├── resource
└── tudelft_hackathon
├── dockerfiles
├── ignition
│ ├── README.md
│ ├── ignition-foxy
│ │ ├── entrypoint.sh
│ │ └── Dockerfile
│ └── ignition-humble
│ │ └── Dockerfile
├── ros1-2-ignition
│ ├── ros2_ws
│ │ ├── build.sh
│ │ ├── ros1_bridge.sh
│ │ └── src
│ │ │ └── cpp_pubsub
│ │ │ ├── package.xml
│ │ │ ├── src
│ │ │ └── subscriber_member_function.cpp
│ │ │ └── CMakeLists.txt
│ ├── ros1_ws
│ │ └── src
│ │ │ └── beginner_tutorials
│ │ │ ├── launch
│ │ │ └── talk.launch
│ │ │ ├── package.xml
│ │ │ ├── src
│ │ │ └── talker.cpp
│ │ │ └── CMakeLists.txt
│ ├── entrypoint.sh
│ ├── .vscode
│ │ ├── c_cpp_properties.json
│ │ ├── launch.json
│ │ ├── settings.json
│ │ └── tasks.json
│ ├── .devcontainer
│ │ ├── Dockerfile
│ │ └── devcontainer.json
│ ├── setup-ign-ardupilot-sitl.sh
│ ├── README.md
│ └── LICENSE
├── ignition-ardusub
│ ├── ignition-ardusub-foxy
│ │ ├── README.md
│ │ ├── entrypoint.sh
│ │ └── Dockerfile
│ └── ignition-ardusub-humble
│ │ ├── README.md
│ │ ├── entrypoint.sh
│ │ └── Dockerfile
├── ros-hackathon
│ ├── ros-hackathon-foxy
│ │ ├── entrypoint.sh
│ │ ├── README.md
│ │ └── Dockerfile
│ ├── ros-hackathon-foxy-dev
│ │ ├── entrypoint.sh
│ │ ├── Dockerfile
│ │ └── README.md
│ ├── ros-hackathon-humble
│ │ ├── entrypoint.sh
│ │ ├── README.md
│ │ └── Dockerfile
│ └── ros-hackathon-humble-dev
│ │ ├── entrypoint.sh
│ │ ├── Dockerfile
│ │ └── README.md
├── ignition-hackathon-gpus
│ ├── ignition-hackathon-non-nvidia
│ │ ├── ignition-hackathon-non-nvidia-foxy
│ │ │ ├── Dockerfile
│ │ │ └── README.md
│ │ └── ignition-hackathon-non-nvidia-humble
│ │ │ ├── Dockerfile
│ │ │ └── README.md
│ └── ignition-hackathon-nvidia
│ │ ├── ignition-hackathon-nvidia-foxy
│ │ ├── Dockerfile
│ │ └── README.md
│ │ └── ignition-hackathon-nvidia-humble
│ │ ├── Dockerfile
│ │ └── README.md
├── ignition-hackathon
│ ├── ignition-hackathon-humble-dev
│ │ ├── entrypoint.sh
│ │ ├── README.md
│ │ └── Dockerfile
│ ├── ignition-hackathon-humble
│ │ ├── entrypoint.sh
│ │ ├── README.md
│ │ └── Dockerfile
│ ├── ignition-hackathon-foxy
│ │ ├── entrypoint.sh
│ │ ├── README.md
│ │ └── Dockerfile
│ └── ignition-hackathon-foxy-dev
│ │ ├── entrypoint.sh
│ │ ├── README.md
│ │ └── Dockerfile
├── README.md
└── push-docker-images.sh
├── setup.py
├── launch
├── apm_pluginlists.yaml
├── bluerov_record.launch
├── bluerov.launch
├── bluerov_ign_sim.launch.py
├── bluerov_record.launch.py
├── bluerov_bringup_no_ign.launch.py
├── bluerov_bringup.launch.py
└── apm_config.yaml
├── CMakeLists.txt
├── .gitmodules
├── hackathon.rosinstall
├── package.xml
├── scripts
├── bluerov_agent.py
├── random_wall_avoidance.py
└── potential_avoidance.py
├── .gitignore
├── PARTICIPANTS_TODO.md
├── .github
└── workflows
│ └── container.yaml
└── README.md
/resource/tudelft_hackathon:
--------------------------------------------------------------------------------
1 |
--------------------------------------------------------------------------------
/dockerfiles/ignition/README.md:
--------------------------------------------------------------------------------
1 | ```
2 | sudo docker build -t ignition:foxy .
3 | ```
4 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros2_ws/build.sh:
--------------------------------------------------------------------------------
1 | colcon build --merge-install --allow-overriding message_filters orb
2 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-ardusub/ignition-ardusub-foxy/README.md:
--------------------------------------------------------------------------------
1 | # ArduSub image
2 |
3 | ```bash
4 | $ sudo docker build -t ardusub .
5 | ```
6 |
7 | xhost +local:root
8 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-ardusub/ignition-ardusub-humble/README.md:
--------------------------------------------------------------------------------
1 | # ArduSub image
2 |
3 | ```bash
4 | $ sudo docker build -t ardusub .
5 | ```
6 |
7 | xhost +local:root
8 |
--------------------------------------------------------------------------------
/dockerfiles/ignition/ignition-foxy/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/ign_ws/install/setup.bash"
7 |
8 | exec "$@"
9 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros1_ws/src/beginner_tutorials/launch/talk.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-foxy/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/tudelft_hackathon_ws/install/setup.bash"
7 |
8 | exec "$@"
9 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-foxy-dev/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/tudelft_hackathon_ws/install/setup.bash"
7 |
8 | exec "$@"
9 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-humble/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/humble/setup.bash"
6 | source "/tudelft_hackathon_ws/install/setup.bash"
7 |
8 | exec "$@"
9 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-humble-dev/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/humble/setup.bash"
6 | source "/tudelft_hackathon_ws/install/setup.bash"
7 |
8 | exec "$@"
9 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-foxy/README.md:
--------------------------------------------------------------------------------
1 | # ROS2 foxy + hackathon workspace image
2 |
3 | ```Bash
4 | $ sudo docker run -it --rm ros-foxy-hackathon ros2 launch tudelft_hackathon bluerov_bringup_no_ign.launch.py
5 | ```
6 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-humble/README.md:
--------------------------------------------------------------------------------
1 | # ROS2 foxy + hackathon workspace image
2 |
3 | ```Bash
4 | $ sudo docker run -it --rm ros-foxy-hackathon ros2 launch tudelft_hackathon bluerov_bringup_no_ign.launch.py
5 | ```
6 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/ign_ws/install/setup.bash"
7 | source "/tudelft_hackathon_ws/install/setup.bash"
8 |
9 | exec "$@"
10 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-ardusub/ignition-ardusub-humble/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/humble/setup.bash"
6 | source "/home/docker/ardupilot/Tools/completion/completion.bash"
7 | . ~/.profile
8 |
9 | exec "$@"
10 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-ardusub/ignition-ardusub-foxy/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/ign_ws/install/setup.bash"
7 | source "/home/docker/ardupilot/Tools/completion/completion.bash"
8 | . ~/.profile
9 |
10 | exec "$@"
11 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-foxy/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:hackathon
2 |
3 | USER root
4 | RUN apt update && apt install -y --no-install-recommends \
5 | libgl1-mesa-glx \
6 | libgl1-mesa-dri \
7 | && rm -rf /var/lib/apt/lists/
8 | USER docker
9 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-foxy/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:hackathon
2 |
3 | ENV NVIDIA_VISIBLE_DEVICES \
4 | ${NVIDIA_VISIBLE_DEVICES:-all}
5 | ENV NVIDIA_DRIVER_CAPABILITIES \
6 | ${NVIDIA_DRIVER_CAPABILITIES:+$NVIDIA_DRIVER_CAPABILITIES,}graphics
7 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-humble-dev/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/humble/setup.bash"
6 | source "/home/docker/tudelft_hackathon_ws/install/setup.bash"
7 | source "/home/docker/ardupilot/Tools/completion/completion.bash"
8 | . ~/.profile
9 |
10 | exec "$@"
11 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-humble/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/humble/setup.bash"
6 | source "/home/docker/tudelft_hackathon_ws/install/setup.bash"
7 | source "/home/docker/ardupilot/Tools/completion/completion.bash"
8 | . ~/.profile
9 |
10 | exec "$@"
11 |
--------------------------------------------------------------------------------
/setup.py:
--------------------------------------------------------------------------------
1 | from setuptools import setup
2 | from catkin_pkg.python_setup import generate_distutils_setup
3 |
4 | package_name ='tudelft_hackathon'
5 |
6 | setup(data_files=[
7 | ('share/' + package_name, ['package.xml']),
8 | ('share/ament_index/resource_index/packages',
9 | ['resource/' + package_name]),
10 | ])
11 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-foxy/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/ign_ws/install/setup.bash"
7 | source "/home/docker/tudelft_hackathon_ws/install/setup.bash"
8 | source "/home/docker/ardupilot/Tools/completion/completion.bash"
9 | . ~/.profile
10 |
11 | exec "$@"
12 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-foxy-dev/entrypoint.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | set -e
4 |
5 | source "/opt/ros/foxy/setup.bash"
6 | source "/ign_ws/install/setup.bash"
7 | source "/home/docker/tudelft_hackathon_ws/install/setup.bash"
8 | source "/home/docker/ardupilot/Tools/completion/completion.bash"
9 | . ~/.profile
10 |
11 | exec "$@"
12 |
--------------------------------------------------------------------------------
/dockerfiles/README.md:
--------------------------------------------------------------------------------
1 | # Dockerfiles
2 |
3 | Dockerfiles used to run everything required for the hackathon
4 |
5 | ## Images hierarchy
6 | - `ros:foxy-ros-core`
7 | - `rezenders/ignition:foxy`
8 | - `rezenders/ignition:foxy-ardusub`
9 | - `rezenders/ignition:hackathon`
10 | - `rezenders/ignition:hackathon-nvidia` or `rezenders/ignition:hackathon-non-nvidia`
11 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-humble/Dockerfile:
--------------------------------------------------------------------------------
1 | ARG BASE_IMAGE="ghcr.io/remaro-network/tudelft_hackathon_base:latest"
2 | FROM $BASE_IMAGE
3 |
4 | ENV NVIDIA_VISIBLE_DEVICES \
5 | ${NVIDIA_VISIBLE_DEVICES:-all}
6 | ENV NVIDIA_DRIVER_CAPABILITIES \
7 | ${NVIDIA_DRIVER_CAPABILITIES:+$NVIDIA_DRIVER_CAPABILITIES,}graphics
8 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-foxy-dev/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ros-foxy-hackathon
2 |
3 | COPY . /tudelft_hackathon_ws/src/tudelft_hackathon/
4 | RUN [ "/bin/bash","-c","source /opt/ros/foxy/setup.bash \
5 | && colcon build --symlink-install"]
6 |
7 | COPY dockerfiles/ros-foxy-hackathon-dev/entrypoint.sh /
8 | ENTRYPOINT ["/entrypoint.sh"]
9 | CMD ["bash"]
10 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros2_ws/ros1_bridge.sh:
--------------------------------------------------------------------------------
1 |
2 |
3 | # steps for running ros1 bridge
4 | echo "-- source noetic setup"
5 | . /opt/ros/noetic/setup.bash
6 |
7 | echo "-- source foxy setup"
8 | . /opt/ros/foxy/setup.bash
9 |
10 | echo "-- export master uri"
11 | export ROS_MASTER_URI=http://localhost:11311
12 |
13 | echo "-- run bridge"
14 | ros2 run ros1_bridge dynamic_bridge
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-humble/Dockerfile:
--------------------------------------------------------------------------------
1 | ARG BASE_IMAGE="ghcr.io/remaro-network/tudelft_hackathon_base:latest"
2 | FROM $BASE_IMAGE
3 |
4 | USER root
5 | RUN apt update && apt install -y --no-install-recommends \
6 | libgl1-mesa-glx \
7 | libgl1-mesa-dri \
8 | && rm -rf /var/lib/apt/lists/
9 | USER docker
10 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-humble-dev/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ros-hackathon-humble
2 |
3 | COPY . /tudelft_hackathon_ws/src/tudelft_hackathon/
4 | RUN [ "/bin/bash","-c","source /opt/ros/humble/setup.bash \
5 | && colcon build --symlink-install"]
6 |
7 | COPY dockerfiles/ros-hackathon/ros-hackathon-humble-dev/entrypoint.sh /
8 | ENTRYPOINT ["/entrypoint.sh"]
9 | CMD ["bash"]
10 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-foxy/README.md:
--------------------------------------------------------------------------------
1 | # Ignition bluerov2 image
2 |
3 | ```Bash
4 | $ sudo docker build -t ignition:foxy-hackathon .
5 | ```
6 |
7 | ```Bash
8 | $ xhost +local:root
9 | $ sudo docker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ignition:foxy-hackathon ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py
10 | ```
11 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-humble/README.md:
--------------------------------------------------------------------------------
1 | # Ignition bluerov2 image
2 |
3 | ```Bash
4 | $ sudo docker build -t ignition:foxy-hackathon .
5 | ```
6 |
7 | ```Bash
8 | $ xhost +local:root
9 | $ sudo docker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ignition:foxy-hackathon ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py
10 | ```
11 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-foxy-dev/README.md:
--------------------------------------------------------------------------------
1 | # ROS2 foxy + hackathon workspace image
2 |
3 | ```Bash
4 | $ cd tudelft_hackathon_ws/src/tudelft_hackathon
5 | $ sudo docker build -f dockerfiles/ros-foxy-hackathon-dev/Dockerfile -t ros-foxy-hackathon:dev .
6 | ```
7 |
8 | ```Bash
9 | $ sudo docker run -it --rm ros-foxy-hackathon:dev ros2 launch tudelft_hackathon bluerov_bringup_no_ign.launch.py
10 | ```
11 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-humble-dev/README.md:
--------------------------------------------------------------------------------
1 | # ROS2 foxy + hackathon workspace image
2 |
3 | ```Bash
4 | $ cd tudelft_hackathon_ws/src/tudelft_hackathon
5 | $ sudo docker build -f dockerfiles/ros-foxy-hackathon-dev/Dockerfile -t ros-foxy-hackathon:dev .
6 | ```
7 |
8 | ```Bash
9 | $ sudo docker run -it --rm ros-foxy-hackathon:dev ros2 launch tudelft_hackathon bluerov_bringup_no_ign.launch.py
10 | ```
11 |
--------------------------------------------------------------------------------
/launch/apm_pluginlists.yaml:
--------------------------------------------------------------------------------
1 | /mavros/**:
2 | ros__parameters:
3 | plugin_denylist:
4 | # common
5 | - actuator_control
6 | - ftp
7 | - hil
8 | # extras
9 | - altitude
10 | - debug_value
11 | - image_pub
12 | - px4flow
13 | - vibration
14 | - vision_speed_estimate
15 | - wheel_odometry
16 |
17 | # plugin_allowlist:
18 | # - 'sys_*'
19 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-foxy-dev/README.md:
--------------------------------------------------------------------------------
1 | # Ignition bluerov2 image
2 |
3 | ```Bash
4 | $ cd tudelft_hackathon_ws/src/tudelft_hackathon
5 | $ sudo docker build -f dockerfiles/ignition-foxy-hackathon-dev/Dockerfile -t ignition:foxy-hackathon-dev .
6 | ```
7 |
8 | ```Bash
9 | $ xhost +local:root
10 | $ sudo docker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ignition:foxy-hackathon-dev ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py
11 | ```
12 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-humble-dev/README.md:
--------------------------------------------------------------------------------
1 | # Ignition bluerov2 image
2 |
3 | ```Bash
4 | $ cd tudelft_hackathon_ws/src/tudelft_hackathon
5 | $ sudo docker build -f dockerfiles/ignition-foxy-hackathon-dev/Dockerfile -t ignition:foxy-hackathon-dev .
6 | ```
7 |
8 | ```Bash
9 | $ xhost +local:root
10 | $ sudo docker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ignition:foxy-hackathon-dev ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py
11 | ```
12 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-foxy-dev/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:hackathon-nvidia
2 |
3 | COPY . /home/docker/tudelft_hackathon_ws/src/tudelft_hackathon/
4 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 1' \
5 | && source /opt/ros/foxy/setup.bash \
6 | && colcon build --symlink-install"]
7 |
8 | WORKDIR /home/docker/tudelft_hackathon_ws/
9 |
10 | COPY dockerfiles/ignition-foxy-hackathon-dev/entrypoint.sh /home/docker/
11 | ENTRYPOINT ["/home/docker/entrypoint.sh"]
12 | CMD ["bash"]
13 |
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 3.5)
2 | project(tudelft_hackathon)
3 |
4 | find_package(ament_cmake REQUIRED COMPONENTS)
5 | find_package(ament_cmake_python REQUIRED COMPONENTS)
6 | find_package(rclpy REQUIRED)
7 | find_package(mavros_msgs REQUIRED)
8 |
9 | install(PROGRAMS
10 | scripts/bluerov_agent.py
11 | scripts/random_wall_avoidance.py
12 | scripts/potential_avoidance.py
13 | DESTINATION lib/${PROJECT_NAME}
14 | )
15 |
16 | install(DIRECTORY launch
17 | DESTINATION share/${PROJECT_NAME}
18 | )
19 |
20 | ament_package()
21 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-humble-dev/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:hackathon-nvidia-humble
2 |
3 | COPY . /home/docker/tudelft_hackathon_ws/src/tudelft_hackathon/
4 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 1' \
5 | && source /opt/ros/humble/setup.bash \
6 | && colcon build --symlink-install"]
7 |
8 | WORKDIR /home/docker/tudelft_hackathon_ws/
9 |
10 | COPY dockerfiles/ignition-hackathon/ignition-hackathon-humble-dev/entrypoint.sh /home/docker/
11 | ENTRYPOINT ["/home/docker/entrypoint.sh"]
12 | CMD ["bash"]
13 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-foxy/README.md:
--------------------------------------------------------------------------------
1 | #Ignition-nvidia image
2 |
3 | ## Install nvidia-docker
4 | Follow instructions on this [link](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#installing-on-ubuntu-and-debian)
5 |
6 | ## Build image
7 |
8 | ```Bash
9 | $ sudo docker build -t ignition:foxy-nvidia .
10 | ```
11 |
12 | ## Run image
13 |
14 | ```Bash
15 | $ xhost +local:root
16 | $ sudo docker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ignition:nvidia ign gazebo
17 | ```
18 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-humble/README.md:
--------------------------------------------------------------------------------
1 | #Ignition-nvidia image
2 |
3 | ## Install nvidia-docker
4 | Follow instructions on this [link](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#installing-on-ubuntu-and-debian)
5 |
6 | ## Build image
7 |
8 | ```Bash
9 | $ sudo docker build -t ignition:foxy-nvidia .
10 | ```
11 |
12 | ## Run image
13 |
14 | ```Bash
15 | $ xhost +local:root
16 | $ sudo docker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ignition:nvidia ign gazebo
17 | ```
18 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/.vscode/c_cpp_properties.json:
--------------------------------------------------------------------------------
1 | {
2 | "configurations": [
3 | {
4 | "name": "Linux",
5 | "includePath": [
6 | "${workspaceFolder}/**",
7 | "/dpds/**",
8 | "/opt/ros/foxy/include/**"
9 | ],
10 | "defines": [],
11 | "compilerPath": "/usr/bin/gcc",
12 | "compileCommands": "${workspaceFolder}/build/compile_commands.json",
13 | "cStandard": "c99",
14 | "cppStandard": "c++14",
15 | "intelliSenseMode": "clang-x64"
16 | }
17 | ],
18 | "version": 4
19 | }
--------------------------------------------------------------------------------
/.gitmodules:
--------------------------------------------------------------------------------
1 | [submodule "dockerfiles/ros1-2-ignition/ardupilot"]
2 | path = dockerfiles/ros1-2-ignition/ardupilot
3 | url = https://github.com/ArduPilot/ardupilot.git
4 | [submodule "dockerfiles/ros1-2-ignition/ros2_ws/src/bluerov2_ignition"]
5 | path = dockerfiles/ros1-2-ignition/ros2_ws/src/bluerov2_ignition
6 | url = https://github.com/Rezenders/bluerov2_ignition.git
7 | [submodule "dockerfiles/ros1-2-ignition/ardupilot_gazebo"]
8 | path = dockerfiles/ros1-2-ignition/ardupilot_gazebo
9 | url = https://github.com/ArduPilot/ardupilot_gazebo
10 | [submodule "dockerfiles/ros1-2-ignition/ros2_ws/src/remaro_worlds"]
11 | path = dockerfiles/ros1-2-ignition/ros2_ws/src/remaro_worlds
12 | url = https://github.com/remaro-network/remaro_worlds.git
13 |
--------------------------------------------------------------------------------
/dockerfiles/ignition/ignition-humble/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM ros:humble-ros-core-jammy
2 |
3 | RUN apt update && apt install -y --no-install-recommends \
4 | wget \
5 | gnupg \
6 | lsb-release \
7 | && rm -rf /var/lib/apt/lists/
8 |
9 | RUN wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
10 | RUN echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
11 |
12 | RUN apt update && DEBIAN_FRONTEND=noninteractive apt install -y \
13 | gz-garden \
14 | && rm -rf /var/lib/apt/lists/
15 |
16 | CMD ["bash"]
17 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-foxy/README.md:
--------------------------------------------------------------------------------
1 | #Ignition-non-nvidia image
2 |
3 | ## Info
4 | http://wiki.ros.org/docker/Tutorials/Hardware%20Acceleration
5 |
6 | ## Build image
7 |
8 | ```Bash
9 | $ sudo docker build -t ignition:foxy-non-nvidia .
10 | ```
11 |
12 | ## AMD
13 |
14 | ```Bash
15 | $ xhost +local:root
16 | $ sudo docker run --rm -it --device=/dev/dri --group-add video --volume=/tmp/.X11-unix:/tmp/.X11-unix --env="DISPLAY=$DISPLAY" ignition:non-nvidia ign gazebo
17 | ```
18 |
19 | ## Intel
20 |
21 | ```Bash
22 | $ xhost +local:root
23 | $ sudo docker run --rm -it --device=/dev/dri:/dev/dri --volume=/tmp/.X11-unix:/tmp/.X11-unix --env="DISPLAY=$DISPLAY" ignition:non-nvidia ign gazebo
24 | ```
25 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-humble/README.md:
--------------------------------------------------------------------------------
1 | #Ignition-non-nvidia image
2 |
3 | ## Info
4 | http://wiki.ros.org/docker/Tutorials/Hardware%20Acceleration
5 |
6 | ## Build image
7 |
8 | ```Bash
9 | $ sudo docker build -t ignition:foxy-non-nvidia .
