├── pages
├── __init__.py
├── page_landing.py
├── page_patterns.py
├── helpers.py
├── page_inverse.py
├── shared.py
└── page_kinematics.py
├── tests
├── __init__.py
├── test_misc.py
├── README.md
├── test_kinematics.py
├── test_patterns.py
├── helpers.py
├── ik_cases
│ ├── case1.py
│ ├── case2.py
│ └── case3.py
├── test_ik.py
├── pattern_cases
│ ├── case1.py
│ └── case2.py
└── kinematics_cases
│ ├── case1.py
│ └── case2.py
├── hexapod
├── __init__.py
├── templates
│ ├── pose_template.py
│ └── figure_template.py
├── ik_solver
│ ├── shared.py
│ ├── recompute_hexapod.py
│ ├── helpers.py
│ ├── README.md
│ ├── ik_solver.py
│ └── ik_solver2.py
├── const.py
├── ground_contact_solver
│ ├── shared.py
│ ├── ground_contact_solver2.py
│ └── ground_contact_solver.py
├── plotter.py
├── linkage.py
├── points.py
└── models.py
├── widgets
├── __init__.py
├── pose_control
│ ├── generic_input_ui.py
│ ├── generic_daq_slider_ui.py
│ ├── components.py
│ ├── generic_slider_ui.py
│ ├── kinematics_section_maker.py
│ └── joint_widget_maker.py
├── section_maker.py
├── leg_patterns_ui.py
├── dimensions_ui.py
└── ik_ui.py
├── Procfile
├── .gitignore
├── assets
└── favicon.ico
├── app.py
├── .flake8
├── checker
├── texts.py
├── requirements.txt
├── .travis.yml
├── .codeclimate.yml
├── LICENSE
├── settings.py
├── index.py
├── style_settings.py
├── README.md
├── external_css
├── dark.css
└── light.css
└── .pylintrc
/pages/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/tests/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/hexapod/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/widgets/__init__.py:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/Procfile:
--------------------------------------------------------------------------------
1 | web: gunicorn index:server
2 |
--------------------------------------------------------------------------------
/.gitignore:
--------------------------------------------------------------------------------
1 | .DS_Store
2 | **/__pycache__
3 | .vscode/settings.json
4 | venv
5 | .env
6 | *.pyc
--------------------------------------------------------------------------------
/assets/favicon.ico:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/mithi/hexapod-robot-simulator/HEAD/assets/favicon.ico
--------------------------------------------------------------------------------
/app.py:
--------------------------------------------------------------------------------
1 | import os
2 | import dash
3 | from texts import APP_TITLE
4 | from style_settings import EXTERNAL_STYLESHEETS
5 |
6 | app = dash.Dash(__name__, external_stylesheets=EXTERNAL_STYLESHEETS)
7 | app.title = APP_TITLE
8 | server = app.server
9 | server.secret_key = os.environ.get("secret_key", "secret")
10 | app.config.suppress_callback_exceptions = True
11 |
--------------------------------------------------------------------------------
/pages/page_landing.py:
--------------------------------------------------------------------------------
1 | import dash_html_components as html
2 | from texts import URL_IMG_LANDING
3 |
4 | img = html.Img(src=URL_IMG_LANDING, style={"width": "100%", "height": "auto"},)
5 |
6 | layout = html.Div(
7 | [
8 | html.Div(img, style={"width": "20%", "height": "auto"}),
9 | html.Div(html.Br(), style={"width": "auto", "height": "auto"}),
10 | ],
11 | style={"display": "flex", "flex-direction": "row"},
12 | )
13 |
--------------------------------------------------------------------------------
/tests/test_misc.py:
--------------------------------------------------------------------------------
1 | from settings import (
2 | DEBUG_MODE,
3 | ASSERTION_ENABLED,
4 | PRINT_IK_LOCAL_LEG,
5 | PRINT_IK,
6 | PRINT_MODEL_ON_UPDATE,
7 | RECOMPUTE_HEXAPOD,
8 | )
9 |
10 |
11 | def test_deploy_minimum():
12 | assert not DEBUG_MODE
13 | assert not ASSERTION_ENABLED
14 | assert not PRINT_IK_LOCAL_LEG
15 | assert not PRINT_IK
16 | assert not PRINT_MODEL_ON_UPDATE
17 | assert RECOMPUTE_HEXAPOD
18 |
--------------------------------------------------------------------------------
/.flake8:
--------------------------------------------------------------------------------
1 | [flake8]
2 | ignore = E203, E266, E501, W503
3 | # See https://github.com/psf/black/blob/master/README.md#line-length for more details
4 | max-line-length = 90
5 | max-complexity = 18
6 | select = B,C,E,F,W,T4,B9
7 | # We need to configure the mypy.ini because the flake8-mypy's default
8 | # options don't properly override it, so if we don't specify it we get
9 | # half of the config from mypy.ini and half from flake8-mypy.
10 | mypy_config = mypy.ini
--------------------------------------------------------------------------------
/checker:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env bash
2 | black .
3 | python -m pytest
4 | python -m py_compile ./*/*.py ./*.py ./*/*/*.py
5 | flake8 ./*/*.py ./*.py ./*/*/*.py
6 | pylint ./*.py */*.py */*/*.py --reports=y --ignore=page_kinematics.py,ik_solver.py --disable=broad-except,too-few-public-methods,attribute-defined-outside-init,too-many-locals,too-many-instance-attributes,too-many-arguments,bad-continuation,missing-class-docstring,missing-module-docstring,missing-function-docstring,invalid-name,duplicate-code
7 |
--------------------------------------------------------------------------------
/widgets/pose_control/generic_input_ui.py:
--------------------------------------------------------------------------------
1 | from widgets.pose_control.joint_widget_maker import (
2 | make_all_joint_widgets,
3 | make_number_widget,
4 | )
5 | from widgets.pose_control.kinematics_section_maker import make_section
6 |
7 | # ................................
8 | # COMPONENTS
9 | # ................................
10 |
11 | widgets = make_all_joint_widgets(joint_input_function=make_number_widget)
12 | KINEMATICS_WIDGETS_SECTION = make_section(widgets, add_joint_names=True)
13 |
--------------------------------------------------------------------------------
/widgets/pose_control/generic_daq_slider_ui.py:
--------------------------------------------------------------------------------
1 | from widgets.pose_control.joint_widget_maker import (
2 | make_all_joint_widgets,
3 | make_daq_slider,
4 | )
5 | from widgets.pose_control.kinematics_section_maker import make_section
6 |
7 | # ................................
8 | # COMPONENTS
9 | # ................................
10 |
11 | widgets = make_all_joint_widgets(joint_input_function=make_daq_slider)
12 | KINEMATICS_WIDGETS_SECTION = make_section(
13 | widgets, style_to_use={"padding": "0 0 0 3em"}
14 | )
15 |
--------------------------------------------------------------------------------
/tests/README.md:
--------------------------------------------------------------------------------
1 |
2 | # Inverse Kinematics Edge Cases
3 |
4 | - Coxia point shoved on ground
5 | - Body contact shoved on ground
6 | - Can't reach target ground point
7 | - Femur length is too long
8 | - Tibia length is too long
9 | - The ground is blocking the path
10 | - Legs too short
11 | - Too many legs off the floor
12 | - All left legs off the ground
13 | - All right legs off the ground
14 | - Angle required is beyond range of motion
15 | - Alpha
16 | - Beta
17 | - Gamma
18 |
19 | # `VirtualHexapod.Update` Edge Cases
20 |
21 | - Unstable. Center of gravity is outside the hexapod's support polygon
--------------------------------------------------------------------------------
/texts.py:
--------------------------------------------------------------------------------
1 | APP_TITLE = "Mithi's Hexapod Robot Simulator"
2 |
3 | URL_KOFI = "https://ko-fi.com/minimithi"
4 | URL_REPO = "https://github.com/mithi/hexapod-robot-simulator"
5 | URL_IMG_LANDING = "https://mithi.github.io/robotics-blog/v2-hexapod-1.gif"
6 |
7 | KINEMATICS_PAGE_PATH = "/kinematics"
8 | IK_PAGE_PATH = "/inverse-kinematics"
9 | PATTERNS_PAGE_PATH = "/leg-patterns"
10 | ROOT_PATH = "/"
11 |
12 | DIMENSIONS_WIDGETS_HEADER = "robot dimensions".upper()
13 | PATTERNS_WIDGETS_HEADER = "leg patterns".upper()
14 | IK_WIDGETS_HEADER = "inverse kinematics".upper()
15 | KINEMATICS_WIDGETS_HEADER = "kinematics".upper()
16 |
--------------------------------------------------------------------------------
/requirements.txt:
--------------------------------------------------------------------------------
1 | astroid==2.4.2
2 | Brotli==1.0.9
3 | click==7.1.2
4 | dash==1.18.1
5 | dash-core-components==1.14.1
6 | dash-daq==0.5.0
7 | dash-html-components==1.1.1
8 | dash-renderer==1.8.3
9 | dash-table==4.11.1
10 | flake8==3.8.4
11 | Flask==1.1.2
12 | Flask-Compress==1.8.0
13 | future==0.18.3
14 | gunicorn==20.0.4
15 | isort==5.7.0
16 | itsdangerous==1.1.0
17 | Jinja2==2.11.3
18 | lazy-object-proxy==1.4.3
19 | MarkupSafe==1.1.1
20 | mccabe==0.6.1
21 | numpy==1.22.0
22 | plotly==4.14.1
23 | pycodestyle==2.6.0
24 | pyflakes==2.2.0
25 | pylint==2.6.0
26 | retrying==1.3.3
27 | six==1.15.0
28 | toml==0.10.2
29 | Werkzeug==2.2.3
30 | wrapt==1.12.1
31 |
--------------------------------------------------------------------------------
/tests/test_kinematics.py:
--------------------------------------------------------------------------------
1 | from hexapod.models import VirtualHexapod
2 | from tests.kinematics_cases import case1, case2
3 | from tests.helpers import assert_hexapod_points_equal
4 |
5 | CASES = [case1, case2]
6 |
7 |
8 | def assert_kinematics(case, assume_ground_targets):
9 | hexapod = VirtualHexapod(case.given_dimensions)
10 | hexapod.update(case.given_poses, assume_ground_targets)
11 | assert_hexapod_points_equal(
12 | hexapod, case.correct_body_points, case.correct_leg_points, case.description
13 | )
14 |
15 |
16 | def test_sample_kinematics():
17 | for case in CASES:
18 | assert_kinematics(case, True)
19 | assert_kinematics(case, False)
20 |
--------------------------------------------------------------------------------
/hexapod/templates/pose_template.py:
--------------------------------------------------------------------------------
1 | # pose = {
2 | # LEG_ID: {
3 | # 'name': LEG_NAME,
4 | # 'id': LEG_ID
5 | # 'coxia': ALPHA,
6 | # 'femur': BETA,
7 | # 'tibia': GAMMA}
8 | # }
9 | # ...
10 | # }
11 |
12 | HEXAPOD_POSE = {
13 | 0: {"coxia": 0, "femur": 0, "tibia": 0, "name": "right-middle", "id": 0},
14 | 1: {"coxia": 0, "femur": 0, "tibia": 0, "name": "right-front", "id": 1},
15 | 2: {"coxia": 0, "femur": 0, "tibia": 0, "name": "left-front", "id": 2},
16 | 3: {"coxia": 0, "femur": 0, "tibia": 0, "name": "left-middle", "id": 3},
17 | 4: {"coxia": 0, "femur": 0, "tibia": 0, "name": "left-back", "id": 4},
18 | 5: {"coxia": 0, "femur": 0, "tibia": 0, "name": "right-back", "id": 5},
19 | }
20 |
--------------------------------------------------------------------------------
/tests/test_patterns.py:
--------------------------------------------------------------------------------
1 | from pages.helpers import make_pose
2 | from hexapod.models import VirtualHexapod
3 | from tests.pattern_cases import case1, case2
4 | from tests.helpers import assert_hexapod_points_equal
5 |
6 |
7 | def test_sample_patterns():
8 | for case in [case1, case2]:
9 | for assume_ground_targets in [True, False]:
10 | poses = make_pose(case.alpha, case.beta, case.gamma)
11 | hexapod = VirtualHexapod(case.given_dimensions)
12 | hexapod.update(poses, assume_ground_targets)
13 | assert_hexapod_points_equal(
14 | hexapod,
15 | case.correct_body_points,
16 | case.correct_leg_points,
17 | case.description,
18 | )
19 |
--------------------------------------------------------------------------------
/.travis.yml:
--------------------------------------------------------------------------------
1 | # Disable sudo to speed up the build
2 | sudo: false
3 |
4 | language: python
5 | python:
6 | - "3.8.1"
7 | cache: pip
8 | install:
9 | - pip install -r requirements.txt
10 | - pip install codecov
11 | script:
12 | - python -m py_compile ./*/*.py ./*.py ./*/*/*.py
13 | - flake8 ./*/*.py ./*.py ./*/*/*.py
14 | - pylint ./*.py */*.py */*/*.py --reports=y --ignore=page_kinematics.py,ik_solver.py --disable=broad-except,too-few-public-methods,attribute-defined-outside-init,too-many-locals,too-many-instance-attributes,too-many-arguments,bad-continuation,missing-class-docstring,missing-module-docstring,missing-function-docstring,invalid-name,duplicate-code
15 | #- python -m pytest
16 | - coverage run -m pytest
17 | - coverage report -m
18 |
19 | # Push the results back to codecov
20 | after_success:
21 | - codecov
22 |
--------------------------------------------------------------------------------
/hexapod/ik_solver/shared.py:
--------------------------------------------------------------------------------
1 | # Functions used for solving inverse kinematics
2 | from hexapod.points import is_counter_clockwise, angle_between, rotz
3 |
4 |
5 | def update_hexapod_points(hexapod, leg_id, points):
6 | leg = hexapod.legs[leg_id]
7 | for point, leg_point in zip(points, leg.all_points):
8 | point.name = leg_point.name
9 | leg.all_points = points
10 |
11 |
12 | def find_twist_frame(hexapod, unit_coxia_vector):
13 | twist = angle_between(unit_coxia_vector, hexapod.x_axis)
14 | is_ccw = is_counter_clockwise(unit_coxia_vector, hexapod.x_axis, hexapod.z_axis)
15 | if is_ccw:
16 | twist = -twist
17 |
18 | twist_frame = rotz(twist)
19 | return twist, twist_frame
20 |
21 |
22 | def compute_twist_wrt_to_world(alpha, coxia_axis):
23 | alpha = (alpha - coxia_axis) % 360
24 | if alpha > 180:
25 | return alpha - 360
26 | return alpha
27 |
--------------------------------------------------------------------------------
/widgets/pose_control/components.py:
--------------------------------------------------------------------------------
1 | import dash_core_components as dcc
2 | import dash_html_components as html
3 | from dash.dependencies import Input
4 | from texts import KINEMATICS_WIDGETS_HEADER
5 | from hexapod.const import NAMES_LEG, NAMES_JOINT
6 |
7 |
8 | def make_joint_callback_inputs_of_one_leg(leg_name):
9 | return [
10 | Input(f"widget-{leg_name}-{joint_name}", "value") for joint_name in NAMES_JOINT
11 | ]
12 |
13 |
14 | def make_all_joint_callback_inputs():
15 | callback_inputs = []
16 | for leg_name in NAMES_LEG:
17 | callback_inputs += make_joint_callback_inputs_of_one_leg(leg_name)
18 | return callback_inputs
19 |
20 |
21 | # ................................
22 | # COMPONENTS
23 | # ................................
24 |
25 | HEADER = html.Label(dcc.Markdown(f"**{KINEMATICS_WIDGETS_HEADER}**"))
26 | KINEMATICS_CALLBACK_INPUTS = make_all_joint_callback_inputs()
27 |
--------------------------------------------------------------------------------
/.codeclimate.yml:
--------------------------------------------------------------------------------
1 | version: "2" # required to adjust maintainability checks
2 | exclude_patterns:
3 | - "hexapod/plotter.py"
4 | - "hexapod/templates/figure_template.py"
5 | - "tests/*_cases/*.py"
6 |
7 | checks:
8 | argument-count:
9 | config:
10 | threshold: 6 # 4
11 | complex-logic:
12 | config:
13 | threshold: 4
14 | file-lines:
15 | config:
16 | threshold: 250
17 | method-complexity:
18 | config:
19 | threshold: 6
20 | method-count:
21 | config:
22 | threshold: 20
23 | method-lines:
24 | config:
25 | threshold: 25
26 | nested-control-flow:
27 | config:
28 | threshold: 4
29 | return-statements:
30 | config:
31 | threshold: 4
32 | similar-code:
33 | config:
34 | threshold: # language-specific defaults. an override will affect all languages.
35 | identical-code:
36 | config:
37 | threshold: # language-specific defaults. an override will affect all languages.
--------------------------------------------------------------------------------
/hexapod/const.py:
--------------------------------------------------------------------------------
1 | from copy import deepcopy
2 | from hexapod.plotter import HexapodPlotter
3 | from hexapod.models import VirtualHexapod, Hexagon, Linkage
4 | from hexapod.templates.figure_template import HEXAPOD_FIGURE
5 | from hexapod.templates.pose_template import HEXAPOD_POSE
6 |
7 | NAMES_LEG = Hexagon.VERTEX_NAMES
8 | NAMES_JOINT = Linkage.POINT_NAMES
9 |
10 | BASE_DIMENSIONS = {
11 | "front": 100,
12 | "side": 100,
13 | "middle": 100,
14 | "coxia": 100,
15 | "femur": 100,
16 | "tibia": 100,
17 | }
18 |
19 |
20 | BASE_IK_PARAMS = {
21 | "hip_stance": 0,
22 | "leg_stance": 0,
23 | "percent_x": 0,
24 | "percent_y": 0,
25 | "percent_z": 0,
26 | "rot_x": 0,
27 | "rot_y": 0,
28 | "rot_z": 0,
29 | }
30 |
31 | BASE_POSE = deepcopy(HEXAPOD_POSE)
32 |
33 | BASE_HEXAPOD = VirtualHexapod(BASE_DIMENSIONS)
34 | BASE_PLOTTER = HexapodPlotter()
35 |
36 | HEXAPOD = deepcopy(BASE_HEXAPOD)
37 | HEXAPOD.update(HEXAPOD_POSE)
38 | BASE_FIGURE = deepcopy(HEXAPOD_FIGURE)
39 | BASE_PLOTTER.update(BASE_FIGURE, HEXAPOD)
40 |
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2020 Mithi Sevilla
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
22 |
--------------------------------------------------------------------------------
/widgets/pose_control/generic_slider_ui.py:
--------------------------------------------------------------------------------
1 | import dash_core_components as dcc
2 | import dash_html_components as html
3 | from hexapod.const import NAMES_LEG
4 | from widgets.section_maker import make_section_type4
5 | from widgets.pose_control.joint_widget_maker import (
6 | make_all_joint_widgets,
7 | make_slider,
8 | )
9 | from widgets.pose_control.components import HEADER
10 |
11 |
12 | def make_leg_sections(jwidgets):
13 | widget_sections = []
14 | header_section = make_section_type4(
15 | "", html.H5("coxia"), html.H5("femur"), html.H5("tibia")
16 | )
17 | widget_sections.append(header_section)
18 |
19 | for leg in NAMES_LEG:
20 | header = html.Label(dcc.Markdown("**`{}`**".format(leg)))
21 | coxia = jwidgets[leg]["coxia"]
22 | femur = jwidgets[leg]["femur"]
23 | tibia = jwidgets[leg]["tibia"]
24 | section = make_section_type4(header, coxia, femur, tibia)
25 | widget_sections.append(section)
26 |
27 | return html.Div(widget_sections)
28 |
29 |
30 | # ................................
31 | # COMPONENTS
32 | # ................................
33 |
34 | widgets = make_all_joint_widgets(joint_input_function=make_slider)
35 | sections = make_leg_sections(widgets)
36 | KINEMATICS_WIDGETS_SECTION = html.Div([HEADER, sections])
37 |
--------------------------------------------------------------------------------
/widgets/pose_control/kinematics_section_maker.py:
--------------------------------------------------------------------------------
1 | import dash_core_components as dcc
2 | import dash_html_components as html
3 | from widgets.section_maker import make_section_type3, make_section_type2
4 | from widgets.pose_control.components import HEADER
5 |
6 |
7 | def make_section(joint_widgets, add_joint_names=False, style_to_use=None):
8 | names = [
9 | "left-front",
10 | "right-front",
11 | "left-middle",
12 | "right-middle",
13 | "left-back",
14 | "right-back",
15 | ]
16 |
17 | lf, rf, lm, rm, lb, rb = [
18 | make_leg_section(name, joint_widgets, add_joint_names) for name in names
19 | ]
20 |
21 | widget_sections = html.Div(
22 | [
23 | make_section_type2(lf, rf),
24 | make_section_type2(lm, rm),
25 | make_section_type2(lb, rb),
26 | ],
27 | style=style_to_use or {},
28 | )
29 |
30 | return html.Div([HEADER, widget_sections])
31 |
32 |
33 | def code(name):
34 | return dcc.Markdown(f"`{name}`")
35 |
36 |
37 | def make_leg_section(name, joint_widgets, add_joint_names=False):
38 | header = html.Label(dcc.Markdown(f"( `{name.upper()}` )"))
39 | coxia = joint_widgets[name]["coxia"]
40 | femur = joint_widgets[name]["femur"]
41 | tibia = joint_widgets[name]["tibia"]
42 |
43 | if add_joint_names:
44 | section = make_section_type3(
45 | coxia, femur, tibia, code("coxia"), code("femur"), code("tibia")
46 | )
47 | else:
48 | section = make_section_type3(coxia, femur, tibia)
49 |
50 | return html.Div([header, section])
51 |
--------------------------------------------------------------------------------
/widgets/section_maker.py:
--------------------------------------------------------------------------------
1 | # Used to make html divisions
2 | import dash_html_components as html
3 |
4 |
5 | def make_section_type3(div1, div2, div3, name1="", name2="", name3=""):
6 | return html.Div(
7 | [
8 | html.Div([div1, name1], style={"width": "33%"}),
9 | html.Div([div2, name2], style={"width": "33%"}),
10 | html.Div([div3, name3], style={"width": "33%"}),
11 | ],
12 | style={"display": "flex"},
13 | )
14 |
15 |
16 | def make_section_type4(div1, div2, div3, div4):
17 | return html.Div(
18 | [
19 | html.Div(div1, style={"width": "16%"}),
20 | html.Div(div2, style={"width": "28%"}),
21 | html.Div(div3, style={"width": "28%"}),
22 | html.Div(div4, style={"width": "28%"}),
23 | ],
24 | style={"display": "flex"},
25 | )
26 |
27 |
28 | def make_section_type2(div1, div2):
29 | return html.Div(
30 | [
31 | html.Div(div1, style={"width": "50%"}),
32 | html.Div(div2, style={"width": "50%"}),
33 | ],
34 | style={"display": "flex"},
35 | )
36 |
37 |
38 | def make_section_type6(div1, div2, div3, div4, div5, div6):
39 | return html.Div(
40 | [
41 | html.Div(div1, style={"width": "17%"}),
42 | html.Div(div2, style={"width": "17%"}),
43 | html.Div(div3, style={"width": "17%"}),
44 | html.Div(div4, style={"width": "17%"}),
45 | html.Div(div5, style={"width": "16%"}),
46 | html.Div(div6, style={"width": "16%"}),
47 | ],
48 | style={"display": "flex"},
49 | )
50 |
--------------------------------------------------------------------------------
/tests/helpers.py:
--------------------------------------------------------------------------------
1 | import numpy as np
2 |
3 |
4 | def assert_poses_equal(result_poses, correct_poses, description):
5 | for k, v in result_poses.items():
6 | msg = f"Unequal Poses\n{correct_poses[k]}\n{v}\n(case: {description})"
7 | assert correct_poses[k]["name"] == v["name"]
8 | assert correct_poses[k]["id"] == v["id"]
9 | assert np.isclose(correct_poses[k]["coxia"], v["coxia"]), msg
10 | assert np.isclose(correct_poses[k]["femur"], v["femur"]), msg
11 | assert np.isclose(correct_poses[k]["tibia"], v["tibia"]), msg
12 |
13 |
14 | def assert_hexapod_points_equal(
15 | hexapod, correct_body_points, correct_leg_points, description
16 | ):
17 | def msg(a, b):
18 | return f"Unequal Vectors\nexpected: {a}\n....found: {b}\n(case: {description})"
19 |
20 | for point_a, point_b in zip(correct_body_points, hexapod.body.all_points):
21 | assert point_a.__eq__(point_b, percent_tol=0.0075), msg(point_a, point_b)
22 |
23 | for leg_set, leg in zip(correct_leg_points, hexapod.legs):
24 | for point_a, point_b in zip(leg_set, leg.all_points):
25 | assert point_a.__eq__(point_b, percent_tol=0.0075), msg(point_a, point_b)
26 |
27 |
28 | def assert_two_hexapods_equal(hexapod1, hexapod2, description):
29 | def msg(a, b):
30 | return f"Unequal Vectors\n1: {a}\n2:{b}\n(case: {description})"
31 |
32 | for point_a, point_b in zip(hexapod1.body.all_points, hexapod2.body.all_points):
33 | assert point_a.__eq__(point_b, percent_tol=0.0075), msg(point_a, point_b)
34 |
35 | for leg_a, leg_b in zip(hexapod1.legs, hexapod2.legs):
36 | for point_a, point_b in zip(leg_a.all_points, leg_b.all_points):
37 | assert point_a.__eq__(point_b, percent_tol=0.0075), msg(point_a, point_b)
38 |
--------------------------------------------------------------------------------
/settings.py:
--------------------------------------------------------------------------------
1 | # ***************************
2 | # Settings
3 | # ***************************
4 |
5 | # The range of each leg joint in degrees
6 | ALPHA_MAX_ANGLE = 90
7 | BETA_MAX_ANGLE = 180
8 | GAMMA_MAX_ANGLE = 180
9 | BODY_MAX_ANGLE = 40
10 |
11 | # LEG STANCE
12 | # would define the starting leg position used to compute
13 | # the target ground contact for inverse kinematics poses
14 | # femur/ beta = -leg_stance
15 | # tibia/ gamma = leg_stance
16 | LEG_STANCE_MAX_ANGLE = 90
17 |
18 | # HIP STANCE
19 | # would defined the starting hip position used to compute
20 | # the target ground contact for inverse kinematics poses
21 | # coxia/alpha angle of
22 | # right_front = -hip_stance
23 | # left_front = +hip_stance
24 | # left_back = -hip_stance
25 | # right_back = +hip_stance
26 | # left_middle = 0
27 | # right_middle = 0
28 | HIP_STANCE_MAX_ANGLE = 45
29 |
30 | # Too slow? set UPDATE_MODE='mouseup'
31 | # Makes widgets only start updating when you release the mouse button
32 | UPDATE_MODE = "drag"
33 |
34 | DEBUG_MODE = False
35 | ASSERTION_ENABLED = False
36 |
37 | # The inverse kinematics solver already updates the points of the hexapod
38 | # But there is no guarantee that this pose is correct
39 | # So better update a fresh hexapod with the resulting poses
40 | RECOMPUTE_HEXAPOD = True
41 |
42 | PRINT_IK_LOCAL_LEG = False
43 | PRINT_IK = False
44 | PRINT_MODEL_ON_UPDATE = False
45 |
46 | # 1 - Use the daq slider UI
47 | # 2 - Use the generic slider UI
48 | # Anything else defaults to the generic input UI, which I prefer
49 | WHICH_POSE_CONTROL_UI = 0
50 |
51 | # Make it more granular to prevent overloading the server
52 | SLIDER_ANGLE_RESOLUTION = 1.5
53 | INPUT_DIMENSIONS_RESOLUTION = 1
54 |
55 | UI_GRAPH_HEIGHT = "600px"
56 | UI_GRAPH_WIDTH = "63%"
57 | UI_SIDEBAR_WIDTH = "37%"
58 |
--------------------------------------------------------------------------------
/widgets/leg_patterns_ui.py:
--------------------------------------------------------------------------------
1 | # Widgets used to set the leg pose of all legs uniformly
2 | import dash_core_components as dcc
3 | import dash_html_components as html
4 | from dash.dependencies import Input
5 | import dash_daq
6 | from texts import PATTERNS_WIDGETS_HEADER
7 | from settings import (
8 | ALPHA_MAX_ANGLE,
9 | BETA_MAX_ANGLE,
10 | GAMMA_MAX_ANGLE,
11 | UPDATE_MODE,
12 | SLIDER_ANGLE_RESOLUTION,
13 | )
14 | from style_settings import SLIDER_THEME, SLIDER_HANDLE_COLOR, SLIDER_COLOR
15 |
16 |
17 | def make_slider(slider_id, name, max_angle):
18 |
19 | handle_style = {
20 | "showCurrentValue": True,
21 | "color": SLIDER_HANDLE_COLOR,
22 | "label": name,
23 | }
24 |
25 | daq_slider = dash_daq.Slider( # pylint: disable=not-callable
26 | id=slider_id,
27 | min=-max_angle,
28 | max=max_angle,
29 | value=1.5,
30 | step=SLIDER_ANGLE_RESOLUTION,
31 | size=300,
32 | updatemode=UPDATE_MODE,
33 | handleLabel=handle_style,
34 | color={"default": SLIDER_COLOR},
35 | theme=SLIDER_THEME,
36 | )
37 |
38 | return html.Div(daq_slider, style={"padding": "2em"})
39 |
40 |
41 | # ................................
42 | # COMPONENTS
43 | # ................................
44 |
45 | HEADER = html.Label(dcc.Markdown(f"**{PATTERNS_WIDGETS_HEADER}**"))
46 | WIDGET_NAMES = ["alpha", "beta", "gamma"]
47 | PATTERNS_WIDGET_IDS = [f"widget-{name}" for name in WIDGET_NAMES]
48 | PATTERNS_CALLBACK_INPUTS = [Input(i, "value") for i in PATTERNS_WIDGET_IDS]
49 |
50 | max_angles = [ALPHA_MAX_ANGLE, BETA_MAX_ANGLE, GAMMA_MAX_ANGLE]
51 | widgets = [
52 | make_slider(id, name, angle)
53 | for id, name, angle in zip(PATTERNS_WIDGET_IDS, WIDGET_NAMES, max_angles)
54 | ]
55 | PATTERNS_WIDGETS_SECTION = html.Div([HEADER] + widgets)
56 |
--------------------------------------------------------------------------------
/widgets/dimensions_ui.py:
--------------------------------------------------------------------------------
1 | # Widgets used to set the dimensions of the hexapod
2 | import dash_core_components as dcc
3 | import dash_html_components as html
4 | from dash.dependencies import Input
5 | from texts import DIMENSIONS_WIDGETS_HEADER
6 | from settings import INPUT_DIMENSIONS_RESOLUTION
7 | from style_settings import NUMBER_INPUT_STYLE
8 | from widgets.section_maker import make_section_type3
9 |
10 |
11 | def make_number_widget(_name, _value):
12 | return dcc.Input(
13 | id=_name,
14 | type="number",
15 | value=_value,
16 | min=0,
17 | step=INPUT_DIMENSIONS_RESOLUTION,
18 | style=NUMBER_INPUT_STYLE,
19 | )
20 |
21 |
22 | def _code(name):
23 | return dcc.Markdown(f"`{name}`")
24 |
25 |
26 | # ................................
