├── app
├── .idea
│ ├── .name
│ ├── .gitignore
│ ├── compiler.xml
│ ├── vcs.xml
│ ├── gradle.xml
│ ├── jarRepositories.xml
│ └── misc.xml
├── app
│ ├── .gitignore
│ ├── src
│ │ ├── main
│ │ │ ├── res
│ │ │ │ ├── raw
│ │ │ │ │ ├── ping.mp3
│ │ │ │ │ └── beeper.mp3
│ │ │ │ ├── values
│ │ │ │ │ ├── strings.xml
│ │ │ │ │ ├── ic_launcher_background.xml
│ │ │ │ │ ├── colors.xml
│ │ │ │ │ └── themes.xml
│ │ │ │ ├── drawable
│ │ │ │ │ ├── bluetooth.png
│ │ │ │ │ ├── settings.png
│ │ │ │ │ ├── strength0.png
│ │ │ │ │ ├── strength1.png
│ │ │ │ │ ├── strength2.png
│ │ │ │ │ ├── strength3.png
│ │ │ │ │ ├── strength4.png
│ │ │ │ │ └── strength5.png
│ │ │ │ ├── mipmap-hdpi
│ │ │ │ │ ├── ic_launcher.png
│ │ │ │ │ ├── ic_launcher_round.png
│ │ │ │ │ └── ic_launcher_foreground.png
│ │ │ │ ├── mipmap-mdpi
│ │ │ │ │ ├── ic_launcher.png
│ │ │ │ │ ├── ic_launcher_round.png
│ │ │ │ │ └── ic_launcher_foreground.png
│ │ │ │ ├── mipmap-xhdpi
│ │ │ │ │ ├── ic_launcher.png
│ │ │ │ │ ├── ic_launcher_round.png
│ │ │ │ │ └── ic_launcher_foreground.png
│ │ │ │ ├── mipmap-xxhdpi
│ │ │ │ │ ├── ic_launcher.png
│ │ │ │ │ ├── ic_launcher_round.png
│ │ │ │ │ └── ic_launcher_foreground.png
│ │ │ │ ├── mipmap-xxxhdpi
│ │ │ │ │ ├── ic_launcher.png
│ │ │ │ │ ├── ic_launcher_round.png
│ │ │ │ │ └── ic_launcher_foreground.png
│ │ │ │ ├── mipmap-anydpi-v26
│ │ │ │ │ ├── ic_launcher.xml
│ │ │ │ │ └── ic_launcher_round.xml
│ │ │ │ ├── values-night
│ │ │ │ │ └── themes.xml
│ │ │ │ ├── drawable-v24
│ │ │ │ │ └── ic_launcher_foreground.xml
│ │ │ │ └── layout
│ │ │ │ │ └── mqtt_settings_dialog.xml
│ │ │ ├── ic_launcher-playstore.png
│ │ │ ├── cpp
│ │ │ │ ├── bluebridgeapp.cpp
│ │ │ │ └── CMakeLists.txt
│ │ │ ├── AndroidManifest.xml
│ │ │ └── java
│ │ │ │ └── com
│ │ │ │ └── example
│ │ │ │ └── bluebridgeapp
│ │ │ │ ├── Utils.java
│ │ │ │ ├── MqttSettingsDialogFragment.java
│ │ │ │ └── AnchorView.java
│ │ ├── test
│ │ │ └── java
│ │ │ │ └── com
│ │ │ │ └── example
│ │ │ │ └── bluebridgeapp
│ │ │ │ └── ExampleUnitTest.java
│ │ └── androidTest
│ │ │ └── java
│ │ │ └── com
│ │ │ └── example
│ │ │ └── bluebridgeapp
│ │ │ └── ExampleInstrumentedTest.java
│ ├── proguard-rules.pro
│ └── build.gradle
├── gradle
│ └── wrapper
│ │ ├── gradle-wrapper.jar
│ │ └── gradle-wrapper.properties
├── .gitignore
├── build.gradle
├── settings.gradle
├── gradle.properties
├── gradlew.bat
└── gradlew
├── doc
├── .gitignore
└── SMS commands.docx
├── .gitignore
├── components
└── n2klib
│ ├── include
│ ├── n2klib.h
│ ├── N2kCANMsg.h
│ ├── Seasmart.h
│ ├── N2kDef.h
│ ├── N2kStream.h
│ ├── NMEA2000_CompilerDefns.h
│ ├── NMEA2000_esp32.h
│ ├── ActisenseReader.h
│ ├── RingBuffer.h
│ ├── N2kMessagesEnumToStr.h
│ ├── N2kGroupFunctionDefaultHandlers.h
│ └── N2kMaretron.h
│ ├── CMakeLists.txt
│ ├── N2kStream.cpp
│ ├── N2kMaretron.cpp
│ ├── Seasmart.cpp
│ └── ActisenseReader.cpp
├── hw
├── .gitignore
├── bom.xlsx
├── BlueBridge.pcb
├── BlueBridge.prj
├── BlueBridge.sch
├── BlueBridge - PCB.pdf
└── BlueBridge - Project.pdf
├── website
├── reativeAngleBg.bmp
└── images
│ ├── strength0.png
│ ├── strength1.png
│ ├── strength2.png
│ ├── strength3.png
│ ├── strength4.png
│ ├── strength5.png
│ ├── zoomIn_blur.png
│ ├── zoomIn_focus.png
│ ├── zoomOut_blur.png
│ └── zoomOut_focus.png
├── CMakeLists.txt
├── sdkconfig.defaults
├── main
├── CMakeLists.txt
├── pdu.h
├── timer.h
├── publisher.h
├── led.h
├── temperature_sensor.h
├── timer.c
├── flash.h
├── pressure_sensor.h
├── property_parser.h
├── flash.c
├── wmm.h
├── serial.h
├── sms.h
├── led.c
├── spp_acceptor.h
├── serial.c
├── util.h
├── property_parser.c
├── WMM_COF.c
├── temperature_sensor.c
├── util.c
├── sms.c
└── modem_interface.h
├── LICENSE
└── README.md
/app/.idea/.name:
--------------------------------------------------------------------------------
1 | BlueBridgeApp
--------------------------------------------------------------------------------
/app/app/.gitignore:
--------------------------------------------------------------------------------
1 | /build
--------------------------------------------------------------------------------
/doc/.gitignore:
--------------------------------------------------------------------------------
1 | html/
2 |
--------------------------------------------------------------------------------
/.gitignore:
--------------------------------------------------------------------------------
1 | build/
2 | sdkconfig
3 |
--------------------------------------------------------------------------------
/components/n2klib/include/n2klib.h:
--------------------------------------------------------------------------------
1 | void func(void);
2 |
--------------------------------------------------------------------------------
/hw/.gitignore:
--------------------------------------------------------------------------------
1 | ~BlueBridge.pcb
2 | ~BlueBridge.sch
3 | *.txt
4 | *.mop
5 |
--------------------------------------------------------------------------------
/hw/bom.xlsx:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/hw/bom.xlsx
--------------------------------------------------------------------------------
/app/.idea/.gitignore:
--------------------------------------------------------------------------------
1 | # Default ignored files
2 | /shelf/
3 | /workspace.xml
4 |
--------------------------------------------------------------------------------
/hw/BlueBridge.pcb:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/hw/BlueBridge.pcb
--------------------------------------------------------------------------------
/hw/BlueBridge.prj:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/hw/BlueBridge.prj
--------------------------------------------------------------------------------
/hw/BlueBridge.sch:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/hw/BlueBridge.sch
--------------------------------------------------------------------------------
/doc/SMS commands.docx:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/doc/SMS commands.docx
--------------------------------------------------------------------------------
/hw/BlueBridge - PCB.pdf:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/hw/BlueBridge - PCB.pdf
--------------------------------------------------------------------------------
/website/reativeAngleBg.bmp:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/reativeAngleBg.bmp
--------------------------------------------------------------------------------
/hw/BlueBridge - Project.pdf:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/hw/BlueBridge - Project.pdf
--------------------------------------------------------------------------------
/website/images/strength0.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/strength0.png
--------------------------------------------------------------------------------
/website/images/strength1.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/strength1.png
--------------------------------------------------------------------------------
/website/images/strength2.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/strength2.png
--------------------------------------------------------------------------------
/website/images/strength3.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/strength3.png
--------------------------------------------------------------------------------
/website/images/strength4.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/strength4.png
--------------------------------------------------------------------------------
/website/images/strength5.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/strength5.png
--------------------------------------------------------------------------------
/website/images/zoomIn_blur.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/zoomIn_blur.png
--------------------------------------------------------------------------------
/website/images/zoomIn_focus.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/zoomIn_focus.png
--------------------------------------------------------------------------------
/website/images/zoomOut_blur.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/zoomOut_blur.png
--------------------------------------------------------------------------------
/app/app/src/main/res/raw/ping.mp3:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/raw/ping.mp3
--------------------------------------------------------------------------------
/app/app/src/main/res/values/strings.xml:
--------------------------------------------------------------------------------
1 |
2 | Blue Bridge
3 |
--------------------------------------------------------------------------------
/website/images/zoomOut_focus.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/website/images/zoomOut_focus.png
--------------------------------------------------------------------------------
/app/app/src/main/res/raw/beeper.mp3:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/raw/beeper.mp3
--------------------------------------------------------------------------------
/app/gradle/wrapper/gradle-wrapper.jar:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/gradle/wrapper/gradle-wrapper.jar
--------------------------------------------------------------------------------
/app/app/src/main/ic_launcher-playstore.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/ic_launcher-playstore.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/bluetooth.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/bluetooth.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/settings.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/settings.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/strength0.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/strength0.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/strength1.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/strength1.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/strength2.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/strength2.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/strength3.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/strength3.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/strength4.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/strength4.png
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable/strength5.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/drawable/strength5.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-hdpi/ic_launcher.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-hdpi/ic_launcher.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-mdpi/ic_launcher.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-mdpi/ic_launcher.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xhdpi/ic_launcher.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xhdpi/ic_launcher.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xxhdpi/ic_launcher.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xxhdpi/ic_launcher.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xxxhdpi/ic_launcher.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xxxhdpi/ic_launcher.png
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 3.5)
2 | add_compile_definitions(ESP32)
3 | include($ENV{IDF_PATH}/tools/cmake/project.cmake)
4 | project(BlueBridge)
5 |
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-hdpi/ic_launcher_round.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-hdpi/ic_launcher_round.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-mdpi/ic_launcher_round.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-mdpi/ic_launcher_round.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xhdpi/ic_launcher_round.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xhdpi/ic_launcher_round.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xxhdpi/ic_launcher_round.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xxhdpi/ic_launcher_round.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xxxhdpi/ic_launcher_round.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xxxhdpi/ic_launcher_round.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-hdpi/ic_launcher_foreground.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-hdpi/ic_launcher_foreground.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-mdpi/ic_launcher_foreground.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-mdpi/ic_launcher_foreground.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xhdpi/ic_launcher_foreground.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xhdpi/ic_launcher_foreground.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xxhdpi/ic_launcher_foreground.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xxhdpi/ic_launcher_foreground.png
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-xxxhdpi/ic_launcher_foreground.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/miniwinwm/BlueBridge/HEAD/app/app/src/main/res/mipmap-xxxhdpi/ic_launcher_foreground.png
--------------------------------------------------------------------------------
/app/app/src/main/res/values/ic_launcher_background.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | #FFFFFF
4 |
--------------------------------------------------------------------------------
/app/.idea/compiler.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
--------------------------------------------------------------------------------
/app/.idea/vcs.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
--------------------------------------------------------------------------------
/app/gradle/wrapper/gradle-wrapper.properties:
--------------------------------------------------------------------------------
1 | #Thu Mar 03 19:03:20 GMT 2022
2 | distributionBase=GRADLE_USER_HOME
3 | distributionUrl=https\://services.gradle.org/distributions/gradle-7.2-bin.zip
4 | distributionPath=wrapper/dists
5 | zipStorePath=wrapper/dists
6 | zipStoreBase=GRADLE_USER_HOME
7 |
--------------------------------------------------------------------------------
/app/.gitignore:
--------------------------------------------------------------------------------
1 | *.iml
2 | .gradle
3 | /local.properties
4 | /.idea/caches
5 | /.idea/libraries
6 | /.idea/modules.xml
7 | /.idea/workspace.xml
8 | /.idea/navEditor.xml
9 | /.idea/assetWizardSettings.xml
10 | .DS_Store
11 | /build
12 | /captures
13 | .externalNativeBuild
14 | .cxx
15 | local.properties
16 |
--------------------------------------------------------------------------------
/app/app/src/main/cpp/bluebridgeapp.cpp:
--------------------------------------------------------------------------------
1 | // Write C++ code here.
2 | //
3 | // Do not forget to dynamically load the C++ library into your application.
4 | //
5 | // For instance,
6 | //
7 | // In MainActivity.java:
8 | // static {
9 | // System.loadLibrary("bluebridgeapp");
10 | // }
11 |
12 |
13 |
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-anydpi-v26/ic_launcher.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
--------------------------------------------------------------------------------
/app/app/src/main/res/mipmap-anydpi-v26/ic_launcher_round.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
--------------------------------------------------------------------------------
/app/build.gradle:
--------------------------------------------------------------------------------
1 | // Top-level build file where you can add configuration options common to all sub-projects/modules.