10 | ```
11 |
12 | ## AMD
13 |
14 | ```Bash
15 | $ xhost +local:root
16 | $ sudo docker run --rm -it --device=/dev/dri --group-add video --volume=/tmp/.X11-unix:/tmp/.X11-unix --env="DISPLAY=$DISPLAY" ignition:non-nvidia ign gazebo
17 | ```
18 |
19 | ## Intel
20 |
21 | ```Bash
22 | $ xhost +local:root
23 | $ sudo docker run --rm -it --device=/dev/dri:/dev/dri --volume=/tmp/.X11-unix:/tmp/.X11-unix --env="DISPLAY=$DISPLAY" ignition:non-nvidia ign gazebo
24 | ```
25 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros2_ws/src/cpp_pubsub/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 | cpp_pubsub
5 | 0.0.0
6 | TODO: Package description
7 | ros
8 | TODO: License declaration
9 |
10 | rclcpp
11 | std_msgs
12 |
13 | ament_cmake
14 |
15 | ament_lint_auto
16 | ament_lint_common
17 |
18 |
19 | ament_cmake
20 |
21 |
22 |
--------------------------------------------------------------------------------
/hackathon.rosinstall:
--------------------------------------------------------------------------------
1 | repositories:
2 | bluerov2_ignition:
3 | type: git
4 | url: https://github.com/Rezenders/bluerov2_ignition.git
5 | version: 6756666
6 | mavros:
7 | type: git
8 | url: https://github.com/mavlink/mavros.git
9 | version: 6a26851
10 | mavros_wrapper:
11 | type: git
12 | url: https://github.com/remaro-network/mavros_wrapper.git
13 | version: ros2
14 | ping360_sonar:
15 | type: git
16 | url: https://github.com/CentraleNantesRobotics/ping360_sonar.git
17 | version: fa53b8f
18 | remaro_worlds:
19 | type: git
20 | url: https://github.com/remaro-network/remaro_worlds.git
21 | version: ign-garden
22 | tudelft_hackathon:
23 | type: git
24 | url: https://github.com/remaro-network/tudelft_hackathon.git
25 | version: ros2
26 | ros_gz:
27 | type: git
28 | url: https://github.com/gazebosim/ros_gz.git
29 | version: 151d3d8
30 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros2_ws/src/cpp_pubsub/src/subscriber_member_function.cpp:
--------------------------------------------------------------------------------
1 | #include
2 |
3 | #include "rclcpp/rclcpp.hpp"
4 | #include "std_msgs/msg/string.hpp"
5 | using std::placeholders::_1;
6 |
7 | class MinimalSubscriber : public rclcpp::Node
8 | {
9 | public:
10 | MinimalSubscriber()
11 | : Node("minimal_subscriber")
12 | {
13 | subscription_ = this->create_subscription(
14 | "chatter", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
15 | }
16 |
17 | private:
18 | void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
19 | {
20 | RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
21 | }
22 | rclcpp::Subscription::SharedPtr subscription_;
23 | };
24 |
25 | int main(int argc, char * argv[])
26 | {
27 | rclcpp::init(argc, argv);
28 | rclcpp::spin(std::make_shared());
29 | rclcpp::shutdown();
30 | return 0;
31 | }
32 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/.devcontainer/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:hackathon-nvidia
2 |
3 | USER root
4 | ENV DEBIAN_FRONTEND=noninteractive
5 | RUN apt-get update \
6 | && apt-get -y install --no-install-recommends nano ros-foxy-rviz2 terminator gdb \
7 | && rm -rf /var/lib/apt/lists/
8 | USER docker
9 |
10 | RUN echo "alias sf='source /opt/ros/foxy/setup.bash'" >> /home/docker/.bashrc
11 | RUN echo "alias s='source install/setup.bash'" >> /home/docker/.bashrc
12 | RUN echo "alias m='bash build.sh'" >> /home/docker/.bashrc
13 | RUN echo "source /home/docker/tudelft_hackathon_ws/install/setup.bash" >> /home/docker/.bashrc
14 | RUN echo "source /ign_ws/install/setup.bash" >> /home/docker/.bashrc
15 | RUN echo "source /home/docker/ardupilot/Tools/completion/completion.bash" >> /home/docker/.bashrc
16 |
17 | COPY . /home/docker/tudelft_hackathon_ws/src/tudelft_hackathon/
18 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 1' \
19 | && source /opt/ros/foxy/setup.bash \
20 | && colcon build --symlink-install"]
21 |
22 | WORKDIR /home/docker/tudelft_hackathon_ws/
23 |
--------------------------------------------------------------------------------
/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | tudelft_hackathon
4 | 0.0.0
5 | TU Delft REMARO hackathon package
6 |
7 | Gustavo Rezende
8 |
9 |
10 |
11 |
12 |
13 | TODO
14 |
15 | ament_cmake
16 | ament_cmake_python
17 |
18 | rclpy
19 | rclpy
20 | rclpy
21 |
22 | mavros
23 | mavros
24 | mavros
25 |
26 | mavros_msgs
27 | mavros_wrapper
28 | ros_gz
29 |
30 |
31 | ament_cmake
32 |
33 |
34 |
35 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/setup-ign-ardupilot-sitl.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 | pip install future
3 | pip3 install mavproxy pymavlink
4 |
5 | cd ardupilot_gazebo
6 | mkdir -p build && cd build
7 | cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo
8 | make -j4
9 | cd ..
10 | cd ..
11 | echo 'export IGN_GAZEBO_SYSTEM_PLUGIN_PATH=$PWD/ardupilot_gazebo/build:${IGN_GAZEBO_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc
12 | echo 'export IGN_GAZEBO_RESOURCE_PATH=$PWD/ardupilot_gazebo/models:$PWD/ardupilot_gazebo/worlds:${IGN_GAZEBO_RESOURCE_PATH}' >> ~/.bashrc
13 |
14 | echo 'export IGN_GAZEBO_RESOURCE_PATH=$PWD/ros2_ws/src/bluerov2_ignition/models:$PWD/ros2_ws/src/bluerov2_ignition/worlds:${IGN_GAZEBO_RESOURCE_PATH}' >> ~/.bashrc
15 | echo 'export IGN_GAZEBO_RESOURCE_PATH=$PWD/ros2_ws/src/remaro_worlds/models:$PWD/ros2_ws/src/remaro_worlds/worlds:${IGN_GAZEBO_RESOURCE_PATH}' >> ~/.bashrc
16 |
17 | cd ardupilot
18 | git checkout ArduSub-stable -b new-branch
19 | git submodule update --init --recursive
20 | Tools/environment_install/install-prereqs-ubuntu.sh -y
21 | . ~/.profile
22 | ./waf clean
23 | ./waf configure --board Pixhawk1
24 | ./waf sub
25 | # Tools/autotest/sim_vehicle.py -L RATBeach -v ArduSub --model=JSON --out=udp:0.0.0.0:14550 --console
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/.devcontainer/devcontainer.json:
--------------------------------------------------------------------------------
1 | // See https://aka.ms/vscode-remote/devcontainer.json for format details.
2 | {
3 | "dockerFile": "Dockerfile",
4 | "build": {
5 | "args": {
6 | "WORKSPACE": "${containerWorkspaceFolder}"
7 | }
8 | },
9 | "remoteUser": "docker",
10 | "runArgs": [
11 | "--network=host",
12 | "--cap-add=SYS_PTRACE",
13 | "--security-opt=seccomp:unconfined",
14 | "--security-opt=apparmor:unconfined",
15 | "--volume=/tmp/.X11-unix:/tmp/.X11-unix",
16 | "--gpus",
17 | "all",
18 | ],
19 | "containerEnv": { "DISPLAY": "${localEnv:DISPLAY}" },
20 | // Set *default* container specific settings.json values on container create.
21 | "settings": {
22 | "terminal.integrated.profiles.linux": {
23 | "bash": {
24 | "path": "bash"
25 | },
26 | },
27 | "terminal.integrated.defaultProfile.linux": "bash"
28 | },
29 | "extensions": [
30 | "dotjoshjohnson.xml",
31 | "zachflower.uncrustify",
32 | "ms-azuretools.vscode-docker",
33 | "ms-python.python",
34 | "ms-vscode.cpptools",
35 | "redhat.vscode-yaml",
36 | "smilerobotics.urdf",
37 | "streetsidesoftware.code-spell-checker",
38 | "twxs.cmake",
39 | "yzhang.markdown-all-in-one"
40 | ]
41 | }
42 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros2_ws/src/cpp_pubsub/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 3.5)
2 | project(cpp_pubsub)
3 |
4 | # Default to C99
5 | if(NOT CMAKE_C_STANDARD)
6 | set(CMAKE_C_STANDARD 99)
7 | endif()
8 |
9 | # Default to C++14
10 | if(NOT CMAKE_CXX_STANDARD)
11 | set(CMAKE_CXX_STANDARD 14)
12 | endif()
13 |
14 | if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
15 | add_compile_options(-Wall -Wextra -Wpedantic)
16 | endif()
17 |
18 | # find dependencies
19 | find_package(ament_cmake REQUIRED)
20 | # uncomment the following section in order to fill in
21 | # further dependencies manually.
22 | # find_package( REQUIRED)
23 |
24 | find_package(rclcpp REQUIRED)
25 | find_package(std_msgs REQUIRED)
26 |
27 | add_executable(listener src/subscriber_member_function.cpp)
28 | ament_target_dependencies(listener rclcpp std_msgs)
29 |
30 | install(TARGETS
31 | listener
32 | DESTINATION lib/${PROJECT_NAME})
33 |
34 | if(BUILD_TESTING)
35 | find_package(ament_lint_auto REQUIRED)
36 | # the following line skips the linter which checks for copyrights
37 | # uncomment the line when a copyright and license is not present in all source files
38 | #set(ament_cmake_copyright_FOUND TRUE)
39 | # the following line skips cpplint (only works in a git repo)
40 | # uncomment the line when this package is not in a git repo
41 | #set(ament_cmake_cpplint_FOUND TRUE)
42 | ament_lint_auto_find_test_dependencies()
43 | endif()
44 |
45 | ament_package()
46 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-foxy/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM ros:foxy-ros-core
2 |
3 | RUN apt update && apt install -y --no-install-recommends\
4 | git \
5 | wget \
6 | build-essential \
7 | libboost-all-dev \
8 | python3-pip \
9 | python3-vcstool \
10 | python3-rosdep \
11 | python-is-python3 \
12 | python3-colcon-common-extensions \
13 | && rm -rf /var/lib/apt/lists/
14 |
15 | RUN rosdep init
16 |
17 | RUN mkdir -p /tudelft_hackathon_ws/src
18 |
19 | WORKDIR /tudelft_hackathon_ws
20 |
21 | RUN wget https://raw.githubusercontent.com/remaro-network/tudelft_hackathon/ros2/hackathon.rosinstall
22 | RUN vcs import src < hackathon.rosinstall --recursive
23 |
24 | RUN [ "/bin/bash","-c","source /opt/ros/foxy/setup.bash \
25 | && apt update && rosdep update \
26 | && rosdep install --from-paths src --ignore-src -r -y \
27 | && rm -rf /var/lib/apt/lists/"]
28 |
29 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 2' \
30 | && source /opt/ros/foxy/setup.bash \
31 | && colcon build --symlink-install"]
32 |
33 | WORKDIR /tudelft_hackathon_ws/src/mavros/mavros/scripts
34 | RUN [ "/bin/bash","-c","apt update \
35 | && ./install_geographiclib_datasets.sh \
36 | && rm -rf /var/lib/apt/lists/"]
37 |
38 | WORKDIR /tudelft_hackathon_ws/
39 | ENV IGN_GAZEBO_RESOURCE_PATH=/tudelft_hackathon_ws/src/remaro_worlds/models:/remaro_worlds/worlds:${IGN_GAZEBO_RESOURCE_PATH}
40 |
41 | COPY entrypoint.sh /
42 | ENTRYPOINT ["/entrypoint.sh"]
43 | CMD ["bash"]
44 |
--------------------------------------------------------------------------------
/dockerfiles/ros-hackathon/ros-hackathon-humble/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:humble
2 |
3 | RUN apt update && apt install -y --no-install-recommends\
4 | git \
5 | wget \
6 | build-essential \
7 | libboost-all-dev \
8 | python3-pip \
9 | python3-vcstool \
10 | python3-rosdep \
11 | python-is-python3 \
12 | python3-colcon-common-extensions \
13 | && rm -rf /var/lib/apt/lists/
14 |
15 | RUN rosdep init
16 |
17 | RUN mkdir -p /tudelft_hackathon_ws/src
18 |
19 | WORKDIR /tudelft_hackathon_ws
20 |
21 | RUN wget https://raw.githubusercontent.com/remaro-network/tudelft_hackathon/ros2/hackathon.rosinstall
22 | RUN vcs import src < hackathon.rosinstall --recursive
23 |
24 | RUN [ "/bin/bash","-c","source /opt/ros/humble/setup.bash \
25 | && apt update && rosdep update \
26 | && rosdep install --from-paths src --ignore-src -r -y \
27 | && rm -rf /var/lib/apt/lists/"]
28 |
29 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 2' \
30 | && source /opt/ros/humble/setup.bash \
31 | && colcon build --symlink-install"]
32 |
33 | WORKDIR /tudelft_hackathon_ws/src/mavros/mavros/scripts
34 | RUN [ "/bin/bash","-c","apt update \
35 | && ./install_geographiclib_datasets.sh \
36 | && rm -rf /var/lib/apt/lists/"]
37 |
38 | WORKDIR /tudelft_hackathon_ws/
39 | ENV GZ_SIM_RESOURCE_PATH=/tudelft_hackathon_ws/src/remaro_worlds/models:/remaro_worlds/worlds:${GZ_SIM_RESOURCE_PATH}
40 |
41 | COPY entrypoint.sh /
42 | ENTRYPOINT ["/entrypoint.sh"]
43 | CMD ["bash"]
44 |
--------------------------------------------------------------------------------
/launch/bluerov_record.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
--------------------------------------------------------------------------------
/launch/bluerov.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
36 |
37 |
38 |
--------------------------------------------------------------------------------
/scripts/bluerov_agent.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | import sys
3 | import rclpy
4 | from rclpy.node import Node
5 | import threading
6 |
7 | from mavros_wrapper.ardusub_wrapper import *
8 |
9 | def mission(ardusub):
10 |
11 | service_timer = ardusub.create_rate(2)
12 | while ardusub.status.mode != "MANUAL":
13 | ardusub.set_mode("MANUAL")
14 | service_timer.sleep()
15 |
16 | print("Manual mode selected")
17 |
18 | while ardusub.status.armed == False:
19 | ardusub.arm_motors(True)
20 | service_timer.sleep()
21 |
22 | print("Thrusters armed")
23 |
24 | print("Initializing mission")
25 |
26 | timer = ardusub.create_rate(0.5) # Hz
27 |
28 | ardusub.toogle_rc_override(True)
29 | ardusub.set_rc_override_channels(forward=0.5)
30 | timer.sleep()
31 | ardusub.set_rc_override_channels(lateral=0.5)
32 | timer.sleep()
33 | ardusub.set_rc_override_channels(forward=-0.5)
34 | timer.sleep()
35 | ardusub.set_rc_override_channels(lateral=-0.5)
36 | timer.sleep()
37 | ardusub.set_rc_override_channels(lateral=0)
38 | ardusub.toogle_rc_override(False)
39 |
40 | print("Mission completed")
41 |
42 | if __name__ == '__main__':
43 | print("Starting Bluerov agent node")
44 |
45 | # Initialize ros node
46 | rclpy.init(args=sys.argv)
47 |
48 | ardusub = BlueROVArduSubWrapper("ardusub_node")
49 |
50 | thread = threading.Thread(target=rclpy.spin, args=(ardusub, ), daemon=True)
51 | thread.start()
52 |
53 | mission(ardusub)
54 |
55 | ardusub.destroy_node()
56 | rclpy.shutdown()
57 | thread.join()
58 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/.vscode/launch.json:
--------------------------------------------------------------------------------
1 | {
2 | // Use IntelliSense to learn about possible attributes.
3 | // Hover to view descriptions of existing attributes.
4 | // For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
5 | "version": "0.2.0",
6 | "configurations": [
7 | // Example launch of a python file
8 | {
9 | "name": "Python: Current File",
10 | "type": "python",
11 | "request": "launch",
12 | "program": "${file}",
13 | "console": "integratedTerminal",
14 | },
15 | // Example gdb launch of a ros executable
16 | {
17 | "name": "(gdb) Launch",
18 | "type": "cppdbg",
19 | "request": "launch",
20 | "program": "${workspaceFolder}/ros2/install/${input:package}/lib/${input:package}/${input:program}",
21 | "args": [],
22 | "preLaunchTask": "build",
23 | "stopAtEntry": true,
24 | "cwd": "${workspaceFolder}/ros2/",
25 | "externalConsole": false,
26 | "MIMode": "gdb",
27 | "miDebuggerPath": "/usr/bin/gdb",
28 | "setupCommands": [
29 | {
30 | "description": "Enable pretty-printing for gdb",
31 | "text": "-enable-pretty-printing",
32 | "ignoreFailures": true
33 | }
34 | ]
35 | }
36 | ],
37 | "inputs": [
38 | {
39 | "id": "package",
40 | "type": "promptString",
41 | "description": "Package name",
42 | "default": "examples_rclcpp_minimal_publisher"
43 | },
44 | {
45 | "id": "program",
46 | "type": "promptString",
47 | "description": "Program name",
48 | "default": "publisher_member_function"
49 | }
50 | ]
51 | }
--------------------------------------------------------------------------------
/dockerfiles/ignition-ardusub/ignition-ardusub-foxy/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:foxy
2 |
3 | ENV DEBIAN_FRONTEND noninteractive
4 |
5 | RUN apt-get update && apt-get install -y\
6 | git \
7 | sudo \
8 | tzdata \
9 | locales \
10 | lsb-release \
11 | build-essential \
12 | keyboard-configuration \
13 | && rm -rf /var/lib/apt/lists/
14 |
15 | # Set the locale
16 | RUN sed -i '/en_US.UTF-8/s/^# //g' /etc/locale.gen && \
17 | locale-gen
18 | ENV LANG en_US.UTF-8
19 | ENV LANGUAGE en_US:en
20 | ENV LC_ALL en_US.UTF-8
21 |
22 | # create new user
23 | RUN adduser --disabled-password \
24 | --gecos '' docker
25 |
26 | # Add new user docker to sudo group
27 | RUN adduser docker sudo
28 |
29 | # Ensure sudo group users are not asked for a password when using
30 | # sudo command by ammending sudoers file
31 | RUN echo '%sudo ALL=(ALL) NOPASSWD:ALL' >> \
32 | /etc/sudoers
33 |
34 | # now we can set USER to the user we just created
35 | USER docker
36 | ENV DEBIAN_FRONTEND noninteractive
37 |
38 | WORKDIR /home/docker/
39 | RUN git clone https://github.com/ArduPilot/ardupilot.git -b Sub-4.1 --recurse
40 | WORKDIR /home/docker/ardupilot
41 |
42 | # RUN git config --global --add safe.directory /ardupilot
43 | RUN USER=docker Tools/environment_install/install-prereqs-ubuntu.sh -y
44 | RUN . ~/.profile
45 |
46 | ENV PATH=/opt/gcc-arm-none-eabi-6-2017-q2-update/bin:$PATH
47 | ENV PATH=$PATH:/home/docker/ardupilot/Tools/autotest
48 | ENV PATH=/usr/lib/ccache:$PATH
49 |
50 | WORKDIR /home/docker/ardupilot
51 | RUN ["/bin/bash","-c","./waf configure && make sub"]
52 | WORKDIR /home/docker/ardupilot/ArduSub
53 |
54 | COPY entrypoint.sh /home/docker/entrypoint.sh
55 | ENTRYPOINT ["/home/docker/entrypoint.sh"]
56 |
--------------------------------------------------------------------------------
/dockerfiles/ignition/ignition-foxy/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM ros:foxy-ros-core
2 |
3 | RUN apt update && apt install -y --no-install-recommends \
4 | git \
5 | wget \
6 | curl \
7 | gnupg \
8 | lsb-release \
9 | python3-pip \
10 | && rm -rf /var/lib/apt/lists/
11 |
12 | RUN sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
13 | RUN curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | apt-key add -
14 |
15 | RUN apt update && DEBIAN_FRONTEND=noninteractive apt install -y --no-install-recommends\
16 | python3-vcstool \
17 | python3-colcon-common-extensions \
18 | && rm -rf /var/lib/apt/lists/
19 |
20 | RUN mkdir -p /ign_ws/src
21 | WORKDIR /ign_ws/src
22 | RUN wget https://raw.githubusercontent.com/Rezenders/bluerov2_ignition/main/garden.repos
23 | RUN vcs import < garden.repos
24 |
25 | RUN wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
26 | RUN echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
27 |
28 | RUN apt update && apt install -y --no-install-recommends\
29 | $(sort -u $(find . -iname 'packages-'`lsb_release -cs`'.apt' -o -iname 'packages.apt' | grep -v '/\.git/') | sed '/ignition\|sdf/d' | tr '\n' ' ') \
30 | && rm -rf /var/lib/apt/lists/
31 |
32 | WORKDIR /ign_ws/
33 |
34 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 2' \
35 | && colcon build --cmake-args -DBUILD_TESTING=OFF --merge-install --executor sequential"]
36 |
37 | COPY entrypoint.sh /
38 | ENTRYPOINT ["/entrypoint.sh"]
39 | CMD ["bash"]
40 |
--------------------------------------------------------------------------------
/scripts/random_wall_avoidance.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | import sys
3 | import rclpy
4 | import random
5 | import threading
6 |
7 | from rclpy.node import Node
8 |
9 | from sensor_msgs.msg import LaserScan
10 | from mavros_wrapper.ardusub_wrapper import *
11 |
12 |
13 | def laser_scan_cb(msg, ardusub):
14 | min_distance = 1.5
15 | yaw_speed = 0.3
16 | forward_speed = 0.15
17 | allGreater = True
18 | for scan in msg.ranges:
19 | if scan < min_distance:
20 | allGreater = False
21 | _yaw_speed = (-1)**random.choice([1, 2])*yaw_speed
22 | ardusub.set_rc_override_channels(
23 | forward=-forward_speed/4,
24 | yaw=_yaw_speed)
25 | break
26 | if allGreater:
27 | ardusub.set_rc_override_channels(forward=forward_speed)
28 |
29 |
30 | if __name__ == '__main__':
31 | print("Starting wall avoidance. Let's swim!")