27 | # COMPONENTS
28 | # ................................
29 |
30 | HEADER = html.Label(dcc.Markdown(f"**{DIMENSIONS_WIDGETS_HEADER}**"))
31 | WIDGET_NAMES = ["front", "side", "middle", "coxia", "femur", "tibia"]
32 | DIMENSION_WIDGET_IDS = [f"widget-dimension-{name}" for name in WIDGET_NAMES]
33 | DIMENSION_CALLBACK_INPUTS = [Input(id, "value") for id in DIMENSION_WIDGET_IDS]
34 |
35 | widgets = [make_number_widget(widget_id, 100) for widget_id in DIMENSION_WIDGET_IDS]
36 | sections = [
37 | make_section_type3(
38 | widgets[0],
39 | widgets[1],
40 | widgets[2],
41 | _code(WIDGET_NAMES[0]),
42 | _code(WIDGET_NAMES[1]),
43 | _code(WIDGET_NAMES[2]),
44 | ),
45 | make_section_type3(
46 | widgets[3],
47 | widgets[4],
48 | widgets[5],
49 | _code(WIDGET_NAMES[3]),
50 | _code(WIDGET_NAMES[4]),
51 | _code(WIDGET_NAMES[5]),
52 | ),
53 | ]
54 |
55 | DIMENSIONS_WIDGETS_SECTION = html.Div(
56 | [HEADER, html.Div(sections, style={"display": "flex"}), html.Br()]
57 | )
58 |
--------------------------------------------------------------------------------
/pages/page_patterns.py:
--------------------------------------------------------------------------------
1 | import json
2 | from dash.dependencies import Output
3 | from app import app
4 | from hexapod.models import VirtualHexapod
5 | from hexapod.const import BASE_PLOTTER
6 | from widgets.leg_patterns_ui import PATTERNS_WIDGETS_SECTION, PATTERNS_CALLBACK_INPUTS
7 | from pages import helpers, shared
8 |
9 |
10 | # ......................
11 | # Page layout
12 | # ......................
13 |
14 | GRAPH_ID = "graph-patterns"
15 | MESSAGE_SECTION_ID = "message-patterns"
16 | PARAMETERS_SECTION_ID = "parameters-pattens"
17 |
18 | sidebar = shared.make_standard_page_sidebar(
19 | MESSAGE_SECTION_ID, PARAMETERS_SECTION_ID, PATTERNS_WIDGETS_SECTION
20 | )
21 |
22 | layout = shared.make_standard_page_layout(GRAPH_ID, sidebar)
23 |
24 |
25 | # ......................
26 | # Update page
27 | # ......................
28 |
29 | outputs, inputs, states = shared.make_standard_page_callback_params(
30 | GRAPH_ID, PARAMETERS_SECTION_ID, MESSAGE_SECTION_ID
31 | )
32 |
33 |
34 | @app.callback(outputs, inputs, states)
35 | def update_patterns_page(dimensions_json, poses_json, relayout_data, figure):
36 |
37 | dimensions = helpers.load_params(dimensions_json, "dims")
38 | poses = helpers.load_params(poses_json, "pose")
39 | hexapod = VirtualHexapod(dimensions)
40 |
41 | try:
42 | hexapod.update(poses)
43 | except Exception as alert:
44 | return figure, helpers.make_alert_message(alert)
45 |
46 | BASE_PLOTTER.update(figure, hexapod)
47 | helpers.change_camera_view(figure, relayout_data)
48 | return figure, ""
49 |
50 |
51 | # ......................
52 | # Update parameters
53 | # ......................
54 |
55 | output_parameter = Output(PARAMETERS_SECTION_ID, "children")
56 | input_parameters = PATTERNS_CALLBACK_INPUTS
57 |
58 |
59 | @app.callback(output_parameter, input_parameters)
60 | def update_poses_alpha_beta_gamma(alpha, beta, gamma):
61 | return json.dumps(helpers.make_pose(alpha, beta, gamma))
62 |
--------------------------------------------------------------------------------
/tests/ik_cases/case1.py:
--------------------------------------------------------------------------------
1 | description = "IK Random Pose #1"
2 |
3 | # ********************************
4 | # Dimensions
5 | # ********************************
6 |
7 | given_dimensions = {
8 | "front": 70,
9 | "side": 115,
10 | "middle": 120,
11 | "coxia": 60,
12 | "femur": 130,
13 | "tibia": 150,
14 | }
15 |
16 | # ********************************
17 | # IK Parameters
18 | # ********************************
19 |
20 | given_ik_parameters = {
21 | "hip_stance": 7,
22 | "leg_stance": 32,
23 | "percent_x": 0.35,
24 | "percent_y": 0.25,
25 | "percent_z": -0.2,
26 | "rot_x": 2.5,
27 | "rot_y": -9,
28 | "rot_z": 14,
29 | }
30 |
31 | # ********************************
32 | # Poses
33 | # ********************************
34 |
35 | correct_poses = {
36 | 0: {
37 | "name": "right-middle",
38 | "id": 0,
39 | "coxia": -36.89755490432384,
40 | "femur": 26.276957259313683,
41 | "tibia": -38.39772518650969,
42 | },
43 | 1: {
44 | "name": "right-front",
45 | "id": 1,
46 | "coxia": -31.715493484789533,
47 | "femur": 27.717090725335396,
48 | "tibia": -41.67638594657396,
49 | },
50 | 2: {
51 | "name": "left-front",
52 | "id": 2,
53 | "coxia": -3.1127758531426934,
54 | "femur": 64.38109364320302,
55 | "tibia": -41.751719577946915,
56 | },
57 | 3: {
58 | "name": "left-middle",
59 | "id": 3,
60 | "coxia": -14.447799823858816,
61 | "femur": 64.61701942138204,
62 | "tibia": -27.21279908137491,
63 | },
64 | 4: {
65 | "name": "left-back",
66 | "id": 4,
67 | "coxia": -27.925865837440085,
68 | "femur": 57.5357711909659,
69 | "tibia": -15.824751016445546,
70 | },
71 | 5: {
72 | "name": "right-back",
73 | "id": 5,
74 | "coxia": -34.07683786865073,
75 | "femur": 40.018917104647784,
76 | "tibia": -36.78650126914302,
77 | },
78 | }
79 |
--------------------------------------------------------------------------------
/tests/ik_cases/case2.py:
--------------------------------------------------------------------------------
1 | description = "IK Random Pose #2"
2 |
3 | # ********************************
4 | # Dimensions
5 | # ********************************
6 |
7 | given_dimensions = {
8 | "front": 76,
9 | "side": 114,
10 | "middle": 125,
11 | "coxia": 63,
12 | "femur": 142,
13 | "tibia": 171,
14 | }
15 |
16 | # ********************************
17 | # IK Parameters
18 | # ********************************
19 |
20 | given_ik_parameters = {
21 | "hip_stance": 10.5,
22 | "leg_stance": 25.5,
23 | "percent_x": 0.3,
24 | "percent_y": 0.05,
25 | "percent_z": -0.15,
26 | "rot_x": -1,
27 | "rot_y": 12.5,
28 | "rot_z": -8.5,
29 | }
30 |
31 | # ********************************
32 | # Poses
33 | # ********************************
34 |
35 | correct_poses = {
36 | 0: {
37 | "name": "right-middle",
38 | "id": 0,
39 | "coxia": 13.43107675540267,
40 | "femur": 77.7924770301091,
41 | "tibia": -60.647267530564136,
42 | },
43 | 1: {
44 | "name": "right-front",
45 | "id": 1,
46 | "coxia": 14.431630572348844,
47 | "femur": 66.33077021197852,
48 | "tibia": -57.05016213919879,
49 | },
50 | 2: {
51 | "name": "left-front",
52 | "id": 2,
53 | "coxia": 30.081030614307394,
54 | "femur": 11.619722581700444,
55 | "tibia": -1.6253249676582442,
56 | },
57 | 3: {
58 | "name": "left-middle",
59 | "id": 3,
60 | "coxia": 14.685705676958776,
61 | "femur": 3.177447435672022,
62 | "tibia": 4.800985597502901,
63 | },
64 | 4: {
65 | "name": "left-back",
66 | "id": 4,
67 | "coxia": -0.9115332668632732,
68 | "femur": 9.309907080761477,
69 | "tibia": -4.315425166528982,
70 | },
71 | 5: {
72 | "name": "right-back",
73 | "id": 5,
74 | "coxia": 14.382064236242854,
75 | "femur": 59.28098836470138,
76 | "tibia": -49.19348454681213,
77 | },
78 | }
79 |
--------------------------------------------------------------------------------
/tests/ik_cases/case3.py:
--------------------------------------------------------------------------------
1 | description = "IK Pose where x, y translation, rot y and z are close to extreme"
2 |
3 | # ********************************
4 | # Dimensions
5 | # ********************************
6 |
7 | given_dimensions = {
8 | "front": 73,
9 | "side": 100,
10 | "middle": 130,
11 | "coxia": 75,
12 | "femur": 129,
13 | "tibia": 154,
14 | }
15 |
16 | # ********************************
17 | # IK Parameters
18 | # ********************************
19 |
20 | given_ik_parameters = {
21 | "hip_stance": 10.5,
22 | "leg_stance": 30,
23 | "percent_x": 0.7,
24 | "percent_y": -0.4,
25 | "percent_z": 0.2,
26 | "rot_x": 1.5,
27 | "rot_y": -16,
28 | "rot_z": -14.5,
29 | }
30 |
31 | # ********************************
32 | # Poses
33 | # ********************************
34 |
35 | correct_poses = {
36 | 0: {
37 | "name": "right-middle",
38 | "id": 0,
39 | "coxia": 55.56073526445866,
40 | "femur": -24.206649398630788,
41 | "tibia": -8.608209643253758,
42 | },
43 | 1: {
44 | "name": "right-front",
45 | "id": 1,
46 | "coxia": 51.072817817160114,
47 | "femur": -5.7010123660724545,
48 | "tibia": -7.5181271777452565,
49 | },
50 | 2: {
51 | "name": "left-front",
52 | "id": 2,
53 | "coxia": 33.84438606600443,
54 | "femur": 30.76781937225195,
55 | "tibia": 16.92773639721497,
56 | },
57 | 3: {
58 | "name": "left-middle",
59 | "id": 3,
60 | "coxia": 13.117976527545807,
61 | "femur": 48.11622597324919,
62 | "tibia": -0.4754969993002618,
63 | },
64 | 4: {
65 | "name": "left-back",
66 | "id": 4,
67 | "coxia": -8.445805980297905,
68 | "femur": 53.09741126074167,
69 | "tibia": -21.001329834229722,
70 | },
71 | 5: {
72 | "name": "right-back",
73 | "id": 5,
74 | "coxia": 26.002763598408308,
75 | "femur": -17.792174423794933,
76 | "tibia": -25.026074825755416,
77 | },
78 | }
79 |
--------------------------------------------------------------------------------
/tests/test_ik.py:
--------------------------------------------------------------------------------
1 | from copy import deepcopy
2 | from hexapod.const import BASE_DIMENSIONS
3 | from hexapod.models import VirtualHexapod
4 | from hexapod.points import Vector
5 | from hexapod.ik_solver import ik_solver, ik_solver2
6 | from hexapod.ik_solver.shared import update_hexapod_points
7 |
8 | from tests.ik_cases import case1, case2, case3
9 | from tests.helpers import assert_poses_equal, assert_two_hexapods_equal
10 |
11 | CASES = [case1, case2, case3]
12 |
13 |
14 | def assert_ik_solver(ik_function, case):
15 | hexapod = VirtualHexapod(case.given_dimensions)
16 | result_poses, _ = ik_function(hexapod, case.given_ik_parameters)
17 | assert_poses_equal(result_poses, case.correct_poses, case.description)
18 |
19 |
20 | def assert_ik_points(case, assume_ground_targets):
21 | hexapod = VirtualHexapod(case.given_dimensions)
22 | hexapod_ik = deepcopy(hexapod)
23 | hexapod_k = deepcopy(hexapod)
24 |
25 | poses, _ = ik_solver2.inverse_kinematics_update(hexapod, case.given_ik_parameters)
26 |
27 | hexapod_ik.update(poses, assume_ground_targets)
28 | hexapod_k.update(case.correct_poses, assume_ground_targets)
29 |
30 | assert_two_hexapods_equal(hexapod_ik, hexapod_k, case.description)
31 |
32 |
33 | def test_sample_ik():
34 | for case in CASES:
35 | assert_ik_solver(ik_solver2.inverse_kinematics_update, case)
36 | assert_ik_solver(ik_solver.inverse_kinematics_update, case)
37 | assert_ik_solver(ik_solver2.inverse_kinematics_update, case)
38 | assert_ik_solver(ik_solver.inverse_kinematics_update, case)
39 |
40 |
41 | def test_points_ik2_assume_ground_targets():
42 | for case in CASES:
43 | assert_ik_points(case, True)
44 |
45 |
46 | def test_points_ik2_dont_assume_ground_targets():
47 | for case in CASES:
48 | assert_ik_points(case, False)
49 |
50 |
51 | def test_shared_set_points():
52 | points = [
53 | Vector(1, 2, 3, "a"),
54 | Vector(1, 2, 3, "b"),
55 | Vector(1, 2, 3, "c"),
56 | Vector(1, 2, 3, "d"),
57 | ]
58 |
59 | vh = VirtualHexapod(BASE_DIMENSIONS)
60 | update_hexapod_points(vh, 1, points)
61 | for leg_point, point in zip(vh.legs[1].all_points, points):
62 | assert leg_point is point
63 |
--------------------------------------------------------------------------------
/pages/helpers.py:
--------------------------------------------------------------------------------
1 | from copy import deepcopy
2 | import json
3 | import dash_core_components as dcc
4 | from hexapod.const import (
5 | BASE_PLOTTER,
6 | BASE_POSE,
7 | BASE_IK_PARAMS,
8 | BASE_DIMENSIONS,
9 | NAMES_LEG,
10 | )
11 |
12 | NEW_POSES = deepcopy(BASE_POSE)
13 | POSES_MSG_HEADER = """
14 | +----------------+------------+------------+------------+
15 | | leg name | coxia | femur | tibia |
16 | +----------------+------------+------------+------------+"""
17 | POSES_MSG_LAST_ROW = "\n+----------------+------------+------------+------------+"
18 |
19 |
20 | def make_pose(alpha, beta, gamma, poses=NEW_POSES):
21 |
22 | for k in poses.keys():
23 | poses[k] = {
24 | "id": k,
25 | "name": NAMES_LEG[k],
26 | "coxia": alpha,
27 | "femur": beta,
28 | "tibia": gamma,
29 | }
30 | return poses
31 |
32 |
33 | def change_camera_view(figure, relayout_data):
34 | if relayout_data and "scene.camera" in relayout_data:
35 | camera = relayout_data["scene.camera"]
36 | BASE_PLOTTER.change_camera_view(figure, camera)
37 |
38 | return figure
39 |
40 |
41 | def load_params(params_json, params_type):
42 | try:
43 | params = json.loads(params_json)
44 | except Exception as e:
45 | print(f"Error loading json of type {params_type}. {e} | {params_json}")
46 |
47 | if params_type == "dims":
48 | return BASE_DIMENSIONS
49 | if params_type == "pose":
50 | return BASE_POSE
51 | if params_type == "ik":
52 | return BASE_IK_PARAMS
53 |
54 | raise Exception(
55 | f'params_type must be "dims", "pose" or "ik", not {params_type}'
56 | ) from e
57 |
58 | return params
59 |
60 |
61 | def make_monospace(text):
62 | return dcc.Markdown(f" ```{text}")
63 |
64 |
65 | def make_poses_message(poses):
66 | message = POSES_MSG_HEADER
67 |
68 | for pose in poses.values():
69 | name = pose["name"]
70 | coxia = pose["coxia"]
71 | femur = pose["femur"]
72 | tibia = pose["tibia"]
73 | row = f"\n| {name:14} | {coxia:<+10.2f} | {femur:<+10.2f} | {tibia:<+10.2f} |"
74 | message += row
75 |
76 | return make_monospace(message + POSES_MSG_LAST_ROW)
77 |
78 |
79 | def make_alert_message(alert):
80 | return make_monospace(f"❗❗❗ALERT❗❗❗\n⚠️ {alert} 🔴")
81 |
--------------------------------------------------------------------------------
/hexapod/ground_contact_solver/shared.py:
--------------------------------------------------------------------------------
1 | from math import isclose
2 | from hexapod.points import (
3 | Vector,
4 | dot,
5 | cross,
6 | vector_from_to,
7 | )
8 |
9 | # Prioritize legs that are not adjacent to each other
10 | SOME_LEG_TRIOS = [
11 | (0, 1, 3),
12 | (0, 1, 4),
13 | (0, 2, 3),
14 | (0, 2, 4),
15 | (0, 2, 5),
16 | (0, 3, 4),
17 | (0, 3, 5),
18 | (1, 2, 4),
19 | (1, 2, 5),
20 | (1, 3, 4),
21 | (1, 3, 5),
22 | (1, 4, 5),
23 | (2, 3, 5),
24 | (2, 4, 5),
25 | ]
26 |
27 | ADJACENT_LEG_TRIOS = [
28 | (0, 1, 2),
29 | (1, 2, 3),
30 | (2, 3, 4),
31 | (3, 4, 5),
32 | (0, 4, 5),
33 | (0, 1, 5),
34 | ]
35 |
36 | LEG_TRIOS = SOME_LEG_TRIOS + ADJACENT_LEG_TRIOS
37 |
38 |
39 | # math.stackexchange.com/questions/544946/
40 | # determine-if-projection-of-3d-point-onto-plane-is-within-a-triangle
41 | # gamedev.stackexchange.com/questions/23743/
42 | # whats-the-most-efficient-way-to-find-barycentric-coordinates
43 | # en.wikipedia.org/wiki/Barycentric_coordinate_system
44 | def is_stable(p1, p2, p3, tol=0.001):
45 | """
46 | Determines stability of the pose.
47 | Determine if projection of 3D point p
48 | onto the plane defined by p1, p2, p3
49 | is within a triangle defined by p1, p2, p3.
50 | """
51 | p = Vector(0, 0, 0)
52 | u = vector_from_to(p1, p2)
53 | v = vector_from_to(p1, p3)
54 | n = cross(u, v)
55 | w = vector_from_to(p1, p)
56 | n2 = dot(n, n)
57 | beta = dot(cross(u, w), n) / n2
58 | gamma = dot(cross(w, v), n) / n2
59 | alpha = 1 - gamma - beta
60 | # then coordinate of the projected point (p_) of point p
61 | # p_ = alpha * p1 + beta * p2 + gamma * p3
62 | min_val = -tol
63 | max_val = 1 + tol
64 | cond1 = min_val <= alpha <= max_val
65 | cond2 = min_val <= beta <= max_val
66 | cond3 = min_val <= gamma <= max_val
67 | return cond1 and cond2 and cond3
68 |
69 |
70 | def is_lower(point, height, n, tol=1):
71 | _height = -dot(n, point)
72 | return _height > height + tol
73 |
74 |
75 | def find_legs_on_ground(legs, n, height, tol=1):
76 | legs_on_ground = []
77 | for leg in legs:
78 | for point in reversed(leg.all_points[1:]):
79 | _height = -dot(n, point)
80 | if isclose(height, _height, abs_tol=tol):
81 | legs_on_ground.append(leg)
82 | break
83 |
84 | return legs_on_ground
85 |
--------------------------------------------------------------------------------
/widgets/pose_control/joint_widget_maker.py:
--------------------------------------------------------------------------------
1 | # Used to build the widgets for changing the joint angles
2 | import dash_core_components as dcc
3 | import dash_daq
4 | from hexapod.const import NAMES_JOINT, NAMES_LEG
5 | from settings import (
6 | ALPHA_MAX_ANGLE,
7 | BETA_MAX_ANGLE,
8 | GAMMA_MAX_ANGLE,
9 | UPDATE_MODE,
10 | )
11 | from style_settings import (
12 | NUMBER_INPUT_STYLE,
13 | SLIDER_THEME,
14 | SLIDER_HANDLE_COLOR,
15 | SLIDER_COLOR,
16 | )
17 |
18 | max_angles = {
19 | "coxia": ALPHA_MAX_ANGLE,
20 | "femur": BETA_MAX_ANGLE,
21 | "tibia": GAMMA_MAX_ANGLE,
22 | }
23 |
24 |
25 | # widget id format:
26 | # 'widget' + '-' + leg_x + '-' + leg_y + '-' leg_joint
27 | # leg_x = ['left', 'right']
28 | # leg_y = ['front', 'middle', 'back']
29 | # leg_joint = ['coxia', 'femur', 'tibia']
30 | # input dictionary structure
31 | # all_joint_widgets['left-front']['coxia'] = joint_widget
32 | # all_joint_widgets['right-middle']['femur'] = joint_widget
33 | def make_all_joint_widgets(joint_input_function):
34 | all_joint_widgets = {}
35 |
36 | for leg_name in NAMES_LEG:
37 | leg_joint_widget = {}
38 |
39 | for joint_name in NAMES_JOINT:
40 | widget_id = "widget-{}-{}".format(leg_name, joint_name)
41 | leg_joint_widget[joint_name] = joint_input_function(
42 | widget_id, max_angles[joint_name]
43 | )
44 |
45 | all_joint_widgets[leg_name] = leg_joint_widget
46 |
47 | return all_joint_widgets
48 |
49 |
50 | def make_daq_slider(widget_id, max_angle):
51 | _, _, _, angle = widget_id.split("-")
52 |
53 | handle_style = {
54 | "showCurrentValue": True,
55 | "color": SLIDER_HANDLE_COLOR,
56 | "label": angle,
57 | }
58 |
59 | return dash_daq.Slider( # pylint: disable=not-callable
60 | id=widget_id,
61 | min=-max_angle,
62 | max=max_angle,
63 | value=1.5,
64 | step=1.5,
65 | size=80,
66 | vertical=True,
67 | updatemode=UPDATE_MODE,
68 | handleLabel=handle_style,
69 | color={"default": SLIDER_COLOR},
70 | theme=SLIDER_THEME,
71 | )
72 |
73 |
74 | def make_slider(widget_id, max_angle):
75 | slider_marks = {tick: str(tick) for tick in [-45, 0, 45]}
76 | return dcc.Slider(
77 | id=widget_id, min=-max_angle, max=max_angle, marks=slider_marks, value=0, step=5
78 | )
79 |
80 |
81 | def make_number_widget(widget_id, max_angle):
82 | return dcc.Input(
83 | id=widget_id,
84 | type="number",
85 | value=0.0,
86 | min=-max_angle,
87 | max=max_angle,
88 | style=NUMBER_INPUT_STYLE,
89 | )
90 |
--------------------------------------------------------------------------------
/pages/page_inverse.py:
--------------------------------------------------------------------------------
1 | import json
2 | from dash.dependencies import Output
3 | from app import app
4 | from settings import RECOMPUTE_HEXAPOD
5 | from hexapod.models import VirtualHexapod
6 | from hexapod.const import BASE_PLOTTER
7 | from hexapod.ik_solver.ik_solver2 import inverse_kinematics_update
8 | from hexapod.ik_solver.recompute_hexapod import recompute_hexapod
9 | from widgets.ik_ui import IK_WIDGETS_SECTION, IK_CALLBACK_INPUTS
10 | from pages import helpers, shared
11 |
12 |
13 | # ......................
14 | # Page layout
15 | # ......................
16 |
17 | GRAPH_ID = "graph-inverse"
18 | MESSAGE_SECTION_ID = "message-inverse"
19 | PARAMETERS_SECTION_ID = "parameters-inverse"
20 |
21 | sidebar = shared.make_standard_page_sidebar(
22 | MESSAGE_SECTION_ID, PARAMETERS_SECTION_ID, IK_WIDGETS_SECTION
23 | )
24 |
25 | layout = shared.make_standard_page_layout(GRAPH_ID, sidebar)
26 |
27 |
28 | # ......................
29 | # Update page
30 | # ......................
31 |
32 | outputs, inputs, states = shared.make_standard_page_callback_params(
33 | GRAPH_ID, PARAMETERS_SECTION_ID, MESSAGE_SECTION_ID
34 | )
35 |
36 |
37 | @app.callback(outputs, inputs, states)
38 | def update_inverse_page(dimensions_json, ik_parameters_json, relayout_data, figure):
39 |
40 | dimensions = helpers.load_params(dimensions_json, "dims")
41 | ik_parameters = helpers.load_params(ik_parameters_json, "ik")
42 | hexapod = VirtualHexapod(dimensions)
43 |
44 | try:
45 | poses, hexapod = inverse_kinematics_update(hexapod, ik_parameters)
46 | except Exception as alert:
47 | return figure, helpers.make_alert_message(alert)
48 |
49 | if RECOMPUTE_HEXAPOD:
50 | try:
51 | hexapod = recompute_hexapod(dimensions, ik_parameters, poses)
52 | except Exception as alert:
53 | return figure, helpers.make_alert_message(alert)
54 |
55 | BASE_PLOTTER.update(figure, hexapod)
56 | helpers.change_camera_view(figure, relayout_data)
57 | return figure, helpers.make_poses_message(poses)
58 |
59 |
60 | # ......................
61 | # Update parameters
62 | # ......................
63 |
64 | output_parameter = Output(PARAMETERS_SECTION_ID, "children")
65 | input_parameters = IK_CALLBACK_INPUTS
66 |
67 |
68 | @app.callback(output_parameter, input_parameters)
69 | def update_ik_parameters(
70 | hip_stance, leg_stance, percent_x, percent_y, percent_z, rot_x, rot_y, rot_z
71 | ):
72 |
73 | return json.dumps(
74 | {
75 | "hip_stance": hip_stance or 0,
76 | "leg_stance": leg_stance or 0,
77 | "percent_x": percent_x or 0,
78 | "percent_y": percent_y or 0,
79 | "percent_z": percent_z or 0,
80 | "rot_x": rot_x or 0,
81 | "rot_y": rot_y or 0,
82 | "rot_z": rot_z or 0,
83 | }
84 | )
85 |
--------------------------------------------------------------------------------
/index.py:
--------------------------------------------------------------------------------
1 | import dash_core_components as dcc
2 | import dash_html_components as html
3 | from dash.dependencies import Input, Output
4 | from texts import (
5 | URL_KOFI,
6 | URL_REPO,
7 | KINEMATICS_PAGE_PATH,
8 | IK_PAGE_PATH,
9 | PATTERNS_PAGE_PATH,
10 | ROOT_PATH,
11 | )
12 | from settings import DEBUG_MODE
13 | from style_settings import GLOBAL_PAGE_STYLE
14 | from app import app
15 | from pages import page_inverse, page_kinematics, page_patterns, page_landing
16 |
17 | server = app.server
18 |
19 | # ....................
20 | # Navigation partials
21 | # ....................
22 | icon_link_style = {"margin": "0 0 0 0.5em"}
23 |
24 | div_header = html.Div(
25 | [
26 | html.A(html.H6("👾"), href=URL_REPO, target="_blank", style=icon_link_style),
27 | html.A(html.H6("☕"), href=URL_KOFI, target="_blank", style=icon_link_style),
28 | dcc.Link(html.H6("●"), href=PATTERNS_PAGE_PATH, style=icon_link_style),
29 | dcc.Link(html.H6("●"), href=IK_PAGE_PATH, style=icon_link_style),
30 | dcc.Link(html.H6("●"), href=KINEMATICS_PAGE_PATH, style=icon_link_style),
31 | dcc.Link(html.H6("●"), href=ROOT_PATH, style=icon_link_style),
32 | ],
33 | style={"display": "flex", "flex-direction": "row"},
34 | )
35 |
36 | div_footer = html.Div(
37 | [
38 | html.A("👾 Source Code", href=URL_REPO, target="_blank"),
39 | html.Br(),
40 | html.A("☕ Buy Mithi coffee", href=URL_KOFI, target="_blank"),
41 | html.Br(),
42 | dcc.Link("● Leg Patterns", href=PATTERNS_PAGE_PATH),
43 | html.Br(),
44 | dcc.Link("● Inverse Kinematics", href=IK_PAGE_PATH),
45 | html.Br(),
46 | dcc.Link("● Kinematics", href=KINEMATICS_PAGE_PATH),
47 | html.Br(),
48 | dcc.Link("● Root", href=ROOT_PATH),
49 | html.Br(),
50 | ],
51 | )
52 |
53 | # ....................
54 | # Page layout
55 | # ....................
56 | app.layout = html.Div(
57 | [
58 | div_header,
59 | dcc.Location(id="url", refresh=False),
60 | html.Div(id="page-content"),
61 | div_footer,
62 | ],
63 | style=GLOBAL_PAGE_STYLE,
64 | )
65 |
66 |
67 | # ....................
68 | # URL redirection
69 | # ....................
70 | PAGES = {
71 | IK_PAGE_PATH: page_inverse.layout,
72 | KINEMATICS_PAGE_PATH: page_kinematics.layout,
73 | PATTERNS_PAGE_PATH: page_patterns.layout,
74 | ROOT_PATH: page_landing.layout,
75 | }
76 |
77 |
78 | # ....................
79 | # Callback to display page given URL
80 | # ....................
81 | @app.callback(Output("page-content", "children"), [Input("url", "pathname")])
82 | def display_page(pathname):
83 | try:
84 | return PAGES[pathname]
85 | except KeyError:
86 | return PAGES[ROOT_PATH]
87 |
88 |
89 | # ....................
90 | # Run server
91 | # ....................
92 | if __name__ == "__main__":
93 | app.run_server(
94 | debug=DEBUG_MODE, dev_tools_ui=DEBUG_MODE, dev_tools_props_check=DEBUG_MODE
95 | )
96 |
--------------------------------------------------------------------------------
/pages/shared.py:
--------------------------------------------------------------------------------
1 | import json
2 | import dash_core_components as dcc
3 | from dash.dependencies import Output, Input, State
4 | import dash_html_components as html
5 | from app import app
6 | from settings import (
7 | UI_SIDEBAR_WIDTH,
8 | UI_GRAPH_WIDTH,
9 | UI_GRAPH_HEIGHT,
10 | )
11 | from widgets.dimensions_ui import DIMENSION_CALLBACK_INPUTS, DIMENSIONS_WIDGETS_SECTION
12 | from hexapod.const import BASE_FIGURE
13 |
14 |
15 | # ......................
16 | # Update hexapod dimensions callback
17 | # ......................
18 |
19 | DIMENSIONS_HIDDEN_SECTION_ID = "hexapod-dimensions-values"
20 | DIMENSIONS_HIDDEN_SECTION = html.Div(
21 | id=DIMENSIONS_HIDDEN_SECTION_ID, style={"display": "none"}
22 | )
23 | DIMS_JSON_CALLBACK_INPUT = Input(DIMENSIONS_HIDDEN_SECTION_ID, "children")
24 | DIMS_JSON_CALLBACK_OUTPUT = Output(DIMENSIONS_HIDDEN_SECTION_ID, "children")
25 |
26 |
27 | @app.callback(DIMS_JSON_CALLBACK_OUTPUT, DIMENSION_CALLBACK_INPUTS)
28 | def update_dimensions(front, side, middle, coxia, femur, tibia):
29 | dimensions = {
30 | "front": front or 0,
31 | "side": side or 0,
32 | "middle": middle or 0,
33 | "coxia": coxia or 0,
34 | "femur": femur or 0,
35 | "tibia": tibia or 0,
36 | }
37 | return json.dumps(dimensions)
38 |
39 |
40 | # ......................