2 | plugins {
3 | id 'com.android.application' version '7.1.2' apply false
4 | id 'com.android.library' version '7.1.2' apply false
5 | }
6 |
7 | task clean(type: Delete) {
8 | delete rootProject.buildDir
9 | }
--------------------------------------------------------------------------------
/sdkconfig.defaults:
--------------------------------------------------------------------------------
1 | CONFIG_BT_ENABLED=y
2 | CONFIG_BTDM_CTRL_MODE_BLE_ONLY=n
3 | CONFIG_BTDM_CTRL_MODE_BR_EDR_ONLY=y
4 | CONFIG_BTDM_CTRL_MODE_BTDM=n
5 | CONFIG_BT_CLASSIC_ENABLED=y
6 | CONFIG_WIFI_ENABLED=n
7 | CONFIG_BT_SPP_ENABLED=y
8 | CONFIG_BT_BLE_ENABLED=n
9 | CONFIG_FREERTOS_HZ=1000
10 | CONFIG_FREERTOS_TIMER_TASK_STACK_DEPTH=32768
--------------------------------------------------------------------------------
/app/settings.gradle:
--------------------------------------------------------------------------------
1 | pluginManagement {
2 | repositories {
3 | gradlePluginPortal()
4 | google()
5 | mavenCentral()
6 | }
7 | }
8 | dependencyResolutionManagement {
9 | repositoriesMode.set(RepositoriesMode.PREFER_SETTINGS)
10 | repositories {
11 | google()
12 | mavenCentral()
13 | }
14 | }
15 | rootProject.name = "BlueBridgeApp"
16 | include ':app'
17 |
--------------------------------------------------------------------------------
/app/app/src/main/res/values/colors.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | #FFBB86FC
4 | #FF6200EE
5 | #FF3700B3
6 | #FF03DAC5
7 | #FF018786
8 | #FF000000
9 | #FFFFFFFF
10 |
--------------------------------------------------------------------------------
/app/app/src/test/java/com/example/bluebridgeapp/ExampleUnitTest.java:
--------------------------------------------------------------------------------
1 | package com.example.bluebridgeapp;
2 |
3 | import org.junit.Test;
4 |
5 | import static org.junit.Assert.*;
6 |
7 | /**
8 | * Example local unit test, which will execute on the development machine (host).
9 | *
10 | * @see Testing documentation
11 | */
12 | public class ExampleUnitTest {
13 | @Test
14 | public void addition_isCorrect() {
15 | assertEquals(4, 2 + 2);
16 | }
17 | }
--------------------------------------------------------------------------------
/main/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | idf_component_register(SRCS "main.cpp"
2 | "pressure_sensor.c"
3 | "serial.c"
4 | "spp_acceptor.c"
5 | "flash.c"
6 | "nmea.c"
7 | "timer.c"
8 | "wmm.c"
9 | "WMM_COF.c"
10 | "modem.c"
11 | "modem_interface.c"
12 | "mqtt.c"
13 | "publisher.c"
14 | "pdu.c"
15 | "settings.c"
16 | "property_parser.c"
17 | "sms.c"
18 | "util.c"
19 | "led.c"
20 | "temperature_sensor.c"
21 | INCLUDE_DIRS ".")
22 |
--------------------------------------------------------------------------------
/components/n2klib/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | idf_component_register(SRCS "nmea2000_esp32.cpp"
2 | "nmea2000.cpp"
3 | "N2kMsg.cpp"
4 | "N2kStream.cpp"
5 | "N2kMessages.cpp"
6 | "Seasmart.cpp"
7 | "N2kDeviceList.cpp"
8 | "N2kGroupFunction.cpp"
9 | "N2kGroupFunctionDefaultHandlers.cpp"
10 | "N2kMaretron.cpp"
11 | INCLUDE_DIRS "include"
12 | REQUIRES "driver"
13 | PRIV_REQUIRES "esp_timer")
14 |
--------------------------------------------------------------------------------
/app/.idea/gradle.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
19 |
20 |
--------------------------------------------------------------------------------
/app/app/proguard-rules.pro:
--------------------------------------------------------------------------------
1 | # Add project specific ProGuard rules here.
2 | # You can control the set of applied configuration files using the
3 | # proguardFiles setting in build.gradle.
4 | #
5 | # For more details, see
6 | # http://developer.android.com/guide/developing/tools/proguard.html
7 |
8 | # If your project uses WebView with JS, uncomment the following
9 | # and specify the fully qualified class name to the JavaScript interface
10 | # class:
11 | #-keepclassmembers class fqcn.of.javascript.interface.for.webview {
12 | # public *;
13 | #}
14 |
15 | # Uncomment this to preserve the line number information for
16 | # debugging stack traces.
17 | #-keepattributes SourceFile,LineNumberTable
18 |
19 | # If you keep the line number information, uncomment this to
20 | # hide the original source file name.
21 | #-renamesourcefileattribute SourceFile
--------------------------------------------------------------------------------
/app/app/src/main/res/values/themes.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
16 |
--------------------------------------------------------------------------------
/app/app/src/main/res/values-night/themes.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
16 |
--------------------------------------------------------------------------------
/app/app/src/androidTest/java/com/example/bluebridgeapp/ExampleInstrumentedTest.java:
--------------------------------------------------------------------------------
1 | package com.example.bluebridgeapp;
2 |
3 | import android.content.Context;
4 |
5 | import androidx.test.platform.app.InstrumentationRegistry;
6 | import androidx.test.ext.junit.runners.AndroidJUnit4;
7 |
8 | import org.junit.Test;
9 | import org.junit.runner.RunWith;
10 |
11 | import static org.junit.Assert.*;
12 |
13 | /**
14 | * Instrumented test, which will execute on an Android device.
15 | *
16 | * @see Testing documentation
17 | */
18 | @RunWith(AndroidJUnit4.class)
19 | public class ExampleInstrumentedTest {
20 | @Test
21 | public void useAppContext() {
22 | // Context of the app under test.
23 | Context appContext = InstrumentationRegistry.getInstrumentation().getTargetContext();
24 | assertEquals("com.example.bluebridgeapp", appContext.getPackageName());
25 | }
26 | }
--------------------------------------------------------------------------------
/app/.idea/jarRepositories.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2022 John Blaiklock
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | The user of this code is not a citizen, business or resident of Russia or Belarus.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
--------------------------------------------------------------------------------
/app/app/src/main/AndroidManifest.xml:
--------------------------------------------------------------------------------
1 |
2 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
17 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
--------------------------------------------------------------------------------
/main/pdu.h:
--------------------------------------------------------------------------------
1 | // Copyright 2011 The Avalon Project Authors. All rights reserved.
2 | // Use of this source code is governed by the Apache License 2.0
3 | // that can be found in the LICENSE file.
4 | #ifndef SMS_PDU_H_
5 | #define SMS_PDU_H_
6 |
7 | #ifdef __cplusplus
8 | extern "C" {
9 | #endif
10 |
11 | #include
12 |
13 | enum { SMS_MAX_PDU_LENGTH = 256 };
14 |
15 | /*
16 | * Encode an SMS message. Output the encoded message into output pdu buffer.
17 | * Returns the length of the SMS encoded message in the output buffer or
18 | * a negative number in case encoding failed (for example provided output buffer
19 | * does not have enough space).
20 | */
21 | int pdu_encode(const char* service_center_number, const char* phone_number, const char* text,
22 | unsigned char* pdu, int pdu_size);
23 |
24 | /*
25 | * Decode an SMS message. Output the decoded message into the sms text buffer.
26 | * Returns the length of the SMS decoded message or a negative number in
27 | * case decoding failed (for example provided output buffer has not enough
28 | * space).
29 | */
30 | int pdu_decode(const unsigned char* pdu, int pdu_len,
31 | time_t* sms_time,
32 | char* phone_number, int phone_number_size,
33 | char* text, int text_size);
34 |
35 | #ifdef __cplusplus
36 | }
37 | #endif
38 |
39 | #endif // SMS_SMS_H_
--------------------------------------------------------------------------------
/app/gradle.properties:
--------------------------------------------------------------------------------
1 | # Project-wide Gradle settings.
2 | # IDE (e.g. Android Studio) users:
3 | # Gradle settings configured through the IDE *will override*
4 | # any settings specified in this file.
5 | # For more details on how to configure your build environment visit
6 | # http://www.gradle.org/docs/current/userguide/build_environment.html
7 | # Specifies the JVM arguments used for the daemon process.
8 | # The setting is particularly useful for tweaking memory settings.
9 | org.gradle.jvmargs=-Xmx2048m -Dfile.encoding=UTF-8
10 | # When configured, Gradle will run in incubating parallel mode.
11 | # This option should only be used with decoupled projects. More details, visit
12 | # http://www.gradle.org/docs/current/userguide/multi_project_builds.html#sec:decoupled_projects
13 | # org.gradle.parallel=true
14 | # AndroidX package structure to make it clearer which packages are bundled with the
15 | # Android operating system, and which are packaged with your app"s APK
16 | # https://developer.android.com/topic/libraries/support-library/androidx-rn
17 | android.useAndroidX=true
18 | # Enables namespacing of each library's R class so that its R class includes only the
19 | # resources declared in the library itself and none from the library's dependencies,
20 | # thereby reducing the size of the R class for that library
21 | android.nonTransitiveRClass=true
--------------------------------------------------------------------------------
/app/app/build.gradle:
--------------------------------------------------------------------------------
1 | plugins {
2 | id 'com.android.application'
3 | }
4 |
5 | android {
6 | compileSdk 32
7 |
8 | defaultConfig {
9 | applicationId "com.example.bluebridgeapp"
10 | minSdk 21
11 | targetSdk 32
12 | versionCode 1
13 | versionName "1.0"
14 |
15 | testInstrumentationRunner "androidx.test.runner.AndroidJUnitRunner"
16 | externalNativeBuild {
17 | cmake {
18 | cppFlags ''
19 | }
20 | }
21 | }
22 |
23 | buildTypes {
24 | release {
25 | minifyEnabled false
26 | proguardFiles getDefaultProguardFile('proguard-android-optimize.txt'), 'proguard-rules.pro'
27 | }
28 | }
29 | compileOptions {
30 | sourceCompatibility JavaVersion.VERSION_1_8
31 | targetCompatibility JavaVersion.VERSION_1_8
32 | }
33 | externalNativeBuild {
34 | cmake {
35 | path file('src/main/cpp/CMakeLists.txt')
36 | version '3.18.1'
37 | }
38 | }
39 | packagingOptions {
40 | exclude 'META-INF/INDEX.LIST'
41 | exclude 'META-INF/io.netty.versions.properties'
42 | }
43 | }
44 |
45 | dependencies {
46 | implementation 'com.hivemq:hivemq-mqtt-client:1.3.0'
47 | implementation 'androidx.appcompat:appcompat:1.4.1'
48 | implementation 'com.google.android.material:material:1.5.0'
49 | implementation 'androidx.constraintlayout:constraintlayout:2.1.3'
50 | testImplementation 'junit:junit:4.13.2'
51 | androidTestImplementation 'androidx.test.ext:junit:1.1.3'
52 | androidTestImplementation 'androidx.test.espresso:espresso-core:3.4.0'
53 | }
--------------------------------------------------------------------------------
/app/.idea/misc.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
--------------------------------------------------------------------------------
/app/app/src/main/res/drawable-v24/ic_launcher_foreground.xml:
--------------------------------------------------------------------------------
1 |
7 |
9 |
10 |
16 |
2 |  3 |
3 |
4 | Blue Bridge
5 |
6 | 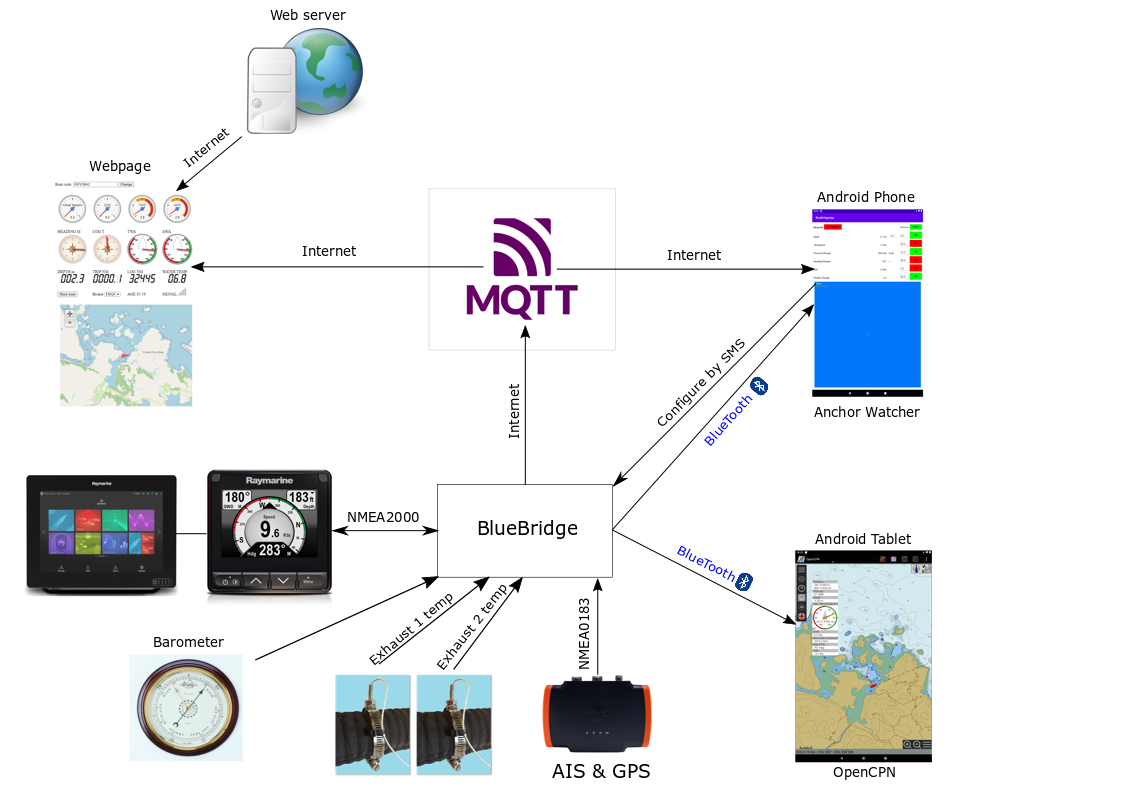 7 |
7 |
8 |
9 | The Blue Bridge project is a hardware device, embedded software, an Android application and a webpage for sharing of boat data to allow remote monitoring and anchor watching. Boat data are received from the boat's instruments via NMEA2000 and NMEA0183 connections and are then distributed via Bluetooth to local recipients or via the internet for remote recipients with internet access. Also included in the hardware are: an atmospheric pressure sensor which is shared both with the data recipients via Bluetooth and the internet and also the boat's NMEA2000 data network, and connections for a pair of PT-1000 sensors which measure the temperature inside 2 exhaust gas pipes the values of which are distrubted via NMEA2000.
