├── .gitignore
├── docs
└── imgs
│ ├── ros_logo.png
│ ├── image_view_example.png
│ ├── rostopic_echo_result.png
│ └── rostopic_list_result.png
├── config
├── costmap_common_params.yaml
├── global_costmap_params.yaml
├── local_costmap_params.yaml
├── base_local_planner_params.yaml
├── dwa_local_planner_params.yaml
├── tag_poses_maze_3.yaml
├── robot_pose.rviz
├── ar_tag_navigation.rviz
└── tag_sizes.yaml
├── launch
├── static_transforms.launch
├── robot_pose.launch
├── rviz.launch
├── apriltag_detector.launch
└── move_base.launch
├── LICENSE
├── start_ground_truth_demo.sh
├── scripts
├── static_transform_broadcaster.py
└── robot_pose.py
├── start_demo.sh
├── package.xml
├── start_nav_demo.sh
├── README.md
└── CMakeLists.txt
/.gitignore:
--------------------------------------------------------------------------------
1 | *.log
2 |
--------------------------------------------------------------------------------
/docs/imgs/ros_logo.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/rfzeg/apriltag_robot_pose/HEAD/docs/imgs/ros_logo.png
--------------------------------------------------------------------------------
/docs/imgs/image_view_example.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/rfzeg/apriltag_robot_pose/HEAD/docs/imgs/image_view_example.png
--------------------------------------------------------------------------------
/docs/imgs/rostopic_echo_result.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/rfzeg/apriltag_robot_pose/HEAD/docs/imgs/rostopic_echo_result.png
--------------------------------------------------------------------------------
/docs/imgs/rostopic_list_result.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/rfzeg/apriltag_robot_pose/HEAD/docs/imgs/rostopic_list_result.png
--------------------------------------------------------------------------------
/config/costmap_common_params.yaml:
--------------------------------------------------------------------------------
1 | map_type: costmap
2 |
3 | obstacle_range: 4.0
4 | raytrace_range: 5.0
5 |
6 | transform_tolerance: 1.0
7 |
8 | #observation_sources: laser_scan_sensor
9 |
10 | #laser_scan_sensor: {
11 | # sensor_frame: hokuyo,
12 | # data_type: LaserScan,
13 | # topic: /udacity_bot/laser/scan,
14 | # marking: true,
15 | # clearing: true
16 | #}
17 |
--------------------------------------------------------------------------------
/launch/static_transforms.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
--------------------------------------------------------------------------------
/LICENSE:
--------------------------------------------------------------------------------
1 | MIT License
2 |
3 | Copyright (c) 2019 Roberto Zegers R.
4 |
5 | Permission is hereby granted, free of charge, to any person obtaining a copy
6 | of this software and associated documentation files (the "Software"), to deal
7 | in the Software without restriction, including without limitation the rights
8 | to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
9 | copies of the Software, and to permit persons to whom the Software is
10 | furnished to do so, subject to the following conditions:
11 |
12 | The above copyright notice and this permission notice shall be included in all
13 | copies or substantial portions of the Software.
14 |
15 | THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
16 | IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
17 | FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
18 | AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
19 | LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
20 | OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
21 | SOFTWARE.
22 |
--------------------------------------------------------------------------------
/launch/robot_pose.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
--------------------------------------------------------------------------------
/config/global_costmap_params.yaml:
--------------------------------------------------------------------------------
1 | # Independent settings for the global planner's costmap
2 | global_costmap:
3 | global_frame: map # sets what coordinate frame the costmap should run in
4 | robot_base_frame: robot_footprint
5 | update_frequency: 2.0 # the Hz at which the costmap will run its update loop
6 | publish_frequency: 1.0 # the Hz at which the costmap will publish visualization information
7 | width: 20.0
8 | height: 20.0
9 | resolution: 0.05
10 | static_map: true # determines whether or not to load an existent map provided by the map_server
11 | rolling_window: false
12 |
13 | inflation_radius: 0.4 # max. distance from an obstacle at which costs are incurred for planning paths
14 | cost_scaling_factor: 4.0 # exponential rate at which the obstacle cost drops off, setting it higher will make the decay curve more steep
15 |
16 | # define the coordinates of the robot outline
17 | footprint: [[0.25,0.16],[0.25,-0.16],[-0.25,-0.16],[-0.25,0.16]]
18 | #robot_radius: 0.4
19 | footprint_padding: 0.1
20 |
21 | # If no plugins parameters are provided the initialization code will assume that the configuration is pre-Hydro and will load a default set of plugins with default namespaces
22 | plugins:
23 | - {name: static_layer, type: "costmap_2d::StaticLayer"}
24 | - {name: inflation_layer, type: "costmap_2d::InflationLayer"}
25 |
--------------------------------------------------------------------------------
/start_ground_truth_demo.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | echo ""
4 | echo "ROS Robot Pose Ground Truth Demo"
5 | echo ""
6 | # The -e option to xterm is useful for running a single command and then exiting (or closing xterm after a Ctrl+C)
7 |
8 | # Fire up Gazebo world with maze environment
9 | xterm -e "roslaunch plywood_mazes maze_3_6x6.launch" &
10 | sleep 6
11 |
12 | # Prompt for a key press to continue after Gazebo has loaded
13 | read -n 1 -r -s -p "Press any key to continue once Gazebo has loaded or Ctrl+C to abort..."
14 | echo ""
15 |
16 | # Load robot description to parameter server and spawn a robot
17 | xterm -e "roslaunch rtab_dumpster spawn_rtab_dumpster.launch diff_drive_publishTf:=false diff_drive_publishOdomTF:=false" &
18 | sleep 4
19 |
20 | # Get ground truth odometry from Gazebo and publish as odom msg
21 | xterm -e "roslaunch noisy_odometry odom_msg_from_gazebo.launch" &
22 | sleep 4
23 |
24 | # Broadcast odom w.r.t. map Tf from odom msg
25 | xterm -e "roslaunch noisy_odometry odom_msg_to_map_tf.launch" &
26 | sleep 4
27 |
28 | # Allow for Rviz choice
29 | echo ""
30 | read -p "Do you want to start RVIZ with a preconfigured view (y/n): " input_choice
31 |
32 | if [ "$input_choice" = "y" ]
33 | then
34 | # Start RVIZ
35 | xterm -e "roslaunch apriltag_robot_pose rviz.launch" &
36 | sleep 4
37 | # Load pre-made map using map server
38 | xterm -e "roslaunch plywood_mazes map_server_maze_3.launch"
39 | elif [ "$input_choice" = "n" ]
40 | then
41 | echo ""
42 | echo "Rviz *NOT* started!"
43 | echo ""
44 | else
45 | echo ""
46 | echo "Warning: Not an acceptable option. Choose (y/n)"
47 | echo ""
48 | fi
49 |
--------------------------------------------------------------------------------
/launch/rviz.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
--------------------------------------------------------------------------------
/launch/apriltag_detector.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
--------------------------------------------------------------------------------
/scripts/static_transform_broadcaster.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/env python
2 |
3 | # Broadcasts static transforms. Used here to publish multiple map frame to tag frame transforms.
4 | # Author: Roberto Zegers R.
5 | # Date: 2019 June
6 |
7 | import rospy
8 | import tf_conversions # because of transformations
9 | import tf2_ros
10 | import geometry_msgs.msg
11 | import yaml
12 |
13 | def broadcast_pose(tag_info):
14 | br = tf2_ros.TransformBroadcaster()
15 |
16 | for tag_id, tf_data in tag_info.iteritems():
17 | t = geometry_msgs.msg.TransformStamped()
18 | t.header.stamp = rospy.Time.now()
19 | t.header.frame_id = "map"
20 | t.child_frame_id = "tag_" + str(tag_id)
21 | t.transform.translation.x = tf_data[0]
22 | t.transform.translation.y = tf_data[1]
23 | t.transform.translation.z = tf_data[2]
24 | q = tf_conversions.transformations.quaternion_from_euler(tf_data[3], tf_data[4], tf_data[5])
25 | t.transform.rotation.x = q[0]
26 | t.transform.rotation.y = q[1]
27 | t.transform.rotation.z = q[2]
28 | t.transform.rotation.w = q[3]
29 | br.sendTransform(t)
30 |
31 | if __name__ == '__main__':
32 | rospy.init_node('tag_broadcaster')
33 | rospy.loginfo("\n Initialized static transform broadcaster \n")
34 |
35 | ## Load tag_info parameters from yaml file
36 | # Get a parameter from our private namespace
37 | param_path = rospy.get_param("~tag_poses_param_path")
38 | rospy.loginfo("Tag poses broadcasted: %s", param_path)
39 | f = open(param_path, 'r')
40 | params_raw = f.read()
41 | f.close()
42 |
43 | params = yaml.load(params_raw)
44 | # Dictionary with tag poses: [x, y, z, Roll, Pitch, Yaw]
45 | tag_info = params['tag_info']
46 | #rospy.loginfo("Tag info dict: %s", tag_info)
47 |
48 | rate = rospy.Rate(10) # 10hz or 100 ms
49 |
50 | while not rospy.is_shutdown():
51 | broadcast_pose(tag_info)
52 | rate.sleep()
53 |
--------------------------------------------------------------------------------
/config/local_costmap_params.yaml:
--------------------------------------------------------------------------------
1 | # Independent settings for the local costmap
2 | local_costmap:
3 | global_frame: map # sets what coordinate frame the costmap should run in
4 | robot_base_frame: robot_footprint
5 | update_frequency: 2.0 # the Hz at which the costmap will run its update loop
6 | publish_frequency: 1.0 # the Hz at which the costmap will publish visualization information
7 | width: 5.0 # Width of the local costmap in meters (default: 10)
8 | height: 5.0 # Height of the local costmap in meters (default: 10)
9 | resolution: 0.05 # Resolution of the map in meters per cell
10 |
11 | inflation_radius: 0.4 # max. distance from an obstacle at which costs are incurred for planning paths
12 | cost_scaling_factor: 0.4 # exponential rate at which the obstacle cost drops off
13 |
14 | # define the coordinates of the robot outline
15 | footprint: [[0.25,0.16],[0.25,-0.16],[-0.25,-0.16],[-0.25,0.16]]
16 | #robot_radius: 0.4
17 | footprint_padding: 0.0 # lower than the padding used by the global planner
18 |
19 | publish_cost_grid: false # to visualize the cost function produced by the local planner in rviz (for debugging)
20 |
21 | # Use a static local costmap when generating local plans without any obstacle detection sensors
22 | static_map: true # determines whether or not the costmap should initialize itself based on a map served by the map_server
23 | rolling_window: false # true means the costmap will remain centered around the robot as the robot moves through the world
24 | #origin_x: -2.5
25 | #origin_y: -2.5
26 | # If no plugins parameters are provided the initialization code will assume that the configuration is pre-Hydro and will load a default set of plugins with default namespaces
27 | plugins:
28 | - {name: static_layer, type: "costmap_2d::StaticLayer"}
29 | - {name: inflation_layer, type: "costmap_2d::InflationLayer"}
30 | # - {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
31 |
--------------------------------------------------------------------------------
/launch/move_base.launch:
--------------------------------------------------------------------------------
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
--------------------------------------------------------------------------------
/config/base_local_planner_params.yaml:
--------------------------------------------------------------------------------
1 | # move_base parameters
2 | controller_frequency: 3.0 # rate at which move_base will be called in Hz (default: 20.0)
3 | planner_frequency: 0.5 # rate at which re-calculate the global path, in Hz (default: 0.0)
4 |
5 | TrajectoryPlannerROS:
6 |
7 | holonomic_robot: false
8 |
9 | # Parameters for setting the velocity limits of the robot
10 | max_vel_x: 0.3 # max fwd velocity allowed for the base in mt/s (default: 0.5)
11 | min_vel_x: 0.05 # min fwd velocity allowed, should be high enough to overcome friction (default: 0.1)
12 |
13 | # Parameters for evaluating possible local planner trajectories
14 | pdist_scale: 3.0 # weighting for how much the local path should stay close to the global path (default: 0.6)
15 | gdist_scale: 1.0 # weighting for how much the controller should attempt to reach its local goal, also controls speed (default 0.8)
16 | occdist_scale: 0.2 # weighting for how much the controller should attempt to avoid obstacles (default 0.01)
17 | meter_scoring: true # whether or not assume that goal_distance and path_distance are expressed in meters (default: false)
18 |
19 | heading_scoring: false # Whether to score based on the robot's heading to the path or its distance from the path (default: false)
20 |
21 | # Foward simulation parameters
22 | # Parameters that determine how far in advance and with what granularity trajectories are simulated
23 | sim_time: 3.5 # The amount of time (in sec) to forward-simulate trajectories, a higher value can result in slightly smoother trajectories (default: 0.025)
24 | sim_granularity: 0.025 # The step size, in meters, to take between points on a given trajectory (default: 0.025)
25 | # angular_sim_granularity: 0.5235987756 # The step size, in radians, to take between angular samples on a given trajectory
26 |
27 | # 0.025 rad 1.4323944878 deg
28 | # 0.0872664626 rad 5 deg
29 | # 0.1745329252 rad 10 deg
30 | # 0.2617993878 rad 15 deg
31 | # 0.5235987756 rad 30 deg
32 | # 0.7853981634 rad 45 deg
33 | # 1.0471975512 rad 60 deg
34 | # 1.5707963268 rad 90 deg
35 |
36 | vx_samples: 20.0 # The number of samples to use when exploring the x velocity space (int, default: 3)
37 | vtheta_samples: 40 # The number of samples to use when exploring the theta velocity space (int, default: 20)
38 |
39 | # Goal Tolerance Parameters
40 | yaw_goal_tolerance: 0.2617993878 # default is 0.05 rad (~3 degrees)
41 | xy_goal_tolerance: 0.2 # in meters, (default: 0.1)
42 | latch_xy_goal_tolerance: true # (default: false) if the goal position is reached it is considered permanently
43 |
44 | controller_frequency: 10.0 # rate at which TrajectoryPlannerROS will be called in Hz
45 |
46 | # debug parameters
47 | publish_cost_grid_pc: false
48 |
--------------------------------------------------------------------------------
/start_demo.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | echo ""
4 | echo "ROS AR Tag Robot Pose Estimator Demo"
5 | echo ""
6 | # The -e option to xterm is useful for running a single command and then exiting (or closing xterm after a Ctrl+C)
7 |
8 | # Fire up Gazebo world with maze environment
9 | xterm -e "roslaunch plywood_mazes maze_3_6x6.launch" &
10 | sleep 6
11 |
12 | # Prompt for a key press to continue after Gazebo has loaded
13 | #read -n 1 -r -s -p "Press any key to continue once Gazebo has loaded or Ctrl+C to abort..."
14 | #echo ""
15 |
16 | # Allow for noisy odometry choice
17 | echo ""
18 | read -p "After Gazebo has loaded, do you want to start a noisy odometry node? (y/n): " input_choice_1
19 |
20 | if [ "$input_choice_1" = "y" ]
21 | then
22 | # Load robot description to parameter server and spawn a robot
23 | xterm -e "roslaunch rtab_dumpster spawn_rtab_dumpster.launch odometryTopic:=odom_perfect" &
24 | #xterm -e "roslaunch udacity_bot spawn_udacity_bot.launch odometryTopic:=odom_perfect" &
25 | sleep 4
26 |
27 | # Start noisy odometry node
28 | xterm -e "roslaunch noisy_odometry noisy_odometry.launch" &
29 | sleep 4
30 |
31 | elif [ "$input_choice_1" = "n" ]
32 | then
33 | # Load robot description to parameter server and spawn a robot
34 | xterm -e "roslaunch rtab_dumpster spawn_rtab_dumpster.launch" &
35 | sleep 4
36 | echo ""
37 | else
38 | echo ""
39 | echo "Warning: Not an acceptable option. Do you want to start a noisy odometry node? Choose (y/n)"
40 | echo ""
41 | fi
42 |
43 | # Kick off static transform broadcaster node
44 | xterm -e "roslaunch apriltag_robot_pose static_transforms.launch" &
45 | sleep 2
46 |
47 | # Launch AprilTag detector node to detect AR markers in space
48 | xterm -e "roslaunch apriltag_robot_pose apriltag_detector.launch image_topic:=/camera/rgb/image_raw info_topic:=/camera/rgb/camera_info" &
49 | sleep 4
50 |
51 | # Execute the robot pose estimator node.
52 | xterm -hold -e "roslaunch apriltag_robot_pose robot_pose.launch camera_frame:=/camera_rgbd_frame" &
53 | sleep 2
54 |
55 | # Allow for Rviz choice
56 | echo ""
57 | read -p "Do you want to start RVIZ with a preconfigured view (y/n): " input_choice_2
58 |
59 | if [ "$input_choice_2" = "y" ]
60 | then
61 | # Start RVIZ
62 | xterm -e "roslaunch apriltag_robot_pose rviz.launch" &
63 | sleep 4
64 | # Load pre-made map using map server
65 | xterm -e "roslaunch plywood_mazes map_server_maze_3.launch" &
66 | echo ""
67 | elif [ "$input_choice_2" = "n" ]
68 | then
69 | echo ""
70 | echo "Rviz *NOT* started!"
71 | echo ""
72 | else
73 | echo ""
74 | echo "Warning: Not an acceptable option. Choose (y/n)"
75 | echo ""
76 | fi
77 | # Prompt for a key press to continue..
78 | echo "Press any key to return to the shell prompt or"
79 | read -n 1 -r -s -p "Ctrl+C to close all X-Term processes..."
80 | echo ""
81 |
--------------------------------------------------------------------------------
/package.xml:
--------------------------------------------------------------------------------
1 |
2 |
3 | apriltag_robot_pose
4 | 0.0.0
5 | The apriltag_robot_pose package
6 |
7 |
8 |
9 |
10 | robond
11 |
12 |
13 |
14 |
15 |
16 | TODO
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
42 |
43 |
44 |
45 |
46 |
47 |
48 |
49 |
50 |
51 | catkin
52 | rospy
53 | tf
54 | rospy
55 | tf
56 | rospy
57 | tf
58 |
59 |
60 |
61 |
62 |
63 |
64 |
65 |
66 |
--------------------------------------------------------------------------------
/config/dwa_local_planner_params.yaml:
--------------------------------------------------------------------------------
1 | # For full documentation of the parameters in this file, and a list of all the
2 | # parameters available for DWAPlannerROS, please see
3 | # http://www.ros.org/wiki/dwa_local_planner
4 |
5 | # move_base parameters
6 | controller_frequency: 3.0 # rate at which move_base will be called in Hz (default: 20.0)
7 | planner_frequency: 0.5 # rate at which re-calculate the global path, in Hz (default: 0.0
8 |
9 | DWAPlannerROS:
10 | holonomic_robot: false
11 |
12 | # Robot Configuration Parameters, set the phisical limits of the robot
13 | acc_lim_x: 1.0
14 | acc_lim_y: 0.0 # diff drive robot
15 | acc_lim_theta: 2.0
16 |
17 | max_vel_x: 0.3 # max fwd velocity allowed for the base in mt/s
18 | min_vel_x: -0.3 # min velocity allowed, set to something negative to allow the planner to generate reverse trajectories
19 | max_vel_y: 0.0 # diff drive robot
20 | min_vel_y: 0.0 # diff drive robot
21 |
22 | max_trans_vel: 0.45 # The absolute value of the maximum translational velocity for the robot in m/s
23 | min_trans_vel: 0.1 # The absolute value of the minimum translational velocity for the robot in m/s
24 | # Warning!
25 | # do not set min_trans_vel to 0.0 otherwise dwa will always think translational velocities
26 | # are non-negligible and small in place rotational velocities will be created
27 |
28 | max_rot_vel: 1.0
29 | min_rot_vel: 0.4
30 |
31 | # Forward Simulation Parameters, configure how long and with what granularity to forward simulate trajectories
32 | sim_time: 3.5 # The amount of time to forward-simulate trajectories in seconds
33 | sim_granularity: 0.025 # The step size, in meters, to take between points on a given trajectory
34 |
35 | vx_samples: 20 # The number of samples to use when exploring the x velocity space (default: 3)
36 | vy_samples: 1 # diff drive robot, there is only one sample
37 | vtheta_samples: 20
38 |
39 | # Trajectory Scoring Parameters
40 | path_distance_bias: 3.0 # 32.0 - weighting for how much it should stick to the global path plan
41 | goal_distance_bias: 1.0 # 24.0 - wighting for how much it should attempt to reach its goal
42 | occdist_scale: 0.2 # 0.01 - weighting for how much the controller should avoid obstacles
43 | forward_point_distance: 0.325 # 0.325 - how far along to place an additional scoring point
44 | stop_time_buffer: 0.2 # 0.2 - amount of time a robot must stop in before colliding for a valid traj.
45 | scaling_speed: 0.25 # 0.25 - absolute velocity at which to start scaling the robot's footprint
46 | max_scaling_factor: 0.2 # 0.2 - how much to scale the robot's footprint when at speed
47 |
48 | # Oscillation Prevention Parameters
49 | oscillation_reset_dist: 0.05 # how far to travel before resetting oscillation flags
50 |
51 | # Goal Tolerance Parameters
52 | xy_goal_tolerance: 0.3
53 | yaw_goal_tolerance: 0.2617993878 # 15 deg
54 | latch_xy_goal_tolerance: true # if the goal position is reached it is considered permanently
55 |
56 | rot_stopped_vel: 0.01
57 | trans_stopped_vel: 0.01
58 |
59 | #Global Plan Parameters
60 | prune_plan: true # Eat up the plan as the robot moves along it
61 |
62 | # Debugging
63 | publish_traj_pc : true
64 | publish_cost_grid_pc: false
65 |
66 |
--------------------------------------------------------------------------------
/start_nav_demo.sh:
--------------------------------------------------------------------------------
1 | #!/bin/bash
2 |
3 | echo ""
4 | echo "ROS AR Tag Robot Pose Estimator Demo"
5 | echo ""
6 | # The -e option to xterm is useful for running a single command and then exiting (or closing xterm after a Ctrl+C)
7 |
8 | # Fire up Gazebo world with maze environment
9 | xterm -e "roslaunch plywood_mazes maze_3_6x6.launch" &
10 | sleep 6
11 |
12 | # Prompt for a key press to continue after Gazebo has loaded
13 | #read -n 1 -r -s -p "Press any key to continue once Gazebo has loaded or Ctrl+C to abort..."
14 | #echo ""
15 |
16 | # Allow for noisy odometry choice
17 | echo ""
18 | read -p "After Gazebo has loaded, do you want to start a noisy odometry node? (y/n): " input_choice_1
19 |
20 | if [ "$input_choice_1" = "y" ]
21 | then
22 | # Load robot description to parameter server and spawn a robot
23 | #xterm -e "roslaunch rtab_dumpster spawn_rtab_dumpster.launch odometryTopic:=odom_perfect" &
24 | xterm -e "roslaunch udacity_bot spawn_udacity_bot.launch odometryTopic:=odom_perfect add_laser_sensor:=false" &
25 | sleep 4
26 |
27 | # Start noisy odometry node
28 | xterm -e "roslaunch noisy_odometry noisy_odometry.launch" &
29 | sleep 4
30 |
31 | elif [ "$input_choice_1" = "n" ]
32 | then
33 | # Load robot description to parameter server and spawn a robot
34 | #xterm -e "roslaunch rtab_dumpster spawn_rtab_dumpster.launch" &
35 | xterm -e "roslaunch udacity_bot spawn_udacity_bot.launch add_laser_sensor:=false" &
36 | sleep 4
37 | echo ""
38 | else
39 | echo ""
40 | echo "Warning: Not an acceptable option. Do you want to start a noisy odometry node? Choose (y/n)"
41 | echo ""
42 | fi
43 |
44 | # Kick off static transform broadcaster node
45 | xterm -e "roslaunch apriltag_robot_pose static_transforms.launch" &
46 | sleep 2
47 |
48 | # Launch AprilTag detector node to detect AR markers in space
49 | #xterm -e "roslaunch apriltag_robot_pose apriltag_detector.launch image_topic:=/camera/rgb/image_raw info_topic:=/camera/rgb/camera_info" &
50 | xterm -e "roslaunch apriltag_robot_pose apriltag_detector.launch image_topic:=/udacity_bot/camera1/image_raw info_topic:=/udacity_bot/camera1/image_raw" &
51 | sleep 4
52 |
53 | # Execute the robot pose estimator node.
54 | #xterm -hold -e "roslaunch apriltag_robot_pose robot_pose.launch camera_frame:=/camera_rgbd_frame" &
55 | xterm -hold -e "roslaunch apriltag_robot_pose robot_pose.launch camera_frame:=/camera_tf_frame" &
56 | sleep 2
57 |
58 | # Run move_base (nav_stack)
59 | xterm -hold -e "roslaunch apriltag_robot_pose move_base.launch" &
60 | sleep 2
61 |
62 | # Allow for Rviz choice
63 | echo ""
64 | read -p "Do you want to start RVIZ with a preconfigured view (y/n): " input_choice_2
65 |
66 | if [ "$input_choice_2" = "y" ]
67 | then
68 | # Start RVIZ
69 | xterm -e "roslaunch apriltag_robot_pose rviz.launch rviz_config_file:=ar_tag_navigation.rviz" &
70 | sleep 4
71 | # Load pre-made map using map server
72 | xterm -e "roslaunch plywood_mazes map_server_maze_3.launch" &
73 | echo ""
74 | elif [ "$input_choice_2" = "n" ]
75 | then
76 | echo ""
77 | echo "Rviz *NOT* started!"
78 | echo ""
79 | else
80 | echo ""
81 | echo "Warning: Not an acceptable option. Choose (y/n)"
82 | echo ""
83 | fi
84 | # Prompt for a key press to continue..
85 | echo "Press any key to return to the shell prompt or"
86 | read -n 1 -r -s -p "Ctrl+C to close all X-Term processes..."
87 | echo ""
88 |
--------------------------------------------------------------------------------
/config/tag_poses_maze_3.yaml:
--------------------------------------------------------------------------------
1 | # Dictionary with tag poses: [x, y, z, Roll, Pitch, Yaw] (meters, radians)
2 |
3 | tag_info:
4 | 0: [-2.5, -2.489, 0.3, 1.5708, 0, 3.14159]
5 | 1: [-1.5, -2.489, 0.3, 1.5708, 0, 3.14159]
6 | 2: [-0.5, -2.489, 0.3, 1.5708, 0, 3.14159]
7 | 3: [0.5, -2.489, 0.3, 1.5708, 0, 3.14159]
8 | 4: [1.5, -2.489, 0.3, 1.5708, 0, 3.14159]
9 | 5: [2.5, -2.489, 0.3, 1.5708, 0, 3.14159]
10 | 16: [0.5, -1.489, 0.3, 1.5708, 0, 3.14159]
11 | 17: [0.5, -1.511, 0.3, 1.5708, 0, 0]
12 | 18: [1.5, -1.489, 0.3, 1.5708, 0, 3.14159]
13 | 19: [1.5, -1.511, 0.3, 1.5708, 0, 0]
14 | 30: [-2.5, -0.489, 0.3, 1.5708, 0, 3.14159]
15 | 31: [-2.5, -0.511, 0.3, 1.5708, 0, 0]
16 | 32: [-1.5, -0.489, 0.3, 1.5708, 0, 3.14159]
17 | 33: [-1.5, -0.511, 0.3, 1.5708, 0, 0]
18 | 54: [-0.5, 0.511, 0.3, 1.5708, 0, 3.14159]
19 | 55: [-0.5, 0.489, 0.3, 1.5708, 0, 0]
20 | 58: [1.5, 0.511, 0.3, 1.5708, 0, 3.14159]
21 | 59: [1.5, 0.489, 0.3, 1.5708, 0, 0]
22 | 60: [2.5, 0.511, 0.3, 1.5708, 0, 3.14159]
23 | 61: [2.5, 0.489, 0.3, 1.5708, 0, 0]
24 | 76: [0.5, 1.511, 0.3, 1.5708, 0, 3.14159]
25 | 77: [0.5, 1.489, 0.3, 1.5708, 0, 0]
26 | 78: [1.5, 1.511, 0.3, 1.5708, 0, 3.14159]
27 | 79: [1.5, 1.489, 0.3, 1.5708, 0, 0]
28 | 92: [-1.5, 2.511, 0.3, 1.5708, 0, 3.14159]
29 | 93: [-1.5, 2.489, 0.3, 1.5708, 0, 0]
30 | 94: [-0.5, 2.511, 0.3, 1.5708, 0, 3.14159]
31 | 95: [-0.5, 2.489, 0.3, 1.5708, 0, 0]
32 | 96: [0.5, 2.511, 0.3, 1.5708, 0, 3.14159]
33 | 97: [0.5, 2.489, 0.3, 1.5708, 0, 0]
34 | 111: [-2.5, 3.489, 0.3, 1.5708, 0, 0]
35 | 113: [-1.5, 3.489, 0.3, 1.5708, 0, 0]
36 | 115: [-0.5, 3.489, 0.3, 1.5708, 0, 0]
37 | 117: [0.5, 3.489, 0.3, 1.5708, 0, 0]
38 | 119: [1.5, 3.489, 0.3, 1.5708, 0, 0]
39 | 121: [2.5, 3.489, 0.3, 1.5708, 0, 0]
40 | 300: [-2.989, -2, 0.3, 1.5708, 0, 1.5708]
41 | 301: [-2.989, -1, 0.3, 1.5708, 0, 1.5708]
42 | 302: [-2.989, 0, 0.3, 1.5708, 0, 1.5708]
43 | 303: [-2.989, 1, 0.3, 1.5708, 0, 1.5708]
44 | 304: [-2.989, 2, 0.3, 1.5708, 0, 1.5708]
45 | 305: [-2.989, 3, 0.3, 1.5708, 0, 1.5708]
46 | 310: [-1.989, -2, 0.3, 1.5708, 0, 1.5708]
47 | 311: [-2.011, -2, 0.3, 1.5708, 0, -1.5708]
48 | 314: [-1.989, 0, 0.3, 1.5708, 0, 1.5708]
49 | 315: [-2.011, 0, 0.3, 1.5708, 0, -1.5708]
50 | 316: [-1.989, 1, 0.3, 1.5708, 0, 1.5708]
51 | 317: [-2.011, 1, 0.3, 1.5708, 0, -1.5708]
52 | 332: [-0.989, -1, 0.3, 1.5708, 0, 1.5708]
53 | 333: [-1.011, -1, 0.3, 1.5708, 0, -1.5708]
54 | 336: [-0.989, 1, 0.3, 1.5708, 0, 1.5708]
55 | 337: [-1.011, 1, 0.3, 1.5708, 0, -1.5708]
56 | 338: [-0.989, 2, 0.3, 1.5708, 0, 1.5708]
57 | 339: [-1.011, 2, 0.3, 1.5708, 0, -1.5708]
58 | 350: [0.011, -2, 0.3, 1.5708, 0, 1.5708]
59 | 351: [-0.011, -2, 0.3, 1.5708, 0, -1.5708]
60 | 352: [0.011, -1, 0.3, 1.5708, 0, 1.5708]
61 | 353: [-0.011, -1, 0.3, 1.5708, 0, -1.5708]
62 | 374: [1.011, 0, 0.3, 1.5708, 0, 1.5708]
63 | 375: [0.989, 0, 0.3, 1.5708, 0, -1.5708]
64 | 394: [2.011, 0, 0.3, 1.5708, 0, 1.5708]
65 | 395: [1.989, 0, 0.3, 1.5708, 0, -1.5708]
66 | 398: [2.011, 2, 0.3, 1.5708, 0, 1.5708]
67 | 399: [1.989, 2, 0.3, 1.5708, 0, -1.5708]
68 | 400: [2.011, 3, 0.3, 1.5708, 0, 1.5708]
69 | 401: [1.989, 3, 0.3, 1.5708, 0, -1.5708]
70 | 411: [2.989, -2, 0.3, 1.5708, 0, -1.5708]
71 | 413: [2.989, -1, 0.3, 1.5708, 0, -1.5708]
72 | 415: [2.989, 0, 0.3, 1.5708, 0, -1.5708]
73 | 417: [2.989, 1, 0.3, 1.5708, 0, -1.5708]
74 | 419: [2.989, 2, 0.3, 1.5708, 0, -1.5708]
75 | 421: [2.989, 3, 0.3, 1.5708, 0, -1.5708]
76 |
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 |  2 |
3 | ## AprilTag Robot Pose
4 | Author: Roberto Zegers R.