41 | # Make uniform layout
42 | # Graph on the right, controls on the left
43 | # ......................
44 |
45 |
46 | def make_standard_page_layout(graph_id, sidebar_sections):
47 | sidebar = html.Div(sidebar_sections, style={"width": UI_SIDEBAR_WIDTH})
48 | graph = dcc.Graph(
49 | id=graph_id,
50 | figure=BASE_FIGURE,
51 | style={"width": UI_GRAPH_WIDTH, "height": UI_GRAPH_HEIGHT},
52 | )
53 |
54 | layout = html.Div([sidebar, graph], style={"display": "flex"})
55 | return layout
56 |
57 |
58 | # ......................
59 | # Make standard sidebar
60 | # ......................
61 |
62 |
63 | def make_standard_page_sidebar(
64 | message_section_id, params_hidden_section_id, params_widgets_section
65 | ):
66 | params_hidden_section = html.Div(
67 | id=params_hidden_section_id, style={"display": "none"}
68 | )
69 | message_section = html.Div(id=message_section_id)
70 |
71 | return [
72 | DIMENSIONS_WIDGETS_SECTION,
73 | params_widgets_section,
74 | message_section,
75 | DIMENSIONS_HIDDEN_SECTION,
76 | params_hidden_section,
77 | ]
78 |
79 |
80 | # ......................
81 | # Make outputs, inputs, and states for page update callbacks
82 | # .....................
83 |
84 |
85 | def make_standard_page_callback_params(graph_id, params_section_id, message_section_id):
86 |
87 | message_callback_output = Output(message_section_id, "children")
88 | params_json_callback_input = Input(params_section_id, "children")
89 | outputs = [Output(graph_id, "figure"), message_callback_output]
90 | inputs = [DIMS_JSON_CALLBACK_INPUT, params_json_callback_input]
91 | states = [State(graph_id, "relayoutData"), State(graph_id, "figure")]
92 | return outputs, inputs, states
93 |
--------------------------------------------------------------------------------
/pages/page_kinematics.py:
--------------------------------------------------------------------------------
1 | import json
2 | from dash.dependencies import Output
3 | from app import app
4 | from settings import WHICH_POSE_CONTROL_UI
5 | from hexapod.models import VirtualHexapod
6 | from hexapod.const import BASE_PLOTTER
7 | from widgets.pose_control.components import KINEMATICS_CALLBACK_INPUTS
8 | from pages import helpers, shared
9 |
10 | if WHICH_POSE_CONTROL_UI == 1:
11 | from widgets.pose_control.generic_daq_slider_ui import KINEMATICS_WIDGETS_SECTION
12 | elif WHICH_POSE_CONTROL_UI == 2:
13 | from widgets.pose_control.generic_slider_ui import KINEMATICS_WIDGETS_SECTION
14 | else:
15 | from widgets.pose_control.generic_input_ui import KINEMATICS_WIDGETS_SECTION
16 |
17 | # ......................
18 | # Page layout
19 | # ......................
20 |
21 | GRAPH_ID = "graph-kinematics"
22 | MESSAGE_SECTION_ID = "message-kinematics"
23 | PARAMETERS_SECTION_ID = "parameters-kinematics"
24 |
25 | sidebar = shared.make_standard_page_sidebar(
26 | MESSAGE_SECTION_ID, PARAMETERS_SECTION_ID, KINEMATICS_WIDGETS_SECTION
27 | )
28 |
29 | layout = shared.make_standard_page_layout(GRAPH_ID, sidebar)
30 |
31 |
32 | # ......................
33 | # Update page
34 | # ......................
35 |
36 | outputs, inputs, states = shared.make_standard_page_callback_params(
37 | GRAPH_ID, PARAMETERS_SECTION_ID, MESSAGE_SECTION_ID
38 | )
39 |
40 |
41 | @app.callback(outputs, inputs, states)
42 | def update_kinematics_page(dimensions_json, poses_json, relayout_data, figure):
43 |
44 | dimensions = helpers.load_params(dimensions_json, "dims")
45 | poses = helpers.load_params(poses_json, "pose")
46 | hexapod = VirtualHexapod(dimensions)
47 |
48 | try:
49 | hexapod.update(poses, assume_ground_targets=False)
50 | except Exception as alert:
51 | return figure, helpers.make_alert_message(alert)
52 |
53 | BASE_PLOTTER.update(figure, hexapod)
54 | helpers.change_camera_view(figure, relayout_data)
55 | return figure, ""
56 |
57 |
58 | # ......................
59 | # Update parameters
60 | # ......................
61 |
62 |
63 | output_parameter = Output(PARAMETERS_SECTION_ID, "children")
64 | input_parameters = KINEMATICS_CALLBACK_INPUTS
65 |
66 | # fmt: off
67 |
68 |
69 | @app.callback(output_parameter, input_parameters)
70 | def update_poses(
71 | rmc, rmf, rmt,
72 | rfc, rff, rft,
73 | lfc, lff, lft,
74 | lmc, lmf, lmt,
75 | lbc, lbf, lbt,
76 | rbc, rbf, rbt,
77 | ):
78 |
79 | return json.dumps({
80 | 0: {"coxia": rmc or 0, "femur": rmf or 0, "tibia": rmt or 0, "name": "right-middle", "id": 0},
81 | 1: {"coxia": rfc or 0, "femur": rff or 0, "tibia": rft or 0, "name": "right-front", "id": 1},
82 | 2: {"coxia": lfc or 0, "femur": lff or 0, "tibia": lft or 0, "name": "left-front", "id": 2},
83 | 3: {"coxia": lmc or 0, "femur": lmf or 0, "tibia": lmt or 0, "name": "left-middle", "id": 3},
84 | 4: {"coxia": lbc or 0, "femur": lbf or 0, "tibia": lbt or 0, "name": "left-back", "id": 4},
85 | 5: {"coxia": rbc or 0, "femur": rbf or 0, "tibia": rbt or 0, "name": "right-back", "id": 5},
86 | })
87 |
88 | # fmt: on
89 |
--------------------------------------------------------------------------------
/style_settings.py:
--------------------------------------------------------------------------------
1 | DARKMODE = True
2 |
3 | DARK_CSS_PATH = "https://mithi.github.io/hexapod-robot-simulator/dark.css"
4 | LIGHT_CSS_PATH = "https://mithi.github.io/hexapod-robot-simulator/light.css"
5 |
6 | EXTERNAL_STYLESHEETS = [DARK_CSS_PATH]
7 | if not DARKMODE:
8 | EXTERNAL_STYLESHEETS = [LIGHT_CSS_PATH]
9 |
10 |
11 | # ***************************************
12 | # GLOBAL PAGE STYLE
13 | # ***************************************
14 |
15 | DARK_BG_COLOR = "#222f3e"
16 | DARK_FONT_COLOR = "#32ff7e"
17 |
18 | GLOBAL_PAGE_STYLE = {
19 | "background": DARK_BG_COLOR,
20 | "color": DARK_FONT_COLOR,
21 | "padding": "0em",
22 | }
23 |
24 | if not DARKMODE:
25 | GLOBAL_PAGE_STYLE = {"background": "#ffffff", "color": "#2c3e50", "padding": "0em"}
26 |
27 |
28 | # ***************************************
29 | # NUMBER FIELD INPUT WIDGET
30 | # ***************************************
31 |
32 | NUMBER_INPUT_STYLE = {
33 | "marginRight": "5%",
34 | "width": "95%",
35 | "marginBottom": "5%",
36 | "borderRadius": "10px",
37 | "border": "solid 1px",
38 | "fontFamily": "Courier New",
39 | }
40 |
41 | if DARKMODE:
42 | NUMBER_INPUT_STYLE["backgroundColor"] = "#2c3e50"
43 | NUMBER_INPUT_STYLE["color"] = "#2ecc71"
44 | NUMBER_INPUT_STYLE["borderColor"] = "#2980b9"
45 |
46 |
47 | # ***************************************
48 | # DAQ SLIDER INPUT WIDGET
49 | # ***************************************
50 |
51 | IK_SLIDER_SIZE = 100
52 |
53 | SLIDER_THEME = {
54 | "dark": DARKMODE,
55 | "detail": "#ffffff",
56 | "primary": "#ffffff",
57 | "secondary": "#ffffff",
58 | }
59 |
60 | SLIDER_HANDLE_COLOR = "#2ecc71"
61 | SLIDER_COLOR = "#FC427B"
62 |
63 | if not DARKMODE:
64 | SLIDER_HANDLE_COLOR = "#2c3e50"
65 | SLIDER_COLOR = "#8e44ad"
66 |
67 |
68 | # ***************************************
69 | # HEXAPOD GRAPH
70 | # ***************************************
71 |
72 | BODY_MESH_COLOR = "#ff6348"
73 | BODY_MESH_OPACITY = 0.3
74 | BODY_COLOR = "#FC427B"
75 | BODY_OUTLINE_WIDTH = 12
76 | COG_COLOR = "#32ff7e"
77 | COG_SIZE = 14
78 | HEAD_SIZE = 14
79 | LEG_COLOR = "#EE5A24" # "#b71540"
80 | LEG_OUTLINE_WIDTH = 10
81 | SUPPORT_POLYGON_MESH_COLOR = "#3c6382"
82 | SUPPORT_POLYGON_MESH_OPACITY = 0.2
83 | LEGENDS_BG_COLOR = "rgba(44, 62, 80, 0.8)"
84 | AXIS_ZERO_LINE_COLOR = "#079992"
85 | PAPER_BG_COLOR = "#222f3e"
86 | GROUND_COLOR = "#0a3d62"
87 | LEGEND_FONT_COLOR = "#2ecc71"
88 |
89 | if not DARKMODE:
90 | BODY_MESH_COLOR = "#8e44ad"
91 | BODY_MESH_OPACITY = 0.9
92 | BODY_COLOR = "#8e44ad"
93 | BODY_OUTLINE_WIDTH = 10
94 | COG_COLOR = "#2c3e50"
95 | COG_SIZE = 15
96 | HEAD_COLOR = "#8e44ad"
97 | HEAD_SIZE = 12
98 | LEG_COLOR = "#2c3e50"
99 | LEG_OUTLINE_WIDTH = 10
100 | SUPPORT_POLYGON_MESH_COLOR = "#ffa801"
101 | SUPPORT_POLYGON_MESH_OPACITY = 0.3
102 | LEGENDS_BG_COLOR = "rgba(255, 255, 255, 0.5)"
103 | AXIS_ZERO_LINE_COLOR = "#ffa801"
104 | PAPER_BG_COLOR = "white"
105 | GROUND_COLOR = "rgb(240, 240, 240)"
106 | LEGEND_FONT_COLOR = "#34495e"
107 |
--------------------------------------------------------------------------------
/tests/pattern_cases/case1.py:
--------------------------------------------------------------------------------
1 | from hexapod.points import Vector
2 |
3 | description = "Patterns Random Pose #1"
4 | alpha = 42
5 | beta = 66
6 | gamma = -34.5
7 |
8 | # ********************************
9 | # Dimensions
10 | # ********************************
11 |
12 | given_dimensions = {
13 | "front": 76,
14 | "side": 92,
15 | "middle": 123,
16 | "coxia": 58,
17 | "femur": 177,
18 | "tibia": 151,
19 | }
20 |
21 | # ********************************
22 | # Correct Body Vectors
23 | # ********************************
24 |
25 | correct_body_points = [
26 | Vector(x=+123.00, y=+0.00, z=+0.00, name="right-middle"),
27 | Vector(x=+76.00, y=+92.00, z=+0.00, name="right-front"),
28 | Vector(x=-76.00, y=+92.00, z=+0.00, name="left-front"),
29 | Vector(x=-123.00, y=+0.00, z=+0.00, name="left-middle"),
30 | Vector(x=-76.00, y=-92.00, z=+0.00, name="left-back"),
31 | Vector(x=+76.00, y=-92.00, z=+0.00, name="right-back"),
32 | Vector(x=+0.00, y=+0.00, z=+0.00, name="center-of-gravity"),
33 | Vector(x=+0.00, y=+92.00, z=+0.00, name="head"),
34 | ]
35 |
36 |
37 | # ********************************
38 | # Correct Leg Vectors
39 | # ********************************
40 |
41 | leg0_points = [
42 | Vector(x=+123.00, y=+0.00, z=+0.00, name="right-middle-body-contact"),
43 | Vector(x=+166.10, y=+38.81, z=+0.00, name="right-middle-coxia"),
44 | Vector(x=+219.60, y=+86.98, z=+161.70, name="right-middle-femur"),
45 | Vector(x=+278.24, y=+139.77, z=+32.95, name="right-middle-tibia"),
46 | ]
47 |
48 | leg1_points = [
49 | Vector(x=+76.00, y=+92.00, z=+0.00, name="right-front-body-contact"),
50 | Vector(x=+79.04, y=+149.92, z=+0.00, name="right-front-coxia"),
51 | Vector(x=+82.80, y=+221.81, z=+161.70, name="right-front-femur"),
52 | Vector(x=+86.93, y=+300.60, z=+32.95, name="right-front-tibia"),
53 | ]
54 |
55 | leg2_points = [
56 | Vector(x=-76.00, y=+92.00, z=+0.00, name="left-front-body-contact"),
57 | Vector(x=-133.92, y=+95.04, z=+0.00, name="left-front-coxia"),
58 | Vector(x=-205.81, y=+98.80, z=+161.70, name="left-front-femur"),
59 | Vector(x=-284.60, y=+102.93, z=+32.95, name="left-front-tibia"),
60 | ]
61 |
62 | leg3_points = [
63 | Vector(x=-123.00, y=+0.00, z=+0.00, name="left-middle-body-contact"),
64 | Vector(x=-166.10, y=-38.81, z=+0.00, name="left-middle-coxia"),
65 | Vector(x=-219.60, y=-86.98, z=+161.70, name="left-middle-femur"),
66 | Vector(x=-278.24, y=-139.77, z=+32.95, name="left-middle-tibia"),
67 | ]
68 |
69 | leg4_points = [
70 | Vector(x=-76.00, y=-92.00, z=+0.00, name="left-back-body-contact"),
71 | Vector(x=-79.04, y=-149.92, z=+0.00, name="left-back-coxia"),
72 | Vector(x=-82.80, y=-221.81, z=+161.70, name="left-back-femur"),
73 | Vector(x=-86.93, y=-300.60, z=+32.95, name="left-back-tibia"),
74 | ]
75 |
76 | leg5_points = [
77 | Vector(x=+76.00, y=-92.00, z=+0.00, name="right-back-body-contact"),
78 | Vector(x=+133.92, y=-95.04, z=+0.00, name="right-back-coxia"),
79 | Vector(x=+205.81, y=-98.80, z=+161.70, name="right-back-femur"),
80 | Vector(x=+284.60, y=-102.93, z=+32.95, name="right-back-tibia"),
81 | ]
82 |
83 |
84 | correct_leg_points = [
85 | leg0_points,
86 | leg1_points,
87 | leg2_points,
88 | leg3_points,
89 | leg4_points,
90 | leg5_points,
91 | ]
92 |
--------------------------------------------------------------------------------
/tests/pattern_cases/case2.py:
--------------------------------------------------------------------------------
1 | from hexapod.points import Vector
2 |
3 | description = "Patterns Random Pose #2"
4 | alpha = -28.5
5 | beta = 72
6 | gamma = -54
7 |
8 | # ********************************
9 | # Dimensions
10 | # ********************************
11 |
12 | given_dimensions = {
13 | "front": 65,
14 | "side": 101,
15 | "middle": 122,
16 | "coxia": 83,
17 | "femur": 108,
18 | "tibia": 177,
19 | }
20 |
21 | # ********************************
22 | # Correct Body Vectors
23 | # ********************************
24 |
25 | correct_body_points = [
26 | Vector(x=+116.86, y=+35.03, z=+65.62, name="right-middle"),
27 | Vector(x=+33.27, y=+115.41, z=+65.62, name="right-front"),
28 | Vector(x=-91.26, y=+78.09, z=+65.62, name="left-front"),
29 | Vector(x=-116.86, y=-35.03, z=+65.62, name="left-middle"),
30 | Vector(x=-33.27, y=-115.41, z=+65.62, name="left-back"),
31 | Vector(x=+91.26, y=-78.09, z=+65.62, name="right-back"),
32 | Vector(x=+0.00, y=+0.00, z=+65.62, name="center-of-gravity"),
33 | Vector(x=-29.00, y=+96.75, z=+65.62, name="head"),
34 | ]
35 |
36 | # ********************************
37 | # Correct Leg Vectors
38 | # ********************************
39 |
40 | leg0_points = [
41 | Vector(x=+116.86, y=+35.03, z=+65.62, name="right-middle-body-contact"),
42 | Vector(x=+198.11, y=+18.03, z=+65.62, name="right-middle-coxia"),
43 | Vector(x=+230.77, y=+11.20, z=+168.34, name="right-middle-femur"),
44 | Vector(x=+284.31, y=+0.00, z=+0.00, name="right-middle-tibia"),
45 | ]
46 |
47 | leg1_points = [
48 | Vector(x=+33.27, y=+115.41, z=+65.62, name="right-front-body-contact"),
49 | Vector(x=+102.73, y=+160.84, z=+65.62, name="right-front-coxia"),
50 | Vector(x=+130.66, y=+179.11, z=+168.34, name="right-front-femur"),
51 | Vector(x=+176.44, y=+209.04, z=+0.00, name="right-front-tibia"),
52 | ]
53 |
54 | leg2_points = [
55 | Vector(x=-91.26, y=+78.09, z=+65.62, name="left-front-body-contact"),
56 | Vector(x=-136.69, y=+147.55, z=+65.62, name="left-front-coxia"),
57 | Vector(x=-154.96, y=+175.48, z=+168.34, name="left-front-femur"),
58 | Vector(x=-184.90, y=+221.26, z=+0.00, name="left-front-tibia"),
59 | ]
60 |
61 | leg3_points = [
62 | Vector(x=-116.86, y=-35.03, z=+65.62, name="left-middle-body-contact"),
63 | Vector(x=-198.11, y=-18.03, z=+65.62, name="left-middle-coxia"),
64 | Vector(x=-230.77, y=-11.20, z=+168.34, name="left-middle-femur"),
65 | Vector(x=-284.31, y=+0.00, z=+0.00, name="left-middle-tibia"),
66 | ]
67 |
68 | leg4_points = [
69 | Vector(x=-33.27, y=-115.41, z=+65.62, name="left-back-body-contact"),
70 | Vector(x=-102.73, y=-160.84, z=+65.62, name="left-back-coxia"),
71 | Vector(x=-130.66, y=-179.11, z=+168.34, name="left-back-femur"),
72 | Vector(x=-176.44, y=-209.04, z=+0.00, name="left-back-tibia"),
73 | ]
74 |
75 | leg5_points = [
76 | Vector(x=+91.26, y=-78.09, z=+65.62, name="right-back-body-contact"),
77 | Vector(x=+136.69, y=-147.55, z=+65.62, name="right-back-coxia"),
78 | Vector(x=+154.96, y=-175.48, z=+168.34, name="right-back-femur"),
79 | Vector(x=+184.90, y=-221.26, z=+0.00, name="right-back-tibia"),
80 | ]
81 |
82 | correct_leg_points = [
83 | leg0_points,
84 | leg1_points,
85 | leg2_points,
86 | leg3_points,
87 | leg4_points,
88 | leg5_points,
89 | ]
90 |
--------------------------------------------------------------------------------
/widgets/ik_ui.py:
--------------------------------------------------------------------------------
1 | # Widgets used to set the inverse kinematics parameters
2 | import dash_core_components as dcc
3 | import dash_html_components as html
4 | from dash.dependencies import Input
5 | import dash_daq
6 | from texts import IK_WIDGETS_HEADER
7 | from style_settings import (
8 | SLIDER_THEME,
9 | SLIDER_HANDLE_COLOR,
10 | SLIDER_COLOR,
11 | IK_SLIDER_SIZE,
12 | )
13 | from settings import (
14 | UPDATE_MODE,
15 | BODY_MAX_ANGLE,
16 | HIP_STANCE_MAX_ANGLE,
17 | LEG_STANCE_MAX_ANGLE,
18 | SLIDER_ANGLE_RESOLUTION,
19 | )
20 |
21 |
22 | def make_row(divs):
23 | widget_style = {"padding": "1.0em 0 0 4.0em"}
24 | row_style = {"display": "flex", "flex-direction": "row"}
25 | widgets = [html.Div(div, style=widget_style) for div in divs]
26 | return html.Div(widgets, style=row_style)
27 |
28 |
29 | def make_translate_slider(name, slider_label):
30 | handle_style = {
31 | "showCurrentValue": True,
32 | "color": SLIDER_HANDLE_COLOR,
33 | "label": slider_label,
34 | }
35 |
36 | return dash_daq.Slider( # pylint: disable=not-callable
37 | id=name,
38 | min=-1.0,
39 | max=1.0,
40 | value=0.05,
41 | step=0.05,
42 | vertical=True,
43 | size=IK_SLIDER_SIZE,
44 | updatemode=UPDATE_MODE,
45 | handleLabel=handle_style,
46 | color={"default": SLIDER_COLOR},
47 | theme=SLIDER_THEME,
48 | )
49 |
50 |
51 | def make_rotate_slider(name, slider_label, max_angle=BODY_MAX_ANGLE):
52 | handle_style = {
53 | "showCurrentValue": True,
54 | "color": SLIDER_HANDLE_COLOR,
55 | "label": slider_label,
56 | }
57 | return dash_daq.Slider( # pylint: disable=not-callable
58 | id=name,
59 | min=-max_angle,
60 | max=max_angle,
61 | value=1.5,
62 | step=SLIDER_ANGLE_RESOLUTION,
63 | vertical=True,
64 | size=IK_SLIDER_SIZE,
65 | updatemode=UPDATE_MODE,
66 | handleLabel=handle_style,
67 | color={"default": SLIDER_COLOR},
68 | theme=SLIDER_THEME,
69 | )
70 |
71 |
72 | # ................................
73 | # COMPONENTS
74 | # ................................
75 |
76 | HEADER = html.Label(dcc.Markdown(f"**{IK_WIDGETS_HEADER}**"))
77 | IK_WIDGETS_IDS = [
78 | "widget-start-hip-stance",
79 | "widget-start-leg-stance",
80 | "widget-percent-x",
81 | "widget-percent-y",
82 | "widget-percent-z",
83 | "widget-rot-x",
84 | "widget-rot-y",
85 | "widget-rot-z",
86 | ]
87 | IK_CALLBACK_INPUTS = [Input(input_id, "value") for input_id in IK_WIDGETS_IDS]
88 |
89 | w_hips = make_rotate_slider(
90 | IK_WIDGETS_IDS[0], "start\nhip.stance", HIP_STANCE_MAX_ANGLE
91 | )
92 | w_legs = make_rotate_slider(
93 | IK_WIDGETS_IDS[1], "start\nleg.stance", LEG_STANCE_MAX_ANGLE
94 | )
95 |
96 | w_tx = make_translate_slider(IK_WIDGETS_IDS[2], "percent.x")
97 | w_ty = make_translate_slider(IK_WIDGETS_IDS[3], "percent.y")
98 | w_tz = make_translate_slider(IK_WIDGETS_IDS[4], "percent.z")
99 |
100 | w_rx = make_rotate_slider(IK_WIDGETS_IDS[5], "rot.x")
101 | w_ry = make_rotate_slider(IK_WIDGETS_IDS[6], "rot.y")
102 | w_rz = make_rotate_slider(IK_WIDGETS_IDS[7], "rot.z")
103 |
104 | row1 = make_row([w_hips, w_tx, w_ty, w_tz])
105 | row2 = make_row([w_legs, w_rx, w_ry, w_rz])
106 |
107 | IK_WIDGETS_SECTION = html.Div([HEADER, row1, row2])
108 |
--------------------------------------------------------------------------------
/tests/kinematics_cases/case1.py:
--------------------------------------------------------------------------------
1 | from hexapod.points import Vector
2 |
3 | description = "Kinematics Random Pose #1"
4 |
5 | # ********************************
6 | # Dimensions
7 | # ********************************
8 |
9 | given_dimensions = {
10 | "front": 75,
11 | "side": 100,
12 | "middle": 125,
13 | "coxia": 50,
14 | "femur": 130,
15 | "tibia": 200,
16 | }
17 |
18 | # ********************************
19 | # Poses
20 | # ********************************
21 |
22 | given_poses = {
23 | 0: {"coxia": -40, "femur": 19, "tibia": 6, "name": "right-middle", "id": 0},
24 | 1: {"coxia": 33, "femur": 85, "tibia": -60, "name": "right-front", "id": 1},
25 | 2: {"coxia": -20, "femur": 90, "tibia": -13, "name": "left-front", "id": 2},
26 | 3: {"coxia": -12, "femur": -25, "tibia": 3, "name": "left-middle", "id": 3},
27 | 4: {"coxia": 0, "femur": 94, "tibia": -70, "name": "left-back", "id": 4},
28 | 5: {"coxia": -5, "femur": 17, "tibia": 2, "name": "right-back", "id": 5},
29 | }
30 |
31 |
32 | # ********************************
33 | # Correct Body Vectors
34 | # ********************************
35 |
36 | correct_body_points = [
37 | Vector(x=+97.74, y=+69.20, z=+123.97, name="right-middle"),
38 | Vector(x=-3.68, y=+111.78, z=+103.96, name="right-front"),
39 | Vector(x=-120.97, y=+28.74, z=+146.94, name="left-front"),
40 | Vector(x=-97.74, y=-69.20, z=+195.60, name="left-middle"),
41 | Vector(x=+3.68, y=-111.78, z=+215.60, name="left-back"),
42 | Vector(x=+120.97, y=-28.74, z=+172.63, name="right-back"),
43 | Vector(x=+0.00, y=+0.00, z=+159.78, name="center-of-gravity"),
44 | Vector(x=-62.33, y=+70.26, z=+125.45, name="head"),
45 | ]
46 |
47 | # ********************************
48 | # Leg Vectors
49 | # ********************************
50 |
51 | leg0_points = [
52 | Vector(x=+97.74, y=+69.20, z=+123.97, name="right-middle-body-contact"),
53 | Vector(x=+147.72, y=+67.82, z=+124.03, name="right-middle-coxia"),
54 | Vector(x=+271.07, y=+83.36, z=+162.03, name="right-middle-femur"),
55 | Vector(x=+353.52, y=-0.00, z=+0.00, name="right-middle-tibia"),
56 | ]
57 |
58 | leg1_points = [
59 | Vector(x=-3.68, y=+111.78, z=+103.96, name="right-front-body-contact"),
60 | Vector(x=-26.03, y=+151.90, z=+84.19, name="right-front-coxia"),
61 | Vector(x=-29.64, y=+218.89, z=+195.55, name="right-front-femur"),
62 | Vector(x=-69.47, y=+205.68, z=+0.00, name="right-front-tibia"),
63 | ]
64 |
65 | leg2_points = [
66 | Vector(x=-120.97, y=+28.74, z=+146.94, name="left-front-body-contact"),
67 | Vector(x=-165.74, y=+48.88, z=+137.44, name="left-front-coxia"),
68 | Vector(x=-164.27, y=+107.00, z=+253.72, name="left-front-femur"),
69 | Vector(x=-339.26, y=+165.39, z=+176.44, name="left-front-tibia"),
70 | ]
71 |
72 | leg3_points = [
73 | Vector(x=-97.74, y=-69.20, z=+195.60, name="left-middle-body-contact"),
74 | Vector(x=-142.46, y=-88.97, z=+206.04, name="left-middle-coxia"),
75 | Vector(x=-248.46, y=-160.12, z=+181.51, name="left-middle-femur"),
76 | Vector(x=-183.54, y=-213.39, z=+0.00, name="left-middle-tibia"),
77 | ]
78 |
79 | leg4_points = [
80 | Vector(x=+3.68, y=-111.78, z=+215.60, name="left-back-body-contact"),
81 | Vector(x=-1.93, y=-156.20, z=+237.87, name="left-back-coxia"),
82 | Vector(x=+0.55, y=-90.17, z=+349.83, name="left-back-femur"),
83 | Vector(x=-10.63, y=-244.11, z=+222.63, name="left-back-tibia"),
84 | ]
85 |
86 | leg5_points = [
87 | Vector(x=+120.97, y=-28.74, z=+172.63, name="right-back-body-contact"),
88 | Vector(x=+169.97, y=-37.86, z=+176.57, name="right-back-coxia"),
89 | Vector(x=+292.24, y=-43.54, z=+220.36, name="right-back-femur"),
90 | Vector(x=+353.93, y=-139.96, z=+56.35, name="right-back-tibia"),
91 | ]
92 |
93 | correct_leg_points = [
94 | leg0_points,
95 | leg1_points,
96 | leg2_points,
97 | leg3_points,
98 | leg4_points,
99 | leg5_points,
100 | ]
101 |
--------------------------------------------------------------------------------
/hexapod/ground_contact_solver/ground_contact_solver2.py:
--------------------------------------------------------------------------------
1 | """
2 | ❗❗❗This is a more general algorithm to account for the cases
3 | that are not handled correctly by the other ground_contact_solver.
4 | This will only be used by the kinematics-page of the app.
5 | This algorithm can be optimized or replaced if a more elegant
6 | algorithm is available.
7 | ❗❗❗
8 |
9 | We have 18 points total.
10 | (6 legs, three possible points per leg)
11 |
12 | We have a total of 540 combinations
13 | - get three legs out of six (20 combinations)
14 | - we have three possible points for each leg, that's 27 (3^3)
15 | - 27 * 20 is 540
16 |
17 | For each combination:
18 | 1. Check if stable if not, next
19 | - Check if the projection of the center of gravity to the plane
20 | defined by the three points lies inside the triangle, if not, next
21 | 2. Get the height and normal of the height and normal of the triangle plane
22 | (We need this for the next part)
23 | 3. For each of the three leg, check if the two other points on the leg is not a
24 | lower height, if condition if broken, next. (6 points total)
25 | 4. For each of the three other legs, check all points (3 points of each leg)
26 | if so, next. (9 points total)
27 | 5. If no condition is violated, then this is good, return this!
