├── .gitignore
├── LICENSE.txt
├── README.md
├── requirements.txt
└── skill_check
├── __main__.py
├── centeringCurrent.py
├── detection.py
├── filterCreation.py
├── filtering.py
├── mouseNow_Color.py
├── resources
├── Current.png
├── Spacebar.png
├── debug
│ ├── cross.png
│ ├── red.png
│ ├── ring.png
│ └── white.png
├── filtered.png
├── red.png
├── ring.png
└── white.png
└── waitTime.py
/.gitignore:
--------------------------------------------------------------------------------
1 | # Editors
2 | .vscode/
3 |
4 | # Byte-compiled / optimized / DLL files
5 | __pycache__/
6 | *.py[cod]
7 | *$py.class
8 |
9 | pyenv.cfg
--------------------------------------------------------------------------------
/LICENSE.txt:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2021 michaeljhenderson1
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # Functionality
2 | The following program automates the skill checks for https://www.mistersyms.com/tools/gitgud/. Skill checks are quick time events that require fast processing and precision.
3 |
4 | **Disclaimer**:
5 | Please note that this program will **not** run on the game Dead by Daylight.
6 |
7 | [](https://gyazo.com/e88b33dcf4e6a0bcfd8094c5bcaa0a63)
8 |
9 | A skill check is broken down into several components:
10 | * Red tick: Shows the current position of a skill check. When the space key is pressed, the tick's position relative to the other elements will determine the result.
11 | * Great Skill Check: If a skill check ends in the tiny white box, extra points are rewarded, and the skill check is successful.
12 | * Good Skill Check: If a skill check ends in the hollow bar, the skill check is successful.
13 |
14 | The cost of a single failure is far greater than that of a great skill check; hence, the safest solution was selected. The following video shows the results of the skill check bot.
15 |
16 | [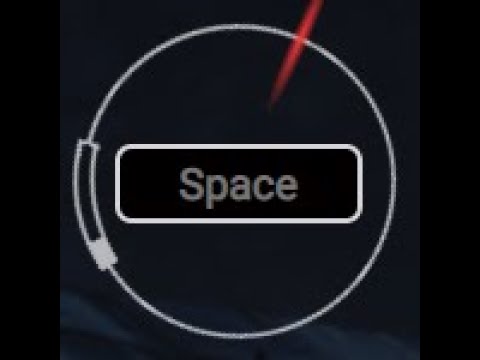](https://youtu.be/JymZaQRRISM)
17 |
18 | # How to Run
19 | For web browsers, Chrome provides the best results. After [installing requirements.txt](https://stackoverflow.com/questions/7225900/how-can-i-install-packages-using-pip-according-to-the-requirements-txt-file-from), the code can be run off of "\_\_main\_\_.py". The program begins to run after an initial 5-second delay. Please have the appropriate web browser and tab selected. Otherwise, the program will be pressing the space key into the selected application. When ready to **stop the program**, press the q key.
20 |
21 | # How the program works
22 |
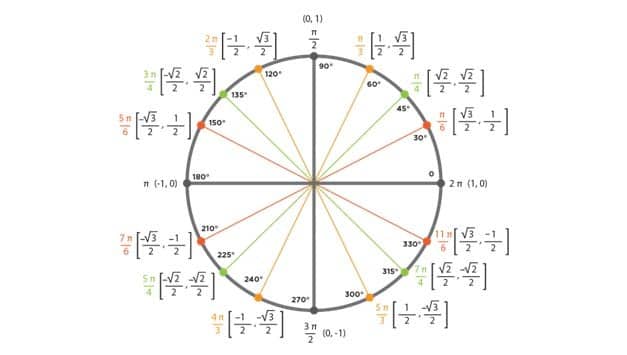
23 | The problem of a skill check is greatly simplified by breaking it down to a unit circle.
24 |
25 |
26 |
27 |
47 |

48 |

49 |
50 |
65 |

66 |
73 |

74 |
 40 |
40 |  42 |
42 |