5 |
6 | This ROS package implements a robot localization system using AprilTag markers. The tags used correspond to the family tag36h11, which has 587 different tags.
7 |
8 | ## Dependencies
9 | Packages on which this package depends:
10 | + [apriltags_ros](https://github.com/RIVeR-Lab/apriltags_ros)
11 | + [map_server](http://wiki.ros.org/map_server)
12 |
13 | ## Install
14 |
15 | First install AprilTag and its ROS wrapper by cloning the next repository into the /src directory of your catkin_workspace:
16 | `$ git clone https://github.com/RIVeR-Lab/apriltags_ros.git`
17 |
18 | Then clone this repository:
19 | `$ git clone https://github.com/rfzeg/apriltag_robot_pose.git`
20 |
21 | Compile the package with `catkin_make` and source your workspace.
22 |
23 | **Note:**
24 | The package requires to spawn a robot that publishes camera images into ROS. The standard for cameras on ROS is to publish to topics such as:
25 | + /image_raw - an unmodified camera image
26 | + /camera_info - information about the camera calibration
27 |
28 | ## Run
29 |
30 | Start all neccesary components by executing the included bash script (xterm required):
31 | `./start_demo.sh`
32 |
33 | Or alternatively start the demo launching every node manually:
34 |
35 | 1. **Fire up Gazebo world that includes AprilTag markers, e.g.:**
36 | `roslaunch plywood_mazes maze_3_6x6.launch`
37 | 2. **In a new terminal load a robot URDF file to the parameter server, e.g.:**
38 | `$ roslaunch udacity_bot robot_description.launch`
39 | 3. **And spawn the robot model, e.g.:**
40 | `$ roslaunch udacity_bot spawn_udacity_bot.launch`
41 | 4. **Launch the noisy_odom node:**
42 | `$ rosrun apriltag_robot_pose noisy_odom.py`
43 | 5. **In a new window kick off the static transform broadcaster node:**
44 | `$ roslaunch apriltag_robot_pose static_transforms.launch`
45 | 6. **Then launch the AprilTag detector node to detect AR markers in the camera image:**
46 | `$ roslaunch apriltag_robot_pose apriltag_detector.launch`
47 | 7. **Next execute the robot pose estimator node:**
48 | `$ rosrun apriltag_robot_pose robot_pose.py`
49 | 8. **In order to see the robot pose estimator node in action open RViz:**
50 | `$ roslaunch apriltag_robot_pose rviz.launch`
51 | 9. **Launch the map_server node to see the map in RViz, e.g.:**
52 | `$ roslaunch plywood_mazes map_server_maze_3.launch`
53 |
54 | If you want to manually control the robot, open a new terminal window and run:
55 | `$ rosrun rqt_robot_steering rqt_robot_steering`
56 |
57 | ## Optional Checks
58 |
59 | On a new terminal run this command to see the existing topics:
60 | `$ rostopic list`
61 |
62 | If everything is correct, a list of topics published by the apriltag detector node should appear:
63 |
2 |
3 | ## AprilTag Robot Pose
4 | Author: Roberto Zegers R.
5 |
6 | This ROS package implements a robot localization system using AprilTag markers. The tags used correspond to the family tag36h11, which has 587 different tags.
7 |
8 | ## Dependencies
9 | Packages on which this package depends:
10 | + [apriltags_ros](https://github.com/RIVeR-Lab/apriltags_ros)
11 | + [map_server](http://wiki.ros.org/map_server)
12 |
13 | ## Install
14 |
15 | First install AprilTag and its ROS wrapper by cloning the next repository into the /src directory of your catkin_workspace:
16 | `$ git clone https://github.com/RIVeR-Lab/apriltags_ros.git`
17 |
18 | Then clone this repository:
19 | `$ git clone https://github.com/rfzeg/apriltag_robot_pose.git`
20 |
21 | Compile the package with `catkin_make` and source your workspace.
22 |
23 | **Note:**
24 | The package requires to spawn a robot that publishes camera images into ROS. The standard for cameras on ROS is to publish to topics such as:
25 | + /image_raw - an unmodified camera image
26 | + /camera_info - information about the camera calibration
27 |
28 | ## Run
29 |
30 | Start all neccesary components by executing the included bash script (xterm required):
31 | `./start_demo.sh`
32 |
33 | Or alternatively start the demo launching every node manually:
34 |
35 | 1. **Fire up Gazebo world that includes AprilTag markers, e.g.:**
36 | `roslaunch plywood_mazes maze_3_6x6.launch`
37 | 2. **In a new terminal load a robot URDF file to the parameter server, e.g.:**
38 | `$ roslaunch udacity_bot robot_description.launch`
39 | 3. **And spawn the robot model, e.g.:**
40 | `$ roslaunch udacity_bot spawn_udacity_bot.launch`
41 | 4. **Launch the noisy_odom node:**
42 | `$ rosrun apriltag_robot_pose noisy_odom.py`
43 | 5. **In a new window kick off the static transform broadcaster node:**
44 | `$ roslaunch apriltag_robot_pose static_transforms.launch`
45 | 6. **Then launch the AprilTag detector node to detect AR markers in the camera image:**
46 | `$ roslaunch apriltag_robot_pose apriltag_detector.launch`
47 | 7. **Next execute the robot pose estimator node:**
48 | `$ rosrun apriltag_robot_pose robot_pose.py`
49 | 8. **In order to see the robot pose estimator node in action open RViz:**
50 | `$ roslaunch apriltag_robot_pose rviz.launch`
51 | 9. **Launch the map_server node to see the map in RViz, e.g.:**
52 | `$ roslaunch plywood_mazes map_server_maze_3.launch`
53 |
54 | If you want to manually control the robot, open a new terminal window and run:
55 | `$ rosrun rqt_robot_steering rqt_robot_steering`
56 |
57 | ## Optional Checks
58 |
59 | On a new terminal run this command to see the existing topics:
60 | `$ rostopic list`
61 |
62 | If everything is correct, a list of topics published by the apriltag detector node should appear:
63 | 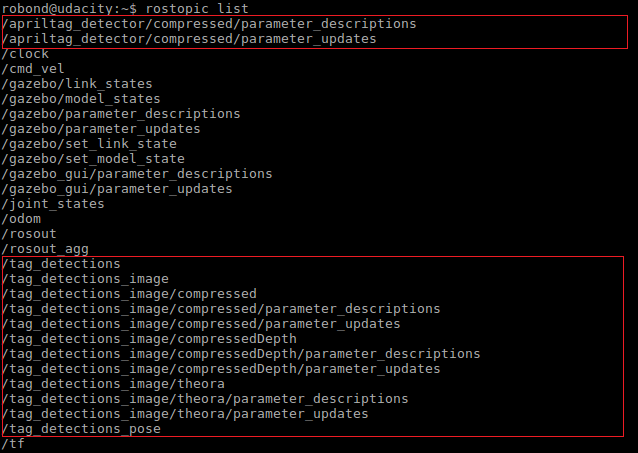 64 | Fig.1 The available topics shown by using the **rostopic list** command
65 |
66 | Then check that AprilTags are being detected by placing the robot's camera in front of a tag and running:
67 |
68 | `$ rostopic echo /tag_detections`
69 |
70 |
64 | Fig.1 The available topics shown by using the **rostopic list** command
65 |
66 | Then check that AprilTags are being detected by placing the robot's camera in front of a tag and running:
67 |
68 | `$ rostopic echo /tag_detections`
69 |
70 |  71 | Fig.2 When a tag is detected values similar to these are displayed when running the **rostopic echo** command
72 |
73 | To view raw images, for instance on the topic /udacity_bot/camera1/image\_raw, use:
74 | `$ rosrun image_view image_view image:=/udacity_bot/camera1/image_raw`
75 |
71 | Fig.2 When a tag is detected values similar to these are displayed when running the **rostopic echo** command
72 |
73 | To view raw images, for instance on the topic /udacity_bot/camera1/image\_raw, use:
74 | `$ rosrun image_view image_view image:=/udacity_bot/camera1/image_raw`
75 | 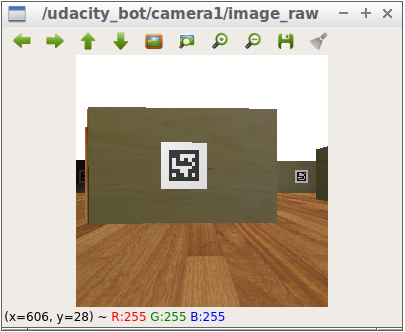 76 |
77 | To check that the parameters defined in the tag\_sizes.yaml file were loaded into the param server type:
78 | `$ rosparam get /apriltag_detector/tag_descriptions`
79 |
80 | To look at the numeric values of a transform between the map frame and any specific AR marker tag:
81 | `$ rosrun tf tf_echo map tag_0`
82 | or visualize the complete tf tree using RQT:
83 | `$ rosrun rqt_tf_tree rqt_tf_tree`
84 |
85 | If you would like the apriltag_robot_pose node to display output at the DEBUG verbosity level use:
86 | `$ rosservice call /apriltag_robot_pose/set_logger_level "{logger: 'rosout', level: 'debug'}"`
87 |
88 | ## Troubleshooting
89 | + Gazebo is crashing as it is starting up: Usually, it is enough to run it again (probably several times).
90 | + ImportError No module named apriltags.msg: When using custom messages, make sure the packages containing them have been compiled.
91 | + ERROR: cannot launch node of type [map_server/map_server]: map_server
92 | You have to install map_server first: `$ sudo apt install ros-kinetic-map-server`
93 |
94 | This package has only been tested on Ubuntu 16.04 LTS with ROS Kinetic and Gazebo 7.15.
95 |
96 | ## Further Improvements
97 | + Averaging quaternions is not straightforward. At the moment the robot's estimated orientation, when several AR markers are detected, is the orientation of the first detected marker.
98 | One could do a SLERP to average two quaternions from two (closest) detected markers for a better robot's orientation estimation. See: https://github.com/danielduberg/safe_flight/issues/1
99 |
100 | ## Resources
101 | + http://wiki.ros.org/tf2/Tutorials/Writing%20a%20tf2%20broadcaster%20%28Python%29
102 | + The general relationship between the map, odom and base\_link frames is already described in [Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html).
103 | + [Average of Quaternions](https://stackoverflow.com/questions/12374087/average-of-multiple-quaternions/)
104 | + https://github.com/lucien386/DJISummerCamp2019/blob/master/ROS_Ws/src/sc_localization/odom_update_node.cpp
105 |
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 2.8.3)
2 | project(apriltag_robot_pose)
3 |
4 | ## Compile as C++11, supported in ROS Kinetic and newer
5 | # add_compile_options(-std=c++11)
6 |
7 | ## Find catkin macros and libraries
8 | ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
9 | ## is used, also find other catkin packages
10 | find_package(catkin REQUIRED COMPONENTS
11 | rospy
12 | tf
13 | )
14 |
15 | ## System dependencies are found with CMake's conventions
16 | # find_package(Boost REQUIRED COMPONENTS system)
17 |
18 |
19 | ## Uncomment this if the package has a setup.py. This macro ensures
20 | ## modules and global scripts declared therein get installed
21 | ## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
22 | # catkin_python_setup()
23 |
24 | ################################################
25 | ## Declare ROS messages, services and actions ##
26 | ################################################
27 |
28 | ## To declare and build messages, services or actions from within this
29 | ## package, follow these steps:
30 | ## * Let MSG_DEP_SET be the set of packages whose message types you use in
31 | ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
32 | ## * In the file package.xml:
33 | ## * add a build_depend tag for "message_generation"
34 | ## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
35 | ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
36 | ## but can be declared for certainty nonetheless:
37 | ## * add a exec_depend tag for "message_runtime"
38 | ## * In this file (CMakeLists.txt):
39 | ## * add "message_generation" and every package in MSG_DEP_SET to
40 | ## find_package(catkin REQUIRED COMPONENTS ...)
41 | ## * add "message_runtime" and every package in MSG_DEP_SET to
42 | ## catkin_package(CATKIN_DEPENDS ...)
43 | ## * uncomment the add_*_files sections below as needed
44 | ## and list every .msg/.srv/.action file to be processed
45 | ## * uncomment the generate_messages entry below
46 | ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
47 |
48 | ## Generate messages in the 'msg' folder
49 | # add_message_files(
50 | # FILES
51 | # Message1.msg
52 | # Message2.msg
53 | # )
54 |
55 | ## Generate services in the 'srv' folder
56 | # add_service_files(
57 | # FILES
58 | # Service1.srv
59 | # Service2.srv
60 | # )
61 |
62 | ## Generate actions in the 'action' folder
63 | # add_action_files(
64 | # FILES
65 | # Action1.action
66 | # Action2.action
67 | # )
68 |
69 | ## Generate added messages and services with any dependencies listed here
70 | # generate_messages(
71 | # DEPENDENCIES
72 | # std_msgs # Or other packages containing msgs
73 | # )
74 |
75 | ################################################
76 | ## Declare ROS dynamic reconfigure parameters ##
77 | ################################################
78 |
79 | ## To declare and build dynamic reconfigure parameters within this
80 | ## package, follow these steps:
81 | ## * In the file package.xml:
82 | ## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
83 | ## * In this file (CMakeLists.txt):
84 | ## * add "dynamic_reconfigure" to
85 | ## find_package(catkin REQUIRED COMPONENTS ...)
86 | ## * uncomment the "generate_dynamic_reconfigure_options" section below
87 | ## and list every .cfg file to be processed
88 |
89 | ## Generate dynamic reconfigure parameters in the 'cfg' folder
90 | # generate_dynamic_reconfigure_options(
91 | # cfg/DynReconf1.cfg
92 | # cfg/DynReconf2.cfg
93 | # )
94 |
95 | ###################################
96 | ## catkin specific configuration ##
97 | ###################################
98 | ## The catkin_package macro generates cmake config files for your package
99 | ## Declare things to be passed to dependent projects
100 | ## INCLUDE_DIRS: uncomment this if your package contains header files
101 | ## LIBRARIES: libraries you create in this project that dependent projects also need
102 | ## CATKIN_DEPENDS: catkin_packages dependent projects also need
103 | ## DEPENDS: system dependencies of this project that dependent projects also need
104 | catkin_package(
105 | # INCLUDE_DIRS include
106 | # LIBRARIES apriltag_robot_pose
107 | # CATKIN_DEPENDS rospy tf
108 | # DEPENDS system_lib
109 | )
110 |
111 | ###########
112 | ## Build ##
113 | ###########
114 |
115 | ## Specify additional locations of header files
116 | ## Your package locations should be listed before other locations
117 | include_directories(
118 | # include
119 | ${catkin_INCLUDE_DIRS}
120 | )
121 |
122 | ## Declare a C++ library
123 | # add_library(${PROJECT_NAME}
124 | # src/${PROJECT_NAME}/apriltag_robot_pose.cpp
125 | # )
126 |
127 | ## Add cmake target dependencies of the library
128 | ## as an example, code may need to be generated before libraries
129 | ## either from message generation or dynamic reconfigure
130 | # add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
131 |
132 | ## Declare a C++ executable
133 | ## With catkin_make all packages are built within a single CMake context
134 | ## The recommended prefix ensures that target names across packages don't collide
135 | # add_executable(${PROJECT_NAME}_node src/apriltag_robot_pose_node.cpp)
136 |
137 | ## Rename C++ executable without prefix
138 | ## The above recommended prefix causes long target names, the following renames the
139 | ## target back to the shorter version for ease of user use
140 | ## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
141 | # set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
142 |
143 | ## Add cmake target dependencies of the executable
144 | ## same as for the library above
145 | # add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
146 |
147 | ## Specify libraries to link a library or executable target against
148 | # target_link_libraries(${PROJECT_NAME}_node
149 | # ${catkin_LIBRARIES}
150 | # )
151 |
152 | #############
153 | ## Install ##
154 | #############
155 |
156 | # all install targets should use catkin DESTINATION variables
157 | # See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
158 |
159 | ## Mark executable scripts (Python etc.) for installation
160 | ## in contrast to setup.py, you can choose the destination
161 | # install(PROGRAMS
162 | # scripts/my_python_script
163 | # DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
164 | # )
165 |
166 | ## Mark executables and/or libraries for installation
167 | # install(TARGETS ${PROJECT_NAME} ${PROJECT_NAME}_node
168 | # ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
169 | # LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
170 | # RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
171 | # )
172 |
173 | ## Mark cpp header files for installation
174 | # install(DIRECTORY include/${PROJECT_NAME}/
175 | # DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
176 | # FILES_MATCHING PATTERN "*.h"
177 | # PATTERN ".svn" EXCLUDE
178 | # )
179 |
180 | ## Mark other files for installation (e.g. launch and bag files, etc.)
181 | # install(FILES
182 | # # myfile1
183 | # # myfile2
184 | # DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
185 | # )
186 |
187 | #############
188 | ## Testing ##
189 | #############
190 |
191 | ## Add gtest based cpp test target and link libraries
192 | # catkin_add_gtest(${PROJECT_NAME}-test test/test_apriltag_robot_pose.cpp)
193 | # if(TARGET ${PROJECT_NAME}-test)
194 | # target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
195 | # endif()
196 |
197 | ## Add folders to be run by python nosetests
198 | # catkin_add_nosetests(test)
199 |
--------------------------------------------------------------------------------
/config/robot_pose.rviz:
--------------------------------------------------------------------------------
1 | Panels:
2 | - Class: rviz/Displays
3 | Help Height: 78
4 | Name: Displays
5 | Property Tree Widget:
6 | Expanded:
7 | - /Global Options1
8 | - /Status1
9 | Splitter Ratio: 0.5
10 | Tree Height: 743
11 | - Class: rviz/Selection
12 | Name: Selection
13 | - Class: rviz/Tool Properties
14 | Expanded:
15 | - /2D Pose Estimate1
16 | - /2D Nav Goal1
17 | - /Publish Point1
18 | Name: Tool Properties
19 | Splitter Ratio: 0.588679016
20 | - Class: rviz/Views
21 | Expanded:
22 | - /Current View1
23 | Name: Views
24 | Splitter Ratio: 0.5
25 | - Class: rviz/Time
26 | Experimental: false
27 | Name: Time
28 | SyncMode: 0
29 | SyncSource: ""
30 | Toolbars:
31 | toolButtonStyle: 2
32 | Visualization Manager:
33 | Class: ""
34 | Displays:
35 | - Alpha: 0.5
36 | Cell Size: 1
37 | Class: rviz/Grid
38 | Color: 160; 160; 164
39 | Enabled: true
40 | Line Style:
41 | Line Width: 0.0299999993
42 | Value: Lines
43 | Name: Grid
44 | Normal Cell Count: 0
45 | Offset:
46 | X: 0
47 | Y: 0
48 | Z: 0
49 | Plane: XY
50 | Plane Cell Count: 10
51 | Reference Frame:
52 | Value: true
53 | - Class: rviz/TF
54 | Enabled: true
55 | Frame Timeout: 15
56 | Frames:
57 | All Enabled: true
58 | camera:
59 | Value: true
60 | chassis:
61 | Value: true
62 | hokuyo:
63 | Value: true
64 | left_wheel:
65 | Value: true
66 | map:
67 | Value: true
68 | odom:
69 | Value: true
70 | right_wheel:
71 | Value: true
72 | robot_footprint:
73 | Value: true
74 | tag_0:
75 | Value: true
76 | tag_1:
77 | Value: true
78 | tag_111:
79 | Value: true
80 | tag_113:
81 | Value: true
82 | tag_115:
83 | Value: true
84 | tag_117:
85 | Value: true
86 | tag_119:
87 | Value: true
88 | tag_121:
89 | Value: true
90 | tag_16:
91 | Value: true
92 | tag_17:
93 | Value: true
94 | tag_18:
95 | Value: true
96 | tag_19:
97 | Value: true
98 | tag_2:
99 | Value: true
100 | tag_3:
101 | Value: true
102 | tag_30:
103 | Value: true
104 | tag_300:
105 | Value: true
106 | tag_301:
107 | Value: true
108 | tag_302:
109 | Value: true
110 | tag_303:
111 | Value: true
112 | tag_304:
113 | Value: true
114 | tag_305:
115 | Value: true
116 | tag_31:
117 | Value: true
118 | tag_310:
119 | Value: true
120 | tag_311:
121 | Value: true
122 | tag_314:
123 | Value: true
124 | tag_315:
125 | Value: true
126 | tag_316:
127 | Value: true
128 | tag_317:
129 | Value: true
130 | tag_32:
131 | Value: true
132 | tag_33:
133 | Value: true
134 | tag_332:
135 | Value: true
136 | tag_333:
137 | Value: true
138 | tag_336:
139 | Value: true
140 | tag_337:
141 | Value: true
142 | tag_338:
143 | Value: true
144 | tag_339:
145 | Value: true
146 | tag_350:
147 | Value: true
148 | tag_351:
149 | Value: true
150 | tag_352:
151 | Value: true
152 | tag_353:
153 | Value: true
154 | tag_374:
155 | Value: true
156 | tag_375:
157 | Value: true
158 | tag_394:
159 | Value: true
160 | tag_395:
161 | Value: true
162 | tag_398:
163 | Value: true
164 | tag_399:
165 | Value: true
166 | tag_4:
167 | Value: true
168 | tag_400:
169 | Value: true
170 | tag_401:
171 | Value: true
172 | tag_411:
173 | Value: true
174 | tag_413:
175 | Value: true
176 | tag_415:
177 | Value: true
178 | tag_417:
179 | Value: true
180 | tag_419:
181 | Value: true
182 | tag_421:
183 | Value: true
184 | tag_5:
185 | Value: true
186 | tag_54:
187 | Value: true
188 | tag_55:
189 | Value: true
190 | tag_58:
191 | Value: true
192 | tag_59:
193 | Value: true
194 | tag_60:
195 | Value: true
196 | tag_61:
197 | Value: true
198 | tag_76:
199 | Value: true
200 | tag_77:
201 | Value: true
202 | tag_78:
203 | Value: true
204 | tag_79:
205 | Value: true
206 | tag_92:
207 | Value: true
208 | tag_93:
209 | Value: true
210 | tag_94:
211 | Value: true
212 | tag_95:
213 | Value: true
214 | tag_96:
215 | Value: true
216 | tag_97:
217 | Value: true
218 | Marker Scale: 1
219 | Name: TF
220 | Show Arrows: true
221 | Show Axes: true
222 | Show Names: true
223 | Tree:
224 | map:
225 | odom:
226 | robot_footprint:
227 | chassis:
228 | camera:
229 | {}
230 | hokuyo:
231 | {}
232 | left_wheel:
233 | {}
234 | right_wheel:
235 | {}
236 | tag_0:
237 | {}
238 | tag_1:
239 | {}
240 | tag_111:
241 | {}
242 | tag_113:
243 | {}
244 | tag_115:
245 | {}
246 | tag_117:
247 | {}
248 | tag_119:
249 | {}
250 | tag_121:
251 | {}
252 | tag_16:
253 | {}
254 | tag_17:
255 | {}
256 | tag_18:
257 | {}
258 | tag_19:
259 | {}
260 | tag_2:
261 | {}
262 | tag_3:
263 | {}
264 | tag_30:
265 | {}
266 | tag_300:
267 | {}
268 | tag_301:
269 | {}
270 | tag_302:
271 | {}
272 | tag_303:
273 | {}
274 | tag_304:
275 | {}
276 | tag_305:
277 | {}
278 | tag_31:
279 | {}
280 | tag_310:
281 | {}
282 | tag_311:
283 | {}
284 | tag_314:
285 | {}
286 | tag_315:
287 | {}
288 | tag_316:
289 | {}
290 | tag_317:
291 | {}
292 | tag_32:
293 | {}
294 | tag_33:
295 | {}
296 | tag_332:
297 | {}
298 | tag_333:
299 | {}
300 | tag_336:
301 | {}
302 | tag_337:
303 | {}
304 | tag_338:
305 | {}
306 | tag_339:
307 | {}
308 | tag_350:
309 | {}
310 | tag_351:
311 | {}
312 | tag_352:
313 | {}
314 | tag_353:
315 | {}
316 | tag_374:
317 | {}
318 | tag_375:
319 | {}
320 | tag_394:
321 | {}
322 | tag_395:
323 | {}
324 | tag_398:
325 | {}
326 | tag_399:
327 | {}
328 | tag_4:
329 | {}
330 | tag_400:
331 | {}
332 | tag_401:
333 | {}
334 | tag_411:
335 | {}
336 | tag_413:
337 | {}
338 | tag_415:
339 | {}
340 | tag_417:
341 | {}
342 | tag_419:
343 | {}
344 | tag_421:
345 | {}
346 | tag_5:
347 | {}
348 | tag_54:
349 | {}
350 | tag_55:
351 | {}
352 | tag_58:
353 | {}
354 | tag_59:
355 | {}
356 | tag_60:
357 | {}
358 | tag_61:
359 | {}
360 | tag_76:
361 | {}
362 | tag_77:
363 | {}
364 | tag_78:
365 | {}
366 | tag_79:
367 | {}
368 | tag_92:
369 | {}
370 | tag_93:
371 | {}
372 | tag_94:
373 | {}
374 | tag_95:
375 | {}
376 | tag_96:
377 | {}
378 | tag_97:
379 | {}
380 | Update Interval: 0
381 | Value: true
382 | - Alpha: 1
383 | Class: rviz/RobotModel
384 | Collision Enabled: false
385 | Enabled: true
386 | Links:
387 | All Links Enabled: true
388 | Expand Joint Details: false
389 | Expand Link Details: false
390 | Expand Tree: false
391 | Link Tree Style: Links in Alphabetic Order
392 | camera:
393 | Alpha: 1
394 | Show Axes: false
395 | Show Trail: false
396 | Value: true
397 | chassis:
398 | Alpha: 1
399 | Show Axes: false
400 | Show Trail: false
401 | Value: true
402 | hokuyo:
403 | Alpha: 1
404 | Show Axes: false
405 | Show Trail: false
406 | Value: true
407 | left_wheel:
408 | Alpha: 1
409 | Show Axes: false
410 | Show Trail: false
411 | Value: true
412 | right_wheel:
413 | Alpha: 1
414 | Show Axes: false
415 | Show Trail: false
416 | Value: true
417 | robot_footprint:
418 | Alpha: 1
419 | Show Axes: false
420 | Show Trail: false
421 | Name: RobotModel
422 | Robot Description: robot_description
423 | TF Prefix: ""
424 | Update Interval: 0
425 | Value: true
426 | Visual Enabled: true
427 | - Alpha: 0.699999988
428 | Class: rviz/Map
429 | Color Scheme: map
430 | Draw Behind: false
431 | Enabled: true
432 | Name: Map
433 | Topic: /map
434 | Unreliable: false
435 | Use Timestamp: false
436 | Value: true
437 | Enabled: true
438 | Global Options:
439 | Background Color: 48; 48; 48
440 | Default Light: true
441 | Fixed Frame: map
442 | Frame Rate: 30
443 | Name: root
444 | Tools:
445 | - Class: rviz/Interact
446 | Hide Inactive Objects: true
447 | - Class: rviz/MoveCamera
448 | - Class: rviz/Select
449 | - Class: rviz/FocusCamera
450 | - Class: rviz/Measure
451 | - Class: rviz/SetInitialPose
452 | Topic: /initialpose
453 | - Class: rviz/SetGoal
454 | Topic: /move_base_simple/goal
455 | - Class: rviz/PublishPoint
456 | Single click: true
457 | Topic: /clicked_point
458 | Value: true
459 | Views:
460 | Current:
461 | Class: rviz/Orbit
462 | Distance: 8.72745323
463 | Enable Stereo Rendering:
464 | Stereo Eye Separation: 0.0599999987
465 | Stereo Focal Distance: 1
466 | Swap Stereo Eyes: false
467 | Value: false
468 | Focal Point:
469 | X: 0.461928636
470 | Y: 0.215806082
471 | Z: 0.33352679
472 | Focal Shape Fixed Size: true
473 | Focal Shape Size: 0.0500000007
474 | Invert Z Axis: false
475 | Name: Current View
476 | Near Clip Distance: 0.00999999978
477 | Pitch: 0.525398076
478 | Target Frame:
479 | Value: Orbit (rviz)
480 | Yaw: 4.21358395
481 | Saved: ~
482 | Window Geometry:
483 | Displays:
484 | collapsed: false
485 | Height: 1031
486 | Hide Left Dock: false
487 | Hide Right Dock: false
488 | QMainWindow State: 000000ff00000000fd0000000400000000000001860000036ffc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003a0000036f000000c600fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f0000036ffc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003a0000036f0000009e00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d00650100000000000007800000024400fffffffb0000000800540069006d00650100000000000004500000000000000000000004df0000036f00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
489 | Selection:
490 | collapsed: false
491 | Time:
492 | collapsed: false
493 | Tool Properties:
494 | collapsed: false
495 | Views:
496 | collapsed: false
497 | Width: 1920
498 | X: 0
499 | Y: 0
500 |
--------------------------------------------------------------------------------
/scripts/robot_pose.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/python
2 |
3 | # Estimates the absolute pose a robot in a map based on the position of the AprilTag markers in the robot's camera field of view
4 | # Broadcasts the transform of odom w.r.t. map to correct odometry drift
5 | # Author: Roberto Zegers R.
6 | # Date: 2019 July
7 |
8 | import rospy
9 | from apriltags_ros.msg import AprilTagDetection, AprilTagDetectionArray
10 | from geometry_msgs.msg import Pose, PoseStamped, TransformStamped, Point, Quaternion
11 | from tf.transformations import quaternion_from_euler, euler_from_quaternion, translation_from_matrix, quaternion_from_matrix, compose_matrix, quaternion_matrix, rotation_matrix
12 | import numpy as np
13 | import tf2_ros
14 | import tf2_geometry_msgs
15 |
16 | ## Global variables
17 | nrTfRetrys = 1
18 | retryTime = 0.05
19 | rospy.init_node('apriltag_robot_pose', log_level=rospy.INFO, anonymous=False)
20 |
21 | # Initializes a tf2 listener
22 | tf_buffer = tf2_ros.Buffer(rospy.Duration(10.0)) #tf buffer length
23 | tf_listener = tf2_ros.TransformListener(tf_buffer)
24 |
25 | # Initializes a tf2 broadcaster for our map(parent)->odom(child) == odom w.r.t. map transform
26 | br_odom_wrt_map = tf2_ros.TransformBroadcaster()
27 |
28 | # Initializes an empty TransformStamped object for our map(parent)->odom(child) == odom w.r.t. map transform
29 | ts_odom_wrt_map = TransformStamped()
30 |
31 | r = rospy.Rate(10) # 10hz
32 |
33 | # Initializes an empty PoseStamped object the pose of the robot_base w.r.t map
34 | robot_pose = PoseStamped()
35 |
36 | new_translation = []
37 | new_rotation = []
38 |
39 | def strip_forward_slash(frame_id):
40 | '''
41 | Removes forward slash for tf2 to work
42 | '''
43 | if frame_id[0] == "/":
44 | new_frame_id = frame_id[1:]
45 | else:
46 | new_frame_id = frame_id
47 | return new_frame_id
48 |
49 | # get the robot's base frame
50 | if rospy.has_param("~base_frame"):
51 | # forward slash must be removed to work with tf2
52 | base_frame = strip_forward_slash(rospy.get_param("~base_frame"))
53 | else:
54 | base_frame = "base_footprint"
55 | rospy.logwarn("base_footprint frame is set to default: base_footprint")
56 |
57 | # get odom frame, the (noisy) odometry
58 | if rospy.has_param("~odom_frame"):
59 | odom_frame = strip_forward_slash(rospy.get_param("~odom_frame"))
60 | else:
61 | odom_frame = "odom"
62 | rospy.logwarn("odometry frame of reference is set to default: odom")
63 |
64 | # get world_fixed_frame
65 | if rospy.has_param("~world_fixed_frame"):
66 | world_fixed_frame = strip_forward_slash(rospy.get_param("~world_fixed_frame"))
67 | else:
68 | world_fixed_frame = "map"
69 | rospy.logwarn("world_fixed_frame frame is set to default: map")
70 |
71 | # get the camera frame
72 | if rospy.has_param("~camera_frame"):
73 | camera_frame = strip_forward_slash(rospy.get_param("~camera_frame"))
74 | else:
75 | camera_frame = "camera"
76 | rospy.logwarn("camera frame of reference is set to default: camera")
77 |
78 | def main():
79 | rospy.Subscriber("/tag_detections", AprilTagDetectionArray, apriltag_callback, queue_size = 1)
80 | rospy.loginfo("Started node to broadcast odom wrt map transform!")