10 |
11 | For local recipients the boat data are converted to NMEA0183 format and sent via a Bluetooth link to a local device. This could be a laptop, tablet or phone running a navigation software package (the format of the data are tailored for OpenCPN but will work with other navigation packages). Another recipient of the boat data over Bluetooth can be the Android anchor watching app that is part of this project.
12 |
13 | For remote recipients the boat data are sent out using a GSM modem with a data connection to a server on the internet. This server is a MQTT broker from which other internet connected devices can receive the data. Remote recipients of the data can be a webpage included as part of this project or the same Android anchor watching app mentioned above using an internet connection rather than a Bluetooth one. This allows remote monitoring of the boat's instruments and position using the webpage or
14 | remote anchor watching using the Android application.
15 |
16 | The diagram above shows the various connections. The hardware device has no user interface so is configured via SMS messages from any mobile phone. Details of these messages are under the docs folder.
17 |
18 | This is the webpage that is found under the webpage folder above:
19 |
20 | http://miniwinwm.000webhostapp.com/
21 |
22 | This is the Android anchor watching app found under the app folder above built with Android Studio:
23 |
24 | 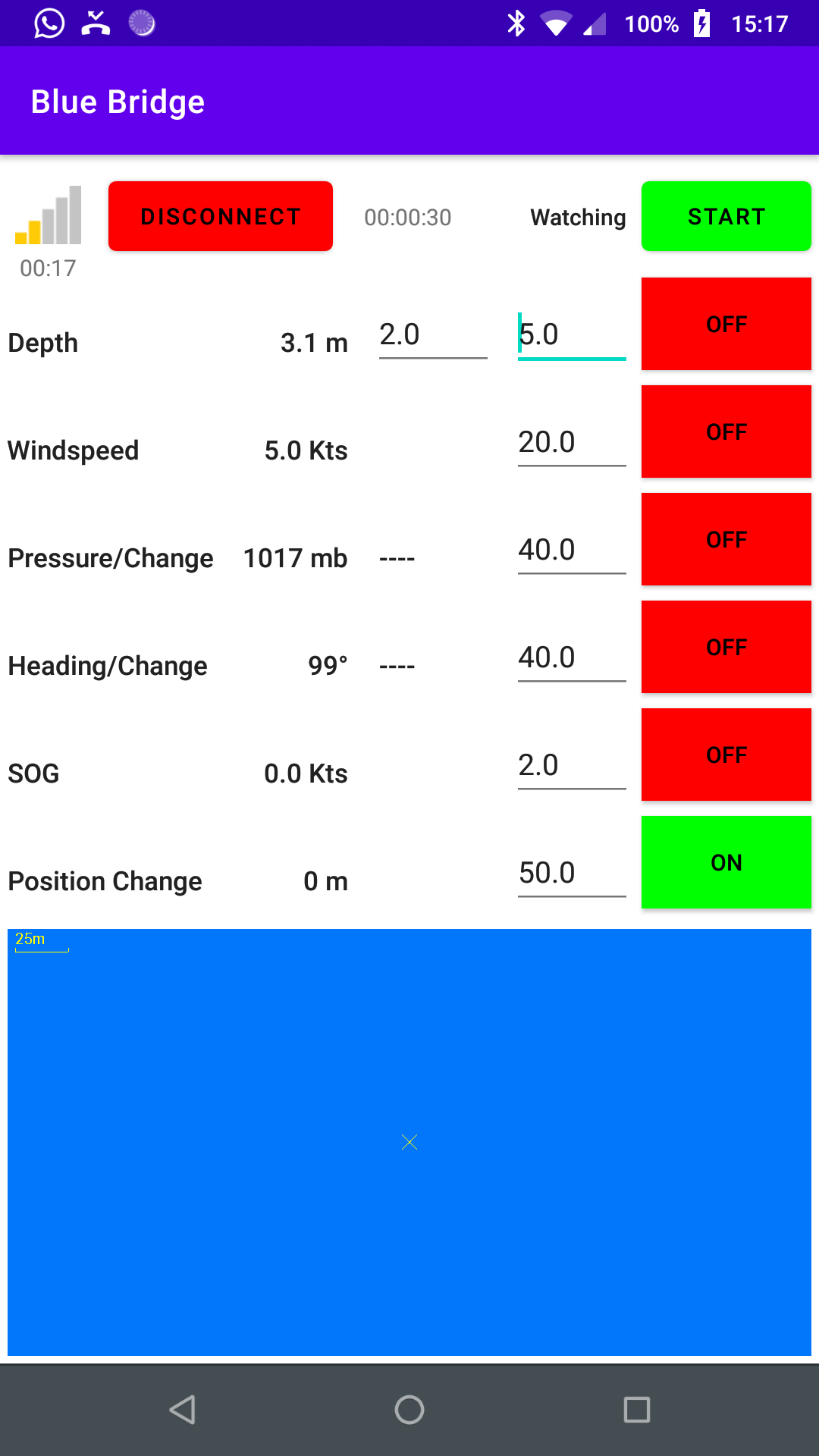 25 |
25 |
26 |
27 | This project using custom hardware running an ESP32 based DevKitC board. In addition to this are the following daughter boards: a BMP280 pressure sensor board, a SIM800L GSM modem board and a modem power supply board. The schematic and PCB layout are created in DesignSpark from RS. All hardware design files are found under the hw folder above. This is the hardware as assembled:
28 |
29 |  30 |
30 |
31 | Software development for the ESP32 is done using the Espressif ESP-IDF development environment. Currently the following data items are received by the NMEA2000 connection: depth, log, trip, boatspeed, wind direction, wind speed, GPS position, SoG, CoG, water temperature. The following data items are recived by the NMEA0183 connection: GPS position, SoG, CoG, AIS data. Either interface could be extended to receive further data items.
32 |
33 | This project has now reached first release and has been tested on a boat with a Raymarine NMEA2000/STNG based system. Bug fixing and minor changes and feature additions may still occur. To see a list of outstanding work and changes to come see todo.txt.
34 |
35 | Future additions: The latest hardware design has the option of fitting a RF transceiver module. This could be used to implement communication with a wireless remote control for an autopilot.
36 |
--------------------------------------------------------------------------------
/main/serial.c:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | /***************
28 | *** INCLUDES ***
29 | ***************/
30 |
31 | #include "driver/uart.h"
32 | #include "driver/gpio.h"
33 | #include "serial.h"
34 | #include "spp_acceptor.h"
35 |
36 | /**************
37 | *** DEFINES ***
38 | **************/
39 |
40 | /************
41 | *** TYPES ***
42 | ************/
43 |
44 | /********************************
45 | *** LOCAL FUNCTION PROTOTYPES ***
46 | ********************************/
47 |
48 | /**********************
49 | *** LOCAL VARIABLES ***
50 | **********************/
51 |
52 | /***********************
53 | *** GLOBAL VARIABLES ***
54 | ***********************/
55 |
56 | /****************
57 | *** CONSTANTS ***
58 | ****************/
59 |
60 | /**********************
61 | *** LOCAL FUNCTIONS ***
62 | **********************/
63 |
64 | /***********************
65 | *** GLOBAL FUNCTIONS ***
66 | ***********************/
67 |
68 | void serial_init(uint32_t baud_rate_1, uint32_t baud_rate_2)
69 | {
70 | (void)baud_rate_2;
71 |
72 | spp_init();
73 |
74 | uart_config_t uart_config =
75 | {
76 | .baud_rate = baud_rate_1,
77 | .data_bits = UART_DATA_8_BITS,
78 | .parity = UART_PARITY_DISABLE,
79 | .stop_bits = UART_STOP_BITS_1,
80 | .flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
81 | .source_clk = UART_SCLK_APB,
82 | };
83 |
84 | uart_driver_install(UART_NUM_2, 2048, 2048, 0, NULL, 0);
85 | uart_param_config(UART_NUM_2, &uart_config);
86 | uart_set_pin(UART_NUM_2, GPIO_NUM_17, GPIO_NUM_16, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
87 | }
88 |
89 | size_t serial_1_send_data(size_t length, const uint8_t *data)
90 | {
91 | return (size_t)uart_tx_chars(UART_NUM_2, (const char *)data, (uint32_t)length);
92 | }
93 |
94 | size_t serial_1_read_data(size_t buffer_length, uint8_t *data)
95 | {
96 | size_t bytes_available;
97 | size_t bytes_read;
98 |
99 | uart_get_buffered_data_len(UART_NUM_2, &bytes_available);
100 |
101 | if (bytes_available <= buffer_length)
102 | {
103 | bytes_read = (size_t)uart_read_bytes(UART_NUM_2, (void *)data, (uint32_t)bytes_available, (TickType_t)1);
104 | }
105 | else
106 | {
107 | bytes_read = (size_t)uart_read_bytes(UART_NUM_2, (void *)data, (uint32_t)buffer_length, (TickType_t)1);
108 | }
109 |
110 | return bytes_read;
111 | }
112 |
113 | size_t serial_2_send_data(size_t length, const uint8_t *data)
114 | {
115 | spp_write(data, length);
116 |
117 | return length;
118 | }
119 |
120 | size_t serial_2_read_data(size_t buffer_length, uint8_t *data)
121 | {
122 | size_t bytes_available;
123 | size_t bytes_to_read;
124 | size_t i;
125 | int result;
126 |
127 | bytes_available = spp_bytes_received_size();
128 |
129 | if (bytes_available <= buffer_length)
130 | {
131 | bytes_to_read = bytes_available;
132 | }
133 | else
134 | {
135 | bytes_to_read = buffer_length;
136 | }
137 |
138 | for (i = (size_t)0; i < bytes_to_read; i++)
139 | {
140 | result = spp_read();
141 | if (result == -1)
142 | {
143 | return i;
144 | }
145 |
146 | data[i] = (uint8_t)result;
147 | }
148 |
149 | return bytes_to_read;
150 | }
151 |
--------------------------------------------------------------------------------
/main/util.h:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | #ifndef UTIL_H
28 | #define UTIL_H
29 |
30 | #ifdef __cplusplus
31 | extern "C" {
32 | #endif
33 |
34 | /***************
35 | *** INCLUDES ***
36 | ***************/
37 |
38 | #include
39 | #include
40 |
41 | /**************
42 | *** DEFINES ***
43 | **************/
44 |
45 | /************
46 | *** TYPES ***
47 | ************/
48 |
49 | /*************************
50 | *** EXTERNAL VARIABLES ***
51 | *************************/
52 |
53 | /***************************
54 | *** FUNCTIONS PROTOTYPES ***
55 | ***************************/
56 |
57 | /**
58 | * Remove traiing whitespace from a string
59 | *
60 | * @param str The string to remove trailing whitespace from
61 | */
62 | void trim_trailing_ws(char *str);
63 |
64 | /**
65 | * Convert a hex number in upper or lower case to an int. No leading 0x.
66 | *
67 | * @param s The string containing the hex number
68 | * @return The converted number
69 | */
70 | uint32_t util_htoi(const char *s);
71 |
72 | /**
73 | * Replace every instance of a character in a string with another
74 | *
75 | * @param s The string to replace characters in
76 | * @param orig The character to replace
77 | * @param rep The character to replace with
78 | */
79 | void util_replace_char(char *s, char orig, char rep);
80 |
81 | /**
82 | * Replace each lower case character with its upper case equivalent
83 | *
84 | * @param s String contaiining the characters to check and replace
85 | * @return The inpur string or NULL if the input string is NULL
86 | */
87 | char *util_capitalize_string(char *s);
88 |
89 | /**
90 | * Convert a seconds value to a text representation in format xxhyymzzs
91 | *
92 | * @param seconds The input time to convert in seconds
93 | * @return The converted text value
94 | * @note This function is not thread safer
95 | */
96 | char *util_seconds_to_hms(uint32_t seconds);
97 |
98 | /**
99 | * Parse a text hour/minute/second value in xxhyymzzs format to an integer of the total number of seconds
100 | *
101 | * @param hms String containing the value to convert. Must contain at least a number and an h, m or s. The letters h, m and s must be in that order.
102 | * @param result Pointer to value to hold result
103 | * @return If successful true else false
104 | */
105 | bool util_hms_to_seconds(const char *hms, uint32_t *result);
106 |
107 | /**
108 | * Simple hash function of ASCII string using the DJB2 algorithm
109 | *
110 | * @param str The string to hash
111 | * @return The hash value
112 | */
113 | uint32_t util_hash_djb2(const char *str);
114 |
115 | /**
116 | * Perform a safe equivalent of strcat
117 | *
118 | * @param dest Buffer to hold the concatenated string
119 | * @param size Size in bytes of dest
120 | * @param src The source string to append to what already exists in dest
121 | * @return true if string concatenated successfully
122 | */
123 | bool util_safe_strcat(char *dest, size_t size, const char *src);
124 |
125 | /**
126 | * Perform a safe equivalent of strcpy.