32 |
33 | # Initialize ros node
34 | rclpy.init(args=sys.argv)
35 |
36 | ardusub = BlueROVArduSubWrapper("ardusub_node")
37 |
38 | thread = threading.Thread(target=rclpy.spin, args=(ardusub, ), daemon=True)
39 | thread.start()
40 |
41 | service_timer = ardusub.create_rate(2)
42 | while ardusub.status.mode != "ALT_HOLD":
43 | ardusub.set_mode("ALT_HOLD")
44 | service_timer.sleep()
45 |
46 | print("ALT HOLD mode selected")
47 |
48 | while ardusub.status.armed is False:
49 | ardusub.arm_motors(True)
50 | service_timer.sleep()
51 |
52 | print("Thrusters armed")
53 |
54 | print("Initializing mission")
55 |
56 | ardusub.toogle_rc_override(True)
57 | ardusub.set_rc_override_channels(forward=0.35)
58 |
59 | laser_subscriber = ardusub.create_subscription(
60 | LaserScan, '/scan', (lambda msg: laser_scan_cb(msg, ardusub)), 10)
61 |
62 | rate = ardusub.create_rate(2)
63 | try:
64 | while rclpy.ok():
65 | rate.sleep()
66 | except KeyboardInterrupt:
67 | pass
68 |
69 | ardusub.destroy_node()
70 | rclpy.shutdown()
71 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-ardusub/ignition-ardusub-humble/Dockerfile:
--------------------------------------------------------------------------------
1 | ARG BASE_IMAGE="ghcr.io/remaro-network/ignition-humble:latest"
2 | FROM $BASE_IMAGE
3 |
4 | ENV DEBIAN_FRONTEND noninteractive
5 |
6 | RUN apt-get update && apt-get install -y\
7 | git \
8 | sudo \
9 | tzdata \
10 | locales \
11 | lsb-release \
12 | build-essential \
13 | keyboard-configuration \
14 | && rm -rf /var/lib/apt/lists/
15 |
16 | # Set the locale
17 | RUN sed -i '/en_US.UTF-8/s/^# //g' /etc/locale.gen && \
18 | locale-gen
19 | ENV LANG en_US.UTF-8
20 | ENV LANGUAGE en_US:en
21 | ENV LC_ALL en_US.UTF-8
22 |
23 | # create new user
24 | RUN adduser --disabled-password \
25 | --gecos '' docker
26 |
27 | # Add new user docker to sudo group
28 | RUN adduser docker sudo
29 |
30 | # Ensure sudo group users are not asked for a password when using
31 | # sudo command by ammending sudoers file
32 | RUN echo '%sudo ALL=(ALL) NOPASSWD:ALL' >> \
33 | /etc/sudoers
34 |
35 | # now we can set USER to the user we just created
36 | USER docker
37 | ENV DEBIAN_FRONTEND noninteractive
38 |
39 | WORKDIR /home/docker/
40 | RUN git clone https://github.com/ArduPilot/ardupilot.git
41 | WORKDIR /home/docker/ardupilot
42 | RUN git checkout 94ba4ec
43 | RUN git submodule update --init --recursive
44 |
45 | # RUN git config --global --add safe.directory /ardupilot
46 | WORKDIR /home/docker/ardupilot/Tools/environment_install/
47 | RUN rm install-prereqs-ubuntu.sh
48 | RUN wget https://raw.githubusercontent.com/ArduPilot/ardupilot/master/Tools/environment_install/install-prereqs-ubuntu.sh
49 | WORKDIR /home/docker/ardupilot
50 | RUN chmod +x Tools/environment_install/install-prereqs-ubuntu.sh
51 | RUN USER=docker Tools/environment_install/install-prereqs-ubuntu.sh -y
52 | RUN . ~/.profile
53 |
54 | RUN sudo pip3 install -U mavproxy PyYAML
55 |
56 | ENV PATH=/opt/gcc-arm-none-eabi-10-2020-q4-major/bin:$PATH
57 | ENV PATH=$PATH:$HOME/ardupilot/Tools/autotest
58 | ENV PATH=/usr/lib/ccache:$PATH
59 |
60 | WORKDIR /home/docker/ardupilot
61 | RUN ["/bin/bash","-c","./waf configure && make sub"]
62 | WORKDIR /home/docker/ardupilot/ArduSub
63 |
64 | COPY entrypoint.sh /home/docker/entrypoint.sh
65 | ENTRYPOINT ["/home/docker/entrypoint.sh"]
66 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-humble/Dockerfile:
--------------------------------------------------------------------------------
1 | ARG BASE_IMAGE="ghcr.io/remaro-network/ignition-ardusub-humble:latest"
2 | FROM $BASE_IMAGE
3 |
4 | USER root
5 | RUN apt update && apt install -y --no-install-recommends \
6 | vim \
7 | rapidjson-dev \
8 | libboost-all-dev \
9 | python3-pip \
10 | python3-vcstool \
11 | python3-rosdep \
12 | python-is-python3 \
13 | python3-colcon-common-extensions \
14 | && rm -rf /var/lib/apt/lists/
15 |
16 | USER docker
17 |
18 | WORKDIR /home/docker/
19 | RUN git clone https://github.com/ArduPilot/ardupilot_gazebo.git
20 |
21 | WORKDIR /home/docker/ardupilot_gazebo
22 |
23 | RUN [ "/bin/bash","-c","mkdir build && cd build \
24 | && cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo\
25 | && make"]
26 |
27 | ENV GZ_SIM_SYSTEM_PLUGIN_PATH=/home/docker/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}
28 | ENV GZ_SIM_RESOURCE_PATH=/home/docker/ardupilot_gazebo/models:/home/docker/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}
29 |
30 | RUN mkdir -p /home/docker/tudelft_hackathon_ws/src
31 |
32 | WORKDIR /home/docker/tudelft_hackathon_ws/
33 | RUN wget https://raw.githubusercontent.com/remaro-network/tudelft_hackathon/ros2/hackathon.rosinstall
34 | RUN vcs import src < hackathon.rosinstall --recursive
35 |
36 | RUN ["/bin/bash", "-c", "source /opt/ros/humble/setup.bash \
37 | && sudo apt update \
38 | && sudo rosdep init \
39 | && rosdep update \
40 | && rosdep install --from-paths src --ignore-src -r -y \
41 | && sudo rm -rf /var/lib/apt/lists/"]
42 |
43 | RUN ["/bin/bash", "-c", "sudo ./src/mavros/mavros/scripts/install_geographiclib_datasets.sh"]
44 |
45 | ENV GZ_VERSION="garden"
46 | RUN [ "/bin/bash","-c","source /opt/ros/humble/setup.bash \
47 | && colcon build --symlink-install"]
48 |
49 | ENV GZ_SIM_RESOURCE_PATH=/home/docker/tudelft_hackathon_ws/src/bluerov2_ignition/models:/home/docker/bluerov2_ignition/worlds:${GZ_SIM_RESOURCE_PATH}
50 | ENV GZ_SIM_RESOURCE_PATH=/home/docker/tudelft_hackathon_ws/src/remaro_worlds/models:/home/docker/tudelft_hackathon_ws/src/remaro_worlds/worlds:${GZ_SIM_RESOURCE_PATH}
51 |
52 | WORKDIR /home/docker/tudelft_hackathon_ws/
53 |
54 | COPY entrypoint.sh /home/docker/
55 | ENTRYPOINT ["/home/docker/entrypoint.sh"]
56 | CMD ["bash"]
57 |
--------------------------------------------------------------------------------
/launch/bluerov_ign_sim.launch.py:
--------------------------------------------------------------------------------
1 | import os
2 |
3 | from ament_index_python.packages import get_package_share_directory
4 |
5 | from launch import LaunchDescription
6 | from launch.actions import DeclareLaunchArgument
7 | from launch.actions import IncludeLaunchDescription
8 | from launch.actions import ExecuteProcess
9 | from launch.conditions import IfCondition
10 | from launch.launch_description_sources import PythonLaunchDescriptionSource
11 | from launch.substitutions import LaunchConfiguration
12 |
13 | from launch_ros.actions import Node
14 |
15 |
16 | def generate_launch_description():
17 | ardusub_arg = LaunchConfiguration('ardusub')
18 | ardusub_arg = DeclareLaunchArgument(
19 | 'ardusub',
20 | default_value='false'
21 | )
22 |
23 | mavros_url_arg = LaunchConfiguration('mavros_url')
24 | mavros_url_arg = DeclareLaunchArgument(
25 | 'mavros_url',
26 | default_value='0.0.0.0:14550',
27 | )
28 |
29 | pkg_ros_gz_sim = get_package_share_directory('ros_gz_sim')
30 |
31 | gz_sim = IncludeLaunchDescription(
32 | PythonLaunchDescriptionSource(
33 | os.path.join(pkg_ros_gz_sim, 'launch', 'gz_sim.launch.py')),
34 | launch_arguments={
35 | 'gz_args': '-r room_walls.world'
36 | }.items(),
37 | )
38 |
39 | # TODO: Pass x, y, z, R, P and Y as parameter
40 | bluerov_spawn = Node(
41 | package='ros_gz_sim',
42 | executable='create',
43 | arguments=[
44 | '-world', 'walls',
45 | '-file', 'bluerov2_lidar',
46 | '-name', 'bluerov2',
47 | '-x', '10',
48 | '-y', '-6.0',
49 | '-z', '-19.5',
50 | '-Y', '-1.57']
51 | )
52 |
53 | # Bridge
54 | bridge = Node(
55 | package='ros_gz_bridge',
56 | executable='parameter_bridge',
57 | arguments=['lidar@sensor_msgs/msg/LaserScan@gz.msgs.LaserScan'],
58 | remappings=[('/lidar', '/scan')],
59 | output='screen'
60 | )
61 |
62 | return LaunchDescription([
63 | gz_sim,
64 | bluerov_spawn,
65 | bridge,
66 | ardusub_arg,
67 | mavros_url_arg,
68 | ExecuteProcess(
69 | cmd=[
70 | 'sim_vehicle.py', '-v', 'ArduSub',
71 | '-L', 'RATBeach', '--model=JSON',
72 | '--out', LaunchConfiguration('mavros_url'), '--console'],
73 | output='screen',
74 | condition=IfCondition(LaunchConfiguration('ardusub'))
75 | ),
76 | ])
77 |
--------------------------------------------------------------------------------
/dockerfiles/ignition-hackathon/ignition-hackathon-foxy/Dockerfile:
--------------------------------------------------------------------------------
1 | FROM rezenders/ignition:foxy-ardusub
2 |
3 | USER root
4 | RUN apt update && apt install -y --no-install-recommends \
5 | vim \
6 | rapidjson-dev \
7 | libboost-all-dev \
8 | python3-pip \
9 | python3-vcstool \
10 | python3-rosdep \
11 | python-is-python3 \
12 | python3-colcon-common-extensions \
13 | && rm -rf /var/lib/apt/lists/
14 |
15 | RUN rosdep init
16 |
17 | USER docker
18 |
19 | WORKDIR /home/docker/
20 | RUN git clone https://github.com/ArduPilot/ardupilot_gazebo.git -b ignition-garden
21 |
22 | WORKDIR /home/docker/ardupilot_gazebo
23 |
24 | RUN [ "/bin/bash","-c","source /ign_ws/install/setup.bash \
25 | && mkdir build && cd build \
26 | && cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo\
27 | && make"]
28 |
29 | ENV IGN_GAZEBO_SYSTEM_PLUGIN_PATH=/home/docker/ardupilot_gazebo/build:${IGN_GAZEBO_SYSTEM_PLUGIN_PATH}
30 | ENV IGN_GAZEBO_RESOURCE_PATH=/home/docker/ardupilot_gazebo/models:/home/docker/ardupilot_gazebo/worlds:${IGN_GAZEBO_RESOURCE_PATH}
31 |
32 | RUN mkdir -p /home/docker/tudelft_hackathon_ws/src
33 |
34 | WORKDIR /home/docker/tudelft_hackathon_ws/
35 | RUN wget https://raw.githubusercontent.com/remaro-network/tudelft_hackathon/ros2/hackathon.rosinstall
36 | RUN vcs import src < hackathon.rosinstall --recursive
37 |
38 |
39 | USER root
40 |
41 | WORKDIR /home/docker/tudelft_hackathon_ws/src/mavros/mavros/scripts
42 | RUN [ "/bin/bash","-c","apt update \
43 | && ./install_geographiclib_datasets.sh \
44 | && rm -rf /var/lib/apt/lists/"]
45 |
46 | WORKDIR /home/docker/tudelft_hackathon_ws/
47 | RUN [ "/bin/bash","-c","source /opt/ros/foxy/setup.bash \
48 | && apt update && rosdep update \
49 | && rosdep install --from-paths src --ignore-src -r -y \
50 | && rm -rf /var/lib/apt/lists/"]
51 |
52 | USER docker
53 | RUN [ "/bin/bash","-c","export MAKEFLAGS='-j 1' \
54 | && source /opt/ros/foxy/setup.bash \
55 | && colcon build --symlink-install"]
56 |
57 | ENV IGN_GAZEBO_RESOURCE_PATH=/home/docker/tudelft_hackathon_ws/src/bluerov2_ignition/models:/home/docker/bluerov2_ignition/worlds:${IGN_GAZEBO_RESOURCE_PATH}
58 | ENV IGN_GAZEBO_RESOURCE_PATH=/home/docker/tudelft_hackathon_ws/src/remaro_worlds/models:/home/docker/tudelft_hackathon_ws/src/remaro_worlds/worlds:${IGN_GAZEBO_RESOURCE_PATH}
59 |
60 | WORKDIR /home/docker/tudelft_hackathon_ws/
61 |
62 | COPY entrypoint.sh /home/docker/
63 | ENTRYPOINT ["/home/docker/entrypoint.sh"]
64 | CMD ["bash"]
65 |
--------------------------------------------------------------------------------
/dockerfiles/push-docker-images.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | # ignition:foxy
4 | #docker build --no-cache -t rezenders/ignition:foxy -f ignition/ignition-foxy/Dockerfile ignition/ignition-foxy/
5 | #docker push rezenders/ignition:foxy
6 |
7 | # ignition:humble
8 | docker build -t rezenders/ignition:humble -f ignition/ignition-humble/Dockerfile ignition/ignition-humble/
9 | docker push rezenders/ignition:humble
10 |
11 | # ignition:ardusub-foxy
12 | #docker build --no-cache -t rezenders/ignition:ardusub-foxy -f ignition-ardusub/ignition-ardusub-foxy/Dockerfile ignition-ardusub/ignition-ardusub-foxy/
13 | #docker push rezenders/ignition:ardusub-foxy
14 |
15 | # ignition:ardusub-humble
16 | docker build -t rezenders/ignition:ardusub-humble -f ignition-ardusub/ignition-ardusub-humble/Dockerfile ignition-ardusub/ignition-ardusub-humble/
17 | docker push rezenders/ignition:ardusub-humble
18 |
19 | # ignition:hackathon-foxy
20 | #docker build --no-cache -t rezenders/ignition:hackathon-foxy -f ignition-hackathon/ignition-hackathon-foxy/Dockerfile ignition-hackathon/ignition-hackathon-foxy/
21 | #docker push rezenders/ignition:hackathon-foxy
22 |
23 | # ignition:hackathon-humble
24 | docker build -t rezenders/ignition:hackathon-humble -f ignition-hackathon/ignition-hackathon-humble/Dockerfile ignition-hackathon/ignition-hackathon-humble/
25 | docker push rezenders/ignition:hackathon-humble
26 |
27 | # ignition:hackathon-nvidia-foxy
28 | #docker build --no-cache -t rezenders/ignition:hackathon-nvidia -f ignition-nvidia/Dockerfile ignition-nvidia/
29 | #docker push rezenders/ignition:hackathon-nvidia
30 |
31 | # ignition:hackathon-nvidia-humble
32 | docker build -t rezenders/ignition:hackathon-nvidia-humble -f ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-humble/Dockerfile ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-humble/
33 | docker push rezenders/ignition:hackathon-nvidia-humble
34 |
35 | # ignition:hackathon-non-nvidia-foxy
36 | #docker build --no-cache -t rezenders/ignition:hackathon-non-nvidia -f ignition-non-nvidia/Dockerfile ignition-non-nvidia/
37 | #docker push rezenders/ignition:hackathon-non-nvidia
38 |
39 | # ignition:hackathon-non-nvidia-foxy
40 | docker build -t rezenders/ignition:hackathon-non-nvidia -f ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-humble/Dockerfile ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-humble/
41 | docker push rezenders/ignition:hackathon-non-nvidia-humble
42 |
43 | #ros-hackathon-foxy
44 | #docker build --no-cache -t rezenders/ros-foxy-hackathon -f ros-foxy-hackathon/Dockerfile ros-foxy-hackathon/
45 | #docker push rezenders/ros-foxy-hackathon
46 |
47 | #ros-hackathon-humble
48 | docker build -t rezenders/ros-hackathon-humble -f ros-hackathon/ros-hackathon-humble/Dockerfile ros-hackathon/ros-hackathon-humble/
49 | docker push rezenders/ros-hackathon-humble
50 |
--------------------------------------------------------------------------------
/.gitignore:
--------------------------------------------------------------------------------
1 | # ardusub sitl logs
2 | *.tlog
3 | *.tlog.raw
4 | eeprom.bin
5 |
6 | # Byte-compiled / optimized / DLL files
7 | __pycache__/
8 | *.py[cod]
9 | *$py.class
10 |
11 | # C extensions
12 | *.so
13 |
14 | # Distribution / packaging
15 | .Python
16 | build/
17 | develop-eggs/
18 | dist/
19 | downloads/
20 | eggs/
21 | .eggs/
22 | lib/
23 | lib64/
24 | parts/
25 | sdist/
26 | var/
27 | wheels/
28 | pip-wheel-metadata/
29 | share/python-wheels/
30 | *.egg-info/
31 | .installed.cfg
32 | *.egg
33 | MANIFEST
34 |
35 | # PyInstaller
36 | # Usually these files are written by a python script from a template
37 | # before PyInstaller builds the exe, so as to inject date/other infos into it.
38 | *.manifest
39 | *.spec
40 |
41 | # Installer logs
42 | pip-log.txt
43 | pip-delete-this-directory.txt
44 |
45 | # Unit test / coverage reports
46 | htmlcov/
47 | .tox/
48 | .nox/
49 | .coverage
50 | .coverage.*
51 | .cache
52 | nosetests.xml
53 | coverage.xml
54 | *.cover
55 | *.py,cover
56 | .hypothesis/
57 | .pytest_cache/
58 |
59 | # Translations
60 | *.mo
61 | *.pot
62 |
63 | # Django stuff:
64 | *.log
65 | local_settings.py
66 | db.sqlite3
67 | db.sqlite3-journal
68 |
69 | # Flask stuff:
70 | instance/
71 | .webassets-cache
72 |
73 | # Scrapy stuff:
74 | .scrapy
75 |
76 | # Sphinx documentation
77 | docs/_build/
78 |
79 | # PyBuilder
80 | target/
81 |
82 | # Jupyter Notebook
83 | .ipynb_checkpoints
84 |
85 | # IPython
86 | profile_default/
87 | ipython_config.py
88 |
89 | # pyenv
90 | .python-version
91 |
92 | # pipenv
93 | # According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control.
94 | # However, in case of collaboration, if having platform-specific dependencies or dependencies
95 | # having no cross-platform support, pipenv may install dependencies that don't work, or not
96 | # install all needed dependencies.
97 | #Pipfile.lock
98 |
99 | # PEP 582; used by e.g. github.com/David-OConnor/pyflow
100 | __pypackages__/
101 |
102 | # Celery stuff
103 | celerybeat-schedule
104 | celerybeat.pid
105 |
106 | # SageMath parsed files
107 | *.sage.py
108 |
109 | # Environments
110 | .env
111 | .venv
112 | env/
113 | venv/
114 | ENV/
115 | env.bak/
116 | venv.bak/
117 |
118 | # Spyder project settings
119 | .spyderproject
120 | .spyproject
121 |
122 | # Rope project settings
123 | .ropeproject
124 |
125 | # mkdocs documentation
126 | /site
127 |
128 | # mypy
129 | .mypy_cache/
130 | .dmypy.json
131 | dmypy.json
132 |
133 | # Pyre type checker
134 | .pyre/
135 |
136 | ros1_ws/build/*
137 | ros1_ws/install/*
138 | ros1_ws/devel/*
139 | ros1_ws/logs/*
140 | ros1_ws/site/*
141 | ros1_ws/.catkin_tools/*
142 |
143 | dockerfiles/ros1-2-ignition/ros2_ws/build/*
144 | dockerfiles/ros1-2-ignition/ros2_ws/install/*
145 | dockerfiles/ros1-2-ignition/ros2_ws/log/*
146 | dockerfiles/ros1-2-ignition/ros2_ws/site/*
147 |
148 | *.bag
149 |
150 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros1_ws/src/beginner_tutorials/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | beginner_tutorials
4 | 0.0.0
5 | The beginner_tutorials package
6 |
7 |
8 |
9 |
10 | ros
11 |
12 |
13 |
14 |
15 |
16 | TODO
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
42 |
43 |
44 |
45 |
46 |
47 |
48 |
49 |
50 |
51 | catkin
52 | roscpp
53 | rospy
54 | std_msgs
55 | roscpp
56 | rospy
57 | std_msgs
58 | roscpp
59 | rospy
60 | std_msgs
61 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros1_ws/src/beginner_tutorials/src/talker.cpp:
--------------------------------------------------------------------------------
1 | #include "ros/ros.h"
2 | #include "std_msgs/String.h"
3 |
4 | #include
5 |
6 | /**
7 | * This tutorial demonstrates simple sending of messages over the ROS system.
8 | */
9 | int main(int argc, char **argv)
10 | {
11 | /**
12 | * The ros::init() function needs to see argc and argv so that it can perform
13 | * any ROS arguments and name remapping that were provided at the command line.
14 | * For programmatic remappings you can use a different version of init() which takes
15 | * remappings directly, but for most command-line programs, passing argc and argv is
16 | * the easiest way to do it. The third argument to init() is the name of the node.
17 | *
18 | * You must call one of the versions of ros::init() before using any other
19 | * part of the ROS system.
20 | */
21 | ros::init(argc, argv, "talker");
22 |
23 | /**
24 | * NodeHandle is the main access point to communications with the ROS system.
25 | * The first NodeHandle constructed will fully initialize this node, and the last
26 | * NodeHandle destructed will close down the node.
27 | */
28 | ros::NodeHandle n;
29 |
30 | /**
31 | * The advertise() function is how you tell ROS that you want to
32 | * publish on a given topic name. This invokes a call to the ROS
33 | * master node, which keeps a registry of who is publishing and who
34 | * is subscribing. After this advertise() call is made, the master
35 | * node will notify anyone who is trying to subscribe to this topic name,
36 | * and they will in turn negotiate a peer-to-peer connection with this
37 | * node. advertise() returns a Publisher object which allows you to
38 | * publish messages on that topic through a call to publish(). Once
39 | * all copies of the returned Publisher object are destroyed, the topic
40 | * will be automatically unadvertised.
41 | *
42 | * The second parameter to advertise() is the size of the message queue
43 | * used for publishing messages. If messages are published more quickly
44 | * than we can send them, the number here specifies how many messages to
45 | * buffer up before throwing some away.
46 | */
47 | ros::Publisher chatter_pub = n.advertise("chatter", 1000);
48 |
49 | ros::Rate loop_rate(10);
50 |
51 | /**
52 | * A count of how many messages we have sent. This is used to create
53 | * a unique string for each message.
54 | */
55 | int count = 0;
56 | while (ros::ok())
57 | {
58 | /**
59 | * This is a message object. You stuff it with data, and then publish it.
60 | */
61 | std_msgs::String msg;
62 |
63 | std::stringstream ss;
64 | ss << "hello world " << count;
65 | msg.data = ss.str();
66 |
67 | ROS_INFO("%s", msg.data.c_str());
68 |
69 | /**
70 | * The publish() function is how you send messages. The parameter
71 | * is the message object. The type of this object must agree with the type
72 | * given as a template parameter to the advertise<>() call, as was done
73 | * in the constructor above.
74 | */
75 | chatter_pub.publish(msg);
76 |
77 | ros::spinOnce();
78 |
79 | loop_rate.sleep();
80 | ++count;
81 | }
82 |
83 |
84 | return 0;
85 | }
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/README.md:
--------------------------------------------------------------------------------
1 | # ROS2 Workspace for REMARO's hackaton
2 | This template will get you set up using ROS2 in VSCode as your IDE.
3 | It is structured as follows:
4 | ```
5 | ├──ros1-2-ignition
6 | │ ├──setup-ign-ardupilot-sitl.sh
7 | │ ├──ardupilot
8 | | | └── ...
9 | │ ├──ardupilot_gazebo
10 | | | └── ...
11 | │ ├──ros2_ws # ROS Foxy workspace
12 | | | ├── src
13 | | | | ├──bluerov2_ignition # Code for Bluerov2 simulation in Ignition
14 | | | | ├──remaro_worlds # Ignition simulated environments
15 | | | | └── ...
16 | │ | └── ...
17 | │ └── ...
18 | └── ...
19 | ```
20 |
21 | Note that ardupilot, bluerov2_ignition and remaro_worlds are included in this repository as git submodules.
22 |
23 | ## Some things to keep in mind
24 |
25 | ### Shortcuts
26 | ROS need sourcing of its setup files. Since we have both ROS1 and 2, we need to source the ROS versions that we are using (usually ROS2). Some shortcuts are defined in the .bashrc file for convenience. They are listed here:
27 | - `sf`: as in source foxy, resolves to 'source /opt/ros/foxy/setup.bash'
28 | - `sn`: as in source noetic, resolves to 'source /opt/ros/noetic/setup.bash'
29 | - `s`: as in source (local), resolves to 'source install/setup.bash' to source local environment in ROS2
30 | - `m`: as in make, resolves to 'bash build.sh', requires a build script to be present in the local directory
31 |
32 | In this hackaton, you will source ROS2 (foxy), and therefore type `sf` and `s`. Note that `s` must be run from `ros2_ws` directory.
33 |
34 | Now, let's get hands-on!
35 |
36 | # Install everything that is necessary
37 |
38 | - Install docker on your machine. You can find instructions [here](https://docs.docker.com/engine/install/ubuntu/)
39 | - Allow non-root users to manage docker. Instructions [here](https://docs.docker.com/engine/install/linux-postinstall/#manage-docker-as-a-non-root-user)
40 | - Install VSCode. Instructions [here](https://code.visualstudio.com/download)
41 |
42 | # Open the container in vscode
43 | - Clone the hackaton's repo in your computer:
44 | ```Bash
45 | $ git clone https://github.com/remaro-network/tudelft_hackathon.git
46 | ```
47 | - Go to the folder containing this Dev container (i.e. ros1-2-ignition folder)
48 | - Open it from VSCode (File->Open Folder).