81 | # get base w.r.t. odom transform
82 | while not rospy.is_shutdown():
83 | try:
84 | # Look for the odom->base_footprint transform
85 | rospy.logdebug("Looking for the odom->robot_footprint transform")
86 | ts_base_wrt_odom = tf_buffer.lookup_transform(odom_frame, base_frame, rospy.Time(), rospy.Duration(1.0)) # wait 1s for transform to become available
87 | rospy.logdebug("ts_base_wrt_odom: %s", ts_base_wrt_odom)
88 | # note: robot_pose (base_frame wrt map) is calculated every time the subscriber callback is executed
89 | broadcast_last_transform()
90 | except (tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException), ex:
91 | rospy.logerr(ex)
92 | r.sleep()
93 |
94 | def pose2poselist(pose):
95 | ''' Transforms a pose object into the form of a python list'''
96 | return [pose.pose.position.x, pose.pose.position.y, pose.pose.position.z, pose.pose.orientation.x, pose.pose.orientation.y, pose.pose.orientation.z, pose.pose.orientation.w]
97 |
98 | def transformPose(pose, sourceFrame, target_frame):
99 | '''
100 | Converts a pose represented as a list in the source_frame
101 | to a pose represented as a list in the target_frame
102 | '''
103 | _pose = PoseStamped()
104 | _pose.header.frame_id = sourceFrame
105 | if len(pose) == 6:
106 | pose.append(0)
107 | pose[3:7] = quaternion_from_euler(pose[3], pose[4], pose[5]).tolist()
108 |
109 | _pose.pose.position.x = pose[0]
110 | _pose.pose.position.y = pose[1]
111 | _pose.pose.position.z = pose[2]
112 | _pose.pose.orientation.x = pose[3]
113 | _pose.pose.orientation.y = pose[4]
114 | _pose.pose.orientation.z = pose[5]
115 | _pose.pose.orientation.w = pose[6]
116 |
117 | for i in range(nrTfRetrys):
118 | try:
119 | t = rospy.Time(0)
120 | _pose.header.stamp = t
121 | # converts a Pose object from its reference frame to a Pose object in the frame target_frame
122 | transform = tf_buffer.lookup_transform(target_frame,
123 | _pose.header.frame_id, #source frame is the current object's frame of reference
124 | rospy.Time(0), #get the tf at first available time
125 | rospy.Duration(1.0)) #wait for 1 second
126 | pose_transformed = tf2_geometry_msgs.do_transform_pose(_pose, transform)
127 | p = pose_transformed.pose.position
128 | o = pose_transformed.pose.orientation
129 | return [p.x, p.y, p.z, o.x, o.y, o.z, o.w]
130 | except (tf2_ros.LookupException), e1:
131 | print("ERROR: LookupException!")
132 | rospy.logerr(e1)
133 | rospy.logwarn("No tf frame with name %s found. Check that the detected tag ID is part of the transforms that are being broadcasted by the static transform broadcaster.", target_frame)
134 | continue
135 | except (tf2_ros.ConnectivityException), e2:
136 | rospy.logwarn(e2)
137 | rospy.logerr("ERROR: ConnectivityException!")
138 | continue
139 | except (tf2_ros.ExtrapolationException), e3:
140 | rospy.logwarn(e3)
141 | rospy.logerr("ERROR: ExtrapolationException!")
142 | continue
143 | except Exception as e4:
144 | rospy.logwarn(e4)
145 | rospy.logerr("Unexpected error when transforming Pose")
146 | finally:
147 | rospy.sleep(retryTime)
148 | return None
149 |
150 | def xyzquat_from_matrix(matrix):
151 | return translation_from_matrix(matrix).tolist() + quaternion_from_matrix(matrix).tolist()
152 |
153 | def matrix_from_xyzquat(arg1, arg2=None):
154 | return matrix_from_xyzquat_np_array(arg1, arg2).tolist()
155 |
156 | def matrix_from_xyzquat_np_array(arg1, arg2=None):
157 | if arg2 is not None:
158 | translate = arg1
159 | quaternion = arg2
160 | else:
161 | translate = arg1[0:3]
162 | quaternion = arg1[3:7]
163 |
164 | return np.dot(compose_matrix(translate=translate),quaternion_matrix(quaternion))
165 |
166 | def invPoselist(poselist):
167 | return xyzquat_from_matrix(np.linalg.inv(matrix_from_xyzquat(poselist)))
168 |
169 | def base_wrt_map_pose(pose=[0,0,0,0,0,0,1], child_frame_id='obj', parent_frame_id = world_fixed_frame, npub=1):
170 | '''
171 | Converts from a representation of a pose as a list to a TransformStamped object (translation and rotation (Quaternion) representation)
172 | Then keeps that as a TransformStamped object
173 | Note:
174 | In Rviz it will be shown as an arrow from the robot base (child) to the map (parent)
175 | In RQT it will be shown as an arrow from the map (parent) to the robot base (child)
176 | '''
177 | global robot_pose
178 | if len(pose) == 7:
179 | quaternion = tuple(pose[3:7])
180 | elif len(pose) == 6:
181 | quaternion = quaternion_from_euler(*pose[3:6])
182 | else:
183 | rospy.logerr("Bad length of pose")
184 | return None
185 |
186 | position = tuple(pose[0:3])
187 | # Fill in PoseStamped object: stamps the transform with the current time
188 | robot_pose.header.stamp = rospy.Time.now()
189 | # Sets the frame ID of the transform to the map frame
190 | robot_pose.header.frame_id = parent_frame_id
191 | # Fill in coordinates
192 | if len(pose) == 6:
193 | pose.append(0)
194 | pose[3:7] = quaternion_from_euler(pose[3], pose[4], pose[5]).tolist()
195 |
196 | robot_pose.pose.position.x = pose[0]
197 | robot_pose.pose.position.y = pose[1]
198 | robot_pose.pose.position.z = 0 # fixate the z value of the robot base to avoid that it jumps up and down, or use pose[2] for the detected value
199 | robot_pose.pose.orientation.x = pose[3]
200 | robot_pose.pose.orientation.y = pose[4]
201 | robot_pose.pose.orientation.z = pose[5]
202 | robot_pose.pose.orientation.w = pose[6]
203 |
204 | def averagePose(pose_list):
205 | '''
206 | Calculates the averge pose from a list of poses
207 | Position is the average of all estimated positions
208 | Orientation uses the orientation of the first detected marker
209 | '''
210 | avg_pose = []
211 | avg_pose.append(np.mean([pose[0] for pose in pose_list]))
212 | avg_pose.append(np.mean([pose[1] for pose in pose_list]))
213 | avg_pose.append(np.mean([pose[2] for pose in pose_list]))
214 | # Use the orientation of the first detected marker
215 | avg_pose.extend(pose_list[0][3:7])
216 | return avg_pose
217 |
218 | def apriltag_callback(data):
219 | # rospy.logdebug(rospy.get_caller_id() + "I heard %s", data)
220 | if data.detections:
221 | poselist_base_wrt_map = []
222 | for detection in data.detections:
223 | tag_id = detection.id # tag id
224 | rospy.logdebug("Tag ID detected: %s \n", tag_id)
225 | child_frame_id = "tag_" + str(tag_id)
226 |
227 | # Convert the deteced tag Pose object to tag pose representation as a list, only for convinience
228 | poselist_tag_wrt_camera = pose2poselist(detection.pose)
229 | rospy.logdebug("poselist_tag_wrt_camera: \n %s \n", poselist_tag_wrt_camera)
230 |
231 | # Calculate transform of tag w.r.t. robot base (in Rviz arrow points from tag (child) to robot base(parent))
232 | poselist_tag_wrt_base = transformPose(poselist_tag_wrt_camera, camera_frame, base_frame)
233 | rospy.logdebug("transformPose(poselist_tag_wrt_camera, 'camera', 'robot_footprint'): \n %s \n", poselist_tag_wrt_base)
234 |
235 | # Calculate transform of robot base w.r.t. tag (in Rviz arrow points from robot base (child) to tag(parent))
236 | poselist_base_wrt_tag = invPoselist(poselist_tag_wrt_base)
237 | rospy.logdebug("invPoselist( poselist_tag_wrt_base): \n %s \n", poselist_base_wrt_tag)
238 |
239 | # Calculate transform of robot base w.r.t. map (in Rviz arrow points from robot base (child) to map (parent)), returns pose of robot in the map coordinates
240 | poselist_base_wrt_map.append(transformPose(poselist_base_wrt_tag, child_frame_id, target_frame = world_fixed_frame))
241 | rospy.logdebug("transformPose(poselist_base_wrt_tag, sourceFrame = '%s', target_frame = 'map'): \n %s \n", child_frame_id, poselist_base_wrt_map[-1])
242 |
243 | #for counter, robot_pose in enumerate(poselist_base_wrt_map):
244 | # rospy.logdebug("\n Robot pose estimation nr. %s: %s \n",str(counter), robot_pose)
245 |
246 | estimated_avg_pose = averagePose(poselist_base_wrt_map)
247 | rospy.logdebug("\n Robot's estimated avg. pose from all AR tags detected:\n %s \n", estimated_avg_pose)
248 |
249 | # Calculate transform of robot base w.r.t. map or pose of robot in the map coordinates
250 | base_wrt_map_pose(pose = estimated_avg_pose, child_frame_id = base_frame, parent_frame_id = world_fixed_frame)
251 |
252 | map_to_odom_transform()
253 |
254 | def convert_pose_inverse_transform(input_pose):
255 | """ Helper method to invert a transform (this is built into the tf C++ classes, but ommitted from Python) """
256 | translation = np.zeros((4,1))
257 | translation[0] = -input_pose.pose.position.x
258 | translation[1] = -input_pose.pose.position.y
259 | translation[2] = -input_pose.pose.position.z
260 | translation[3] = 1.0
261 |
262 | rotation = (input_pose.pose.orientation.x, input_pose.pose.orientation.y, input_pose.pose.orientation.z, input_pose.pose.orientation.w)
263 | euler_angle = euler_from_quaternion(rotation)
264 | rotation = np.transpose(rotation_matrix(euler_angle[2], [0,0,1])) # the angle is a yaw
265 | transformed_translation = rotation.dot(translation)
266 |
267 | translation = (transformed_translation[0], transformed_translation[1], transformed_translation[2])
268 | rotation = quaternion_from_matrix(rotation)
269 | return (translation, rotation)
270 |
271 | def convert_translation_rotation_to_pose(translation, rotation):
272 | """ Convert from representation of a pose as translation and rotation (Quaternion) tuples to a geometry_msgs/Pose message """
273 | return Pose(position=Point(x=translation[0],y=translation[1],z=translation[2]), orientation=Quaternion(x=rotation[0],y=rotation[1],z=rotation[2],w=rotation[3]))
274 |
275 | def map_to_odom_transform():
276 | """ This method constantly updates the offset of the map and
277 | odometry coordinate systems based on the latest results from
278 | the localizer
279 | """
280 | global new_translation, new_rotation
281 | (translation, rotation) = convert_pose_inverse_transform(robot_pose)
282 | map_wrt_base_pose = PoseStamped(pose=convert_translation_rotation_to_pose(translation,rotation))
283 | map_wrt_base_pose.header.stamp=rospy.Time.now()
284 | map_wrt_base_pose.header.frame_id=base_frame
285 | # access/look-up the transform odom (target/new frame) wrt base(source/current frame):
286 | # tf_buffer.lookup_transform(target_frame, source_frame, query_time, timeout_secs)
287 | ts_odom_wrt_base = tf_buffer.lookup_transform(odom_frame, base_frame, rospy.Time(), rospy.Duration(1.0)) # wait 1s for transform to become available
288 | map_wrt_odom_pose = tf2_geometry_msgs.do_transform_pose(map_wrt_base_pose, ts_odom_wrt_base)
289 | # invert map_wrt_odom_to get odom_wrt_map and store as tuple position, quaternion
290 | (new_translation, new_rotation) = convert_pose_inverse_transform(map_wrt_odom_pose)
291 |
292 | def broadcast_last_transform():
293 | """ Make sure that we are always broadcasting the last
294 | map to odom transformation. This is necessary so
295 | move_base can work properly. """
296 | # Sets the frame ID of the transform to the map frame
297 | ts_odom_wrt_map.header.frame_id = world_fixed_frame
298 | # Stamps the transform with the current time
299 | ts_odom_wrt_map.header.stamp = rospy.Time.now()
300 | # Sets the child frame ID to odom
301 | ts_odom_wrt_map.child_frame_id = odom_frame
302 | if new_translation:
303 | # Fill in coordinates
304 | list(new_translation) # convert an np array to an ordinary list
305 | ts_odom_wrt_map.transform.translation.x = new_translation[0][0]
306 | ts_odom_wrt_map.transform.translation.y = new_translation[1][0]
307 | ts_odom_wrt_map.transform.translation.z = new_translation[2][0]
308 | ts_odom_wrt_map.transform.rotation.x = new_rotation[0]
309 | ts_odom_wrt_map.transform.rotation.y = new_rotation[1]
310 | ts_odom_wrt_map.transform.rotation.z = new_rotation[2]
311 | ts_odom_wrt_map.transform.rotation.w = new_rotation[3]
312 | try:
313 | br_odom_wrt_map.sendTransform(ts_odom_wrt_map)
314 | rospy.logdebug("Broadcasted odom wrt map transform!")
315 | except Exception as exc:
316 | rospy.logwarn(exc)
317 | rospy.logerr("Unexpected error in broadcast of map to odom transformation")
318 |
319 | if __name__=='__main__':
320 | main()
321 |
--------------------------------------------------------------------------------
/config/ar_tag_navigation.rviz:
--------------------------------------------------------------------------------
1 | Panels:
2 | - Class: rviz/Displays
3 | Help Height: 78
4 | Name: Displays
5 | Property Tree Widget:
6 | Expanded:
7 | - /Global Options1
8 | - /Status1
9 | - /TF1/Frames1
10 | - /RobotModel1
11 | Splitter Ratio: 0.5
12 | Tree Height: 621
13 | - Class: rviz/Selection
14 | Name: Selection
15 | - Class: rviz/Tool Properties
16 | Expanded:
17 | - /2D Pose Estimate1
18 | - /2D Nav Goal1
19 | - /Publish Point1
20 | Name: Tool Properties
21 | Splitter Ratio: 0.588679016
22 | - Class: rviz/Views
23 | Expanded:
24 | - /Current View1
25 | Name: Views
26 | Splitter Ratio: 0.5
27 | - Class: rviz/Time
28 | Experimental: false
29 | Name: Time
30 | SyncMode: 0
31 | SyncSource: ""
32 | Toolbars:
33 | toolButtonStyle: 2
34 | Visualization Manager:
35 | Class: ""
36 | Displays:
37 | - Alpha: 0.5
38 | Cell Size: 1
39 | Class: rviz/Grid
40 | Color: 160; 160; 164
41 | Enabled: true
42 | Line Style:
43 | Line Width: 0.0299999993
44 | Value: Lines
45 | Name: Grid
46 | Normal Cell Count: 0
47 | Offset:
48 | X: 0
49 | Y: 0
50 | Z: 0
51 | Plane: XY
52 | Plane Cell Count: 10
53 | Reference Frame:
54 | Value: true
55 | - Class: rviz/TF
56 | Enabled: true
57 | Frame Timeout: 15
58 | Frames:
59 | All Enabled: false
60 | camera:
61 | Value: false
62 | camera_tf_frame:
63 | Value: false
64 | chassis:
65 | Value: false
66 | hokuyo:
67 | Value: false
68 | left_wheel:
69 | Value: false
70 | map:
71 | Value: true
72 | odom:
73 | Value: true
74 | right_wheel:
75 | Value: false
76 | robot_footprint:
77 | Value: true
78 | tag_0:
79 | Value: true
80 | tag_1:
81 | Value: true
82 | tag_111:
83 | Value: true
84 | tag_113:
85 | Value: true
86 | tag_115:
87 | Value: true
88 | tag_117:
89 | Value: true
90 | tag_119:
91 | Value: true
92 | tag_121:
93 | Value: true
94 | tag_16:
95 | Value: true
96 | tag_17:
97 | Value: true
98 | tag_18:
99 | Value: true
100 | tag_19:
101 | Value: true
102 | tag_2:
103 | Value: true
104 | tag_3:
105 | Value: true
106 | tag_30:
107 | Value: true
108 | tag_300:
109 | Value: true
110 | tag_301:
111 | Value: true
112 | tag_302:
113 | Value: true
114 | tag_303:
115 | Value: true
116 | tag_304:
117 | Value: true
118 | tag_305:
119 | Value: true
120 | tag_31:
121 | Value: true
122 | tag_310:
123 | Value: true
124 | tag_311:
125 | Value: true
126 | tag_314:
127 | Value: true
128 | tag_315:
129 | Value: true
130 | tag_316:
131 | Value: true
132 | tag_317:
133 | Value: true
134 | tag_32:
135 | Value: true
136 | tag_33:
137 | Value: true
138 | tag_332:
139 | Value: true
140 | tag_333:
141 | Value: true
142 | tag_336:
143 | Value: true
144 | tag_337:
145 | Value: true
146 | tag_338:
147 | Value: true
148 | tag_339:
149 | Value: true
150 | tag_350:
151 | Value: true
152 | tag_351:
153 | Value: true
154 | tag_352:
155 | Value: true
156 | tag_353:
157 | Value: true
158 | tag_374:
159 | Value: true
160 | tag_375:
161 | Value: true
162 | tag_394:
163 | Value: true
164 | tag_395:
165 | Value: true
166 | tag_398:
167 | Value: true
168 | tag_399:
169 | Value: true
170 | tag_4:
171 | Value: true
172 | tag_400:
173 | Value: true
174 | tag_401:
175 | Value: true
176 | tag_411:
177 | Value: true
178 | tag_413:
179 | Value: true
180 | tag_415:
181 | Value: true
182 | tag_417:
183 | Value: true
184 | tag_419:
185 | Value: true
186 | tag_421:
187 | Value: true
188 | tag_5:
189 | Value: true
190 | tag_54:
191 | Value: true
192 | tag_55:
193 | Value: true
194 | tag_58:
195 | Value: true
196 | tag_59:
197 | Value: true
198 | tag_60:
199 | Value: true
200 | tag_61:
201 | Value: true
202 | tag_76:
203 | Value: true
204 | tag_77:
205 | Value: true
206 | tag_78:
207 | Value: true
208 | tag_79:
209 | Value: true
210 | tag_92:
211 | Value: true
212 | tag_93:
213 | Value: true
214 | tag_94:
215 | Value: true
216 | tag_95:
217 | Value: true
218 | tag_96:
219 | Value: true
220 | tag_97:
221 | Value: true
222 | Marker Scale: 1
223 | Name: TF
224 | Show Arrows: false
225 | Show Axes: true
226 | Show Names: true
227 | Tree:
228 | map:
229 | odom:
230 | robot_footprint:
231 | chassis:
232 | camera:
233 | {}
234 | camera_tf_frame:
235 | {}
236 | hokuyo:
237 | {}
238 | left_wheel:
239 | {}
240 | right_wheel:
241 | {}
242 | tag_0:
243 | {}
244 | tag_1:
245 | {}
246 | tag_111:
247 | {}
248 | tag_113:
249 | {}
250 | tag_115:
251 | {}
252 | tag_117:
253 | {}
254 | tag_119:
255 | {}
256 | tag_121:
257 | {}
258 | tag_16:
259 | {}
260 | tag_17:
261 | {}
262 | tag_18:
263 | {}
264 | tag_19:
265 | {}
266 | tag_2:
267 | {}
268 | tag_3:
269 | {}
270 | tag_30:
271 | {}
272 | tag_300:
273 | {}
274 | tag_301:
275 | {}
276 | tag_302:
277 | {}
278 | tag_303:
279 | {}
280 | tag_304:
281 | {}
282 | tag_305:
283 | {}
284 | tag_31:
285 | {}
286 | tag_310:
287 | {}
288 | tag_311:
289 | {}
290 | tag_314:
291 | {}
292 | tag_315:
293 | {}
294 | tag_316:
295 | {}
296 | tag_317:
297 | {}
298 | tag_32:
299 | {}
300 | tag_33:
301 | {}
302 | tag_332:
303 | {}
304 | tag_333:
305 | {}
306 | tag_336:
307 | {}
308 | tag_337:
309 | {}
310 | tag_338:
311 | {}
312 | tag_339:
313 | {}
314 | tag_350:
315 | {}
316 | tag_351:
317 | {}
318 | tag_352:
319 | {}
320 | tag_353:
321 | {}
322 | tag_374:
323 | {}
324 | tag_375:
325 | {}
326 | tag_394:
327 | {}
328 | tag_395:
329 | {}
330 | tag_398:
331 | {}
332 | tag_399:
333 | {}
334 | tag_4:
335 | {}
336 | tag_400:
337 | {}
338 | tag_401:
339 | {}
340 | tag_411:
341 | {}
342 | tag_413:
343 | {}
344 | tag_415:
345 | {}
346 | tag_417:
347 | {}
348 | tag_419:
349 | {}
350 | tag_421:
351 | {}
352 | tag_5:
353 | {}
354 | tag_54:
355 | {}
356 | tag_55:
357 | {}
358 | tag_58:
359 | {}
360 | tag_59:
361 | {}
362 | tag_60:
363 | {}
364 | tag_61:
365 | {}
366 | tag_76:
367 | {}
368 | tag_77:
369 | {}
370 | tag_78:
371 | {}
372 | tag_79:
373 | {}
374 | tag_92:
375 | {}
376 | tag_93:
377 | {}
378 | tag_94:
379 | {}
380 | tag_95:
381 | {}
382 | tag_96:
383 | {}
384 | tag_97:
385 | {}
386 | Update Interval: 0
387 | Value: true
388 | - Alpha: 0.300000012
389 | Class: rviz/RobotModel
390 | Collision Enabled: false
391 | Enabled: true
392 | Links:
393 | All Links Enabled: true
394 | Expand Joint Details: false
395 | Expand Link Details: false
396 | Expand Tree: false
397 | Link Tree Style: Links in Alphabetic Order
398 | camera:
399 | Alpha: 1
400 | Show Axes: false
401 | Show Trail: false
402 | Value: true
403 | camera_tf_frame:
404 | Alpha: 1
405 | Show Axes: false
406 | Show Trail: false
407 | chassis:
408 | Alpha: 1
409 | Show Axes: false
410 | Show Trail: false
411 | Value: true
412 | hokuyo:
413 | Alpha: 1
414 | Show Axes: false
415 | Show Trail: false
416 | Value: true
417 | left_wheel:
418 | Alpha: 1
419 | Show Axes: false
420 | Show Trail: false
421 | Value: true
422 | right_wheel:
423 | Alpha: 1
424 | Show Axes: false
425 | Show Trail: false
426 | Value: true
427 | robot_footprint:
428 | Alpha: 1
429 | Show Axes: false
430 | Show Trail: false
431 | Name: RobotModel
432 | Robot Description: robot_description
433 | TF Prefix: ""
434 | Update Interval: 0
435 | Value: true
436 | Visual Enabled: true
437 | - Alpha: 0.699999988
438 | Class: rviz/Map
439 | Color Scheme: map
440 | Draw Behind: false
441 | Enabled: true
442 | Name: Map
443 | Topic: /map
444 | Unreliable: false
445 | Use Timestamp: false
446 | Value: true
447 | - Alpha: 1
448 | Axes Length: 1
449 | Axes Radius: 0.100000001
450 | Class: rviz/Pose
451 | Color: 255; 25; 0
452 | Enabled: true
453 | Head Length: 0.300000012
454 | Head Radius: 0.100000001
455 | Name: Navigation Goal
456 | Shaft Length: 1
457 | Shaft Radius: 0.0500000007
458 | Shape: Arrow
459 | Topic: /move_base_simple/goal
460 | Unreliable: false
461 | Value: true
462 | - Alpha: 1
463 | Class: rviz/Polygon
464 | Color: 25; 255; 0
465 | Enabled: true
466 | Name: Robot Footprint
467 | Topic: /move_base/local_costmap/footprint
468 | Unreliable: false
469 | Value: true
470 | - Alpha: 0.699999988
471 | Class: rviz/Map
472 | Color Scheme: map
473 | Draw Behind: false
474 | Enabled: true
475 | Name: Global Costmap
476 | Topic: /move_base/global_costmap/costmap
477 | Unreliable: false
478 | Use Timestamp: false
479 | Value: true
480 | - Alpha: 0.699999988
481 | Class: rviz/Map
482 | Color Scheme: costmap
483 | Draw Behind: false
484 | Enabled: true
485 | Name: Local Costmap
486 | Topic: /move_base/local_costmap/costmap
487 | Unreliable: false
488 | Use Timestamp: false
489 | Value: true
490 | - Alpha: 1
491 | Buffer Length: 1
492 | Class: rviz/Path
493 | Color: 25; 255; 0
494 | Enabled: true
495 | Head Diameter: 0.300000012
496 | Head Length: 0.200000003
497 | Length: 0.300000012
498 | Line Style: Lines
499 | Line Width: 0.0299999993
500 | Name: Global Path
501 | Offset:
502 | X: 0
503 | Y: 0
504 | Z: 0
505 | Pose Color: 255; 85; 255
506 | Pose Style: None
507 | Radius: 0.0299999993
508 | Shaft Diameter: 0.100000001
509 | Shaft Length: 0.100000001
510 | Topic: /move_base/NavfnROS/plan
511 | Unreliable: false
512 | Value: true
513 | - Alpha: 1
514 | Buffer Length: 1
515 | Class: rviz/Path
516 | Color: 255; 0; 0
517 | Enabled: true
518 | Head Diameter: 0.300000012
519 | Head Length: 0.200000003
520 | Length: 0.300000012
521 | Line Style: Lines
522 | Line Width: 0.0299999993
523 | Name: Local Path
524 | Offset:
525 | X: 0
526 | Y: 0
527 | Z: 0
528 | Pose Color: 255; 85; 255
529 | Pose Style: None
530 | Radius: 0.0299999993
531 | Shaft Diameter: 0.100000001
532 | Shaft Length: 0.100000001
533 | Topic: /move_base/TrajectoryPlannerROS/local_plan
534 | Unreliable: false
535 | Value: true
536 | Enabled: true
537 | Global Options:
538 | Background Color: 48; 48; 48
539 | Default Light: true
540 | Fixed Frame: map
541 | Frame Rate: 30
542 | Name: root
543 | Tools:
544 | - Class: rviz/Interact
545 | Hide Inactive Objects: true
546 | - Class: rviz/MoveCamera
547 | - Class: rviz/Select
548 | - Class: rviz/FocusCamera
549 | - Class: rviz/Measure
550 | - Class: rviz/SetInitialPose
551 | Topic: /initialpose
552 | - Class: rviz/SetGoal
553 | Topic: /move_base_simple/goal
554 | - Class: rviz/PublishPoint
555 | Single click: true
556 | Topic: /clicked_point
557 | Value: true
558 | Views:
559 | Current:
560 | Class: rviz/Orbit
561 | Distance: 5.05669641
562 | Enable Stereo Rendering:
563 | Stereo Eye Separation: 0.0599999987
564 | Stereo Focal Distance: 1
565 | Swap Stereo Eyes: false
566 | Value: false
567 | Focal Point:
568 | X: 1.12157452
569 | Y: 0.31264618
570 | Z: 1.02451193
571 | Focal Shape Fixed Size: true
572 | Focal Shape Size: 0.0500000007
573 | Invert Z Axis: false
574 | Name: Current View
575 | Near Clip Distance: 0.00999999978
576 | Pitch: 0.74039799
577 | Target Frame:
578 | Value: Orbit (rviz)
579 | Yaw: 5.4835844
580 | Saved: ~
581 | Window Geometry:
582 | Displays:
583 | collapsed: false
584 | Height: 909
585 | Hide Left Dock: false
586 | Hide Right Dock: false
587 | QMainWindow State: 000000ff00000000fd000000040000000000000156000002f5fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003a000002f5000000c600fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002f5fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003a000002f50000009e00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d00650100000000000007800000024400fffffffb0000000800540069006d006501000000000000045000000000000000000000050f000002f500000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
588 | Selection:
589 | collapsed: false
590 | Time:
591 | collapsed: false
592 | Tool Properties:
593 | collapsed: false
594 | Views:
595 | collapsed: false
596 | Width: 1920
597 | X: 0
598 | Y: 0
599 |