127 | *
128 | * @param dest Pointer to destination string
129 | * @param size The size of the dest buffer
130 | * @param src Pointer to source string to copy
131 | */
132 | bool util_safe_strcpy(char *dest, size_t size, const char *src);
133 |
134 | #ifdef __cplusplus
135 | }
136 | #endif
137 |
138 | #endif
--------------------------------------------------------------------------------
/main/property_parser.c:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | /***************
28 | *** INCLUDES ***
29 | ***************/
30 |
31 | #include
32 | #include "property_parser.h"
33 |
34 | /**************
35 | *** DEFINES ***
36 | **************/
37 |
38 | /************
39 | *** TYPES ***
40 | ************/
41 |
42 | /**
43 | * Parser state machine states
44 | */
45 | typedef enum
46 | {
47 | NOT_STARTED, ///< Not started in a new key/value or command
48 | IN_KEY, ///< In a key or command
49 | RECEIVED_EQUALS, ///< Received a = between key and value
50 | IN_VALUE, ///< In a value
51 | } parse_state_t;
52 |
53 | /********************************
54 | *** LOCAL FUNCTION PROTOTYPES ***
55 | ********************************/
56 |
57 | /**********************
58 | *** LOCAL VARIABLES ***
59 | **********************/
60 |
61 | /***********************
62 | *** GLOBAL VARIABLES ***
63 | ***********************/
64 |
65 | /****************
66 | *** CONSTANTS ***
67 | ****************/
68 |
69 | /**********************
70 | *** LOCAL FUNCTIONS ***
71 | **********************/
72 |
73 | /***********************
74 | *** GLOBAL FUNCTIONS ***
75 | ***********************/
76 |
77 | uint16_t property_parse(char *str, parser_callback_t parser_callback)
78 | {
79 | char *key = "";
80 | char *value = "";
81 | uint16_t c;
82 | parse_state_t parse_state;
83 | uint16_t found = 0U;
84 |
85 | if (str == NULL || parser_callback == NULL)
86 | {
87 | return 0U;
88 | }
89 |
90 | size_t len = strlen(str);
91 |
92 | if (len == (size_t)0)
93 | {
94 | return 0U;
95 | }
96 |
97 | c = 0U;
98 | parse_state = NOT_STARTED;
99 | while (true)
100 | {
101 | if (c == len)
102 | {
103 | break;
104 | }
105 |
106 | if (parse_state == NOT_STARTED)
107 | {
108 | if (str[c] == '=' || str[c] == '\r' || str[c] == '\n')
109 | {
110 | c++;
111 | continue;
112 | }
113 |
114 | key = &str[c];
115 | parse_state = IN_KEY;
116 | c++;
117 | continue;
118 | }
119 | else if (parse_state == IN_KEY)
120 | {
121 | if (str[c] == '\r' || str[c] == '\n')
122 | {
123 | parse_state = NOT_STARTED;
124 | str[c] = '\0';
125 |
126 | if (strlen(key) > (size_t)0)
127 | {
128 | found++;
129 | parser_callback(key, "");
130 | }
131 | key = "";
132 | }
133 | else if (str[c] == '=')
134 | {
135 | str[c] = '\0';
136 | parse_state = RECEIVED_EQUALS;
137 | }
138 | c++;
139 | continue;
140 | }
141 | else if (parse_state == RECEIVED_EQUALS)
142 | {
143 | if (str[c] == '\n' || str[c] == '\r')
144 | {
145 | key = "";
146 | parse_state = NOT_STARTED;
147 | }
148 | else
149 | {
150 | parse_state = IN_VALUE;
151 | value = &str[c];
152 | }
153 | c++;
154 | continue;
155 | }
156 | else if (parse_state == IN_VALUE)
157 | {
158 | if (str[c] == '\r' || str[c] == '\n')
159 | {
160 | parse_state = NOT_STARTED;
161 | str[c] = '\0';
162 |
163 | if (strlen(key) > (size_t)0 && strlen(value) > (size_t)0)
164 | {
165 | found++;
166 | parser_callback(key, value);
167 | }
168 |
169 | key = "";
170 | value = "";
171 | }
172 | c++;
173 | continue;
174 | }
175 | }
176 |
177 | if (strlen(key) > (size_t)0)
178 | {
179 | if (parser_callback(key, value))
180 | {
181 | found++;
182 | }
183 | }
184 |
185 | return found;
186 | }
--------------------------------------------------------------------------------
/components/n2klib/include/RingBuffer.h:
--------------------------------------------------------------------------------
1 | /*
2 | RingBuffer.h
3 |
4 | Copyright (c) 2020-2021 Timo Lappalainen
5 |
6 | The MIT License
7 |
8 | Permission is hereby granted, free of charge, to any person obtaining a copy
9 | of this software and associated documentation files (the "Software"), to deal
10 | in the Software without restriction, including without limitation the rights
11 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
12 | copies of the Software, and to permit persons to whom the Software is
13 | furnished to do so, subject to the following conditions:
14 |
15 | The above copyright notice and this permission notice shall be included in
16 | all copies or substantial portions of the Software.
17 |
18 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
19 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
20 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
21 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
22 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
23 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
24 | THE SOFTWARE.
25 |
26 | Simple tRingBuffer and tPriorityRingBuffer template classes.
27 |
28 | With tRingBuffer one can save simple data structures to ring buffer.
29 | Note that you have to take care of data locking from other threads or interrupts for copy time.
30 | E.g.
31 |
32 | struct tCANData {
33 | uint32_t id;
34 | uint8_t len;
35 | uint8_t data[8];
36 | };
37 |
38 | tPriorityRingBuffer CANMessages(100);
39 | ...
40 | void SendMessage() {
41 | tCANData msgOut;
42 | msgOut.id=1;
43 | msgOut.len=1;
44 | msgOut.data[0]=1;
45 | lockData();
46 | CANMessages.add(msgOut);
47 | releaseData();
48 | }
49 |
50 | As an alternative if you want to avoid data copying twice, you can request reference to next
51 | data to be saved and copy data directly to it.
52 |
53 | void SendMessage() {
54 | tCANData *msgOut;
55 | lockData();
56 | if ( (msgOut=CANMessages)!=0 ) {
57 | msgOut->id=1;
58 | msgOut->len=1;
59 | msgOut->data[0]=1;
60 | }
61 | releaseData();
62 | }
63 |
64 | tPriorityRingBuffer is similar as tRingBuffer, but it extends functionality with item priority. When you add
65 | items to buffer, you can give them priority and when you read them, highest priority item will be read out
66 | first.
67 | */
68 |
69 | #ifndef _RING_BUFFER_H_
70 | #define _RING_BUFFER_H_
71 |
72 | #include
73 |
74 | template class tRingBuffer {
75 |
76 | protected:
77 | T *buffer;
78 | uint16_t head;
79 | uint16_t tail;
80 | uint16_t size;
81 |
82 | public:
83 | tRingBuffer(uint16_t _size);
84 | virtual ~tRingBuffer();
85 | uint16_t getSize() const { return size; }
86 | bool isEmpty() const;
87 | void clear();
88 | uint16_t count();
89 | // Get pointer to next add item if available.
90 | T *getAddRef();
91 | bool add(const T &val);
92 | // Get pointer to next read item if available.
93 | const T *getReadRef();
94 | bool read(T &val);
95 | };
96 |
97 | template class tPriorityRingBuffer {
98 | protected:
99 | #define INVALID_RING_REF (uint16_t)(-1)
100 | #define INVALID_PRIORITY_REF (uint8_t)(-1)
101 |
102 | struct tValueSlot {
103 | T Value;
104 | uint16_t next;
105 | uint8_t priority;
106 | };
107 |
108 | struct tPriorityRef {
109 | uint16_t next;
110 | uint16_t last;
111 | tPriorityRef() : next(INVALID_RING_REF), last(INVALID_RING_REF) {;}
112 | void clear() { next=INVALID_RING_REF; last=INVALID_RING_REF; }
113 | };
114 | protected:
115 | uint16_t head;
116 | uint16_t tail;
117 | uint16_t size;
118 | uint8_t maxPriorities;
119 | tValueSlot *buffer;
120 | tPriorityRef *priorityReferencies;
121 |
122 | public:
123 | tPriorityRingBuffer(uint16_t _size, uint8_t _maxPriorities=1);
124 | virtual ~tPriorityRingBuffer();
125 | uint16_t getSize() const { return size; }
126 | bool isEmpty(uint8_t _priority=0xff) const;
127 | void clear();
128 | void clean();
129 | uint16_t count();
130 |
131 | bool add(const T &val, uint8_t _priority=0);
132 | bool read(T &val);
133 |
134 | T *getAddRef(uint8_t _priority=0);
135 | const T *getReadRef(uint8_t _priority);
136 | // Get reference to highest available.
137 | const T *getReadRef(uint8_t *_priority=0);
138 | };
139 |
140 |
141 | #include "RingBuffer.tpp"
142 |
143 | #endif
144 |
--------------------------------------------------------------------------------
/main/WMM_COF.c:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | /***************
28 | *** INCLUDES ***
29 | ***************/
30 |
31 | #include
32 |
33 | /**************
34 | *** DEFINES ***
35 | **************/
36 |
37 | /************
38 | *** TYPES ***
39 | ************/
40 |
41 | /********************************
42 | *** LOCAL FUNCTION PROTOTYPES ***
43 | ********************************/
44 |
45 | /**********************
46 | *** LOCAL VARIABLES ***
47 | **********************/
48 |
49 | /***********************
50 | *** GLOBAL VARIABLES ***
51 | ***********************/
52 |
53 | /****************
54 | *** CONSTANTS ***
55 | ****************/
56 |
57 | /**
58 | * Variable length integer encoded WMM coefficients table
59 | */
60 | const uint8_t wmm_cof_entries_encoded[] =
61 | {0xDD, 0xF2, 0x23, 0x00, 0x83, 0x01, 0x00, 0xEB, 0xE2, 0x01, 0x81, 0xD7, 0x05, 0x8D, 0x01, 0xFB, 0x03, 0xE8, 0x86, 0x03, 0x00, 0xF3, 0x01, 0x00, 0xBC, 0xD1, 0x03, 0xDC, 0xD3, 0x03, 0xC7, 0x01, 0xEE, 0x04, 0x80, 0x86, 0x02, 0xF4, 0x72, 0x56, 0xEF, 0x03, 0x87, 0xD5, 0x01, 0x00, 0x1C, 0x00, 0xC2, 0xF4, 0x02, 0xF6, 0x0C, 0x7E, 0x39, 0x8A, 0xC1, 0x01, 0xB2, 0x25, 0x22, 0x4A, 0x89, 0x52, 0xF5, 0x54, 0xFA, 0x01, 0x0B, 0x87, 0x8D, 0x01, 0x00, 0x4B, 0x00, 0x9E, 0x7E, 0x84, 0x2C, 0x50, 0x02, 0x9E, 0x0D, 0xF0, 0x18, 0x7C, 0x85, 0x01, 0xD6, 0x30, 0x8E, 0x1F, 0x36, 0x25, 0x9F, 0x07, 0xED, 0x36, 0x77, 0x78, 0xE8, 0x24, 0x00, 0x43, 0x00, 0xAF, 0x38, 0x9D, 0x07, 0x06, 0x01, 0x96, 0x1D, 0xA4, 0x20, 0x47, 0x19, 0xFF, 0x15, 0xFD, 0x12, 0x01, 0x49, 0xE8, 0x17, 0x82, 0x05, 0x0C, 0x1E, 0x89, 0x02, 0x9F, 0x0F, 0x0A, 0x05, 0x93, 0x0A, 0x00, 0x46, 0x00, 0x90, 0x0A, 0xFF, 0x02, 0x44, 0x01, 0x9A, 0x0B, 0xBA, 0x03, 0x05, 0x52, 0xFF, 0x12, 0x8F, 0x08, 0x0E, 0x4E, 0xEA, 0x05, 0xC4, 0x0A, 0x4E, 0x09, 0x87, 0x02, 0x9A, 0x01, 0x00, 0x01, 0xC7, 0x0A, 0xA9, 0x0A, 0x08, 0x0A, 0xA6, 0x0C, 0x00, 0x41, 0x00, 0xC0, 0x0C, 0xC2, 0x08, 0x43, 0x05, 0xD3, 0x01, 0xE8, 0x02, 0x41, 0x06, 0xB5, 0x08, 0x17, 0x07, 0x47, 0x9E, 0x02, 0xAB, 0x03, 0x02, 0x42, 0x80, 0x01, 0x56, 0x45, 0x4C, 0xC8, 0x01, 0xD0, 0x04, 0x48, 0x02, 0xA2, 0x01, 0x53, 0x0A, 0x03, 0xAC, 0x03, 0x00, 0x41, 0x00, 0xA2, 0x01, 0x94, 0x01, 0x01, 0x43, 0xEF, 0x02, 0xD9, 0x02, 0x41, 0x07, 0x44, 0x80, 0x02, 0x05, 0x42, 0xD3, 0x03, 0xF6, 0x01, 0x41, 0x05, 0x99, 0x02, 0x95, 0x02, 0x04, 0x43, 0x89, 0x02, 0x24, 0x05, 0x45, 0xE5, 0x02, 0xC5, 0x01, 0x00, 0x04, 0x43, 0x1C, 0x04, 0x01, 0x32, 0x00, 0x41, 0x00, 0x92, 0x01, 0xE9, 0x03, 0x42, 0x43, 0x1D, 0xAF, 0x01, 0x00, 0x02, 0x4E, 0xA2, 0x01, 0x04, 0x44, 0x4B, 0x73, 0x43, 0x04, 0xC5, 0x02, 0x7E, 0x00, 0x01, 0x0B, 0x8E, 0x01, 0x03, 0x00, 0x99, 0x01, 0x04, 0x00, 0x42, 0xDD, 0x01, 0x4F, 0x00, 0x05, 0xF7, 0x01, 0xA1, 0x01, 0x44, 0x02, 0x53, 0x00, 0x00, 0x00, 0x7E, 0x22, 0x00, 0x00, 0x41, 0x42, 0x00, 0x01, 0x11, 0x23, 0x02, 0x43, 0x49, 0x30, 0x41, 0x01, 0x06, 0xD6, 0x01, 0x42, 0x42, 0x49, 0x41, 0x00, 0x01, 0x13, 0x6A, 0x41, 0x00, 0x0E, 0x62, 0x42, 0x41, 0x58, 0x41, 0x41, 0x02, 0x67, 0xD8, 0x01, 0x00, 0x00, 0x1E, 0x00, 0x00, 0x00, 0x4E, 0x00, 0x41, 0x00, 0x59, 0x1A, 0x00, 0x01, 0x18, 0x45, 0x00, 0x00, 0x49, 0x44, 0x00, 0x02, 0x03, 0x06, 0x41, 0x00, 0x47, 0x42, 0x00, 0x00, 0x41, 0x51, 0x00, 0x01, 0x0E, 0x50, 0x41, 0x00, 0x46, 0x5E, 0x41, 0x41, 0x02, 0x54, 0x41, 0x00, 0x1F, 0x5A, 0x41, 0x00, 0x54, 0x00, 0x00, 0x00, 0x41, 0x4C, 0x00, 0x00, 0x05, 0x05, 0x00, 0x00, 0x0D, 0x0D, 0x00, 0x41, 0x4C, 0x52, 0x00, 0x01, 0x07, 0x01, 0x00, 0x00, 0x03, 0x07, 0x00, 0x00, 0x05, 0x41, 0x00, 0x00, 0x42, 0x06, 0x00, 0x01, 0x45, 0x02, 0x00, 0x00, 0x01, 0x49, 0x00, 0x00, 0x4B, 0x00, 0x00, 0x00, 0x43, 0x05, 0x41, 0x41};
62 |
63 | /**********************
64 | *** LOCAL FUNCTIONS ***
65 | **********************/
66 |
67 | /***********************
68 | *** GLOBAL FUNCTIONS ***
69 | ***********************/
--------------------------------------------------------------------------------
/app/app/src/main/res/layout/mqtt_settings_dialog.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
26 |
27 |
31 |
32 |
38 |
39 |
49 |
50 |
56 |
57 |
68 |
69 |
75 |
76 |
87 |
88 |
94 |
95 |
99 |
100 |
106 |
107 |
113 |
114 |
115 |
121 |
122 |
127 |
--------------------------------------------------------------------------------
/components/n2klib/N2kMaretron.cpp:
--------------------------------------------------------------------------------
1 | /*
2 | N2kMaretron.cpp
3 |
4 | Copyright (c) 2019-2021 Vassilis Bourdakis,
5 | Timo Lappalainen, Kave Oy, www.kave.fi,
6 |
7 | Authors Vassilis Bourdakis
8 | Timo Lappalainen
9 |
10 | Permission is hereby granted, free of charge, to any person obtaining a copy of
11 | this software and associated documentation files (the "Software"), to deal in
12 | the Software without restriction, including without limitation the rights to use,
13 | copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the
14 | Software, and to permit persons to whom the Software is furnished to do so,
15 | subject to the following conditions:
16 |
17 | The above copyright notice and this permission notice shall be included in all
18 | copies or substantial portions of the Software.