49 | - click on the little green square in the bottom left corner, which should bring up the container dialog
50 |
51 | 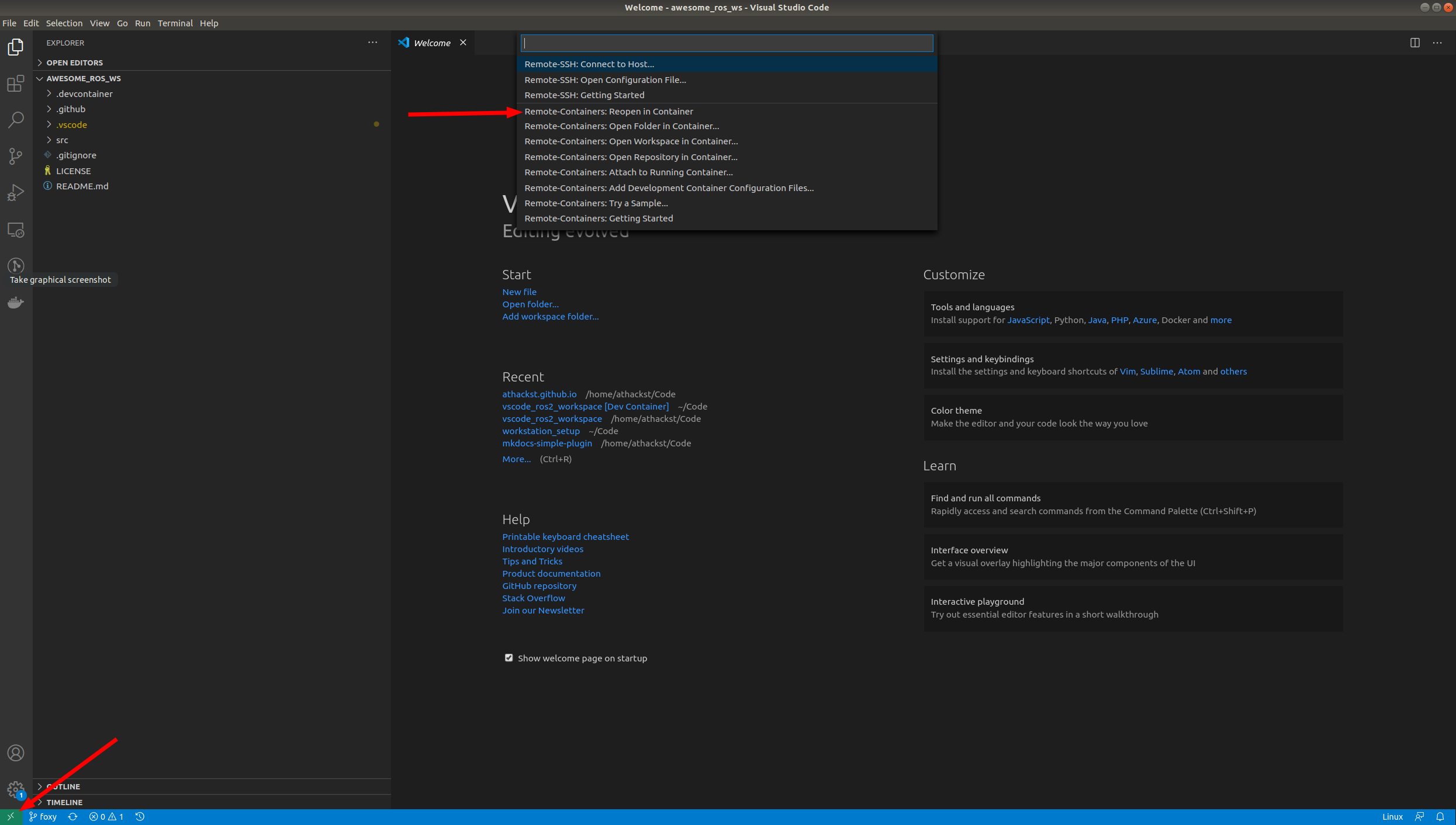
52 |
53 | - In the dialog, select "Remote Containers: Reopen in container"
54 |
55 | VSCode will build the dockerfile inside of `.devcontainer` for you. If you open a terminal inside VSCode (Terminal->New Terminal), you should see that your username has been changed to `ros`, and the bottom left green corner should say "Dev Container"
56 |
57 | 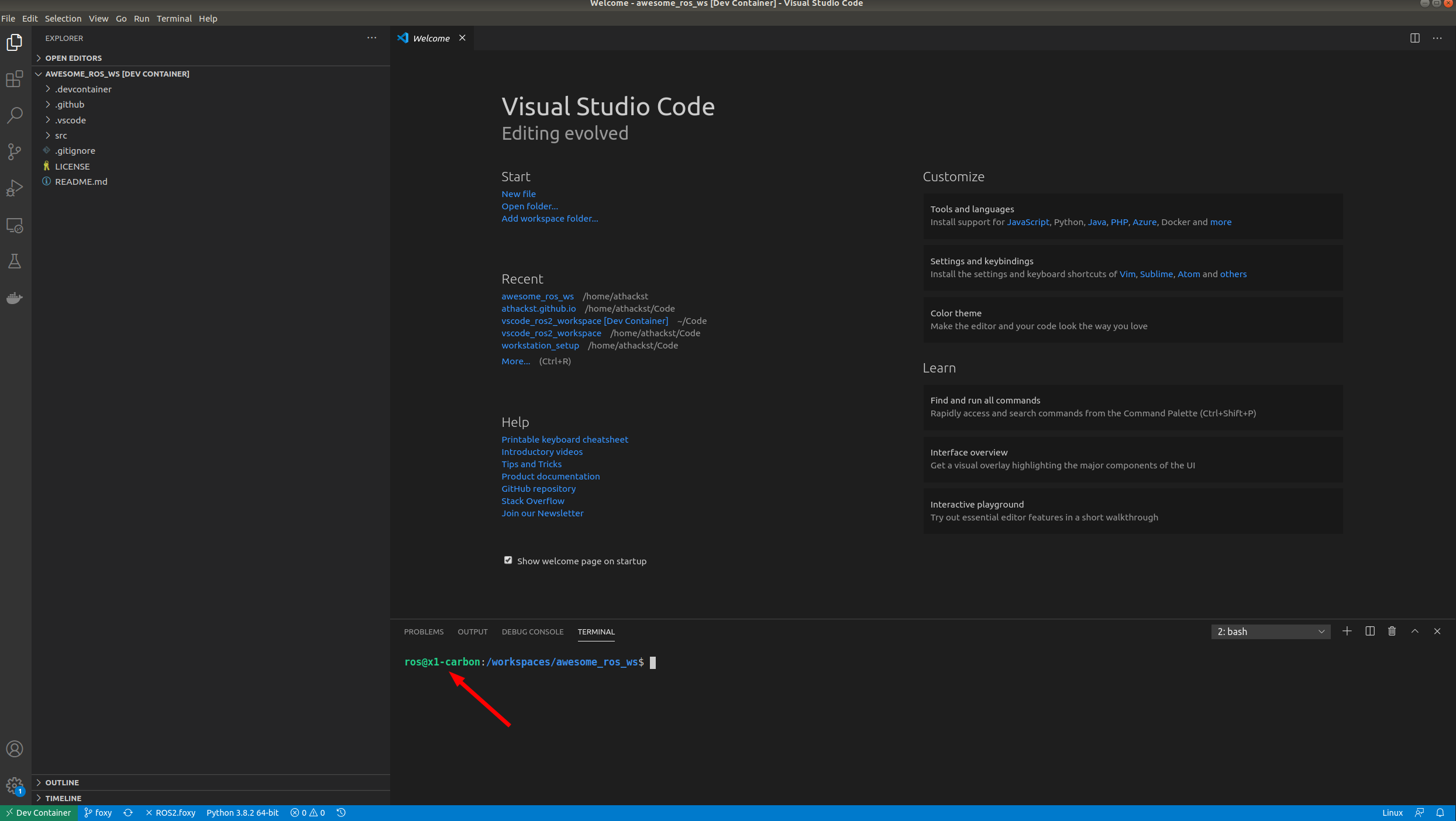
58 |
59 | - If you want to work in your docker container from terminator (which I strongly recommend), type `terminator` in the VSCode terminal.
60 |
61 | # Test that everything is working!
62 |
63 | Run Ardupilot with software in the loop (SITL):
64 | ```
65 | $ sim_vehicle.py -L RATBeach -v ArduSub --model=JSON --out=udp:0.0.0.0:14550 --console
66 | ```
67 | In another terminal (in terminator you can use ctrl+shit+e to split the terminal vertically) run:
68 | ```
69 | $ ros2 launch tudelft_hackathon bluerov_bringup.launch.py simulation:=true
70 | ```
71 |
--------------------------------------------------------------------------------
/launch/bluerov_record.launch.py:
--------------------------------------------------------------------------------
1 | from launch_ros.actions import Node
2 | from launch import LaunchDescription
3 | from launch.actions import DeclareLaunchArgument, ExecuteProcess
4 | from launch.conditions import IfCondition, UnlessCondition
5 | from launch.substitutions import LaunchConfiguration, PythonExpression
6 |
7 | def generate_launch_description():
8 | simulation_arg = LaunchConfiguration('simulation')
9 | fcu_url_arg = LaunchConfiguration('fcu_url')
10 | gcs_url_arg = LaunchConfiguration('gcs_url')
11 | system_id_arg = LaunchConfiguration('system_id')
12 | component_id_arg = LaunchConfiguration('component_id')
13 | tgt_system_arg = LaunchConfiguration('target_system_id')
14 | tgt_component_arg = LaunchConfiguration('target_component_id')
15 |
16 | simulation_arg = DeclareLaunchArgument(
17 | 'simulation',
18 | default_value='false'
19 | )
20 |
21 | gcs_url_arg = DeclareLaunchArgument(
22 | 'gcs_url',
23 | default_value='udp://@localhost:14550'
24 | )
25 |
26 | system_id_arg = DeclareLaunchArgument(
27 | 'system_id',
28 | default_value='255'
29 | )
30 |
31 | component_id_arg = DeclareLaunchArgument(
32 | 'component_id',
33 | default_value='240'
34 | )
35 |
36 | tgt_system_arg = DeclareLaunchArgument(
37 | 'target_system_id',
38 | default_value='1'
39 | )
40 |
41 | tgt_component_arg = DeclareLaunchArgument(
42 | 'target_component_id',
43 | default_value='1'
44 | )
45 |
46 | mavros_node = Node(
47 | package='mavros',
48 | executable='mavros_node',
49 | parameters=[{
50 | 'fcu_url': LaunchConfiguration('fcu_url'),
51 | 'gcs_url': LaunchConfiguration('gcs_url'),
52 | 'system_id': LaunchConfiguration('system_id'),
53 | 'component_id': LaunchConfiguration('component_id'),
54 | 'target_system_id': LaunchConfiguration('target_system_id'),
55 | 'target_component_id': LaunchConfiguration('target_component_id'),
56 | }]
57 | )
58 |
59 | ping_360_node = Node(
60 | package='ping360_sonar',
61 | executable='ping360_node',
62 | parameters=[{
63 | 'connection_type': 'udp',
64 | 'udp_address': '192.168.2.2',
65 | 'udp_port': 9092,
66 | 'fallback_emulated': False,
67 | 'publish_eco': True,
68 | 'publish_scan': True,
69 | 'publish_image': True,
70 | }],
71 | )
72 |
73 | agent_node = Node(
74 | package='tudelft_hackathon',
75 | executable='bluerov_agent.py',
76 | output='screen'
77 | )
78 |
79 | return LaunchDescription([
80 | simulation_arg,
81 | gcs_url_arg,
82 | system_id_arg,
83 | component_id_arg,
84 | tgt_system_arg,
85 | tgt_component_arg,
86 | # Real robot
87 | DeclareLaunchArgument(
88 | 'fcu_url',
89 | default_value='udp://192.168.2.1:14550@192.168.2.2:14555',
90 | condition=UnlessCondition(LaunchConfiguration('simulation'))
91 | ),
92 | # # Simulation
93 | DeclareLaunchArgument(
94 | 'fcu_url',
95 | default_value='udp://:14551@:14555',
96 | condition=IfCondition(LaunchConfiguration('simulation'))
97 | ),
98 | mavros_node,
99 | ping_360_node,
100 | ExecuteProcess(
101 | cmd=['ros2', 'bag', 'record', '-a'],
102 | output='screen'
103 | )
104 | ])
105 |
--------------------------------------------------------------------------------
/PARTICIPANTS_TODO.md:
--------------------------------------------------------------------------------
1 | # Activities to be done before the hackathon:
2 |
3 | #### Follow basic ROS2 tutorials:
4 | * [Beginner: CLI Tools](https://docs.ros.org/en/foxy/Tutorials.html#beginner-cli-tools)
5 | - [Configuring your ROS 2 environment](https://docs.ros.org/en/foxy/Tutorials/Configuring-ROS2-Environment.html)
6 | - [Understanding ROS 2 nodes](https://docs.ros.org/en/foxy/Tutorials/Understanding-ROS2-Nodes.html)
7 | - [Understanding ROS 2 topics](https://docs.ros.org/en/foxy/Tutorials/Topics/Understanding-ROS2-Topics.html)
8 | - [Understanding ROS 2 services](https://docs.ros.org/en/foxy/Tutorials/Services/Understanding-ROS2-Services.html)
9 | - [Understanding ROS 2 parameters](https://docs.ros.org/en/foxy/Tutorials/Parameters/Understanding-ROS2-Parameters.html)
10 | - [Introducing ROS 2 launch](https://docs.ros.org/en/foxy/Tutorials/Launch/CLI-Intro.html)
11 | - [Recording and playing back data](https://docs.ros.org/en/foxy/Tutorials/Ros2bag/Recording-And-Playing-Back-Data.html)
12 | * [Beginner: Client Libraries](https://docs.ros.org/en/foxy/Tutorials.html#beginner-client-libraries)
13 | - [Creating a workspace](https://docs.ros.org/en/foxy/Tutorials/Workspace/Creating-A-Workspace.html)
14 | - [Creating your first ROS 2 package](https://docs.ros.org/en/foxy/Tutorials/Creating-Your-First-ROS2-Package.html)
15 | - [Writing a simple publisher and subscriber (Python)](https://docs.ros.org/en/foxy/Tutorials/Writing-A-Simple-Py-Publisher-And-Subscriber.html)
16 | - [Writing a simple service and client (Python)](https://docs.ros.org/en/foxy/Tutorials/Writing-A-Simple-Py-Service-And-Client.html)
17 |
18 | #### Follow basic Ignition tutorials
19 | * [Setting-up a Robot Simulation (Ignition Gazebo)](https://docs.ros.org/en/foxy/Tutorials/Simulators/Ignition/Setting-up-a-Robot-Simulation-Ignition.html)
20 |
21 | #### Install ROS2 workspace for the hackathon locally, or run the docker image beforehand to make sure it is working
22 |
23 | Read [this](https://github.com/remaro-network/tudelft_hackathon#installation) first
24 |
25 | * [Install locally instructions](https://github.com/remaro-network/tudelft_hackathon#install-locally)
26 | * Docker:
27 | - [Install Docker prereqs](https://github.com/remaro-network/tudelft_hackathon#install-prerequisites-to-run-with-docker)
28 | - [Docker CLI instructions](https://github.com/remaro-network/tudelft_hackathon#run-it-with-docker-via-cli)
29 | - [Docker with VSCode instructions](https://github.com/remaro-network/tudelft_hackathon#run-it-with-docker-with-vscode)
30 |
31 | **Bugs:** If you find bugs, please open an Issue with a detailed explanation of the problem, or message @rezenders.
32 |
33 | #### For the more interested participants, reproduce everything and suggest how to improve the training
34 |
35 | * For this, it is strongly recommend to do so by opening issues and pull requests
36 | * There are some issues already open. That is a good starting point
37 |
38 | # Activities to be done during hackathon:
39 |
40 | #### Run bluerov agent
41 |
42 | * Run the bluerov agent both in the real BlueROV2 and in Gazebo (Ignition)
43 | * Complete the [potential_avoidance]((https://github.com/remaro-network/tudelft_hackathon/blob/ros2/scripts/potential_avoidance.py) code and run it both in the real BlueROV2 and Gazebo (Ignition). Issue [#36](https://github.com/remaro-network/tudelft_hackathon/issues/36).
44 |
45 | #### Improve the system
46 | Suggestions:
47 | * Issues marked with `hackathon_task` label. You can find them in this [project tab](https://github.com/remaro-network/tudelft_hackathon/projects/2)
48 | * Better avoidance algorithm
49 | * Adjust velocity parameters and sonar "field-of-view"
50 | * More elaborated world
51 | * Improve launch files
52 | * Improve formatting
53 | * Improve documentation
54 | * Add tests
55 |
--------------------------------------------------------------------------------
/launch/bluerov_bringup_no_ign.launch.py:
--------------------------------------------------------------------------------
1 | import os
2 |
3 | from ament_index_python.packages import get_package_share_directory
4 |
5 | from launch_ros.actions import Node
6 | from launch import LaunchDescription
7 | from launch.actions import DeclareLaunchArgument
8 | from launch.actions import IncludeLaunchDescription
9 | from launch.conditions import IfCondition, UnlessCondition
10 | from launch.substitutions import LaunchConfiguration, PythonExpression
11 | from launch.launch_description_sources import PythonLaunchDescriptionSource
12 |
13 |
14 | def generate_launch_description():
15 | simulation_arg = LaunchConfiguration('simulation')
16 | fcu_url_arg = LaunchConfiguration('fcu_url')
17 | gcs_url_arg = LaunchConfiguration('gcs_url')
18 | system_id_arg = LaunchConfiguration('system_id')
19 | component_id_arg = LaunchConfiguration('component_id')
20 | tgt_system_arg = LaunchConfiguration('target_system_id')
21 | tgt_component_arg = LaunchConfiguration('target_component_id')
22 |
23 | simulation_arg = DeclareLaunchArgument(
24 | 'simulation',
25 | default_value='true'
26 | )
27 |
28 | gcs_url_arg = DeclareLaunchArgument(
29 | 'gcs_url',
30 | default_value='udp://@localhost:14550'
31 | )
32 |
33 | system_id_arg = DeclareLaunchArgument(
34 | 'system_id',
35 | default_value='255'
36 | )
37 |
38 | component_id_arg = DeclareLaunchArgument(
39 | 'component_id',
40 | default_value='240'
41 | )
42 |
43 | tgt_system_arg = DeclareLaunchArgument(
44 | 'target_system_id',
45 | default_value='1'
46 | )
47 |
48 | tgt_component_arg = DeclareLaunchArgument(
49 | 'target_component_id',
50 | default_value='1'
51 | )
52 |
53 | mavros_node = Node(
54 | package='mavros',
55 | executable='mavros_node',
56 | parameters=[{
57 | 'fcu_url': LaunchConfiguration('fcu_url'),
58 | 'gcs_url': LaunchConfiguration('gcs_url'),
59 | 'system_id': LaunchConfiguration('system_id'),
60 | 'component_id': LaunchConfiguration('component_id'),
61 | 'target_system_id': LaunchConfiguration('target_system_id'),
62 | 'target_component_id': LaunchConfiguration('target_component_id'),
63 | }]
64 | )
65 |
66 | agent_node = Node(
67 | package='tudelft_hackathon',
68 | executable='potential_avoidance.py',
69 | output='screen'
70 | )
71 |
72 | return LaunchDescription([
73 | simulation_arg,
74 | gcs_url_arg,
75 | system_id_arg,
76 | component_id_arg,
77 | tgt_system_arg,
78 | tgt_component_arg,
79 | # Real robot
80 | DeclareLaunchArgument(
81 | 'fcu_url',
82 | default_value='udp://192.168.2.1:14550@192.168.2.2:14555',
83 | condition=UnlessCondition(LaunchConfiguration('simulation'))
84 | ),
85 | # Simulation
86 | DeclareLaunchArgument(
87 | 'fcu_url',
88 | default_value='udp://:14551@:14555',
89 | condition=IfCondition(LaunchConfiguration('simulation'))
90 | ),
91 | mavros_node,
92 | Node(
93 | package='ping360_sonar',
94 | executable='ping360_node',
95 | parameters=[{
96 | 'connection_type': 'udp',
97 | 'udp_address': '192.168.2.2',
98 | 'udp_port': 9092,
99 | 'fallback_emulated': False,
100 | 'publish_echo': True,
101 | 'publish_scan': True,
102 | 'publish_image': True,
103 | }],
104 | condition=UnlessCondition(LaunchConfiguration('simulation'))
105 | ),
106 | agent_node,
107 | ])
108 |
--------------------------------------------------------------------------------
/.github/workflows/container.yaml:
--------------------------------------------------------------------------------
1 | # This workflow uses actions that are not certified by GitHub.
2 | # They are provided by a third-party and are governed by
3 | # separate terms of service, privacy policy, and support
4 | # documentation.
5 |
6 | # GitHub recommends pinning actions to a commit SHA.
7 | # To get a newer version, you will need to update the SHA.
8 | # You can also reference a tag or branch, but the action may change without warning.
9 |
10 | name: Docker Images
11 |
12 | on:
13 | push:
14 | branches:
15 | - ros2
16 | tags:
17 | - 'v*'
18 |
19 | env:
20 | REGISTRY: ghcr.io
21 | IMAGE_NAME: ${{ github.repository }}
22 |
23 | jobs:
24 | build-and-push-image:
25 | runs-on: ubuntu-latest
26 | permissions:
27 | contents: read
28 | packages: write
29 |
30 | steps:
31 | - name: Checkout repository
32 | uses: actions/checkout@v3
33 |
34 | - name: Log in to the Container registry
35 | uses: docker/login-action@f054a8b539a109f9f41c372932f1ae047eff08c9
36 | with:
37 | registry: ${{ env.REGISTRY }}
38 | username: ${{ github.actor }}
39 | password: ${{ secrets.GITHUB_TOKEN }}
40 |
41 | - name: Extract metadata (tags, labels) for Docker
42 | id: meta
43 | uses: docker/metadata-action@98669ae865ea3cffbcbaa878cf57c20bbf1c6c38
44 | with:
45 | images: ${{ env.REGISTRY }}/${{ env.IMAGE_NAME }}
46 | tags: |
47 | type=ref,event=branch
48 | type=ref,event=pr
49 | type=semver,pattern={{version}}
50 | type=semver,pattern={{major}}.{{minor}}
51 |
52 | - name: Build and push gazebo garden image with ros humble
53 | uses: docker/build-push-action@v4
54 | with:
55 | context: dockerfiles/ignition/ignition-humble/
56 | push: true
57 | tags: ${{ env.REGISTRY }}/remaro-network/ignition-humble:latest
58 | labels: latest
59 |
60 | - name: Build and push ignition-ardusub-humble image
61 | uses: docker/build-push-action@v4
62 | with:
63 | context: dockerfiles/ignition-ardusub/ignition-ardusub-humble/
64 | push: true
65 | build-args: BASE_IMAGE=${{ env.REGISTRY }}/remaro-network/ignition-humble:latest
66 | tags: ${{ env.REGISTRY }}/remaro-network/ignition-ardusub-humble:latest
67 |
68 | - name: Build and push ignition hackathon image
69 | uses: docker/build-push-action@v4
70 | with:
71 | context: dockerfiles/ignition-hackathon/ignition-hackathon-humble/
72 | push: true
73 | tags: ${{ env.REGISTRY }}/remaro-network/tudelft_hackathon_base:latest
74 | # tags: ${{ steps.meta.outputs.tags }}
75 | # labels: ${{ steps.meta.outputs.labels }}
76 | build-args: BASE_IMAGE=${{ env.REGISTRY }}/remaro-network/ignition-ardusub-humble:latest
77 |
78 | - name: Build and push ignition hackathon non nvidia image
79 | uses: docker/build-push-action@v4
80 | with:
81 | context: dockerfiles/ignition-hackathon-gpus/ignition-hackathon-non-nvidia/ignition-hackathon-non-nvidia-humble/
82 | push: true
83 | tags: ${{ env.REGISTRY }}/remaro-network/tudelft_hackathon:non-nvidia
84 | build-args: BASE_IMAGE=${{ env.REGISTRY }}/remaro-network/tudelft_hackathon_base:latest
85 |
86 | - name: Build and push ignition hackathon nvidia image
87 | uses: docker/build-push-action@v4
88 | with:
89 | context: dockerfiles/ignition-hackathon-gpus/ignition-hackathon-nvidia/ignition-hackathon-nvidia-humble/
90 | push: true
91 | # tags: ${{ steps.meta.outputs.tags }}
92 | # labels: ${{ steps.meta.outputs.labels }}
93 | tags: ${{ env.REGISTRY }}/remaro-network/tudelft_hackathon:nvidia
94 | build-args: BASE_IMAGE=${{ env.REGISTRY }}/remaro-network/tudelft_hackathon_base:latest
95 |
--------------------------------------------------------------------------------
/launch/bluerov_bringup.launch.py:
--------------------------------------------------------------------------------
1 | import os
2 |
3 | from ament_index_python.packages import get_package_share_directory
4 |
5 | from launch_ros.actions import Node
6 | from launch import LaunchDescription
7 | from launch.actions import DeclareLaunchArgument
8 | from launch.actions import IncludeLaunchDescription
9 | from launch.conditions import IfCondition, UnlessCondition
10 | from launch.substitutions import LaunchConfiguration, PythonExpression
11 | from launch.launch_description_sources import AnyLaunchDescriptionSource
12 | from launch.launch_description_sources import PythonLaunchDescriptionSource
13 |
14 |
15 | def generate_launch_description():
16 | pkg_tudelft_hackathon = get_package_share_directory('tudelft_hackathon')
17 |
18 | simulation_arg = LaunchConfiguration('simulation')
19 | fcu_url_arg = LaunchConfiguration('fcu_url')
20 | gcs_url_arg = LaunchConfiguration('gcs_url')
21 | tgt_system_arg = LaunchConfiguration('target_system_id')
22 | tgt_component_arg = LaunchConfiguration('target_component_id')
23 |
24 | simulation_arg = DeclareLaunchArgument(
25 | 'simulation',
26 | default_value='true'
27 | )
28 |
29 | gcs_url_arg = DeclareLaunchArgument(
30 | 'gcs_url',
31 | default_value='udp://@localhost:14550'
32 | )
33 |
34 | tgt_system_arg = DeclareLaunchArgument(
35 | 'tgt_system',
36 | default_value='1'
37 | )
38 |
39 | tgt_component_arg = DeclareLaunchArgument(
40 | 'tgt_component',
41 | default_value='1'
42 | )
43 |
44 | mavros_path = get_package_share_directory('mavros')
45 | mavros_launch_path = os.path.join(
46 | mavros_path, 'launch', 'node.launch')
47 | hackathon_apm_config_path = os.path.join(
48 | pkg_tudelft_hackathon, 'launch', 'apm_config.yaml')
49 | hackathon_apm_plugin_path = os.path.join(
50 | pkg_tudelft_hackathon, 'launch', 'apm_pluginlists.yaml')
51 | mavros_node = IncludeLaunchDescription(
52 | AnyLaunchDescriptionSource(mavros_launch_path),
53 | launch_arguments={
54 | 'fcu_url': LaunchConfiguration('fcu_url'),
55 | 'gcs_url': LaunchConfiguration('gcs_url'),
56 | 'tgt_system': LaunchConfiguration('tgt_system'),
57 | 'tgt_component': LaunchConfiguration('tgt_component'),
58 | 'config_yaml': hackathon_apm_config_path,
59 | 'pluginlists_yaml': hackathon_apm_plugin_path,
60 | }.items()
61 | )
62 |
63 | agent_node = Node(
64 | package='tudelft_hackathon',
65 | executable='random_wall_avoidance.py',
66 | output='screen'
67 | )
68 |
69 | return LaunchDescription([
70 | simulation_arg,
71 | gcs_url_arg,
72 | tgt_system_arg,
73 | tgt_component_arg,
74 | # Real robot
75 | DeclareLaunchArgument(
76 | 'fcu_url',
77 | default_value='udp://192.168.2.1:14550@192.168.2.2:14555',
78 | condition=UnlessCondition(LaunchConfiguration('simulation'))
79 | ),
80 | # Simulation
81 | DeclareLaunchArgument(
82 | 'fcu_url',
83 | default_value='udp://:14551@:14555',
84 | condition=IfCondition(LaunchConfiguration('simulation'))
85 | ),
86 | IncludeLaunchDescription(
87 | PythonLaunchDescriptionSource(
88 | os.path.join(pkg_tudelft_hackathon,
89 | 'launch',
90 | 'bluerov_ign_sim.launch.py')),
91 | condition=IfCondition(LaunchConfiguration('simulation'))
92 | ),
93 | mavros_node,
94 | Node(
95 | package='ping360_sonar',
96 | executable='ping360_node',
97 | parameters=[{
98 | 'angle_sector': 90,
99 | 'connection_type': 'udp',
100 | 'udp_address': '192.168.2.2',
101 | 'udp_port': 9092,
102 | 'fallback_emulated': False,
103 | 'publish_echo': True,
104 | 'publish_scan': True,
105 | 'publish_image': True,
106 | }],
107 | condition=UnlessCondition(LaunchConfiguration('simulation'))
108 | ),
109 | agent_node,
110 | ])
111 |
--------------------------------------------------------------------------------
/scripts/potential_avoidance.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 | import sys
3 | import rclpy
4 | import random
5 | import threading
6 | import numpy as np
7 |
8 | from rclpy.node import Node
9 |
10 | from sensor_msgs.msg import LaserScan
11 | from mavros_wrapper.ardusub_wrapper import *
12 |
13 | def laser_scan_cb(msg, ardusub):
14 | forward_speed = 1 # Maximum forward velocity
15 |
16 | # TODO: Do something with the sonar msg in order to make the robot not
17 | # crash into the walls
18 | #
19 | # CHEAT:
20 | # LaserScan msg definition can be found here: https://docs.ros2.org/latest/api/sensor_msgs/msg/LaserScan.html
21 | # Before checking the solution provided, check this example:
22 | # https://github.com/gazebosim/docs/blob/master/citadel/sensors.md#avoid-the-wall
23 |
24 | # Compute the potential vector
25 | sonar_data = msg
26 | angles = np.linspace(sonar_data.angle_min, sonar_data.angle_max, num=len(sonar_data.ranges))
27 | potentials_x = np.multiply(1/np.asarray(sonar_data.ranges)**2, np.cos(angles))
28 | sum_potentials_x = np.sum(potentials_x)
29 |
30 | print("angle_min: ", sonar_data.angle_min)
31 | print("angle_max: ", sonar_data.angle_max)
32 | print("Angles: ", angles)
33 |
34 | sum_potentials_angles = np.sum(np.cos(angles))
35 | print("Sum of Cosine of Angles: ", sum_potentials_angles)
36 |
37 | potentials_y = np.multiply(1/np.asarray(sonar_data.ranges)**2, np.sin(angles))
38 | sum_potentials_y = np.sum(potentials_y)
39 |
40 | p = (sum_potentials_x,sum_potentials_y)
41 |
42 | # set some gains
43 | k_p = 1/sum_potentials_angles
44 | # k_p = 1/sum_potentials_x
45 | k_phi = -2
46 |
47 | # Function for computing the new velocity vector
48 | potential_velocity(forward_speed,(p),k_p,k_phi)
49 |
50 | def potential_velocity(max_vel,p,K_p,K_phi):
51 | """
52 | This function sends velocity commands to ardusub according to
53 | the maximum velocity set for the robot
54 | and a potential repulsive field generated by an obstacle
55 | Parameters:
56 |
57 | -max_vel: maximum forward velocity (without obstacles)
58 | -p: (px,py) values generated by the potential field in the x and y axis, respectively
59 | -K_p: gain that regulates linear velocity
60 | -K_phi: gain that regulates angular velocity
61 |
62 | """
63 | p_x,p_y = p
64 | forward_vel = max_vel - K_p * p_x
65 | # compute the angle between linear velocity and vy generated by potential obstacles
66 | yaw_vel = K_phi*np.arctan(float(- K_p * p_y/forward_vel))
67 |
68 | # Write velocities in channels
69 | # The previous values should be between -1 and 1.