--------------------------------------------------------------------------------
/config/tag_sizes.yaml:
--------------------------------------------------------------------------------
1 | ---
2 | -
3 | id: 0
4 | frame_id: tag_0
5 | size: 0.16
6 | -
7 | id: 1
8 | frame_id: tag_1
9 | size: 0.16
10 | -
11 | id: 2
12 | frame_id: tag_2
13 | size: 0.16
14 | -
15 | id: 3
16 | frame_id: tag_3
17 | size: 0.16
18 | -
19 | id: 4
20 | frame_id: tag_4
21 | size: 0.16
22 | -
23 | id: 5
24 | frame_id: tag_5
25 | size: 0.16
26 | -
27 | id: 6
28 | frame_id: tag_6
29 | size: 0.16
30 | -
31 | id: 7
32 | frame_id: tag_7
33 | size: 0.16
34 | -
35 | id: 8
36 | frame_id: tag_8
37 | size: 0.16
38 | -
39 | id: 9
40 | frame_id: tag_9
41 | size: 0.16
42 | -
43 | id: 10
44 | frame_id: tag_10
45 | size: 0.16
46 | -
47 | id: 11
48 | frame_id: tag_11
49 | size: 0.16
50 | -
51 | id: 12
52 | frame_id: tag_12
53 | size: 0.16
54 | -
55 | id: 13
56 | frame_id: tag_13
57 | size: 0.16
58 | -
59 | id: 14
60 | frame_id: tag_14
61 | size: 0.16
62 | -
63 | id: 15
64 | frame_id: tag_15
65 | size: 0.16
66 | -
67 | id: 16
68 | frame_id: tag_16
69 | size: 0.16
70 | -
71 | id: 17
72 | frame_id: tag_17
73 | size: 0.16
74 | -
75 | id: 18
76 | frame_id: tag_18
77 | size: 0.16
78 | -
79 | id: 19
80 | frame_id: tag_19
81 | size: 0.16
82 | -
83 | id: 20
84 | frame_id: tag_20
85 | size: 0.16
86 | -
87 | id: 21
88 | frame_id: tag_21
89 | size: 0.16
90 | -
91 | id: 22
92 | frame_id: tag_22
93 | size: 0.16
94 | -
95 | id: 23
96 | frame_id: tag_23
97 | size: 0.16
98 | -
99 | id: 24
100 | frame_id: tag_24
101 | size: 0.16
102 | -
103 | id: 25
104 | frame_id: tag_25
105 | size: 0.16
106 | -
107 | id: 26
108 | frame_id: tag_26
109 | size: 0.16
110 | -
111 | id: 27
112 | frame_id: tag_27
113 | size: 0.16
114 | -
115 | id: 28
116 | frame_id: tag_28
117 | size: 0.16
118 | -
119 | id: 29
120 | frame_id: tag_29
121 | size: 0.16
122 | -
123 | id: 30
124 | frame_id: tag_30
125 | size: 0.16
126 | -
127 | id: 31
128 | frame_id: tag_31
129 | size: 0.16
130 | -
131 | id: 32
132 | frame_id: tag_32
133 | size: 0.16
134 | -
135 | id: 33
136 | frame_id: tag_33
137 | size: 0.16
138 | -
139 | id: 34
140 | frame_id: tag_34
141 | size: 0.16
142 | -
143 | id: 35
144 | frame_id: tag_35
145 | size: 0.16
146 | -
147 | id: 36
148 | frame_id: tag_36
149 | size: 0.16
150 | -
151 | id: 37
152 | frame_id: tag_37
153 | size: 0.16
154 | -
155 | id: 38
156 | frame_id: tag_38
157 | size: 0.16
158 | -
159 | id: 39
160 | frame_id: tag_39
161 | size: 0.16
162 | -
163 | id: 40
164 | frame_id: tag_40
165 | size: 0.16
166 | -
167 | id: 41
168 | frame_id: tag_41
169 | size: 0.16
170 | -
171 | id: 42
172 | frame_id: tag_42
173 | size: 0.16
174 | -
175 | id: 43
176 | frame_id: tag_43
177 | size: 0.16
178 | -
179 | id: 44
180 | frame_id: tag_44
181 | size: 0.16
182 | -
183 | id: 45
184 | frame_id: tag_45
185 | size: 0.16
186 | -
187 | id: 46
188 | frame_id: tag_46
189 | size: 0.16
190 | -
191 | id: 47
192 | frame_id: tag_47
193 | size: 0.16
194 | -
195 | id: 48
196 | frame_id: tag_48
197 | size: 0.16
198 | -
199 | id: 49
200 | frame_id: tag_49
201 | size: 0.16
202 | -
203 | id: 50
204 | frame_id: tag_50
205 | size: 0.16
206 | -
207 | id: 51
208 | frame_id: tag_51
209 | size: 0.16
210 | -
211 | id: 52
212 | frame_id: tag_52
213 | size: 0.16
214 | -
215 | id: 53
216 | frame_id: tag_53
217 | size: 0.16
218 | -
219 | id: 54
220 | frame_id: tag_54
221 | size: 0.16
222 | -
223 | id: 55
224 | frame_id: tag_55
225 | size: 0.16
226 | -
227 | id: 56
228 | frame_id: tag_56
229 | size: 0.16
230 | -
231 | id: 57
232 | frame_id: tag_57
233 | size: 0.16
234 | -
235 | id: 58
236 | frame_id: tag_58
237 | size: 0.16
238 | -
239 | id: 59
240 | frame_id: tag_59
241 | size: 0.16
242 | -
243 | id: 60
244 | frame_id: tag_60
245 | size: 0.16
246 | -
247 | id: 61
248 | frame_id: tag_61
249 | size: 0.16
250 | -
251 | id: 62
252 | frame_id: tag_62
253 | size: 0.16
254 | -
255 | id: 63
256 | frame_id: tag_63
257 | size: 0.16
258 | -
259 | id: 64
260 | frame_id: tag_64
261 | size: 0.16
262 | -
263 | id: 65
264 | frame_id: tag_65
265 | size: 0.16
266 | -
267 | id: 66
268 | frame_id: tag_66
269 | size: 0.16
270 | -
271 | id: 67
272 | frame_id: tag_67
273 | size: 0.16
274 | -
275 | id: 68
276 | frame_id: tag_68
277 | size: 0.16
278 | -
279 | id: 69
280 | frame_id: tag_69
281 | size: 0.16
282 | -
283 | id: 70
284 | frame_id: tag_70
285 | size: 0.16
286 | -
287 | id: 71
288 | frame_id: tag_71
289 | size: 0.16
290 | -
291 | id: 72
292 | frame_id: tag_72
293 | size: 0.16
294 | -
295 | id: 73
296 | frame_id: tag_73
297 | size: 0.16
298 | -
299 | id: 74
300 | frame_id: tag_74
301 | size: 0.16
302 | -
303 | id: 75
304 | frame_id: tag_75
305 | size: 0.16
306 | -
307 | id: 76
308 | frame_id: tag_76
309 | size: 0.16
310 | -
311 | id: 77
312 | frame_id: tag_77
313 | size: 0.16
314 | -
315 | id: 78
316 | frame_id: tag_78
317 | size: 0.16
318 | -
319 | id: 79
320 | frame_id: tag_79
321 | size: 0.16
322 | -
323 | id: 80
324 | frame_id: tag_80
325 | size: 0.16
326 | -
327 | id: 81
328 | frame_id: tag_81
329 | size: 0.16
330 | -
331 | id: 82
332 | frame_id: tag_82
333 | size: 0.16
334 | -
335 | id: 83
336 | frame_id: tag_83
337 | size: 0.16
338 | -
339 | id: 84
340 | frame_id: tag_84
341 | size: 0.16
342 | -
343 | id: 85
344 | frame_id: tag_85
345 | size: 0.16
346 | -
347 | id: 86
348 | frame_id: tag_86
349 | size: 0.16
350 | -
351 | id: 87
352 | frame_id: tag_87
353 | size: 0.16
354 | -
355 | id: 88
356 | frame_id: tag_88
357 | size: 0.16
358 | -
359 | id: 89
360 | frame_id: tag_89
361 | size: 0.16
362 | -
363 | id: 90
364 | frame_id: tag_90
365 | size: 0.16
366 | -
367 | id: 91
368 | frame_id: tag_91
369 | size: 0.16
370 | -
371 | id: 92
372 | frame_id: tag_92
373 | size: 0.16
374 | -
375 | id: 93
376 | frame_id: tag_93
377 | size: 0.16
378 | -
379 | id: 94
380 | frame_id: tag_94
381 | size: 0.16
382 | -
383 | id: 95
384 | frame_id: tag_95
385 | size: 0.16
386 | -
387 | id: 96
388 | frame_id: tag_96
389 | size: 0.16
390 | -
391 | id: 97
392 | frame_id: tag_97
393 | size: 0.16
394 | -
395 | id: 98
396 | frame_id: tag_98
397 | size: 0.16
398 | -
399 | id: 99
400 | frame_id: tag_99
401 | size: 0.16
402 | -
403 | id: 100
404 | frame_id: tag_100
405 | size: 0.16
406 | -
407 | id: 101
408 | frame_id: tag_101
409 | size: 0.16
410 | -
411 | id: 102
412 | frame_id: tag_102
413 | size: 0.16
414 | -
415 | id: 103
416 | frame_id: tag_103
417 | size: 0.16
418 | -
419 | id: 104
420 | frame_id: tag_104
421 | size: 0.16
422 | -
423 | id: 105
424 | frame_id: tag_105
425 | size: 0.16
426 | -
427 | id: 106
428 | frame_id: tag_106
429 | size: 0.16
430 | -
431 | id: 107
432 | frame_id: tag_107
433 | size: 0.16
434 | -
435 | id: 108
436 | frame_id: tag_108
437 | size: 0.16
438 | -
439 | id: 109
440 | frame_id: tag_109
441 | size: 0.16
442 | -
443 | id: 110
444 | frame_id: tag_110
445 | size: 0.16
446 | -
447 | id: 111
448 | frame_id: tag_111
449 | size: 0.16
450 | -
451 | id: 112
452 | frame_id: tag_112
453 | size: 0.16
454 | -
455 | id: 113
456 | frame_id: tag_113
457 | size: 0.16
458 | -
459 | id: 114
460 | frame_id: tag_114
461 | size: 0.16
462 | -
463 | id: 115
464 | frame_id: tag_115
465 | size: 0.16
466 | -
467 | id: 116
468 | frame_id: tag_116
469 | size: 0.16
470 | -
471 | id: 117
472 | frame_id: tag_117
473 | size: 0.16
474 | -
475 | id: 118
476 | frame_id: tag_118
477 | size: 0.16
478 | -
479 | id: 119
480 | frame_id: tag_119
481 | size: 0.16
482 | -
483 | id: 120
484 | frame_id: tag_120
485 | size: 0.16
486 | -
487 | id: 121
488 | frame_id: tag_121
489 | size: 0.16
490 | -
491 | id: 122
492 | frame_id: tag_122
493 | size: 0.16
494 | -
495 | id: 123
496 | frame_id: tag_123
497 | size: 0.16
498 | -
499 | id: 124
500 | frame_id: tag_124
501 | size: 0.16
502 | -
503 | id: 125
504 | frame_id: tag_125
505 | size: 0.16
506 | -
507 | id: 126
508 | frame_id: tag_126
509 | size: 0.16
510 | -
511 | id: 127
512 | frame_id: tag_127
513 | size: 0.16
514 | -
515 | id: 128
516 | frame_id: tag_128
517 | size: 0.16
518 | -
519 | id: 129
520 | frame_id: tag_129
521 | size: 0.16
522 | -
523 | id: 130
524 | frame_id: tag_130
525 | size: 0.16
526 | -
527 | id: 131
528 | frame_id: tag_131
529 | size: 0.16
530 | -
531 | id: 132
532 | frame_id: tag_132
533 | size: 0.16
534 | -
535 | id: 133
536 | frame_id: tag_133
537 | size: 0.16
538 | -
539 | id: 134
540 | frame_id: tag_134
541 | size: 0.16
542 | -
543 | id: 135
544 | frame_id: tag_135
545 | size: 0.16
546 | -
547 | id: 136
548 | frame_id: tag_136
549 | size: 0.16
550 | -
551 | id: 137
552 | frame_id: tag_137
553 | size: 0.16
554 | -
555 | id: 138
556 | frame_id: tag_138
557 | size: 0.16
558 | -
559 | id: 139
560 | frame_id: tag_139
561 | size: 0.16
562 | -
563 | id: 140
564 | frame_id: tag_140
565 | size: 0.16
566 | -
567 | id: 141
568 | frame_id: tag_141
569 | size: 0.16
570 | -
571 | id: 142
572 | frame_id: tag_142
573 | size: 0.16
574 | -
575 | id: 143
576 | frame_id: tag_143
577 | size: 0.16
578 | -
579 | id: 144
580 | frame_id: tag_144
581 | size: 0.16
582 | -
583 | id: 145
584 | frame_id: tag_145
585 | size: 0.16
586 | -
587 | id: 146
588 | frame_id: tag_146
589 | size: 0.16
590 | -
591 | id: 147
592 | frame_id: tag_147
593 | size: 0.16
594 | -
595 | id: 148
596 | frame_id: tag_148
597 | size: 0.16
598 | -
599 | id: 149
600 | frame_id: tag_149
601 | size: 0.16
602 | -
603 | id: 150
604 | frame_id: tag_150
605 | size: 0.16
606 | -
607 | id: 151
608 | frame_id: tag_151
609 | size: 0.16
610 | -
611 | id: 152
612 | frame_id: tag_152
613 | size: 0.16
614 | -
615 | id: 153
616 | frame_id: tag_153
617 | size: 0.16
618 | -
619 | id: 154
620 | frame_id: tag_154
621 | size: 0.16
622 | -
623 | id: 155
624 | frame_id: tag_155
625 | size: 0.16
626 | -
627 | id: 156
628 | frame_id: tag_156
629 | size: 0.16
630 | -
631 | id: 157
632 | frame_id: tag_157
633 | size: 0.16
634 | -
635 | id: 158
636 | frame_id: tag_158
637 | size: 0.16
638 | -
639 | id: 159
640 | frame_id: tag_159
641 | size: 0.16
642 | -
643 | id: 160
644 | frame_id: tag_160
645 | size: 0.16
646 | -
647 | id: 161
648 | frame_id: tag_161
649 | size: 0.16
650 | -
651 | id: 162
652 | frame_id: tag_162
653 | size: 0.16
654 | -
655 | id: 163
656 | frame_id: tag_163
657 | size: 0.16
658 | -
659 | id: 164
660 | frame_id: tag_164
661 | size: 0.16
662 | -
663 | id: 165
664 | frame_id: tag_165
665 | size: 0.16
666 | -
667 | id: 166
668 | frame_id: tag_166
669 | size: 0.16
670 | -
671 | id: 167
672 | frame_id: tag_167
673 | size: 0.16
674 | -
675 | id: 168
676 | frame_id: tag_168
677 | size: 0.16
678 | -
679 | id: 169
680 | frame_id: tag_169
681 | size: 0.16
682 | -
683 | id: 170
684 | frame_id: tag_170
685 | size: 0.16
686 | -
687 | id: 171
688 | frame_id: tag_171
689 | size: 0.16
690 | -
691 | id: 172
692 | frame_id: tag_172
693 | size: 0.16
694 | -
695 | id: 173
696 | frame_id: tag_173
697 | size: 0.16
698 | -
699 | id: 174
700 | frame_id: tag_174
701 | size: 0.16
702 | -
703 | id: 175
704 | frame_id: tag_175
705 | size: 0.16
706 | -
707 | id: 176
708 | frame_id: tag_176
709 | size: 0.16
710 | -
711 | id: 177
712 | frame_id: tag_177
713 | size: 0.16
714 | -
715 | id: 178
716 | frame_id: tag_178
717 | size: 0.16
718 | -
719 | id: 179
720 | frame_id: tag_179
721 | size: 0.16
722 | -
723 | id: 180
724 | frame_id: tag_180
725 | size: 0.16
726 | -
727 | id: 181
728 | frame_id: tag_181
729 | size: 0.16
730 | -
731 | id: 182
732 | frame_id: tag_182
733 | size: 0.16
734 | -
735 | id: 183
736 | frame_id: tag_183
737 | size: 0.16
738 | -
739 | id: 184
740 | frame_id: tag_184
741 | size: 0.16
742 | -
743 | id: 185
744 | frame_id: tag_185
745 | size: 0.16
746 | -
747 | id: 186
748 | frame_id: tag_186
749 | size: 0.16
750 | -
751 | id: 187
752 | frame_id: tag_187
753 | size: 0.16
754 | -
755 | id: 188
756 | frame_id: tag_188
757 | size: 0.16
758 | -
759 | id: 189
760 | frame_id: tag_189
761 | size: 0.16
762 | -
763 | id: 190
764 | frame_id: tag_190
765 | size: 0.16
766 | -
767 | id: 191
768 | frame_id: tag_191
769 | size: 0.16
770 | -
771 | id: 192
772 | frame_id: tag_192
773 | size: 0.16
774 | -
775 | id: 193
776 | frame_id: tag_193
777 | size: 0.16
778 | -
779 | id: 194
780 | frame_id: tag_194
781 | size: 0.16
782 | -
783 | id: 195
784 | frame_id: tag_195
785 | size: 0.16
786 | -
787 | id: 196
788 | frame_id: tag_196
789 | size: 0.16
790 | -
791 | id: 197
792 | frame_id: tag_197
793 | size: 0.16
794 | -
795 | id: 198
796 | frame_id: tag_198
797 | size: 0.16
798 | -
799 | id: 199
800 | frame_id: tag_199
801 | size: 0.16
802 | -
803 | id: 200
804 | frame_id: tag_200
805 | size: 0.16
806 | -
807 | id: 201
808 | frame_id: tag_201
809 | size: 0.16
810 | -
811 | id: 202
812 | frame_id: tag_202
813 | size: 0.16
814 | -
815 | id: 203
816 | frame_id: tag_203
817 | size: 0.16
818 | -
819 | id: 204
820 | frame_id: tag_204
821 | size: 0.16
822 | -
823 | id: 205
824 | frame_id: tag_205
825 | size: 0.16
826 | -
827 | id: 206
828 | frame_id: tag_206
829 | size: 0.16
830 | -
831 | id: 207
832 | frame_id: tag_207
833 | size: 0.16
834 | -
835 | id: 208
836 | frame_id: tag_208
837 | size: 0.16
838 | -
839 | id: 209
840 | frame_id: tag_209
841 | size: 0.16
842 | -
843 | id: 210
844 | frame_id: tag_210
845 | size: 0.16
846 | -
847 | id: 211
848 | frame_id: tag_211
849 | size: 0.16
850 | -
851 | id: 212
852 | frame_id: tag_212
853 | size: 0.16
854 | -
855 | id: 213
856 | frame_id: tag_213
857 | size: 0.16
858 | -
859 | id: 214
860 | frame_id: tag_214
861 | size: 0.16
862 | -
863 | id: 215
864 | frame_id: tag_215
865 | size: 0.16
866 | -
867 | id: 216
868 | frame_id: tag_216
869 | size: 0.16
870 | -
871 | id: 217
872 | frame_id: tag_217
873 | size: 0.16
874 | -
875 | id: 218
876 | frame_id: tag_218
877 | size: 0.16
878 | -
879 | id: 219
880 | frame_id: tag_219
881 | size: 0.16
882 | -
883 | id: 220
884 | frame_id: tag_220
885 | size: 0.16
886 | -
887 | id: 221
888 | frame_id: tag_221
889 | size: 0.16
890 | -
891 | id: 222
892 | frame_id: tag_222
893 | size: 0.16
894 | -
895 | id: 223
896 | frame_id: tag_223
897 | size: 0.16
898 | -
899 | id: 224
900 | frame_id: tag_224
901 | size: 0.16
902 | -
903 | id: 225
904 | frame_id: tag_225
905 | size: 0.16
906 | -
907 | id: 226
908 | frame_id: tag_226
909 | size: 0.16
910 | -
911 | id: 227
912 | frame_id: tag_227
913 | size: 0.16
914 | -
915 | id: 228
916 | frame_id: tag_228
917 | size: 0.16
918 | -
919 | id: 229
920 | frame_id: tag_229
921 | size: 0.16
922 | -
923 | id: 230
924 | frame_id: tag_230
925 | size: 0.16
926 | -
927 | id: 231
928 | frame_id: tag_231
929 | size: 0.16
930 | -
931 | id: 232
932 | frame_id: tag_232
933 | size: 0.16
934 | -
935 | id: 233
936 | frame_id: tag_233
937 | size: 0.16
938 | -
939 | id: 234
940 | frame_id: tag_234
941 | size: 0.16
942 | -
943 | id: 235
944 | frame_id: tag_235
945 | size: 0.16
946 | -
947 | id: 236
948 | frame_id: tag_236
949 | size: 0.16
950 | -
951 | id: 237
952 | frame_id: tag_237
953 | size: 0.16
954 | -
955 | id: 238
956 | frame_id: tag_238
957 | size: 0.16
958 | -
959 | id: 239
960 | frame_id: tag_239
961 | size: 0.16
962 | -
963 | id: 240
964 | frame_id: tag_240
965 | size: 0.16
966 | -
967 | id: 241
968 | frame_id: tag_241
969 | size: 0.16
970 | -
971 | id: 242
972 | frame_id: tag_242
973 | size: 0.16
974 | -
975 | id: 243
976 | frame_id: tag_243
977 | size: 0.16
978 | -
979 | id: 244
980 | frame_id: tag_244
981 | size: 0.16
982 | -
983 | id: 245
984 | frame_id: tag_245
985 | size: 0.16
986 | -
987 | id: 246
988 | frame_id: tag_246
989 | size: 0.16
990 | -
991 | id: 247
992 | frame_id: tag_247
993 | size: 0.16
994 | -
995 | id: 248
996 | frame_id: tag_248
997 | size: 0.16
998 | -
999 | id: 249
1000 | frame_id: tag_249
1001 | size: 0.16
1002 | -
1003 | id: 250
1004 | frame_id: tag_250
1005 | size: 0.16
1006 | -
1007 | id: 251
1008 | frame_id: tag_251
1009 | size: 0.16
1010 | -
1011 | id: 252
1012 | frame_id: tag_252
1013 | size: 0.16
1014 | -
1015 | id: 253
1016 | frame_id: tag_253
1017 | size: 0.16
1018 | -
1019 | id: 254
1020 | frame_id: tag_254
1021 | size: 0.16
1022 | -
1023 | id: 255
1024 | frame_id: tag_255
1025 | size: 0.16
1026 | -
1027 | id: 256
1028 | frame_id: tag_256
1029 | size: 0.16
1030 | -
1031 | id: 257
1032 | frame_id: tag_257
1033 | size: 0.16
1034 | -
1035 | id: 258
1036 | frame_id: tag_258
1037 | size: 0.16
1038 | -
1039 | id: 259
1040 | frame_id: tag_259
1041 | size: 0.16
1042 | -
1043 | id: 260
1044 | frame_id: tag_260
1045 | size: 0.16
1046 | -
1047 | id: 261
1048 | frame_id: tag_261
1049 | size: 0.16
1050 | -
1051 | id: 262
1052 | frame_id: tag_262
1053 | size: 0.16
1054 | -
1055 | id: 263
1056 | frame_id: tag_263
1057 | size: 0.16
1058 | -
1059 | id: 264
1060 | frame_id: tag_264
1061 | size: 0.16
1062 | -
1063 | id: 265
1064 | frame_id: tag_265
1065 | size: 0.16
1066 | -
1067 | id: 266
1068 | frame_id: tag_266
1069 | size: 0.16
1070 | -
1071 | id: 267
1072 | frame_id: tag_267
1073 | size: 0.16
1074 | -
1075 | id: 268
1076 | frame_id: tag_268
1077 | size: 0.16
1078 | -
1079 | id: 269
1080 | frame_id: tag_269
1081 | size: 0.16
1082 | -
1083 | id: 270
1084 | frame_id: tag_270
1085 | size: 0.16
1086 | -
1087 | id: 271
1088 | frame_id: tag_271
1089 | size: 0.16
1090 | -
1091 | id: 272
1092 | frame_id: tag_272
1093 | size: 0.16
1094 | -
1095 | id: 273
1096 | frame_id: tag_273
1097 | size: 0.16
1098 | -
1099 | id: 274
1100 | frame_id: tag_274
1101 | size: 0.16
1102 | -
1103 | id: 275
1104 | frame_id: tag_275
1105 | size: 0.16
1106 | -
1107 | id: 276
1108 | frame_id: tag_276
1109 | size: 0.16
1110 | -
1111 | id: 277
1112 | frame_id: tag_277
1113 | size: 0.16
1114 | -
1115 | id: 278
1116 | frame_id: tag_278
1117 | size: 0.16
1118 | -
1119 | id: 279
1120 | frame_id: tag_279
1121 | size: 0.16
1122 | -
1123 | id: 280
1124 | frame_id: tag_280
1125 | size: 0.16
1126 | -
1127 | id: 281
1128 | frame_id: tag_281
1129 | size: 0.16
1130 | -
1131 | id: 282
1132 | frame_id: tag_282
1133 | size: 0.16
1134 | -
1135 | id: 283
1136 | frame_id: tag_283
1137 | size: 0.16
1138 | -
1139 | id: 284
1140 | frame_id: tag_284
1141 | size: 0.16
1142 | -
1143 | id: 285
1144 | frame_id: tag_285
1145 | size: 0.16
1146 | -
1147 | id: 286
1148 | frame_id: tag_286
1149 | size: 0.16
1150 | -
1151 | id: 287
1152 | frame_id: tag_287
1153 | size: 0.16
1154 | -
1155 | id: 288
1156 | frame_id: tag_288
1157 | size: 0.16
1158 | -
1159 | id: 289
1160 | frame_id: tag_289
1161 | size: 0.16
1162 | -
1163 | id: 290
1164 | frame_id: tag_290
1165 | size: 0.16
1166 | -
1167 | id: 291
1168 | frame_id: tag_291
1169 | size: 0.16
1170 | -
1171 | id: 292
1172 | frame_id: tag_292
1173 | size: 0.16
1174 | -
1175 | id: 293
1176 | frame_id: tag_293
1177 | size: 0.16
1178 | -
1179 | id: 294
1180 | frame_id: tag_294
1181 | size: 0.16
1182 | -
1183 | id: 295
1184 | frame_id: tag_295
1185 | size: 0.16
1186 | -
1187 | id: 296
1188 | frame_id: tag_296
1189 | size: 0.16
1190 | -
1191 | id: 297
1192 | frame_id: tag_297
1193 | size: 0.16
1194 | -
1195 | id: 298
1196 | frame_id: tag_298
1197 | size: 0.16
1198 | -
1199 | id: 299
1200 | frame_id: tag_299
1201 | size: 0.16
1202 | -
1203 | id: 300
1204 | frame_id: tag_300
1205 | size: 0.16
1206 | -
1207 | id: 301
1208 | frame_id: tag_301
1209 | size: 0.16
1210 | -
1211 | id: 302
1212 | frame_id: tag_302
1213 | size: 0.16
1214 | -
1215 | id: 303
1216 | frame_id: tag_303
1217 | size: 0.16
1218 | -
1219 | id: 304
1220 | frame_id: tag_304
1221 | size: 0.16
1222 | -
1223 | id: 305
1224 | frame_id: tag_305
1225 | size: 0.16
1226 | -
1227 | id: 306
1228 | frame_id: tag_306
1229 | size: 0.16
1230 | -
1231 | id: 307
1232 | frame_id: tag_307
1233 | size: 0.16
1234 | -
1235 | id: 308
1236 | frame_id: tag_308
1237 | size: 0.16
1238 | -
1239 | id: 309
1240 | frame_id: tag_309
1241 | size: 0.16
1242 | -
1243 | id: 310
1244 | frame_id: tag_310
1245 | size: 0.16
1246 | -
1247 | id: 311
1248 | frame_id: tag_311
1249 | size: 0.16
1250 | -
1251 | id: 312
1252 | frame_id: tag_312
1253 | size: 0.16
1254 | -
1255 | id: 313
1256 | frame_id: tag_313
1257 | size: 0.16
1258 | -
1259 | id: 314
1260 | frame_id: tag_314
1261 | size: 0.16
1262 | -
1263 | id: 315
1264 | frame_id: tag_315
1265 | size: 0.16
1266 | -
1267 | id: 316
1268 | frame_id: tag_316
1269 | size: 0.16
1270 | -
1271 | id: 317
1272 | frame_id: tag_317
1273 | size: 0.16
1274 | -
1275 | id: 318
1276 | frame_id: tag_318
1277 | size: 0.16
1278 | -
1279 | id: 319
1280 | frame_id: tag_319
1281 | size: 0.16
1282 | -
1283 | id: 320
1284 | frame_id: tag_320
1285 | size: 0.16
1286 | -
1287 | id: 321
1288 | frame_id: tag_321
1289 | size: 0.16
1290 | -
1291 | id: 322
1292 | frame_id: tag_322
1293 | size: 0.16
1294 | -
1295 | id: 323
1296 | frame_id: tag_323
1297 | size: 0.16
1298 | -
1299 | id: 324
1300 | frame_id: tag_324
1301 | size: 0.16
1302 | -
1303 | id: 325
1304 | frame_id: tag_325
1305 | size: 0.16
1306 | -
1307 | id: 326
1308 | frame_id: tag_326
1309 | size: 0.16
1310 | -
1311 | id: 327
1312 | frame_id: tag_327
1313 | size: 0.16
1314 | -
1315 | id: 328
1316 | frame_id: tag_328
1317 | size: 0.16
1318 | -
1319 | id: 329
1320 | frame_id: tag_329
1321 | size: 0.16
1322 | -
1323 | id: 330
1324 | frame_id: tag_330
1325 | size: 0.16
1326 | -
1327 | id: 331
1328 | frame_id: tag_331
1329 | size: 0.16
1330 | -
1331 | id: 332
1332 | frame_id: tag_332
1333 | size: 0.16
1334 | -
1335 | id: 333
1336 | frame_id: tag_333
1337 | size: 0.16
1338 | -
1339 | id: 334
1340 | frame_id: tag_334
1341 | size: 0.16
1342 | -
1343 | id: 335
1344 | frame_id: tag_335
1345 | size: 0.16
1346 | -
1347 | id: 336
1348 | frame_id: tag_336
1349 | size: 0.16
1350 | -
1351 | id: 337
1352 | frame_id: tag_337
1353 | size: 0.16
1354 | -
1355 | id: 338
1356 | frame_id: tag_338
1357 | size: 0.16
1358 | -
1359 | id: 339
1360 | frame_id: tag_339
1361 | size: 0.16
1362 | -
1363 | id: 340
1364 | frame_id: tag_340
1365 | size: 0.16
1366 | -
1367 | id: 341
1368 | frame_id: tag_341
1369 | size: 0.16
1370 | -
1371 | id: 342
1372 | frame_id: tag_342
1373 | size: 0.16
1374 | -
1375 | id: 343
1376 | frame_id: tag_343
1377 | size: 0.16
1378 | -
1379 | id: 344
1380 | frame_id: tag_344
1381 | size: 0.16
1382 | -
1383 | id: 345
1384 | frame_id: tag_345
1385 | size: 0.16
1386 | -
1387 | id: 346
1388 | frame_id: tag_346
1389 | size: 0.16
1390 | -
1391 | id: 347
1392 | frame_id: tag_347
1393 | size: 0.16
1394 | -
1395 | id: 348
1396 | frame_id: tag_348
1397 | size: 0.16
1398 | -
1399 | id: 349
1400 | frame_id: tag_349
1401 | size: 0.16
1402 | -
1403 | id: 350
1404 | frame_id: tag_350
1405 | size: 0.16
1406 | -
1407 | id: 351
1408 | frame_id: tag_351
1409 | size: 0.16
1410 | -
1411 | id: 352
1412 | frame_id: tag_352
1413 | size: 0.16
1414 | -
1415 | id: 353
1416 | frame_id: tag_353
1417 | size: 0.16
1418 | -
1419 | id: 354
1420 | frame_id: tag_354
1421 | size: 0.16
1422 | -
1423 | id: 355
1424 | frame_id: tag_355
1425 | size: 0.16
1426 | -
1427 | id: 356
1428 | frame_id: tag_356
1429 | size: 0.16
1430 | -
1431 | id: 357
1432 | frame_id: tag_357
1433 | size: 0.16
1434 | -
1435 | id: 358
1436 | frame_id: tag_358
1437 | size: 0.16
1438 | -
1439 | id: 359
1440 | frame_id: tag_359
1441 | size: 0.16
1442 | -
1443 | id: 360
1444 | frame_id: tag_360
1445 | size: 0.16
1446 | -
1447 | id: 361
1448 | frame_id: tag_361
1449 | size: 0.16
1450 | -
1451 | id: 362
1452 | frame_id: tag_362
1453 | size: 0.16
1454 | -
1455 | id: 363
1456 | frame_id: tag_363
1457 | size: 0.16
1458 | -
1459 | id: 364
1460 | frame_id: tag_364
1461 | size: 0.16
1462 | -
1463 | id: 365
1464 | frame_id: tag_365
1465 | size: 0.16
1466 | -
1467 | id: 366
1468 | frame_id: tag_366
1469 | size: 0.16
1470 | -
1471 | id: 367
1472 | frame_id: tag_367
1473 | size: 0.16
1474 | -
1475 | id: 368
1476 | frame_id: tag_368
1477 | size: 0.16
1478 | -
1479 | id: 369
1480 | frame_id: tag_369
1481 | size: 0.16
1482 | -
1483 | id: 370
1484 | frame_id: tag_370
1485 | size: 0.16
1486 | -
1487 | id: 371