28 | """
29 | import random
30 | from hexapod.ground_contact_solver.shared import (
31 | is_stable,
32 | is_lower,
33 | find_legs_on_ground,
34 | SOME_LEG_TRIOS,
35 | ADJACENT_LEG_TRIOS,
36 | )
37 | from hexapod.points import get_normal_given_three_points, dot
38 |
39 | OTHER_POINTS_MAP = {1: (2, 3), 2: (3, 1), 3: (1, 2)}
40 |
41 | JOINT_TRIOS = []
42 | for i in range(3, 0, -1):
43 | for j in range(3, 0, -1):
44 | for k in range(3, 0, -1):
45 | JOINT_TRIOS.append((i, j, k))
46 |
47 |
48 | def compute_orientation_properties(legs):
49 | """
50 | Returns:
51 | - Which legs are on the ground
52 | - Normal vector of the plane defined by these legs
53 | - Distance of this plane to center of gravity
54 | """
55 | # prefer leg combinations where legs are not adjacent to each other
56 | # introduce some randomness so we are not bias in
57 | # choosing one stable position over another
58 | shuffled_some_leg_trios = random.sample(SOME_LEG_TRIOS, len(SOME_LEG_TRIOS))
59 | leg_trios = shuffled_some_leg_trios + ADJACENT_LEG_TRIOS
60 |
61 | for leg_trio in leg_trios:
62 |
63 | other_leg_trio = [i for i in range(6) if i not in leg_trio]
64 | other_three_legs = [legs[i] for i in other_leg_trio]
65 | three_legs = [legs[i] for i in leg_trio]
66 |
67 | for joint_trio in JOINT_TRIOS:
68 |
69 | p0, p1, p2 = [legs[i].get_point(j) for i, j in zip(leg_trio, joint_trio)]
70 |
71 | if not is_stable(p0, p1, p2):
72 | continue
73 |
74 | n = get_normal_given_three_points(p0, p1, p2)
75 | height = -dot(n, p0)
76 |
77 | if same_leg_joints_break_condition(three_legs, joint_trio, n, height):
78 | continue
79 |
80 | if other_leg_joints_break_condition(other_three_legs, n, height):
81 | continue
82 |
83 | legs_on_ground = find_legs_on_ground(legs, n, height)
84 | return legs_on_ground, n, height
85 |
86 | return [], None, None
87 |
88 |
89 | def same_leg_joints_break_condition(three_legs, three_point_ids, n, height):
90 | for leg, point_id in zip(three_legs, three_point_ids):
91 | for other_point_id in OTHER_POINTS_MAP[point_id]:
92 | point = leg.get_point(other_point_id)
93 | if is_lower(point, height, n):
94 | return True
95 | return False
96 |
97 |
98 | def other_leg_joints_break_condition(other_three_legs, n, height):
99 | for leg in other_three_legs:
100 | for point in leg.all_points[1:]:
101 | if is_lower(point, height, n):
102 | return True
103 | return False
104 |
--------------------------------------------------------------------------------
/hexapod/plotter.py:
--------------------------------------------------------------------------------
1 | # ********************
2 | # This module updates the figure dictionary
3 | # that plotly uses to draw the 3d graph
4 | # it takes in a hexapod model, and the figure to update
5 | # you can also update the camera view with it by passing a camera dictionary
6 | # ********************
7 |
8 |
9 | class HexapodPlotter:
10 | def __init__(self):
11 | pass
12 |
13 | @staticmethod
14 | def update(fig, hexapod):
15 | HexapodPlotter._draw_hexapod(fig, hexapod)
16 | HexapodPlotter._draw_scene(fig, hexapod)
17 |
18 | @staticmethod
19 | def change_camera_view(fig, camera):
20 | # camera = { 'up': {'x': 0, 'y': 0, 'z': 0},
21 | # 'center': {'x': 0, 'y': 0, 'z': 0},
22 | # 'eye': {'x': 0, 'y': 0, 'z': 0)}}
23 | fig["layout"]["scene"]["camera"] = camera
24 |
25 | @staticmethod
26 | def _draw_hexapod(fig, hexapod):
27 | # Body
28 | points = hexapod.body.vertices + [hexapod.body.vertices[0]]
29 |
30 | # Body Surface Mesh
31 | fig["data"][0]["x"] = [point.x for point in points]
32 | fig["data"][0]["y"] = [point.y for point in points]
33 | fig["data"][0]["z"] = [point.z for point in points]
34 |
35 | # Body Outline
36 | fig["data"][1]["x"] = fig["data"][0]["x"]
37 | fig["data"][1]["y"] = fig["data"][0]["y"]
38 | fig["data"][1]["z"] = fig["data"][0]["z"]
39 |
40 | fig["data"][2]["x"] = [hexapod.body.cog.x]
41 | fig["data"][2]["y"] = [hexapod.body.cog.y]
42 | fig["data"][2]["z"] = [hexapod.body.cog.z]
43 |
44 | fig["data"][3]["x"] = [hexapod.body.head.x]
45 | fig["data"][3]["y"] = [hexapod.body.head.y]
46 | fig["data"][3]["z"] = [hexapod.body.head.z]
47 |
48 | for n, leg in zip(range(4, 10), hexapod.legs):
49 | points = leg.all_points
50 | fig["data"][n]["x"] = [point.x for point in points]
51 | fig["data"][n]["y"] = [point.y for point in points]
52 | fig["data"][n]["z"] = [point.z for point in points]
53 |
54 | # Hexapod Support Polygon
55 | # Draw a mesh for body contact on ground
56 | dz = -1 # Mesh must be slightly below ground
57 | ground_contacts = hexapod.ground_contacts
58 | fig["data"][10]["x"] = [point.x for point in ground_contacts]
59 | fig["data"][10]["y"] = [point.y for point in ground_contacts]
60 | fig["data"][10]["z"] = [(point.z + dz) for point in ground_contacts]
61 |
62 | @staticmethod
63 | def _draw_scene(fig, hexapod):
64 | # Change range of view for all axes
65 | RANGE = hexapod.sum_of_dimensions()
66 | AXIS_RANGE = [-RANGE, RANGE]
67 |
68 | z_start = -10
69 | fig["layout"]["scene"]["xaxis"]["range"] = AXIS_RANGE
70 | fig["layout"]["scene"]["yaxis"]["range"] = AXIS_RANGE
71 | fig["layout"]["scene"]["zaxis"]["range"] = [z_start, (RANGE - z_start) * 2]
72 |
73 | axis_scale = hexapod.front / 2
74 |
75 | # Draw the hexapod local frame
76 | cog = hexapod.body.cog
77 | x_axis = hexapod.x_axis
78 | y_axis = hexapod.y_axis
79 | z_axis = hexapod.z_axis
80 |
81 | fig["data"][11]["x"] = [cog.x, cog.x + axis_scale * x_axis.x]
82 | fig["data"][11]["y"] = [cog.y, cog.y + axis_scale * x_axis.y]
83 | fig["data"][11]["z"] = [cog.z, cog.z + axis_scale * x_axis.z]
84 |
85 | fig["data"][12]["x"] = [cog.x, cog.x + axis_scale * y_axis.x]
86 | fig["data"][12]["y"] = [cog.y, cog.y + axis_scale * y_axis.y]
87 | fig["data"][12]["z"] = [cog.z, cog.z + axis_scale * y_axis.z]
88 |
89 | fig["data"][13]["x"] = [cog.x, cog.x + axis_scale * z_axis.x]
90 | fig["data"][13]["y"] = [cog.y, cog.y + axis_scale * z_axis.y]
91 | fig["data"][13]["z"] = [cog.z, cog.z + axis_scale * z_axis.z]
92 |
93 | # Scale the global coordinate frame
94 | fig["data"][14]["x"] = [0, axis_scale]
95 | fig["data"][14]["y"] = [0, 0]
96 | fig["data"][14]["z"] = [0, 0]
97 |
98 | fig["data"][15]["x"] = [0, 0]
99 | fig["data"][15]["y"] = [0, axis_scale]
100 | fig["data"][15]["z"] = [0, 0]
101 |
102 | fig["data"][16]["x"] = [0, 0]
103 | fig["data"][16]["y"] = [0, 0]
104 | fig["data"][16]["z"] = [0, axis_scale]
105 |
--------------------------------------------------------------------------------
/hexapod/ground_contact_solver/ground_contact_solver.py:
--------------------------------------------------------------------------------
1 | """
2 | ❗❗❗An algorithm for computing the robot's orientation
3 | assuming probably ground contacts are known.
4 |
5 | This algorithm rests upon the assumption that it
6 | knows which point of the each leg is in contact with the ground.
7 | This assumption seems to be true for all possible cases for
8 | leg-patterns page and inverse-kinematics page.
9 |
10 | But this is not true for all possible
11 | angle combinations (18 angles) that can be defined in
12 | the kinematics page.
13 |
14 | This module is used for the leg-patterns page,
15 | and the inverse-kinematics page.
16 |
17 | The other module will be used for the kinematics page.
18 | ❗❗❗
19 |
20 | This module is responsible for the following:
21 | 1. determining which legs of the hexapod is on the ground
22 | 2. Computing the normal vector of the triangle defined by at least three legs on the ground
23 | the normal vector wrt to the old normal vector that is defined by the legs on the ground in
24 | the hexapod's neutral position
25 | 3. Determining the height of the center of gravity (cog) wrt to the ground.
26 | ie this height is distance between the cog and the plane defined by ground contacts.
27 | """
28 | from hexapod.points import dot, get_normal_given_three_points
29 | from hexapod.ground_contact_solver.shared import (
30 | is_stable,
31 | is_lower,
32 | find_legs_on_ground,
33 | LEG_TRIOS,
34 | )
35 |
36 |
37 | def compute_orientation_properties(legs):
38 | """
39 | Returns:
40 | - Which legs are on the ground
41 | - Normal vector of the plane defined by these legs
42 | - Distance of this plane to center of gravity
43 | """
44 | n, height = find_ground_plane_properties(legs)
45 |
46 | # this pose is unstable, The hexapod has no balance
47 | if n is None:
48 | return [], None, None
49 |
50 | return find_legs_on_ground(legs, n, height), n, height
51 |
52 |
53 | def find_ground_plane_properties(legs):
54 | """
55 | Return three legs forming a stable position from legs,
56 | or None if no three legs satisfy this requirement.
57 | It also returns the normal vector of the plane
58 | defined by the three ground contacts, and the
59 | computed distance of the hexapod body to the ground plane
60 | """
61 | ground_contacts = [leg.ground_contact() for leg in legs]
62 |
63 | # (2, 3, 5) is a trio from the set [0, 1, 2, 3, 4, 5]
64 | # the corresponding other_trio of (2, 3, 5) is (0, 1, 4)
65 | # order is not important ie (2, 3, 5) is the same as (5, 3, 2)
66 | for trio in LEG_TRIOS:
67 | p0, p1, p2 = [ground_contacts[i] for i in trio]
68 |
69 | if not is_stable(p0, p1, p2):
70 | continue
71 |
72 | # Get the vector normal to plane defined by these points
73 | # ❗IMPORTANT: The normal is always pointing up
74 | # because of how we specified the order of the trio
75 | # (and the legs in general)
76 | # starting from middle-right (id:0) to right back (id:5)
77 | # always towards one direction (ccw)
78 | n = get_normal_given_three_points(p0, p1, p2)
79 |
80 | # p0 is vector from cog (0, 0, 0) to ground contact
81 | # dot product of this and normal we get the
82 | # hypothetical (negative) height of ground contact to cog
83 | #
84 | # cog * ^ (normal_vector) ----
85 | # \ | |
86 | # \ | -height
87 | # \| |
88 | # V p0 (foot_tip) ------
89 | #
90 | # using p0, p1 or p2 should yield the same result
91 | height = -dot(n, p0)
92 |
93 | # height should be the highest since
94 | # the plane defined by this trio is on the ground
95 | # the other legs ground contact cannot be lower than the ground
96 | other_trio = [i for i in range(6) if i not in trio]
97 | other_points = [ground_contacts[i] for i in other_trio]
98 | if no_other_legs_lower(n, height, other_points):
99 | # Found one!
100 | return n, height
101 |
102 | # Nothing met the condition
103 | return None, None
104 |
105 |
106 | def no_other_legs_lower(n, height, other_points):
107 | for point in other_points:
108 | if is_lower(point, height, n):
109 | return False
110 |
111 | return True
112 |
--------------------------------------------------------------------------------
/tests/kinematics_cases/case2.py:
--------------------------------------------------------------------------------
1 | from hexapod.points import Vector
2 |
3 | description = "Kinematics Random Pose #2"
4 |
5 | # ********************************
6 | # Dimensions
7 | # ********************************
8 |
9 | given_dimensions = {
10 | "front": 53,
11 | "side": 112,
12 | "middle": 124,
13 | "coxia": 65,
14 | "femur": 147,
15 | "tibia": 158,
16 | }
17 |
18 | # ********************************
19 | # Poses
20 | # ********************************
21 |
22 | given_poses = {
23 | 0: {
24 | "name": "right-middle",
25 | "id": 0,
26 | "coxia": -46.173564612682185,
27 | "femur": -0.5639873561713742,
28 | "tibia": -22.853557731606656,
29 | },
30 | 1: {
31 | "name": "right-front",
32 | "id": 1,
33 | "coxia": -38.57261437211969,
34 | "femur": -3.2736722565308938,
35 | "tibia": -24.640160005779748,
36 | },
37 | 2: {
38 | "name": "left-front",
39 | "id": 2,
40 | "coxia": 2.0526054688295687,
41 | "femur": 35.09407799312794,
42 | "tibia": -31.188148885325916,
43 | },
44 | 3: {
45 | "name": "left-middle",
46 | "id": 3,
47 | "coxia": -16.947073091191385,
48 | "femur": 46.44561383735447,
49 | "tibia": -19.412041056143877,
50 | },
51 | 4: {
52 | "name": "left-back",
53 | "id": 4,
54 | "coxia": -33.39847023693062,
55 | "femur": 41.05787103974741,
56 | "tibia": -5.900804146706449,
57 | },
58 | 5: {
59 | "name": "right-back",
60 | "id": 5,
61 | "coxia": -38.67228081907621,
62 | "femur": 18.790558327957655,
63 | "tibia": -30.220554892132796,
64 | },
65 | }
66 |
67 | # ********************************
68 | # Correct Body Vectors
69 | # ********************************
70 |
71 | correct_body_points = [
72 | Vector(x=+112.68, y=+45.33, z=+126.66, name="right-middle"),
73 | Vector(x=+5.57, y=+122.87, z=+116.68, name="right-front"),
74 | Vector(x=-90.76, y=+84.12, z=+95.32, name="left-front"),
75 | Vector(x=-112.68, y=-45.33, z=+76.69, name="left-middle"),
76 | Vector(x=-5.57, y=-122.87, z=+86.67, name="left-back"),
77 | Vector(x=+90.76, y=-84.12, z=+108.03, name="right-back"),
78 | Vector(x=+0.00, y=+0.00, z=+101.67, name="center-of-gravity"),
79 | Vector(x=-42.60, y=+103.49, z=+106.00, name="head"),
80 | ]
81 |
82 |
83 | # ********************************
84 | # Leg Vectors
85 | # ********************************
86 |
87 | leg0_points = [
88 | Vector(x=+112.68, y=+45.33, z=+126.66, name="right-middle-body-contact"),
89 | Vector(x=+171.42, y=+18.46, z=+133.92, name="right-middle-coxia"),
90 | Vector(x=+304.49, y=-42.16, z=+148.91, name="right-middle-femur"),
91 | Vector(x=+272.70, y=+0.00, z=-0.00, name="right-middle-tibia"),
92 | ]
93 |
94 |
95 | leg1_points = [
96 | Vector(x=+5.57, y=+122.87, z=+116.68, name="right-front-body-contact"),
97 | Vector(x=+61.49, y=+153.21, z=+129.97, name="right-front-coxia"),
98 | Vector(x=+189.21, y=+222.64, z=+151.78, name="right-front-femur"),
99 | Vector(x=+149.60, y=+203.72, z=-0.00, name="right-front-tibia"),
100 | ]
101 |
102 | leg2_points = [
103 | Vector(x=-90.76, y=+84.12, z=+95.32, name="left-front-body-contact"),
104 | Vector(x=-150.83, y=+107.65, z=+87.44, name="left-front-coxia"),
105 | Vector(x=-276.55, y=+141.74, z=+155.58, name="left-front-femur"),
106 | Vector(x=-259.37, y=+163.25, z=+0.00, name="left-front-tibia"),
107 | ]
108 |
109 | leg3_points = [
110 | Vector(x=-112.68, y=-45.33, z=+76.69, name="left-middle-body-contact"),
111 | Vector(x=-176.39, y=-50.56, z=+64.89, name="left-middle-coxia"),
112 | Vector(x=-293.99, y=-70.60, z=+150.78, name="left-middle-femur"),
113 | Vector(x=-340.16, y=-60.64, z=-0.00, name="left-middle-tibia"),
114 | ]
115 |
116 | leg4_points = [
117 | Vector(x=-5.57, y=-122.87, z=+86.67, name="left-back-body-contact"),
118 | Vector(x=-58.45, y=-158.23, z=+73.33, name="left-back-coxia"),
119 | Vector(x=-165.26, y=-229.31, z=+145.09, name="left-back-femur"),
120 | Vector(x=-217.06, y=-264.36, z=+0.00, name="left-back-tibia"),
121 | ]
122 |
123 | leg5_points = [
124 | Vector(x=+90.76, y=-84.12, z=+108.03, name="right-back-body-contact"),
125 | Vector(x=+121.84, y=-141.20, z=+106.97, name="right-back-coxia"),
126 | Vector(x=+180.23, y=-268.69, z=+151.07, name="right-back-femur"),
127 | Vector(x=+191.91, y=-223.89, z=+0.00, name="right-back-tibia"),
128 | ]
129 |
130 |
131 | correct_leg_points = [
132 | leg0_points,
133 | leg1_points,
134 | leg2_points,
135 | leg3_points,
136 | leg4_points,
137 | leg5_points,
138 | ]
139 |
--------------------------------------------------------------------------------
/hexapod/ik_solver/recompute_hexapod.py:
--------------------------------------------------------------------------------
1 | from copy import deepcopy
2 | import numpy as np
3 | from hexapod.models import VirtualHexapod, Hexagon
4 | from hexapod.points import (
5 | angle_between,
6 | is_counter_clockwise,
7 | Vector,
8 | rotz,
9 | vector_from_to,
10 | length,
11 | )
12 | from settings import ASSERTION_ENABLED, PRINT_IK
13 |
14 |
15 | def recompute_hexapod(dimensions, ik_parameters, poses):
16 |
17 | # make the hexapod with all angles = 0
18 | # update the hexapod so that we know which given points are in contact with the ground
19 | old_hexapod = VirtualHexapod(dimensions)
20 | old_hexapod.update_stance(ik_parameters["hip_stance"], ik_parameters["leg_stance"])
21 | old_contacts = deepcopy(old_hexapod.ground_contacts)
22 |
23 | # make a new hexapod with all angles = 0
24 | # and update given the poses/ angles we've computed
25 | new_hexapod = VirtualHexapod(dimensions)
26 | new_hexapod.update(poses)
27 | new_contacts = deepcopy(new_hexapod.ground_contacts)
28 |
29 | # get two points that are on the ground before and after
30 | # updating to the given poses
31 | id1, id2 = find_two_same_leg_ids(old_contacts, new_contacts)
32 |
33 | old_p1 = deepcopy(old_hexapod.legs[id1].ground_contact())
34 | old_p2 = deepcopy(old_hexapod.legs[id2].ground_contact())
35 | new_p1 = deepcopy(new_hexapod.legs[id1].ground_contact())
36 | new_p2 = deepcopy(new_hexapod.legs[id2].ground_contact())
37 |
38 | # we must translate and rotate the hexapod with the pose
39 | # so that the hexapod is stepping on the old predefined ground contact points
40 | old_vector = vector_from_to(old_p1, old_p2)
41 | new_vector = vector_from_to(new_p1, new_p2)
42 |
43 | _, twist_frame = find_twist_to_recompute_hexapod(new_vector, old_vector)
44 | new_hexapod.rotate_and_shift(twist_frame, 0)
45 |
46 | twisted_p2 = new_hexapod.legs[id2].foot_tip()
47 | translate_vector = vector_from_to(twisted_p2, old_p2)
48 | new_hexapod.move_xyz(translate_vector.x, translate_vector.y, 0)
49 |
50 | might_sanity_check_points(new_p1, new_p2, old_p1, old_p2, new_vector, old_vector)
51 |
52 | return new_hexapod
53 |
54 |
55 | def make_contact_dict(ground_contact_list):
56 | # map index in ground_contact_list
57 | contact_dict = {}
58 | for contact in ground_contact_list:
59 | left_or_right, front_mid_back, _ = contact.name.split("-")
60 | leg_placement = left_or_right + "-" + front_mid_back
61 | leg_id = Hexagon.VERTEX_NAMES.index(leg_placement)
62 | contact_dict[leg_id] = leg_placement
63 |
64 | return contact_dict
65 |
66 |
67 | def find_two_same_leg_ids(old_contacts, new_contacts):
68 | same_ids = []
69 | old_contact_dict = make_contact_dict(old_contacts)
70 | new_contact_dict = make_contact_dict(new_contacts)
71 |
72 | if PRINT_IK:
73 | print("In recomputing hexapod:")
74 | print("...old contacts:", old_contact_dict)
75 | print("...new_contacts: ", old_contact_dict)
76 |
77 | for leg_id in old_contact_dict:
78 | if leg_id not in new_contact_dict:
79 | continue
80 |
81 | same_ids.append(leg_id)
82 | if len(same_ids) == 2:
83 | return same_ids[0], same_ids[1]
84 |
85 | raise Exception(
86 | f"Need at least two same points on ground.\n\
87 | old: {old_contact_dict}\n new: {new_contact_dict}"
88 | )
89 |
90 |
91 | def find_twist_to_recompute_hexapod(a, b):
92 | twist = angle_between(a, b)
93 | z_axis = Vector(0, 0, -1)
94 | is_ccw = is_counter_clockwise(a, b, z_axis)
95 | if is_ccw:
96 | twist = -twist
97 |
98 | twist_frame = rotz(twist)
99 | return twist, twist_frame
100 |
101 |
102 | def should_be_on_ground_msg(point):
103 | return f"Vector should be on the ground:\n{point}, z != 0"
104 |
105 |
106 | def might_sanity_check_points(new_p1, new_p2, old_p1, old_p2, new_vector, old_vector):
107 | if not ASSERTION_ENABLED:
108 | return
109 |
110 | print("Sanity check on hexapod.ik_solver.recompute_hexapod")
111 | assert np.isclose(new_p1.z, 0, atol=1), should_be_on_ground_msg(new_p1)
112 | assert np.isclose(new_p2.z, 0, atol=1), should_be_on_ground_msg(new_p2)
113 | assert np.isclose(old_p1.z, 0, atol=1), should_be_on_ground_msg(old_p1)
114 | assert np.isclose(old_p2.z, 0, atol=1), should_be_on_ground_msg(old_p2)
115 |
116 | assert new_p1.name == old_p1.name, f"Should be the same name:\n{old_p1}\n{new_p1}"
117 | assert new_p2.name == old_p2.name, f"Should be the same name:\n{old_p2}\n{new_p2}"
118 | assert np.isclose(
119 | length(new_vector), length(old_vector), atol=1.0
120 | ), f"Should be same length.\nnew_vector:{new_vector}\n old_vector:{old_vector}"
121 |
--------------------------------------------------------------------------------
/hexapod/ik_solver/helpers.py:
--------------------------------------------------------------------------------
1 | # Used for checking edge cases
2 | # and also for printing final results
3 | import json
4 | import numpy as np
5 | from settings import (
6 | PRINT_IK_LOCAL_LEG,
7 | ASSERTION_ENABLED,
8 | PRINT_IK,
9 | BETA_MAX_ANGLE,
10 | GAMMA_MAX_ANGLE,
11 | )
12 | from hexapod.points import length, vector_from_to, angle_between
13 |
14 | COXIA_ON_GROUND_ALERT_MSG = "Impossible at given height.\ncoxia joint shoved on ground"
15 | BODY_ON_GROUND_ALERT_MSG = "Impossible at given height.\nbody contact shoved on ground"
16 |
17 |
18 | def cant_reach_alert_msg(leg_name, problem):
19 | msg = "Cannot reach target ground point.\n"
20 | if problem == "femur":
21 | msg += f"Femur length of {leg_name} leg is too long."
22 | if problem == "tibia":
23 | msg += f"Femur length of {leg_name} leg is too long."
24 | else:
25 | # blocking
26 | msg = f"The {leg_name} leg cannot reach it because the ground is blocking the path."
27 | return msg
28 |
29 |
30 | def body_contact_shoved_on_ground(hexapod):
31 | for i in range(hexapod.LEG_COUNT):
32 | body_contact = hexapod.body.vertices[i]
33 | foot_tip = hexapod.legs[i].foot_tip()
34 | if body_contact.z < foot_tip.z:
35 | return True
36 | return False
37 |
38 |
39 | def legs_too_short(legs):
40 | # True when
41 | # if three of her left legs are up or
42 | # if three of her right legs are up or
43 | # if four legs are up
44 | if len(legs) >= 4:
45 | return True, f"Unstable. Too many legs off the floor.\n{legs}"
46 |
47 | leg_positions = [leg.split("-")[0] for leg in legs]
48 | if leg_positions.count("left") == 3:
49 | return True, f"Unstable. All left legs off the ground.\n{legs}"
50 | if leg_positions.count("right") == 3:
51 | return True, f"Unstable. All right legs off the ground.\n{legs}"
52 |
53 | return False, None
54 |
55 |
56 | def angle_above_limit(angle, angle_range, leg_name, angle_name):
57 | if np.abs(angle) > angle_range:
58 | alert_msg = f"The {angle_name} (of {leg_name} leg) required\n\
59 | to do this pose is beyond the range of motion.\n\
60 | Required: {angle} degrees. Limit: {angle_range} degrees."
61 | return True, alert_msg
62 |
63 | return False, None
64 |
65 |
66 | def beta_gamma_not_in_range(beta, gamma, leg_name):
67 | limit, msg = angle_above_limit(beta, BETA_MAX_ANGLE, leg_name, "(beta/femur)")
68 | if limit:
69 | return True, msg
70 |
71 | limit, msg = angle_above_limit(gamma, GAMMA_MAX_ANGLE, leg_name, "(gamma/tibia)")
72 | if limit:
73 | return True, msg
74 |
75 | return False, None
76 |
77 |
78 | def wrong_length_msg(leg_name, limb_name, limb_value):
79 | return f"Wrong {limb_name} vector length. {leg_name} coxia:{limb_value}"
80 |
81 |
82 | def might_sanity_leg_lengths_check(hexapod, leg_name, points):
83 | if not ASSERTION_ENABLED:
84 | return
85 |
86 | coxia = length(vector_from_to(points[0], points[1]))
87 | femur = length(vector_from_to(points[1], points[2]))
88 | tibia = length(vector_from_to(points[2], points[3]))
89 |
90 | same_length = np.isclose(hexapod.coxia, coxia, atol=1)
91 | assert same_length, wrong_length_msg(leg_name, "coxia", coxia)
92 |
93 | same_length = np.isclose(hexapod.femur, femur, atol=1)
94 | assert same_length, wrong_length_msg(leg_name, "femur", femur)
95 |
96 | same_length = np.isclose(hexapod.tibia, tibia, atol=1)
97 | assert same_length, wrong_length_msg(leg_name, "tibia", tibia)
98 |
99 |
100 | def might_sanity_beta_gamma_check(beta, gamma, leg_name, points):
101 | if not ASSERTION_ENABLED:
102 | return
103 |
104 | coxia = vector_from_to(points[0], points[1])
105 | femur = vector_from_to(points[1], points[2])
106 | tibia = vector_from_to(points[2], points[3])
107 | result_beta = angle_between(coxia, femur)
108 |
109 | same_beta = np.isclose(np.abs(beta), result_beta, atol=1)
110 | assert same_beta, f"{leg_name} leg: expected: |{beta}|, found: {result_beta}"
111 |
112 | # ❗IMPORTANT: Sometimes both are zero. Is this wrong?
113 | femur_tibia_angle = angle_between(femur, tibia)
114 | is_90 = np.isclose(90, femur_tibia_angle + gamma, atol=1)
115 |
116 | if not is_90:
117 | alert_msg = f"{leg_name} leg:\
118 | {femur_tibia_angle} (femur-tibia angle) + {gamma} (gamma) != 90."
119 | print(alert_msg)
120 |
121 |
122 | def might_print_ik(poses, ik_parameters, hexapod):
123 | if not PRINT_IK:
124 | return
125 |
126 | print("█████████████████████████████")
127 | print("█ START INVERSE KINEMATICS █")
128 | print("█████████████████████████████")
129 |
130 | print(".....................")
131 | print("... hexapod dimensions: ")
132 | print(".....................")
133 | print(json.dumps(hexapod.dimensions, indent=4))
134 |
135 | print(".....................")
136 | print("... ik parameters: ")
137 | print(".....................")
138 | print(json.dumps(ik_parameters, indent=4))
139 |
140 | print(".....................")
141 | print("... poses: ")
142 | print(".....................")
143 | print(json.dumps(poses, indent=4))
144 |
145 | print("█████████████████████████████")
146 | print("█ END INVERSE KINEMATICS █")
147 | print("█████████████████████████████")
148 |
149 |
150 | def might_print_points(points, leg_name):
151 | if not PRINT_IK_LOCAL_LEG:
152 | return
153 |
154 | print(leg_name, "leg")
155 | for i, point in enumerate(points):
156 | print(f"...p{i}: {point}")
157 | print()
158 |
--------------------------------------------------------------------------------
/hexapod/ik_solver/README.md:
--------------------------------------------------------------------------------
1 | # The Inverse Kinematics Algorithm
2 |
3 | ## Overview
4 |
5 | ```python
6 | # Given we know:
7 | # - The point where the hexapod body connect with each hexapod leg (point p0 aka body contact)
8 | # - Where the hexapod leg should connect with the ground (p3 aka target ground point)
9 | #
10 | # We want to solve for:
11 | # - All the 18 angles (alpha, beta, gamma)
12 | # - All the 12 joint points (coxia joint p1) and (femur joint p2)
13 |
14 | ```
15 |
16 | ## Rough algorithm in the hexapod frame
17 |
18 | In the hexapod frame, the coxia vector is the projected vector (in the plane of the hexapod body) of the vector from the body contact pointing to the target ground point.
19 |
20 | ```python
21 | # body_to_foot_vector = vector from p0 to p3
22 | # coxia vector = projection of the body_to_foot vector to the hexapod body (hexagon) plane
23 | #
24 | # * (p3) Target foot tip
25 | # *----*----* /
26 | # / \ /
27 | # / cog \ /
28 | # * * */ (p0) body contact
29 | # \ /
30 | # \ /
31 | # *----*----*
32 | #
33 | # hexapod y_axis
34 | # |
35 | # |
36 | # * - -> hexapod x_axis
37 | ```
38 |
39 | We can find the angle between the coxia vector wrt to the x axis of the hexapod.
40 | Then we can find the angle alpha which is the relative x axis for each attached linkage
41 | as shown in the figure which is the alpha.
