-8b67ef7412d7) 968 | 969 | ## OBSOLETE: Building The Visual Embedded Rust Extension 970 | 971 | To build the extension, two repositories need to be cloned into the media folder: [`blockly-mynewt-rust`](https://github.com/lupyuen/blockly-mynewt-rust) and [`closure-library`](https://github.com/google/closure-library): 972 | 973 | ```bash 974 | cd media 975 | git clone https://github.com/lupyuen/blockly-mynewt-rust 976 | git clone https://github.com/google/closure-library 977 | ``` 978 | 979 | ## OBSOLETE: References 980 | 981 | The following files may be useful for reference… 982 | 983 | - [Disassembly of the Rust Application build](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/libapp-demangle.S) 984 | 985 | - [Disassembly of the Rust Crates](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/rustlib-demangle.S) 986 | 987 | - [Disassembly of the entire firmware](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/my_sensor_app.elf.lst) 988 | 989 | - [Memory map of the firmware](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/blob/rust-nbiot/logs/my_sensor_app.elf.map) 990 | 991 | [Read more about hosting Rust applications on Mynewt](https://medium.com/@ly.lee/hosting-embedded-rust-apps-on-apache-mynewt-with-stm32-blue-pill-c86b119fe5f?source=friends_link&sk=f58f4cf6c608fded4b354063e474a93b) 992 | 993 | ## OBSOLETE: Release Notes 994 | 995 | For changelog refer to... 996 | 997 | 1. [`github.com/lupyuen/visual-embedded-rust/commits/master`](https://github.com/lupyuen/visual-embedded-rust/commits/master) 998 | 999 | 1. [`github.com/lupyuen/blockly-mynewt-rust/commits/master`](https://github.com/lupyuen/blockly-mynewt-rust/commits/master) 1000 | 1001 | 1. [`github.com/lupyuen/stm32bluepill-mynewt-sensor/commits/rust-nbiot`](https://github.com/lupyuen/stm32bluepill-mynewt-sensor/commits/rust-nbiot) 1002 | --------------------------------------------------------------------------------