1488 | frame_id: tag_371
1489 | size: 0.16
1490 | -
1491 | id: 372
1492 | frame_id: tag_372
1493 | size: 0.16
1494 | -
1495 | id: 373
1496 | frame_id: tag_373
1497 | size: 0.16
1498 | -
1499 | id: 374
1500 | frame_id: tag_374
1501 | size: 0.16
1502 | -
1503 | id: 375
1504 | frame_id: tag_375
1505 | size: 0.16
1506 | -
1507 | id: 376
1508 | frame_id: tag_376
1509 | size: 0.16
1510 | -
1511 | id: 377
1512 | frame_id: tag_377
1513 | size: 0.16
1514 | -
1515 | id: 378
1516 | frame_id: tag_378
1517 | size: 0.16
1518 | -
1519 | id: 379
1520 | frame_id: tag_379
1521 | size: 0.16
1522 | -
1523 | id: 380
1524 | frame_id: tag_380
1525 | size: 0.16
1526 | -
1527 | id: 381
1528 | frame_id: tag_381
1529 | size: 0.16
1530 | -
1531 | id: 382
1532 | frame_id: tag_382
1533 | size: 0.16
1534 | -
1535 | id: 383
1536 | frame_id: tag_383
1537 | size: 0.16
1538 | -
1539 | id: 384
1540 | frame_id: tag_384
1541 | size: 0.16
1542 | -
1543 | id: 385
1544 | frame_id: tag_385
1545 | size: 0.16
1546 | -
1547 | id: 386
1548 | frame_id: tag_386
1549 | size: 0.16
1550 | -
1551 | id: 387
1552 | frame_id: tag_387
1553 | size: 0.16
1554 | -
1555 | id: 388
1556 | frame_id: tag_388
1557 | size: 0.16
1558 | -
1559 | id: 389
1560 | frame_id: tag_389
1561 | size: 0.16
1562 | -
1563 | id: 390
1564 | frame_id: tag_390
1565 | size: 0.16
1566 | -
1567 | id: 391
1568 | frame_id: tag_391
1569 | size: 0.16
1570 | -
1571 | id: 392
1572 | frame_id: tag_392
1573 | size: 0.16
1574 | -
1575 | id: 393
1576 | frame_id: tag_393
1577 | size: 0.16
1578 | -
1579 | id: 394
1580 | frame_id: tag_394
1581 | size: 0.16
1582 | -
1583 | id: 395
1584 | frame_id: tag_395
1585 | size: 0.16
1586 | -
1587 | id: 396
1588 | frame_id: tag_396
1589 | size: 0.16
1590 | -
1591 | id: 397
1592 | frame_id: tag_397
1593 | size: 0.16
1594 | -
1595 | id: 398
1596 | frame_id: tag_398
1597 | size: 0.16
1598 | -
1599 | id: 399
1600 | frame_id: tag_399
1601 | size: 0.16
1602 | -
1603 | id: 400
1604 | frame_id: tag_400
1605 | size: 0.16
1606 | -
1607 | id: 401
1608 | frame_id: tag_401
1609 | size: 0.16
1610 | -
1611 | id: 402
1612 | frame_id: tag_402
1613 | size: 0.16
1614 | -
1615 | id: 403
1616 | frame_id: tag_403
1617 | size: 0.16
1618 | -
1619 | id: 404
1620 | frame_id: tag_404
1621 | size: 0.16
1622 | -
1623 | id: 405
1624 | frame_id: tag_405
1625 | size: 0.16
1626 | -
1627 | id: 406
1628 | frame_id: tag_406
1629 | size: 0.16
1630 | -
1631 | id: 407
1632 | frame_id: tag_407
1633 | size: 0.16
1634 | -
1635 | id: 408
1636 | frame_id: tag_408
1637 | size: 0.16
1638 | -
1639 | id: 409
1640 | frame_id: tag_409
1641 | size: 0.16
1642 | -
1643 | id: 410
1644 | frame_id: tag_410
1645 | size: 0.16
1646 | -
1647 | id: 411
1648 | frame_id: tag_411
1649 | size: 0.16
1650 | -
1651 | id: 412
1652 | frame_id: tag_412
1653 | size: 0.16
1654 | -
1655 | id: 413
1656 | frame_id: tag_413
1657 | size: 0.16
1658 | -
1659 | id: 414
1660 | frame_id: tag_414
1661 | size: 0.16
1662 | -
1663 | id: 415
1664 | frame_id: tag_415
1665 | size: 0.16
1666 | -
1667 | id: 416
1668 | frame_id: tag_416
1669 | size: 0.16
1670 | -
1671 | id: 417
1672 | frame_id: tag_417
1673 | size: 0.16
1674 | -
1675 | id: 418
1676 | frame_id: tag_418
1677 | size: 0.16
1678 | -
1679 | id: 419
1680 | frame_id: tag_419
1681 | size: 0.16
1682 | -
1683 | id: 420
1684 | frame_id: tag_420
1685 | size: 0.16
1686 | -
1687 | id: 421
1688 | frame_id: tag_421
1689 | size: 0.16
1690 | -
1691 | id: 422
1692 | frame_id: tag_422
1693 | size: 0.16
1694 | -
1695 | id: 423
1696 | frame_id: tag_423
1697 | size: 0.16
1698 | -
1699 | id: 424
1700 | frame_id: tag_424
1701 | size: 0.16
1702 | -
1703 | id: 425
1704 | frame_id: tag_425
1705 | size: 0.16
1706 | -
1707 | id: 426
1708 | frame_id: tag_426
1709 | size: 0.16
1710 | -
1711 | id: 427
1712 | frame_id: tag_427
1713 | size: 0.16
1714 | -
1715 | id: 428
1716 | frame_id: tag_428
1717 | size: 0.16
1718 | -
1719 | id: 429
1720 | frame_id: tag_429
1721 | size: 0.16
1722 | -
1723 | id: 430
1724 | frame_id: tag_430
1725 | size: 0.16
1726 | -
1727 | id: 431
1728 | frame_id: tag_431
1729 | size: 0.16
1730 | -
1731 | id: 432
1732 | frame_id: tag_432
1733 | size: 0.16
1734 | -
1735 | id: 433
1736 | frame_id: tag_433
1737 | size: 0.16
1738 | -
1739 | id: 434
1740 | frame_id: tag_434
1741 | size: 0.16
1742 | -
1743 | id: 435
1744 | frame_id: tag_435
1745 | size: 0.16
1746 | -
1747 | id: 436
1748 | frame_id: tag_436
1749 | size: 0.16
1750 | -
1751 | id: 437
1752 | frame_id: tag_437
1753 | size: 0.16
1754 | -
1755 | id: 438
1756 | frame_id: tag_438
1757 | size: 0.16
1758 | -
1759 | id: 439
1760 | frame_id: tag_439
1761 | size: 0.16
1762 | -
1763 | id: 440
1764 | frame_id: tag_440
1765 | size: 0.16
1766 | -
1767 | id: 441
1768 | frame_id: tag_441
1769 | size: 0.16
1770 | -
1771 | id: 442
1772 | frame_id: tag_442
1773 | size: 0.16
1774 | -
1775 | id: 443
1776 | frame_id: tag_443
1777 | size: 0.16
1778 | -
1779 | id: 444
1780 | frame_id: tag_444
1781 | size: 0.16
1782 | -
1783 | id: 445
1784 | frame_id: tag_445
1785 | size: 0.16
1786 | -
1787 | id: 446
1788 | frame_id: tag_446
1789 | size: 0.16
1790 | -
1791 | id: 447
1792 | frame_id: tag_447
1793 | size: 0.16
1794 | -
1795 | id: 448
1796 | frame_id: tag_448
1797 | size: 0.16
1798 | -
1799 | id: 449
1800 | frame_id: tag_449
1801 | size: 0.16
1802 | -
1803 | id: 450
1804 | frame_id: tag_450
1805 | size: 0.16
1806 | -
1807 | id: 451
1808 | frame_id: tag_451
1809 | size: 0.16
1810 | -
1811 | id: 452
1812 | frame_id: tag_452
1813 | size: 0.16
1814 | -
1815 | id: 453
1816 | frame_id: tag_453
1817 | size: 0.16
1818 | -
1819 | id: 454
1820 | frame_id: tag_454
1821 | size: 0.16
1822 | -
1823 | id: 455
1824 | frame_id: tag_455
1825 | size: 0.16
1826 | -
1827 | id: 456
1828 | frame_id: tag_456
1829 | size: 0.16
1830 | -
1831 | id: 457
1832 | frame_id: tag_457
1833 | size: 0.16
1834 | -
1835 | id: 458
1836 | frame_id: tag_458
1837 | size: 0.16
1838 | -
1839 | id: 459
1840 | frame_id: tag_459
1841 | size: 0.16
1842 | -
1843 | id: 460
1844 | frame_id: tag_460
1845 | size: 0.16
1846 | -
1847 | id: 461
1848 | frame_id: tag_461
1849 | size: 0.16
1850 | -
1851 | id: 462
1852 | frame_id: tag_462
1853 | size: 0.16
1854 | -
1855 | id: 463
1856 | frame_id: tag_463
1857 | size: 0.16
1858 | -
1859 | id: 464
1860 | frame_id: tag_464
1861 | size: 0.16
1862 | -
1863 | id: 465
1864 | frame_id: tag_465
1865 | size: 0.16
1866 | -
1867 | id: 466
1868 | frame_id: tag_466
1869 | size: 0.16
1870 | -
1871 | id: 467
1872 | frame_id: tag_467
1873 | size: 0.16
1874 | -
1875 | id: 468
1876 | frame_id: tag_468
1877 | size: 0.16
1878 | -
1879 | id: 469
1880 | frame_id: tag_469
1881 | size: 0.16
1882 | -
1883 | id: 470
1884 | frame_id: tag_470
1885 | size: 0.16
1886 | -
1887 | id: 471
1888 | frame_id: tag_471
1889 | size: 0.16
1890 | -
1891 | id: 472
1892 | frame_id: tag_472
1893 | size: 0.16
1894 | -
1895 | id: 473
1896 | frame_id: tag_473
1897 | size: 0.16
1898 | -
1899 | id: 474
1900 | frame_id: tag_474
1901 | size: 0.16
1902 | -
1903 | id: 475
1904 | frame_id: tag_475
1905 | size: 0.16
1906 | -
1907 | id: 476
1908 | frame_id: tag_476
1909 | size: 0.16
1910 | -
1911 | id: 477
1912 | frame_id: tag_477
1913 | size: 0.16
1914 | -
1915 | id: 478
1916 | frame_id: tag_478
1917 | size: 0.16
1918 | -
1919 | id: 479
1920 | frame_id: tag_479
1921 | size: 0.16
1922 | -
1923 | id: 480
1924 | frame_id: tag_480
1925 | size: 0.16
1926 | -
1927 | id: 481
1928 | frame_id: tag_481
1929 | size: 0.16
1930 | -
1931 | id: 482
1932 | frame_id: tag_482
1933 | size: 0.16
1934 | -
1935 | id: 483
1936 | frame_id: tag_483
1937 | size: 0.16
1938 | -
1939 | id: 484
1940 | frame_id: tag_484
1941 | size: 0.16
1942 | -
1943 | id: 485
1944 | frame_id: tag_485
1945 | size: 0.16
1946 | -
1947 | id: 486
1948 | frame_id: tag_486
1949 | size: 0.16
1950 | -
1951 | id: 487
1952 | frame_id: tag_487
1953 | size: 0.16
1954 | -
1955 | id: 488
1956 | frame_id: tag_488
1957 | size: 0.16
1958 | -
1959 | id: 489
1960 | frame_id: tag_489
1961 | size: 0.16
1962 | -
1963 | id: 490
1964 | frame_id: tag_490
1965 | size: 0.16
1966 | -
1967 | id: 491
1968 | frame_id: tag_491
1969 | size: 0.16
1970 | -
1971 | id: 492
1972 | frame_id: tag_492
1973 | size: 0.16
1974 | -
1975 | id: 493
1976 | frame_id: tag_493
1977 | size: 0.16
1978 | -
1979 | id: 494
1980 | frame_id: tag_494
1981 | size: 0.16
1982 | -
1983 | id: 495
1984 | frame_id: tag_495
1985 | size: 0.16
1986 | -
1987 | id: 496
1988 | frame_id: tag_496
1989 | size: 0.16
1990 | -
1991 | id: 497
1992 | frame_id: tag_497
1993 | size: 0.16
1994 | -
1995 | id: 498
1996 | frame_id: tag_498
1997 | size: 0.16
1998 | -
1999 | id: 499
2000 | frame_id: tag_499
2001 | size: 0.16
2002 | -
2003 | id: 500
2004 | frame_id: tag_500
2005 | size: 0.16
2006 | -
2007 | id: 501
2008 | frame_id: tag_501
2009 | size: 0.16
2010 | -
2011 | id: 502
2012 | frame_id: tag_502
2013 | size: 0.16
2014 | -
2015 | id: 503
2016 | frame_id: tag_503
2017 | size: 0.16
2018 | -
2019 | id: 504
2020 | frame_id: tag_504
2021 | size: 0.16
2022 | -
2023 | id: 505
2024 | frame_id: tag_505
2025 | size: 0.16
2026 | -
2027 | id: 506
2028 | frame_id: tag_506
2029 | size: 0.16
2030 | -
2031 | id: 507
2032 | frame_id: tag_507
2033 | size: 0.16
2034 | -
2035 | id: 508
2036 | frame_id: tag_508
2037 | size: 0.16
2038 | -
2039 | id: 509
2040 | frame_id: tag_509
2041 | size: 0.16
2042 | -
2043 | id: 510
2044 | frame_id: tag_510
2045 | size: 0.16
2046 | -
2047 | id: 511
2048 | frame_id: tag_511
2049 | size: 0.16
2050 | -
2051 | id: 512
2052 | frame_id: tag_512
2053 | size: 0.16
2054 | -
2055 | id: 513
2056 | frame_id: tag_513
2057 | size: 0.16
2058 | -
2059 | id: 514
2060 | frame_id: tag_514
2061 | size: 0.16
2062 | -
2063 | id: 515
2064 | frame_id: tag_515
2065 | size: 0.16
2066 | -
2067 | id: 516
2068 | frame_id: tag_516
2069 | size: 0.16
2070 | -
2071 | id: 517
2072 | frame_id: tag_517
2073 | size: 0.16
2074 | -
2075 | id: 518
2076 | frame_id: tag_518
2077 | size: 0.16
2078 | -
2079 | id: 519
2080 | frame_id: tag_519
2081 | size: 0.16
2082 | -
2083 | id: 520
2084 | frame_id: tag_520
2085 | size: 0.16
2086 | -
2087 | id: 521
2088 | frame_id: tag_521
2089 | size: 0.16
2090 | -
2091 | id: 522
2092 | frame_id: tag_522
2093 | size: 0.16
2094 | -
2095 | id: 523
2096 | frame_id: tag_523
2097 | size: 0.16
2098 | -
2099 | id: 524
2100 | frame_id: tag_524
2101 | size: 0.16
2102 | -
2103 | id: 525
2104 | frame_id: tag_525
2105 | size: 0.16
2106 | -
2107 | id: 526
2108 | frame_id: tag_526
2109 | size: 0.16
2110 | -
2111 | id: 527
2112 | frame_id: tag_527
2113 | size: 0.16
2114 | -
2115 | id: 528
2116 | frame_id: tag_528
2117 | size: 0.16
2118 | -
2119 | id: 529
2120 | frame_id: tag_529
2121 | size: 0.16
2122 | -
2123 | id: 530
2124 | frame_id: tag_530
2125 | size: 0.16
2126 | -
2127 | id: 531
2128 | frame_id: tag_531
2129 | size: 0.16
2130 | -
2131 | id: 532
2132 | frame_id: tag_532
2133 | size: 0.16
2134 | -
2135 | id: 533
2136 | frame_id: tag_533
2137 | size: 0.16
2138 | -
2139 | id: 534
2140 | frame_id: tag_534
2141 | size: 0.16
2142 | -
2143 | id: 535
2144 | frame_id: tag_535
2145 | size: 0.16
2146 | -
2147 | id: 536
2148 | frame_id: tag_536
2149 | size: 0.16
2150 | -
2151 | id: 537
2152 | frame_id: tag_537
2153 | size: 0.16
2154 | -
2155 | id: 538
2156 | frame_id: tag_538
2157 | size: 0.16
2158 | -
2159 | id: 539
2160 | frame_id: tag_539
2161 | size: 0.16
2162 | -
2163 | id: 540
2164 | frame_id: tag_540
2165 | size: 0.16
2166 | -
2167 | id: 541
2168 | frame_id: tag_541
2169 | size: 0.16
2170 | -
2171 | id: 542
2172 | frame_id: tag_542
2173 | size: 0.16
2174 | -
2175 | id: 543
2176 | frame_id: tag_543
2177 | size: 0.16
2178 | -
2179 | id: 544
2180 | frame_id: tag_544
2181 | size: 0.16
2182 | -
2183 | id: 545
2184 | frame_id: tag_545
2185 | size: 0.16
2186 | -
2187 | id: 546
2188 | frame_id: tag_546
2189 | size: 0.16
2190 | -
2191 | id: 547
2192 | frame_id: tag_547
2193 | size: 0.16
2194 | -
2195 | id: 548
2196 | frame_id: tag_548
2197 | size: 0.16
2198 | -
2199 | id: 549
2200 | frame_id: tag_549
2201 | size: 0.16
2202 | -
2203 | id: 550
2204 | frame_id: tag_550
2205 | size: 0.16
2206 | -
2207 | id: 551
2208 | frame_id: tag_551
2209 | size: 0.16
2210 | -
2211 | id: 552
2212 | frame_id: tag_552
2213 | size: 0.16
2214 | -
2215 | id: 553
2216 | frame_id: tag_553
2217 | size: 0.16
2218 | -
2219 | id: 554
2220 | frame_id: tag_554
2221 | size: 0.16
2222 | -
2223 | id: 555
2224 | frame_id: tag_555
2225 | size: 0.16
2226 | -
2227 | id: 556
2228 | frame_id: tag_556
2229 | size: 0.16
2230 | -
2231 | id: 557
2232 | frame_id: tag_557
2233 | size: 0.16
2234 | -
2235 | id: 558
2236 | frame_id: tag_558
2237 | size: 0.16
2238 | -
2239 | id: 559
2240 | frame_id: tag_559
2241 | size: 0.16
2242 | -
2243 | id: 560
2244 | frame_id: tag_560
2245 | size: 0.16
2246 | -
2247 | id: 561
2248 | frame_id: tag_561
2249 | size: 0.16
2250 | -
2251 | id: 562
2252 | frame_id: tag_562
2253 | size: 0.16
2254 | -
2255 | id: 563
2256 | frame_id: tag_563
2257 | size: 0.16
2258 | -
2259 | id: 564
2260 | frame_id: tag_564
2261 | size: 0.16
2262 | -
2263 | id: 565
2264 | frame_id: tag_565
2265 | size: 0.16
2266 | -
2267 | id: 566
2268 | frame_id: tag_566
2269 | size: 0.16
2270 | -
2271 | id: 567
2272 | frame_id: tag_567
2273 | size: 0.16
2274 | -
2275 | id: 568
2276 | frame_id: tag_568
2277 | size: 0.16
2278 | -
2279 | id: 569
2280 | frame_id: tag_569
2281 | size: 0.16
2282 | -
2283 | id: 570
2284 | frame_id: tag_570
2285 | size: 0.16
2286 | -
2287 | id: 571
2288 | frame_id: tag_571
2289 | size: 0.16
2290 | -
2291 | id: 572
2292 | frame_id: tag_572
2293 | size: 0.16
2294 | -
2295 | id: 573
2296 | frame_id: tag_573
2297 | size: 0.16
2298 | -
2299 | id: 574
2300 | frame_id: tag_574
2301 | size: 0.16
2302 | -
2303 | id: 575
2304 | frame_id: tag_575
2305 | size: 0.16
2306 | -
2307 | id: 576
2308 | frame_id: tag_576
2309 | size: 0.16
2310 | -
2311 | id: 577
2312 | frame_id: tag_577
2313 | size: 0.16
2314 | -
2315 | id: 578
2316 | frame_id: tag_578
2317 | size: 0.16
2318 | -
2319 | id: 579
2320 | frame_id: tag_579
2321 | size: 0.16
2322 | -
2323 | id: 580
2324 | frame_id: tag_580
2325 | size: 0.16
2326 | -
2327 | id: 581
2328 | frame_id: tag_581
2329 | size: 0.16
2330 | -
2331 | id: 582
2332 | frame_id: tag_582
2333 | size: 0.16
2334 | -
2335 | id: 583
2336 | frame_id: tag_583
2337 | size: 0.16
2338 | -
2339 | id: 584
2340 | frame_id: tag_584
2341 | size: 0.16
2342 | -
2343 | id: 585
2344 | frame_id: tag_585
2345 | size: 0.16
2346 | -
2347 | id: 586
2348 | frame_id: tag_586
2349 | size: 0.16
2350 |
--------------------------------------------------------------------------------
76 |
77 | To check that the parameters defined in the tag\_sizes.yaml file were loaded into the param server type:
78 | `$ rosparam get /apriltag_detector/tag_descriptions`
79 |
80 | To look at the numeric values of a transform between the map frame and any specific AR marker tag:
81 | `$ rosrun tf tf_echo map tag_0`
82 | or visualize the complete tf tree using RQT:
83 | `$ rosrun rqt_tf_tree rqt_tf_tree`
84 |
85 | If you would like the apriltag_robot_pose node to display output at the DEBUG verbosity level use:
86 | `$ rosservice call /apriltag_robot_pose/set_logger_level "{logger: 'rosout', level: 'debug'}"`
87 |
88 | ## Troubleshooting
89 | + Gazebo is crashing as it is starting up: Usually, it is enough to run it again (probably several times).
90 | + ImportError No module named apriltags.msg: When using custom messages, make sure the packages containing them have been compiled.
91 | + ERROR: cannot launch node of type [map_server/map_server]: map_server
92 | You have to install map_server first: `$ sudo apt install ros-kinetic-map-server`
93 |
94 | This package has only been tested on Ubuntu 16.04 LTS with ROS Kinetic and Gazebo 7.15.
95 |
96 | ## Further Improvements
97 | + Averaging quaternions is not straightforward. At the moment the robot's estimated orientation, when several AR markers are detected, is the orientation of the first detected marker.
98 | One could do a SLERP to average two quaternions from two (closest) detected markers for a better robot's orientation estimation. See: https://github.com/danielduberg/safe_flight/issues/1
99 |
100 | ## Resources
101 | + http://wiki.ros.org/tf2/Tutorials/Writing%20a%20tf2%20broadcaster%20%28Python%29
102 | + The general relationship between the map, odom and base\_link frames is already described in [Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html).
103 | + [Average of Quaternions](https://stackoverflow.com/questions/12374087/average-of-multiple-quaternions/)
104 | + https://github.com/lucien386/DJISummerCamp2019/blob/master/ROS_Ws/src/sc_localization/odom_update_node.cpp
105 |
--------------------------------------------------------------------------------
/CMakeLists.txt:
--------------------------------------------------------------------------------
1 | cmake_minimum_required(VERSION 2.8.3)
2 | project(apriltag_robot_pose)
3 |
4 | ## Compile as C++11, supported in ROS Kinetic and newer
5 | # add_compile_options(-std=c++11)
6 |
7 | ## Find catkin macros and libraries
8 | ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
9 | ## is used, also find other catkin packages
10 | find_package(catkin REQUIRED COMPONENTS
11 | rospy
12 | tf
13 | )
14 |
15 | ## System dependencies are found with CMake's conventions
16 | # find_package(Boost REQUIRED COMPONENTS system)
17 |
18 |
19 | ## Uncomment this if the package has a setup.py. This macro ensures
20 | ## modules and global scripts declared therein get installed
21 | ## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
22 | # catkin_python_setup()
23 |
24 | ################################################
25 | ## Declare ROS messages, services and actions ##
26 | ################################################
27 |
28 | ## To declare and build messages, services or actions from within this
29 | ## package, follow these steps:
30 | ## * Let MSG_DEP_SET be the set of packages whose message types you use in
31 | ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
32 | ## * In the file package.xml:
33 | ## * add a build_depend tag for "message_generation"
34 | ## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
35 | ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
36 | ## but can be declared for certainty nonetheless:
37 | ## * add a exec_depend tag for "message_runtime"
38 | ## * In this file (CMakeLists.txt):
39 | ## * add "message_generation" and every package in MSG_DEP_SET to
40 | ## find_package(catkin REQUIRED COMPONENTS ...)
41 | ## * add "message_runtime" and every package in MSG_DEP_SET to
42 | ## catkin_package(CATKIN_DEPENDS ...)
43 | ## * uncomment the add_*_files sections below as needed
44 | ## and list every .msg/.srv/.action file to be processed
45 | ## * uncomment the generate_messages entry below
46 | ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
47 |
48 | ## Generate messages in the 'msg' folder
49 | # add_message_files(
50 | # FILES
51 | # Message1.msg
52 | # Message2.msg
53 | # )
54 |
55 | ## Generate services in the 'srv' folder
56 | # add_service_files(
57 | # FILES
58 | # Service1.srv
59 | # Service2.srv
60 | # )
61 |
62 | ## Generate actions in the 'action' folder
63 | # add_action_files(
64 | # FILES
65 | # Action1.action
66 | # Action2.action
67 | # )
68 |
69 | ## Generate added messages and services with any dependencies listed here
70 | # generate_messages(
71 | # DEPENDENCIES
72 | # std_msgs # Or other packages containing msgs
73 | # )
74 |
75 | ################################################
76 | ## Declare ROS dynamic reconfigure parameters ##
77 | ################################################
78 |
79 | ## To declare and build dynamic reconfigure parameters within this
80 | ## package, follow these steps:
81 | ## * In the file package.xml:
82 | ## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
83 | ## * In this file (CMakeLists.txt):
84 | ## * add "dynamic_reconfigure" to
85 | ## find_package(catkin REQUIRED COMPONENTS ...)
86 | ## * uncomment the "generate_dynamic_reconfigure_options" section below
87 | ## and list every .cfg file to be processed
88 |
89 | ## Generate dynamic reconfigure parameters in the 'cfg' folder
90 | # generate_dynamic_reconfigure_options(
91 | # cfg/DynReconf1.cfg
92 | # cfg/DynReconf2.cfg
93 | # )
94 |
95 | ###################################
96 | ## catkin specific configuration ##
97 | ###################################
98 | ## The catkin_package macro generates cmake config files for your package
99 | ## Declare things to be passed to dependent projects
100 | ## INCLUDE_DIRS: uncomment this if your package contains header files
101 | ## LIBRARIES: libraries you create in this project that dependent projects also need
102 | ## CATKIN_DEPENDS: catkin_packages dependent projects also need
103 | ## DEPENDS: system dependencies of this project that dependent projects also need
104 | catkin_package(
105 | # INCLUDE_DIRS include
106 | # LIBRARIES apriltag_robot_pose
107 | # CATKIN_DEPENDS rospy tf
108 | # DEPENDS system_lib
109 | )
110 |
111 | ###########
112 | ## Build ##
113 | ###########
114 |
115 | ## Specify additional locations of header files
116 | ## Your package locations should be listed before other locations
117 | include_directories(
118 | # include
119 | ${catkin_INCLUDE_DIRS}
120 | )
121 |
122 | ## Declare a C++ library
123 | # add_library(${PROJECT_NAME}
124 | # src/${PROJECT_NAME}/apriltag_robot_pose.cpp
125 | # )
126 |
127 | ## Add cmake target dependencies of the library
128 | ## as an example, code may need to be generated before libraries
129 | ## either from message generation or dynamic reconfigure
130 | # add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
131 |
132 | ## Declare a C++ executable
133 | ## With catkin_make all packages are built within a single CMake context
134 | ## The recommended prefix ensures that target names across packages don't collide
135 | # add_executable(${PROJECT_NAME}_node src/apriltag_robot_pose_node.cpp)
136 |
137 | ## Rename C++ executable without prefix
138 | ## The above recommended prefix causes long target names, the following renames the
139 | ## target back to the shorter version for ease of user use
140 | ## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
141 | # set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
142 |
143 | ## Add cmake target dependencies of the executable
144 | ## same as for the library above
145 | # add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
146 |
147 | ## Specify libraries to link a library or executable target against
148 | # target_link_libraries(${PROJECT_NAME}_node
149 | # ${catkin_LIBRARIES}
150 | # )
151 |
152 | #############
153 | ## Install ##
154 | #############
155 |
156 | # all install targets should use catkin DESTINATION variables
157 | # See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
158 |
159 | ## Mark executable scripts (Python etc.) for installation
160 | ## in contrast to setup.py, you can choose the destination
161 | # install(PROGRAMS
162 | # scripts/my_python_script
163 | # DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
164 | # )
165 |
166 | ## Mark executables and/or libraries for installation
167 | # install(TARGETS ${PROJECT_NAME} ${PROJECT_NAME}_node
168 | # ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
169 | # LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
170 | # RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
171 | # )
172 |
173 | ## Mark cpp header files for installation
174 | # install(DIRECTORY include/${PROJECT_NAME}/
175 | # DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
176 | # FILES_MATCHING PATTERN "*.h"
177 | # PATTERN ".svn" EXCLUDE
178 | # )
179 |
180 | ## Mark other files for installation (e.g. launch and bag files, etc.)