42 |
43 | ```python
44 | # Relative x-axis, for each attached linkage
45 | # Angle each respective relative angle makes wrt to the
46 | # COXIA_AXES = [0, 45, 135, 180, 225, 315] starting from x0 to x5
47 | #
48 | # x2 x1
49 | # \ /
50 | # *---*---*
51 | # / | \
52 | # / | \
53 | # / | \
54 | # x3 --*------cog------*-- x0
55 | # \ | /
56 | # \ | /
57 | # \ | /
58 | # *---*---*
59 | # / \
60 | # x4 x5
61 | #
62 | # hexapod y
63 | # |
64 | # |
65 | # * - - hexapod x
66 | ```
67 |
68 | ## Rough algorithm in the local leg frame
69 |
70 | ```python
71 | # |--coxia-----\ ----
72 | # p0 ------- p1 \ \
73 | # \ femur
74 | # \ \
75 | # p2 ---
76 | # / /
77 | # / tibia
78 | # / /
79 | # p3 -------
80 | #
81 | # Given / Knowns:
82 | # - point p0
83 | # - point p3
84 | # - coxia length
85 | # - femur length
86 | # - tibia length
87 | # - given p0 and p1 lie on the same known axis
88 | #
89 | # Find /Unknowns:
90 | # p1
91 | # p2
92 | # beta - angle between coxia vector (leg x axis) and femur vector
93 | # gamma - angle between tibia vector and perpendicular vector to femur vector
94 | ```
95 |
96 | ## Definitions and Cases
97 |
98 | ```python
99 | #
100 | #
101 | # **********************
102 | # DEFINITIONS
103 | # **********************
104 | # p0: Body contact point
105 | # p1: coxia point / coxia joint (point between coxia limb and femur limb)
106 | # p2: tibia point / tibia joint (point between femur limb and tibia limb)
107 | # p3: foot tip / ground contact
108 | # coxia vector - vector from p0 to p1
109 | # hexapod.coxia - coxia vector length
110 | # femur vector - vector from p1 to p2
111 | # hexapod.femur - femur vector length
112 | # tibia vector - vector from p2 to p3
113 | # hexapod.tibia - tibia vector length
114 | # body_to_foot vector - vector from p0 to p3
115 | # coxia_to_foot vector - vector from p1 to p3
116 | # d: coxia_to_foot_length
117 | # body_to_foot_length
118 | #
119 | # rho
120 | # -- angle between coxia vector (leg x axis) and body to foot vector
121 | # -- angle between point p1, p0, and p3. (p0 at center)
122 | # theta
123 | # --- angle between femur vector and coxia to foot vector
124 | # --- angle between point p2, p1, and p3. (p1 at center)
125 | # phi
126 | # --- angle between coxia vector (leg x axis) and coxia to foot vector
127 | #
128 | # beta
129 | # --- angle between coxia vector (leg x axis) and femur vector
130 | # --- positive is counter clockwise
131 | # gamma
132 | # --- angle between tibia vector and perpendicular vector to femur vector
133 | # --- positive is counter clockwise
134 | # alpha
135 | # --- angle between leg coordinate frame and axis defined by line from
136 | # hexapod's center of gravity to body contact.
137 | #
138 | #
139 | # For CASE 1 and CASE 2:
140 | # beta = theta - phi
141 | # beta is positive when phi < theta (case 1)
142 | # beta is negative when phi > theta (case 2)
143 | # *****************
144 | # Case 1 (beta IS POSITIVE)
145 | # *****************
146 | #
147 | # ^ (p2)
148 | # | *
149 | # (leg_z_axis) / |
150 | # | / |
151 | # | / |
152 | # (p0) (p1)/ |
153 | # *------- *-----| ----------------> (leg_x_axis)
154 | # \ \ |
155 | # \ \ |
156 | # \ \ |
157 | # \ \ |
158 | # \ \ |
159 | # \ |
160 | # \ * (p3)
161 | #
162 | #
163 | # *****************
164 | # Case 2 (beta is negative)
165 | # *****************
166 | # ^
167 | # |
168 | # (leg_z_axis direction)
169 | # (p0) (p1) |
170 | # *------- *----------------|------> (leg_x_axis direction)
171 | # \ | \
172 | # \ | \
173 | # \ | \
174 | # \ | * (p2)
175 | # \ | /
176 | # \ | /
177 | # \ | /
178 | # \ | /
179 | # \| /
180 | # *
181 | #
182 | # *****************
183 | # Case 3 (p3 is above p1) then beta = phi + theta
184 | # *****************
185 | # * (p2)
186 | # / \
187 | # / |
188 | # / * (p3)
189 | # / /
190 | # *------ * /
191 | # (p0) (p1)
192 | #
193 | #
194 | ```
195 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | [](https://ko-fi.com/minimithi)
2 | [](https://travis-ci.com/github/mithi/hexapod-robot-simulator)
3 | [](https://codecov.io/gh/mithi/hexapod-robot-simulator)
4 | [](https://codeclimate.com/github/mithi/hexapod-robot-simulator)
5 | [](https://codeclimate.com/github/mithi/hexapod-robot-simulator/trends/technical_debt)
6 | [](https://hits.dwyl.com/mithi/hexapod-robot-simulator)
7 | [](./LICENSE)
8 | [](https://github.com/psf/black)
9 | [](https://github.com/mithi/hexapod-robot-simulator/issues?q=is%3Aissue+is%3Aopen+label%3A%22help+wanted%22)
10 | [](https://www.firsttimersonly.com/)
11 |
12 | # Mithi's Hexapod Robot Simulator
13 |
14 | - A bare minimum browser-based hexapod robot simulator built from first principles 🕷️
15 | - If you like this project, consider [buying me a few ☕ cups of coffee](https://ko-fi.com/minimithi). 💕
16 |
17 | | | | | |
18 | |---------|---------|---------|---------|
19 | || |
| ||
20 |
21 | # Announcement
22 |
23 | You might be interested in checking out my [rewrite in Javascript](http://github.com/mithi/hexapod), live at: https://hexapod.netlify.app/ , which is like 10000000x faster. If you'd like to build you're own user interface with Node, you can download the algorithm alone as a package in the npm registry: [Hexapod Kinematics Library](https://github.com/mithi/hexapod-kinematics-library). There is also [a "fork" modified where you can use the app to control a physical hexapod robot](https://github.com/mithi/hexapod-irl) as you can see in the gif below.
24 |
25 |
||
20 |
21 | # Announcement
22 |
23 | You might be interested in checking out my [rewrite in Javascript](http://github.com/mithi/hexapod), live at: https://hexapod.netlify.app/ , which is like 10000000x faster. If you'd like to build you're own user interface with Node, you can download the algorithm alone as a package in the npm registry: [Hexapod Kinematics Library](https://github.com/mithi/hexapod-kinematics-library). There is also [a "fork" modified where you can use the app to control a physical hexapod robot](https://github.com/mithi/hexapod-irl) as you can see in the gif below.
24 |
25 |
26 |  27 |
27 |
28 |
29 | # Features
30 |
31 | | STATUS | FEATURE | DESCRIPTION |
32 | |---|-----------|--------------|
33 | | 🎉 | Forward Kinematics | Given the angles of each joint, what does the robot look like?|
34 | | 🎉 | Inverse Kinematics | What are the angles of each joint to make the robot look the way I want? Is it even possible? Why or why not? |
35 | | 🎉 | Uniform Movements | If all of the legs behaved the same way, how will the hexapod robot as a whole behave? |
36 | | 🎉 | Customizability | Set the dimensions and shape of the robot's body and legs. (6 parameters) |
37 | | 🎉 | Usability | Control the camera view, pan, tilt, zoom, whatever. |
38 | | 🎉 | Simplicity | Minimal dependencies. Depends solely on Numpy for calculations. Uses only Plotly Dash for plotting, Dash can be safely replaced if a better 3d plotting library is available. |
39 | | ❗ | Stability Check (WIP) | If we pose the robot in a particular way, will it fall over? |
40 | | ❗ | Fast | Okay, it's not as fast as I wanted, but when run locally, it's okay |
41 | | ❗ | Bug-free | Fine, right now there's still room for improvement |
42 | | ❗ | Well-tested | Yeah, I need to compile test cases first |
43 |
44 | ## Preview
45 |
46 | |||
47 | |----|----|
48 | |  |  |
49 |
50 | ## Requirements
51 |
52 | - [x] Python 3.8.1
53 | - [x] Plotly Dash 1.18.1
54 | - [x] Plotly Dash Daq 0.5.0
55 | - [x] Numpy 1.19.5
56 | - [x] See also [./requirements.txt](./requirements.txt)
57 |
58 | ## Run
59 |
60 | ```bash
61 | $ python index.py
62 | Running on http://127.0.0.1:8050/
63 | ```
64 |
65 | - Modify default settings with [./settings.py](./settings.py)
66 | - Dark Mode is the default - modify page styles with [./style_settings.py](./style_settings.py)
67 |
68 | ## Screenshots
69 |
70 | | 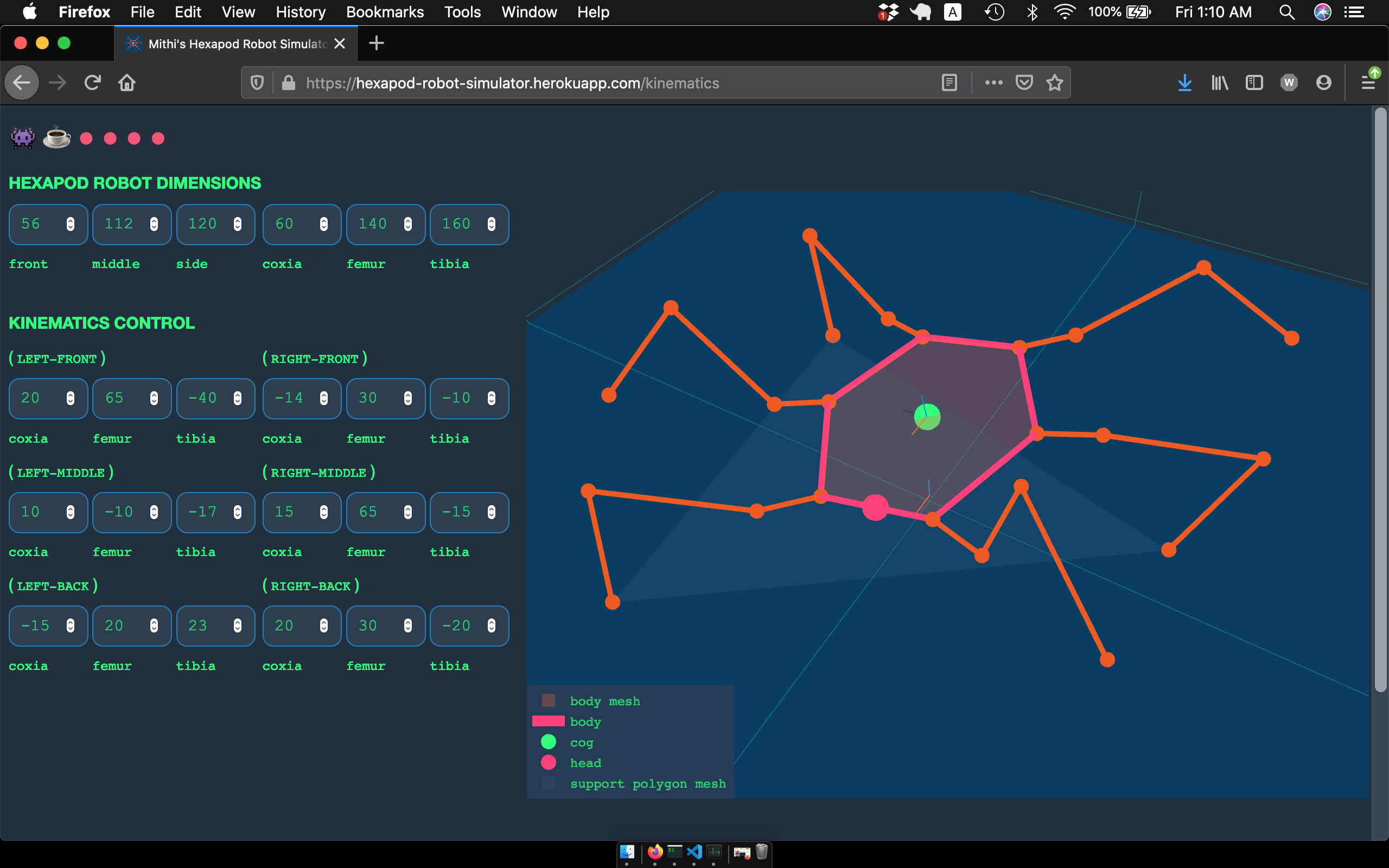|
71 | |---|
72 | | 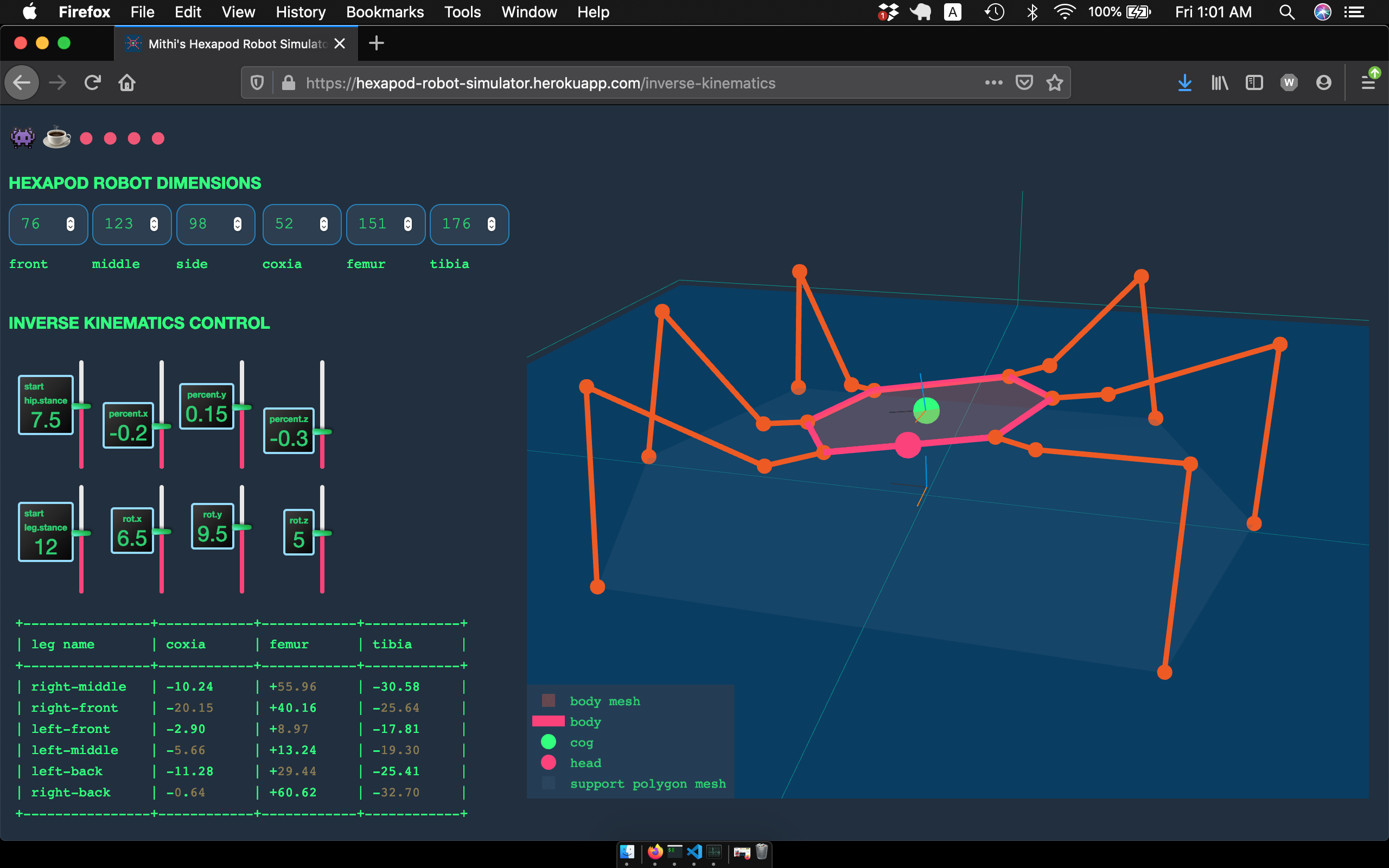|
73 |
74 | ## More Information
75 | Check the [Wiki](https://github.com/mithi/hexapod-robot-simulator/wiki/Notes) for more additional information
76 |
77 | ## 🤗 Contributors
78 |
79 | - [@mithi](https://github.com/mithi/)
80 | - [@philippeitis](https://github.com/philippeitis/)
81 | - [@mikong](https://github.com/mikong/)
82 | - [@guilyx](https://github.com/guilyx)
83 | - [@markkulube](https://github.com/markkulube)
84 |
85 | 
86 | 
87 | 
88 | 
89 | 
90 | 
91 | 
92 | 
93 | 
94 | 
95 |
--------------------------------------------------------------------------------
/hexapod/linkage.py:
--------------------------------------------------------------------------------
1 | # -------------
2 | # LINKAGE
3 | # -------------
4 | # Neutral position of the linkages (alpha=0, beta=0, gamma=0)
5 | # note that at neutral position:
6 | # link b and link c are perpendicular to each other
7 | # link a and link b form a straight line
8 | # link a and the leg x axis are aligned
9 | #
10 | # alpha - the angle linkage a makes with x_axis about z axis
11 | # beta - the angle that linkage a makes with linkage b
12 | # gamma - the angle that linkage c make with the line perpendicular to linkage b
13 | #
14 | #
15 | # MEASUREMENTS
16 | #
17 | # |--- a--------|--b--|
18 | # |=============|=====| p2 -------
19 | # p0 p1 | |
20 | # | |
21 | # | c
22 | # | |
23 | # | |
24 | # | p3 ------
25 | #
26 | # p0 - body contact
27 | # p1 - coxia point
28 | # p2 - femur point
29 | # p3 - foot tip
30 | #
31 | # z axis
32 | # |
33 | # |
34 | # |------- x axis
35 | # origin
36 | #
37 | #
38 | # ANGLES beta and gamma
39 | # /
40 | # / beta
41 | # ---- /* ---------
42 | # / //\\ \
43 | # b // \\ \
44 | # / // \\ c
45 | # / //beta \\ \
46 | # *=======* ----> \\ \
47 | # |---a---| \\ \
48 | # *-----------
49 | #
50 | # |--a--|---b----|
51 | # *=====*=========* -------------
52 | # | \\ \
53 | # | \\ \
54 | # | \\ c
55 | # | \\ \
56 | # |gamma\\ \
57 | # | *----------------
58 | #
59 | from copy import deepcopy
60 | import numpy as np
61 | from hexapod.points import (
62 | Vector,
63 | frame_yrotate_xtranslate,
64 | frame_zrotate_xytranslate,
65 | )
66 |
67 |
68 | class Linkage:
69 | POINT_NAMES = ["coxia", "femur", "tibia"]
70 |
71 | __slots__ = (
72 | "a",
73 | "b",
74 | "c",
75 | "alpha",
76 | "beta",
77 | "gamma",
78 | "coxia_axis",
79 | "new_origin",
80 | "name",
81 | "id",
82 | "all_points",
83 | "ground_contact_point",
84 | )
85 |
86 | def __init__(
87 | self,
88 | a,
89 | b,
90 | c,
91 | alpha=0,
92 | beta=0,
93 | gamma=0,
94 | coxia_axis=0,
95 | new_origin=Vector(0, 0, 0),
96 | name=None,
97 | id_number=None,
98 | ):
99 | self.a = a
100 | self.b = b
101 | self.c = c
102 | self.new_origin = new_origin
103 | self.coxia_axis = coxia_axis
104 | self.id = id_number
105 | self.name = name
106 | self.change_pose(alpha, beta, gamma)
107 |
108 | def coxia_angle(self):
109 | return self.alpha
110 |
111 | def body_contact(self):
112 | return self.all_points[0]
113 |
114 | def coxia_point(self):
115 | return self.all_points[1]
116 |
117 | def femur_point(self):
118 | return self.all_points[2]
119 |
120 | def foot_tip(self):
121 | return self.all_points[3]
122 |
123 | def ground_contact(self):
124 | return self.ground_contact_point
125 |
126 | def get_point(self, i):
127 | return self.all_points[i]
128 |
129 | def change_pose(self, alpha, beta, gamma):
130 | self.alpha = alpha
131 | self.beta = beta
132 | self.gamma = gamma
133 |
134 | # frame_ab is the pose of frame_b wrt frame_a
135 | frame_01 = frame_yrotate_xtranslate(theta=-self.beta, x=self.a)
136 | frame_12 = frame_yrotate_xtranslate(theta=90 - self.gamma, x=self.b)
137 | frame_23 = frame_yrotate_xtranslate(theta=0, x=self.c)
138 |
139 | frame_02 = np.matmul(frame_01, frame_12)
140 | frame_03 = np.matmul(frame_02, frame_23)
141 | new_frame = frame_zrotate_xytranslate(
142 | self.coxia_axis + self.alpha, self.new_origin.x, self.new_origin.y
143 | )
144 |
145 | # find points wrt to body contact point
146 | p0 = Vector(0, 0, 0)
147 | p1 = p0.get_point_wrt(frame_01)
148 | p2 = p0.get_point_wrt(frame_02)
149 | p3 = p0.get_point_wrt(frame_03)
150 |
151 | # find points wrt to center of gravity
152 | p0 = deepcopy(self.new_origin)
153 | p0.name += "-body-contact"
154 | p1 = p1.get_point_wrt(new_frame, name=self.name + "-coxia")
155 | p2 = p2.get_point_wrt(new_frame, name=self.name + "-femur")
156 | p3 = p3.get_point_wrt(new_frame, name=self.name + "-tibia")
157 |
158 | self.all_points = [p0, p1, p2, p3]
159 | self.ground_contact_point = self.compute_ground_contact()
160 |
161 | def update_leg_wrt(self, frame, height):
162 | for point in self.all_points:
163 | point.update_point_wrt(frame, height)
164 |
165 | def compute_ground_contact(self):
166 | # ❗IMPORTANT: Verify if this assumption is correct
167 | # ❗VERIFIED: This assumption is indeed wrong
168 | ground_contact = self.all_points[3]
169 | for point in reversed(self.all_points):
170 | if point.z < ground_contact.z:
171 | ground_contact = point
172 |
173 | return ground_contact
174 |
175 | def __str__(self):
176 | leg_string = f"{self!r}\n"
177 | leg_string += f"Vectors of {self.name} leg:\n"
178 |
179 | for point in self.all_points:
180 | leg_string += f" {point}\n"
181 |
182 | leg_string += f" ground contact: {self.ground_contact()}\n"
183 | return leg_string
184 |
185 | def __repr__(self):
186 | return f"""Linkage(
187 | a={self.a},
188 | b={self.b},
189 | c={self.c},
190 | alpha={self.alpha},
191 | beta={self.beta},
192 | gamma={self.gamma},
193 | coxia_axis={self.coxia_axis},
194 | id_number={self.id},
195 | name='{self.name}',
196 | new_origin={self.new_origin},
197 | )"""
198 |
199 |
200 | #
201 | # /*
202 | # //\\
203 | # // \\
204 | # // \\
205 | # // \\
206 | # *===* ----> \\ ---------
207 | # \\ |
208 | # \\ tip height (positive)
209 | # \\ |
210 | # \\ -----
211 | #
212 | #
213 | # *===*=======*
214 | # | \\
215 | # | \\
216 | # (positive)| \\
217 | # tip height \\
218 | # | \\
219 | # ------ *----
220 | #
221 | # *=========* -----
222 | # // |
223 | # // (negative) tip height
224 | # // |
225 | # *===*=======* -------------------
226 | # Negative only if body contact point
227 | # is touching the ground
228 |
--------------------------------------------------------------------------------
/hexapod/points.py:
--------------------------------------------------------------------------------
1 | # This module contains the Vector class
2 | # and functions for manipulating vectors
3 | # and finding properties and relationships of vectors
4 | # computing reference frames
5 | from math import sqrt, radians, sin, cos, degrees, acos, isnan
6 | import numpy as np
7 |
8 | from settings import DEBUG_MODE
9 |
10 |
11 | class Vector:
12 | __slots__ = ("x", "y", "z", "name")
13 |
14 | def __init__(self, x, y, z, name=None):
15 | self.x = x
16 | self.y = y
17 | self.z = z
18 | self.name = name
19 |
20 | def get_point_wrt(self, reference_frame, name=None):
21 | """
22 | Given frame_ab which is the pose of frame_b wrt frame_a
23 | and that this point is defined wrt to frame_b
24 | Return point defined wrt to frame a
25 | """
26 | p = np.array([self.x, self.y, self.z, 1])
27 | p = np.matmul(reference_frame, p)
28 | return Vector(p[0], p[1], p[2], name)
29 |
30 | def update_point_wrt(self, reference_frame, z=0):
31 | p = np.array([self.x, self.y, self.z, 1])
32 | p = np.matmul(reference_frame, p)
33 | self.x = p[0]
34 | self.y = p[1]
35 | self.z = p[2] + z
36 |
37 | def move_xyz(self, x, y, z):
38 | self.x += x
39 | self.y += y
40 | self.z += z
41 |
42 | def move_up(self, z):
43 | self.z += z
44 |
45 | @property
46 | def vec(self):
47 | return self.x, self.y, self.z
48 |
49 | def __repr__(self):
50 | s = f"Vector(x={self.x:>+8.2f}, y={self.y:>+8.2f}, z={self.z:>+8.2f}, name='{self.name}')"
51 | return s
52 |
53 | def __str__(self):
54 | return repr(self)
55 |
56 | def __eq__(self, other, percent_tol=0.0075):
57 | if not isinstance(other, Vector):
58 | return False
59 |
60 | tol = length(self) * percent_tol
61 | equal_val = np.allclose(self.vec, other.vec, atol=tol)
62 | equal_name = self.name == other.name
63 | return equal_val and equal_name
64 |
65 |
66 | # *********************************************
67 | # https://stackoverflow.com/questions/2049582/how-to-determine-if-a-point-is-in-a-2d-triangle
68 | # https://www.geeksforgeeks.org/check-whether-a-given-point-lies-inside-a-triangle-or-not/
69 | # It works like this:
70 | # - Walk clockwise or counterclockwise around the triangle
71 | # and project the point onto the segment we are crossing
72 | # by using the dot product.
73 | # - Check that the vector created is on the same side
74 | # for each of the triangle's segments
75 | def is_point_inside_triangle(p, a, b, c):
76 | ab = (p.x - b.x) * (a.y - b.y) - (a.x - b.x) * (p.y - b.y)
77 | bc = (p.x - c.x) * (b.y - c.y) - (b.x - c.x) * (p.y - c.y)
78 | ca = (p.x - a.x) * (c.y - a.y) - (c.x - a.x) * (p.y - a.y)
79 | # must be all positive or all negative
80 | return (ab < 0.0) == (bc < 0.0) == (ca < 0.0)
81 |
82 |
83 | def is_triangle(a, b, c):
84 | return (a + b > c) and (a + c > b) and (b + c > a)
85 |
86 |
87 | # https://www.maplesoft.com/support/help/Maple/view.aspx?path=MathApps%2FProjectionOfVectorOntoPlane
88 | # u is the vector, n is the plane normal
89 | def project_vector_onto_plane(u, n):
90 | s = dot(u, n) / dot(n, n)
91 | temporary_vector = scalar_multiply(n, s)
92 | return subtract_vectors(u, temporary_vector)
93 |
94 |
95 | def might_print_angle_between_error(a, b):
96 | if DEBUG_MODE:
97 | print(
98 | f"❗❗❗ERROR: angle_between({a}, {b}) is NAN\
99 | ... One of the might be a zero vector\
100 | ... the vectors might be pointing at the same direction or\
101 | ... something else entirely. 🤔"
102 | )
103 |
104 |
105 | def angle_between(a, b):
106 | # returns the shortest angle between two vectors
107 | cos_theta = dot(a, b) / sqrt(dot(a, a) * dot(b, b))
108 | theta = degrees(acos(cos_theta))
109 |
110 | if isnan(theta):
111 | might_print_angle_between_error(a, b)
112 | return 0.0
113 |
114 | return theta
115 |
116 |
117 | def angle_opposite_of_last_side(a, b, c):
118 | ratio = (a * a + b * b - c * c) / (2 * a * b)
119 | return degrees(acos(ratio))
120 |
121 |
122 | # Check if angle from vector a to b about normal n is positive
123 | # Rotating from vector a to is moving into a conter clockwise direction
124 | def is_counter_clockwise(a, b, n):
125 | return dot(a, cross(b, n)) > 0
126 |
127 |
128 | # https://math.stackexchange.com/questions/180418/calculate-rotation-matrix-to-align-vector-a-to-vector-b-in-3d
129 | def frame_to_align_vector_a_to_b(a, b):
130 | v = cross(a, b)
131 | s = length(v)
132 |
133 | # When angle between a and b is zero or 180 degrees
134 | # cross product is 0, R = I
135 | if s == 0.0:
136 | return np.eye(4)
137 | c = dot(a, b)
138 | i = np.eye(3) # Identity matrix 3x3
139 |
140 | # skew symmetric cross product
141 | vx = skew(v)
142 | d = (1 - c) / (s * s)
143 | r = i + vx + np.matmul(vx, vx) * d
144 |
145 | # r00 r01 r02 0
146 | # r10 r11 r12 0
147 | # r20 r21 r22 0
148 | # 0 0 0 1
149 | r = np.hstack((r, [[0], [0], [0]]))
150 | r = np.vstack((r, [0, 0, 0, 1]))
151 | return r
152 |
153 |
154 | # rotate about y, translate in x
155 | def frame_yrotate_xtranslate(theta, x):
156 | c, s = _return_sin_and_cos(theta)
157 |
158 | return np.array([[c, 0, s, x], [0, 1, 0, 0], [-s, 0, c, 0], [0, 0, 0, 1]])
159 |
160 |
161 | # rotate about z, translate in x and y
162 | def frame_zrotate_xytranslate(theta, x, y):
163 | c, s = _return_sin_and_cos(theta)
164 |
165 | return np.array([[c, -s, 0, x], [s, c, 0, y], [0, 0, 1, 0], [0, 0, 0, 1]])
166 |
167 |
168 | def frame_rotxyz(a, b, c):
169 | rx = rotx(a)
170 | ry = roty(b)
171 | rz = rotz(c)
172 | rxy = np.matmul(rx, ry)
173 | rxyz = np.matmul(rxy, rz)
174 | return rxyz
175 |
176 |
177 | def rotx(theta):
178 | c, s = _return_sin_and_cos(theta)
179 | return np.array([[1, 0, 0, 0], [0, c, -s, 0], [0, s, c, 0], [0, 0, 0, 1]])
180 |
181 |
182 | def roty(theta):
183 | c, s = _return_sin_and_cos(theta)
184 | return np.array([[c, 0, s, 0], [0, 1, 0, 0], [-s, 0, c, 0], [0, 0, 0, 1]])
185 |
186 |
187 | def rotz(theta):
188 | c, s = _return_sin_and_cos(theta)
189 | return np.array([[c, -s, 0, 0], [s, c, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1]])
190 |
191 |
192 | def _return_sin_and_cos(theta):
193 | d = radians(theta)
194 | c = cos(d)
195 | s = sin(d)
196 | return c, s
197 |
198 |
199 | # get vector pointing from point a to point b
200 | def vector_from_to(a, b):
201 | return Vector(b.x - a.x, b.y - a.y, b.z - a.z)
202 |
203 |
204 | def scale(v, d):
205 | return Vector(v.x / d, v.y / d, v.z / d)
206 |
207 |
208 | def dot(a, b):
209 | return a.x * b.x + a.y * b.y + a.z * b.z
210 |
211 |
212 | def cross(a, b):
213 | x = a.y * b.z - a.z * b.y
214 | y = a.z * b.x - a.x * b.z
215 | z = a.x * b.y - a.y * b.x
216 | return Vector(x, y, z)
217 |
218 |
219 | def length(v):
220 | return sqrt(dot(v, v))
221 |
222 |
223 | def add_vectors(a, b):
224 | return Vector(a.x + b.x, a.y + b.y, a.z + b.z)
225 |
226 |
227 | def subtract_vectors(a, b):
228 | return Vector(a.x - b.x, a.y - b.y, a.z - b.z)
229 |
230 |
231 | def scalar_multiply(p, s):
232 | return Vector(s * p.x, s * p.y, s * p.z)
233 |
234 |
235 | def get_unit_vector(v):
236 | return scale(v, length(v))
237 |
238 |
239 | def get_normal_given_three_points(a, b, c):
240 | """
241 | Get the unit normal vector to the
242 | plane defined by the points a, b, c.