19 |
20 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
21 | INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A
22 | PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
23 | HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF
24 | CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE
25 | OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
26 | */
27 |
28 | #include "N2kTypes.h"
29 | #include "N2kMaretron.h"
30 | #include
31 |
32 | #define MaretronProprietary 0x9889 // Maretron 137 + reserved + industry code=marine
33 |
34 |
35 | //*****************************************************************************
36 | // Temperature High Range [MARETRON TMP100]
37 | // Temperatures should be in Kelvin
38 | void SetN2kMaretronPGN130823(tN2kMsg &N2kMsg, unsigned char SID, unsigned char TempInstance, tN2kTempSource TempSource,
39 | double ActualTemperature, double SetTemperature) {
40 | N2kMsg.SetPGN(130823L);
41 | N2kMsg.Priority=5;
42 | N2kMsg.Add2ByteUInt(MaretronProprietary);
43 | N2kMsg.AddByte(SID);
44 | N2kMsg.AddByte((unsigned char)TempInstance);
45 | N2kMsg.AddByte((unsigned char)TempSource);
46 | N2kMsg.Add2ByteUDouble(ActualTemperature,0.1);
47 | N2kMsg.Add2ByteUDouble(SetTemperature,0.1);
48 | }
49 |
50 | bool ParseN2kMaretronPGN130823(const tN2kMsg &N2kMsg, unsigned char &SID, unsigned char &TempInstance, tN2kTempSource &TempSource,
51 | double &ActualTemperature, double &SetTemperature) {
52 | if (N2kMsg.PGN!=130823L) return false;
53 | int Index=0;
54 | if (N2kMsg.Get2ByteUInt(Index)!=MaretronProprietary ) return false;
55 | SID=N2kMsg.GetByte(Index);
56 | TempInstance=N2kMsg.GetByte(Index);
57 | TempSource=(tN2kTempSource)(N2kMsg.GetByte(Index));
58 | ActualTemperature=N2kMsg.Get2ByteUDouble(0.1,Index);
59 | SetTemperature=N2kMsg.Get2ByteUDouble(0.1,Index);
60 | return true;
61 | }
62 |
63 | //*****************************************************************************
64 | // Fluid Flow Rate [MARETRON FFM100]
65 | // Flow unit is 1 lt/hour
66 | void SetN2kMaretronPGN65286(tN2kMsg &N2kMsg, unsigned char SID, unsigned char FlowRateInstance, tN2kFluidType FluidType,
67 | double FluidFlowRate) {
68 | N2kMsg.SetPGN(65286L);
69 | N2kMsg.Priority=5;
70 | N2kMsg.Add2ByteUInt(MaretronProprietary);
71 | N2kMsg.AddByte(SID);
72 | N2kMsg.AddByte((unsigned char)FlowRateInstance);
73 | N2kMsg.AddByte((unsigned char)FluidType);
74 | N2kMsg.Add3ByteDouble(FluidFlowRate,0.1);
75 | }
76 |
77 | bool ParseN2kMaretronPGN65286(const tN2kMsg &N2kMsg, unsigned char &SID, unsigned char &FlowRateInstance, tN2kFluidType &FluidType,
78 | double &FluidFlowRate) {
79 | if (N2kMsg.PGN!=65286L) return false;
80 | int Index=0;
81 | if (N2kMsg.Get2ByteUInt(Index)!=MaretronProprietary ) return false;
82 | SID=N2kMsg.GetByte(Index);
83 | FlowRateInstance=N2kMsg.GetByte(Index);
84 | FluidType=(tN2kFluidType)(N2kMsg.GetByte(Index));
85 | FluidFlowRate=N2kMsg.Get3ByteDouble(0.1,Index);
86 | return true;
87 | }
88 |
89 | //*****************************************************************************
90 | // Trip Volume [MARETRON FFM100]
91 | // Volume unit is 1 litre
92 | void SetN2kMaretronPGN65287(tN2kMsg &N2kMsg, unsigned char SID, unsigned char VolumeInstance, tN2kFluidType FluidType,
93 | double TripVolume) {
94 | N2kMsg.SetPGN(65287L);
95 | N2kMsg.Priority=5;
96 | N2kMsg.Add2ByteUInt(MaretronProprietary);
97 | N2kMsg.AddByte(SID);
98 | N2kMsg.AddByte((unsigned char)VolumeInstance);
99 | N2kMsg.AddByte((unsigned char)FluidType);
100 | N2kMsg.Add3ByteDouble(TripVolume,1);
101 | }
102 |
103 | bool ParseN2kMaretronPGN65287(const tN2kMsg &N2kMsg, unsigned char &SID, unsigned char &VolumeInstance, tN2kFluidType &FluidType,
104 | double &TripVolume) {
105 | if (N2kMsg.PGN!=65287L) return false;
106 | int Index=0;
107 | if (N2kMsg.Get2ByteUInt(Index)!=MaretronProprietary ) return false;
108 | SID=N2kMsg.GetByte(Index);
109 | VolumeInstance=N2kMsg.GetByte(Index);
110 | FluidType=(tN2kFluidType)(N2kMsg.GetByte(Index));
111 | TripVolume=N2kMsg.Get3ByteDouble(1,Index);
112 | return true;
113 | }
--------------------------------------------------------------------------------
/components/n2klib/Seasmart.cpp:
--------------------------------------------------------------------------------
1 | /*
2 | The MIT License
3 |
4 | Copyright (c) 2017-2021 Thomas Sarlandie thomas@sarlandie.net
5 |
6 | Permission is hereby granted, free of charge, to any person obtaining a copy
7 | of this software and associated documentation files (the "Software"), to deal
8 | in the Software without restriction, including without limitation the rights
9 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
10 | copies of the Software, and to permit persons to whom the Software is
11 | furnished to do so, subject to the following conditions:
12 |
13 | The above copyright notice and this permission notice shall be included in
14 | all copies or substantial portions of the Software.
15 |
16 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
17 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
18 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
19 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
20 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
21 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
22 | THE SOFTWARE.
23 | */
24 |
25 | #include
26 | #include
27 | #include
28 | #include "Seasmart.h"
29 |
30 | /* Some private helper functions to generate hex-serialized NMEA messages */
31 | static const char *hex = "0123456789ABCDEF";
32 |
33 | static int appendByte(char *s, uint8_t byte) {
34 | s[0] = hex[byte >> 4];
35 | s[1] = hex[byte & 0xf];
36 | return 2;
37 | }
38 |
39 | static int append2Bytes(char *s, uint16_t i) {
40 | appendByte(s, i >> 8);
41 | appendByte(s + 2, i & 0xff);
42 | return 4;
43 | }
44 |
45 | static int appendWord(char *s, uint32_t i) {
46 | append2Bytes(s, i >> 16);
47 | append2Bytes(s + 4, i & 0xffff);
48 | return 8;
49 | }
50 |
51 | static uint8_t nmea_compute_checksum(const char *sentence) {
52 | if (sentence == 0) {
53 | return 0;
54 | }
55 |
56 | // Skip the $ at the beginning
57 | int i = 1;
58 |
59 | int checksum = 0;
60 | while (sentence[i] != '*') {
61 | checksum ^= sentence[i];
62 | i++;
63 | }
64 | return checksum;
65 | }
66 |
67 | size_t N2kToSeasmart(const tN2kMsg &msg, uint32_t timestamp, char *buffer, size_t size) {
68 | size_t pcdin_sentence_length = 6+1+6+1+8+1+2+1+msg.DataLen*2+1+2 + 1;
69 |
70 | if (size < pcdin_sentence_length) {
71 | return 0;
72 | }
73 |
74 | char *s = buffer;
75 |
76 | strcpy(s, "$PCDIN,");
77 | s += 7;
78 | s += appendByte(s, msg.PGN >> 16);
79 | s += append2Bytes(s, msg.PGN & 0xffff);
80 | *s++ = ',';
81 | s += appendWord(s, timestamp);
82 | *s++ = ',';
83 | s += appendByte(s, msg.Source);
84 | *s++ = ',';
85 |
86 | for (int i = 0; i < msg.DataLen; i++) {
87 | s += appendByte(s, msg.Data[i]);
88 | }
89 |
90 | *s++ = '*';
91 | s += appendByte(s, nmea_compute_checksum(buffer));
92 | *s = 0;
93 |
94 | return (size_t)(s - buffer);
95 | }
96 |
97 | /*
98 | * Attemts to read n bytes in hexadecimal from input string to value.
99 | *
100 | * Returns true if successful, false otherwise.
101 | */
102 | static bool readNHexByte(const char *s, unsigned int n, uint32_t &value) {
103 | if (strlen(s) < 2*n) {
104 | return -1;
105 | }
106 | for (unsigned int i = 0; i < 2*n; i++) {
107 | if (!isxdigit(s[i])) {
108 | return -1;
109 | }
110 | }
111 |
112 | char sNumber[2*n + 1];
113 | strncpy(sNumber, s, sizeof(sNumber));
114 | sNumber[sizeof(sNumber) - 1] = 0;
115 |
116 | value = strtol(sNumber, 0, 16);
117 | return true;
118 | }
119 |
120 | bool SeasmartToN2k(const char *buffer, uint32_t ×tamp, tN2kMsg &msg) {
121 | msg.Clear();
122 |
123 | const char *s = buffer;
124 | if (strncmp("$PCDIN,", s, 6) != 0) {
125 | return false;
126 | }
127 | s += 7;
128 |
129 | uint32_t pgnHigh;
130 | uint32_t pgnLow;
131 | if (!readNHexByte(s, 1, pgnHigh)) {
132 | return false;
133 | }
134 | s += 2;
135 | if (!readNHexByte(s, 2, pgnLow)) {
136 | return false;
137 | }
138 | s += 5;
139 | msg.PGN = (pgnHigh << 16) + pgnLow;
140 |
141 | if (!readNHexByte(s, 4, timestamp)) {
142 | return false;
143 | }
144 | s += 9;
145 |
146 | uint32_t source;
147 | if (!readNHexByte(s, 1, source)) {
148 | return false;
149 | }
150 | msg.Source = source;
151 | s += 3;
152 |
153 | int dataLen = 0;
154 | while (s[dataLen] != 0 && s[dataLen] != '*') {
155 | dataLen++;
156 | }
157 | if (dataLen % 2 != 0) {
158 | return false;
159 | }
160 | dataLen /= 2;
161 |
162 | msg.DataLen = dataLen;
163 | if (msg.DataLen > msg.MaxDataLen) {
164 | return false;
165 | }
166 | for (int i = 0; i < dataLen; i++) {
167 | uint32_t byte;
168 | if (!readNHexByte(s, 1, byte)) {
169 | return false;
170 | }
171 | msg.Data[i] = byte;
172 | s += 2;
173 | }
174 |
175 | // Skip the terminating '*' which marks beginning of checksum
176 | s += 1;
177 | uint32_t checksum;
178 | if (!readNHexByte(s, 1, checksum)) {
179 | return false;
180 | }
181 |
182 | if (checksum != nmea_compute_checksum(buffer)) {
183 | return false;
184 | }
185 |
186 | return true;
187 | }
188 |
--------------------------------------------------------------------------------
/components/n2klib/include/N2kMessagesEnumToStr.h:
--------------------------------------------------------------------------------
1 | /*
2 | N2kMessagesEnumToStr.h
3 |
4 | Copyright (c) 2015-2021 Timo Lappalainen, Kave Oy, www.kave.fi
5 |
6 | Permission is hereby granted, free of charge, to any person obtaining a copy of
7 | this software and associated documentation files (the "Software"), to deal in
8 | the Software without restriction, including without limitation the rights to use,
9 | copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the
10 | Software, and to permit persons to whom the Software is furnished to do so,
11 | subject to the following conditions:
12 |
13 | The above copyright notice and this permission notice shall be included in all
14 | copies or substantial portions of the Software.
15 |
16 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
17 | INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A
18 | PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
19 | HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF
20 | CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE
21 | OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
22 |
23 | This is collection of functions for handling NMEA2000 bus messages.
24 | Library contains functions to convert enums in N2kMessages.h to
25 | const char *
26 |
27 | If you do not need enums in clear text, you do not need this library.