181 | # install(FILES
182 | # # myfile1
183 | # # myfile2
184 | # DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
185 | # )
186 |
187 | #############
188 | ## Testing ##
189 | #############
190 |
191 | ## Add gtest based cpp test target and link libraries
192 | # catkin_add_gtest(${PROJECT_NAME}-test test/test_apriltag_robot_pose.cpp)
193 | # if(TARGET ${PROJECT_NAME}-test)
194 | # target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
195 | # endif()
196 |
197 | ## Add folders to be run by python nosetests
198 | # catkin_add_nosetests(test)
199 |
--------------------------------------------------------------------------------
/config/robot_pose.rviz:
--------------------------------------------------------------------------------
1 | Panels:
2 | - Class: rviz/Displays
3 | Help Height: 78
4 | Name: Displays
5 | Property Tree Widget:
6 | Expanded:
7 | - /Global Options1
8 | - /Status1
9 | Splitter Ratio: 0.5
10 | Tree Height: 743
11 | - Class: rviz/Selection
12 | Name: Selection
13 | - Class: rviz/Tool Properties
14 | Expanded:
15 | - /2D Pose Estimate1
16 | - /2D Nav Goal1
17 | - /Publish Point1
18 | Name: Tool Properties
19 | Splitter Ratio: 0.588679016
20 | - Class: rviz/Views
21 | Expanded:
22 | - /Current View1
23 | Name: Views
24 | Splitter Ratio: 0.5
25 | - Class: rviz/Time
26 | Experimental: false
27 | Name: Time
28 | SyncMode: 0
29 | SyncSource: ""
30 | Toolbars:
31 | toolButtonStyle: 2
32 | Visualization Manager:
33 | Class: ""
34 | Displays:
35 | - Alpha: 0.5
36 | Cell Size: 1
37 | Class: rviz/Grid
38 | Color: 160; 160; 164
39 | Enabled: true
40 | Line Style:
41 | Line Width: 0.0299999993
42 | Value: Lines
43 | Name: Grid
44 | Normal Cell Count: 0
45 | Offset:
46 | X: 0
47 | Y: 0
48 | Z: 0
49 | Plane: XY
50 | Plane Cell Count: 10
51 | Reference Frame:
52 | Value: true
53 | - Class: rviz/TF
54 | Enabled: true
55 | Frame Timeout: 15
56 | Frames:
57 | All Enabled: true
58 | camera:
59 | Value: true
60 | chassis:
61 | Value: true
62 | hokuyo:
63 | Value: true
64 | left_wheel:
65 | Value: true
66 | map:
67 | Value: true
68 | odom:
69 | Value: true
70 | right_wheel:
71 | Value: true
72 | robot_footprint:
73 | Value: true
74 | tag_0:
75 | Value: true
76 | tag_1:
77 | Value: true
78 | tag_111:
79 | Value: true
80 | tag_113:
81 | Value: true
82 | tag_115:
83 | Value: true
84 | tag_117:
85 | Value: true
86 | tag_119:
87 | Value: true
88 | tag_121:
89 | Value: true
90 | tag_16:
91 | Value: true
92 | tag_17:
93 | Value: true
94 | tag_18:
95 | Value: true
96 | tag_19:
97 | Value: true
98 | tag_2:
99 | Value: true
100 | tag_3:
101 | Value: true
102 | tag_30:
103 | Value: true
104 | tag_300:
105 | Value: true
106 | tag_301:
107 | Value: true
108 | tag_302:
109 | Value: true
110 | tag_303:
111 | Value: true
112 | tag_304:
113 | Value: true
114 | tag_305:
115 | Value: true
116 | tag_31:
117 | Value: true
118 | tag_310:
119 | Value: true
120 | tag_311:
121 | Value: true
122 | tag_314:
123 | Value: true
124 | tag_315:
125 | Value: true
126 | tag_316:
127 | Value: true
128 | tag_317:
129 | Value: true
130 | tag_32:
131 | Value: true
132 | tag_33:
133 | Value: true
134 | tag_332:
135 | Value: true
136 | tag_333:
137 | Value: true
138 | tag_336:
139 | Value: true
140 | tag_337:
141 | Value: true
142 | tag_338:
143 | Value: true
144 | tag_339:
145 | Value: true
146 | tag_350:
147 | Value: true
148 | tag_351:
149 | Value: true
150 | tag_352:
151 | Value: true
152 | tag_353:
153 | Value: true
154 | tag_374:
155 | Value: true
156 | tag_375:
157 | Value: true
158 | tag_394:
159 | Value: true
160 | tag_395:
161 | Value: true
162 | tag_398:
163 | Value: true
164 | tag_399:
165 | Value: true
166 | tag_4:
167 | Value: true
168 | tag_400:
169 | Value: true
170 | tag_401:
171 | Value: true
172 | tag_411:
173 | Value: true
174 | tag_413:
175 | Value: true
176 | tag_415:
177 | Value: true
178 | tag_417:
179 | Value: true
180 | tag_419:
181 | Value: true
182 | tag_421:
183 | Value: true
184 | tag_5:
185 | Value: true
186 | tag_54:
187 | Value: true
188 | tag_55:
189 | Value: true
190 | tag_58:
191 | Value: true
192 | tag_59:
193 | Value: true
194 | tag_60:
195 | Value: true
196 | tag_61:
197 | Value: true
198 | tag_76:
199 | Value: true
200 | tag_77:
201 | Value: true
202 | tag_78:
203 | Value: true
204 | tag_79:
205 | Value: true
206 | tag_92:
207 | Value: true
208 | tag_93:
209 | Value: true
210 | tag_94:
211 | Value: true
212 | tag_95:
213 | Value: true
214 | tag_96:
215 | Value: true
216 | tag_97:
217 | Value: true
218 | Marker Scale: 1
219 | Name: TF
220 | Show Arrows: true
221 | Show Axes: true
222 | Show Names: true
223 | Tree:
224 | map:
225 | odom:
226 | robot_footprint:
227 | chassis:
228 | camera:
229 | {}
230 | hokuyo:
231 | {}
232 | left_wheel:
233 | {}
234 | right_wheel:
235 | {}
236 | tag_0:
237 | {}
238 | tag_1:
239 | {}
240 | tag_111:
241 | {}
242 | tag_113:
243 | {}
244 | tag_115:
245 | {}
246 | tag_117:
247 | {}
248 | tag_119:
249 | {}
250 | tag_121:
251 | {}
252 | tag_16:
253 | {}
254 | tag_17:
255 | {}
256 | tag_18:
257 | {}
258 | tag_19:
259 | {}
260 | tag_2:
261 | {}
262 | tag_3:
263 | {}
264 | tag_30:
265 | {}
266 | tag_300:
267 | {}
268 | tag_301:
269 | {}
270 | tag_302:
271 | {}
272 | tag_303:
273 | {}
274 | tag_304:
275 | {}
276 | tag_305:
277 | {}
278 | tag_31:
279 | {}
280 | tag_310:
281 | {}
282 | tag_311:
283 | {}
284 | tag_314:
285 | {}
286 | tag_315:
287 | {}
288 | tag_316:
289 | {}
290 | tag_317:
291 | {}
292 | tag_32:
293 | {}
294 | tag_33:
295 | {}
296 | tag_332:
297 | {}
298 | tag_333:
299 | {}
300 | tag_336:
301 | {}
302 | tag_337:
303 | {}
304 | tag_338:
305 | {}
306 | tag_339:
307 | {}
308 | tag_350:
309 | {}
310 | tag_351:
311 | {}
312 | tag_352:
313 | {}
314 | tag_353:
315 | {}
316 | tag_374:
317 | {}
318 | tag_375:
319 | {}
320 | tag_394:
321 | {}
322 | tag_395:
323 | {}
324 | tag_398:
325 | {}
326 | tag_399:
327 | {}
328 | tag_4:
329 | {}
330 | tag_400:
331 | {}
332 | tag_401:
333 | {}
334 | tag_411:
335 | {}
336 | tag_413:
337 | {}
338 | tag_415:
339 | {}
340 | tag_417:
341 | {}
342 | tag_419:
343 | {}
344 | tag_421:
345 | {}
346 | tag_5:
347 | {}
348 | tag_54:
349 | {}
350 | tag_55:
351 | {}
352 | tag_58:
353 | {}
354 | tag_59:
355 | {}
356 | tag_60:
357 | {}
358 | tag_61:
359 | {}
360 | tag_76:
361 | {}
362 | tag_77:
363 | {}
364 | tag_78:
365 | {}
366 | tag_79:
367 | {}
368 | tag_92:
369 | {}
370 | tag_93:
371 | {}
372 | tag_94:
373 | {}
374 | tag_95:
375 | {}
376 | tag_96:
377 | {}
378 | tag_97:
379 | {}
380 | Update Interval: 0
381 | Value: true
382 | - Alpha: 1
383 | Class: rviz/RobotModel
384 | Collision Enabled: false
385 | Enabled: true
386 | Links:
387 | All Links Enabled: true
388 | Expand Joint Details: false
389 | Expand Link Details: false
390 | Expand Tree: false
391 | Link Tree Style: Links in Alphabetic Order
392 | camera:
393 | Alpha: 1
394 | Show Axes: false
395 | Show Trail: false
396 | Value: true
397 | chassis:
398 | Alpha: 1
399 | Show Axes: false
400 | Show Trail: false
401 | Value: true
402 | hokuyo:
403 | Alpha: 1
404 | Show Axes: false
405 | Show Trail: false
406 | Value: true
407 | left_wheel:
408 | Alpha: 1
409 | Show Axes: false
410 | Show Trail: false
411 | Value: true
412 | right_wheel:
413 | Alpha: 1
414 | Show Axes: false
415 | Show Trail: false
416 | Value: true
417 | robot_footprint:
418 | Alpha: 1
419 | Show Axes: false
420 | Show Trail: false
421 | Name: RobotModel
422 | Robot Description: robot_description
423 | TF Prefix: ""
424 | Update Interval: 0
425 | Value: true
426 | Visual Enabled: true
427 | - Alpha: 0.699999988
428 | Class: rviz/Map
429 | Color Scheme: map
430 | Draw Behind: false
431 | Enabled: true
432 | Name: Map
433 | Topic: /map
434 | Unreliable: false
435 | Use Timestamp: false
436 | Value: true
437 | Enabled: true
438 | Global Options:
439 | Background Color: 48; 48; 48
440 | Default Light: true
441 | Fixed Frame: map
442 | Frame Rate: 30
443 | Name: root
444 | Tools:
445 | - Class: rviz/Interact
446 | Hide Inactive Objects: true
447 | - Class: rviz/MoveCamera
448 | - Class: rviz/Select
449 | - Class: rviz/FocusCamera
450 | - Class: rviz/Measure
451 | - Class: rviz/SetInitialPose
452 | Topic: /initialpose
453 | - Class: rviz/SetGoal
454 | Topic: /move_base_simple/goal
455 | - Class: rviz/PublishPoint
456 | Single click: true
457 | Topic: /clicked_point
458 | Value: true
459 | Views:
460 | Current:
461 | Class: rviz/Orbit
462 | Distance: 8.72745323
463 | Enable Stereo Rendering:
464 | Stereo Eye Separation: 0.0599999987
465 | Stereo Focal Distance: 1
466 | Swap Stereo Eyes: false
467 | Value: false
468 | Focal Point:
469 | X: 0.461928636
470 | Y: 0.215806082
471 | Z: 0.33352679
472 | Focal Shape Fixed Size: true
473 | Focal Shape Size: 0.0500000007
474 | Invert Z Axis: false
475 | Name: Current View
476 | Near Clip Distance: 0.00999999978
477 | Pitch: 0.525398076
478 | Target Frame:
479 | Value: Orbit (rviz)
480 | Yaw: 4.21358395
481 | Saved: ~
482 | Window Geometry:
483 | Displays:
484 | collapsed: false
485 | Height: 1031
486 | Hide Left Dock: false
487 | Hide Right Dock: false
488 | QMainWindow State: 000000ff00000000fd0000000400000000000001860000036ffc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003a0000036f000000c600fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f0000036ffc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003a0000036f0000009e00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d00650100000000000007800000024400fffffffb0000000800540069006d00650100000000000004500000000000000000000004df0000036f00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
489 | Selection:
490 | collapsed: false
491 | Time:
492 | collapsed: false
493 | Tool Properties:
494 | collapsed: false
495 | Views:
496 | collapsed: false
497 | Width: 1920
498 | X: 0
499 | Y: 0
500 |
--------------------------------------------------------------------------------
/scripts/robot_pose.py:
--------------------------------------------------------------------------------
1 | #!/usr/bin/python
2 |
3 | # Estimates the absolute pose a robot in a map based on the position of the AprilTag markers in the robot's camera field of view
4 | # Broadcasts the transform of odom w.r.t. map to correct odometry drift
5 | # Author: Roberto Zegers R.
6 | # Date: 2019 July
7 |
8 | import rospy
9 | from apriltags_ros.msg import AprilTagDetection, AprilTagDetectionArray
10 | from geometry_msgs.msg import Pose, PoseStamped, TransformStamped, Point, Quaternion
11 | from tf.transformations import quaternion_from_euler, euler_from_quaternion, translation_from_matrix, quaternion_from_matrix, compose_matrix, quaternion_matrix, rotation_matrix
12 | import numpy as np
13 | import tf2_ros
14 | import tf2_geometry_msgs
15 |
16 | ## Global variables
17 | nrTfRetrys = 1
18 | retryTime = 0.05
19 | rospy.init_node('apriltag_robot_pose', log_level=rospy.INFO, anonymous=False)
20 |
21 | # Initializes a tf2 listener
22 | tf_buffer = tf2_ros.Buffer(rospy.Duration(10.0)) #tf buffer length
23 | tf_listener = tf2_ros.TransformListener(tf_buffer)
24 |
25 | # Initializes a tf2 broadcaster for our map(parent)->odom(child) == odom w.r.t. map transform
26 | br_odom_wrt_map = tf2_ros.TransformBroadcaster()
27 |
28 | # Initializes an empty TransformStamped object for our map(parent)->odom(child) == odom w.r.t. map transform
29 | ts_odom_wrt_map = TransformStamped()
30 |
31 | r = rospy.Rate(10) # 10hz
32 |
33 | # Initializes an empty PoseStamped object the pose of the robot_base w.r.t map
34 | robot_pose = PoseStamped()
35 |
36 | new_translation = []
37 | new_rotation = []
38 |
39 | def strip_forward_slash(frame_id):
40 | '''
41 | Removes forward slash for tf2 to work
42 | '''
43 | if frame_id[0] == "/":
44 | new_frame_id = frame_id[1:]
45 | else:
46 | new_frame_id = frame_id
47 | return new_frame_id
48 |
49 | # get the robot's base frame
50 | if rospy.has_param("~base_frame"):
51 | # forward slash must be removed to work with tf2
52 | base_frame = strip_forward_slash(rospy.get_param("~base_frame"))
53 | else:
54 | base_frame = "base_footprint"
55 | rospy.logwarn("base_footprint frame is set to default: base_footprint")
56 |
57 | # get odom frame, the (noisy) odometry
58 | if rospy.has_param("~odom_frame"):
59 | odom_frame = strip_forward_slash(rospy.get_param("~odom_frame"))
60 | else:
61 | odom_frame = "odom"
62 | rospy.logwarn("odometry frame of reference is set to default: odom")
63 |
64 | # get world_fixed_frame
65 | if rospy.has_param("~world_fixed_frame"):
66 | world_fixed_frame = strip_forward_slash(rospy.get_param("~world_fixed_frame"))
67 | else:
68 | world_fixed_frame = "map"
69 | rospy.logwarn("world_fixed_frame frame is set to default: map")
70 |
71 | # get the camera frame
72 | if rospy.has_param("~camera_frame"):
73 | camera_frame = strip_forward_slash(rospy.get_param("~camera_frame"))
74 | else:
75 | camera_frame = "camera"
76 | rospy.logwarn("camera frame of reference is set to default: camera")
77 |
78 | def main():
79 | rospy.Subscriber("/tag_detections", AprilTagDetectionArray, apriltag_callback, queue_size = 1)
80 | rospy.loginfo("Started node to broadcast odom wrt map transform!")
81 | # get base w.r.t. odom transform
82 | while not rospy.is_shutdown():
83 | try:
84 | # Look for the odom->base_footprint transform
85 | rospy.logdebug("Looking for the odom->robot_footprint transform")
86 | ts_base_wrt_odom = tf_buffer.lookup_transform(odom_frame, base_frame, rospy.Time(), rospy.Duration(1.0)) # wait 1s for transform to become available
87 | rospy.logdebug("ts_base_wrt_odom: %s", ts_base_wrt_odom)
88 | # note: robot_pose (base_frame wrt map) is calculated every time the subscriber callback is executed
89 | broadcast_last_transform()
90 | except (tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException), ex:
91 | rospy.logerr(ex)
92 | r.sleep()
93 |
94 | def pose2poselist(pose):
95 | ''' Transforms a pose object into the form of a python list'''
96 | return [pose.pose.position.x, pose.pose.position.y, pose.pose.position.z, pose.pose.orientation.x, pose.pose.orientation.y, pose.pose.orientation.z, pose.pose.orientation.w]
97 |
98 | def transformPose(pose, sourceFrame, target_frame):
99 | '''
100 | Converts a pose represented as a list in the source_frame
101 | to a pose represented as a list in the target_frame
102 | '''
103 | _pose = PoseStamped()
104 | _pose.header.frame_id = sourceFrame
105 | if len(pose) == 6:
106 | pose.append(0)
107 | pose[3:7] = quaternion_from_euler(pose[3], pose[4], pose[5]).tolist()
108 |
109 | _pose.pose.position.x = pose[0]
110 | _pose.pose.position.y = pose[1]
111 | _pose.pose.position.z = pose[2]
112 | _pose.pose.orientation.x = pose[3]
113 | _pose.pose.orientation.y = pose[4]
114 | _pose.pose.orientation.z = pose[5]
115 | _pose.pose.orientation.w = pose[6]
116 |
117 | for i in range(nrTfRetrys):
118 | try:
119 | t = rospy.Time(0)
120 | _pose.header.stamp = t
121 | # converts a Pose object from its reference frame to a Pose object in the frame target_frame
122 | transform = tf_buffer.lookup_transform(target_frame,
123 | _pose.header.frame_id, #source frame is the current object's frame of reference
124 | rospy.Time(0), #get the tf at first available time
125 | rospy.Duration(1.0)) #wait for 1 second
126 | pose_transformed = tf2_geometry_msgs.do_transform_pose(_pose, transform)
127 | p = pose_transformed.pose.position
128 | o = pose_transformed.pose.orientation
129 | return [p.x, p.y, p.z, o.x, o.y, o.z, o.w]
130 | except (tf2_ros.LookupException), e1:
131 | print("ERROR: LookupException!")
132 | rospy.logerr(e1)
133 | rospy.logwarn("No tf frame with name %s found. Check that the detected tag ID is part of the transforms that are being broadcasted by the static transform broadcaster.", target_frame)
134 | continue
135 | except (tf2_ros.ConnectivityException), e2:
136 | rospy.logwarn(e2)
137 | rospy.logerr("ERROR: ConnectivityException!")
138 | continue
139 | except (tf2_ros.ExtrapolationException), e3:
140 | rospy.logwarn(e3)
141 | rospy.logerr("ERROR: ExtrapolationException!")
142 | continue
143 | except Exception as e4:
144 | rospy.logwarn(e4)
145 | rospy.logerr("Unexpected error when transforming Pose")
146 | finally:
147 | rospy.sleep(retryTime)
148 | return None
149 |
150 | def xyzquat_from_matrix(matrix):
151 | return translation_from_matrix(matrix).tolist() + quaternion_from_matrix(matrix).tolist()
152 |
153 | def matrix_from_xyzquat(arg1, arg2=None):
154 | return matrix_from_xyzquat_np_array(arg1, arg2).tolist()
155 |
156 | def matrix_from_xyzquat_np_array(arg1, arg2=None):
157 | if arg2 is not None:
158 | translate = arg1
159 | quaternion = arg2
160 | else:
161 | translate = arg1[0:3]
162 | quaternion = arg1[3:7]
163 |
164 | return np.dot(compose_matrix(translate=translate),quaternion_matrix(quaternion))
165 |
166 | def invPoselist(poselist):
167 | return xyzquat_from_matrix(np.linalg.inv(matrix_from_xyzquat(poselist)))
168 |
169 | def base_wrt_map_pose(pose=[0,0,0,0,0,0,1], child_frame_id='obj', parent_frame_id = world_fixed_frame, npub=1):
170 | '''
171 | Converts from a representation of a pose as a list to a TransformStamped object (translation and rotation (Quaternion) representation)
172 | Then keeps that as a TransformStamped object
173 | Note:
174 | In Rviz it will be shown as an arrow from the robot base (child) to the map (parent)
175 | In RQT it will be shown as an arrow from the map (parent) to the robot base (child)
176 | '''
177 | global robot_pose
178 | if len(pose) == 7:
179 | quaternion = tuple(pose[3:7])
180 | elif len(pose) == 6:
181 | quaternion = quaternion_from_euler(*pose[3:6])
182 | else:
183 | rospy.logerr("Bad length of pose")
184 | return None
185 |
186 | position = tuple(pose[0:3])
187 | # Fill in PoseStamped object: stamps the transform with the current time
188 | robot_pose.header.stamp = rospy.Time.now()
189 | # Sets the frame ID of the transform to the map frame
190 | robot_pose.header.frame_id = parent_frame_id
191 | # Fill in coordinates
192 | if len(pose) == 6:
193 | pose.append(0)
194 | pose[3:7] = quaternion_from_euler(pose[3], pose[4], pose[5]).tolist()
195 |
196 | robot_pose.pose.position.x = pose[0]
197 | robot_pose.pose.position.y = pose[1]
198 | robot_pose.pose.position.z = 0 # fixate the z value of the robot base to avoid that it jumps up and down, or use pose[2] for the detected value
199 | robot_pose.pose.orientation.x = pose[3]
200 | robot_pose.pose.orientation.y = pose[4]
201 | robot_pose.pose.orientation.z = pose[5]
202 | robot_pose.pose.orientation.w = pose[6]
203 |
204 | def averagePose(pose_list):
205 | '''
206 | Calculates the averge pose from a list of poses
207 | Position is the average of all estimated positions
208 | Orientation uses the orientation of the first detected marker
209 | '''
210 | avg_pose = []
211 | avg_pose.append(np.mean([pose[0] for pose in pose_list]))
212 | avg_pose.append(np.mean([pose[1] for pose in pose_list]))
213 | avg_pose.append(np.mean([pose[2] for pose in pose_list]))
214 | # Use the orientation of the first detected marker
215 | avg_pose.extend(pose_list[0][3:7])
216 | return avg_pose
217 |
218 | def apriltag_callback(data):
219 | # rospy.logdebug(rospy.get_caller_id() + "I heard %s", data)
220 | if data.detections:
221 | poselist_base_wrt_map = []
222 | for detection in data.detections:
223 | tag_id = detection.id # tag id
224 | rospy.logdebug("Tag ID detected: %s \n", tag_id)
225 | child_frame_id = "tag_" + str(tag_id)
226 |
227 | # Convert the deteced tag Pose object to tag pose representation as a list, only for convinience
228 | poselist_tag_wrt_camera = pose2poselist(detection.pose)
229 | rospy.logdebug("poselist_tag_wrt_camera: \n %s \n", poselist_tag_wrt_camera)
230 |
231 | # Calculate transform of tag w.r.t. robot base (in Rviz arrow points from tag (child) to robot base(parent))
232 | poselist_tag_wrt_base = transformPose(poselist_tag_wrt_camera, camera_frame, base_frame)
233 | rospy.logdebug("transformPose(poselist_tag_wrt_camera, 'camera', 'robot_footprint'): \n %s \n", poselist_tag_wrt_base)
234 |
235 | # Calculate transform of robot base w.r.t. tag (in Rviz arrow points from robot base (child) to tag(parent))
236 | poselist_base_wrt_tag = invPoselist(poselist_tag_wrt_base)
237 | rospy.logdebug("invPoselist( poselist_tag_wrt_base): \n %s \n", poselist_base_wrt_tag)
238 |
239 | # Calculate transform of robot base w.r.t. map (in Rviz arrow points from robot base (child) to map (parent)), returns pose of robot in the map coordinates
240 | poselist_base_wrt_map.append(transformPose(poselist_base_wrt_tag, child_frame_id, target_frame = world_fixed_frame))
241 | rospy.logdebug("transformPose(poselist_base_wrt_tag, sourceFrame = '%s', target_frame = 'map'): \n %s \n", child_frame_id, poselist_base_wrt_map[-1])
242 |
243 | #for counter, robot_pose in enumerate(poselist_base_wrt_map):
244 | # rospy.logdebug("\n Robot pose estimation nr. %s: %s \n",str(counter), robot_pose)
245 |
246 | estimated_avg_pose = averagePose(poselist_base_wrt_map)
247 | rospy.logdebug("\n Robot's estimated avg. pose from all AR tags detected:\n %s \n", estimated_avg_pose)
248 |
249 | # Calculate transform of robot base w.r.t. map or pose of robot in the map coordinates
250 | base_wrt_map_pose(pose = estimated_avg_pose, child_frame_id = base_frame, parent_frame_id = world_fixed_frame)
251 |
252 | map_to_odom_transform()
253 |
254 | def convert_pose_inverse_transform(input_pose):
255 | """ Helper method to invert a transform (this is built into the tf C++ classes, but ommitted from Python) """
256 | translation = np.zeros((4,1))
257 | translation[0] = -input_pose.pose.position.x
258 | translation[1] = -input_pose.pose.position.y
259 | translation[2] = -input_pose.pose.position.z
260 | translation[3] = 1.0
261 |
262 | rotation = (input_pose.pose.orientation.x, input_pose.pose.orientation.y, input_pose.pose.orientation.z, input_pose.pose.orientation.w)
263 | euler_angle = euler_from_quaternion(rotation)
264 | rotation = np.transpose(rotation_matrix(euler_angle[2], [0,0,1])) # the angle is a yaw
265 | transformed_translation = rotation.dot(translation)
266 |
267 | translation = (transformed_translation[0], transformed_translation[1], transformed_translation[2])
268 | rotation = quaternion_from_matrix(rotation)
269 | return (translation, rotation)
270 |
271 | def convert_translation_rotation_to_pose(translation, rotation):
272 | """ Convert from representation of a pose as translation and rotation (Quaternion) tuples to a geometry_msgs/Pose message """
273 | return Pose(position=Point(x=translation[0],y=translation[1],z=translation[2]), orientation=Quaternion(x=rotation[0],y=rotation[1],z=rotation[2],w=rotation[3]))
274 |
275 | def map_to_odom_transform():
276 | """ This method constantly updates the offset of the map and
277 | odometry coordinate systems based on the latest results from
278 | the localizer
279 | """
280 | global new_translation, new_rotation
281 | (translation, rotation) = convert_pose_inverse_transform(robot_pose)
282 | map_wrt_base_pose = PoseStamped(pose=convert_translation_rotation_to_pose(translation,rotation))
283 | map_wrt_base_pose.header.stamp=rospy.Time.now()
284 | map_wrt_base_pose.header.frame_id=base_frame
285 | # access/look-up the transform odom (target/new frame) wrt base(source/current frame):
286 | # tf_buffer.lookup_transform(target_frame, source_frame, query_time, timeout_secs)
287 | ts_odom_wrt_base = tf_buffer.lookup_transform(odom_frame, base_frame, rospy.Time(), rospy.Duration(1.0)) # wait 1s for transform to become available
288 | map_wrt_odom_pose = tf2_geometry_msgs.do_transform_pose(map_wrt_base_pose, ts_odom_wrt_base)
289 | # invert map_wrt_odom_to get odom_wrt_map and store as tuple position, quaternion
290 | (new_translation, new_rotation) = convert_pose_inverse_transform(map_wrt_odom_pose)
291 |
292 | def broadcast_last_transform():
293 | """ Make sure that we are always broadcasting the last
294 | map to odom transformation. This is necessary so
295 | move_base can work properly. """
296 | # Sets the frame ID of the transform to the map frame
297 | ts_odom_wrt_map.header.frame_id = world_fixed_frame
298 | # Stamps the transform with the current time
299 | ts_odom_wrt_map.header.stamp = rospy.Time.now()
300 | # Sets the child frame ID to odom
301 | ts_odom_wrt_map.child_frame_id = odom_frame
302 | if new_translation:
303 | # Fill in coordinates
304 | list(new_translation) # convert an np array to an ordinary list
305 | ts_odom_wrt_map.transform.translation.x = new_translation[0][0]
306 | ts_odom_wrt_map.transform.translation.y = new_translation[1][0]
307 | ts_odom_wrt_map.transform.translation.z = new_translation[2][0]
308 | ts_odom_wrt_map.transform.rotation.x = new_rotation[0]
309 | ts_odom_wrt_map.transform.rotation.y = new_rotation[1]
310 | ts_odom_wrt_map.transform.rotation.z = new_rotation[2]
311 | ts_odom_wrt_map.transform.rotation.w = new_rotation[3]
312 | try:
313 | br_odom_wrt_map.sendTransform(ts_odom_wrt_map)
314 | rospy.logdebug("Broadcasted odom wrt map transform!")