243 | """
244 | ab = vector_from_to(a, b)
245 | ac = vector_from_to(a, c)
246 | v = cross(ab, ac)
247 | v = scale(v, length(v))
248 | return v
249 |
250 |
251 | def skew(p):
252 | return np.array([[0, -p.z, p.y], [p.z, 0, -p.x], [-p.y, p.x, 0]])
253 |
--------------------------------------------------------------------------------
/hexapod/ik_solver/ik_solver.py:
--------------------------------------------------------------------------------
1 | # Please look at the discussion of the Inverse Kinematics algorithm
2 | # As detailed in the README of this directory
3 |
4 | from copy import deepcopy
5 | import numpy as np
6 | from settings import ASSERTION_ENABLED, ALPHA_MAX_ANGLE
7 | from hexapod.ik_solver.helpers import (
8 | BODY_ON_GROUND_ALERT_MSG,
9 | COXIA_ON_GROUND_ALERT_MSG,
10 | cant_reach_alert_msg,
11 | body_contact_shoved_on_ground,
12 | legs_too_short,
13 | beta_gamma_not_in_range,
14 | angle_above_limit,
15 | might_sanity_leg_lengths_check,
16 | might_sanity_beta_gamma_check,
17 | might_print_ik,
18 | might_print_points,
19 | )
20 | from hexapod.points import (
21 | Vector,
22 | length,
23 | add_vectors,
24 | scalar_multiply,
25 | vector_from_to,
26 | get_unit_vector,
27 | is_triangle,
28 | project_vector_onto_plane,
29 | angle_between,
30 | angle_opposite_of_last_side,
31 | )
32 | from hexapod.ik_solver.shared import (
33 | update_hexapod_points,
34 | find_twist_frame,
35 | compute_twist_wrt_to_world,
36 | )
37 | from hexapod.const import HEXAPOD_POSE
38 |
39 |
40 | # Please checkout the definition of the
41 | # inverse_kinematics_update function
42 | # as described in hexapod.ik_solver.ik_solver2
43 | poses = deepcopy(HEXAPOD_POSE)
44 |
45 |
46 | def inverse_kinematics_update(hexapod, ik_parameters):
47 |
48 | tx = ik_parameters["percent_x"] * hexapod.mid
49 | ty = ik_parameters["percent_y"] * hexapod.side
50 | tz = ik_parameters["percent_z"] * hexapod.tibia
51 | rotx, roty, rotz = (
52 | ik_parameters["rot_x"],
53 | ik_parameters["rot_y"],
54 | ik_parameters["rot_z"],
55 | )
56 |
57 | hexapod.update_stance(ik_parameters["hip_stance"], ik_parameters["leg_stance"])
58 | hexapod.detach_body_rotate_and_translate(rotx, roty, rotz, tx, ty, tz)
59 |
60 | if body_contact_shoved_on_ground(hexapod):
61 | raise Exception(BODY_ON_GROUND_ALERT_MSG)
62 |
63 | x_axis = Vector(1, 0, 0)
64 | legs_up_in_the_air = []
65 |
66 | for i in range(hexapod.LEG_COUNT):
67 | leg_name = hexapod.legs[i].name
68 | body_contact = hexapod.body.vertices[i]
69 | foot_tip = hexapod.legs[i].foot_tip()
70 | body_to_foot_vector = vector_from_to(body_contact, foot_tip)
71 |
72 | # find the coxia vector which is the vector
73 | # from body contact point to joint between coxia and femur limb
74 | projection = project_vector_onto_plane(body_to_foot_vector, hexapod.z_axis)
75 | unit_coxia_vector = get_unit_vector(projection)
76 | coxia_vector = scalar_multiply(unit_coxia_vector, hexapod.coxia)
77 |
78 | # coxia point / joint is the point connecting the coxia and tibia limbs
79 | coxia_point = add_vectors(body_contact, coxia_vector)
80 | if coxia_point.z < foot_tip.z:
81 | raise Exception(COXIA_ON_GROUND_ALERT_MSG)
82 |
83 | # *******************
84 | # 1. Compute p0, p1 and (possible) p3 wrt leg frame
85 | # *******************
86 | p0 = Vector(0, 0, 0)
87 | p1 = Vector(hexapod.coxia, 0, 0)
88 |
89 | # Find p3 aka foot tip (ground contact) with respect to the local leg frame
90 | rho = angle_between(unit_coxia_vector, body_to_foot_vector)
91 | body_to_foot_length = length(body_to_foot_vector)
92 | p3x = body_to_foot_length * np.cos(np.radians(rho))
93 | p3z = -body_to_foot_length * np.sin(np.radians(rho))
94 | p3 = Vector(p3x, 0, p3z)
95 |
96 | # *******************
97 | # 2. Compute p2, beta, gamma and final p3 wrt leg frame
98 | # *******************
99 |
100 | # These values are needed to compute
101 | # p2 aka tibia joint (point between femur limb and tibia limb)
102 | coxia_to_foot_vector2d = vector_from_to(p1, p3)
103 | d = length(coxia_to_foot_vector2d)
104 |
105 | # If we can form this triangle this means
106 | # we can probably can reach the target ground contact point
107 | if is_triangle(hexapod.tibia, hexapod.femur, d):
108 | # .................................
109 | # CASE A: a triangle can be formed with
110 | # coxia to foot vector, hexapod's femur and tibia
111 | # .................................
112 | theta = angle_opposite_of_last_side(d, hexapod.femur, hexapod.tibia)
113 | phi = angle_between(coxia_to_foot_vector2d, x_axis)
114 |
115 | beta = theta - phi # case 1 or 2
116 | if p3.z > 0: # case 3
117 | beta = theta + phi
118 |
119 | z_ = hexapod.femur * np.sin(np.radians(beta))
120 | x_ = p1.x + hexapod.femur * np.cos(np.radians(beta))
121 |
122 | p2 = Vector(x_, 0, z_)
123 | femur_vector = vector_from_to(p1, p2)
124 | tibia_vector = vector_from_to(p2, p3)
125 | gamma = 90 - angle_between(femur_vector, tibia_vector)
126 |
127 | if p2.z < p3.z:
128 | raise Exception(cant_reach_alert_msg(leg_name, "blocking"))
129 | else:
130 | # .................................
131 | # CASE B: It's impossible to reach target ground point
132 | # .................................
133 | if d + hexapod.tibia < hexapod.femur:
134 | raise Exception(cant_reach_alert_msg(leg_name, "femur"))
135 | if d + hexapod.femur < hexapod.tibia:
136 | raise Exception(cant_reach_alert_msg(leg_name, "tibia"))
137 |
138 | # Then hexapod.femur + hexapod.tibia < d:
139 | legs_up_in_the_air.append(leg_name)
140 | LEGS_TOO_SHORT, alert_msg = legs_too_short(legs_up_in_the_air)
141 | if LEGS_TOO_SHORT:
142 | raise Exception(alert_msg)
143 |
144 | femur_tibia_direction = get_unit_vector(coxia_to_foot_vector2d)
145 | femur_vector = scalar_multiply(femur_tibia_direction, hexapod.femur)
146 | p2 = add_vectors(p1, femur_vector)
147 | tibia_vector = scalar_multiply(femur_tibia_direction, hexapod.tibia)
148 | p3 = add_vectors(p2, tibia_vector)
149 |
150 | # Find beta and gamma
151 | gamma = 0.0
152 | leg_x_axis = Vector(1, 0, 0)
153 | beta = angle_between(leg_x_axis, femur_vector)
154 | if femur_vector.z < 0:
155 | beta = -beta
156 |
157 | # Final p1, p2, p3, beta and gamma computed at this point
158 | not_within_range, alert_msg = beta_gamma_not_in_range(beta, gamma, leg_name)
159 | if not_within_range:
160 | raise Exception(alert_msg)
161 |
162 | # *******************
163 | # 3. Compute alpha and twist_frame
164 | # Find frame used to twist the leg frame wrt to hexapod's body contact point's x axis
165 | # *******************
166 | alpha, twist_frame = find_twist_frame(hexapod, unit_coxia_vector)
167 | alpha = compute_twist_wrt_to_world(alpha, hexapod.body.COXIA_AXES[i])
168 | alpha_limit, alert_msg = angle_above_limit(
169 | alpha, ALPHA_MAX_ANGLE, leg_name, "(alpha/coxia)"
170 | )
171 |
172 | if alpha_limit:
173 | raise Exception(alert_msg)
174 |
175 | # *******************
176 | # 4. Update hexapod points and finally update the pose
177 | # *******************
178 | points = [p0, p1, p2, p3]
179 | might_print_points(points, leg_name)
180 |
181 | # Convert points from local leg coordinate frame to world coordinate frame
182 | for point in points:
183 | point.update_point_wrt(twist_frame)
184 | if ASSERTION_ENABLED:
185 | assert hexapod.body_rotation_frame is not None, "No rotation frame!"
186 | point.update_point_wrt(hexapod.body_rotation_frame)
187 | point.move_xyz(body_contact.x, body_contact.y, body_contact.z)
188 |
189 | might_sanity_leg_lengths_check(hexapod, leg_name, points)
190 | might_sanity_beta_gamma_check(beta, gamma, leg_name, points)
191 |
192 | # Update hexapod's points to what we computed
193 | update_hexapod_points(hexapod, i, points)
194 |
195 | poses[i]["coxia"] = alpha
196 | poses[i]["femur"] = beta
197 | poses[i]["tibia"] = gamma
198 |
199 | might_print_ik(poses, ik_parameters, hexapod)
200 | return poses, hexapod
201 |
--------------------------------------------------------------------------------
/hexapod/templates/figure_template.py:
--------------------------------------------------------------------------------
1 | from style_settings import (
2 | BODY_MESH_COLOR,
3 | BODY_MESH_OPACITY,
4 | BODY_COLOR,
5 | BODY_OUTLINE_WIDTH,
6 | COG_COLOR,
7 | COG_SIZE,
8 | HEAD_SIZE,
9 | LEG_COLOR,
10 | LEG_OUTLINE_WIDTH,
11 | SUPPORT_POLYGON_MESH_COLOR,
12 | SUPPORT_POLYGON_MESH_OPACITY,
13 | LEGENDS_BG_COLOR,
14 | AXIS_ZERO_LINE_COLOR,
15 | PAPER_BG_COLOR,
16 | GROUND_COLOR,
17 | LEGEND_FONT_COLOR,
18 | )
19 |
20 | data = [
21 | {
22 | "name": "body mesh",
23 | "showlegend": True,
24 | "type": "mesh3d",
25 | "opacity": BODY_MESH_OPACITY,
26 | "color": BODY_MESH_COLOR,
27 | "uid": "1f821e07-2c02-4a64-8ce3-61ecfe2a91b6",
28 | "x": [100.0, 100.0, -100.0, -100.0, -100.0, 100.0, 100.0],
29 | "y": [0.0, 100.0, 100.0, 0.0, -100.0, -100.0, 0.0],
30 | "z": [100.0, 100.0, 100.0, 100.0, 100.0, 100.0, 100.0],
31 | },
32 | {
33 | "line": {"color": BODY_COLOR, "opacity": 1.0, "width": BODY_OUTLINE_WIDTH},
34 | "name": "body",
35 | "showlegend": True,
36 | "type": "scatter3d",
37 | "uid": "1f821e07-2c02-4a64-8ce3-61ecfe2a91b6",
38 | "x": [100.0, 100.0, -100.0, -100.0, -100.0, 100.0, 100.0],
39 | "y": [0.0, 100.0, 100.0, 0.0, -100.0, -100.0, 0.0],
40 | "z": [100.0, 100.0, 100.0, 100.0, 100.0, 100.0, 100.0],
41 | },
42 | {
43 | "marker": {"color": COG_COLOR, "opacity": 1, "size": COG_SIZE},
44 | "mode": "markers",
45 | "name": "cog",
46 | "type": "scatter3d",
47 | "uid": "a819d0e4-ddaa-476b-b3e4-48fd766e749c",
48 | "x": [0.0],
49 | "y": [0.0],
50 | "z": [100.0],
51 | },
52 | {
53 | "marker": {"color": BODY_COLOR, "opacity": 1.0, "size": HEAD_SIZE},
54 | "mode": "markers",
55 | "name": "head",
56 | "type": "scatter3d",
57 | "uid": "508caa99-c538-4cb6-b022-fbbb31c2350b",
58 | "x": [0.0],
59 | "y": [100.0],
60 | "z": [100.0],
61 | },
62 | {
63 | "line": {"color": LEG_COLOR, "width": LEG_OUTLINE_WIDTH},
64 | "name": "leg 1",
65 | "showlegend": False,
66 | "type": "scatter3d",
67 | "uid": "f217db57-fe6e-4b40-90f8-4e1c20ef595e",
68 | "x": [100.0, 200.0, 300.0, 300.0],
69 | "y": [0.0, 0.0, 0.0, 0.0],
70 | "z": [100.0, 100.0, 100.0, 0.0],
71 | },
72 | {
73 | "line": {"color": LEG_COLOR, "width": LEG_OUTLINE_WIDTH},
74 | "name": "leg 2",
75 | "showlegend": False,
76 | "type": "scatter3d",
77 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
78 | "x": [100.0, 170.71067811865476, 241.4213562373095, 241.4213562373095],
79 | "y": [100.0, 170.71067811865476, 241.42135623730948, 241.42135623730948],
80 | "z": [100.0, 100.0, 100.0, 0.0],
81 | },
82 | {
83 | "line": {"color": LEG_COLOR, "width": LEG_OUTLINE_WIDTH},
84 | "name": "leg 3",
85 | "showlegend": False,
86 | "type": "scatter3d",
87 | "uid": "9f13f416-f2b7-4eb7-993c-1e26e2e7a908",
88 | "x": [-100.0, -170.71067811865476, -241.42135623730948, -241.42135623730948],
89 | "y": [100.0, 170.71067811865476, 241.4213562373095, 241.4213562373095],
90 | "z": [100.0, 100.0, 100.0, 0.0],
91 | },
92 | {
93 | "line": {"color": LEG_COLOR, "width": LEG_OUTLINE_WIDTH},
94 | "name": "leg 4",
95 | "showlegend": False,
96 | "type": "scatter3d",
97 | "uid": "0d426c49-19a4-4051-b938-81b30c962dff",
98 | "x": [-100.0, -200.0, -300.0, -300.0],
99 | "y": [
100 | 0.0,
101 | 1.2246467991473532e-14,
102 | 2.4492935982947064e-14,
103 | 2.4492935982947064e-14,
104 | ],
105 | "z": [100.0, 100.0, 100.0, 0.0],
106 | },
107 | {
108 | "line": {"color": LEG_COLOR, "width": LEG_OUTLINE_WIDTH},
109 | "name": "leg 5",
110 | "showlegend": False,
111 | "type": "scatter3d",
112 | "uid": "5ba25594-2fb5-407e-a16f-118f12769e28",
113 | "x": [-100.0, -170.71067811865476, -241.42135623730954, -241.42135623730954],
114 | "y": [-100.0, -170.71067811865476, -241.42135623730948, -241.42135623730948],
115 | "z": [100.0, 100.0, 100.0, 0.0],
116 | },
117 | {
118 | "line": {"color": LEG_COLOR, "width": LEG_OUTLINE_WIDTH},
119 | "name": "leg 6",
120 | "showlegend": False,
121 | "type": "scatter3d",
122 | "uid": "fa4b5f98-7d68-4eb9-bd38-a6f8dabef8a4",
123 | "x": [100.0, 170.71067811865476, 241.42135623730948, 241.42135623730948],
124 | "y": [-100.0, -170.71067811865476, -241.42135623730954, -241.42135623730954],
125 | "z": [100.0, 100.0, 100.0, 0.0],
126 | },
127 | {
128 | "name": "support polygon mesh",
129 | "showlegend": True,
130 | "type": "mesh3d",
131 | "opacity": SUPPORT_POLYGON_MESH_OPACITY,
132 | "color": SUPPORT_POLYGON_MESH_COLOR,
133 | "uid": "1f821e07-2c02-4a64-8ce3-61ecfe2a91b6",
134 | "x": [
135 | 300.0,
136 | 241.4213562373095,
137 | -241.42135623730948,
138 | -300.0,
139 | -241.42135623730954,
140 | 241.42135623730948,
141 | ],
142 | "y": [
143 | 0.0,
144 | 241.42135623730948,
145 | 241.4213562373095,
146 | 2.4492935982947064e-14,
147 | -241.42135623730948,
148 | -241.42135623730954,
149 | ],
150 | "z": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
151 | },
152 | {
153 | "line": {"color": "#2f3640", "width": 2},
154 | "name": "hexapod x",
155 | "mode": "lines",
156 | "showlegend": False,
157 | "opacity": 1.0,
158 | "type": "scatter3d",
159 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
160 | "x": [0.0, 50.0],
161 | "y": [0.0, 0.0],
162 | "z": [100.0, 100.0],
163 | },
164 | {
165 | "line": {"color": "#e67e22", "width": 2},
166 | "name": "hexapod y",
167 | "mode": "lines",
168 | "showlegend": False,
169 | "opacity": 1.0,
170 | "type": "scatter3d",
171 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
172 | "x": [0.0, 0.0],
173 | "y": [0.0, 50.0],
174 | "z": [100.0, 100.0],
175 | },
176 | {
177 | "line": {"color": "#0097e6", "width": 2},
178 | "name": "hexapod z",
179 | "mode": "lines",
180 | "showlegend": False,
181 | "opacity": 1.0,
182 | "type": "scatter3d",
183 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
184 | "x": [0.0, 0.0],
185 | "y": [0.0, 0.0],
186 | "z": [100.0, 150.0],
187 | },
188 | {
189 | "line": {"color": "#2f3640", "width": 2},
190 | "name": "x direction",
191 | "showlegend": False,
192 | "mode": "lines",
193 | "opacity": 1.0,
194 | "type": "scatter3d",
195 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
196 | "x": [0, 50],
197 | "y": [0, 0],
198 | "z": [0, 0],
199 | },
200 | {
201 | "line": {"color": "#e67e22", "width": 2},
202 | "name": "y direction",
203 | "showlegend": False,
204 | "mode": "lines",
205 | "opacity": 1.0,
206 | "type": "scatter3d",
207 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
208 | "x": [0, 0],
209 | "y": [0, 50],
210 | "z": [0, 0],
211 | },
212 | {
213 | "line": {"color": "#0097e6", "width": 2},
214 | "name": "z direction",
215 | "showlegend": False,
216 | "mode": "lines",
217 | "opacity": 1.0,
218 | "type": "scatter3d",
219 | "uid": "d5690122-cd54-460d-ab3e-1f910eb88f0f",
220 | "x": [0, 0],
221 | "y": [0, 0],
222 | "z": [0, 50],
223 | },
224 | ]
225 |
226 | HEXAPOD_FIGURE = {
227 | "data": data,
228 | "layout": {
229 | "paper_bgcolor": PAPER_BG_COLOR,
230 | "hovermode": "closest",
231 | "legend": {
232 | "x": 0,
233 | "y": 0,
234 | "bgcolor": LEGENDS_BG_COLOR,
235 | "font": {"family": "courier", "size": 12, "color": LEGEND_FONT_COLOR},
236 | },
237 | "margin": {"b": 20, "l": 10, "r": 10, "t": 20},
238 | "scene": {
239 | "aspectmode": "manual",
240 | "aspectratio": {"x": 1, "y": 1, "z": 1},
241 | "camera": {
242 | "center": {
243 | "x": 0.0348603742736399,
244 | "y": 0.16963779995083,
245 | "z": -0.394903376555686,
246 | },
247 | "eye": {
248 | "x": 0.193913968006015,
249 | "y": 0.45997575676993,
250 | "z": -0.111568465000231,
251 | },
252 | "up": {"x": 0, "y": 0, "z": 1},
253 | },
254 | "xaxis": {
255 | "nticks": 1,
256 | "range": [-600, 600],
257 | "zerolinecolor": AXIS_ZERO_LINE_COLOR,
258 | "showbackground": False,
259 | },
260 | "yaxis": {
261 | "nticks": 1,
262 | "range": [-600, 600],
263 | "zerolinecolor": AXIS_ZERO_LINE_COLOR,
264 | "showbackground": False,
265 | },
266 | "zaxis": {
267 | "nticks": 1,
268 | "range": [-600, -10],
269 | "zerolinecolor": AXIS_ZERO_LINE_COLOR,
270 | "showbackground": True,
271 | "backgroundcolor": GROUND_COLOR,
272 | },
273 | },
274 | },
275 | }
276 |
--------------------------------------------------------------------------------
/hexapod/ik_solver/ik_solver2.py:
--------------------------------------------------------------------------------
1 | # Please look at the discussion of the Inverse Kinematics algorithm
2 | # As detailed in the README of this directory
3 | from copy import deepcopy
4 | import numpy as np
5 | from settings import ASSERTION_ENABLED, ALPHA_MAX_ANGLE
6 | from hexapod.ik_solver.helpers import (
7 | BODY_ON_GROUND_ALERT_MSG,
8 | COXIA_ON_GROUND_ALERT_MSG,
9 | cant_reach_alert_msg,
10 | body_contact_shoved_on_ground,
11 | legs_too_short,
12 | beta_gamma_not_in_range,
13 | angle_above_limit,
14 | might_sanity_leg_lengths_check,
15 | might_sanity_beta_gamma_check,
16 | might_print_ik,
17 | might_print_points,
18 | )
19 | from hexapod.points import (
20 | Vector,
21 | length,
22 | add_vectors,
23 | scalar_multiply,
24 | vector_from_to,
25 | get_unit_vector,
26 | is_triangle,
27 | project_vector_onto_plane,
28 | angle_between,
29 | angle_opposite_of_last_side,
30 | )
31 | from hexapod.ik_solver.shared import (
32 | update_hexapod_points,
33 | find_twist_frame,
34 | compute_twist_wrt_to_world,
35 | )
36 | from hexapod.const import HEXAPOD_POSE
37 |
38 | # This function inverse_kinematics_update()
39 | # computes the joint angles required to
40 | # rotate and translate the hexapod given the parameters
41 | # - rot_x, rot_y, rot_z are how the hexapod should be rotated
42 | # - percent_x, percent_y, percent_z are the shifts of the
43 | # center of gravity of the hexapod
44 | #
45 | # The final points of contact by the hexapod and the ground
46 | # are the same as the ground contacts right
47 | # after doing the leg stance and hip stance
48 | # unless the leg can't reach it.
49 | #
50 | # ❗❗❗IMPORTANT: The hexapod will be MODIFIED and returned along with
51 | # a dictionary of POSES containing the 18 computed angles
52 | # if the pose is impossible, this function will raise an error
53 |
54 |
55 | def inverse_kinematics_update(hexapod, ik_parameters):
56 | return IKSolver(hexapod, ik_parameters).pose_and_hexapod()
57 |
58 |
59 | class IKSolver:
60 | __slots__ = [
61 | "hexapod",
62 | "params",
63 | "poses",
64 | "leg_x_axis",
65 | "p0",
66 | "p1",
67 | "p2",
68 | "p3",
69 | "points",
70 | "body_to_foot_vector",
71 | "coxia_vector",
72 | "unit_coxia_vector",
73 | "coxia_to_foot_vector2d",
74 | "d",
75 | "alpha",
76 | "beta",
77 | "gamma",
78 | "leg_name",
79 | "legs_up_in_the_air",
80 | "body_contact",
81 | "foot_tip",
82 | "twist_frame",
83 | ]
84 |
85 | def __init__(self, hexapod, ik_parameters):
86 | self.hexapod = hexapod
87 | self.params = ik_parameters
88 | self.leg_x_axis = Vector(1, 0, 0)
89 | self.update_body_and_ground_contact_points()
90 | self.poses = deepcopy(HEXAPOD_POSE)
91 |
92 | self.legs_up_in_the_air = []
93 | for i in range(hexapod.LEG_COUNT):
94 | self.store_known_points(i)
95 | self.store_initial_vectors()
96 | self.compute_local_p0_p1_p3()
97 | self.compute_beta_gamma_local_p2()
98 | self.compute_alpha_and_twist_frame(i)
99 | self.points = [self.p0, self.p1, self.p2, self.p3]
100 | # Update point wrt world frame
101 | self.update_to_global_points()
102 | # Update hexapod's points to what we computed
103 | update_hexapod_points(self.hexapod, i, self.points)
104 | # Final p1, p2, p3, beta and gamma computed at this point
105 | self.poses[i]["coxia"] = self.alpha
106 | self.poses[i]["femur"] = self.beta
107 | self.poses[i]["tibia"] = self.gamma
108 |
109 | might_print_ik(self.poses, self.params, self.hexapod)
110 |
111 | def pose_and_hexapod(self):
112 | return self.poses, self.hexapod
113 |
114 | def update_body_and_ground_contact_points(self):
115 | tx = self.params["percent_x"] * self.hexapod.mid
116 | ty = self.params["percent_y"] * self.hexapod.side
117 | tz = self.params["percent_z"] * self.hexapod.tibia
118 | rotx, roty, rotz = (
119 | self.params["rot_x"],
120 | self.params["rot_y"],
121 | self.params["rot_z"],
122 | )
123 |
124 | self.hexapod.update_stance(self.params["hip_stance"], self.params["leg_stance"])
125 | self.hexapod.detach_body_rotate_and_translate(rotx, roty, rotz, tx, ty, tz)
126 |
127 | if body_contact_shoved_on_ground(self.hexapod):
128 | raise Exception(BODY_ON_GROUND_ALERT_MSG)
129 |
130 | def store_known_points(self, i):
131 | self.leg_name = self.hexapod.legs[i].name
132 | self.body_contact = self.hexapod.body.vertices[i]
133 | self.foot_tip = self.hexapod.legs[i].foot_tip()
134 |
135 | def store_initial_vectors(self):
136 | self.body_to_foot_vector = vector_from_to(self.body_contact, self.foot_tip)
137 |
138 | # find the coxia vector which is the vector
139 | # from body contact point to joint between coxia and femur limb
140 | projection = project_vector_onto_plane(
141 | self.body_to_foot_vector, self.hexapod.z_axis
142 | )
143 | self.unit_coxia_vector = get_unit_vector(projection)
144 | self.coxia_vector = scalar_multiply(self.unit_coxia_vector, self.hexapod.coxia)
145 |
146 | # coxia point / joint is the point connecting the coxia and tibia limbs
147 | coxia_point = add_vectors(self.body_contact, self.coxia_vector)
148 | if coxia_point.z < self.foot_tip.z:
149 | raise Exception(COXIA_ON_GROUND_ALERT_MSG)
150 |
151 | def compute_local_p0_p1_p3(self):
152 | self.p0 = Vector(0, 0, 0)
153 | self.p1 = Vector(self.hexapod.coxia, 0, 0)
154 |
155 | # Find p3 aka foot tip (ground contact) with respect to the local leg frame
156 | rho = angle_between(self.unit_coxia_vector, self.body_to_foot_vector)
157 | body_to_foot_length = length(self.body_to_foot_vector)
158 | p3x = body_to_foot_length * np.cos(np.radians(rho))
159 | p3z = -body_to_foot_length * np.sin(np.radians(rho))
160 | self.p3 = Vector(p3x, 0, p3z)
161 |
162 | def compute_beta_gamma_local_p2(self):
163 | # These values are needed to compute
164 | # p2 aka tibia joint (point between femur limb and tibia limb)
165 | self.coxia_to_foot_vector2d = vector_from_to(self.p1, self.p3)
166 | self.d = length(self.coxia_to_foot_vector2d)
167 |
168 | # If we can form this triangle
169 | # # this means we probably can reach the target ground contact point
170 | if is_triangle(self.hexapod.tibia, self.hexapod.femur, self.d):
171 | # CASE A: a triangle can be formed with
172 | # coxia to foot vector, hexapod's femur and tibia
173 | self.compute_when_triangle_can_form()
174 | else:
175 | # CASE B: It's impossible to reach target ground point
176 | self.compute_when_triangle_cannot_form()
177 |
178 | not_within_range, alert_msg = beta_gamma_not_in_range(
179 | self.beta, self.gamma, self.leg_name
180 | )
181 | if not_within_range:
182 | raise Exception(alert_msg)
183 |
184 | def compute_when_triangle_can_form(self):
185 | theta = angle_opposite_of_last_side(
186 | self.d, self.hexapod.femur, self.hexapod.tibia
187 | )
188 | phi = angle_between(self.coxia_to_foot_vector2d, self.leg_x_axis)
189 |
190 | self.beta = theta - phi # case 1 or 2
191 | if self.p3.z > 0: # case 3
192 | self.beta = theta + phi
193 |
194 | z_ = self.hexapod.femur * np.sin(np.radians(self.beta))
195 | x_ = self.p1.x + self.hexapod.femur * np.cos(np.radians(self.beta))
196 |
197 | self.p2 = Vector(x_, 0, z_)
198 | femur_vector = vector_from_to(self.p1, self.p2)
199 | tibia_vector = vector_from_to(self.p2, self.p3)
200 | self.gamma = 90 - angle_between(femur_vector, tibia_vector)
201 |
202 | if self.p2.z < self.p3.z:
203 | raise Exception(cant_reach_alert_msg(self.leg_name, "blocking"))
204 |
205 | def might_raise_cant_reach_target(self):
206 | if self.d + self.hexapod.tibia < self.hexapod.femur:
207 | raise Exception(cant_reach_alert_msg(self.leg_name, "femur"))
208 | if self.d + self.hexapod.femur < self.hexapod.tibia:
209 | raise Exception(cant_reach_alert_msg(self.leg_name, "tibia"))
210 |
211 | # Then hexapod.femur + hexapod.tibia < d:
212 | self.legs_up_in_the_air.append(self.leg_name)
213 | LEGS_TOO_SHORT, alert_msg = legs_too_short(self.legs_up_in_the_air)
214 | if LEGS_TOO_SHORT:
215 | raise Exception(alert_msg)
216 |
217 | def only_few_legs_cant_reach_target(self):
218 | # Try to reach it by making the legs stretch
219 | # i.e. p1, p2, p3 are all on the same line
220 | femur_tibia_direction = get_unit_vector(self.coxia_to_foot_vector2d)
221 | femur_vector = scalar_multiply(femur_tibia_direction, self.hexapod.femur)
222 | self.p2 = add_vectors(self.p1, femur_vector)
223 | tibia_vector = scalar_multiply(femur_tibia_direction, self.hexapod.tibia)
224 | self.p3 = add_vectors(self.p2, tibia_vector)
225 |
226 | # Find beta and gamma
227 | self.gamma = 0.0
228 | self.beta = angle_between(self.leg_x_axis, femur_vector)
229 | if femur_vector.z < 0:
230 | self.beta = -self.beta
231 |
232 | def compute_when_triangle_cannot_form(self):
233 | self.might_raise_cant_reach_target()
234 | self.only_few_legs_cant_reach_target()
235 |
236 | def compute_alpha_and_twist_frame(self, i):
237 |
238 | alpha, twist_frame = find_twist_frame(self.hexapod, self.unit_coxia_vector)
239 | alpha = compute_twist_wrt_to_world(alpha, self.hexapod.body.COXIA_AXES[i])
240 |
241 | limit, msg = angle_above_limit(
242 | alpha, ALPHA_MAX_ANGLE, self.leg_name, "(alpha/coxia)"
243 | )
244 | if limit:
245 | raise Exception(msg)
246 |
247 | self.alpha = alpha
248 | self.twist_frame = twist_frame
249 |
250 | def update_to_global_points(self):
251 | might_print_points(self.points, self.leg_name)
252 |
253 | # Convert points from local leg coordinate frame to world coordinate frame
254 | for point in self.points:
255 | point.update_point_wrt(self.twist_frame)
256 | if ASSERTION_ENABLED:
257 | assert (
258 | self.hexapod.body_rotation_frame is not None
259 | ), "No rotation frame!"