70 | ardusub.toogle_rc_override(True) # start overriding RC
71 | ardusub.set_rc_override_channels(forward=forward_vel, yaw = yaw_vel) # set values to override
72 | print("forward_vel : ",forward_vel)
73 | print("yaw_vel : ",yaw_vel)
74 | print("kp : ",K_p)
75 |
76 | if __name__ == '__main__':
77 | print("Starting wall avoidance. Let's swim!")
78 |
79 | # Initialize ros node
80 | rclpy.init(args=sys.argv)
81 |
82 | ardusub = BlueROVArduSubWrapper("ardusub_node")
83 |
84 | thread = threading.Thread(target=rclpy.spin, args=(ardusub, ), daemon=True)
85 | thread.start()
86 |
87 | # TODO: Set flight mode to MANUAL, STABILIZE or DEPTH HOLD
88 | service_timer = ardusub.create_rate(2)
89 | while ardusub.status.mode != "ALT_HOLD":
90 | ardusub.set_mode("ALT_HOLD")
91 | service_timer.sleep()
92 | print("Manual mode selected")
93 |
94 | # TODO: Arm motors
95 | while ardusub.status.armed == False:
96 | ardusub.arm_motors(True)
97 | service_timer.sleep()
98 |
99 | print("Thrusters armed")
100 |
101 | print("Initializing mission")
102 |
103 | # TODO: start publishing on /mavros/rc/override
104 | ardusub.toogle_rc_override(True)
105 | ardusub.set_rc_override_channels(throttle=0.0, pitch=0.0, forward=0.01)
106 | # TODO: start moving forward
107 |
108 | # Sonar subscriber
109 | laser_subscriber = ardusub.create_subscription(
110 | LaserScan, '/scan', (lambda msg: laser_scan_cb(msg, ardusub)), 20)
111 |
112 | rate = ardusub.create_rate(2)
113 | try:
114 | while rclpy.ok():
115 | rate.sleep()
116 | except KeyboardInterrupt:
117 | pass
118 | ardusub.arm_motors(False) # better safe than sorry
119 | ardusub.destroy_node()
120 | rclpy.shutdown()
121 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/.vscode/settings.json:
--------------------------------------------------------------------------------
1 | {
2 | "editor.tabSize": 8,
3 | "editor.rulers": [
4 | 100
5 | ],
6 | "files.associations": {
7 | "*.inc": "php",
8 | "*.repos": "yaml",
9 | "*.world": "xml",
10 | "*.xacro": "xml",
11 | "cctype": "cpp",
12 | "clocale": "cpp",
13 | "cmath": "cpp",
14 | "csignal": "cpp",
15 | "cstdarg": "cpp",
16 | "cstddef": "cpp",
17 | "cstdio": "cpp",
18 | "cstdlib": "cpp",
19 | "cstring": "cpp",
20 | "ctime": "cpp",
21 | "cwchar": "cpp",
22 | "cwctype": "cpp",
23 | "array": "cpp",
24 | "atomic": "cpp",
25 | "strstream": "cpp",
26 | "bit": "cpp",
27 | "*.tcc": "cpp",
28 | "bitset": "cpp",
29 | "chrono": "cpp",
30 | "complex": "cpp",
31 | "condition_variable": "cpp",
32 | "cstdint": "cpp",
33 | "deque": "cpp",
34 | "list": "cpp",
35 | "map": "cpp",
36 | "set": "cpp",
37 | "unordered_map": "cpp",
38 | "vector": "cpp",
39 | "exception": "cpp",
40 | "algorithm": "cpp",
41 | "functional": "cpp",
42 | "iterator": "cpp",
43 | "memory": "cpp",
44 | "memory_resource": "cpp",
45 | "numeric": "cpp",
46 | "optional": "cpp",
47 | "random": "cpp",
48 | "ratio": "cpp",
49 | "string": "cpp",
50 | "string_view": "cpp",
51 | "system_error": "cpp",
52 | "tuple": "cpp",
53 | "type_traits": "cpp",
54 | "utility": "cpp",
55 | "fstream": "cpp",
56 | "future": "cpp",
57 | "initializer_list": "cpp",
58 | "iomanip": "cpp",
59 | "iosfwd": "cpp",
60 | "iostream": "cpp",
61 | "istream": "cpp",
62 | "limits": "cpp",
63 | "mutex": "cpp",
64 | "new": "cpp",
65 | "ostream": "cpp",
66 | "shared_mutex": "cpp",
67 | "sstream": "cpp",
68 | "stdexcept": "cpp",
69 | "streambuf": "cpp",
70 | "thread": "cpp",
71 | "cfenv": "cpp",
72 | "cinttypes": "cpp",
73 | "typeindex": "cpp",
74 | "typeinfo": "cpp",
75 | "variant": "cpp",
76 | "csetjmp": "cpp",
77 | "codecvt": "cpp",
78 | "unordered_set": "cpp",
79 | "regex": "cpp",
80 | "hash_map": "cpp",
81 | "hash_set": "cpp",
82 | "slist": "cpp",
83 | "scoped_allocator": "cpp",
84 | "valarray": "cpp"
85 | },
86 | "python.analysis.extraPaths": [
87 | "/opt/ros/foxy/lib/python3.8/site-packages/"
88 | ],
89 | // Autocomplete from ros python packages
90 | "python.autoComplete.extraPaths": [
91 | "/opt/ros/foxy/lib/python3.8/site-packages/"
92 | ],
93 | // Environment file lets vscode find python files within workspace
94 | "python.envFile": "${workspaceFolder}/.env",
95 | // Use the system installed version of autopep8
96 | "python.formatting.autopep8Path": "/usr/bin/autopep8",
97 | "python.formatting.autopep8Args": [
98 | "--max-line-length=100"
99 | ],
100 | "C_Cpp.default.intelliSenseMode": "clang-x64",
101 | "C_Cpp.formatting": "Disabled",
102 | "uncrustify.configPath.linux": "/opt/ros/foxy/lib/python3.8/site-packages/ament_uncrustify/configuration/ament_code_style.cfg",
103 | "[cpp]": {
104 | "editor.defaultFormatter": "zachflower.uncrustify"
105 | },
106 | "search.exclude": {
107 | "**/node_modules": true,
108 | "**/bower_components": true,
109 | "**/*.code-search": true,
110 | "**/build": true,
111 | "**/install": true,
112 | "**/log": true
113 | },
114 | "cSpell.words": [
115 | "athackst",
116 | "autopep",
117 | "cmake",
118 | "cppcheck",
119 | "cpplint",
120 | "DCMAKE",
121 | "deque",
122 | "devcontainer",
123 | "ints",
124 | "noqa",
125 | "pytest",
126 | "rclcpp",
127 | "rclpy",
128 | "repos",
129 | "rosdep",
130 | "rosdistro",
131 | "rosidl",
132 | "RTPS",
133 | "uncrustify",
134 | "Wextra",
135 | "Wpedantic",
136 | "xmllint"
137 | ],
138 | "cSpell.allowCompoundWords": true,
139 | "cSpell.ignorePaths": [
140 | "**/package-lock.json",
141 | "**/node_modules/**",
142 | "**/vscode-extension/**",
143 | "**/.git/objects/**",
144 | ".vscode",
145 | ".vscode-insiders",
146 | ".devcontainer/devcontainer.json"
147 | ],
148 | "ros.distro": "noetic",
149 | }
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/ros1_ws/src/beginner_tutorials/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 3.0.2)
2 | project(beginner_tutorials)
3 |
4 | ## Compile as C++11, supported in ROS Kinetic and newer
5 | # add_compile_options(-std=c++11)
6 |
7 | ## Find catkin macros and libraries
8 | ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
9 | ## is used, also find other catkin packages
10 | find_package(catkin REQUIRED COMPONENTS
11 | roscpp
12 | rospy
13 | std_msgs
14 | )
15 |
16 | ## System dependencies are found with CMake's conventions
17 | # find_package(Boost REQUIRED COMPONENTS system)
18 |
19 |
20 | ## Uncomment this if the package has a setup.py. This macro ensures
21 | ## modules and global scripts declared therein get installed
22 | ## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
23 | # catkin_python_setup()
24 |
25 | ################################################
26 | ## Declare ROS messages, services and actions ##
27 | ################################################
28 |
29 | ## To declare and build messages, services or actions from within this
30 | ## package, follow these steps:
31 | ## * Let MSG_DEP_SET be the set of packages whose message types you use in
32 | ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
33 | ## * In the file package.xml:
34 | ## * add a build_depend tag for "message_generation"
35 | ## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
36 | ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
37 | ## but can be declared for certainty nonetheless:
38 | ## * add a exec_depend tag for "message_runtime"
39 | ## * In this file (CMakeLists.txt):
40 | ## * add "message_generation" and every package in MSG_DEP_SET to
41 | ## find_package(catkin REQUIRED COMPONENTS ...)
42 | ## * add "message_runtime" and every package in MSG_DEP_SET to
43 | ## catkin_package(CATKIN_DEPENDS ...)
44 | ## * uncomment the add_*_files sections below as needed
45 | ## and list every .msg/.srv/.action file to be processed
46 | ## * uncomment the generate_messages entry below
47 | ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
48 |
49 | ## Generate messages in the 'msg' folder
50 | # add_message_files(
51 | # FILES
52 | # Message1.msg
53 | # Message2.msg
54 | # )
55 |
56 | ## Generate services in the 'srv' folder
57 | # add_service_files(
58 | # FILES
59 | # Service1.srv
60 | # Service2.srv
61 | # )
62 |
63 | ## Generate actions in the 'action' folder
64 | # add_action_files(
65 | # FILES
66 | # Action1.action
67 | # Action2.action
68 | # )
69 |
70 | ## Generate added messages and services with any dependencies listed here
71 | # generate_messages(
72 | # DEPENDENCIES
73 | # std_msgs
74 | # )
75 |
76 | ################################################
77 | ## Declare ROS dynamic reconfigure parameters ##
78 | ################################################
79 |
80 | ## To declare and build dynamic reconfigure parameters within this
81 | ## package, follow these steps:
82 | ## * In the file package.xml:
83 | ## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
84 | ## * In this file (CMakeLists.txt):
85 | ## * add "dynamic_reconfigure" to
86 | ## find_package(catkin REQUIRED COMPONENTS ...)
87 | ## * uncomment the "generate_dynamic_reconfigure_options" section below
88 | ## and list every .cfg file to be processed
89 |
90 | ## Generate dynamic reconfigure parameters in the 'cfg' folder
91 | # generate_dynamic_reconfigure_options(
92 | # cfg/DynReconf1.cfg
93 | # cfg/DynReconf2.cfg
94 | # )
95 |
96 | ###################################
97 | ## catkin specific configuration ##
98 | ###################################
99 | ## The catkin_package macro generates cmake config files for your package
100 | ## Declare things to be passed to dependent projects
101 | ## INCLUDE_DIRS: uncomment this if your package contains header files
102 | ## LIBRARIES: libraries you create in this project that dependent projects also need
103 | ## CATKIN_DEPENDS: catkin_packages dependent projects also need
104 | ## DEPENDS: system dependencies of this project that dependent projects also need
105 | catkin_package(
106 | # INCLUDE_DIRS include
107 | # LIBRARIES beginner_tutorials
108 | # CATKIN_DEPENDS roscpp rospy std_msgs
109 | # DEPENDS system_lib
110 | )
111 |
112 | ###########
113 | ## Build ##
114 | ###########
115 |
116 | ## Specify additional locations of header files
117 | ## Your package locations should be listed before other locations
118 | include_directories(
119 | # include
120 | ${catkin_INCLUDE_DIRS}
121 | )
122 |
123 | ## Declare a C++ library
124 | # add_library(${PROJECT_NAME}
125 | # src/${PROJECT_NAME}/beginner_tutorials.cpp
126 | # )
127 |
128 | ## Add cmake target dependencies of the library
129 | ## as an example, code may need to be generated before libraries
130 | ## either from message generation or dynamic reconfigure
131 | # add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
132 |
133 | ## Declare a C++ executable
134 | ## With catkin_make all packages are built within a single CMake context
135 | ## The recommended prefix ensures that target names across packages don't collide
136 | # add_executable(${PROJECT_NAME}_node src/beginner_tutorials_node.cpp)
137 |
138 | ## Rename C++ executable without prefix
139 | ## The above recommended prefix causes long target names, the following renames the
140 | ## target back to the shorter version for ease of user use
141 | ## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
142 | # set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
143 |
144 | ## Add cmake target dependencies of the executable
145 | ## same as for the library above
146 | # add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
147 |
148 | ## Specify libraries to link a library or executable target against
149 | # target_link_libraries(${PROJECT_NAME}_node
150 | # ${catkin_LIBRARIES}
151 | # )
152 |
153 | #############
154 | ## Install ##
155 | #############
156 |
157 | # all install targets should use catkin DESTINATION variables
158 | # See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
159 |
160 | ## Mark executable scripts (Python etc.) for installation
161 | ## in contrast to setup.py, you can choose the destination
162 | # catkin_install_python(PROGRAMS
163 | # scripts/my_python_script
164 | # DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
165 | # )
166 |
167 | ## Mark executables for installation
168 | ## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
169 | # install(TARGETS ${PROJECT_NAME}_node
170 | # RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
171 | # )
172 |
173 | ## Mark libraries for installation
174 | ## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
175 | # install(TARGETS ${PROJECT_NAME}
176 | # ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
177 | # LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
178 | # RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
179 | # )
180 |
181 | ## Mark cpp header files for installation
182 | # install(DIRECTORY include/${PROJECT_NAME}/
183 | # DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
184 | # FILES_MATCHING PATTERN "*.h"
185 | # PATTERN ".svn" EXCLUDE
186 | # )
187 |
188 | ## Mark other files for installation (e.g. launch and bag files, etc.)
189 | # install(FILES
190 | # # myfile1
191 | # # myfile2
192 | # DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
193 | # )
194 |
195 | #############
196 | ## Testing ##
197 | #############
198 |
199 | ## Add gtest based cpp test target and link libraries
200 | # catkin_add_gtest(${PROJECT_NAME}-test test/test_beginner_tutorials.cpp)
201 | # if(TARGET ${PROJECT_NAME}-test)
202 | # target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
203 | # endif()
204 |
205 | ## Add folders to be run by python nosetests
206 | # catkin_add_nosetests(test)
207 |
208 |
209 | add_executable(talker src/talker.cpp)
210 | target_link_libraries(talker ${catkin_LIBRARIES})
--------------------------------------------------------------------------------
/launch/apm_config.yaml:
--------------------------------------------------------------------------------
1 | # Common configuration for APM2 autopilot
2 | #
3 | # node:
4 | /mavros/**:
5 | ros__parameters:
6 | startup_px4_usb_quirk: false
7 | system_id: 255
8 | component_id: 240
9 |
10 | # --- system plugins ---
11 |
12 | # sys_status & sys_time connection options
13 | /mavros/**/conn:
14 | ros__parameters:
15 | heartbeat_rate: 1.0 # send heartbeat rate in Hertz
16 | heartbeat_mav_type: "ONBOARD_CONTROLLER"
17 | timeout: 10.0 # heartbeat timeout in seconds
18 | timesync_rate: 10.0 # TIMESYNC rate in Hertz (feature disabled if 0.0)
19 | system_time_rate: 1.0 # send system time to FCU rate in Hertz (disabled if 0.0)
20 |
21 | # sys_status
22 | /mavros/**/sys:
23 | ros__parameters:
24 | min_voltage: [10.0] # diagnostics min voltage, use a vector i.e. [16.2, 16.0] for multiple batteries, up-to 10 are supported
25 | # to achieve the same on a ROS launch file do: [16.2, 16.0]
26 | disable_diag: false # disable all sys_status diagnostics, except heartbeat
27 |
28 | # sys_time
29 | /mavros/**/time:
30 | ros__parameters:
31 | time_ref_source: "fcu" # time_reference source
32 | timesync_mode: MAVLINK
33 | timesync_avg_alpha: 0.6 # timesync averaging factor
34 |
35 | # --- mavros plugins (alphabetical order) ---
36 |
37 | # 3dr_radio
38 | /mavros/**/tdr_radio:
39 | ros__parameters:
40 | low_rssi: 40 # raw rssi lower level for diagnostics
41 |
42 | # actuator_control
43 | # None
44 |
45 | # command
46 | /mavros/**/cmd:
47 | ros__parameters:
48 | use_comp_id_system_control: false # quirk for some old FCUs
49 |
50 | # dummy
51 | # None
52 |
53 | # ftp
54 | # None
55 |
56 | # global_position
57 | /mavros/**/global_position:
58 | ros__parameters:
59 | frame_id: "map" # origin frame
60 | child_frame_id: "base_link" # body-fixed frame
61 | rot_covariance: 99999.0 # covariance for attitude?
62 | gps_uere: 1.0 # User Equivalent Range Error (UERE) of GPS sensor (m)
63 | use_relative_alt: true # use relative altitude for local coordinates
64 | tf.send: false # send TF?
65 | tf.frame_id: "map" # TF frame_id
66 | tf.global_frame_id: "earth" # TF earth frame_id
67 | tf.child_frame_id: "base_link" # TF child_frame_id
68 |
69 | # imu_pub
70 | /mavros/**/imu:
71 | ros__parameters:
72 | frame_id: "base_link"
73 | # need find actual values
74 | linear_acceleration_stdev: 0.0003
75 | angular_velocity_stdev: 0.0003490659 # 0.02 degrees
76 | orientation_stdev: 1.0
77 | magnetic_stdev: 0.0
78 |
79 | # local_position
80 | /mavros/**/local_position:
81 | ros__parameters:
82 | frame_id: "map"
83 | tf.send: false
84 | tf.frame_id: "map"
85 | tf.child_frame_id: "base_link"
86 | tf.send_fcu: false
87 |
88 | # param
89 | # None, used for FCU params
90 |
91 | # rc_io
92 | # None
93 |
94 | # setpoint_accel
95 | /mavros/**/setpoint_accel:
96 | ros__parameters:
97 | send_force: false
98 |
99 | # setpoint_attitude
100 | /mavros/**/setpoint_attitude:
101 | ros__parameters:
102 | reverse_thrust: false # allow reversed thrust
103 | use_quaternion: false # enable PoseStamped topic subscriber
104 | tf.listen: false # enable tf listener (disable topic subscribers)
105 | tf.frame_id: "map"
106 | tf.child_frame_id: "target_attitude"
107 | tf.rate_limit: 50.0
108 |
109 | # setpoint_raw
110 | /mavros/**/setpoint_raw:
111 | ros__parameters:
112 | thrust_scaling: 1.0 # specify thrust scaling (normalized, 0 to 1) for thrust (like PX4)
113 |
114 | # setpoint_position
115 | /mavros/**/setpoint_position:
116 | ros__parameters:
117 | tf.listen: false # enable tf listener (disable topic subscribers)
118 | tf.frame_id: "map"
119 | tf.child_frame_id: "target_position"
120 | tf.rate_limit: 50.0
121 | mav_frame: LOCAL_NED
122 |
123 | # guided_target
124 | /mavros/**/guided_target:
125 | ros__parameters:
126 | tf.listen: false # enable tf listener (disable topic subscribers)
127 | tf.frame_id: "map"
128 | tf.child_frame_id: "target_position"
129 | tf.rate_limit: 50.0
130 |
131 | # setpoint_velocity
132 | /mavros/**/setpoint_velocity:
133 | ros__parameters:
134 | mav_frame: LOCAL_NED
135 |
136 | # vfr_hud
137 | # None
138 |
139 | # waypoint
140 | /mavros/**/mission:
141 | ros__parameters:
142 | pull_after_gcs: true # update mission if gcs updates
143 | use_mission_item_int: true # use the MISSION_ITEM_INT message instead of MISSION_ITEM
144 | # for uploading waypoints to FCU
145 |
146 | # --- mavros extras plugins (same order) ---
147 |
148 | # adsb
149 | # None
150 |
151 | # debug_value
152 | # None
153 |
154 | # distance_sensor
155 | ## Currently available orientations:
156 | # Check http://wiki.ros.org/mavros/**/Enumerations
157 | ##
158 | /mavros/**/distance_sensor:
159 | ros__parameters:
160 | config: |
161 | rangefinder_pub:
162 | id: 0
163 | frame_id: "lidar"
164 | #orientation: PITCH_270 # sended by FCU
165 | field_of_view: 0.0 # XXX TODO
166 | send_tf: false
167 | sensor_position: {x: 0.0, y: 0.0, z: -0.1}
168 | rangefinder_sub:
169 | subscriber: true
170 | id: 1
171 | orientation: PITCH_270 # only that orientation are supported by APM 3.4+
172 |
173 | # image_pub
174 | /mavros/**/image:
175 | ros__parameters:
176 | frame_id: "px4flow"
177 |
178 | # fake_gps
179 | /mavros/**/fake_gps:
180 | ros__parameters:
181 | # select data source
182 | use_mocap: true # ~mocap/pose
183 | mocap_transform: false # ~mocap/tf instead of pose
184 | mocap_withcovariance: false # ~mocap/pose uses PoseWithCovarianceStamped Message
185 | use_vision: false # ~vision (pose)
186 | use_hil_gps: true
187 | gps_id: 4
188 | # origin (default: Zürich)
189 | geo_origin.lat: 47.3667 # latitude [degrees]
190 | geo_origin.lon: 8.5500 # longitude [degrees]
191 | geo_origin.alt: 408.0 # altitude (height over the WGS-84 ellipsoid) [meters]
192 | eph: 2.0
193 | epv: 2.0
194 | horiz_accuracy: 0.5
195 | vert_accuracy: 0.5
196 | speed_accuracy: 0.0
197 | satellites_visible: 6 # virtual number of visible satellites
198 | fix_type: 3 # type of GPS fix (default: 3D)
199 | tf.listen: false
200 | tf.send: false # send TF?