315 | except Exception as exc:
316 | rospy.logwarn(exc)
317 | rospy.logerr("Unexpected error in broadcast of map to odom transformation")
318 |
319 | if __name__=='__main__':
320 | main()
321 |
--------------------------------------------------------------------------------
/config/ar_tag_navigation.rviz:
--------------------------------------------------------------------------------
1 | Panels:
2 | - Class: rviz/Displays
3 | Help Height: 78
4 | Name: Displays
5 | Property Tree Widget:
6 | Expanded:
7 | - /Global Options1
8 | - /Status1
9 | - /TF1/Frames1
10 | - /RobotModel1
11 | Splitter Ratio: 0.5
12 | Tree Height: 621
13 | - Class: rviz/Selection
14 | Name: Selection
15 | - Class: rviz/Tool Properties
16 | Expanded:
17 | - /2D Pose Estimate1
18 | - /2D Nav Goal1
19 | - /Publish Point1
20 | Name: Tool Properties
21 | Splitter Ratio: 0.588679016
22 | - Class: rviz/Views
23 | Expanded:
24 | - /Current View1
25 | Name: Views
26 | Splitter Ratio: 0.5
27 | - Class: rviz/Time
28 | Experimental: false
29 | Name: Time
30 | SyncMode: 0
31 | SyncSource: ""
32 | Toolbars:
33 | toolButtonStyle: 2
34 | Visualization Manager:
35 | Class: ""
36 | Displays:
37 | - Alpha: 0.5
38 | Cell Size: 1
39 | Class: rviz/Grid
40 | Color: 160; 160; 164
41 | Enabled: true
42 | Line Style:
43 | Line Width: 0.0299999993
44 | Value: Lines
45 | Name: Grid
46 | Normal Cell Count: 0
47 | Offset:
48 | X: 0
49 | Y: 0
50 | Z: 0
51 | Plane: XY
52 | Plane Cell Count: 10
53 | Reference Frame:
54 | Value: true
55 | - Class: rviz/TF
56 | Enabled: true
57 | Frame Timeout: 15
58 | Frames:
59 | All Enabled: false
60 | camera:
61 | Value: false
62 | camera_tf_frame:
63 | Value: false
64 | chassis:
65 | Value: false
66 | hokuyo:
67 | Value: false
68 | left_wheel:
69 | Value: false
70 | map:
71 | Value: true
72 | odom:
73 | Value: true
74 | right_wheel:
75 | Value: false
76 | robot_footprint:
77 | Value: true
78 | tag_0:
79 | Value: true
80 | tag_1:
81 | Value: true
82 | tag_111:
83 | Value: true
84 | tag_113:
85 | Value: true
86 | tag_115:
87 | Value: true
88 | tag_117:
89 | Value: true
90 | tag_119:
91 | Value: true
92 | tag_121:
93 | Value: true
94 | tag_16:
95 | Value: true
96 | tag_17:
97 | Value: true
98 | tag_18:
99 | Value: true
100 | tag_19:
101 | Value: true
102 | tag_2:
103 | Value: true
104 | tag_3:
105 | Value: true
106 | tag_30:
107 | Value: true
108 | tag_300:
109 | Value: true
110 | tag_301:
111 | Value: true
112 | tag_302:
113 | Value: true
114 | tag_303:
115 | Value: true
116 | tag_304:
117 | Value: true
118 | tag_305:
119 | Value: true
120 | tag_31:
121 | Value: true
122 | tag_310:
123 | Value: true
124 | tag_311:
125 | Value: true
126 | tag_314:
127 | Value: true
128 | tag_315:
129 | Value: true
130 | tag_316:
131 | Value: true
132 | tag_317:
133 | Value: true
134 | tag_32:
135 | Value: true
136 | tag_33:
137 | Value: true
138 | tag_332:
139 | Value: true
140 | tag_333:
141 | Value: true
142 | tag_336:
143 | Value: true
144 | tag_337:
145 | Value: true
146 | tag_338:
147 | Value: true
148 | tag_339:
149 | Value: true
150 | tag_350:
151 | Value: true
152 | tag_351:
153 | Value: true
154 | tag_352:
155 | Value: true
156 | tag_353:
157 | Value: true
158 | tag_374:
159 | Value: true
160 | tag_375:
161 | Value: true
162 | tag_394:
163 | Value: true
164 | tag_395:
165 | Value: true
166 | tag_398:
167 | Value: true
168 | tag_399:
169 | Value: true
170 | tag_4:
171 | Value: true
172 | tag_400:
173 | Value: true
174 | tag_401:
175 | Value: true
176 | tag_411:
177 | Value: true
178 | tag_413:
179 | Value: true
180 | tag_415:
181 | Value: true
182 | tag_417:
183 | Value: true
184 | tag_419:
185 | Value: true
186 | tag_421:
187 | Value: true
188 | tag_5:
189 | Value: true
190 | tag_54:
191 | Value: true
192 | tag_55:
193 | Value: true
194 | tag_58:
195 | Value: true
196 | tag_59:
197 | Value: true
198 | tag_60:
199 | Value: true
200 | tag_61:
201 | Value: true
202 | tag_76:
203 | Value: true
204 | tag_77:
205 | Value: true
206 | tag_78:
207 | Value: true
208 | tag_79:
209 | Value: true
210 | tag_92:
211 | Value: true
212 | tag_93:
213 | Value: true
214 | tag_94:
215 | Value: true
216 | tag_95:
217 | Value: true
218 | tag_96:
219 | Value: true
220 | tag_97:
221 | Value: true
222 | Marker Scale: 1
223 | Name: TF
224 | Show Arrows: false
225 | Show Axes: true
226 | Show Names: true
227 | Tree:
228 | map:
229 | odom:
230 | robot_footprint:
231 | chassis:
232 | camera:
233 | {}
234 | camera_tf_frame:
235 | {}
236 | hokuyo:
237 | {}
238 | left_wheel:
239 | {}
240 | right_wheel:
241 | {}
242 | tag_0:
243 | {}
244 | tag_1:
245 | {}
246 | tag_111:
247 | {}
248 | tag_113:
249 | {}
250 | tag_115:
251 | {}
252 | tag_117:
253 | {}
254 | tag_119:
255 | {}
256 | tag_121:
257 | {}
258 | tag_16:
259 | {}
260 | tag_17:
261 | {}
262 | tag_18:
263 | {}
264 | tag_19:
265 | {}
266 | tag_2:
267 | {}
268 | tag_3:
269 | {}
270 | tag_30:
271 | {}
272 | tag_300:
273 | {}
274 | tag_301:
275 | {}
276 | tag_302:
277 | {}
278 | tag_303:
279 | {}
280 | tag_304:
281 | {}
282 | tag_305:
283 | {}
284 | tag_31:
285 | {}
286 | tag_310:
287 | {}
288 | tag_311:
289 | {}
290 | tag_314:
291 | {}
292 | tag_315:
293 | {}
294 | tag_316:
295 | {}
296 | tag_317:
297 | {}
298 | tag_32:
299 | {}
300 | tag_33:
301 | {}
302 | tag_332:
303 | {}
304 | tag_333:
305 | {}
306 | tag_336:
307 | {}
308 | tag_337:
309 | {}
310 | tag_338:
311 | {}
312 | tag_339:
313 | {}
314 | tag_350:
315 | {}
316 | tag_351:
317 | {}
318 | tag_352:
319 | {}
320 | tag_353:
321 | {}
322 | tag_374:
323 | {}
324 | tag_375:
325 | {}
326 | tag_394:
327 | {}
328 | tag_395:
329 | {}
330 | tag_398:
331 | {}
332 | tag_399:
333 | {}
334 | tag_4:
335 | {}
336 | tag_400:
337 | {}
338 | tag_401:
339 | {}
340 | tag_411:
341 | {}
342 | tag_413:
343 | {}
344 | tag_415:
345 | {}
346 | tag_417:
347 | {}
348 | tag_419:
349 | {}
350 | tag_421:
351 | {}
352 | tag_5:
353 | {}
354 | tag_54:
355 | {}
356 | tag_55:
357 | {}
358 | tag_58:
359 | {}
360 | tag_59:
361 | {}
362 | tag_60:
363 | {}
364 | tag_61:
365 | {}
366 | tag_76:
367 | {}
368 | tag_77:
369 | {}
370 | tag_78:
371 | {}
372 | tag_79:
373 | {}
374 | tag_92:
375 | {}
376 | tag_93:
377 | {}
378 | tag_94:
379 | {}
380 | tag_95:
381 | {}
382 | tag_96:
383 | {}
384 | tag_97:
385 | {}
386 | Update Interval: 0
387 | Value: true
388 | - Alpha: 0.300000012
389 | Class: rviz/RobotModel
390 | Collision Enabled: false
391 | Enabled: true
392 | Links:
393 | All Links Enabled: true
394 | Expand Joint Details: false
395 | Expand Link Details: false
396 | Expand Tree: false
397 | Link Tree Style: Links in Alphabetic Order
398 | camera:
399 | Alpha: 1
400 | Show Axes: false
401 | Show Trail: false
402 | Value: true
403 | camera_tf_frame:
404 | Alpha: 1
405 | Show Axes: false
406 | Show Trail: false
407 | chassis:
408 | Alpha: 1
409 | Show Axes: false
410 | Show Trail: false
411 | Value: true
412 | hokuyo:
413 | Alpha: 1
414 | Show Axes: false
415 | Show Trail: false
416 | Value: true
417 | left_wheel:
418 | Alpha: 1
419 | Show Axes: false
420 | Show Trail: false
421 | Value: true
422 | right_wheel:
423 | Alpha: 1
424 | Show Axes: false
425 | Show Trail: false
426 | Value: true
427 | robot_footprint:
428 | Alpha: 1
429 | Show Axes: false
430 | Show Trail: false
431 | Name: RobotModel
432 | Robot Description: robot_description
433 | TF Prefix: ""
434 | Update Interval: 0
435 | Value: true
436 | Visual Enabled: true
437 | - Alpha: 0.699999988
438 | Class: rviz/Map
439 | Color Scheme: map
440 | Draw Behind: false
441 | Enabled: true
442 | Name: Map
443 | Topic: /map
444 | Unreliable: false
445 | Use Timestamp: false
446 | Value: true
447 | - Alpha: 1
448 | Axes Length: 1
449 | Axes Radius: 0.100000001
450 | Class: rviz/Pose
451 | Color: 255; 25; 0
452 | Enabled: true
453 | Head Length: 0.300000012
454 | Head Radius: 0.100000001
455 | Name: Navigation Goal
456 | Shaft Length: 1
457 | Shaft Radius: 0.0500000007
458 | Shape: Arrow
459 | Topic: /move_base_simple/goal
460 | Unreliable: false
461 | Value: true
462 | - Alpha: 1
463 | Class: rviz/Polygon
464 | Color: 25; 255; 0
465 | Enabled: true
466 | Name: Robot Footprint
467 | Topic: /move_base/local_costmap/footprint
468 | Unreliable: false
469 | Value: true
470 | - Alpha: 0.699999988
471 | Class: rviz/Map
472 | Color Scheme: map
473 | Draw Behind: false
474 | Enabled: true
475 | Name: Global Costmap
476 | Topic: /move_base/global_costmap/costmap
477 | Unreliable: false
478 | Use Timestamp: false
479 | Value: true
480 | - Alpha: 0.699999988
481 | Class: rviz/Map
482 | Color Scheme: costmap
483 | Draw Behind: false
484 | Enabled: true
485 | Name: Local Costmap
486 | Topic: /move_base/local_costmap/costmap
487 | Unreliable: false
488 | Use Timestamp: false
489 | Value: true
490 | - Alpha: 1
491 | Buffer Length: 1
492 | Class: rviz/Path
493 | Color: 25; 255; 0
494 | Enabled: true
495 | Head Diameter: 0.300000012
496 | Head Length: 0.200000003
497 | Length: 0.300000012
498 | Line Style: Lines
499 | Line Width: 0.0299999993
500 | Name: Global Path
501 | Offset:
502 | X: 0
503 | Y: 0
504 | Z: 0
505 | Pose Color: 255; 85; 255
506 | Pose Style: None
507 | Radius: 0.0299999993
508 | Shaft Diameter: 0.100000001
509 | Shaft Length: 0.100000001
510 | Topic: /move_base/NavfnROS/plan
511 | Unreliable: false
512 | Value: true
513 | - Alpha: 1
514 | Buffer Length: 1
515 | Class: rviz/Path
516 | Color: 255; 0; 0
517 | Enabled: true
518 | Head Diameter: 0.300000012
519 | Head Length: 0.200000003
520 | Length: 0.300000012
521 | Line Style: Lines
522 | Line Width: 0.0299999993
523 | Name: Local Path
524 | Offset:
525 | X: 0
526 | Y: 0
527 | Z: 0
528 | Pose Color: 255; 85; 255
529 | Pose Style: None
530 | Radius: 0.0299999993
531 | Shaft Diameter: 0.100000001
532 | Shaft Length: 0.100000001
533 | Topic: /move_base/TrajectoryPlannerROS/local_plan
534 | Unreliable: false
535 | Value: true
536 | Enabled: true
537 | Global Options:
538 | Background Color: 48; 48; 48
539 | Default Light: true
540 | Fixed Frame: map
541 | Frame Rate: 30
542 | Name: root
543 | Tools:
544 | - Class: rviz/Interact
545 | Hide Inactive Objects: true
546 | - Class: rviz/MoveCamera
547 | - Class: rviz/Select
548 | - Class: rviz/FocusCamera
549 | - Class: rviz/Measure
550 | - Class: rviz/SetInitialPose
551 | Topic: /initialpose
552 | - Class: rviz/SetGoal
553 | Topic: /move_base_simple/goal
554 | - Class: rviz/PublishPoint
555 | Single click: true
556 | Topic: /clicked_point
557 | Value: true
558 | Views:
559 | Current:
560 | Class: rviz/Orbit
561 | Distance: 5.05669641
562 | Enable Stereo Rendering:
563 | Stereo Eye Separation: 0.0599999987
564 | Stereo Focal Distance: 1
565 | Swap Stereo Eyes: false
566 | Value: false
567 | Focal Point:
568 | X: 1.12157452
569 | Y: 0.31264618
570 | Z: 1.02451193
571 | Focal Shape Fixed Size: true
572 | Focal Shape Size: 0.0500000007
573 | Invert Z Axis: false
574 | Name: Current View
575 | Near Clip Distance: 0.00999999978
576 | Pitch: 0.74039799
577 | Target Frame:
578 | Value: Orbit (rviz)
579 | Yaw: 5.4835844
580 | Saved: ~
581 | Window Geometry:
582 | Displays:
583 | collapsed: false
584 | Height: 909
585 | Hide Left Dock: false
586 | Hide Right Dock: false
587 | QMainWindow State: 000000ff00000000fd000000040000000000000156000002f5fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003a000002f5000000c600fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002f5fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003a000002f50000009e00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d00650100000000000007800000024400fffffffb0000000800540069006d006501000000000000045000000000000000000000050f000002f500000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
588 | Selection:
589 | collapsed: false
590 | Time:
591 | collapsed: false
592 | Tool Properties:
593 | collapsed: false
594 | Views:
595 | collapsed: false
596 | Width: 1920
597 | X: 0
598 | Y: 0
599 |
--------------------------------------------------------------------------------
/config/tag_sizes.yaml:
--------------------------------------------------------------------------------
1 | ---
2 | -
3 | id: 0
4 | frame_id: tag_0
5 | size: 0.16
6 | -
7 | id: 1
8 | frame_id: tag_1
9 | size: 0.16
10 | -
11 | id: 2
12 | frame_id: tag_2
13 | size: 0.16
14 | -
15 | id: 3
16 | frame_id: tag_3
17 | size: 0.16
18 | -
19 | id: 4
20 | frame_id: tag_4
21 | size: 0.16
22 | -
23 | id: 5
24 | frame_id: tag_5
25 | size: 0.16
26 | -
27 | id: 6
28 | frame_id: tag_6
29 | size: 0.16
30 | -
31 | id: 7
32 | frame_id: tag_7
33 | size: 0.16
34 | -
35 | id: 8
36 | frame_id: tag_8
37 | size: 0.16
38 | -
39 | id: 9
40 | frame_id: tag_9
41 | size: 0.16
42 | -
43 | id: 10
44 | frame_id: tag_10
45 | size: 0.16
46 | -
47 | id: 11
48 | frame_id: tag_11
49 | size: 0.16
50 | -
51 | id: 12
52 | frame_id: tag_12
53 | size: 0.16
54 | -
55 | id: 13
56 | frame_id: tag_13
57 | size: 0.16
58 | -
59 | id: 14
60 | frame_id: tag_14
61 | size: 0.16
62 | -
63 | id: 15
64 | frame_id: tag_15
65 | size: 0.16
66 | -
67 | id: 16
68 | frame_id: tag_16
69 | size: 0.16
70 | -
71 | id: 17
72 | frame_id: tag_17
73 | size: 0.16
74 | -
75 | id: 18
76 | frame_id: tag_18
77 | size: 0.16
78 | -
79 | id: 19
80 | frame_id: tag_19
81 | size: 0.16
82 | -
83 | id: 20
84 | frame_id: tag_20
85 | size: 0.16
86 | -
87 | id: 21
88 | frame_id: tag_21
89 | size: 0.16
90 | -
91 | id: 22
92 | frame_id: tag_22
93 | size: 0.16
94 | -
95 | id: 23
96 | frame_id: tag_23
97 | size: 0.16
98 | -
99 | id: 24
100 | frame_id: tag_24
101 | size: 0.16
102 | -
103 | id: 25
104 | frame_id: tag_25
105 | size: 0.16
106 | -
107 | id: 26
108 | frame_id: tag_26
109 | size: 0.16
110 | -
111 | id: 27
112 | frame_id: tag_27
113 | size: 0.16
114 | -
115 | id: 28
116 | frame_id: tag_28
117 | size: 0.16
118 | -
119 | id: 29
120 | frame_id: tag_29
121 | size: 0.16
122 | -
123 | id: 30
124 | frame_id: tag_30
125 | size: 0.16
126 | -
127 | id: 31
128 | frame_id: tag_31
129 | size: 0.16
130 | -
131 | id: 32
132 | frame_id: tag_32
133 | size: 0.16
134 | -
135 | id: 33
136 | frame_id: tag_33
137 | size: 0.16
138 | -
139 | id: 34
140 | frame_id: tag_34
141 | size: 0.16
142 | -
143 | id: 35
144 | frame_id: tag_35
145 | size: 0.16
146 | -
147 | id: 36
148 | frame_id: tag_36
149 | size: 0.16
150 | -
151 | id: 37
152 | frame_id: tag_37
153 | size: 0.16
154 | -
155 | id: 38
156 | frame_id: tag_38
157 | size: 0.16
158 | -
159 | id: 39
160 | frame_id: tag_39
161 | size: 0.16
162 | -
163 | id: 40
164 | frame_id: tag_40
165 | size: 0.16
166 | -
167 | id: 41
168 | frame_id: tag_41
169 | size: 0.16
170 | -
171 | id: 42
172 | frame_id: tag_42
173 | size: 0.16
174 | -
175 | id: 43
176 | frame_id: tag_43
177 | size: 0.16
178 | -
179 | id: 44
180 | frame_id: tag_44
181 | size: 0.16
182 | -
183 | id: 45
184 | frame_id: tag_45
185 | size: 0.16
186 | -
187 | id: 46
188 | frame_id: tag_46
189 | size: 0.16
190 | -
191 | id: 47
192 | frame_id: tag_47
193 | size: 0.16
194 | -
195 | id: 48
196 | frame_id: tag_48
197 | size: 0.16
198 | -
199 | id: 49
200 | frame_id: tag_49
201 | size: 0.16
202 | -
203 | id: 50
204 | frame_id: tag_50
205 | size: 0.16
206 | -
207 | id: 51
208 | frame_id: tag_51
209 | size: 0.16
210 | -
211 | id: 52
212 | frame_id: tag_52
213 | size: 0.16
214 | -
215 | id: 53
216 | frame_id: tag_53
217 | size: 0.16
218 | -
219 | id: 54
220 | frame_id: tag_54
221 | size: 0.16
222 | -
223 | id: 55
224 | frame_id: tag_55
225 | size: 0.16
226 | -
227 | id: 56
228 | frame_id: tag_56
229 | size: 0.16
230 | -
231 | id: 57
232 | frame_id: tag_57
233 | size: 0.16
234 | -
235 | id: 58
236 | frame_id: tag_58
237 | size: 0.16
238 | -
239 | id: 59
240 | frame_id: tag_59
241 | size: 0.16
242 | -
243 | id: 60
244 | frame_id: tag_60
245 | size: 0.16
246 | -
247 | id: 61
248 | frame_id: tag_61
249 | size: 0.16
250 | -
251 | id: 62
252 | frame_id: tag_62
253 | size: 0.16
254 | -
255 | id: 63
256 | frame_id: tag_63
257 | size: 0.16
258 | -
259 | id: 64
260 | frame_id: tag_64
261 | size: 0.16
262 | -
263 | id: 65
264 | frame_id: tag_65
265 | size: 0.16
266 | -
267 | id: 66
268 | frame_id: tag_66
269 | size: 0.16
270 | -
271 | id: 67
272 | frame_id: tag_67
273 | size: 0.16
274 | -
275 | id: 68
276 | frame_id: tag_68
277 | size: 0.16
278 | -
279 | id: 69
280 | frame_id: tag_69
281 | size: 0.16
282 | -
283 | id: 70
284 | frame_id: tag_70
285 | size: 0.16
286 | -
287 | id: 71
288 | frame_id: tag_71
289 | size: 0.16
290 | -
291 | id: 72
292 | frame_id: tag_72
293 | size: 0.16
294 | -
295 | id: 73
296 | frame_id: tag_73
297 | size: 0.16
298 | -
299 | id: 74
300 | frame_id: tag_74
301 | size: 0.16
302 | -
303 | id: 75
304 | frame_id: tag_75
305 | size: 0.16
306 | -
307 | id: 76
308 | frame_id: tag_76
309 | size: 0.16
310 | -
311 | id: 77
312 | frame_id: tag_77
313 | size: 0.16
314 | -
315 | id: 78
316 | frame_id: tag_78
317 | size: 0.16
318 | -
319 | id: 79
320 | frame_id: tag_79
321 | size: 0.16
322 | -
323 | id: 80
324 | frame_id: tag_80
325 | size: 0.16
326 | -
327 | id: 81
328 | frame_id: tag_81
329 | size: 0.16
330 | -
331 | id: 82
332 | frame_id: tag_82
333 | size: 0.16
334 | -
335 | id: 83
336 | frame_id: tag_83
337 | size: 0.16
338 | -
339 | id: 84
340 | frame_id: tag_84
341 | size: 0.16
342 | -
343 | id: 85
344 | frame_id: tag_85
345 | size: 0.16
346 | -
347 | id: 86
348 | frame_id: tag_86
349 | size: 0.16
350 | -
351 | id: 87
352 | frame_id: tag_87
353 | size: 0.16
354 | -
355 | id: 88
356 | frame_id: tag_88
357 | size: 0.16
358 | -
359 | id: 89
360 | frame_id: tag_89
361 | size: 0.16
362 | -
363 | id: 90
364 | frame_id: tag_90
365 | size: 0.16
366 | -
367 | id: 91
368 | frame_id: tag_91
369 | size: 0.16
370 | -
371 | id: 92
372 | frame_id: tag_92
373 | size: 0.16
374 | -
375 | id: 93
376 | frame_id: tag_93
377 | size: 0.16
378 | -
379 | id: 94
380 | frame_id: tag_94
381 | size: 0.16
382 | -
383 | id: 95
384 | frame_id: tag_95
385 | size: 0.16
386 | -
387 | id: 96
388 | frame_id: tag_96
389 | size: 0.16
390 | -
391 | id: 97
392 | frame_id: tag_97
393 | size: 0.16
394 | -
395 | id: 98
396 | frame_id: tag_98
397 | size: 0.16
398 | -
399 | id: 99
400 | frame_id: tag_99
401 | size: 0.16
402 | -
403 | id: 100
404 | frame_id: tag_100
405 | size: 0.16
406 | -
407 | id: 101
408 | frame_id: tag_101
409 | size: 0.16
410 | -
411 | id: 102
412 | frame_id: tag_102
413 | size: 0.16
414 | -
415 | id: 103
416 | frame_id: tag_103
417 | size: 0.16
418 | -
419 | id: 104
420 | frame_id: tag_104
421 | size: 0.16
422 | -
423 | id: 105
424 | frame_id: tag_105
425 | size: 0.16
426 | -
427 | id: 106
428 | frame_id: tag_106
429 | size: 0.16
430 | -
431 | id: 107
432 | frame_id: tag_107
433 | size: 0.16
434 | -
435 | id: 108
436 | frame_id: tag_108
437 | size: 0.16
438 | -
439 | id: 109
440 | frame_id: tag_109
441 | size: 0.16
442 | -
443 | id: 110
444 | frame_id: tag_110
445 | size: 0.16
446 | -
447 | id: 111
448 | frame_id: tag_111
449 | size: 0.16
450 | -
451 | id: 112
452 | frame_id: tag_112
453 | size: 0.16
454 | -
455 | id: 113
456 | frame_id: tag_113
457 | size: 0.16
458 | -
459 | id: 114
460 | frame_id: tag_114
461 | size: 0.16
462 | -
463 | id: 115
464 | frame_id: tag_115
465 | size: 0.16
466 | -
467 | id: 116
468 | frame_id: tag_116
469 | size: 0.16
470 | -
471 | id: 117
472 | frame_id: tag_117
473 | size: 0.16
474 | -
475 | id: 118
476 | frame_id: tag_118
477 | size: 0.16
478 | -
479 | id: 119
480 | frame_id: tag_119
481 | size: 0.16
482 | -
483 | id: 120
484 | frame_id: tag_120
485 | size: 0.16
486 | -
487 | id: 121
488 | frame_id: tag_121
489 | size: 0.16
490 | -
491 | id: 122
492 | frame_id: tag_122
493 | size: 0.16
494 | -
495 | id: 123
496 | frame_id: tag_123
497 | size: 0.16
498 | -
499 | id: 124
500 | frame_id: tag_124
501 | size: 0.16
502 | -
503 | id: 125
504 | frame_id: tag_125
505 | size: 0.16
506 | -
507 | id: 126
508 | frame_id: tag_126
509 | size: 0.16
510 | -
511 | id: 127
512 | frame_id: tag_127
513 | size: 0.16
514 | -
515 | id: 128
516 | frame_id: tag_128
517 | size: 0.16
518 | -
519 | id: 129
520 | frame_id: tag_129
521 | size: 0.16
522 | -
523 | id: 130
524 | frame_id: tag_130
525 | size: 0.16
526 | -
527 | id: 131
528 | frame_id: tag_131
529 | size: 0.16
530 | -
531 | id: 132
532 | frame_id: tag_132
533 | size: 0.16
534 | -
535 | id: 133
536 | frame_id: tag_133
537 | size: 0.16
538 | -
539 | id: 134
540 | frame_id: tag_134
541 | size: 0.16
542 | -
543 | id: 135
544 | frame_id: tag_135
545 | size: 0.16
546 | -
547 | id: 136
548 | frame_id: tag_136
549 | size: 0.16
550 | -
551 | id: 137
552 | frame_id: tag_137
553 | size: 0.16
554 | -
555 | id: 138
556 | frame_id: tag_138
557 | size: 0.16
558 | -
559 | id: 139
560 | frame_id: tag_139
561 | size: 0.16
562 | -
563 | id: 140
564 | frame_id: tag_140
565 | size: 0.16
566 | -
567 | id: 141
568 | frame_id: tag_141
569 | size: 0.16
570 | -
571 | id: 142
572 | frame_id: tag_142
573 | size: 0.16
574 | -
575 | id: 143
576 | frame_id: tag_143
577 | size: 0.16
578 | -
579 | id: 144
580 | frame_id: tag_144
581 | size: 0.16
582 | -
583 | id: 145
584 | frame_id: tag_145
585 | size: 0.16
586 | -
587 | id: 146
588 | frame_id: tag_146
589 | size: 0.16
590 | -
591 | id: 147
592 | frame_id: tag_147
593 | size: 0.16
594 | -
595 | id: 148
596 | frame_id: tag_148
597 | size: 0.16
598 | -
599 | id: 149
600 | frame_id: tag_149
601 | size: 0.16
602 | -
603 | id: 150
604 | frame_id: tag_150
605 | size: 0.16
606 | -
607 | id: 151
608 | frame_id: tag_151
609 | size: 0.16
610 | -
611 | id: 152
612 | frame_id: tag_152
613 | size: 0.16
614 | -
615 | id: 153
616 | frame_id: tag_153
617 | size: 0.16
618 | -
619 | id: 154
620 | frame_id: tag_154
621 | size: 0.16
622 | -
623 | id: 155
624 | frame_id: tag_155
625 | size: 0.16
626 | -
627 | id: 156
628 | frame_id: tag_156
629 | size: 0.16
630 | -
631 | id: 157
632 | frame_id: tag_157
633 | size: 0.16
634 | -
635 | id: 158
636 | frame_id: tag_158
637 | size: 0.16
638 | -
639 | id: 159
640 | frame_id: tag_159
641 | size: 0.16
642 | -
643 | id: 160
644 | frame_id: tag_160
645 | size: 0.16
646 | -
647 | id: 161
648 | frame_id: tag_161
649 | size: 0.16
650 | -
651 | id: 162
652 | frame_id: tag_162
653 | size: 0.16
654 | -
655 | id: 163
656 | frame_id: tag_163
657 | size: 0.16
658 | -
659 | id: 164
660 | frame_id: tag_164
661 | size: 0.16
662 | -
663 | id: 165
664 | frame_id: tag_165
665 | size: 0.16
666 | -
667 | id: 166
668 | frame_id: tag_166
669 | size: 0.16
670 | -
671 | id: 167
672 | frame_id: tag_167
673 | size: 0.16
674 | -
675 | id: 168
676 | frame_id: tag_168
677 | size: 0.16
678 | -
679 | id: 169
680 | frame_id: tag_169
681 | size: 0.16
682 | -
683 | id: 170
684 | frame_id: tag_170
685 | size: 0.16
686 | -
687 | id: 171
688 | frame_id: tag_171
689 | size: 0.16
690 | -
691 | id: 172
692 | frame_id: tag_172
693 | size: 0.16
694 | -
695 | id: 173
696 | frame_id: tag_173
697 | size: 0.16
698 | -
699 | id: 174
700 | frame_id: tag_174
701 | size: 0.16
702 | -
703 | id: 175
704 | frame_id: tag_175
705 | size: 0.16
706 | -
707 | id: 176
708 | frame_id: tag_176
709 | size: 0.16
710 | -
711 | id: 177
712 | frame_id: tag_177
713 | size: 0.16
714 | -
715 | id: 178
716 | frame_id: tag_178
717 | size: 0.16
718 | -
719 | id: 179
720 | frame_id: tag_179
721 | size: 0.16
722 | -
723 | id: 180
724 | frame_id: tag_180
725 | size: 0.16
726 | -
727 | id: 181
728 | frame_id: tag_181
729 | size: 0.16
730 | -
731 | id: 182
732 | frame_id: tag_182
733 | size: 0.16
734 | -
735 | id: 183
736 | frame_id: tag_183
737 | size: 0.16
738 | -
739 | id: 184
740 | frame_id: tag_184
741 | size: 0.16
742 | -
743 | id: 185
744 | frame_id: tag_185
745 | size: 0.16
746 | -
747 | id: 186
748 | frame_id: tag_186
749 | size: 0.16
750 | -
751 | id: 187
752 | frame_id: tag_187
753 | size: 0.16
754 | -
755 | id: 188
756 | frame_id: tag_188
757 | size: 0.16
758 | -
759 | id: 189
760 | frame_id: tag_189
761 | size: 0.16
762 | -
763 | id: 190
764 | frame_id: tag_190
765 | size: 0.16
766 | -
767 | id: 191
768 | frame_id: tag_191
769 | size: 0.16
770 | -
771 | id: 192
772 | frame_id: tag_192
773 | size: 0.16
774 | -
775 | id: 193
776 | frame_id: tag_193
777 | size: 0.16
778 | -
779 | id: 194
780 | frame_id: tag_194
781 | size: 0.16
782 | -
783 | id: 195
784 | frame_id: tag_195
785 | size: 0.16
786 | -
787 | id: 196
788 | frame_id: tag_196
789 | size: 0.16
790 | -
791 | id: 197
792 | frame_id: tag_197
793 | size: 0.16
794 | -
795 | id: 198
796 | frame_id: tag_198
797 | size: 0.16
798 | -
799 | id: 199
800 | frame_id: tag_199
801 | size: 0.16
802 | -
803 | id: 200
804 | frame_id: tag_200
805 | size: 0.16
806 | -
807 | id: 201
808 | frame_id: tag_201
809 | size: 0.16
810 | -
811 | id: 202
812 | frame_id: tag_202
813 | size: 0.16
814 | -
815 | id: 203
816 | frame_id: tag_203
817 | size: 0.16
818 | -
819 | id: 204
820 | frame_id: tag_204
821 | size: 0.16
822 | -
823 | id: 205
824 | frame_id: tag_205
825 | size: 0.16
826 | -
827 | id: 206
828 | frame_id: tag_206
829 | size: 0.16
830 | -
831 | id: 207
832 | frame_id: tag_207
833 | size: 0.16
834 | -
835 | id: 208
836 | frame_id: tag_208
837 | size: 0.16
838 | -
839 | id: 209
840 | frame_id: tag_209
841 | size: 0.16
842 | -
843 | id: 210
844 | frame_id: tag_210
845 | size: 0.16
846 | -
847 | id: 211
848 | frame_id: tag_211
849 | size: 0.16
850 | -