260 | point.update_point_wrt(self.hexapod.body_rotation_frame)
261 | point.move_xyz(
262 | self.body_contact.x, self.body_contact.y, self.body_contact.z
263 | )
264 |
265 | might_sanity_leg_lengths_check(self.hexapod, self.leg_name, self.points)
266 | might_sanity_beta_gamma_check(self.beta, self.gamma, self.leg_name, self.points)
267 |
--------------------------------------------------------------------------------
/external_css/dark.css:
--------------------------------------------------------------------------------
1 | .hljs {
2 | background: #222f3e;
3 | color: #32ff7e;
4 | }
5 |
6 | @import url('https://fonts.googleapis.com/css2?family=Libre+Franklin:wght@300&display=swap');
7 |
8 | /* Links
9 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
10 | a {
11 | color: #ef5777;
12 | text-decoration: none;
13 | cursor: pointer;}
14 | a:hover {
15 | color: #ffa801; }
16 |
17 | /* Base Styles
18 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
19 | /* NOTE
20 | html is set to 62.5% so that all the REM measurements throughout Skeleton
21 | are based on 10px sizing. So basically 1.5rem = 15px :) */
22 | html {
23 | font-size: 62.5%; }
24 | body {
25 | font-size: 1.5em; /* currently ems cause chrome bug misinterpreting rems on body element */
26 | line-height: 1.6;
27 | font-weight: 400;
28 | font-family: "Libre Franklin", "HelveticaNeue", "Helvetica Neue", Helvetica, Arial, sans-serif !important;
29 | color: #32ff7e;
30 | background: #222f3e;
31 | }
32 |
33 | /* Table of contents
34 | ––––––––––––––––––––––––––––––––––––––––––––––––––
35 | - Base Styles
36 | - Links
37 | - Plotly.js
38 | - Grid
39 | - Typography
40 | - Buttons
41 | - Forms
42 | - Lists
43 | - Code
44 | - Tables
45 | - Spacing
46 | - Utilities
47 | - Clearing
48 | - Media Queries
49 | */
50 |
51 | /* PLotly.js
52 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
53 | /* plotly.js's modebar's z-index is 1001 by default
54 | * https://github.com/plotly/plotly.js/blob/7e4d8ab164258f6bd48be56589dacd9bdd7fded2/src/css/_modebar.scss#L5
55 | * In case a dropdown is above the graph, the dropdown's options
56 | * will be rendered below the modebar
57 | * Increase the select option's z-index
58 | */
59 |
60 | /* This was actually not quite right -
61 | dropdowns were overlapping each other (edited October 26)
62 |
63 | .Select {
64 | z-index: 1002;
65 | }*/
66 |
67 |
68 | /* Grid
69 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
70 | .container {
71 | position: relative;
72 | width: 100%;
73 | max-width: 960px;
74 | margin: 0 auto;
75 | padding: 0 20px;
76 | box-sizing: border-box; }
77 | .column,
78 | .columns {
79 | width: 100%;
80 | float: left;
81 | box-sizing: border-box; }
82 |
83 | /* For devices larger than 400px */
84 | @media (min-width: 400px) {
85 | .container {
86 | width: 85%;
87 | padding: 0; }
88 | }
89 |
90 | /* For devices larger than 550px */
91 | @media (min-width: 550px) {
92 | .container {
93 | width: 80%; }
94 | .column,
95 | .columns {
96 | margin-left: 4%; }
97 | .column:first-child,
98 | .columns:first-child {
99 | margin-left: 0; }
100 |
101 | .one.column,
102 | .one.columns { width: 4.66666666667%; }
103 | .two.columns { width: 13.3333333333%; }
104 | .three.columns { width: 22%; }
105 | .four.columns { width: 30.6666666667%; }
106 | .five.columns { width: 39.3333333333%; }
107 | .six.columns { width: 48%; }
108 | .seven.columns { width: 56.6666666667%; }
109 | .eight.columns { width: 65.3333333333%; }
110 | .nine.columns { width: 74.0%; }
111 | .ten.columns { width: 82.6666666667%; }
112 | .eleven.columns { width: 91.3333333333%; }
113 | .twelve.columns { width: 100%; margin-left: 0; }
114 |
115 | .one-third.column { width: 30.6666666667%; }
116 | .two-thirds.column { width: 65.3333333333%; }
117 |
118 | .one-half.column { width: 48%; }
119 |
120 | /* Offsets */
121 | .offset-by-one.column,
122 | .offset-by-one.columns { margin-left: 8.66666666667%; }
123 | .offset-by-two.column,
124 | .offset-by-two.columns { margin-left: 17.3333333333%; }
125 | .offset-by-three.column,
126 | .offset-by-three.columns { margin-left: 26%; }
127 | .offset-by-four.column,
128 | .offset-by-four.columns { margin-left: 34.6666666667%; }
129 | .offset-by-five.column,
130 | .offset-by-five.columns { margin-left: 43.3333333333%; }
131 | .offset-by-six.column,
132 | .offset-by-six.columns { margin-left: 52%; }
133 | .offset-by-seven.column,
134 | .offset-by-seven.columns { margin-left: 60.6666666667%; }
135 | .offset-by-eight.column,
136 | .offset-by-eight.columns { margin-left: 69.3333333333%; }
137 | .offset-by-nine.column,
138 | .offset-by-nine.columns { margin-left: 78.0%; }
139 | .offset-by-ten.column,
140 | .offset-by-ten.columns { margin-left: 86.6666666667%; }
141 | .offset-by-eleven.column,
142 | .offset-by-eleven.columns { margin-left: 95.3333333333%; }
143 |
144 | .offset-by-one-third.column,
145 | .offset-by-one-third.columns { margin-left: 34.6666666667%; }
146 | .offset-by-two-thirds.column,
147 | .offset-by-two-thirds.columns { margin-left: 69.3333333333%; }
148 |
149 | .offset-by-one-half.column,
150 | .offset-by-one-half.columns { margin-left: 52%; }
151 |
152 | }
153 |
154 | /* Typography
155 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
156 | h1, h2, h3, h4, h5, h6 {
157 | margin-top: 0;
158 | margin-bottom: 0;
159 | font-weight: 300; }
160 | h1 { font-size: 4.5rem; line-height: 1.2; letter-spacing: -.1rem; margin-bottom: 2rem; }
161 | h2 { font-size: 3.6rem; line-height: 1.25; letter-spacing: -.1rem; margin-bottom: 1.8rem; margin-top: 1.8rem;}
162 | h3 { font-size: 3.0rem; line-height: 1.3; letter-spacing: -.1rem; margin-bottom: 1.5rem; margin-top: 1.5rem;}
163 | h4 { font-size: 2.6rem; line-height: 1.35; letter-spacing: -.08rem; margin-bottom: 1.2rem; margin-top: 1.2rem;}
164 | h5 { font-size: 2.2rem; line-height: 1.5; letter-spacing: -.05rem; margin-bottom: 0.6rem; margin-top: 0.6rem;}
165 | h6 { font-size: 2.0rem; line-height: 1.6; letter-spacing: 0; margin-bottom: 0.75rem; margin-top: 0.75rem;}
166 |
167 | p {
168 | margin-top: 0; }
169 |
170 |
171 | /* Blockquotes
172 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
173 | blockquote {
174 | border-left: 4px lightgrey solid;
175 | padding-left: 1rem;
176 | margin-top: 2rem;
177 | margin-bottom: 2rem;
178 | margin-left: 0rem;
179 | }
180 |
181 |
182 |
183 |
184 |
185 | /* Buttons
186 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
187 | .button,
188 | button,
189 | input[type="submit"],
190 | input[type="reset"],
191 | input[type="button"] {
192 | display: inline-block;
193 | height: 38px;
194 | padding: 0 30px;
195 | color: #555;
196 | text-align: center;
197 | font-size: 11px;
198 | font-weight: 600;
199 | line-height: 38px;
200 | letter-spacing: .1rem;
201 | text-transform: uppercase;
202 | text-decoration: none;
203 | white-space: nowrap;
204 | background-color: transparent;
205 | border-radius: 4px;
206 | border: 1px solid #bbb;
207 | cursor: pointer;
208 | box-sizing: border-box; }
209 | .button:hover,
210 | button:hover,
211 | input[type="submit"]:hover,
212 | input[type="reset"]:hover,
213 | input[type="button"]:hover,
214 | .button:focus,
215 | button:focus,
216 | input[type="submit"]:focus,
217 | input[type="reset"]:focus,
218 | input[type="button"]:focus {
219 | color: #333;
220 | border-color: #888;
221 | outline: 0; }
222 | .button.button-primary,
223 | button.button-primary,
224 | input[type="submit"].button-primary,
225 | input[type="reset"].button-primary,
226 | input[type="button"].button-primary {
227 | color: #FFF;
228 | background-color: #33C3F0;
229 | border-color: #33C3F0; }
230 | .button.button-primary:hover,
231 | button.button-primary:hover,
232 | input[type="submit"].button-primary:hover,
233 | input[type="reset"].button-primary:hover,
234 | input[type="button"].button-primary:hover,
235 | .button.button-primary:focus,
236 | button.button-primary:focus,
237 | input[type="submit"].button-primary:focus,
238 | input[type="reset"].button-primary:focus,
239 | input[type="button"].button-primary:focus {
240 | color: #FFF;
241 | background-color: #1EAEDB;
242 | border-color: #1EAEDB; }
243 |
244 |
245 | /* Forms
246 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
247 | input[type="email"],
248 | input[type="number"],
249 | input[type="search"],
250 | input[type="text"],
251 | input[type="tel"],
252 | input[type="url"],
253 | input[type="password"],
254 | textarea,
255 | select {
256 | height: 38px;
257 | padding: 6px 10px; /* The 6px vertically centers text on FF, ignored by Webkit */
258 | background-color: #fff;
259 | border: 1px solid #D1D1D1;
260 | border-radius: 4px;
261 | box-shadow: none;
262 | box-sizing: border-box;
263 | font-family: inherit;
264 | font-size: inherit; /*https://stackoverflow.com/questions/6080413/why-doesnt-input-inherit-the-font-from-body*/}
265 | /* Removes awkward default styles on some inputs for iOS */
266 | input[type="email"],
267 | input[type="number"],
268 | input[type="search"],
269 | input[type="text"],
270 | input[type="tel"],
271 | input[type="url"],
272 | input[type="password"],
273 | textarea {
274 | -webkit-appearance: none;
275 | -moz-appearance: none;
276 | appearance: none; }
277 | textarea {
278 | min-height: 65px;
279 | padding-top: 6px;
280 | padding-bottom: 6px; }
281 | input[type="email"]:focus,
282 | input[type="number"]:focus,
283 | input[type="search"]:focus,
284 | input[type="text"]:focus,
285 | input[type="tel"]:focus,
286 | input[type="url"]:focus,
287 | input[type="password"]:focus,
288 | textarea:focus,
289 | select:focus {
290 | border: 1px solid #33C3F0;
291 | outline: 0; }
292 | label,
293 | legend {
294 | display: block;
295 | margin-bottom: 0px; }
296 | fieldset {
297 | padding: 0;
298 | border-width: 0; }
299 | input[type="checkbox"],
300 | input[type="radio"] {
301 | display: inline; }
302 | label > .label-body {
303 | display: inline-block;
304 | margin-left: .5rem;
305 | font-weight: normal; }
306 |
307 |
308 | /* Lists
309 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
310 | ul {
311 | list-style: circle inside; }
312 | ol {
313 | list-style: decimal inside; }
314 | ol, ul {
315 | padding-left: 0;
316 | margin-top: 0; }
317 | ul ul,
318 | ul ol,
319 | ol ol,
320 | ol ul {
321 | margin: 1.5rem 0 1.5rem 3rem;
322 | font-size: 90%; }
323 | li {
324 | margin-bottom: 1rem; }
325 |
326 |
327 | /* Tables
328 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
329 | table {
330 | border-collapse: collapse;
331 | }
332 | th:not(.CalendarDay),
333 | td:not(.CalendarDay) {
334 | padding: 12px 15px;
335 | text-align: left;
336 | border-bottom: 1px solid #E1E1E1; }
337 | th:first-child:not(.CalendarDay),
338 | td:first-child:not(.CalendarDay) {
339 | padding-left: 0; }
340 | th:last-child:not(.CalendarDay),
341 | td:last-child:not(.CalendarDay) {
342 | padding-right: 0; }
343 |
344 |
345 | /* Spacing
346 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
347 | button,
348 | .button {
349 | margin-bottom: 0rem; }
350 | input,
351 | textarea,
352 | select,
353 | fieldset {
354 | margin-bottom: 0rem; }
355 | pre,
356 | dl,
357 | figure,
358 | table,
359 | form {
360 | margin-bottom: 0rem; }
361 | p,
362 | ul,
363 | ol {
364 | margin-bottom: 0.75rem; }
365 |
366 | /* Utilities
367 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
368 | .u-full-width {
369 | width: 100%;
370 | box-sizing: border-box; }
371 | .u-max-full-width {
372 | max-width: 100%;
373 | box-sizing: border-box; }
374 | .u-pull-right {
375 | float: right; }
376 | .u-pull-left {
377 | float: left; }
378 |
379 |
380 | /* Misc
381 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
382 | hr {
383 | margin-top: 3rem;
384 | margin-bottom: 3.5rem;
385 | border-width: 0;
386 | border-top: 1px solid #E1E1E1; }
387 |
388 |
389 | /* Clearing
390 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
391 |
392 | /* Self Clearing Goodness */
393 | .container:after,
394 | .row:after,
395 | .u-cf {
396 | content: "";
397 | display: table;
398 | clear: both; }
399 |
400 |
401 | /* Media Queries
402 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
403 | /*
404 | Note: The best way to structure the use of media queries is to create the queries
405 | near the relevant code. For example, if you wanted to change the styles for buttons
406 | on small devices, paste the mobile query code up in the buttons section and style it
407 | there.
408 | */
409 |
410 |
411 | /* Larger than mobile */
412 | @media (min-width: 400px) {}
413 |
414 | /* Larger than phablet (also point when grid becomes active) */
415 | @media (min-width: 550px) {}
416 |
417 | /* Larger than tablet */
418 | @media (min-width: 750px) {}
419 |
420 | /* Larger than desktop */
421 | @media (min-width: 1000px) {}
422 |
423 | /* Larger than Desktop HD */
424 | @media (min-width: 1200px) {}
--------------------------------------------------------------------------------
/external_css/light.css:
--------------------------------------------------------------------------------
1 | @import url('https://fonts.googleapis.com/css2?family=Libre+Franklin:wght@300&display=swap');
2 |
3 | .hljs {
4 | background: #ffffff;
5 | color: #2c3e50;
6 | }
7 |
8 | /* Links
9 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
10 | a {
11 | color: #ef5777;
12 | text-decoration: none;
13 | cursor: pointer;}
14 | a:hover {
15 | color: #ffa801; }
16 |
17 | /* Base Styles
18 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
19 | /* NOTE
20 | html is set to 62.5% so that all the REM measurements throughout Skeleton
21 | are based on 10px sizing. So basically 1.5rem = 15px :) */
22 | html {
23 | font-size: 62.5%; }
24 | body {
25 | font-size: 1.5em; /* currently ems cause chrome bug misinterpreting rems on body element */
26 | line-height: 1.6;
27 | font-weight: 400;
28 | font-family: "Libre Franklin", "HelveticaNeue", "Helvetica Neue", Helvetica, Arial, sans-serif !important;
29 | color: rgb(50, 50, 50);
30 | background: #FFFFFF;
31 | }
32 |
33 | /* Table of contents
34 | ––––––––––––––––––––––––––––––––––––––––––––––––––
35 | - Base Styles
36 | - Links
37 | - Plotly.js
38 | - Grid
39 | - Typography
40 | - Buttons
41 | - Forms
42 | - Lists
43 | - Code
44 | - Tables
45 | - Spacing
46 | - Utilities
47 | - Clearing
48 | - Media Queries
49 | */
50 |
51 | /* PLotly.js
52 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
53 | /* plotly.js's modebar's z-index is 1001 by default
54 | * https://github.com/plotly/plotly.js/blob/7e4d8ab164258f6bd48be56589dacd9bdd7fded2/src/css/_modebar.scss#L5
55 | * In case a dropdown is above the graph, the dropdown's options
56 | * will be rendered below the modebar
57 | * Increase the select option's z-index
58 | */
59 |
60 | /* This was actually not quite right -
61 | dropdowns were overlapping each other (edited October 26)
62 |
63 | .Select {
64 | z-index: 1002;
65 | }*/
66 |
67 |
68 | /* Grid
69 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
70 | .container {
71 | position: relative;
72 | width: 100%;
73 | max-width: 960px;
74 | margin: 0 auto;
75 | padding: 0 20px;
76 | box-sizing: border-box; }
77 | .column,
78 | .columns {
79 | width: 100%;
80 | float: left;
81 | box-sizing: border-box; }
82 |
83 | /* For devices larger than 400px */
84 | @media (min-width: 400px) {
85 | .container {
86 | width: 85%;
87 | padding: 0; }
88 | }
89 |
90 | /* For devices larger than 550px */
91 | @media (min-width: 550px) {
92 | .container {
93 | width: 80%; }
94 | .column,
95 | .columns {
96 | margin-left: 4%; }
97 | .column:first-child,
98 | .columns:first-child {
99 | margin-left: 0; }
100 |
101 | .one.column,
102 | .one.columns { width: 4.66666666667%; }
103 | .two.columns { width: 13.3333333333%; }
104 | .three.columns { width: 22%; }
105 | .four.columns { width: 30.6666666667%; }
106 | .five.columns { width: 39.3333333333%; }
107 | .six.columns { width: 48%; }
108 | .seven.columns { width: 56.6666666667%; }
109 | .eight.columns { width: 65.3333333333%; }
110 | .nine.columns { width: 74.0%; }
111 | .ten.columns { width: 82.6666666667%; }
112 | .eleven.columns { width: 91.3333333333%; }
113 | .twelve.columns { width: 100%; margin-left: 0; }
114 |
115 | .one-third.column { width: 30.6666666667%; }
116 | .two-thirds.column { width: 65.3333333333%; }
117 |
118 | .one-half.column { width: 48%; }
119 |
120 | /* Offsets */
121 | .offset-by-one.column,
122 | .offset-by-one.columns { margin-left: 8.66666666667%; }
123 | .offset-by-two.column,
124 | .offset-by-two.columns { margin-left: 17.3333333333%; }
125 | .offset-by-three.column,
126 | .offset-by-three.columns { margin-left: 26%; }
127 | .offset-by-four.column,
128 | .offset-by-four.columns { margin-left: 34.6666666667%; }
129 | .offset-by-five.column,
130 | .offset-by-five.columns { margin-left: 43.3333333333%; }
131 | .offset-by-six.column,
132 | .offset-by-six.columns { margin-left: 52%; }
133 | .offset-by-seven.column,
134 | .offset-by-seven.columns { margin-left: 60.6666666667%; }
135 | .offset-by-eight.column,
136 | .offset-by-eight.columns { margin-left: 69.3333333333%; }
137 | .offset-by-nine.column,
138 | .offset-by-nine.columns { margin-left: 78.0%; }
139 | .offset-by-ten.column,
140 | .offset-by-ten.columns { margin-left: 86.6666666667%; }
141 | .offset-by-eleven.column,
142 | .offset-by-eleven.columns { margin-left: 95.3333333333%; }
143 |
144 | .offset-by-one-third.column,
145 | .offset-by-one-third.columns { margin-left: 34.6666666667%; }
146 | .offset-by-two-thirds.column,
147 | .offset-by-two-thirds.columns { margin-left: 69.3333333333%; }
148 |
149 | .offset-by-one-half.column,
150 | .offset-by-one-half.columns { margin-left: 52%; }
151 |
152 | }
153 |
154 | /* Typography
155 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
156 | h1, h2, h3, h4, h5, h6 {
157 | margin-top: 0;
158 | margin-bottom: 0;
159 | font-weight: 300; }
160 | h1 { font-size: 4.5rem; line-height: 1.2; letter-spacing: -.1rem; margin-bottom: 2rem; }
161 | h2 { font-size: 3.6rem; line-height: 1.25; letter-spacing: -.1rem; margin-bottom: 1.8rem; margin-top: 1.8rem;}
162 | h3 { font-size: 3.0rem; line-height: 1.3; letter-spacing: -.1rem; margin-bottom: 1.5rem; margin-top: 1.5rem;}
163 | h4 { font-size: 2.6rem; line-height: 1.35; letter-spacing: -.08rem; margin-bottom: 1.2rem; margin-top: 1.2rem;}
164 | h5 { font-size: 2.2rem; line-height: 1.5; letter-spacing: -.05rem; margin-bottom: 0.6rem; margin-top: 0.6rem;}
165 | h6 { font-size: 2.0rem; line-height: 1.6; letter-spacing: 0; margin-bottom: 0.75rem; margin-top: 0.75rem;}
166 |
167 | p {
168 | margin-top: 0; }
169 |
170 |
171 | /* Blockquotes
172 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
173 | blockquote {
174 | border-left: 4px lightgrey solid;
175 | padding-left: 1rem;
176 | margin-top: 2rem;
177 | margin-bottom: 2rem;
178 | margin-left: 0rem;
179 | }
180 |
181 |
182 |
183 |
184 |
185 | /* Buttons
186 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
187 | .button,
188 | button,
189 | input[type="submit"],
190 | input[type="reset"],
191 | input[type="button"] {
192 | display: inline-block;
193 | height: 38px;
194 | padding: 0 30px;
195 | color: #555;
196 | text-align: center;
197 | font-size: 11px;
198 | font-weight: 600;
199 | line-height: 38px;
200 | letter-spacing: .1rem;
201 | text-transform: uppercase;
202 | text-decoration: none;
203 | white-space: nowrap;
204 | background-color: transparent;
205 | border-radius: 4px;
206 | border: 1px solid #bbb;
207 | cursor: pointer;
208 | box-sizing: border-box; }
209 | .button:hover,
210 | button:hover,
211 | input[type="submit"]:hover,
212 | input[type="reset"]:hover,
213 | input[type="button"]:hover,
214 | .button:focus,
215 | button:focus,
216 | input[type="submit"]:focus,
217 | input[type="reset"]:focus,
218 | input[type="button"]:focus {
219 | color: #333;
220 | border-color: #888;
221 | outline: 0; }
222 | .button.button-primary,
223 | button.button-primary,
224 | input[type="submit"].button-primary,
225 | input[type="reset"].button-primary,
226 | input[type="button"].button-primary {
227 | color: #FFF;
228 | background-color: #33C3F0;
229 | border-color: #33C3F0; }
230 | .button.button-primary:hover,
231 | button.button-primary:hover,
232 | input[type="submit"].button-primary:hover,
233 | input[type="reset"].button-primary:hover,
234 | input[type="button"].button-primary:hover,
235 | .button.button-primary:focus,
236 | button.button-primary:focus,
237 | input[type="submit"].button-primary:focus,
238 | input[type="reset"].button-primary:focus,
239 | input[type="button"].button-primary:focus {
240 | color: #FFF;
241 | background-color: #1EAEDB;
242 | border-color: #1EAEDB; }
243 |
244 |
245 | /* Forms
246 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
247 | input[type="email"],
248 | input[type="number"],
249 | input[type="search"],
250 | input[type="text"],
251 | input[type="tel"],
252 | input[type="url"],
253 | input[type="password"],
254 | textarea,
255 | select {
256 | height: 38px;
257 | padding: 6px 10px; /* The 6px vertically centers text on FF, ignored by Webkit */
258 | background-color: #fff;
259 | border: 1px solid #D1D1D1;
260 | border-radius: 4px;
261 | box-shadow: none;
262 | box-sizing: border-box;
263 | font-family: inherit;
264 | font-size: inherit; /*https://stackoverflow.com/questions/6080413/why-doesnt-input-inherit-the-font-from-body*/}
265 | /* Removes awkward default styles on some inputs for iOS */
266 | input[type="email"],
267 | input[type="number"],
268 | input[type="search"],
269 | input[type="text"],
270 | input[type="tel"],
271 | input[type="url"],
272 | input[type="password"],
273 | textarea {
274 | -webkit-appearance: none;
275 | -moz-appearance: none;
276 | appearance: none; }
277 | textarea {
278 | min-height: 65px;
279 | padding-top: 6px;
280 | padding-bottom: 6px; }
281 | input[type="email"]:focus,
282 | input[type="number"]:focus,
283 | input[type="search"]:focus,
284 | input[type="text"]:focus,
285 | input[type="tel"]:focus,
286 | input[type="url"]:focus,
287 | input[type="password"]:focus,
288 | textarea:focus,
289 | select:focus {
290 | border: 1px solid #33C3F0;
291 | outline: 0; }
292 | label,
293 | legend {
294 | display: block;
295 | margin-bottom: 0px; }
296 | fieldset {
297 | padding: 0;
298 | border-width: 0; }
299 | input[type="checkbox"],
300 | input[type="radio"] {
301 | display: inline; }
302 | label > .label-body {
303 | display: inline-block;
304 | margin-left: .5rem;
305 | font-weight: normal; }
306 |
307 |
308 | /* Lists
309 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
310 | ul {
311 | list-style: circle inside; }
312 | ol {
313 | list-style: decimal inside; }
314 | ol, ul {
315 | padding-left: 0;
316 | margin-top: 0; }
317 | ul ul,
318 | ul ol,
319 | ol ol,
320 | ol ul {
321 | margin: 1.5rem 0 1.5rem 3rem;
322 | font-size: 90%; }
323 | li {
324 | margin-bottom: 1rem; }
325 |
326 |
327 | /* Tables
328 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
329 | table {
330 | border-collapse: collapse;
331 | }
332 | th:not(.CalendarDay),
333 | td:not(.CalendarDay) {
334 | padding: 12px 15px;
335 | text-align: left;
336 | border-bottom: 1px solid #E1E1E1; }
337 | th:first-child:not(.CalendarDay),
338 | td:first-child:not(.CalendarDay) {
339 | padding-left: 0; }
340 | th:last-child:not(.CalendarDay),
341 | td:last-child:not(.CalendarDay) {
342 | padding-right: 0; }
343 |
344 |
345 | /* Spacing
346 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
347 | button,
348 | .button {
349 | margin-bottom: 0rem; }
350 | input,
351 | textarea,
352 | select,
353 | fieldset {
354 | margin-bottom: 0rem; }
355 | pre,
356 | dl,
357 | figure,
358 | table,
359 | form {
360 | margin-bottom: 0rem; }
361 | p,
362 | ul,
363 | ol {
364 | margin-bottom: 0.75rem; }
365 |
366 | /* Utilities
367 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
368 | .u-full-width {
369 | width: 100%;
370 | box-sizing: border-box; }
371 | .u-max-full-width {
372 | max-width: 100%;
373 | box-sizing: border-box; }
374 | .u-pull-right {
375 | float: right; }
376 | .u-pull-left {
377 | float: left; }
378 |
379 |
380 | /* Misc
381 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
382 | hr {
383 | margin-top: 3rem;
384 | margin-bottom: 3.5rem;
385 | border-width: 0;
386 | border-top: 1px solid #E1E1E1; }
387 |
388 |
389 | /* Clearing
390 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
391 |
392 | /* Self Clearing Goodness */
393 | .container:after,
394 | .row:after,
395 | .u-cf {
396 | content: "";
397 | display: table;
398 | clear: both; }
399 |
400 |
401 | /* Media Queries
402 | –––––––––––––––––––––––––––––––––––––––––––––––––– */
403 | /*
404 | Note: The best way to structure the use of media queries is to create the queries
405 | near the relevant code. For example, if you wanted to change the styles for buttons
406 | on small devices, paste the mobile query code up in the buttons section and style it
407 | there.
408 | */
409 |
410 |
411 | /* Larger than mobile */
412 | @media (min-width: 400px) {}
413 |
414 | /* Larger than phablet (also point when grid becomes active) */
415 | @media (min-width: 550px) {}
416 |
417 | /* Larger than tablet */
418 | @media (min-width: 750px) {}
419 |
420 | /* Larger than desktop */
421 | @media (min-width: 1000px) {}
422 |
423 | /* Larger than Desktop HD */
424 | @media (min-width: 1200px) {}
--------------------------------------------------------------------------------
/hexapod/models.py:
--------------------------------------------------------------------------------
1 | # This module contains the model of a hexapod
2 | # It's used to manipulate the pose of the hexapod
3 | from copy import deepcopy
4 | from pprint import pprint
5 | from math import atan2, degrees, isclose
6 | import json
7 | import numpy as np
8 | from settings import PRINT_MODEL_ON_UPDATE, ALPHA_MAX_ANGLE, BETA_MAX_ANGLE, GAMMA_MAX_ANGLE
9 | from hexapod.linkage import Linkage
10 | import hexapod.ground_contact_solver.ground_contact_solver as gc
11 | import hexapod.ground_contact_solver.ground_contact_solver2 as gc2
12 |
13 | from hexapod.templates.pose_template import HEXAPOD_POSE
14 | from hexapod.points import (
15 | Vector,
16 | frame_to_align_vector_a_to_b,
17 | frame_rotxyz,
18 | rotz,
19 | )
20 |
21 |
22 | # Dimensions f, s, and m
23 | #
24 | # |-f-|
25 | # *---*---*--------
26 | # / | \ |
27 | # / | \ s
28 | # / | \ |
29 | # *------cog------* ---
30 | # \ | /|
31 | # \ | / |
32 | # \ | / |
33 | # *---*---* |
34 | # | |
35 | # |---m---|
36 | #
37 | # y axis
38 | # ^
39 | # |
40 | # |
41 | # ----> x axis
42 | # cog (origin)
43 | #
44 | #
45 | # Relative x-axis, for each attached linkage
46 | #
47 | # x2 x1
48 | # \ /
49 | # *---*---*
50 | # / | \
51 | # / | \
52 | # / | \
53 | # x3 --*------cog------*-- x0
54 | # \ | /
55 | # \ | /
56 | # \ | /
57 | # *---*---*
58 | # / \
59 | # x4 x5
60 | #
61 | class Hexagon:
62 | VERTEX_NAMES = (
63 | "right-middle",
64 | "right-front",
65 | "left-front",
66 | "left-middle",
67 | "left-back",
68 | "right-back",
69 | )
70 | COXIA_AXES = (0, 45, 135, 180, 225, 315)
71 | __slots__ = ("f", "m", "s", "cog", "head", "vertices", "all_points")
72 |
73 | def __init__(self, f, m, s):
74 | self.f = f
75 | self.m = m
76 | self.s = s
77 |
78 | self.cog = Vector(0, 0, 0, name="center-of-gravity")
79 | self.head = Vector(0, s, 0, name="head")
80 | self.vertices = [
81 | Vector(m, 0, 0, name=Hexagon.VERTEX_NAMES[0]),
82 | Vector(f, s, 0, name=Hexagon.VERTEX_NAMES[1]),
83 | Vector(-f, s, 0, name=Hexagon.VERTEX_NAMES[2]),
84 | Vector(-m, 0, 0, name=Hexagon.VERTEX_NAMES[3]),
85 | Vector(-f, -s, 0, name=Hexagon.VERTEX_NAMES[4]),
86 | Vector(f, -s, 0, name=Hexagon.VERTEX_NAMES[5]),
87 | ]
88 |
89 | self.all_points = self.vertices + [self.cog, self.head]
90 |
91 |
92 | # ..........................................