201 | tf.frame_id: "map" # TF frame_id
202 | tf.child_frame_id: "fix" # TF child_frame_id
203 | tf.rate_limit: 10.0 # TF rate
204 | gps_rate: 5.0 # GPS data publishing rate
205 |
206 | # landing_target
207 | /mavros/**/landing_target:
208 | ros__parameters:
209 | listen_lt: false
210 | mav_frame: "LOCAL_NED"
211 | land_target_type: "VISION_FIDUCIAL"
212 | image.width: 640 # [pixels]
213 | image.height: 480
214 | camera.fov_x: 2.0071286398 # default: 115 [degrees]
215 | camera.fov_y: 2.0071286398
216 | tf.send: true
217 | tf.listen: false
218 | tf.frame_id: "landing_target"
219 | tf.child_frame_id: "camera_center"
220 | tf.rate_limit: 10.0
221 | target_size: {x: 0.3, y: 0.3}
222 |
223 | # mocap_pose_estimate
224 | /mavros/**/mocap:
225 | ros__parameters:
226 | # select mocap source
227 | use_tf: false # ~mocap/tf
228 | use_pose: true # ~mocap/pose
229 |
230 | # mount_control
231 | /mavros/**/mount:
232 | ros__parameters:
233 | debounce_s: 4.0
234 | err_threshold_deg: 10.0
235 | negate_measured_roll: false
236 | negate_measured_pitch: false
237 | negate_measured_yaw: false
238 |
239 | # odom
240 | /mavros/**/odometry:
241 | ros__parameters:
242 | fcu.odom_parent_id_des: "map" # desired parent frame rotation of the FCU's odometry
243 | fcu.odom_child_id_des: "map" # desired child frame rotation of the FCU's odometry
244 |
245 | # px4flow
246 | /mavros/**/px4flow:
247 | ros__parameters:
248 | frame_id: "px4flow"
249 | ranger_fov: 0.118682 # 6.8 degrees at 5 meters, 31 degrees at 1 meter
250 | ranger_min_range: 0.3 # meters
251 | ranger_max_range: 5.0 # meters
252 |
253 | # vision_pose_estimate
254 | /mavros/**/vision_pose:
255 | ros__parameters:
256 | tf.listen: false # enable tf listener (disable topic subscribers)
257 | tf.frame_id: "map"
258 | tf.child_frame_id: "vision_estimate"
259 | tf.rate_limit: 10.0
260 |
261 | # vision_speed_estimate
262 | /mavros/**/vision_speed:
263 | ros__parameters:
264 | listen_twist: true # enable listen to twist topic, else listen to vec3d topic
265 | twist_cov: true # enable listen to twist with covariance topic
266 |
267 | # vibration
268 | /mavros/**/vibration:
269 | ros__parameters:
270 | frame_id: "base_link"
271 |
272 | # wheel_odometry
273 | /mavros/**/wheel_odometry:
274 | ros__parameters:
275 | count: 2 # number of wheels to compute odometry
276 | use_rpm: false # use wheel's RPM instead of cumulative distance to compute odometry
277 | wheel0: {x: 0.0, y: -0.15, radius: 0.05} # x-, y-offset (m,NED) and radius (m)
278 | wheel1: {x: 0.0, y: 0.15, radius: 0.05} # x-, y-offset (m,NED) and radius (m)
279 | send_raw: true # send wheel's RPM and cumulative distance (~/wheel_odometry/rpm, ~/wheel_odometry/distance)
280 | send_twist: false # send geometry_msgs/TwistWithCovarianceStamped instead of nav_msgs/Odometry
281 | frame_id: "map" # origin frame
282 | child_frame_id: "base_link" # body-fixed frame
283 | vel_error: 0.1 # wheel velocity measurement error 1-std (m/s)
284 | tf.send: true
285 | tf.frame_id: "map"
286 | tf.child_frame_id: "base_link"
287 |
288 | # vim:set ts=2 sw=2 et:
289 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/.vscode/tasks.json:
--------------------------------------------------------------------------------
1 | {
2 | // See https://go.microsoft.com/fwlink/?LinkId=733558
3 | // for the documentation about the tasks.json format
4 | "version": "2.0.0",
5 | "tasks": [
6 | // Build tasks
7 | {
8 | "label": "build",
9 | "detail": "Build workspace (default)",
10 | "type": "shell",
11 | "command": "colcon build --allow-overriding cpp_pubsub --cmake-args '-DCMAKE_BUILD_TYPE=RelWithDebInfo' '-DCMAKE_EXPORT_COMPILE_COMMANDS=On' -Wall -Wextra -Wpedantic", // --merge-install --symlink-install --cmake-args '-DCMAKE_BUILD_TYPE=RelWithDebInfo' '-DCMAKE_EXPORT_COMPILE_COMMANDS=On' -Wall -Wextra -Wpedantic",
12 | // "command": "bash ./build.sh",
13 | "options": {"cwd":"${workspaceFolder}/ros2_ws/"},
14 | "group": {
15 | "kind": "build",
16 | "isDefault": true
17 | },
18 | "problemMatcher": "$gcc"
19 | },
20 | {
21 | "label": "debug",
22 | "detail": "Build workspace (debug)",
23 | "type": "shell",
24 | "command": "colcon build --merge-install --symlink-install --cmake-args '-DCMAKE_BUILD_TYPE=Debug' -Wall -Wextra -Wpedantic",
25 | // "command": "bash ./build.sh",
26 | "options": {"cwd":"${workspaceFolder}/ros2_ws/"},
27 | "group": "build",
28 | "problemMatcher": "$gcc"
29 | },
30 | // Test tasks
31 | {
32 | "label": "test",
33 | "detail": "Run all unit tests and show results.",
34 | "type": "shell",
35 | "command": "colcon test --merge-install --symlink-install; colcon test-result",
36 | "group": {
37 | "kind": "test",
38 | "isDefault": true
39 | }
40 | },
41 | // Clean
42 | {
43 | "label": "clean",
44 | "detail": "Run the clean target",
45 | "type": "shell",
46 | "command": "colcon build --cmake-target clean",
47 | "problemMatcher": "$gcc"
48 | },
49 | {
50 | "label": "purge",
51 | "detail": "Purge workspace by deleting all generated files.",
52 | "type": "shell",
53 | "command": "rm -fr build install log; py3clean .",
54 | "problemMatcher": []
55 | },
56 | // Linting and static code analysis tasks
57 | {
58 | "label": "fix",
59 | "detail": "Reformat files with uncrustify.",
60 | "type": "shell",
61 | "command": "ament_uncrustify --reformat src/",
62 | "problemMatcher": []
63 | },
64 | {
65 | "label": "uncrustify",
66 | "detail": "Lint files with uncrustify.",
67 | "type": "shell",
68 | "command": "ament_uncrustify src/",
69 | "presentation": {
70 | "panel": "dedicated",
71 | "reveal": "silent",
72 | "clear": true
73 | },
74 | "problemMatcher": [
75 | {
76 | "owner": "uncrustify",
77 | "source": " uncrustify",
78 | "fileLocation": "relative",
79 | "pattern": [
80 | /// just the file name message
81 | {
82 | "regexp": "^(.*)'(.*)':",
83 | "kind": "file",
84 | "file": 2,
85 | "message": 1
86 | },
87 | ]
88 | }
89 | ]
90 | },
91 | {
92 | "label": "cpplint",
93 | "detail": "Lint files with cpplint.",
94 | "type": "shell",
95 | "command": "ament_cpplint src/",
96 | "presentation": {
97 | "panel": "dedicated",
98 | "reveal": "silent",
99 | "clear": true
100 | },
101 | "problemMatcher": [
102 | {
103 | "owner": "cpplint",
104 | "source": " cpplint",
105 | "fileLocation": "absolute",
106 | "pattern": [
107 | {
108 | "regexp": "^(.+):(\\d+):\\s+(.+)\\[(.+)\\]$",
109 | "file": 1,
110 | "line": 2,
111 | "message": 3,
112 | "code": 4
113 | }
114 | ]
115 | }
116 | ]
117 | },
118 | {
119 | "label": "cppcheck",
120 | "detail": "Run static code checker cppcheck.",
121 | "type": "shell",
122 | "command": "ament_cppcheck src/",
123 | "presentation": {
124 | "panel": "dedicated",
125 | "reveal": "silent",
126 | "clear": true
127 | },
128 | "problemMatcher": [
129 | {
130 | "owner": "cppcheck",
131 | "source": "cppcheck",
132 | "pattern": [
133 | {
134 | "regexp": "^\\[(.+):(\\d+)\\]:\\s+(.+)$",
135 | "file": 1,
136 | "line": 2,
137 | "message": 3
138 | }
139 | ]
140 | }
141 | ]
142 | },
143 | {
144 | "label": "lint_cmake",
145 | "detail": "Run lint on cmake files.",
146 | "type": "shell",
147 | "command": "ament_lint_cmake src/",
148 | "presentation": {
149 | "panel": "dedicated",
150 | "reveal": "silent",
151 | "clear": true
152 | },
153 | "problemMatcher": [
154 | {
155 | "owner": "lint_cmake",
156 | "source": "lint_cmake",
157 | "pattern": [
158 | {
159 | "regexp": "^(.+):(\\d+):\\s+(.+)$",
160 | "file": 1,
161 | "line": 2,
162 | "message": 3
163 | }
164 | ]
165 | }
166 | ]
167 | },
168 | {
169 | "label": "flake8",
170 | "detail": "Run flake8 on python files.",
171 | "type": "shell",
172 | "command": "ament_flake8 src/",
173 | "presentation": {
174 | "panel": "dedicated",
175 | "reveal": "silent",
176 | "clear": true
177 | },
178 | "problemMatcher": [
179 | {
180 | "owner": "flake8",
181 | "source": "flake8",
182 | "pattern": [
183 | {
184 | "code": 4,
185 | "column": 3,
186 | "file": 1,
187 | "line": 2,
188 | "message": 5,
189 | "regexp": "^(.+):(\\d+):(\\d+): (\\w\\d+) (.+)$"
190 | }
191 | ]
192 | }
193 | ]
194 | },
195 | {
196 | "label": "pep257",
197 | "detail": "Run pep257 on python files.",
198 | "type": "shell",
199 | "command": "ament_pep257 src/",
200 | "presentation": {
201 | "panel": "dedicated",
202 | "reveal": "silent",
203 | "clear": true
204 | },
205 | "problemMatcher": [
206 | {
207 | "owner": "pep257",
208 | "source": "pep257",
209 | "pattern": [
210 | {
211 | "regexp": "^(.+):(\\d+)\\s+(.+):\\s+(.+):\\s+(.+)$",
212 | "file": 1,
213 | "line": 2,
214 | "code": 4,
215 | "message": 5
216 | }
217 | ]
218 | }
219 | ]
220 | },
221 | {
222 | "label": "xmllint",
223 | "detail": "Run xmllint on xml files.",
224 | "type": "shell",
225 | "command": "ament_xmllint src/",
226 | "presentation": {
227 | "panel": "dedicated",
228 | "reveal": "silent",
229 | "clear": true
230 | },
231 | "problemMatcher": [
232 | {
233 | "owner": "xmllint",
234 | "source": "xmllint",
235 | "fileLocation": "absolute",
236 | "pattern": [
237 | {
238 | "regexp": "^(.+):(\\d+):\\s+(.+)\\s+:\\s+(.+)$",
239 | "file": 1,
240 | "line": 2,
241 | "code": 3,
242 | "message": 4
243 | }
244 | ]
245 | }
246 | ]
247 | },
248 | {
249 | "label": "lint all",
250 | "detail": "Run all linters.",
251 | "dependsOn":["cppcheck", "cpplint", "flake8", "lint_cmake", "pep257","xmllint", "uncrustify"],
252 | "problemMatcher": []
253 | },
254 | // Workspace editing tasks
255 | {
256 | "label": "new ament_cmake package",
257 | "detail": "Create a new ROS cpp package from a template.",
258 | "type": "shell",
259 | "command": "ros2 pkg create --destination-directory src --build-type ament_cmake ${input:package}",
260 | "problemMatcher": []
261 | },
262 | {
263 | "label": "new ament_python package",
264 | "detail": "Create a new ROS python package from a template.",
265 | "type": "shell",
266 | "command": "ros2 pkg create --destination-directory src --build-type ament_python ${input:package}",
267 | "problemMatcher": []
268 | },
269 | {
270 | "label": "import from workspace file",
271 | "detail": "Use vcs to import modules specified by a workspace/rosinstall file.",
272 | "type": "shell",
273 | "command": "vcs import < src/ros2.repos src",
274 | "problemMatcher": []
275 | },
276 | {
277 | "label": "update workspace file",
278 | "detail": "Use vcs to update repositories in src to workspace file.",
279 | "type": "shell",
280 | "command": "vcs export src > src/ros2.repos",
281 | "problemMatcher": []
282 | },
283 | {
284 | "label": "install dependencies",
285 | "detail": "Install all dependencies specified in the workspaces package.xml files.",
286 | "type": "shell",
287 | "command": "sudo apt-get update && rosdep update && rosdep install --from-paths src --ignore-src -y",
288 | "problemMatcher": []
289 | }
290 | ],
291 | "inputs": [
292 | {
293 | "id": "package",
294 | "type": "promptString",
295 | "description": "Package name"
296 | }
297 | ]
298 | }
299 |
--------------------------------------------------------------------------------
/dockerfiles/ros1-2-ignition/LICENSE:
--------------------------------------------------------------------------------
1 | Apache License
2 | Version 2.0, January 2004
3 | http://www.apache.org/licenses/
4 |
5 | TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
6 |
7 | 1. Definitions.
8 |
9 | "License" shall mean the terms and conditions for use, reproduction,
10 | and distribution as defined by Sections 1 through 9 of this document.
11 |
12 | "Licensor" shall mean the copyright owner or entity authorized by
13 | the copyright owner that is granting the License.
14 |
15 | "Legal Entity" shall mean the union of the acting entity and all
16 | other entities that control, are controlled by, or are under common
17 | control with that entity. For the purposes of this definition,
18 | "control" means (i) the power, direct or indirect, to cause the
19 | direction or management of such entity, whether by contract or
20 | otherwise, or (ii) ownership of fifty percent (50%) or more of the
21 | outstanding shares, or (iii) beneficial ownership of such entity.
22 |
23 | "You" (or "Your") shall mean an individual or Legal Entity
24 | exercising permissions granted by this License.
25 |
26 | "Source" form shall mean the preferred form for making modifications,
27 | including but not limited to software source code, documentation
28 | source, and configuration files.
29 |
30 | "Object" form shall mean any form resulting from mechanical
31 | transformation or translation of a Source form, including but
32 | not limited to compiled object code, generated documentation,
33 | and conversions to other media types.
34 |
35 | "Work" shall mean the work of authorship, whether in Source or
36 | Object form, made available under the License, as indicated by a
37 | copyright notice that is included in or attached to the work
38 | (an example is provided in the Appendix below).
39 |
40 | "Derivative Works" shall mean any work, whether in Source or Object
41 | form, that is based on (or derived from) the Work and for which the
42 | editorial revisions, annotations, elaborations, or other modifications
43 | represent, as a whole, an original work of authorship. For the purposes
44 | of this License, Derivative Works shall not include works that remain
45 | separable from, or merely link (or bind by name) to the interfaces of,
46 | the Work and Derivative Works thereof.
47 |
48 | "Contribution" shall mean any work of authorship, including
49 | the original version of the Work and any modifications or additions
50 | to that Work or Derivative Works thereof, that is intentionally
51 | submitted to Licensor for inclusion in the Work by the copyright owner
52 | or by an individual or Legal Entity authorized to submit on behalf of
53 | the copyright owner. For the purposes of this definition, "submitted"
54 | means any form of electronic, verbal, or written communication sent
55 | to the Licensor or its representatives, including but not limited to
56 | communication on electronic mailing lists, source code control systems,
57 | and issue tracking systems that are managed by, or on behalf of, the
58 | Licensor for the purpose of discussing and improving the Work, but
59 | excluding communication that is conspicuously marked or otherwise
60 | designated in writing by the copyright owner as "Not a Contribution."
61 |
62 | "Contributor" shall mean Licensor and any individual or Legal Entity
63 | on behalf of whom a Contribution has been received by Licensor and
64 | subsequently incorporated within the Work.
65 |
66 | 2. Grant of Copyright License. Subject to the terms and conditions of
67 | this License, each Contributor hereby grants to You a perpetual,
68 | worldwide, non-exclusive, no-charge, royalty-free, irrevocable
69 | copyright license to reproduce, prepare Derivative Works of,
70 | publicly display, publicly perform, sublicense, and distribute the
71 | Work and such Derivative Works in Source or Object form.
72 |
73 | 3. Grant of Patent License. Subject to the terms and conditions of
74 | this License, each Contributor hereby grants to You a perpetual,
75 | worldwide, non-exclusive, no-charge, royalty-free, irrevocable
76 | (except as stated in this section) patent license to make, have made,
77 | use, offer to sell, sell, import, and otherwise transfer the Work,
78 | where such license applies only to those patent claims licensable
79 | by such Contributor that are necessarily infringed by their
80 | Contribution(s) alone or by combination of their Contribution(s)
81 | with the Work to which such Contribution(s) was submitted. If You
82 | institute patent litigation against any entity (including a
83 | cross-claim or counterclaim in a lawsuit) alleging that the Work
84 | or a Contribution incorporated within the Work constitutes direct
85 | or contributory patent infringement, then any patent licenses
86 | granted to You under this License for that Work shall terminate
87 | as of the date such litigation is filed.
88 |
89 | 4. Redistribution. You may reproduce and distribute copies of the
90 | Work or Derivative Works thereof in any medium, with or without
91 | modifications, and in Source or Object form, provided that You
92 | meet the following conditions:
93 |
94 | (a) You must give any other recipients of the Work or
95 | Derivative Works a copy of this License; and
96 |
97 | (b) You must cause any modified files to carry prominent notices
98 | stating that You changed the files; and
99 |
100 | (c) You must retain, in the Source form of any Derivative Works
101 | that You distribute, all copyright, patent, trademark, and
102 | attribution notices from the Source form of the Work,
103 | excluding those notices that do not pertain to any part of
104 | the Derivative Works; and
105 |
106 | (d) If the Work includes a "NOTICE" text file as part of its
107 | distribution, then any Derivative Works that You distribute must
108 | include a readable copy of the attribution notices contained
109 | within such NOTICE file, excluding those notices that do not
110 | pertain to any part of the Derivative Works, in at least one
111 | of the following places: within a NOTICE text file distributed
112 | as part of the Derivative Works; within the Source form or
113 | documentation, if provided along with the Derivative Works; or,
114 | within a display generated by the Derivative Works, if and
115 | wherever such third-party notices normally appear. The contents
116 | of the NOTICE file are for informational purposes only and
117 | do not modify the License. You may add Your own attribution
118 | notices within Derivative Works that You distribute, alongside
119 | or as an addendum to the NOTICE text from the Work, provided
120 | that such additional attribution notices cannot be construed
121 | as modifying the License.
122 |
123 | You may add Your own copyright statement to Your modifications and
124 | may provide additional or different license terms and conditions
125 | for use, reproduction, or distribution of Your modifications, or
126 | for any such Derivative Works as a whole, provided Your use,
127 | reproduction, and distribution of the Work otherwise complies with
128 | the conditions stated in this License.
129 |
130 | 5. Submission of Contributions. Unless You explicitly state otherwise,
131 | any Contribution intentionally submitted for inclusion in the Work
132 | by You to the Licensor shall be under the terms and conditions of
133 | this License, without any additional terms or conditions.
134 | Notwithstanding the above, nothing herein shall supersede or modify
135 | the terms of any separate license agreement you may have executed
136 | with Licensor regarding such Contributions.
137 |
138 | 6. Trademarks. This License does not grant permission to use the trade
139 | names, trademarks, service marks, or product names of the Licensor,
140 | except as required for reasonable and customary use in describing the
141 | origin of the Work and reproducing the content of the NOTICE file.
142 |
143 | 7. Disclaimer of Warranty. Unless required by applicable law or
144 | agreed to in writing, Licensor provides the Work (and each
145 | Contributor provides its Contributions) on an "AS IS" BASIS,
146 | WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
147 | implied, including, without limitation, any warranties or conditions
148 | of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
149 | PARTICULAR PURPOSE. You are solely responsible for determining the
150 | appropriateness of using or redistributing the Work and assume any
151 | risks associated with Your exercise of permissions under this License.
152 |
153 | 8. Limitation of Liability. In no event and under no legal theory,
154 | whether in tort (including negligence), contract, or otherwise,
155 | unless required by applicable law (such as deliberate and grossly
156 | negligent acts) or agreed to in writing, shall any Contributor be
157 | liable to You for damages, including any direct, indirect, special,
158 | incidental, or consequential damages of any character arising as a
159 | result of this License or out of the use or inability to use the
160 | Work (including but not limited to damages for loss of goodwill,
161 | work stoppage, computer failure or malfunction, or any and all
162 | other commercial damages or losses), even if such Contributor
163 | has been advised of the possibility of such damages.
164 |
165 | 9. Accepting Warranty or Additional Liability. While redistributing
166 | the Work or Derivative Works thereof, You may choose to offer,
167 | and charge a fee for, acceptance of support, warranty, indemnity,
168 | or other liability obligations and/or rights consistent with this
169 | License. However, in accepting such obligations, You may act only
170 | on Your own behalf and on Your sole responsibility, not on behalf
171 | of any other Contributor, and only if You agree to indemnify,
172 | defend, and hold each Contributor harmless for any liability
173 | incurred by, or claims asserted against, such Contributor by reason
174 | of your accepting any such warranty or additional liability.
175 |
176 | END OF TERMS AND CONDITIONS
177 |
178 | APPENDIX: How to apply the Apache License to your work.
179 |
180 | To apply the Apache License to your work, attach the following
181 | boilerplate notice, with the fields enclosed by brackets "[]"
182 | replaced with your own identifying information. (Don't include
183 | the brackets!) The text should be enclosed in the appropriate
184 | comment syntax for the file format. We also recommend that a
185 | file or class name and description of purpose be included on the
186 | same "printed page" as the copyright notice for easier
187 | identification within third-party archives.
188 |
189 | Copyright [yyyy] [name of copyright owner]
190 |
191 | Licensed under the Apache License, Version 2.0 (the "License");
192 | you may not use this file except in compliance with the License.
193 | You may obtain a copy of the License at
194 |
195 | http://www.apache.org/licenses/LICENSE-2.0
196 |
197 | Unless required by applicable law or agreed to in writing, software
198 | distributed under the License is distributed on an "AS IS" BASIS,
199 | WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
200 | See the License for the specific language governing permissions and
201 | limitations under the License.
202 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | [](https://github.com/remaro-network/tudelft_hackathon/actions/workflows/container.yaml)
2 |
3 | # REMARO Summer School Delft 2022 - Underwater robotics hackathon
4 |
5 | The overall goal of this hackathon is to provide hands-on training for the Early Stage Researchers (ESRs)
6 | of the REMARO network (but not limited to) on how to architect, program, simulate and implement basic
7 | underwater robot functionalities.
8 |
9 | More specifically, the goals for ESRs with background in:
10 | * **Mathematics/Computer Science:** Learn basic robotics workflow and commonly used tools
11 | * **Robotics:** learn cutting-edge tools, and details on how to develop robot-specific system
12 |
13 | Thus, this training will address how to setup an underwater robot, such as the [BlueROV2](https://bluerobotics.com/store/rov/bluerov2/),
14 | to run with ROS2, and how to simulate it with Gazebo (Ignition). The idea is that participants
15 | work with a simulation first and then test what is developed in a real BlueROV2, with this they
16 | can begin to understand the challenges and differences of deploying a robot in simulation and in the real world.
17 |
18 | The use case selected for this training is “wall avoidance”. Basically, the goal is for the robot
19 | to navigate an environment and not crash into walls using only sonar data. An initial code for a random
20 | avoidance mission is provided, and the idea is that participants work to develop better missions during this training and improve the system in general.
21 |
22 | More details on instructions for participants can be found in the [PARTICIPANTS_TODO](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/PARTICIPANTS_TODO.md)
23 |
24 | You can check the random wall avoidance behavior on the video:
25 |
26 | [](https://www.youtube.com/watch?v=Zv-int_BIJw)
27 |
28 | ## Acknowledgements
29 |
30 |
31 |  32 |
33 |
34 | This work is part of the Reliable AI for Marine Robotics (REMARO) Project. For more info, please visit: https://remaro.eu/
35 |
36 |
32 |
33 |
34 | This work is part of the Reliable AI for Marine Robotics (REMARO) Project. For more info, please visit: https://remaro.eu/
35 |
36 |
37 |
38 |
39 |  40 |
41 |
42 | This project has received funding from the European Union's Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie grant agreement No. 956200.