851 | id: 212
852 | frame_id: tag_212
853 | size: 0.16
854 | -
855 | id: 213
856 | frame_id: tag_213
857 | size: 0.16
858 | -
859 | id: 214
860 | frame_id: tag_214
861 | size: 0.16
862 | -
863 | id: 215
864 | frame_id: tag_215
865 | size: 0.16
866 | -
867 | id: 216
868 | frame_id: tag_216
869 | size: 0.16
870 | -
871 | id: 217
872 | frame_id: tag_217
873 | size: 0.16
874 | -
875 | id: 218
876 | frame_id: tag_218
877 | size: 0.16
878 | -
879 | id: 219
880 | frame_id: tag_219
881 | size: 0.16
882 | -
883 | id: 220
884 | frame_id: tag_220
885 | size: 0.16
886 | -
887 | id: 221
888 | frame_id: tag_221
889 | size: 0.16
890 | -
891 | id: 222
892 | frame_id: tag_222
893 | size: 0.16
894 | -
895 | id: 223
896 | frame_id: tag_223
897 | size: 0.16
898 | -
899 | id: 224
900 | frame_id: tag_224
901 | size: 0.16
902 | -
903 | id: 225
904 | frame_id: tag_225
905 | size: 0.16
906 | -
907 | id: 226
908 | frame_id: tag_226
909 | size: 0.16
910 | -
911 | id: 227
912 | frame_id: tag_227
913 | size: 0.16
914 | -
915 | id: 228
916 | frame_id: tag_228
917 | size: 0.16
918 | -
919 | id: 229
920 | frame_id: tag_229
921 | size: 0.16
922 | -
923 | id: 230
924 | frame_id: tag_230
925 | size: 0.16
926 | -
927 | id: 231
928 | frame_id: tag_231
929 | size: 0.16
930 | -
931 | id: 232
932 | frame_id: tag_232
933 | size: 0.16
934 | -
935 | id: 233
936 | frame_id: tag_233
937 | size: 0.16
938 | -
939 | id: 234
940 | frame_id: tag_234
941 | size: 0.16
942 | -
943 | id: 235
944 | frame_id: tag_235
945 | size: 0.16
946 | -
947 | id: 236
948 | frame_id: tag_236
949 | size: 0.16
950 | -
951 | id: 237
952 | frame_id: tag_237
953 | size: 0.16
954 | -
955 | id: 238
956 | frame_id: tag_238
957 | size: 0.16
958 | -
959 | id: 239
960 | frame_id: tag_239
961 | size: 0.16
962 | -
963 | id: 240
964 | frame_id: tag_240
965 | size: 0.16
966 | -
967 | id: 241
968 | frame_id: tag_241
969 | size: 0.16
970 | -
971 | id: 242
972 | frame_id: tag_242
973 | size: 0.16
974 | -
975 | id: 243
976 | frame_id: tag_243
977 | size: 0.16
978 | -
979 | id: 244
980 | frame_id: tag_244
981 | size: 0.16
982 | -
983 | id: 245
984 | frame_id: tag_245
985 | size: 0.16
986 | -
987 | id: 246
988 | frame_id: tag_246
989 | size: 0.16
990 | -
991 | id: 247
992 | frame_id: tag_247
993 | size: 0.16
994 | -
995 | id: 248
996 | frame_id: tag_248
997 | size: 0.16
998 | -
999 | id: 249
1000 | frame_id: tag_249
1001 | size: 0.16
1002 | -
1003 | id: 250
1004 | frame_id: tag_250
1005 | size: 0.16
1006 | -
1007 | id: 251
1008 | frame_id: tag_251
1009 | size: 0.16
1010 | -
1011 | id: 252
1012 | frame_id: tag_252
1013 | size: 0.16
1014 | -
1015 | id: 253
1016 | frame_id: tag_253
1017 | size: 0.16
1018 | -
1019 | id: 254
1020 | frame_id: tag_254
1021 | size: 0.16
1022 | -
1023 | id: 255
1024 | frame_id: tag_255
1025 | size: 0.16
1026 | -
1027 | id: 256
1028 | frame_id: tag_256
1029 | size: 0.16
1030 | -
1031 | id: 257
1032 | frame_id: tag_257
1033 | size: 0.16
1034 | -
1035 | id: 258
1036 | frame_id: tag_258
1037 | size: 0.16
1038 | -
1039 | id: 259
1040 | frame_id: tag_259
1041 | size: 0.16
1042 | -
1043 | id: 260
1044 | frame_id: tag_260
1045 | size: 0.16
1046 | -
1047 | id: 261
1048 | frame_id: tag_261
1049 | size: 0.16
1050 | -
1051 | id: 262
1052 | frame_id: tag_262
1053 | size: 0.16
1054 | -
1055 | id: 263
1056 | frame_id: tag_263
1057 | size: 0.16
1058 | -
1059 | id: 264
1060 | frame_id: tag_264
1061 | size: 0.16
1062 | -
1063 | id: 265
1064 | frame_id: tag_265
1065 | size: 0.16
1066 | -
1067 | id: 266
1068 | frame_id: tag_266
1069 | size: 0.16
1070 | -
1071 | id: 267
1072 | frame_id: tag_267
1073 | size: 0.16
1074 | -
1075 | id: 268
1076 | frame_id: tag_268
1077 | size: 0.16
1078 | -
1079 | id: 269
1080 | frame_id: tag_269
1081 | size: 0.16
1082 | -
1083 | id: 270
1084 | frame_id: tag_270
1085 | size: 0.16
1086 | -
1087 | id: 271
1088 | frame_id: tag_271
1089 | size: 0.16
1090 | -
1091 | id: 272
1092 | frame_id: tag_272
1093 | size: 0.16
1094 | -
1095 | id: 273
1096 | frame_id: tag_273
1097 | size: 0.16
1098 | -
1099 | id: 274
1100 | frame_id: tag_274
1101 | size: 0.16
1102 | -
1103 | id: 275
1104 | frame_id: tag_275
1105 | size: 0.16
1106 | -
1107 | id: 276
1108 | frame_id: tag_276
1109 | size: 0.16
1110 | -
1111 | id: 277
1112 | frame_id: tag_277
1113 | size: 0.16
1114 | -
1115 | id: 278
1116 | frame_id: tag_278
1117 | size: 0.16
1118 | -
1119 | id: 279
1120 | frame_id: tag_279
1121 | size: 0.16
1122 | -
1123 | id: 280
1124 | frame_id: tag_280
1125 | size: 0.16
1126 | -
1127 | id: 281
1128 | frame_id: tag_281
1129 | size: 0.16
1130 | -
1131 | id: 282
1132 | frame_id: tag_282
1133 | size: 0.16
1134 | -
1135 | id: 283
1136 | frame_id: tag_283
1137 | size: 0.16
1138 | -
1139 | id: 284
1140 | frame_id: tag_284
1141 | size: 0.16
1142 | -
1143 | id: 285
1144 | frame_id: tag_285
1145 | size: 0.16
1146 | -
1147 | id: 286
1148 | frame_id: tag_286
1149 | size: 0.16
1150 | -
1151 | id: 287
1152 | frame_id: tag_287
1153 | size: 0.16
1154 | -
1155 | id: 288
1156 | frame_id: tag_288
1157 | size: 0.16
1158 | -
1159 | id: 289
1160 | frame_id: tag_289
1161 | size: 0.16
1162 | -
1163 | id: 290
1164 | frame_id: tag_290
1165 | size: 0.16
1166 | -
1167 | id: 291
1168 | frame_id: tag_291
1169 | size: 0.16
1170 | -
1171 | id: 292
1172 | frame_id: tag_292
1173 | size: 0.16
1174 | -
1175 | id: 293
1176 | frame_id: tag_293
1177 | size: 0.16
1178 | -
1179 | id: 294
1180 | frame_id: tag_294
1181 | size: 0.16
1182 | -
1183 | id: 295
1184 | frame_id: tag_295
1185 | size: 0.16
1186 | -
1187 | id: 296
1188 | frame_id: tag_296
1189 | size: 0.16
1190 | -
1191 | id: 297
1192 | frame_id: tag_297
1193 | size: 0.16
1194 | -
1195 | id: 298
1196 | frame_id: tag_298
1197 | size: 0.16
1198 | -
1199 | id: 299
1200 | frame_id: tag_299
1201 | size: 0.16
1202 | -
1203 | id: 300
1204 | frame_id: tag_300
1205 | size: 0.16
1206 | -
1207 | id: 301
1208 | frame_id: tag_301
1209 | size: 0.16
1210 | -
1211 | id: 302
1212 | frame_id: tag_302
1213 | size: 0.16
1214 | -
1215 | id: 303
1216 | frame_id: tag_303
1217 | size: 0.16
1218 | -
1219 | id: 304
1220 | frame_id: tag_304
1221 | size: 0.16
1222 | -
1223 | id: 305
1224 | frame_id: tag_305
1225 | size: 0.16
1226 | -
1227 | id: 306
1228 | frame_id: tag_306
1229 | size: 0.16
1230 | -
1231 | id: 307
1232 | frame_id: tag_307
1233 | size: 0.16
1234 | -
1235 | id: 308
1236 | frame_id: tag_308
1237 | size: 0.16
1238 | -
1239 | id: 309
1240 | frame_id: tag_309
1241 | size: 0.16
1242 | -
1243 | id: 310
1244 | frame_id: tag_310
1245 | size: 0.16
1246 | -
1247 | id: 311
1248 | frame_id: tag_311
1249 | size: 0.16
1250 | -
1251 | id: 312
1252 | frame_id: tag_312
1253 | size: 0.16
1254 | -
1255 | id: 313
1256 | frame_id: tag_313
1257 | size: 0.16
1258 | -
1259 | id: 314
1260 | frame_id: tag_314
1261 | size: 0.16
1262 | -
1263 | id: 315
1264 | frame_id: tag_315
1265 | size: 0.16
1266 | -
1267 | id: 316
1268 | frame_id: tag_316
1269 | size: 0.16
1270 | -
1271 | id: 317
1272 | frame_id: tag_317
1273 | size: 0.16
1274 | -
1275 | id: 318
1276 | frame_id: tag_318
1277 | size: 0.16
1278 | -
1279 | id: 319
1280 | frame_id: tag_319
1281 | size: 0.16
1282 | -
1283 | id: 320
1284 | frame_id: tag_320
1285 | size: 0.16
1286 | -
1287 | id: 321
1288 | frame_id: tag_321
1289 | size: 0.16
1290 | -
1291 | id: 322
1292 | frame_id: tag_322
1293 | size: 0.16
1294 | -
1295 | id: 323
1296 | frame_id: tag_323
1297 | size: 0.16
1298 | -
1299 | id: 324
1300 | frame_id: tag_324
1301 | size: 0.16
1302 | -
1303 | id: 325
1304 | frame_id: tag_325
1305 | size: 0.16
1306 | -
1307 | id: 326
1308 | frame_id: tag_326
1309 | size: 0.16
1310 | -
1311 | id: 327
1312 | frame_id: tag_327
1313 | size: 0.16
1314 | -
1315 | id: 328
1316 | frame_id: tag_328
1317 | size: 0.16
1318 | -
1319 | id: 329
1320 | frame_id: tag_329
1321 | size: 0.16
1322 | -
1323 | id: 330
1324 | frame_id: tag_330
1325 | size: 0.16
1326 | -
1327 | id: 331
1328 | frame_id: tag_331
1329 | size: 0.16
1330 | -
1331 | id: 332
1332 | frame_id: tag_332
1333 | size: 0.16
1334 | -
1335 | id: 333
1336 | frame_id: tag_333
1337 | size: 0.16
1338 | -
1339 | id: 334
1340 | frame_id: tag_334
1341 | size: 0.16
1342 | -
1343 | id: 335
1344 | frame_id: tag_335
1345 | size: 0.16
1346 | -
1347 | id: 336
1348 | frame_id: tag_336
1349 | size: 0.16
1350 | -
1351 | id: 337
1352 | frame_id: tag_337
1353 | size: 0.16
1354 | -
1355 | id: 338
1356 | frame_id: tag_338
1357 | size: 0.16
1358 | -
1359 | id: 339
1360 | frame_id: tag_339
1361 | size: 0.16
1362 | -
1363 | id: 340
1364 | frame_id: tag_340
1365 | size: 0.16
1366 | -
1367 | id: 341
1368 | frame_id: tag_341
1369 | size: 0.16
1370 | -
1371 | id: 342
1372 | frame_id: tag_342
1373 | size: 0.16
1374 | -
1375 | id: 343
1376 | frame_id: tag_343
1377 | size: 0.16
1378 | -
1379 | id: 344
1380 | frame_id: tag_344
1381 | size: 0.16
1382 | -
1383 | id: 345
1384 | frame_id: tag_345
1385 | size: 0.16
1386 | -
1387 | id: 346
1388 | frame_id: tag_346
1389 | size: 0.16
1390 | -
1391 | id: 347
1392 | frame_id: tag_347
1393 | size: 0.16
1394 | -
1395 | id: 348
1396 | frame_id: tag_348
1397 | size: 0.16
1398 | -
1399 | id: 349
1400 | frame_id: tag_349
1401 | size: 0.16
1402 | -
1403 | id: 350
1404 | frame_id: tag_350
1405 | size: 0.16
1406 | -
1407 | id: 351
1408 | frame_id: tag_351
1409 | size: 0.16
1410 | -
1411 | id: 352
1412 | frame_id: tag_352
1413 | size: 0.16
1414 | -
1415 | id: 353
1416 | frame_id: tag_353
1417 | size: 0.16
1418 | -
1419 | id: 354
1420 | frame_id: tag_354
1421 | size: 0.16
1422 | -
1423 | id: 355
1424 | frame_id: tag_355
1425 | size: 0.16
1426 | -
1427 | id: 356
1428 | frame_id: tag_356
1429 | size: 0.16
1430 | -
1431 | id: 357
1432 | frame_id: tag_357
1433 | size: 0.16
1434 | -
1435 | id: 358
1436 | frame_id: tag_358
1437 | size: 0.16
1438 | -
1439 | id: 359
1440 | frame_id: tag_359
1441 | size: 0.16
1442 | -
1443 | id: 360
1444 | frame_id: tag_360
1445 | size: 0.16
1446 | -
1447 | id: 361
1448 | frame_id: tag_361
1449 | size: 0.16
1450 | -
1451 | id: 362
1452 | frame_id: tag_362
1453 | size: 0.16
1454 | -
1455 | id: 363
1456 | frame_id: tag_363
1457 | size: 0.16
1458 | -
1459 | id: 364
1460 | frame_id: tag_364
1461 | size: 0.16
1462 | -
1463 | id: 365
1464 | frame_id: tag_365
1465 | size: 0.16
1466 | -
1467 | id: 366
1468 | frame_id: tag_366
1469 | size: 0.16
1470 | -
1471 | id: 367
1472 | frame_id: tag_367
1473 | size: 0.16
1474 | -
1475 | id: 368
1476 | frame_id: tag_368
1477 | size: 0.16
1478 | -
1479 | id: 369
1480 | frame_id: tag_369
1481 | size: 0.16
1482 | -
1483 | id: 370
1484 | frame_id: tag_370
1485 | size: 0.16
1486 | -
1487 | id: 371
1488 | frame_id: tag_371
1489 | size: 0.16
1490 | -
1491 | id: 372
1492 | frame_id: tag_372
1493 | size: 0.16
1494 | -
1495 | id: 373
1496 | frame_id: tag_373
1497 | size: 0.16
1498 | -
1499 | id: 374
1500 | frame_id: tag_374
1501 | size: 0.16
1502 | -
1503 | id: 375
1504 | frame_id: tag_375
1505 | size: 0.16
1506 | -
1507 | id: 376
1508 | frame_id: tag_376
1509 | size: 0.16
1510 | -
1511 | id: 377
1512 | frame_id: tag_377
1513 | size: 0.16
1514 | -
1515 | id: 378
1516 | frame_id: tag_378
1517 | size: 0.16
1518 | -
1519 | id: 379
1520 | frame_id: tag_379
1521 | size: 0.16
1522 | -
1523 | id: 380
1524 | frame_id: tag_380
1525 | size: 0.16
1526 | -
1527 | id: 381
1528 | frame_id: tag_381
1529 | size: 0.16
1530 | -
1531 | id: 382
1532 | frame_id: tag_382
1533 | size: 0.16
1534 | -
1535 | id: 383
1536 | frame_id: tag_383
1537 | size: 0.16
1538 | -
1539 | id: 384
1540 | frame_id: tag_384
1541 | size: 0.16
1542 | -
1543 | id: 385
1544 | frame_id: tag_385
1545 | size: 0.16
1546 | -
1547 | id: 386
1548 | frame_id: tag_386
1549 | size: 0.16
1550 | -
1551 | id: 387
1552 | frame_id: tag_387
1553 | size: 0.16
1554 | -
1555 | id: 388
1556 | frame_id: tag_388
1557 | size: 0.16
1558 | -
1559 | id: 389
1560 | frame_id: tag_389
1561 | size: 0.16
1562 | -
1563 | id: 390
1564 | frame_id: tag_390
1565 | size: 0.16
1566 | -
1567 | id: 391
1568 | frame_id: tag_391
1569 | size: 0.16
1570 | -
1571 | id: 392
1572 | frame_id: tag_392
1573 | size: 0.16
1574 | -
1575 | id: 393
1576 | frame_id: tag_393
1577 | size: 0.16
1578 | -
1579 | id: 394
1580 | frame_id: tag_394
1581 | size: 0.16
1582 | -
1583 | id: 395
1584 | frame_id: tag_395
1585 | size: 0.16
1586 | -
1587 | id: 396
1588 | frame_id: tag_396
1589 | size: 0.16
1590 | -
1591 | id: 397
1592 | frame_id: tag_397
1593 | size: 0.16
1594 | -
1595 | id: 398
1596 | frame_id: tag_398
1597 | size: 0.16
1598 | -
1599 | id: 399
1600 | frame_id: tag_399
1601 | size: 0.16
1602 | -
1603 | id: 400
1604 | frame_id: tag_400
1605 | size: 0.16
1606 | -
1607 | id: 401
1608 | frame_id: tag_401
1609 | size: 0.16
1610 | -
1611 | id: 402
1612 | frame_id: tag_402
1613 | size: 0.16
1614 | -
1615 | id: 403
1616 | frame_id: tag_403
1617 | size: 0.16
1618 | -
1619 | id: 404
1620 | frame_id: tag_404
1621 | size: 0.16
1622 | -
1623 | id: 405
1624 | frame_id: tag_405
1625 | size: 0.16
1626 | -
1627 | id: 406
1628 | frame_id: tag_406
1629 | size: 0.16
1630 | -
1631 | id: 407
1632 | frame_id: tag_407
1633 | size: 0.16
1634 | -
1635 | id: 408
1636 | frame_id: tag_408
1637 | size: 0.16
1638 | -
1639 | id: 409
1640 | frame_id: tag_409
1641 | size: 0.16
1642 | -
1643 | id: 410
1644 | frame_id: tag_410
1645 | size: 0.16
1646 | -
1647 | id: 411
1648 | frame_id: tag_411
1649 | size: 0.16
1650 | -
1651 | id: 412
1652 | frame_id: tag_412
1653 | size: 0.16
1654 | -
1655 | id: 413
1656 | frame_id: tag_413
1657 | size: 0.16
1658 | -
1659 | id: 414
1660 | frame_id: tag_414
1661 | size: 0.16
1662 | -
1663 | id: 415
1664 | frame_id: tag_415
1665 | size: 0.16
1666 | -
1667 | id: 416
1668 | frame_id: tag_416
1669 | size: 0.16
1670 | -
1671 | id: 417
1672 | frame_id: tag_417
1673 | size: 0.16
1674 | -
1675 | id: 418
1676 | frame_id: tag_418
1677 | size: 0.16
1678 | -
1679 | id: 419
1680 | frame_id: tag_419
1681 | size: 0.16
1682 | -
1683 | id: 420
1684 | frame_id: tag_420
1685 | size: 0.16
1686 | -
1687 | id: 421
1688 | frame_id: tag_421
1689 | size: 0.16
1690 | -
1691 | id: 422
1692 | frame_id: tag_422
1693 | size: 0.16
1694 | -
1695 | id: 423
1696 | frame_id: tag_423
1697 | size: 0.16
1698 | -
1699 | id: 424
1700 | frame_id: tag_424
1701 | size: 0.16
1702 | -
1703 | id: 425
1704 | frame_id: tag_425
1705 | size: 0.16
1706 | -
1707 | id: 426
1708 | frame_id: tag_426
1709 | size: 0.16
1710 | -
1711 | id: 427
1712 | frame_id: tag_427
1713 | size: 0.16
1714 | -
1715 | id: 428
1716 | frame_id: tag_428
1717 | size: 0.16
1718 | -
1719 | id: 429
1720 | frame_id: tag_429
1721 | size: 0.16
1722 | -
1723 | id: 430
1724 | frame_id: tag_430
1725 | size: 0.16
1726 | -
1727 | id: 431
1728 | frame_id: tag_431
1729 | size: 0.16
1730 | -
1731 | id: 432
1732 | frame_id: tag_432
1733 | size: 0.16
1734 | -
1735 | id: 433
1736 | frame_id: tag_433
1737 | size: 0.16
1738 | -
1739 | id: 434
1740 | frame_id: tag_434
1741 | size: 0.16
1742 | -
1743 | id: 435
1744 | frame_id: tag_435
1745 | size: 0.16
1746 | -
1747 | id: 436
1748 | frame_id: tag_436
1749 | size: 0.16
1750 | -
1751 | id: 437
1752 | frame_id: tag_437
1753 | size: 0.16
1754 | -
1755 | id: 438
1756 | frame_id: tag_438
1757 | size: 0.16
1758 | -
1759 | id: 439
1760 | frame_id: tag_439
1761 | size: 0.16
1762 | -
1763 | id: 440
1764 | frame_id: tag_440
1765 | size: 0.16
1766 | -
1767 | id: 441
1768 | frame_id: tag_441
1769 | size: 0.16
1770 | -
1771 | id: 442
1772 | frame_id: tag_442
1773 | size: 0.16
1774 | -
1775 | id: 443
1776 | frame_id: tag_443
1777 | size: 0.16
1778 | -
1779 | id: 444
1780 | frame_id: tag_444
1781 | size: 0.16
1782 | -
1783 | id: 445
1784 | frame_id: tag_445
1785 | size: 0.16
1786 | -
1787 | id: 446
1788 | frame_id: tag_446
1789 | size: 0.16
1790 | -
1791 | id: 447
1792 | frame_id: tag_447
1793 | size: 0.16
1794 | -
1795 | id: 448
1796 | frame_id: tag_448
1797 | size: 0.16
1798 | -
1799 | id: 449
1800 | frame_id: tag_449
1801 | size: 0.16
1802 | -
1803 | id: 450
1804 | frame_id: tag_450
1805 | size: 0.16
1806 | -
1807 | id: 451
1808 | frame_id: tag_451
1809 | size: 0.16
1810 | -
1811 | id: 452
1812 | frame_id: tag_452
1813 | size: 0.16
1814 | -
1815 | id: 453
1816 | frame_id: tag_453
1817 | size: 0.16
1818 | -
1819 | id: 454
1820 | frame_id: tag_454
1821 | size: 0.16
1822 | -
1823 | id: 455
1824 | frame_id: tag_455
1825 | size: 0.16
1826 | -
1827 | id: 456
1828 | frame_id: tag_456
1829 | size: 0.16
1830 | -
1831 | id: 457
1832 | frame_id: tag_457
1833 | size: 0.16
1834 | -
1835 | id: 458
1836 | frame_id: tag_458
1837 | size: 0.16
1838 | -
1839 | id: 459
1840 | frame_id: tag_459
1841 | size: 0.16
1842 | -
1843 | id: 460
1844 | frame_id: tag_460
1845 | size: 0.16
1846 | -
1847 | id: 461
1848 | frame_id: tag_461
1849 | size: 0.16
1850 | -
1851 | id: 462
1852 | frame_id: tag_462
1853 | size: 0.16
1854 | -
1855 | id: 463
1856 | frame_id: tag_463
1857 | size: 0.16
1858 | -
1859 | id: 464
1860 | frame_id: tag_464
1861 | size: 0.16
1862 | -
1863 | id: 465
1864 | frame_id: tag_465
1865 | size: 0.16
1866 | -
1867 | id: 466
1868 | frame_id: tag_466
1869 | size: 0.16
1870 | -
1871 | id: 467
1872 | frame_id: tag_467
1873 | size: 0.16
1874 | -
1875 | id: 468
1876 | frame_id: tag_468
1877 | size: 0.16
1878 | -
1879 | id: 469
1880 | frame_id: tag_469
1881 | size: 0.16
1882 | -
1883 | id: 470
1884 | frame_id: tag_470
1885 | size: 0.16
1886 | -
1887 | id: 471
1888 | frame_id: tag_471
1889 | size: 0.16
1890 | -
1891 | id: 472
1892 | frame_id: tag_472
1893 | size: 0.16
1894 | -
1895 | id: 473
1896 | frame_id: tag_473
1897 | size: 0.16
1898 | -
1899 | id: 474
1900 | frame_id: tag_474
1901 | size: 0.16
1902 | -
1903 | id: 475
1904 | frame_id: tag_475
1905 | size: 0.16
1906 | -
1907 | id: 476
1908 | frame_id: tag_476
1909 | size: 0.16
1910 | -
1911 | id: 477
1912 | frame_id: tag_477
1913 | size: 0.16
1914 | -
1915 | id: 478
1916 | frame_id: tag_478
1917 | size: 0.16
1918 | -
1919 | id: 479
1920 | frame_id: tag_479
1921 | size: 0.16
1922 | -
1923 | id: 480
1924 | frame_id: tag_480
1925 | size: 0.16
1926 | -
1927 | id: 481
1928 | frame_id: tag_481
1929 | size: 0.16
1930 | -
1931 | id: 482
1932 | frame_id: tag_482
1933 | size: 0.16
1934 | -
1935 | id: 483
1936 | frame_id: tag_483
1937 | size: 0.16
1938 | -
1939 | id: 484
1940 | frame_id: tag_484
1941 | size: 0.16
1942 | -
1943 | id: 485
1944 | frame_id: tag_485
1945 | size: 0.16
1946 | -
1947 | id: 486
1948 | frame_id: tag_486
1949 | size: 0.16
1950 | -
1951 | id: 487
1952 | frame_id: tag_487
1953 | size: 0.16
1954 | -
1955 | id: 488
1956 | frame_id: tag_488
1957 | size: 0.16
1958 | -
1959 | id: 489
1960 | frame_id: tag_489
1961 | size: 0.16
1962 | -
1963 | id: 490
1964 | frame_id: tag_490
1965 | size: 0.16
1966 | -
1967 | id: 491
1968 | frame_id: tag_491
1969 | size: 0.16
1970 | -
1971 | id: 492
1972 | frame_id: tag_492
1973 | size: 0.16
1974 | -
1975 | id: 493
1976 | frame_id: tag_493
1977 | size: 0.16
1978 | -
1979 | id: 494
1980 | frame_id: tag_494
1981 | size: 0.16
1982 | -
1983 | id: 495
1984 | frame_id: tag_495
1985 | size: 0.16
1986 | -
1987 | id: 496
1988 | frame_id: tag_496
1989 | size: 0.16
1990 | -
1991 | id: 497
1992 | frame_id: tag_497
1993 | size: 0.16
1994 | -
1995 | id: 498
1996 | frame_id: tag_498
1997 | size: 0.16
1998 | -
1999 | id: 499
2000 | frame_id: tag_499
2001 | size: 0.16
2002 | -
2003 | id: 500
2004 | frame_id: tag_500
2005 | size: 0.16
2006 | -
2007 | id: 501
2008 | frame_id: tag_501
2009 | size: 0.16
2010 | -
2011 | id: 502
2012 | frame_id: tag_502
2013 | size: 0.16
2014 | -
2015 | id: 503
2016 | frame_id: tag_503
2017 | size: 0.16
2018 | -
2019 | id: 504
2020 | frame_id: tag_504
2021 | size: 0.16
2022 | -
2023 | id: 505
2024 | frame_id: tag_505
2025 | size: 0.16
2026 | -
2027 | id: 506
2028 | frame_id: tag_506
2029 | size: 0.16
2030 | -
2031 | id: 507
2032 | frame_id: tag_507
2033 | size: 0.16
2034 | -
2035 | id: 508
2036 | frame_id: tag_508
2037 | size: 0.16
2038 | -
2039 | id: 509
2040 | frame_id: tag_509
2041 | size: 0.16
2042 | -
2043 | id: 510
2044 | frame_id: tag_510
2045 | size: 0.16
2046 | -
2047 | id: 511
2048 | frame_id: tag_511
2049 | size: 0.16
2050 | -
2051 | id: 512
2052 | frame_id: tag_512
2053 | size: 0.16
2054 | -
2055 | id: 513
2056 | frame_id: tag_513
2057 | size: 0.16
2058 | -
2059 | id: 514
2060 | frame_id: tag_514
2061 | size: 0.16
2062 | -
2063 | id: 515
2064 | frame_id: tag_515
2065 | size: 0.16
2066 | -
2067 | id: 516
2068 | frame_id: tag_516
2069 | size: 0.16
2070 | -
2071 | id: 517
2072 | frame_id: tag_517
2073 | size: 0.16
2074 | -
2075 | id: 518
2076 | frame_id: tag_518
2077 | size: 0.16
2078 | -
2079 | id: 519
2080 | frame_id: tag_519
2081 | size: 0.16
2082 | -
2083 | id: 520
2084 | frame_id: tag_520
2085 | size: 0.16
2086 | -
2087 | id: 521
2088 | frame_id: tag_521
2089 | size: 0.16
2090 | -
2091 | id: 522
2092 | frame_id: tag_522
2093 | size: 0.16
2094 | -
2095 | id: 523
2096 | frame_id: tag_523
2097 | size: 0.16
2098 | -
2099 | id: 524
2100 | frame_id: tag_524
2101 | size: 0.16
2102 | -
2103 | id: 525
2104 | frame_id: tag_525
2105 | size: 0.16
2106 | -
2107 | id: 526
2108 | frame_id: tag_526
2109 | size: 0.16
2110 | -
2111 | id: 527
2112 | frame_id: tag_527
2113 | size: 0.16
2114 | -
2115 | id: 528
2116 | frame_id: tag_528
2117 | size: 0.16
2118 | -
2119 | id: 529
2120 | frame_id: tag_529
2121 | size: 0.16
2122 | -
2123 | id: 530
2124 | frame_id: tag_530
2125 | size: 0.16
2126 | -
2127 | id: 531
2128 | frame_id: tag_531
2129 | size: 0.16
2130 | -
2131 | id: 532
2132 | frame_id: tag_532
2133 | size: 0.16
2134 | -
2135 | id: 533
2136 | frame_id: tag_533
2137 | size: 0.16
2138 | -
2139 | id: 534
2140 | frame_id: tag_534
2141 | size: 0.16
2142 | -
2143 | id: 535
2144 | frame_id: tag_535
2145 | size: 0.16
2146 | -
2147 | id: 536
2148 | frame_id: tag_536
2149 | size: 0.16
2150 | -
2151 | id: 537
2152 | frame_id: tag_537
2153 | size: 0.16
2154 | -
2155 | id: 538
2156 | frame_id: tag_538
2157 | size: 0.16
2158 | -
2159 | id: 539
2160 | frame_id: tag_539
2161 | size: 0.16
2162 | -
2163 | id: 540
2164 | frame_id: tag_540
2165 | size: 0.16
2166 | -
2167 | id: 541
2168 | frame_id: tag_541
2169 | size: 0.16
2170 | -
2171 | id: 542
2172 | frame_id: tag_542
2173 | size: 0.16
2174 | -
2175 | id: 543
2176 | frame_id: tag_543
2177 | size: 0.16
2178 | -
2179 | id: 544
2180 | frame_id: tag_544
2181 | size: 0.16
2182 | -
2183 | id: 545
2184 | frame_id: tag_545
2185 | size: 0.16
2186 | -
2187 | id: 546
2188 | frame_id: tag_546
2189 | size: 0.16
2190 | -
2191 | id: 547
2192 | frame_id: tag_547
2193 | size: 0.16
2194 | -
2195 | id: 548
2196 | frame_id: tag_548
2197 | size: 0.16
2198 | -
2199 | id: 549
2200 | frame_id: tag_549
2201 | size: 0.16
2202 | -
2203 | id: 550
2204 | frame_id: tag_550
2205 | size: 0.16
2206 | -
2207 | id: 551
2208 | frame_id: tag_551
2209 | size: 0.16
2210 | -
2211 | id: 552
2212 | frame_id: tag_552
2213 | size: 0.16
2214 | -
2215 | id: 553
2216 | frame_id: tag_553
2217 | size: 0.16
2218 | -
2219 | id: 554
2220 | frame_id: tag_554
2221 | size: 0.16
2222 | -
2223 | id: 555
2224 | frame_id: tag_555
2225 | size: 0.16
2226 | -
2227 | id: 556
2228 | frame_id: tag_556
2229 | size: 0.16
2230 | -
2231 | id: 557
2232 | frame_id: tag_557
2233 | size: 0.16
2234 | -
2235 | id: 558
2236 | frame_id: tag_558
2237 | size: 0.16
2238 | -
2239 | id: 559
2240 | frame_id: tag_559
2241 | size: 0.16
2242 | -
2243 | id: 560
2244 | frame_id: tag_560
2245 | size: 0.16
2246 | -
2247 | id: 561
2248 | frame_id: tag_561
2249 | size: 0.16
2250 | -
2251 | id: 562
2252 | frame_id: tag_562
2253 | size: 0.16
2254 | -
2255 | id: 563
2256 | frame_id: tag_563
2257 | size: 0.16
2258 | -
2259 | id: 564
2260 | frame_id: tag_564
2261 | size: 0.16
2262 | -
2263 | id: 565
2264 | frame_id: tag_565
2265 | size: 0.16
2266 | -
2267 | id: 566
2268 | frame_id: tag_566
2269 | size: 0.16
2270 | -
2271 | id: 567
2272 | frame_id: tag_567
2273 | size: 0.16
2274 | -
2275 | id: 568
2276 | frame_id: tag_568
2277 | size: 0.16
2278 | -
2279 | id: 569
2280 | frame_id: tag_569
2281 | size: 0.16
2282 | -
2283 | id: 570
2284 | frame_id: tag_570
2285 | size: 0.16
2286 | -
2287 | id: 571
2288 | frame_id: tag_571
2289 | size: 0.16
2290 | -
2291 | id: 572
2292 | frame_id: tag_572
2293 | size: 0.16
2294 | -
2295 | id: 573
2296 | frame_id: tag_573
2297 | size: 0.16
2298 | -
2299 | id: 574
2300 | frame_id: tag_574
2301 | size: 0.16
2302 | -
2303 | id: 575
2304 | frame_id: tag_575
2305 | size: 0.16
2306 | -
2307 | id: 576
2308 | frame_id: tag_576
2309 | size: 0.16
2310 | -
2311 | id: 577
2312 | frame_id: tag_577
2313 | size: 0.16
2314 | -
2315 | id: 578
2316 | frame_id: tag_578
2317 | size: 0.16
2318 | -
2319 | id: 579
2320 | frame_id: tag_579
2321 | size: 0.16
2322 | -
2323 | id: 580
2324 | frame_id: tag_580
2325 | size: 0.16
2326 | -
2327 | id: 581
2328 | frame_id: tag_581
2329 | size: 0.16
2330 | -
2331 | id: 582
2332 | frame_id: tag_582
2333 | size: 0.16
2334 | -
2335 | id: 583
2336 | frame_id: tag_583
2337 | size: 0.16
2338 | -
2339 | id: 584
2340 | frame_id: tag_584
2341 | size: 0.16
2342 | -
2343 | id: 585
2344 | frame_id: tag_585
2345 | size: 0.16
2346 | -
2347 | id: 586
2348 | frame_id: tag_586
2349 | size: 0.16
2350 |
--------------------------------------------------------------------------------