28 | */
29 |
30 | #ifndef _N2kMessagesEnumToStr_H_
31 | #define _N2kMessagesEnumToStr_H_
32 |
33 | #include "N2kMessages.h"
34 |
35 | const char *N2kEnumTypeEmpty="";
36 |
37 | template void PrintN2kEnumType(T a, Stream *OutputStream, bool addLF=true) {
38 | const char *str=N2kEnumTypeToStr(a);
39 | if (str[0] != '\0') {
40 | if (addLF) { OutputStream->println(str); } else { OutputStream->print(str); }
41 | } else {
42 | OutputStream->print(F("unknown (")); OutputStream->print(a); OutputStream->println(F(")"));
43 | }
44 | }
45 |
46 | #define MakeN2kEnumTypeToStrFunc(enumType,strs) \
47 | const char * N2kEnumTypeToStr(enumType enumVal) { \
48 | if ( enumVal<(sizeof(strs)/sizeof(const char *)) ) { \
49 | return strs[enumVal]; \
50 | } else { return N2kEnumTypeEmpty; }\
51 | }
52 |
53 | //*****************************************************************************
54 | const char* tN2kHeadingReferenceStrs[] = { "true", "magnetic" };
55 | MakeN2kEnumTypeToStrFunc(tN2kHeadingReference,tN2kHeadingReferenceStrs)
56 |
57 | const char* tN2kTimeSourceStrs[] = { "GPS", "GLONASS", "radio station", "local cesium clock", "local rubidium clock", "local crystal clock" };
58 | MakeN2kEnumTypeToStrFunc(tN2kTimeSource,tN2kTimeSourceStrs)
59 |
60 | const char* tN2kGNSStypeStrs[] = { "GPS", "GLONASS", "GPS+GLONASS", "GPS+SBAS/WAAS", "GPS+SBAS/WAAS+GLONASS", "Chayka", "integrated", "surveyed", "Galileo" };
61 | MakeN2kEnumTypeToStrFunc(tN2kGNSStype,tN2kGNSStypeStrs)
62 |
63 | const char* tN2kGNSSmethodStrs[] = { "no GNSS", "GNSS fix", "DGNSS", "precise GNSS" };
64 | MakeN2kEnumTypeToStrFunc(tN2kGNSSmethod,tN2kGNSSmethodStrs)
65 |
66 | const char* tN2kTempSourceStrs[] = { "sea", "outside", "inside", "engine room", "main cabin", "live well", "bait well", "refridgeration",
67 | "heating system", "dew point", "apparent wind chill", "theoretical wind chill", "heat index", "freezer", "exhaust gas"};
68 | MakeN2kEnumTypeToStrFunc(tN2kTempSource,tN2kTempSourceStrs)
69 |
70 | const char* tN2kBatTypeStrs[] = { "flooded", "gel", "AGM"};
71 | MakeN2kEnumTypeToStrFunc(tN2kBatType,tN2kBatTypeStrs)
72 |
73 | const char* tN2kBatEqSupportStrs[] = { "no", "yes", "error"};
74 | MakeN2kEnumTypeToStrFunc(tN2kBatEqSupport,tN2kBatEqSupportStrs)
75 |
76 | const char* tN2kBatNomVoltStrs[] = { "6V", "12V", "24V", "32V", "62V", "42V", "48V"};
77 | MakeN2kEnumTypeToStrFunc(tN2kBatNomVolt,tN2kBatNomVoltStrs)
78 |
79 | const char* tN2kBatChemStrs[] = { "lead acid", "LiIon", "NiCad", "NiMh"};
80 | MakeN2kEnumTypeToStrFunc(tN2kBatChem,tN2kBatChemStrs)
81 |
82 | const char* tN2kDCTypeStrs[] = { "battery", "altenator", "converter", "solar cell", "wind generator"};
83 | MakeN2kEnumTypeToStrFunc(tN2kDCType,tN2kDCTypeStrs)
84 |
85 | const char* tN2kTransmissionGearStrs[] = { "forward", "neutral", "reverse", "unknown"};
86 | MakeN2kEnumTypeToStrFunc(tN2kTransmissionGear,tN2kTransmissionGearStrs)
87 |
88 | const char* tN2kOnOffStrs[] = { "0", "1", "err", "NA" };
89 | MakeN2kEnumTypeToStrFunc(tN2kOnOff,tN2kOnOffStrs)
90 |
91 | const char* tN2kPressureStrs[] = { "atmospheric", "water", "steam", "compressed air", "hydraulic", "filter", "altimete setting", "oil", "fuel" };
92 | MakeN2kEnumTypeToStrFunc(tN2kPressureSource,tN2kPressureStrs)
93 |
94 | const char* tN2kHumidityStrs[] = { "inside", "outside" };
95 | MakeN2kEnumTypeToStrFunc(tN2kHumiditySource,tN2kHumidityStrs)
96 |
97 | const char* tN2kRudderDirectionOrderStrs[] = { "no direction order", "move to starboard", "move to port" };
98 | MakeN2kEnumTypeToStrFunc(tN2kRudderDirectionOrder,tN2kRudderDirectionOrderStrs)
99 |
100 | const char* tN2kSpeedWaterReferenceTypeStrs[] = {"Paddle wheel","Pitot tube","Doppler","Correlation (ultra sound)","Electro Magnetic"};
101 | MakeN2kEnumTypeToStrFunc(tN2kSpeedWaterReferenceType,tN2kSpeedWaterReferenceTypeStrs);
102 |
103 | const char* tN2kMagneticVariationStrs[] = { "Manual","Automatic Chart","Automatic Table","Automatic Calculation","WMM 2000","WMM 2005","WMM 2010","WMM 2015","WMM 2020" };
104 | MakeN2kEnumTypeToStrFunc(tN2kMagneticVariation, tN2kSpeedWaterReferenceTypeStrs);
105 |
106 | #endif
107 |
--------------------------------------------------------------------------------
/components/n2klib/include/N2kGroupFunctionDefaultHandlers.h:
--------------------------------------------------------------------------------
1 | /*
2 | N2kGroupFunctionDefaultHandlers.h
3 |
4 | Copyright (c) 2015-2021 Timo Lappalainen, Kave Oy, www.kave.fi
5 |
6 | Permission is hereby granted, free of charge, to any person obtaining a copy of
7 | this software and associated documentation files (the "Software"), to deal in
8 | the Software without restriction, including without limitation the rights to use,
9 | copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the
10 | Software, and to permit persons to whom the Software is furnished to do so,
11 | subject to the following conditions:
12 |
13 | The above copyright notice and this permission notice shall be included in all
14 | copies or substantial portions of the Software.
15 |
16 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
17 | INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A
18 | PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
19 | HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF
20 | CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE
21 | OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
22 |
23 | */
24 |
25 | /*
26 | The file contains default group function handler classes for PGN 60928, 126993.
27 | These handlers are mandatory for NMEA 2000 certified devices.
28 | */
29 |
30 | #ifndef _N2kGroupFunctionDefaultHandlers_H_
31 | #define _N2kGroupFunctionDefaultHandlers_H_
32 |
33 | #include "NMEA2000_CompilerDefns.h"
34 | #include "N2kGroupFunction.h"
35 |
36 | #if !defined(N2K_NO_GROUP_FUNCTION_SUPPORT)
37 |
38 | //*****************************************************************************
39 | // See document http://www.nmea.org/Assets/20140710%20nmea-2000-060928%20iso%20address%20claim%20pgn%20corrigendum.pdf
40 | // For requirements for handling Group function request for PGN 60928
41 | class tN2kGroupFunctionHandlerForPGN60928 : public tN2kGroupFunctionHandler {
42 | protected:
43 | virtual bool HandleRequest(const tN2kMsg &N2kMsg,
44 | uint32_t TransmissionInterval,
45 | uint16_t TransmissionIntervalOffset,
46 | uint8_t NumberOfParameterPairs,
47 | int iDev);
48 | virtual bool HandleCommand(const tN2kMsg &N2kMsg, uint8_t PrioritySetting, uint8_t NumberOfParameterPairs, int iDev);
49 | public:
50 | tN2kGroupFunctionHandlerForPGN60928(tNMEA2000 *_pNMEA2000) : tN2kGroupFunctionHandler(_pNMEA2000,60928L) {}
51 | };
52 |
53 | //*****************************************************************************
54 | // This is mandatory.
55 | class tN2kGroupFunctionHandlerForPGN126464 : public tN2kGroupFunctionHandler {
56 | protected:
57 | virtual bool HandleRequest(const tN2kMsg &N2kMsg,
58 | uint32_t TransmissionInterval,
59 | uint16_t TransmissionIntervalOffset,
60 | uint8_t NumberOfParameterPairs,
61 | int iDev);
62 | public:
63 | tN2kGroupFunctionHandlerForPGN126464(tNMEA2000 *_pNMEA2000) : tN2kGroupFunctionHandler(_pNMEA2000,126464L) {}
64 | };
65 |
66 | #if !defined(N2K_NO_HEARTBEAT_SUPPORT)
67 | //*****************************************************************************
68 | // See document https://www.nmea.org/Assets/20140102%20nmea-2000-126993%20heartbeat%20pgn%20corrigendum.pdf for
69 | // Heartbeat settings
70 | class tN2kGroupFunctionHandlerForPGN126993 : public tN2kGroupFunctionHandler {
71 | protected:
72 | virtual bool HandleRequest(const tN2kMsg &N2kMsg,
73 | uint32_t TransmissionInterval,
74 | uint16_t TransmissionIntervalOffset,
75 | uint8_t NumberOfParameterPairs,
76 | int iDev);
77 | public:
78 | tN2kGroupFunctionHandlerForPGN126993(tNMEA2000 *_pNMEA2000) : tN2kGroupFunctionHandler(_pNMEA2000,126993L) {}
79 | };
80 | #endif
81 |
82 | //*****************************************************************************
83 | // This is not mandatory, but prefered
84 | class tN2kGroupFunctionHandlerForPGN126996 : public tN2kGroupFunctionHandler {
85 | protected:
86 | virtual bool HandleRequest(const tN2kMsg &N2kMsg,
87 | uint32_t TransmissionInterval,
88 | uint16_t TransmissionIntervalOffset,
89 | uint8_t NumberOfParameterPairs,
90 | int iDev);
91 | public:
92 | tN2kGroupFunctionHandlerForPGN126996(tNMEA2000 *_pNMEA2000) : tN2kGroupFunctionHandler(_pNMEA2000,126996L) {}
93 | };
94 |
95 | //*****************************************************************************
96 | // This is not mandatory, but prefered
97 | class tN2kGroupFunctionHandlerForPGN126998 : public tN2kGroupFunctionHandler {
98 | protected:
99 | virtual bool HandleRequest(const tN2kMsg &N2kMsg,
100 | uint32_t TransmissionInterval,
101 | uint16_t TransmissionIntervalOffset,
102 | uint8_t NumberOfParameterPairs,
103 | int iDev);
104 | virtual bool HandleCommand(const tN2kMsg &N2kMsg, uint8_t PrioritySetting, uint8_t NumberOfParameterPairs, int iDev);
105 | public:
106 | tN2kGroupFunctionHandlerForPGN126998(tNMEA2000 *_pNMEA2000) : tN2kGroupFunctionHandler(_pNMEA2000,126998L) {}
107 | };
108 |
109 | #endif
110 | #endif
111 |
--------------------------------------------------------------------------------
/main/temperature_sensor.c:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | /***************
28 | *** INCLUDES ***
29 | ***************/
30 |
31 | #include
32 | #include
33 | #include "driver/i2c.h"
34 | #include "driver/adc.h"
35 | #include "esp_adc_cal.h"
36 | #include "temperature_sensor.h"
37 | #include "esp_log.h"
38 |
39 | /**************
40 | *** DEFINES ***
41 | **************/
42 |
43 | #define VOLTAGE_DIVIDER_RESISTANCE 9310.0f
44 | #define NO_OF_SAMPLES 32
45 | #define VOLTAGE_REF 5.0f
46 |
47 | /************
48 | *** TYPES ***
49 | ************/
50 |
51 | /********************************
52 | *** LOCAL FUNCTION PROTOTYPES ***
53 | ********************************/
54 |
55 | /**
56 | * Convert a sensor resistance to a sensor temperature for a PT-1000 sensor
57 | *
58 | * @param r resistance in ohms
59 | * @return temperature in degrees C
60 | */
61 | static float temperature_sensor_temp_from_resistance(float r);
62 |
63 | /**********************
64 | *** LOCAL VARIABLES ***
65 | **********************/
66 |
67 | static esp_adc_cal_characteristics_t adc_chars;
68 | static float temperatures[5];
69 | static uint8_t next_temperature_position;
70 |
71 | /***********************
72 | *** GLOBAL VARIABLES ***
73 | ***********************/
74 |
75 | /****************
76 | *** CONSTANTS ***
77 | ****************/
78 |
79 | /**********************
80 | *** LOCAL FUNCTIONS ***
81 | **********************/
82 |
83 | static float temperature_sensor_temp_from_resistance(float r)
84 | {
85 | float t;
86 | const float A = 3.90802e-3f;
87 | const float B = -5.80195e-7f;
88 | const float R0 = 1000.0f;
89 |
90 | t = A * A - 4.00f * B * (1.0f - r / R0);
91 |
92 | if (t < 0.0f)
93 | {
94 | // trap sqrt error
95 | return -9999.99f;
96 | }
97 |
98 | t = (-A + sqrt(t)) / (2.0f * B);
99 |
100 | return t;
101 | }
102 |
103 | /***********************
104 | *** GLOBAL FUNCTIONS ***
105 | ***********************/
106 |
107 | void temperature_sensor_init(void)
108 | {
109 | if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_VREF) == ESP_OK)
110 | {
111 | ESP_LOGI(pcTaskGetName(NULL), "eFuse Vref: Supported");
112 | }
113 | else
114 | {
115 | ESP_LOGI(pcTaskGetName(NULL), "eFuse Vref: NOT supported");
116 | }
117 |
118 | adc1_config_width(ADC_WIDTH_BIT_12);
119 | adc1_config_channel_atten(ADC1_CHANNEL_4, ADC_ATTEN_DB_0);
120 | esp_adc_cal_value_t val_type = esp_adc_cal_characterize(ADC_UNIT_1, ADC_ATTEN_DB_0, ADC_WIDTH_BIT_12, 0, &adc_chars);
121 |
122 | if (val_type == ESP_ADC_CAL_VAL_EFUSE_TP)
123 | {
124 | ESP_LOGI(pcTaskGetName(NULL), "Characterized using Two Point Value");
125 | }
126 | else if (val_type == ESP_ADC_CAL_VAL_EFUSE_VREF)
127 | {
128 | ESP_LOGI(pcTaskGetName(NULL), "Characterized using eFuse Vref");
129 | }
130 | else
131 | {
132 | ESP_LOGI(pcTaskGetName(NULL), "Characterized using Default Vref");
133 | }
134 | }
135 |
136 | float temperature_sensor_read(void)
137 | {
138 | uint32_t adc_readings[NO_OF_SAMPLES];
139 | bool sorted;
140 | uint32_t swap_value;
141 | uint32_t adc_reading;
142 |
143 | for (int i = 0; i < NO_OF_SAMPLES; i++)
144 | {
145 | adc_readings[i] = adc1_get_raw(ADC1_CHANNEL_4);
146 | }
147 |
148 | do
149 | {
150 | sorted = true;
151 | for (int i = 0U; i < (NO_OF_SAMPLES - 1U); i++)
152 | {
153 | if (adc_readings[i] > adc_readings[i + 1U])
154 | {
155 | swap_value = adc_readings[i + 1U];
156 | adc_readings[i + 1U] = adc_readings[i];
157 | adc_readings[i] = swap_value;
158 | sorted = false;
159 | }
160 | }
161 | }
162 | while (!sorted);
163 | adc_reading = (adc_readings[NO_OF_SAMPLES / 2] + adc_readings[NO_OF_SAMPLES / 2 - 1]) / 2;
164 |
165 | // convert adc_reading to voltage in mV
166 | uint32_t voltage = esp_adc_cal_raw_to_voltage(adc_reading, &adc_chars);
167 |
168 | float voltagef = ((float)voltage) / 1000.0f;
169 | voltagef -= 0.08f; // incorrect ADC reading frig
170 | ESP_LOGI(pcTaskGetName(NULL), "Exhaust PT1000 temperature sensor voltage = %f", voltagef);
171 |
172 | float resistance = (VOLTAGE_DIVIDER_RESISTANCE * voltagef) / (VOLTAGE_REF - voltagef);
173 | ESP_LOGI(pcTaskGetName(NULL), "Exhaust PT1000 temperature sensor resistance = %f", resistance);
174 |
175 | temperatures[next_temperature_position] = temperature_sensor_temp_from_resistance(resistance);
176 | ESP_LOGI(pcTaskGetName(NULL), "Exhaust temperature = %f", temperatures[next_temperature_position]);
177 |
178 | next_temperature_position++;
179 | if (next_temperature_position == sizeof(temperatures) / sizeof(float))
180 | {
181 | next_temperature_position = 0U;
182 | }
183 |
184 | float mean_temperature = 0.0f;
185 | for (uint8_t i = 0U; i < sizeof(temperatures) / sizeof(float); i++)
186 | {
187 | mean_temperature += temperatures[i];
188 | }
189 |
190 | return mean_temperature / (float)(sizeof(temperatures) / sizeof(float));
191 | }
192 |
--------------------------------------------------------------------------------
/app/gradlew:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env sh
2 |
3 | #
4 | # Copyright 2015 the original author or authors.