43 |
44 | ## Summary
45 | - [Computer setup](https://github.com/remaro-network/tudelft_hackathon#setup)
46 | - [Bluerov setup](https://github.com/remaro-network/tudelft_hackathon#bluerov-setup)
47 | * [Installation](https://github.com/remaro-network/tudelft_hackathon#installation)
48 | - [Install prerequisites to run with docker](https://github.com/remaro-network/tudelft_hackathon#install-prerequisites-to-run-with-docker)
49 | - [Install locally](https://github.com/remaro-network/tudelft_hackathon#install-locally)
50 | - [Run it with docker via CLI](https://github.com/remaro-network/tudelft_hackathon#run-it-with-docker-via-cli)
51 | - [Run with docker with VSCode ](https://github.com/remaro-network/tudelft_hackathon#run-it-with-docker-with-vscode)
52 | - [Run locally](https://github.com/remaro-network/tudelft_hackathon#run-it-locally)
53 | - [Explanation](https://github.com/remaro-network/tudelft_hackathon#explanation)
54 | - [Exercises](https://github.com/remaro-network/tudelft_hackathon#exercises)
55 | - [Additional information](https://github.com/remaro-network/tudelft_hackathon#additional-info)
56 |
57 | ## Setup
58 |
59 | Tested with:
60 | - Ubuntu 22.04
61 | - [ROS2 Humble](https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html)
62 | - [Gazebo (Ignition) Garden](https://gazebosim.org/docs/garden/install_ubuntu)
63 | - [ArduPilot (Sub-4.1)](https://github.com/ArduPilot/ardupilot/tree/f2af3c7ed2907be914c41d8512654a77498d3870)
64 | - [ardupilot_gazebo plugin](https://github.com/ArduPilot/ardupilot_gazebo/tree/ignition-garden)
65 | - [mavros2](https://github.com/mavlink/mavros)
66 | - [remaro_world](https://github.com/remaro-network/remaro_worlds/tree/ign-garden)
67 | - [bluerov2_ignition](https://github.com/Rezenders/bluerov2_ignition)
68 |
69 | ## Bluerov Setup
70 |
71 | - BlueOS (v1.0.1)
72 |
73 | ## Installation
74 |
75 | There are 3 options to use this repo.
76 | Install everything locally in your computer. This will require some effort, but when done should be easier to use.
77 | Run everything with docker (read disclaimer bellow):
78 | - Via the CLI. This option should be faster to reproduce everything, but is a little bit annoying for development.
79 | - Using VSCode. Requires installing VSCode. Should be easier way to use everything. (work in progress)
80 |
81 | **Disclaimer**
82 | Running docker images with graphical user interface is a little bit trick and might not work in all systems.
83 | We tested in a system with ubuntu 22.04 and with a NVIDIA gpu.
84 | It might not work on systems with AMD gpus, and on MAC.
85 | We are going to try to fix this problem until the hackathon, but it is not guaranteed.
86 | In those cases go for the [local installation](https://github.com/remaro-network/tudelft_hackathon#install-locally).
87 |
88 | ### Install prerequisites to run with docker
89 |
90 | - Install docker on your machine. You can find instructions [here](https://docs.docker.com/engine/install/ubuntu/)
91 | - Allow non-root users to manage docker. Instructions [here](https://docs.docker.com/engine/install/linux-postinstall/#manage-docker-as-a-non-root-user)
92 | - Install VSCode. Instructions [here](https://code.visualstudio.com/download)
93 | - Install [nvidia-docker](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#docker)(only needed if you have a nvidia GPU)
94 |
95 | ### Configure computer to connect with the BlueROV2
96 | Follow [Bluerobotics instructions](https://bluerobotics.com/learn/bluerov2-software-setup/#software-introduction)
97 |
98 | ### Install locally
99 | #### Install Gazebo Garden
100 |
101 | Follow the [official instructions](https://gazebosim.org/docs/garden/install_ubuntu) for installing Gazebo Garden.
102 |
103 | #### Install ROS2 Humble
104 |
105 | Follow the [official instructions](https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html) for installing ROS2 Humble.
106 |
107 | #### Install ardusub
108 |
109 | Instructions can be found [here](https://ardupilot.org/dev/docs/building-setup-linux.html#building-setup-linux)
110 |
111 | **Disclaimer:**
112 | Problems may occur with different combinations of ArduPilot and MavROS versions.
113 |
114 | ```Bash
115 | cd ~/
116 | git clone https://github.com/ArduPilot/ardupilot.git
117 | cd ardupilot
118 | git checkout e9f46b9
119 | git submodule update --init --recursive
120 | ```
121 |
122 | Note that the script used to install prerequisites available for this
123 | version of ArduSub does not work in Ubuntu 22.04. Therefore, you need to replace them before
124 | running ArduSub. To install the ArduPilot prerequisites, do the following.
125 |
126 | ```Bash
127 | cd ~/ardupilot
128 | cd Tools/environment_install/
129 | rm install-prereqs-ubuntu.sh
130 | wget https://raw.githubusercontent.com/ArduPilot/ardupilot/master/Tools/environment_install/install-prereqs-ubuntu.sh
131 | cd ~/ardupilot
132 | chmod +x Tools/environment_install/install-prereqs-ubuntu.sh
133 | Tools/environment_install/install-prereqs-ubuntu.sh -y
134 | . ~/.profile
135 | ```
136 |
137 | If you want to use MAC, follow [this instruction](https://ardupilot.org/dev/docs/building-setup-mac.html)
138 |
139 | To test if the installation worked, run:
140 |
141 | ```Bash
142 | sim_vehicle.py -v ArduSub -L RATBeach --console --map
143 | ```
144 |
145 | Ardupilot SITL should open and a console plus a map should appear.
146 |
147 | **Troubleshoot**
148 | If you have problems with the install-prereqs-ubuntu.sh script try to install the dependencies manually with the following commands.
149 |
150 | ```Bash
151 | pip3 install --user -U future lxml pymavlink MAVProxy pexpect flake8 geocoder empy dronecan pygame intelhex
152 | ```
153 |
154 | ```Bash
155 | sudo apt-get --assume-yes install build-essential ccache g++ gawk git make wget python-is-python3 libtool libxml2-dev libxslt1-dev python3-dev python3-pip python3-setuptools python3-numpy python3-pyparsing python3-psutil xterm python3-matplotlib python3-serial python3-scipy python3-opencv libcsfml-dev libcsfml-audio2.5 libcsfml-dev libcsfml-graphics2.5 libcsfml-network2.5 libcsfml-system2.5 libcsfml-window2.5 libsfml-audio2.5 libsfml-dev libsfml-graphics2.5 libsfml-network2.5 libsfml-system2.5 libsfml-window2.5 python3-yaml libpython3-stdlib python3-wxgtk4.0 fonts-freefont-ttf libfreetype6-dev libpng16-16 libportmidi-dev libsdl-image1.2-dev libsdl-mixer1.2-dev libsdl-ttf2.0-dev libsdl1.2-dev libtool-bin g++-arm-linux-gnueabihf lcov gcovr
156 | ```
157 |
158 | #### Install ardusub_plugin
159 |
160 | Install dependencies:
161 |
162 | ```Bash
163 | sudo apt install rapidjson-dev libgz-sim7-dev
164 | ```
165 |
166 | Clone and build repo:
167 |
168 | ```Bash
169 | cd ~/
170 | git clone https://github.com/ArduPilot/ardupilot_gazebo
171 | cd ardupilot_gazebo
172 | mkdir build && cd build
173 | cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo
174 | make -j4
175 | ```
176 |
177 | Add required paths:
178 |
179 | Assuming that you have clone the repository in `$HOME/ardupilot_gazebo`:
180 | ```bash
181 | echo 'export GZ_SIM_SYSTEM_PLUGIN_PATH=$HOME/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc
182 | echo 'export GZ_SIM_RESOURCE_PATH=$HOME/ardupilot_gazebo/models:$HOME/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
183 | ```
184 |
185 | Reload your terminal with source ~/.bashrc
186 |
187 | More info about the plugin can be found in the [repo](https://github.com/ArduPilot/ardupilot_gazebo/tree/ignition-garden)
188 |
189 | #### Install hackathon workspace
190 |
191 | Create new workspace:
192 | ```Bash
193 | mkdir -p ~/tudelft_hackathon_ws/src
194 | cd ~/tudelft_hackathon_ws
195 | ```
196 |
197 | Clone repos:
198 | ```Bash
199 | wget https://raw.githubusercontent.com/remaro-network/tudelft_hackathon/ros2/hackathon.rosinstall
200 | vcs import src < hackathon.rosinstall --recursive
201 | ```
202 |
203 | Add required paths:
204 | ```Bash
205 | echo 'export GZ_SIM_RESOURCE_PATH=$HOME/tudelft_hackathon_ws/src/bluerov2_ignition/models:$HOME/tudelft_hackathon_ws/src/bluerov2_ignition/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
206 |
207 | echo 'export GZ_SIM_RESOURCE_PATH=$HOME/tudelft_hackathon_ws/src/remaro_worlds/models:$HOME/tudelft_hackathon_ws/src/remaro_worlds/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
208 | ```
209 |
210 | Before building the `ros_gz` package (one of the dependencies), you need to export the gazebo version:
211 |
212 | ```
213 | export GZ_VERSION="garden"
214 | ```
215 | You can also add this to your `~/.bashrc` to make this process easier.
216 |
217 | Install deps:
218 | ```Bash
219 | source /opt/ros/humble/setup.bash
220 | cd ~/tudelft_hackathon_ws/
221 | rosdep install --from-paths src --ignore-src -r -y
222 | ```
223 |
224 | Build project:
225 | ```Bash
226 | cd ~/tudelft_hackathon_ws/
227 | colcon build --symlink-install
228 | ```
229 |
230 | ## Run it with docker via CLI
231 |
232 | Create docker network:
233 |
234 | ```Bash
235 | sudo docker network create ros_net
236 | ```
237 |
238 | ### Run Ignition simulation + ardupilot SITL:
239 |
240 | If you a NVIDIA GPU:
241 | ```Bash
242 | xhost +local:root
243 | sudo docker run -it --rm --name ignition --net ros_net -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ghcr.io/remaro-network/tudelft_hackathon:nvidia ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py ardusub:=true mavros_url:='bluerov:14551'
244 | ```
245 |
246 | If you have an AMD GPU:
247 | ```Bash
248 | xhost +local:root ;
249 | sudo docker run -it --rm --name ignition --net ros_net -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --device=/dev/dri --group-add video ghcr.io/remaro-network/tudelft_hackathon:non-nvidia ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py ardusub:=true mavros_url:='bluerov:14551'
250 | ```
251 |
252 | If you have an Intel GPU:
253 | ```Bash
254 | xhost +local:root ;
255 | sudo docker run -it --rm --name ignition --net ros_net -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --device=/dev/dri:/dev/dri ghcr.io/remaro-network/tudelft_hackathon:non-nvidia ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py ardusub:=true mavros_url:='bluerov:14551'
256 | ```
257 |
258 | ### Run bluerov software:
259 |
260 | ```Bash
261 | sudo docker run -it --rm --name bluerov --net ros_net ghcr.io/remaro-network/tudelft_hackathon_base:latest ros2 launch tudelft_hackathon bluerov_bringup_no_ign.launch.py fcu_url:=udp://:14551@ignition:14555
262 | ```
263 |
264 | ### Development with docker via cli
265 |
266 | To add your modifications into the docker images you need to rebuild the relevant docker images.
267 | In this case, run the `build-dev-images.sh` script to rebuild them. And make sure to substitute in the `docker run` commands the images from rezenders to you local images. I.e: `rezenders/ignition:hackathon` -> `ignition:hackathon-dev` and `rezenders/ros-foxy-hackathon` -> `ros-foxy-hackathon:dev`
268 |
269 | ## Run it with docker with VSCode
270 |
271 | Check instructions [here](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/dockerfiles/ros1-2-ignition/README.md)
272 |
273 | ## Run it locally
274 |
275 | ### Simulation
276 | Before running anything you need to source the workspace. With this command:
277 |
278 | ```Bash
279 | source ~/tudelft_hackathon_ws/install/setup.bash
280 | ```
281 |
282 | Or you can add that to the ~/.bashrc file to prevent needing to source everytime.
283 |
284 | ```Bash
285 | echo "source ~/tudelft_hackathon_ws/install/setup.bash" >> ~/.bashrc
286 | ```
287 | Don't forget to re-open your terminal after altering the `~/.bashrc` file.
288 |
289 | In one terminal run ardusub SITL:
290 | ```Bash
291 | sim_vehicle.py -L RATBeach -v ArduSub --model=JSON --console
292 | ```
293 |
294 | In another terminal run the simulation + mavros + agent:
295 | ```Bash
296 | ros2 launch tudelft_hackathon bluerov_bringup.launch.py simulation:=true ardusub:=false
297 | ```
298 |
299 | ### Bluerov2
300 |
301 | ```Bash
302 | ros2 launch tudelft_hackathon bluerov_bringup.launch.py simulation:=false
303 | ```
304 |
305 | ## Explanation
306 |
307 | Simplified system architecture:
308 |
309 | 
310 |
311 | The system was designed to be used both with a real or simulated BlueROV2. When
312 | used with a simulation, the left nodes are deployed. And when used with the real
313 | robot the right nodes are deployed.The agent and MAVROS nodes are always deployed.
314 |
315 | First, let's take a look on how the real BlueROV2 works, then we see how the simulation
316 | is setup to mimic it.
317 |
318 | ### Real BlueROV2
319 |
320 | **BlueROV2:** The BlueROV2 that is going to be used for the hackathon has the [heavy configuration](https://bluerobotics.com/store/rov/bluerov2-upgrade-kits/brov2-heavy-retrofit/). It is equipped with the [Ping 360](https://bluerobotics.com/store/sensors-sonars-cameras/sonar/ping360-sonar-r1-rp/) mechanical scanning sonar mounted in the [standard location](https://bluerobotics.com/learn/ping360-installation-guide-for-the-bluerov2/#mounting-the-ping360-to-the-embluerov2em-frame-heavy). And ArduSub runs on a [Pixhawk](https://bluerobotics.com/store/comm-control-power/control/pixhawk-r1-rp/).
321 |
322 | **Ping360 sonar driver:** To get data from the sonar the [ping360_sonar](https://github.com/CentraleNantesRobotics/ping360_sonar) ROS2 package is being used. It provides data in the following topics:
323 |
324 | | Topic | Message type | Description |
325 | | ------------- | ------------- | ------------- |
326 | | /scan_image | [sensor_msgs/Image](https://github.com/ros2/common_interfaces/blob/master/sensor_msgs/msg/Image.msg) | The generated sonar image in gray level|
327 | | /echo | [ping360_sonar_msg/SonarEcho](https://github.com/CentraleNantesRobotics/ping360_sonar/blob/ros2/ping360_sonar_msgs/msg/SonarEcho.msg) | Raw sonar data|
328 | | /scan | [sensor_msgs/LaserScan](https://github.com/ros2/common_interfaces/blob/master/sensor_msgs/msg/LaserScan.msg) | Publishes a LaserScan msg with ranges detected above a certain intensity threshold (0-255). The intensities of the message are scaled down to (0,1)|
329 |
330 | Using this package, the Ping360 sonar takes between 6 and 10 seconds to complete a 360 degree rotation.
331 |
332 | **ArduSub:** According to their [website](https://www.ardusub.com/) ArduSub is "is a fully-featured open-source solution for remotely operated underwater vehicles (ROVs) and autonomous underwater vehicles (AUVs). ArduSub is a part of the [ArduPilot](https://ardupilot.org/) project, and was originally derived from the ArduCopter code. ArduSub has extensive capabilities out of the box including feedback stability control, depth and heading hold, and autonomous navigation".
333 |
334 | With the current configuration, BlueROV2 is not able to calculate its 3D position as there are no sensors that provide enough information for this, such as DVL, underwater GPS, etc.
335 | Thus, it is only possible to operate the robot using [flight modes](https://ardupilot.org/copter/docs/flight-modes.html#gps-dependency) that don't require positioning data, such as MANUAL, STABILIZE, and DEPTH HOLD. See [ArduSub flight modes](https://www.ardusub.com/reference/ardusub/features-while-in-operation.html#flight-modes).
336 | Consequently, it is not possible to send waypoints or velocity commands to the robot, the only way to operate it is by overriding the [RC inputs](https://www.ardusub.com/developers/rc-input-and-output.html#rc-inputs).
337 |
338 | **MAVROS:** The [MAVROS](https://github.com/mavlink/mavros) package is used to bridge the communication between ROS and mavlink, which is the communication protocol used by ArduSub. Which means MAVROS can be used as a bridge between ROS and ArduSub. To connect it to ArduSub it necesary to set the following parameters:
339 | - `fcu_url`: Address of the flight controller unit. For this case: `udp://192.168.2.1:14550@192.168.2.2:14555`
340 |
341 | MAVROS provides an extensive number of topics and services to interact with autopilots, you can check the full list [here](http://wiki.ros.org/mavros). For our use case, the topics and services being used are:
342 |
343 | | Topic | Message type | Description |
344 | | ------------- | ------------- | ------------- |
345 | | mavros/state | [mavros_msgs/State](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/msg/State.msg) |Provides the FCU state |
346 | | mavros/rc/override | [mavros_msgs/OverrideRCIn](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/msg/OverrideRCIn.msg) | Send RC override message to FCU |
347 |
348 | | Service | Message type | Description |
349 | | ------------- | ------------- | ------------- |
350 | | mavros/set_mode |[mavros_msgs/SetMode](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/srv/SetMode.srv)| Set FCU flight mode |
351 | | mavros/cmd/arming |[mavros_msgs/CommandBool](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/srv/CommandBool.srv)| Change arming status|
352 |
353 |
354 | To simplify interactions with MAVROS, a [wrapper](https://github.com/remaro-network/mavros_wrapper) was setup with the basic functionalities needed for this hackathon. It works like this:
355 |
356 | ```Python
357 | from mavros_wrapper.ardusub_wrapper import * # Import wrapper
358 |
359 | ardusub = BlueROVArduSubWrapper("ardusub_node") # create new instance with desired node name
360 | status = ardusub.status # to get FCU status
361 | ardusub.set_mode("MANUAL") # set FCU flight mode to MANUAL
362 | ardusub.arm_motors(True) # arm motors
363 | ardusub.toogle_rc_override(True) # start overriding RC
364 | ardusub.set_rc_override_channels(forward=0.5) # set values to override
365 | ```
366 |
367 | **Agent:** The agent node is the one that decides how the robot should behave.
368 | For this hackathon, we setup two different nodes with simple behaviors:
369 |
370 | The [bluerov_agent](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/scripts/bluerov_agent.py) has the following behavior. The robot set its flight mode to `MANUAL`, then arms the thrusters, then go around in a square path once. For this, the agent uses the topics & services listed in the mavros section.
371 |
372 | Let's break the code and understand what's going on below the surface.
373 |
374 | The main function:
375 | ```Python
376 | if __name__ == '__main__':
377 | rclpy.init(args=sys.argv)
378 |
379 | ardusub = BlueROVArduSubWrapper("ardusub_node")
380 |
381 | thread = threading.Thread(target=rclpy.spin, args=(ardusub, ), daemon=True)
382 | thread.start()
383 |
384 | mission(ardusub)
385 | ```
386 | First the `rclpy` library is initialized. Then the ardusub node is created using the `BlueROVArduSubWrapper` class defined in the `mavros_wrapper` package. Following, a new thread is created to spin the ardusub node in parallel, this is necessary because we are going to use some sleep functions in the main thread later and we want the ardusub node to keep spinning despite of that. Lastly, the `mission` function is called, which is where the mission of the robot is defined.
387 |
388 | Now let's take a look in the `mission` function
389 | ```Python
390 | def mission(ardusub):
391 |
392 | service_timer = ardusub.create_rate(2)
393 | while ardusub.status.mode != "MANUAL":
394 | ardusub.set_mode("MANUAL")
395 | service_timer.sleep()
396 |
397 | print("Manual mode selected")
398 |
399 | while ardusub.status.armed == False:
400 | ardusub.arm_motors(True)
401 | service_timer.sleep()
402 |
403 | print("Thrusters armed")
404 |
405 | print("Initializing mission")
406 |
407 | timer = ardusub.create_rate(0.5) # Hz
408 |
409 | ardusub.toogle_rc_override(True)
410 | ardusub.set_rc_override_channels(forward=0.5)
411 | timer.sleep()
412 | ardusub.set_rc_override_channels(lateral=0.5)
413 | timer.sleep()
414 | ardusub.set_rc_override_channels(forward=-0.5)
415 | timer.sleep()
416 | ardusub.set_rc_override_channels(lateral=-0.5)
417 | timer.sleep()
418 | ardusub.set_rc_override_channels(lateral=0)
419 | ardusub.toogle_rc_override(False)
420 |
421 | print("Mission completed")
422 | ```
423 | A `service_timer` timer is created with 2Hz rate. Then we have a while loop that keeps trying to change the flight mode to `MANUAL` until the flight mode is set to `MANUAL`, note that the `ardusub.set_mode("MANUAL")` method from the mavros_wrapper explained earlier is used for this, and that the `service_timer` is used to make the loop wait for 0.5 seconds before repeating. Following, we have a similar loop to arm the motors.
424 |
425 | After that, we create a new timer with 0.5Hz rate. The `ardusub.toogle_rc_override(True)` method is called to make the ardusub node start publishing messages in the `/mavros/rc/override` topic. Then, we use the method `ardusub.set_rc_override_channels(forward=0.5)` to make the robot move forward with half of its thrust, this is achieved internally by the ardusub node by publishing the appropriate message in the `/mavros/rc/override` topic. Following, the program sleeps for 2 seconds and then we make the robot move again to other directions, in order to go "around" a square. And that is it.
426 |
427 |
428 | The [random_wall_avoidance](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/scripts/random_wall_avoidance.py) has the following behavior. The robot set its flight mode to `ALT HOLD`, then arms the thrusters, then starts moving forward. The agent subscribes to the sonar topic and every time it receives sonar readings it checks if there is an obstacle in its front, e.g. 180°, closer than a certain threshold, e.g. 1.25m, and in case there is it rotates randomly until there are no more obstacle. For this, the agent uses the topics & services listed in the mavros section, and the `/scan` topic described in the ping360 driver section.
429 |
430 | ### Simulated BlueROV2
431 |
432 | **Simulated BlueROV2:** To simulate the BlueROV2 we are using Gazebo (Ignition). Unfortunately, until the moment of writing this readme, there is no sonar plugin for Ignition. Thus, we are using a lidar plugin instead, configured to have the same speed and measurement range as the Ping360 sonar. The bluerov2 model is [here](https://github.com/Rezenders/bluerov2_ignition/blob/main/models/bluerov2/model.sdf) and the bluerov2 model with a lidar is [here](https://github.com/Rezenders/bluerov2_ignition/blob/main/models/bluerov2_lidar/model.sdf). The world being used for the simulation can be found [here](https://github.com/remaro-network/remaro_worlds/blob/ign-garden/worlds/room_walls.world), note that there is a buoyancy plugin that sets the "water" density to 1000kg/m3.
433 |
434 | **Simulated "sonar" bridge:** In order to have access to the simulated lidar data with ROS2 we run a bridge between ignition transport and ROS2. Something like this:
435 |
436 | Via command line:
437 | ```
438 | ros2 run ros_gz_bridge parameter_bridge lidar@sensor_msgs/msg/LaserScan@ignition.msgs.LaserScan -r /lidar:=/scan
439 | ```
440 |
441 | With launch file:
442 | ```
443 | package='ros_gz_bridge',
444 | executable='parameter_bridge',
445 | arguments=['lidar@sensor_msgs/msg/LaserScan@ignition.msgs.LaserScan'],
446 | remappings=[('/lidar','/scan')],
447 | output='screen'
448 | ```
449 |
450 | Note that the topic where the lidar data is published has the same name (`/scan`) and type (`sensor_msgs/LaserScan`) as the topic published by the ping360 driver.
451 |
452 | **ArduSub Sofware In The Loop (SITL):** Since when running the simulation we don't have a board with an autopilot installed, we simulate Ardusub as a SITL.
453 |
454 | **Ardupilot gazebo plugin:** Bridge between Ignition and Ardusub. More info can be found [here](https://gazebosim.org/api/gazebo/7.0/ardupilot.html).
455 |
456 | **MAVROS:** The only difference is that for the simulation we need to use a different `fcu_url`. In this case, `udp://:14551@:14555`.
457 |
458 | **Agent:** Since all the interfaces are the same, the agent nodes are the same for both simulation and the real robot.
459 |
460 | ## Exercises
461 |
462 | The main exercise of this training is to implement an avoidance algorithm based on potential fields, you can find more info on the issue [#36](https://github.com/remaro-network/tudelft_hackathon/issues/36).
463 |
464 | Check [PARTICIPANTS_TODO](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/PARTICIPANTS_TODO.md#activities-to-be-done-during-hackathon) for extra info.
465 |
466 | ## Additional info
467 |
468 | ### SSH into bluerov (blueOS)
469 |
470 | Password: raspberry
471 | ```Bash
472 | $ ssh pi@192.168.2.2
473 | ```
474 |
475 | ## Related repository
476 |
477 | [SUAVE](https://github.com/kas-lab/suave#install-the-exemplar-locally): An Exemplar for Self-Adaptive Underwater Vehicles
478 |
--------------------------------------------------------------------------------
40 |
41 |
42 | This project has received funding from the European Union's Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie grant agreement No. 956200.