93 | # The hexapod model
94 | # ..........................................
95 | class VirtualHexapod:
96 | LEG_COUNT = 6
97 | __slots__ = (
98 | "body",
99 | "legs",
100 | "dimensions",
101 | "coxia",
102 | "femur",
103 | "tibia",
104 | "front",
105 | "side",
106 | "mid",
107 | "body_rotation_frame",
108 | "ground_contacts",
109 | "x_axis",
110 | "y_axis",
111 | "z_axis",
112 | )
113 |
114 | def __init__(self, dimensions):
115 | self._store_attributes(dimensions)
116 | self._init_legs()
117 | self._init_local_frame()
118 |
119 | def update(self, poses, assume_ground_targets=True):
120 | might_raise_poses_range_error(poses)
121 |
122 | self.body_rotation_frame = None
123 | might_twist = find_if_might_twist(self, poses)
124 | old_contacts = deepcopy(self.ground_contacts)
125 |
126 | # Update leg poses
127 | for pose in poses.values():
128 | i = pose["id"]
129 | self.legs[i].change_pose(pose["coxia"], pose["femur"], pose["tibia"])
130 |
131 | # Find new orientation of the body (new normal)
132 | # distance of cog from ground and which legs are on the ground
133 | if assume_ground_targets:
134 | # We are positive that our assumed target ground contact points
135 | # are correct then we don't have to test all possible cases
136 | legs, n_axis, height = gc.compute_orientation_properties(self.legs)
137 | else:
138 | legs, n_axis, height = gc2.compute_orientation_properties(self.legs)
139 |
140 | if n_axis is None:
141 | raise Exception("❗Pose Unstable. COG not inside support polygon.")
142 |
143 | # Tilt and shift the hexapod based on new normal
144 | frame = frame_to_align_vector_a_to_b(n_axis, Vector(0, 0, 1))
145 | self.rotate_and_shift(frame, height)
146 | self._update_local_frame(frame)
147 |
148 | # Twist around the new normal if you have to
149 | self.ground_contacts = [leg.ground_contact() for leg in legs]
150 |
151 | if might_twist:
152 | twist_frame = find_twist_frame(old_contacts, self.ground_contacts)
153 | self.rotate_and_shift(twist_frame)
154 |
155 | might_print_hexapod(self, poses)
156 |
157 | def detach_body_rotate_and_translate(self, rx, ry, rz, tx, ty, tz):
158 | # Detach the body of the hexapod from the legs
159 | # then rotate and translate body as if a separate entity
160 | frame = frame_rotxyz(rx, ry, rz)
161 | self.body_rotation_frame = frame
162 |
163 | for point in self.body.all_points:
164 | point.update_point_wrt(frame)
165 | point.move_xyz(tx, ty, tz)
166 |
167 | self._update_local_frame(frame)
168 |
169 | def move_xyz(self, tx, ty, tz):
170 | for point in self.body.all_points:
171 | point.move_xyz(tx, ty, tz)
172 |
173 | for leg in self.legs:
174 | for point in leg.all_points:
175 | point.move_xyz(tx, ty, tz)
176 |
177 | def update_stance(self, hip_stance, leg_stance):
178 | pose = deepcopy(HEXAPOD_POSE)
179 | pose[1]["coxia"] = -hip_stance # right_front
180 | pose[2]["coxia"] = hip_stance # left_front
181 | pose[4]["coxia"] = -hip_stance # left_back
182 | pose[5]["coxia"] = hip_stance # right_back
183 |
184 | for leg in pose.values():
185 | leg["femur"] = leg_stance
186 | leg["tibia"] = -leg_stance
187 |
188 | self.update(pose)
189 |
190 | def sum_of_dimensions(self):
191 | f, m, s = self.front, self.mid, self.side
192 | a, b, c = self.coxia, self.femur, self.tibia
193 | return f + m + s + a + b + c
194 |
195 | def _store_attributes(self, dimensions):
196 | self.body_rotation_frame = None
197 | self.dimensions = dimensions
198 | self.coxia = dimensions["coxia"]
199 | self.femur = dimensions["femur"]
200 | self.tibia = dimensions["tibia"]
201 | self.front = dimensions["front"]
202 | self.mid = dimensions["middle"]
203 | self.side = dimensions["side"]
204 | self.body = Hexagon(self.front, self.mid, self.side)
205 |
206 | def _init_legs(self):
207 | self.legs = []
208 | for i in range(VirtualHexapod.LEG_COUNT):
209 | linkage = Linkage(
210 | self.coxia,
211 | self.femur,
212 | self.tibia,
213 | coxia_axis=Hexagon.COXIA_AXES[i],
214 | new_origin=self.body.vertices[i],
215 | name=Hexagon.VERTEX_NAMES[i],
216 | id_number=i,
217 | )
218 | self.legs.append(linkage)
219 |
220 | self.ground_contacts = [leg.ground_contact() for leg in self.legs]
221 |
222 | def rotate_and_shift(self, frame, height=0):
223 | for vertex in self.body.all_points:
224 | vertex.update_point_wrt(frame, height)
225 |
226 | for leg in self.legs:
227 | leg.update_leg_wrt(frame, height)
228 |
229 | def _init_local_frame(self):
230 | self.x_axis = Vector(1, 0, 0, name="hexapod x axis")
231 | self.y_axis = Vector(0, 1, 0, name="hexapod y axis")
232 | self.z_axis = Vector(0, 0, 1, name="hexapod z axis")
233 |
234 | def _update_local_frame(self, frame):
235 | # Update the x, y, z axis centered at cog of hexapod
236 | self.x_axis.update_point_wrt(frame)
237 | self.y_axis.update_point_wrt(frame)
238 | self.z_axis.update_point_wrt(frame)
239 |
240 |
241 | # ..........................................
242 | # Helper functions
243 | # ..........................................
244 |
245 | def might_raise_poses_range_error(poses):
246 | angle_limits = {
247 | "coxia": ALPHA_MAX_ANGLE,
248 | "femur": BETA_MAX_ANGLE,
249 | "tibia": GAMMA_MAX_ANGLE,
250 | }
251 |
252 | def _within_range(angle, max_angle):
253 | return -max_angle <= angle <= max_angle
254 |
255 | def _raise_range_error(leg_name, joint_name, angle, max_angle):
256 | identifier = f"{leg_name} leg's {joint_name} angle is {angle}"
257 | msg = f"{identifier}. Must be within [-{max_angle}, {max_angle}]"
258 | raise Exception(msg)
259 |
260 | for pose in poses.values():
261 | for joint_name in angle_limits:
262 |
263 | angle = pose[joint_name]
264 | max_angle = angle_limits[joint_name]
265 |
266 | if _within_range(angle, max_angle):
267 | continue
268 |
269 | _raise_range_error(pose["name"], joint_name, angle, max_angle)
270 |
271 |
272 | def get_hip_angle(leg_id, poses):
273 | if leg_id in poses:
274 | return poses[leg_id]["coxia"]
275 |
276 | if str(leg_id) in poses:
277 | return poses[str(leg_id)]["coxia"]
278 |
279 | # ❗Error will silently pass, is this ok?
280 | return 0.0
281 |
282 |
283 | def find_if_might_twist(hexapod, poses):
284 | # The hexapod will only definitely NOT twist
285 | # if only two of the legs that's currently on the ground
286 | # has twisted its hips/coxia
287 | # i.e. only 2 legs with ground contact points have changed their alpha angles
288 | # i.e. we don't care if the legs which are not on the ground twisted its hips
289 | def _find_leg_id(leg_point):
290 | right_or_left, front_mid_or_back, _ = leg_point.name.split("-")
291 | leg_placement = right_or_left + "-" + front_mid_or_back
292 | return Hexagon.VERTEX_NAMES.index(leg_placement)
293 |
294 | did_change_count = 0
295 |
296 | for leg_point in hexapod.ground_contacts:
297 | leg_id = _find_leg_id(leg_point)
298 | old_hip_angle = hexapod.legs[leg_id].coxia_angle()
299 | new_hip_angle = get_hip_angle(leg_id, poses)
300 | if not isclose(old_hip_angle, new_hip_angle):
301 | did_change_count += 1
302 | if did_change_count >= 3:
303 | return True
304 |
305 | return False
306 |
307 |
308 | def find_twist_frame(old_ground_contacts, new_ground_contacts):
309 | # This is the frame used to twist the model about the z axis
310 |
311 | def _make_contact_dict(contact_list):
312 | return {leg_point.name: leg_point for leg_point in contact_list}
313 |
314 | def _twist(v1, v2):
315 | # https://www.euclideanspace.com/maths/algebra/vectors/angleBetween/
316 | theta = atan2(v2.y, v2.x) - atan2(v1.y, v1.x)
317 | return rotz(degrees(theta))
318 |
319 | # Make dictionary mapping contact point name and leg_contact_point
320 | old_contacts = _make_contact_dict(old_ground_contacts)
321 | new_contacts = _make_contact_dict(new_ground_contacts)
322 |
323 | # Find at least one point that's the same
324 | same_point_name = None
325 | for key in old_contacts:
326 | if key in new_contacts:
327 | same_point_name = key
328 | break
329 |
330 | # We don't know how to rotate if we don't
331 | # know at least one point that's on the ground
332 | # before and after the movement,
333 | # so we assume that the hexapod didn't move
334 | if same_point_name is None:
335 | return np.eye(4)
336 |
337 | old = old_contacts[same_point_name]
338 | new = new_contacts[same_point_name]
339 |
340 | # Get the projection of these points in the ground
341 | old_vector = Vector(old.x, old.y, 0)
342 | new_vector = Vector(new.x, new.y, 0)
343 |
344 | twist_frame = _twist(new_vector, old_vector)
345 |
346 | # ❗IMPORTANT: We are assuming that because the point
347 | # is on the ground before and after
348 | # They should be at the same point after movement
349 | # I can't think of a case that contradicts this as of this moment
350 | return twist_frame
351 |
352 |
353 | def might_print_hexapod(hexapod, poses):
354 | if not PRINT_MODEL_ON_UPDATE:
355 | return
356 |
357 | print("█████████████████████████████")
358 | print("█ start: Hexapod Model █")
359 | print("█████████████████████████████")
360 |
361 | print("............")
362 | print("...Dimensions")
363 | print("............")
364 | print(json.dumps(hexapod.dimensions, indent=4))
365 |
366 | print("............")
367 | print("...Vertices")
368 | print("............")
369 | pprint(hexapod.body.all_points)
370 |
371 | print("............")
372 | print("...Legs")
373 | print("............")
374 | for i, leg in enumerate(hexapod.legs):
375 | print(f"\nleg{i}_points = ")
376 | pprint(leg.all_points)
377 |
378 | print("............")
379 | print("...Poses")
380 | print("............")
381 | print(json.dumps(poses, indent=4))
382 |
383 | print("█████████████████████████████")
384 | print("█ end: Hexapod Model █")
385 | print("█████████████████████████████")
386 |
--------------------------------------------------------------------------------
/.pylintrc:
--------------------------------------------------------------------------------
1 | [MASTER]
2 |
3 | # A comma-separated list of package or module names from where C extensions may
4 | # be loaded. Extensions are loading into the active Python interpreter and may
5 | # run arbitrary code.
6 | extension-pkg-whitelist=
7 |
8 | # Add files or directories to the blacklist. They should be base names, not
9 | # paths.
10 | #ignore=
11 |
12 | # Add files or directories matching the regex patterns to the blacklist. The
13 | # regex matches against base names, not paths.
14 | #ignore-patterns=
15 |
16 | # Python code to execute, usually for sys.path manipulation such as
17 | # pygtk.require().
18 | #init-hook=
19 |
20 | # Use multiple processes to speed up Pylint. Specifying 0 will auto-detect the
21 | # number of processors available to use.
22 | jobs=1
23 |
24 | # Control the amount of potential inferred values when inferring a single
25 | # object. This can help the performance when dealing with large functions or
26 | # complex, nested conditions.
27 | limit-inference-results=100
28 |
29 | # List of plugins (as comma separated values of python module names) to load,
30 | # usually to register additional checkers.
31 | load-plugins=
32 |
33 | # Pickle collected data for later comparisons.
34 | persistent=yes
35 |
36 | # Specify a configuration file.
37 | #rcfile=
38 |
39 | # When enabled, pylint would attempt to guess common misconfiguration and emit
40 | # user-friendly hints instead of false-positive error messages.
41 | suggestion-mode=yes
42 |
43 | # Allow loading of arbitrary C extensions. Extensions are imported into the
44 | # active Python interpreter and may run arbitrary code.
45 | unsafe-load-any-extension=no
46 |
47 |
48 | [MESSAGES CONTROL]
49 |
50 | # Only show warnings with the listed confidence levels. Leave empty to show
51 | # all. Valid levels: HIGH, INFERENCE, INFERENCE_FAILURE, UNDEFINED.
52 | confidence=
53 |
54 | # Disable the message, report, category or checker with the given id(s). You
55 | # can either give multiple identifiers separated by comma (,) or put this
56 | # option multiple times (only on the command line, not in the configuration
57 | # file where it should appear only once). You can also use "--disable=all" to
58 | # disable everything first and then reenable specific checks. For example, if
59 | # you want to run only the similarities checker, you can use "--disable=all
60 | # --enable=similarities". If you want to run only the classes checker, but have
61 | # no Warning level messages displayed, use "--disable=all --enable=classes
62 | # --disable=W".
63 | disable=print-statement,
64 | parameter-unpacking,
65 | unpacking-in-except,
66 | old-raise-syntax,
67 | backtick,
68 | long-suffix,
69 | old-ne-operator,
70 | old-octal-literal,
71 | import-star-module-level,
72 | non-ascii-bytes-literal,
73 | raw-checker-failed,
74 | bad-inline-option,
75 | locally-disabled,
76 | file-ignored,
77 | suppressed-message,
78 | useless-suppression,
79 | deprecated-pragma,
80 | use-symbolic-message-instead,
81 | apply-builtin,
82 | basestring-builtin,
83 | buffer-builtin,
84 | cmp-builtin,
85 | coerce-builtin,
86 | execfile-builtin,
87 | file-builtin,
88 | long-builtin,
89 | raw_input-builtin,
90 | reduce-builtin,
91 | standarderror-builtin,
92 | unicode-builtin,
93 | xrange-builtin,
94 | coerce-method,
95 | delslice-method,
96 | getslice-method,
97 | setslice-method,
98 | no-absolute-import,
99 | old-division,
100 | dict-iter-method,
101 | dict-view-method,
102 | next-method-called,
103 | metaclass-assignment,
104 | indexing-exception,
105 | raising-string,
106 | reload-builtin,
107 | oct-method,
108 | hex-method,
109 | nonzero-method,
110 | cmp-method,
111 | input-builtin,
112 | round-builtin,
113 | intern-builtin,
114 | unichr-builtin,
115 | map-builtin-not-iterating,
116 | zip-builtin-not-iterating,
117 | range-builtin-not-iterating,
118 | filter-builtin-not-iterating,
119 | using-cmp-argument,
120 | eq-without-hash,
121 | div-method,
122 | idiv-method,
123 | rdiv-method,
124 | exception-message-attribute,
125 | invalid-str-codec,
126 | sys-max-int,
127 | bad-python3-import,
128 | deprecated-string-function,
129 | deprecated-str-translate-call,
130 | deprecated-itertools-function,
131 | deprecated-types-field,
132 | next-method-defined,
133 | dict-items-not-iterating,
134 | dict-keys-not-iterating,
135 | dict-values-not-iterating,
136 | deprecated-operator-function,
137 | deprecated-urllib-function,
138 | xreadlines-attribute,
139 | deprecated-sys-function,
140 | exception-escape,
141 | comprehension-escape
142 |
143 | # Enable the message, report, category or checker with the given id(s). You can
144 | # either give multiple identifier separated by comma (,) or put this option
145 | # multiple time (only on the command line, not in the configuration file where
146 | # it should appear only once). See also the "--disable" option for examples.
147 | enable=c-extension-no-member
148 |
149 |
150 | [REPORTS]
151 |
152 | # Python expression which should return a score less than or equal to 10. You
153 | # have access to the variables 'error', 'warning', 'refactor', and 'convention'
154 | # which contain the number of messages in each category, as well as 'statement'
155 | # which is the total number of statements analyzed. This score is used by the
156 | # global evaluation report (RP0004).
157 | evaluation=10.0 - ((float(5 * error + warning + refactor + convention) / statement) * 10)
158 |
159 | # Template used to display messages. This is a python new-style format string
160 | # used to format the message information. See doc for all details.
161 | #msg-template=
162 |
163 | # Set the output format. Available formats are text, parseable, colorized, json
164 | # and msvs (visual studio). You can also give a reporter class, e.g.
165 | # mypackage.mymodule.MyReporterClass.
166 | output-format=text
167 |
168 | # Tells whether to display a full report or only the messages.
169 | reports=no
170 |
171 | # Activate the evaluation score.
172 | score=yes
173 |
174 |
175 | [REFACTORING]
176 |
177 | # Maximum number of nested blocks for function / method body
178 | max-nested-blocks=5
179 |
180 | # Complete name of functions that never returns. When checking for
181 | # inconsistent-return-statements if a never returning function is called then
182 | # it will be considered as an explicit return statement and no message will be
183 | # printed.
184 | never-returning-functions=sys.exit
185 |
186 |
187 | [LOGGING]
188 |
189 | # Format style used to check logging format string. `old` means using %
190 | # formatting, `new` is for `{}` formatting,and `fstr` is for f-strings.
191 | logging-format-style=old
192 |
193 | # Logging modules to check that the string format arguments are in logging
194 | # function parameter format.
195 | logging-modules=logging
196 |
197 |
198 | [SPELLING]
199 |
200 | # Limits count of emitted suggestions for spelling mistakes.
201 | max-spelling-suggestions=4
202 |
203 | # Spelling dictionary name. Available dictionaries: none. To make it work,
204 | # install the python-enchant package.
205 | spelling-dict=
206 |
207 | # List of comma separated words that should not be checked.
208 | spelling-ignore-words=
209 |
210 | # A path to a file that contains the private dictionary; one word per line.
211 | spelling-private-dict-file=
212 |
213 | # Tells whether to store unknown words to the private dictionary (see the
214 | # --spelling-private-dict-file option) instead of raising a message.
215 | spelling-store-unknown-words=no
216 |
217 |
218 | [MISCELLANEOUS]
219 |
220 | # List of note tags to take in consideration, separated by a comma.
221 | notes=FIXME,
222 | XXX,
223 | TODO
224 |
225 |
226 | [TYPECHECK]
227 |
228 | # List of decorators that produce context managers, such as
229 | # contextlib.contextmanager. Add to this list to register other decorators that
230 | # produce valid context managers.
231 | contextmanager-decorators=contextlib.contextmanager
232 |
233 | # List of members which are set dynamically and missed by pylint inference
234 | # system, and so shouldn't trigger E1101 when accessed. Python regular
235 | # expressions are accepted.
236 | generated-members=
237 |
238 | # Tells whether missing members accessed in mixin class should be ignored. A
239 | # mixin class is detected if its name ends with "mixin" (case insensitive).
240 | ignore-mixin-members=yes
241 |
242 | # Tells whether to warn about missing members when the owner of the attribute
243 | # is inferred to be None.
244 | ignore-none=yes
245 |
246 | # This flag controls whether pylint should warn about no-member and similar
247 | # checks whenever an opaque object is returned when inferring. The inference
248 | # can return multiple potential results while evaluating a Python object, but
249 | # some branches might not be evaluated, which results in partial inference. In
250 | # that case, it might be useful to still emit no-member and other checks for
251 | # the rest of the inferred objects.
252 | ignore-on-opaque-inference=yes
253 |
254 | # List of class names for which member attributes should not be checked (useful
255 | # for classes with dynamically set attributes). This supports the use of
256 | # qualified names.
257 | ignored-classes=optparse.Values,thread._local,_thread._local
258 |
259 | # List of module names for which member attributes should not be checked
260 | # (useful for modules/projects where namespaces are manipulated during runtime
261 | # and thus existing member attributes cannot be deduced by static analysis). It
262 | # supports qualified module names, as well as Unix pattern matching.
263 | ignored-modules=
264 |
265 | # Show a hint with possible names when a member name was not found. The aspect
266 | # of finding the hint is based on edit distance.
267 | missing-member-hint=yes
268 |
269 | # The minimum edit distance a name should have in order to be considered a
270 | # similar match for a missing member name.
271 | missing-member-hint-distance=1
272 |
273 | # The total number of similar names that should be taken in consideration when
274 | # showing a hint for a missing member.
275 | missing-member-max-choices=1
276 |
277 | # List of decorators that change the signature of a decorated function.
278 | signature-mutators=
279 |
280 |
281 | [VARIABLES]
282 |
283 | # List of additional names supposed to be defined in builtins. Remember that
284 | # you should avoid defining new builtins when possible.
285 | additional-builtins=
286 |
287 | # Tells whether unused global variables should be treated as a violation.
288 | allow-global-unused-variables=yes
289 |
290 | # List of strings which can identify a callback function by name. A callback
291 | # name must start or end with one of those strings.
292 | callbacks=cb_,
293 | _cb
294 |
295 | # A regular expression matching the name of dummy variables (i.e. expected to
296 | # not be used).
297 | dummy-variables-rgx=_+$|(_[a-zA-Z0-9_]*[a-zA-Z0-9]+?$)|dummy|^ignored_|^unused_
298 |
299 | # Argument names that match this expression will be ignored. Default to name
300 | # with leading underscore.
301 | ignored-argument-names=_.*|^ignored_|^unused_
302 |
303 | # Tells whether we should check for unused import in __init__ files.
304 | init-import=no
305 |
306 | # List of qualified module names which can have objects that can redefine
307 | # builtins.
308 | redefining-builtins-modules=six.moves,past.builtins,future.builtins,builtins,io
309 |
310 |
311 | [FORMAT]
312 |
313 | # Expected format of line ending, e.g. empty (any line ending), LF or CRLF.
314 | expected-line-ending-format=
315 |
316 | # Regexp for a line that is allowed to be longer than the limit.
317 | ignore-long-lines=^\s*(# )??$
318 |
319 | # Number of spaces of indent required inside a hanging or continued line.
320 | indent-after-paren=4
321 |
322 | # String used as indentation unit. This is usually " " (4 spaces) or "\t" (1
323 | # tab).
324 | indent-string=' '
325 |
326 | # Maximum number of characters on a single line.
327 | max-line-length=100
328 |
329 | # Maximum number of lines in a module.
330 | max-module-lines=1000
331 |
332 | # List of optional constructs for which whitespace checking is disabled. `dict-
333 | # separator` is used to allow tabulation in dicts, etc.: {1 : 1,\n222: 2}.
334 | # `trailing-comma` allows a space between comma and closing bracket: (a, ).
335 | # `empty-line` allows space-only lines.
336 | no-space-check=trailing-comma,
337 | dict-separator
338 |
339 | # Allow the body of a class to be on the same line as the declaration if body
340 | # contains single statement.
341 | single-line-class-stmt=no
342 |
343 | # Allow the body of an if to be on the same line as the test if there is no
344 | # else.
345 | single-line-if-stmt=no
346 |
347 |
348 | [SIMILARITIES]
349 |
350 | # Ignore comments when computing similarities.
351 | ignore-comments=yes
352 |
353 | # Ignore docstrings when computing similarities.
354 | ignore-docstrings=yes
355 |
356 | # Ignore imports when computing similarities.
357 | ignore-imports=no
358 |
359 | # Minimum lines number of a similarity.
360 | min-similarity-lines=4
361 |
362 |
363 | [BASIC]
364 |
365 | # Naming style matching correct argument names.
366 | argument-naming-style=snake_case
367 |
368 | # Regular expression matching correct argument names. Overrides argument-
369 | # naming-style.
370 | #argument-rgx=
371 |
372 | # Naming style matching correct attribute names.
373 | attr-naming-style=snake_case
374 |
375 | # Regular expression matching correct attribute names. Overrides attr-naming-
376 | # style.
377 | #attr-rgx=
378 |
379 | # Bad variable names which should always be refused, separated by a comma.
380 | bad-names=foo,
381 | bar,
382 | baz,
383 | toto,
384 | tutu,
385 | tata
386 |
387 | # Naming style matching correct class attribute names.
388 | class-attribute-naming-style=any
389 |
390 | # Regular expression matching correct class attribute names. Overrides class-
391 | # attribute-naming-style.
392 | #class-attribute-rgx=
393 |
394 | # Naming style matching correct class names.
395 | class-naming-style=PascalCase
396 |
397 | # Regular expression matching correct class names. Overrides class-naming-
398 | # style.
399 | #class-rgx=
400 |
401 | # Naming style matching correct constant names.
402 | const-naming-style=UPPER_CASE
403 |
404 | # Regular expression matching correct constant names. Overrides const-naming-
405 | # style.
406 | #const-rgx=
407 |
408 | # Minimum line length for functions/classes that require docstrings, shorter
409 | # ones are exempt.
410 | docstring-min-length=-1
411 |
412 | # Naming style matching correct function names.
413 | function-naming-style=snake_case
414 |
415 | # Regular expression matching correct function names. Overrides function-
416 | # naming-style.
417 | #function-rgx=
418 |
419 | # Good variable names which should always be accepted, separated by a comma.
420 | good-names=i,
421 | j,
422 | k,
423 | ex,
424 | Run,
425 | _
426 |
427 | # Include a hint for the correct naming format with invalid-name.
428 | include-naming-hint=no
429 |
430 | # Naming style matching correct inline iteration names.
431 | inlinevar-naming-style=any
432 |
433 | # Regular expression matching correct inline iteration names. Overrides
434 | # inlinevar-naming-style.
435 | #inlinevar-rgx=
436 |
437 | # Naming style matching correct method names.
438 | method-naming-style=snake_case
439 |
440 | # Regular expression matching correct method names. Overrides method-naming-
441 | # style.
442 | #method-rgx=
443 |
444 | # Naming style matching correct module names.
445 | module-naming-style=snake_case
446 |
447 | # Regular expression matching correct module names. Overrides module-naming-
448 | # style.
449 | #module-rgx=
450 |
451 | # Colon-delimited sets of names that determine each other's naming style when
452 | # the name regexes allow several styles.
453 | name-group=
454 |
455 | # Regular expression which should only match function or class names that do
456 | # not require a docstring.
457 | no-docstring-rgx=^_
458 |
459 | # List of decorators that produce properties, such as abc.abstractproperty. Add
460 | # to this list to register other decorators that produce valid properties.
461 | # These decorators are taken in consideration only for invalid-name.
462 | property-classes=abc.abstractproperty
463 |
464 | # Naming style matching correct variable names.
465 | variable-naming-style=snake_case
466 |
467 | # Regular expression matching correct variable names. Overrides variable-
468 | # naming-style.
469 | #variable-rgx=
470 |
471 |
472 | [STRING]
473 |
474 | # This flag controls whether the implicit-str-concat-in-sequence should
475 | # generate a warning on implicit string concatenation in sequences defined over
476 | # several lines.
477 | check-str-concat-over-line-jumps=no
478 |
479 |
480 | [IMPORTS]
481 |
482 | # List of modules that can be imported at any level, not just the top level
483 | # one.
484 | allow-any-import-level=
485 |
486 | # Allow wildcard imports from modules that define __all__.
487 | allow-wildcard-with-all=no
488 |
489 | # Analyse import fallback blocks. This can be used to support both Python 2 and
490 | # 3 compatible code, which means that the block might have code that exists
491 | # only in one or another interpreter, leading to false positives when analysed.
492 | analyse-fallback-blocks=no
493 |
494 | # Deprecated modules which should not be used, separated by a comma.
495 | deprecated-modules=optparse,tkinter.tix
496 |
497 | # Create a graph of external dependencies in the given file (report RP0402 must
498 | # not be disabled).
499 | ext-import-graph=
500 |
501 | # Create a graph of every (i.e. internal and external) dependencies in the
502 | # given file (report RP0402 must not be disabled).
503 | import-graph=
504 |
505 | # Create a graph of internal dependencies in the given file (report RP0402 must
506 | # not be disabled).
507 | int-import-graph=
508 |
509 | # Force import order to recognize a module as part of the standard
510 | # compatibility libraries.
511 | known-standard-library=
512 |
513 | # Force import order to recognize a module as part of a third party library.
514 | known-third-party=enchant
515 |
516 | # Couples of modules and preferred modules, separated by a comma.
517 | preferred-modules=
518 |
519 |
520 | [CLASSES]
521 |
522 | # List of method names used to declare (i.e. assign) instance attributes.
523 | defining-attr-methods=__init__,
524 | __new__,
525 | setUp,
526 | __post_init__
527 |
528 | # List of member names, which should be excluded from the protected access
529 | # warning.
530 | exclude-protected=_asdict,
531 | _fields,
532 | _replace,
533 | _source,
534 | _make
535 |
536 | # List of valid names for the first argument in a class method.
537 | valid-classmethod-first-arg=cls
538 |
539 | # List of valid names for the first argument in a metaclass class method.
540 | valid-metaclass-classmethod-first-arg=cls
541 |
542 |
543 | [DESIGN]
544 |
545 | # Maximum number of arguments for function / method.
546 | max-args=5
547 |
548 | # Maximum number of attributes for a class (see R0902).
549 | max-attributes=7
550 |
551 | # Maximum number of boolean expressions in an if statement (see R0916).
552 | max-bool-expr=5
553 |
554 | # Maximum number of branch for function / method body.
555 | max-branches=12
556 |
557 | # Maximum number of locals for function / method body.
558 | max-locals=15
559 |
560 | # Maximum number of parents for a class (see R0901).
561 | max-parents=7
562 |
563 | # Maximum number of public methods for a class (see R0904).
564 | max-public-methods=20
565 |
566 | # Maximum number of return / yield for function / method body.
567 | max-returns=6
568 |
569 | # Maximum number of statements in function / method body.
570 | max-statements=50
571 |
572 | # Minimum number of public methods for a class (see R0903).
573 | min-public-methods=2
574 |
575 |
576 | [EXCEPTIONS]
577 |
578 | # Exceptions that will emit a warning when being caught. Defaults to
579 | # "BaseException, Exception".
580 | overgeneral-exceptions=BaseException,
581 | Exception
582 |
--------------------------------------------------------------------------------