5 | #
6 | # Licensed under the Apache License, Version 2.0 (the "License");
7 | # you may not use this file except in compliance with the License.
8 | # You may obtain a copy of the License at
9 | #
10 | # https://www.apache.org/licenses/LICENSE-2.0
11 | #
12 | # Unless required by applicable law or agreed to in writing, software
13 | # distributed under the License is distributed on an "AS IS" BASIS,
14 | # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
15 | # See the License for the specific language governing permissions and
16 | # limitations under the License.
17 | #
18 |
19 | ##############################################################################
20 | ##
21 | ## Gradle start up script for UN*X
22 | ##
23 | ##############################################################################
24 |
25 | # Attempt to set APP_HOME
26 | # Resolve links: $0 may be a link
27 | PRG="$0"
28 | # Need this for relative symlinks.
29 | while [ -h "$PRG" ] ; do
30 | ls=`ls -ld "$PRG"`
31 | link=`expr "$ls" : '.*-> \(.*\)$'`
32 | if expr "$link" : '/.*' > /dev/null; then
33 | PRG="$link"
34 | else
35 | PRG=`dirname "$PRG"`"/$link"
36 | fi
37 | done
38 | SAVED="`pwd`"
39 | cd "`dirname \"$PRG\"`/" >/dev/null
40 | APP_HOME="`pwd -P`"
41 | cd "$SAVED" >/dev/null
42 |
43 | APP_NAME="Gradle"
44 | APP_BASE_NAME=`basename "$0"`
45 |
46 | # Add default JVM options here. You can also use JAVA_OPTS and GRADLE_OPTS to pass JVM options to this script.
47 | DEFAULT_JVM_OPTS='"-Xmx64m" "-Xms64m"'
48 |
49 | # Use the maximum available, or set MAX_FD != -1 to use that value.
50 | MAX_FD="maximum"
51 |
52 | warn () {
53 | echo "$*"
54 | }
55 |
56 | die () {
57 | echo
58 | echo "$*"
59 | echo
60 | exit 1
61 | }
62 |
63 | # OS specific support (must be 'true' or 'false').
64 | cygwin=false
65 | msys=false
66 | darwin=false
67 | nonstop=false
68 | case "`uname`" in
69 | CYGWIN* )
70 | cygwin=true
71 | ;;
72 | Darwin* )
73 | darwin=true
74 | ;;
75 | MINGW* )
76 | msys=true
77 | ;;
78 | NONSTOP* )
79 | nonstop=true
80 | ;;
81 | esac
82 |
83 | CLASSPATH=$APP_HOME/gradle/wrapper/gradle-wrapper.jar
84 |
85 |
86 | # Determine the Java command to use to start the JVM.
87 | if [ -n "$JAVA_HOME" ] ; then
88 | if [ -x "$JAVA_HOME/jre/sh/java" ] ; then
89 | # IBM's JDK on AIX uses strange locations for the executables
90 | JAVACMD="$JAVA_HOME/jre/sh/java"
91 | else
92 | JAVACMD="$JAVA_HOME/bin/java"
93 | fi
94 | if [ ! -x "$JAVACMD" ] ; then
95 | die "ERROR: JAVA_HOME is set to an invalid directory: $JAVA_HOME
96 |
97 | Please set the JAVA_HOME variable in your environment to match the
98 | location of your Java installation."
99 | fi
100 | else
101 | JAVACMD="java"
102 | which java >/dev/null 2>&1 || die "ERROR: JAVA_HOME is not set and no 'java' command could be found in your PATH.
103 |
104 | Please set the JAVA_HOME variable in your environment to match the
105 | location of your Java installation."
106 | fi
107 |
108 | # Increase the maximum file descriptors if we can.
109 | if [ "$cygwin" = "false" -a "$darwin" = "false" -a "$nonstop" = "false" ] ; then
110 | MAX_FD_LIMIT=`ulimit -H -n`
111 | if [ $? -eq 0 ] ; then
112 | if [ "$MAX_FD" = "maximum" -o "$MAX_FD" = "max" ] ; then
113 | MAX_FD="$MAX_FD_LIMIT"
114 | fi
115 | ulimit -n $MAX_FD
116 | if [ $? -ne 0 ] ; then
117 | warn "Could not set maximum file descriptor limit: $MAX_FD"
118 | fi
119 | else
120 | warn "Could not query maximum file descriptor limit: $MAX_FD_LIMIT"
121 | fi
122 | fi
123 |
124 | # For Darwin, add options to specify how the application appears in the dock
125 | if $darwin; then
126 | GRADLE_OPTS="$GRADLE_OPTS \"-Xdock:name=$APP_NAME\" \"-Xdock:icon=$APP_HOME/media/gradle.icns\""
127 | fi
128 |
129 | # For Cygwin or MSYS, switch paths to Windows format before running java
130 | if [ "$cygwin" = "true" -o "$msys" = "true" ] ; then
131 | APP_HOME=`cygpath --path --mixed "$APP_HOME"`
132 | CLASSPATH=`cygpath --path --mixed "$CLASSPATH"`
133 |
134 | JAVACMD=`cygpath --unix "$JAVACMD"`
135 |
136 | # We build the pattern for arguments to be converted via cygpath
137 | ROOTDIRSRAW=`find -L / -maxdepth 1 -mindepth 1 -type d 2>/dev/null`
138 | SEP=""
139 | for dir in $ROOTDIRSRAW ; do
140 | ROOTDIRS="$ROOTDIRS$SEP$dir"
141 | SEP="|"
142 | done
143 | OURCYGPATTERN="(^($ROOTDIRS))"
144 | # Add a user-defined pattern to the cygpath arguments
145 | if [ "$GRADLE_CYGPATTERN" != "" ] ; then
146 | OURCYGPATTERN="$OURCYGPATTERN|($GRADLE_CYGPATTERN)"
147 | fi
148 | # Now convert the arguments - kludge to limit ourselves to /bin/sh
149 | i=0
150 | for arg in "$@" ; do
151 | CHECK=`echo "$arg"|egrep -c "$OURCYGPATTERN" -`
152 | CHECK2=`echo "$arg"|egrep -c "^-"` ### Determine if an option
153 |
154 | if [ $CHECK -ne 0 ] && [ $CHECK2 -eq 0 ] ; then ### Added a condition
155 | eval `echo args$i`=`cygpath --path --ignore --mixed "$arg"`
156 | else
157 | eval `echo args$i`="\"$arg\""
158 | fi
159 | i=`expr $i + 1`
160 | done
161 | case $i in
162 | 0) set -- ;;
163 | 1) set -- "$args0" ;;
164 | 2) set -- "$args0" "$args1" ;;
165 | 3) set -- "$args0" "$args1" "$args2" ;;
166 | 4) set -- "$args0" "$args1" "$args2" "$args3" ;;
167 | 5) set -- "$args0" "$args1" "$args2" "$args3" "$args4" ;;
168 | 6) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" ;;
169 | 7) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" "$args6" ;;
170 | 8) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" "$args6" "$args7" ;;
171 | 9) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" "$args6" "$args7" "$args8" ;;
172 | esac
173 | fi
174 |
175 | # Escape application args
176 | save () {
177 | for i do printf %s\\n "$i" | sed "s/'/'\\\\''/g;1s/^/'/;\$s/\$/' \\\\/" ; done
178 | echo " "
179 | }
180 | APP_ARGS=`save "$@"`
181 |
182 | # Collect all arguments for the java command, following the shell quoting and substitution rules
183 | eval set -- $DEFAULT_JVM_OPTS $JAVA_OPTS $GRADLE_OPTS "\"-Dorg.gradle.appname=$APP_BASE_NAME\"" -classpath "\"$CLASSPATH\"" org.gradle.wrapper.GradleWrapperMain "$APP_ARGS"
184 |
185 | exec "$JAVACMD" "$@"
186 |
--------------------------------------------------------------------------------
/main/util.c:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | /***************
28 | *** INCLUDES ***
29 | ***************/
30 |
31 | #include
32 | #include
33 | #include
34 | #include "util.h"
35 |
36 | /**************
37 | *** DEFINES ***
38 | **************/
39 |
40 | /************
41 | *** TYPES ***
42 | ************/
43 |
44 | /********************************
45 | *** LOCAL FUNCTION PROTOTYPES ***
46 | ********************************/
47 |
48 | /**********************
49 | *** LOCAL VARIABLES ***
50 | **********************/
51 |
52 | /***********************
53 | *** GLOBAL VARIABLES ***
54 | ***********************/
55 |
56 | /****************
57 | *** CONSTANTS ***
58 | ****************/
59 |
60 | /**********************
61 | *** LOCAL FUNCTIONS ***
62 | **********************/
63 |
64 | /***********************
65 | *** GLOBAL FUNCTIONS ***
66 | ***********************/
67 |
68 | void trim_trailing_ws(char *str)
69 | {
70 | int32_t index;
71 | int32_t i;
72 |
73 | // set default index
74 | index = -1;
75 |
76 | // find last index of non-white space character
77 | i = 0;
78 | while (str[i] != '\0')
79 | {
80 | if (str[i] != ' ' && str[i] != '\t' && str[i] != '\n' && str[i] != '\r')
81 | {
82 | index = i;
83 | }
84 |
85 | i++;
86 | }
87 |
88 | // mark next character to last non-white space character as NULL
89 | str[index + 1] = '\0';
90 | }
91 |
92 | bool util_safe_strcpy(char *dest, size_t size, const char *src)
93 | {
94 | if (dest == NULL || src == NULL || strlen(src) + (size_t)1 > size)
95 | {
96 | return false;
97 | }
98 |
99 | (void)strcpy(dest, src);
100 |
101 | return true;
102 | }
103 |
104 | bool util_safe_strcat(char *dest, size_t size, const char *src)
105 | {
106 | if (dest == NULL || src == NULL || (strlen(dest) + strlen(src) + (size_t)1 > size))
107 | {
108 | return false;
109 | }
110 |
111 | (void)strcat(dest, src);
112 |
113 | return true;
114 | }
115 |
116 | uint32_t util_htoi(const char *s)
117 | {
118 | uint32_t val = 0UL;
119 | uint8_t x = 0U;
120 |
121 | if (s == NULL)
122 | {
123 | return 0UL;
124 | }
125 |
126 | while (s[x] != '\0')
127 | {
128 | if (s[x] >= '0' && s[x] <= '9')
129 | {
130 | val = val * 16UL + (uint32_t)(s[x] - '0');
131 | }
132 | else if (s[x] >= 'A' && s[x] <= 'F')
133 | {
134 | val = val * 16UL + (uint32_t)(s[x] - 'A') + 10UL;
135 | }
136 | else if (s[x] >= 'a' && s[x] <= 'f')
137 | {
138 | val = val * 16UL + (uint32_t)(s[x] - 'a') + 10UL;
139 | }
140 | else
141 | {
142 | return 0UL;
143 | }
144 |
145 | x++;
146 | }
147 |
148 | return val;
149 | }
150 |
151 | void util_replace_char(char *s, char orig, char rep)
152 | {
153 | char *ix = s;
154 |
155 | if (s == NULL)
156 | {
157 | return;
158 | }
159 |
160 | while((ix = strchr(ix, orig)))
161 | {
162 | *ix++ = rep;
163 | }
164 | }
165 |
166 | char *util_capitalize_string(char *s)
167 | {
168 | char *o = s;
169 |
170 | if (s == NULL)
171 | {
172 | return NULL;
173 | }
174 |
175 | while ((*s = toupper(*s)))
176 | {
177 | s++;
178 | }
179 |
180 | return o;
181 | }
182 |
183 | char *util_seconds_to_hms(uint32_t seconds)
184 | {
185 | static char result[15];
186 | char f[10];
187 | uint32_t h = seconds / 3600UL;
188 | uint32_t m = (seconds - (seconds / 3600UL) * 3600UL ) / 60UL;
189 | uint32_t s = seconds % 60UL;
190 |
191 | result[0] = '\0';
192 | if (h > 0)
193 | {
194 | (void)snprintf(f, sizeof(f), "%uh", (unsigned int)h);
195 | (void)util_safe_strcat(result, sizeof(result), f);
196 | }
197 |
198 | if (m > 0UL)
199 | {
200 | (void)snprintf(f, sizeof(f), "%um", (unsigned int)m);
201 | (void)util_safe_strcat(result, sizeof(result), f);
202 | }
203 |
204 | if (s > 0UL)
205 | {
206 | (void)snprintf(f, sizeof(f), "%us", (unsigned int)s);
207 | (void)util_safe_strcat(result, sizeof(result), f);
208 | }
209 |
210 | return result;
211 | }
212 |
213 | bool util_hms_to_seconds(const char *hms, uint32_t *result)
214 | {
215 | uint32_t field_val = 0UL;
216 |
217 | if (result == NULL)
218 | {
219 | return false;
220 | }
221 |
222 | *result = 0UL;
223 |
224 | if (hms == NULL)
225 | {
226 | return false;
227 | }
228 |
229 | if (strlen(hms) < (size_t)2)
230 | {
231 | return false;
232 | }
233 |
234 | if (hms[strlen(hms) - (size_t)1] != 's' && hms[strlen(hms) - (size_t)1] != 'm' && hms[strlen(hms) - (size_t)1] != 'h')
235 | {
236 | return false;
237 | }
238 |
239 | while (true)
240 | {
241 | if (*hms == '\0')
242 | {
243 | break;
244 | }
245 |
246 | if (isdigit((int)*hms))
247 | {
248 | field_val *= 10UL;
249 | field_val += *hms - '0';
250 | }
251 | else if (*hms == 'h')
252 | {
253 | *result += field_val * 3600UL;
254 | field_val = 0UL;
255 | }
256 | else if (*hms == 'm')
257 | {
258 | *result += field_val * 60UL;
259 | field_val = 0UL;
260 | }
261 | else if (*hms == 's')
262 | {
263 | *result += field_val;
264 | field_val = 0UL;
265 | }
266 | else
267 | {
268 | return false;
269 | }
270 |
271 | hms++;
272 | }
273 |
274 | return true;
275 | }
276 |
277 | uint32_t util_hash_djb2(const char *str)
278 | {
279 | uint32_t hash = 5381UL;
280 | char c;
281 |
282 | while ((c = *str++))
283 | {
284 | hash = ((hash << 5) + hash) + (uint32_t)c;
285 | }
286 |
287 | return hash;
288 | }
--------------------------------------------------------------------------------
/main/sms.c:
--------------------------------------------------------------------------------
1 | /*
2 |
3 | MIT License
4 |
5 | Copyright (c) John Blaiklock 2022 BlueBridge
6 |
7 | Permission is hereby granted, free of charge, to any person obtaining a copy
8 | of this software and associated documentation files (the "Software"), to deal
9 | in the Software without restriction, including without limitation the rights
10 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
11 | copies of the Software, and to permit persons to whom the Software is
12 | furnished to do so, subject to the following conditions:
13 |
14 | The above copyright notice and this permission notice shall be included in all
15 | copies or substantial portions of the Software.