43 |
44 | ## Summary
45 | - [Computer setup](https://github.com/remaro-network/tudelft_hackathon#setup)
46 | - [Bluerov setup](https://github.com/remaro-network/tudelft_hackathon#bluerov-setup)
47 | * [Installation](https://github.com/remaro-network/tudelft_hackathon#installation)
48 | - [Install prerequisites to run with docker](https://github.com/remaro-network/tudelft_hackathon#install-prerequisites-to-run-with-docker)
49 | - [Install locally](https://github.com/remaro-network/tudelft_hackathon#install-locally)
50 | - [Run it with docker via CLI](https://github.com/remaro-network/tudelft_hackathon#run-it-with-docker-via-cli)
51 | - [Run with docker with VSCode ](https://github.com/remaro-network/tudelft_hackathon#run-it-with-docker-with-vscode)
52 | - [Run locally](https://github.com/remaro-network/tudelft_hackathon#run-it-locally)
53 | - [Explanation](https://github.com/remaro-network/tudelft_hackathon#explanation)
54 | - [Exercises](https://github.com/remaro-network/tudelft_hackathon#exercises)
55 | - [Additional information](https://github.com/remaro-network/tudelft_hackathon#additional-info)
56 |
57 | ## Setup
58 |
59 | Tested with:
60 | - Ubuntu 22.04
61 | - [ROS2 Humble](https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html)
62 | - [Gazebo (Ignition) Garden](https://gazebosim.org/docs/garden/install_ubuntu)
63 | - [ArduPilot (Sub-4.1)](https://github.com/ArduPilot/ardupilot/tree/f2af3c7ed2907be914c41d8512654a77498d3870)
64 | - [ardupilot_gazebo plugin](https://github.com/ArduPilot/ardupilot_gazebo/tree/ignition-garden)
65 | - [mavros2](https://github.com/mavlink/mavros)
66 | - [remaro_world](https://github.com/remaro-network/remaro_worlds/tree/ign-garden)
67 | - [bluerov2_ignition](https://github.com/Rezenders/bluerov2_ignition)
68 |
69 | ## Bluerov Setup
70 |
71 | - BlueOS (v1.0.1)
72 |
73 | ## Installation
74 |
75 | There are 3 options to use this repo.
76 | Install everything locally in your computer. This will require some effort, but when done should be easier to use.
77 | Run everything with docker (read disclaimer bellow):
78 | - Via the CLI. This option should be faster to reproduce everything, but is a little bit annoying for development.
79 | - Using VSCode. Requires installing VSCode. Should be easier way to use everything. (work in progress)
80 |
81 | **Disclaimer**
82 | Running docker images with graphical user interface is a little bit trick and might not work in all systems.
83 | We tested in a system with ubuntu 22.04 and with a NVIDIA gpu.
84 | It might not work on systems with AMD gpus, and on MAC.
85 | We are going to try to fix this problem until the hackathon, but it is not guaranteed.
86 | In those cases go for the [local installation](https://github.com/remaro-network/tudelft_hackathon#install-locally).
87 |
88 | ### Install prerequisites to run with docker
89 |
90 | - Install docker on your machine. You can find instructions [here](https://docs.docker.com/engine/install/ubuntu/)
91 | - Allow non-root users to manage docker. Instructions [here](https://docs.docker.com/engine/install/linux-postinstall/#manage-docker-as-a-non-root-user)
92 | - Install VSCode. Instructions [here](https://code.visualstudio.com/download)
93 | - Install [nvidia-docker](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#docker)(only needed if you have a nvidia GPU)
94 |
95 | ### Configure computer to connect with the BlueROV2
96 | Follow [Bluerobotics instructions](https://bluerobotics.com/learn/bluerov2-software-setup/#software-introduction)
97 |
98 | ### Install locally
99 | #### Install Gazebo Garden
100 |
101 | Follow the [official instructions](https://gazebosim.org/docs/garden/install_ubuntu) for installing Gazebo Garden.
102 |
103 | #### Install ROS2 Humble
104 |
105 | Follow the [official instructions](https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html) for installing ROS2 Humble.
106 |
107 | #### Install ardusub
108 |
109 | Instructions can be found [here](https://ardupilot.org/dev/docs/building-setup-linux.html#building-setup-linux)
110 |
111 | **Disclaimer:**
112 | Problems may occur with different combinations of ArduPilot and MavROS versions.
113 |
114 | ```Bash
115 | cd ~/
116 | git clone https://github.com/ArduPilot/ardupilot.git
117 | cd ardupilot
118 | git checkout e9f46b9
119 | git submodule update --init --recursive
120 | ```
121 |
122 | Note that the script used to install prerequisites available for this
123 | version of ArduSub does not work in Ubuntu 22.04. Therefore, you need to replace them before
124 | running ArduSub. To install the ArduPilot prerequisites, do the following.
125 |
126 | ```Bash
127 | cd ~/ardupilot
128 | cd Tools/environment_install/
129 | rm install-prereqs-ubuntu.sh
130 | wget https://raw.githubusercontent.com/ArduPilot/ardupilot/master/Tools/environment_install/install-prereqs-ubuntu.sh
131 | cd ~/ardupilot
132 | chmod +x Tools/environment_install/install-prereqs-ubuntu.sh
133 | Tools/environment_install/install-prereqs-ubuntu.sh -y
134 | . ~/.profile
135 | ```
136 |
137 | If you want to use MAC, follow [this instruction](https://ardupilot.org/dev/docs/building-setup-mac.html)
138 |
139 | To test if the installation worked, run:
140 |
141 | ```Bash
142 | sim_vehicle.py -v ArduSub -L RATBeach --console --map
143 | ```
144 |
145 | Ardupilot SITL should open and a console plus a map should appear.
146 |
147 | **Troubleshoot**
148 | If you have problems with the install-prereqs-ubuntu.sh script try to install the dependencies manually with the following commands.
149 |
150 | ```Bash
151 | pip3 install --user -U future lxml pymavlink MAVProxy pexpect flake8 geocoder empy dronecan pygame intelhex
152 | ```
153 |
154 | ```Bash
155 | sudo apt-get --assume-yes install build-essential ccache g++ gawk git make wget python-is-python3 libtool libxml2-dev libxslt1-dev python3-dev python3-pip python3-setuptools python3-numpy python3-pyparsing python3-psutil xterm python3-matplotlib python3-serial python3-scipy python3-opencv libcsfml-dev libcsfml-audio2.5 libcsfml-dev libcsfml-graphics2.5 libcsfml-network2.5 libcsfml-system2.5 libcsfml-window2.5 libsfml-audio2.5 libsfml-dev libsfml-graphics2.5 libsfml-network2.5 libsfml-system2.5 libsfml-window2.5 python3-yaml libpython3-stdlib python3-wxgtk4.0 fonts-freefont-ttf libfreetype6-dev libpng16-16 libportmidi-dev libsdl-image1.2-dev libsdl-mixer1.2-dev libsdl-ttf2.0-dev libsdl1.2-dev libtool-bin g++-arm-linux-gnueabihf lcov gcovr
156 | ```
157 |
158 | #### Install ardusub_plugin
159 |
160 | Install dependencies:
161 |
162 | ```Bash
163 | sudo apt install rapidjson-dev libgz-sim7-dev
164 | ```
165 |
166 | Clone and build repo:
167 |
168 | ```Bash
169 | cd ~/
170 | git clone https://github.com/ArduPilot/ardupilot_gazebo
171 | cd ardupilot_gazebo
172 | mkdir build && cd build
173 | cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo
174 | make -j4
175 | ```
176 |
177 | Add required paths:
178 |
179 | Assuming that you have clone the repository in `$HOME/ardupilot_gazebo`:
180 | ```bash
181 | echo 'export GZ_SIM_SYSTEM_PLUGIN_PATH=$HOME/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc
182 | echo 'export GZ_SIM_RESOURCE_PATH=$HOME/ardupilot_gazebo/models:$HOME/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
183 | ```
184 |
185 | Reload your terminal with source ~/.bashrc
186 |
187 | More info about the plugin can be found in the [repo](https://github.com/ArduPilot/ardupilot_gazebo/tree/ignition-garden)
188 |
189 | #### Install hackathon workspace
190 |
191 | Create new workspace:
192 | ```Bash
193 | mkdir -p ~/tudelft_hackathon_ws/src
194 | cd ~/tudelft_hackathon_ws
195 | ```
196 |
197 | Clone repos:
198 | ```Bash
199 | wget https://raw.githubusercontent.com/remaro-network/tudelft_hackathon/ros2/hackathon.rosinstall
200 | vcs import src < hackathon.rosinstall --recursive
201 | ```
202 |
203 | Add required paths:
204 | ```Bash
205 | echo 'export GZ_SIM_RESOURCE_PATH=$HOME/tudelft_hackathon_ws/src/bluerov2_ignition/models:$HOME/tudelft_hackathon_ws/src/bluerov2_ignition/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
206 |
207 | echo 'export GZ_SIM_RESOURCE_PATH=$HOME/tudelft_hackathon_ws/src/remaro_worlds/models:$HOME/tudelft_hackathon_ws/src/remaro_worlds/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
208 | ```
209 |
210 | Before building the `ros_gz` package (one of the dependencies), you need to export the gazebo version:
211 |
212 | ```
213 | export GZ_VERSION="garden"
214 | ```
215 | You can also add this to your `~/.bashrc` to make this process easier.
216 |
217 | Install deps:
218 | ```Bash
219 | source /opt/ros/humble/setup.bash
220 | cd ~/tudelft_hackathon_ws/
221 | rosdep install --from-paths src --ignore-src -r -y
222 | ```
223 |
224 | Build project:
225 | ```Bash
226 | cd ~/tudelft_hackathon_ws/
227 | colcon build --symlink-install
228 | ```
229 |
230 | ## Run it with docker via CLI
231 |
232 | Create docker network:
233 |
234 | ```Bash
235 | sudo docker network create ros_net
236 | ```
237 |
238 | ### Run Ignition simulation + ardupilot SITL:
239 |
240 | If you a NVIDIA GPU:
241 | ```Bash
242 | xhost +local:root
243 | sudo docker run -it --rm --name ignition --net ros_net -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --gpus all ghcr.io/remaro-network/tudelft_hackathon:nvidia ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py ardusub:=true mavros_url:='bluerov:14551'
244 | ```
245 |
246 | If you have an AMD GPU:
247 | ```Bash
248 | xhost +local:root ;
249 | sudo docker run -it --rm --name ignition --net ros_net -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --device=/dev/dri --group-add video ghcr.io/remaro-network/tudelft_hackathon:non-nvidia ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py ardusub:=true mavros_url:='bluerov:14551'
250 | ```
251 |
252 | If you have an Intel GPU:
253 | ```Bash
254 | xhost +local:root ;
255 | sudo docker run -it --rm --name ignition --net ros_net -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix:ro --device=/dev/dri:/dev/dri ghcr.io/remaro-network/tudelft_hackathon:non-nvidia ros2 launch tudelft_hackathon bluerov_ign_sim.launch.py ardusub:=true mavros_url:='bluerov:14551'
256 | ```
257 |
258 | ### Run bluerov software:
259 |
260 | ```Bash
261 | sudo docker run -it --rm --name bluerov --net ros_net ghcr.io/remaro-network/tudelft_hackathon_base:latest ros2 launch tudelft_hackathon bluerov_bringup_no_ign.launch.py fcu_url:=udp://:14551@ignition:14555
262 | ```
263 |
264 | ### Development with docker via cli
265 |
266 | To add your modifications into the docker images you need to rebuild the relevant docker images.
267 | In this case, run the `build-dev-images.sh` script to rebuild them. And make sure to substitute in the `docker run` commands the images from rezenders to you local images. I.e: `rezenders/ignition:hackathon` -> `ignition:hackathon-dev` and `rezenders/ros-foxy-hackathon` -> `ros-foxy-hackathon:dev`
268 |
269 | ## Run it with docker with VSCode
270 |
271 | Check instructions [here](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/dockerfiles/ros1-2-ignition/README.md)
272 |
273 | ## Run it locally
274 |
275 | ### Simulation
276 | Before running anything you need to source the workspace. With this command:
277 |
278 | ```Bash
279 | source ~/tudelft_hackathon_ws/install/setup.bash
280 | ```
281 |
282 | Or you can add that to the ~/.bashrc file to prevent needing to source everytime.
283 |
284 | ```Bash
285 | echo "source ~/tudelft_hackathon_ws/install/setup.bash" >> ~/.bashrc
286 | ```
287 | Don't forget to re-open your terminal after altering the `~/.bashrc` file.
288 |
289 | In one terminal run ardusub SITL:
290 | ```Bash
291 | sim_vehicle.py -L RATBeach -v ArduSub --model=JSON --console
292 | ```
293 |
294 | In another terminal run the simulation + mavros + agent:
295 | ```Bash
296 | ros2 launch tudelft_hackathon bluerov_bringup.launch.py simulation:=true ardusub:=false
297 | ```
298 |
299 | ### Bluerov2
300 |
301 | ```Bash
302 | ros2 launch tudelft_hackathon bluerov_bringup.launch.py simulation:=false
303 | ```
304 |
305 | ## Explanation
306 |
307 | Simplified system architecture:
308 |
309 | 
310 |
311 | The system was designed to be used both with a real or simulated BlueROV2. When
312 | used with a simulation, the left nodes are deployed. And when used with the real
313 | robot the right nodes are deployed.The agent and MAVROS nodes are always deployed.
314 |
315 | First, let's take a look on how the real BlueROV2 works, then we see how the simulation
316 | is setup to mimic it.
317 |
318 | ### Real BlueROV2
319 |
320 | **BlueROV2:** The BlueROV2 that is going to be used for the hackathon has the [heavy configuration](https://bluerobotics.com/store/rov/bluerov2-upgrade-kits/brov2-heavy-retrofit/). It is equipped with the [Ping 360](https://bluerobotics.com/store/sensors-sonars-cameras/sonar/ping360-sonar-r1-rp/) mechanical scanning sonar mounted in the [standard location](https://bluerobotics.com/learn/ping360-installation-guide-for-the-bluerov2/#mounting-the-ping360-to-the-embluerov2em-frame-heavy). And ArduSub runs on a [Pixhawk](https://bluerobotics.com/store/comm-control-power/control/pixhawk-r1-rp/).
321 |
322 | **Ping360 sonar driver:** To get data from the sonar the [ping360_sonar](https://github.com/CentraleNantesRobotics/ping360_sonar) ROS2 package is being used. It provides data in the following topics:
323 |
324 | | Topic | Message type | Description |
325 | | ------------- | ------------- | ------------- |
326 | | /scan_image | [sensor_msgs/Image](https://github.com/ros2/common_interfaces/blob/master/sensor_msgs/msg/Image.msg) | The generated sonar image in gray level|
327 | | /echo | [ping360_sonar_msg/SonarEcho](https://github.com/CentraleNantesRobotics/ping360_sonar/blob/ros2/ping360_sonar_msgs/msg/SonarEcho.msg) | Raw sonar data|
328 | | /scan | [sensor_msgs/LaserScan](https://github.com/ros2/common_interfaces/blob/master/sensor_msgs/msg/LaserScan.msg) | Publishes a LaserScan msg with ranges detected above a certain intensity threshold (0-255). The intensities of the message are scaled down to (0,1)|
329 |
330 | Using this package, the Ping360 sonar takes between 6 and 10 seconds to complete a 360 degree rotation.
331 |
332 | **ArduSub:** According to their [website](https://www.ardusub.com/) ArduSub is "is a fully-featured open-source solution for remotely operated underwater vehicles (ROVs) and autonomous underwater vehicles (AUVs). ArduSub is a part of the [ArduPilot](https://ardupilot.org/) project, and was originally derived from the ArduCopter code. ArduSub has extensive capabilities out of the box including feedback stability control, depth and heading hold, and autonomous navigation".
333 |
334 | With the current configuration, BlueROV2 is not able to calculate its 3D position as there are no sensors that provide enough information for this, such as DVL, underwater GPS, etc.
335 | Thus, it is only possible to operate the robot using [flight modes](https://ardupilot.org/copter/docs/flight-modes.html#gps-dependency) that don't require positioning data, such as MANUAL, STABILIZE, and DEPTH HOLD. See [ArduSub flight modes](https://www.ardusub.com/reference/ardusub/features-while-in-operation.html#flight-modes).
336 | Consequently, it is not possible to send waypoints or velocity commands to the robot, the only way to operate it is by overriding the [RC inputs](https://www.ardusub.com/developers/rc-input-and-output.html#rc-inputs).
337 |
338 | **MAVROS:** The [MAVROS](https://github.com/mavlink/mavros) package is used to bridge the communication between ROS and mavlink, which is the communication protocol used by ArduSub. Which means MAVROS can be used as a bridge between ROS and ArduSub. To connect it to ArduSub it necesary to set the following parameters:
339 | - `fcu_url`: Address of the flight controller unit. For this case: `udp://192.168.2.1:14550@192.168.2.2:14555`
340 |
341 | MAVROS provides an extensive number of topics and services to interact with autopilots, you can check the full list [here](http://wiki.ros.org/mavros). For our use case, the topics and services being used are:
342 |
343 | | Topic | Message type | Description |
344 | | ------------- | ------------- | ------------- |
345 | | mavros/state | [mavros_msgs/State](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/msg/State.msg) |Provides the FCU state |
346 | | mavros/rc/override | [mavros_msgs/OverrideRCIn](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/msg/OverrideRCIn.msg) | Send RC override message to FCU |
347 |
348 | | Service | Message type | Description |
349 | | ------------- | ------------- | ------------- |
350 | | mavros/set_mode |[mavros_msgs/SetMode](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/srv/SetMode.srv)| Set FCU flight mode |
351 | | mavros/cmd/arming |[mavros_msgs/CommandBool](https://github.com/mavlink/mavros/blob/ros2/mavros_msgs/srv/CommandBool.srv)| Change arming status|
352 |
353 |
354 | To simplify interactions with MAVROS, a [wrapper](https://github.com/remaro-network/mavros_wrapper) was setup with the basic functionalities needed for this hackathon. It works like this:
355 |
356 | ```Python
357 | from mavros_wrapper.ardusub_wrapper import * # Import wrapper
358 |
359 | ardusub = BlueROVArduSubWrapper("ardusub_node") # create new instance with desired node name
360 | status = ardusub.status # to get FCU status
361 | ardusub.set_mode("MANUAL") # set FCU flight mode to MANUAL
362 | ardusub.arm_motors(True) # arm motors
363 | ardusub.toogle_rc_override(True) # start overriding RC
364 | ardusub.set_rc_override_channels(forward=0.5) # set values to override
365 | ```
366 |
367 | **Agent:** The agent node is the one that decides how the robot should behave.
368 | For this hackathon, we setup two different nodes with simple behaviors:
369 |
370 | The [bluerov_agent](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/scripts/bluerov_agent.py) has the following behavior. The robot set its flight mode to `MANUAL`, then arms the thrusters, then go around in a square path once. For this, the agent uses the topics & services listed in the mavros section.
371 |
372 | Let's break the code and understand what's going on below the surface.
373 |
374 | The main function:
375 | ```Python
376 | if __name__ == '__main__':
377 | rclpy.init(args=sys.argv)
378 |
379 | ardusub = BlueROVArduSubWrapper("ardusub_node")
380 |
381 | thread = threading.Thread(target=rclpy.spin, args=(ardusub, ), daemon=True)
382 | thread.start()
383 |
384 | mission(ardusub)
385 | ```
386 | First the `rclpy` library is initialized. Then the ardusub node is created using the `BlueROVArduSubWrapper` class defined in the `mavros_wrapper` package. Following, a new thread is created to spin the ardusub node in parallel, this is necessary because we are going to use some sleep functions in the main thread later and we want the ardusub node to keep spinning despite of that. Lastly, the `mission` function is called, which is where the mission of the robot is defined.
387 |
388 | Now let's take a look in the `mission` function
389 | ```Python
390 | def mission(ardusub):
391 |
392 | service_timer = ardusub.create_rate(2)
393 | while ardusub.status.mode != "MANUAL":
394 | ardusub.set_mode("MANUAL")
395 | service_timer.sleep()
396 |
397 | print("Manual mode selected")
398 |
399 | while ardusub.status.armed == False:
400 | ardusub.arm_motors(True)
401 | service_timer.sleep()
402 |
403 | print("Thrusters armed")
404 |
405 | print("Initializing mission")
406 |
407 | timer = ardusub.create_rate(0.5) # Hz
408 |
409 | ardusub.toogle_rc_override(True)
410 | ardusub.set_rc_override_channels(forward=0.5)
411 | timer.sleep()
412 | ardusub.set_rc_override_channels(lateral=0.5)
413 | timer.sleep()
414 | ardusub.set_rc_override_channels(forward=-0.5)
415 | timer.sleep()
416 | ardusub.set_rc_override_channels(lateral=-0.5)
417 | timer.sleep()
418 | ardusub.set_rc_override_channels(lateral=0)
419 | ardusub.toogle_rc_override(False)
420 |
421 | print("Mission completed")
422 | ```
423 | A `service_timer` timer is created with 2Hz rate. Then we have a while loop that keeps trying to change the flight mode to `MANUAL` until the flight mode is set to `MANUAL`, note that the `ardusub.set_mode("MANUAL")` method from the mavros_wrapper explained earlier is used for this, and that the `service_timer` is used to make the loop wait for 0.5 seconds before repeating. Following, we have a similar loop to arm the motors.
424 |
425 | After that, we create a new timer with 0.5Hz rate. The `ardusub.toogle_rc_override(True)` method is called to make the ardusub node start publishing messages in the `/mavros/rc/override` topic. Then, we use the method `ardusub.set_rc_override_channels(forward=0.5)` to make the robot move forward with half of its thrust, this is achieved internally by the ardusub node by publishing the appropriate message in the `/mavros/rc/override` topic. Following, the program sleeps for 2 seconds and then we make the robot move again to other directions, in order to go "around" a square. And that is it.
426 |
427 |
428 | The [random_wall_avoidance](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/scripts/random_wall_avoidance.py) has the following behavior. The robot set its flight mode to `ALT HOLD`, then arms the thrusters, then starts moving forward. The agent subscribes to the sonar topic and every time it receives sonar readings it checks if there is an obstacle in its front, e.g. 180°, closer than a certain threshold, e.g. 1.25m, and in case there is it rotates randomly until there are no more obstacle. For this, the agent uses the topics & services listed in the mavros section, and the `/scan` topic described in the ping360 driver section.
429 |
430 | ### Simulated BlueROV2
431 |
432 | **Simulated BlueROV2:** To simulate the BlueROV2 we are using Gazebo (Ignition). Unfortunately, until the moment of writing this readme, there is no sonar plugin for Ignition. Thus, we are using a lidar plugin instead, configured to have the same speed and measurement range as the Ping360 sonar. The bluerov2 model is [here](https://github.com/Rezenders/bluerov2_ignition/blob/main/models/bluerov2/model.sdf) and the bluerov2 model with a lidar is [here](https://github.com/Rezenders/bluerov2_ignition/blob/main/models/bluerov2_lidar/model.sdf). The world being used for the simulation can be found [here](https://github.com/remaro-network/remaro_worlds/blob/ign-garden/worlds/room_walls.world), note that there is a buoyancy plugin that sets the "water" density to 1000kg/m3.
433 |
434 | **Simulated "sonar" bridge:** In order to have access to the simulated lidar data with ROS2 we run a bridge between ignition transport and ROS2. Something like this:
435 |
436 | Via command line:
437 | ```
438 | ros2 run ros_gz_bridge parameter_bridge lidar@sensor_msgs/msg/LaserScan@ignition.msgs.LaserScan -r /lidar:=/scan
439 | ```
440 |
441 | With launch file:
442 | ```
443 | package='ros_gz_bridge',
444 | executable='parameter_bridge',
445 | arguments=['lidar@sensor_msgs/msg/LaserScan@ignition.msgs.LaserScan'],
446 | remappings=[('/lidar','/scan')],
447 | output='screen'
448 | ```
449 |
450 | Note that the topic where the lidar data is published has the same name (`/scan`) and type (`sensor_msgs/LaserScan`) as the topic published by the ping360 driver.
451 |
452 | **ArduSub Sofware In The Loop (SITL):** Since when running the simulation we don't have a board with an autopilot installed, we simulate Ardusub as a SITL.
453 |
454 | **Ardupilot gazebo plugin:** Bridge between Ignition and Ardusub. More info can be found [here](https://gazebosim.org/api/gazebo/7.0/ardupilot.html).
455 |
456 | **MAVROS:** The only difference is that for the simulation we need to use a different `fcu_url`. In this case, `udp://:14551@:14555`.
457 |
458 | **Agent:** Since all the interfaces are the same, the agent nodes are the same for both simulation and the real robot.
459 |
460 | ## Exercises
461 |
462 | The main exercise of this training is to implement an avoidance algorithm based on potential fields, you can find more info on the issue [#36](https://github.com/remaro-network/tudelft_hackathon/issues/36).
463 |
464 | Check [PARTICIPANTS_TODO](https://github.com/remaro-network/tudelft_hackathon/blob/ros2/PARTICIPANTS_TODO.md#activities-to-be-done-during-hackathon) for extra info.
465 |
466 | ## Additional info
467 |
468 | ### SSH into bluerov (blueOS)
469 |
470 | Password: raspberry
471 | ```Bash
472 | $ ssh pi@192.168.2.2
473 | ```
474 |
475 | ## Related repository
476 |
477 | [SUAVE](https://github.com/kas-lab/suave#install-the-exemplar-locally): An Exemplar for Self-Adaptive Underwater Vehicles
478 |
--------------------------------------------------------------------------------