16 |
17 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
18 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
19 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
20 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
21 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
22 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
23 | SOFTWARE.
24 |
25 | */
26 |
27 | /***************
28 | *** INCLUDES ***
29 | ***************/
30 |
31 | #include
32 | #include "freertos/FreeRTOS.h"
33 | #include "freertos/queue.h"
34 | #include "esp_log.h"
35 | #include "sms.h"
36 | #include "modem.h"
37 | #include "pdu.h"
38 | #include "util.h"
39 |
40 | /**************
41 | *** DEFINES ***
42 | **************/
43 |
44 | /************
45 | *** TYPES ***
46 | ************/
47 |
48 | /********************************
49 | *** LOCAL FUNCTION PROTOTYPES ***
50 | ********************************/
51 |
52 | static void sms_notification_callback(uint32_t sms_id);
53 |
54 | /**********************
55 | *** LOCAL VARIABLES ***
56 | **********************/
57 |
58 | static QueueHandle_t sms_waiting_id_queue_handle; ///< Queue of id's of received SMS messages
59 |
60 | /***********************
61 | *** GLOBAL VARIABLES ***
62 | ***********************/
63 |
64 | /****************
65 | *** CONSTANTS ***
66 | ****************/
67 |
68 | /**********************
69 | *** LOCAL FUNCTIONS ***
70 | **********************/
71 |
72 | /**
73 | * Call back function called by modem when a new SMS has been received
74 | *
75 | * @param sms_id The id of the received message
76 | */
77 | static void sms_notification_callback(uint32_t sms_id)
78 | {
79 | ESP_LOGI(pcTaskGetName(NULL), "SMS received notification, SMS Id is %u", sms_id);
80 | xQueueSendToBack(sms_waiting_id_queue_handle, (const void *)(&sms_id), (TickType_t)0);
81 | }
82 |
83 | /***********************
84 | *** GLOBAL FUNCTIONS ***
85 | ***********************/
86 |
87 | void sms_init(void)
88 | {
89 | sms_waiting_id_queue_handle = xQueueCreate((UBaseType_t)10, (UBaseType_t)sizeof(uint32_t));
90 | ModemSetSmsNotificationCallback(sms_notification_callback);
91 | }
92 |
93 | bool sms_check_for_new(uint32_t *sms_id)
94 | {
95 | if (sms_id == NULL)
96 | {
97 | return false;
98 | }
99 |
100 | if (xQueueReceive(sms_waiting_id_queue_handle, sms_id, (TickType_t)0) == pdTRUE )
101 | {
102 | return true;
103 | }
104 |
105 | return false;
106 | }
107 |
108 | bool sms_receive(uint32_t sms_id, char *phone_number, size_t phone_number_buffer_length, char *message_text, size_t message_text_buffer_length)
109 | {
110 | size_t length;
111 | uint8_t *pdu_ascii_hex_buf;
112 | uint8_t pdu_bin_buf[SMS_MAX_PDU_LENGTH];
113 | time_t receive_time;
114 | char ascii_hex_byte[3];
115 | int32_t text_length;
116 | size_t i;
117 |
118 | pdu_ascii_hex_buf = pvPortMalloc((size_t)(SMS_MAX_PDU_LENGTH * 2 + 1));
119 | if (pdu_ascii_hex_buf == NULL)
120 | {
121 | return false;
122 | }
123 |
124 | ModemStatus_t modem_status = ModemSmsReceiveMessage(sms_id, &length, pdu_ascii_hex_buf, (size_t)(SMS_MAX_PDU_LENGTH * 2 + 1), 1000UL);
125 | ESP_LOGI(pcTaskGetName(NULL), "ModemSmsReceiveMessage length=%u %s", (uint32_t)length, ModemStatusToText(modem_status));
126 |
127 | if (modem_status == MODEM_OK && length > (size_t)0)
128 | {
129 | // convert ascii hex to binary
130 | ascii_hex_byte[2] = (uint8_t)'\0';
131 | for (i = (size_t)0; i < length / (size_t)2; i++)
132 | {
133 | ascii_hex_byte[0] = pdu_ascii_hex_buf[(unsigned int)i * 2];
134 | ascii_hex_byte[1] = pdu_ascii_hex_buf[(unsigned int)i * 2 + 1];
135 | pdu_bin_buf[(unsigned int)i] = (uint8_t)util_htoi(ascii_hex_byte);
136 | }
137 |
138 | // decode sms pdu
139 | text_length = (int32_t)pdu_decode((const unsigned char *)pdu_bin_buf,
140 | (int)length / 2,
141 | &receive_time,
142 | phone_number,
143 | (int)phone_number_buffer_length,
144 | message_text,
145 | (int)message_text_buffer_length);
146 |
147 | // parse sms text for key/value pairs
148 | if (text_length > 0)
149 | {
150 | vPortFree(pdu_ascii_hex_buf);
151 | return true;
152 | }
153 | else
154 | {
155 | ESP_LOGI(pcTaskGetName(NULL), "SMS PDU decode failed %d", text_length);
156 | ESP_LOGI(pcTaskGetName(NULL), "ModemSmsReceiveMessage length=%u %s", (uint32_t)length, ModemStatusToText(modem_status));
157 | ESP_LOGI(pcTaskGetName(NULL), "ModemSmsReceiveMessage pdu=%s", pdu_ascii_hex_buf);
158 | }
159 | }
160 |
161 | vPortFree(pdu_ascii_hex_buf);
162 |
163 | return false;
164 | }
165 |
166 | bool sms_send(const char *message_text, const char *phone_number)
167 | {
168 | char *ascii_hex_pdu = NULL;
169 | uint8_t *binary_pdu = NULL;
170 | size_t pdu_binary_length;
171 | size_t i;
172 | char ascii_hex_byte[3];
173 | bool success = false;
174 | ModemStatus_t modem_status;
175 |
176 | if (message_text != NULL && phone_number != NULL)
177 | {
178 | ascii_hex_pdu = pvPortMalloc((size_t)(SMS_MAX_PDU_LENGTH * 2 + 1));
179 | binary_pdu = pvPortMalloc((size_t)SMS_MAX_PDU_LENGTH);
180 |
181 | if (ascii_hex_pdu != NULL && binary_pdu != NULL)
182 | {
183 | pdu_binary_length = (int32_t)pdu_encode(NULL, phone_number, message_text, (unsigned char *)binary_pdu, SMS_MAX_PDU_LENGTH);
184 | if (pdu_binary_length > 0)
185 | {
186 | ascii_hex_pdu[0] = '\0';
187 | for (i = 0; i < pdu_binary_length; i++)
188 | {
189 | (void)sprintf(ascii_hex_byte, "%02x", binary_pdu[i]);
190 | (void)util_safe_strcat(ascii_hex_pdu, (size_t)(SMS_MAX_PDU_LENGTH * 2), ascii_hex_byte);
191 | }
192 |
193 | modem_status = ModemSmsSendMessage(ascii_hex_pdu, 60000UL);
194 | ESP_LOGI(pcTaskGetName(NULL), "ModemSmsSendMessage %s", ModemStatusToText(modem_status));
195 | success = (modem_status == MODEM_OK);
196 | }
197 | }
198 |
199 | vPortFree(ascii_hex_pdu);
200 | vPortFree(binary_pdu);
201 | }
202 |
203 | return success;
204 | }
--------------------------------------------------------------------------------
/components/n2klib/ActisenseReader.cpp:
--------------------------------------------------------------------------------
1 | /*
2 | ActisenseReader.cpp
3 |
4 | Copyright (c) 2015-2021 Timo Lappalainen, Kave Oy, www.kave.fi
5 |
6 | Permission is hereby granted, free of charge, to any person obtaining a copy of
7 | this software and associated documentation files (the "Software"), to deal in
8 | the Software without restriction, including without limitation the rights to use,
9 | copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the
10 | Software, and to permit persons to whom the Software is furnished to do so,
11 | subject to the following conditions:
12 |
13 | The above copyright notice and this permission notice shall be included in all
14 | copies or substantial portions of the Software.
15 |
16 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
17 | INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A
18 | PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
19 | HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF
20 | CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE
21 | OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
22 |
23 |
24 | This is class for reading Actisense format messages from given stream.
25 | */
26 | #include "ActisenseReader.h"
27 | #include
28 |
29 | //*****************************************************************************
30 | tActisenseReader::tActisenseReader() {
31 | DefaultSource=65;
32 | ReadStream=0;
33 | ClearBuffer();
34 | }
35 |
36 | //*****************************************************************************
37 | void tActisenseReader::ClearBuffer() {
38 | MsgWritePos=0;
39 | byteSum=0;
40 | StartOfTextReceived=false;
41 | MsgIsComing=false;
42 | EscapeReceived=false;
43 | }
44 |
45 | //*****************************************************************************
46 | bool tActisenseReader::AddByteToBuffer(char NewByte) {
47 | if (MsgWritePos>=MAX_STREAM_MSG_BUF_LEN) return false;
48 |
49 | MsgBuf[MsgWritePos]=NewByte;
50 | MsgWritePos++;
51 | if ( MsgBuf[1]+3!=MsgWritePos ) byteSum+=NewByte; // !Do not add CRC to byteSum
52 | return true;
53 | }
54 |
55 | #define Escape 0x10
56 | #define StartOfText 0x02
57 | #define EndOfText 0x03
58 | #define MsgTypeN2kData 0x93
59 | #define MsgTypeN2kRequest 0x94
60 |
61 | //*****************************************************************************
62 | bool tActisenseReader::CheckMessage(tN2kMsg &N2kMsg) {
63 |
64 | N2kMsg.Clear();
65 |
66 | if (MsgWritePos!=MsgBuf[1]+3) {
67 | return false; // Length does not match. Add type, length and crc
68 | }
69 |
70 | uint8_t CheckSum = (uint8_t)((byteSum == 0) ? 0 : (256 - byteSum));
71 | if ( CheckSum!=MsgBuf[MsgWritePos-1] ) {
72 | return false; // Checksum does not match
73 | }
74 |
75 | int i=2;
76 | N2kMsg.Priority=MsgBuf[i++];
77 | N2kMsg.PGN=GetBuf3ByteUInt(i,MsgBuf);
78 | N2kMsg.Destination=MsgBuf[i++];
79 | if ( MsgBuf[0]==MsgTypeN2kData ) {
80 | N2kMsg.Source=MsgBuf[i++];
81 | N2kMsg.MsgTime=GetBuf4ByteUInt(i,MsgBuf);
82 | } else {
83 | N2kMsg.Source=DefaultSource;
84 | N2kMsg.MsgTime=millis();
85 | }
86 | N2kMsg.DataLen=MsgBuf[i++];
87 |
88 | if ( N2kMsg.DataLen>tN2kMsg::MaxDataLen ) {
89 | N2kMsg.Clear();
90 | return false; // Too long data
91 | }
92 |
93 | for (int j=0; i<02><93>