├── .gitignore
├── README.md
├── examples
└── simple.py
└── projectionmapping
├── __init__.py
└── data
├── mirefullhd.jpg
└── white.png
/.gitignore:
--------------------------------------------------------------------------------
1 | calibration.json
2 | __pycache__
--------------------------------------------------------------------------------
/README.md:
--------------------------------------------------------------------------------
1 | # Projection Mapping
2 |
3 | Kivy widget that reproject its content according to a calibration grid.
4 | It includes a calibration tool accessible from F2.
5 |
6 | 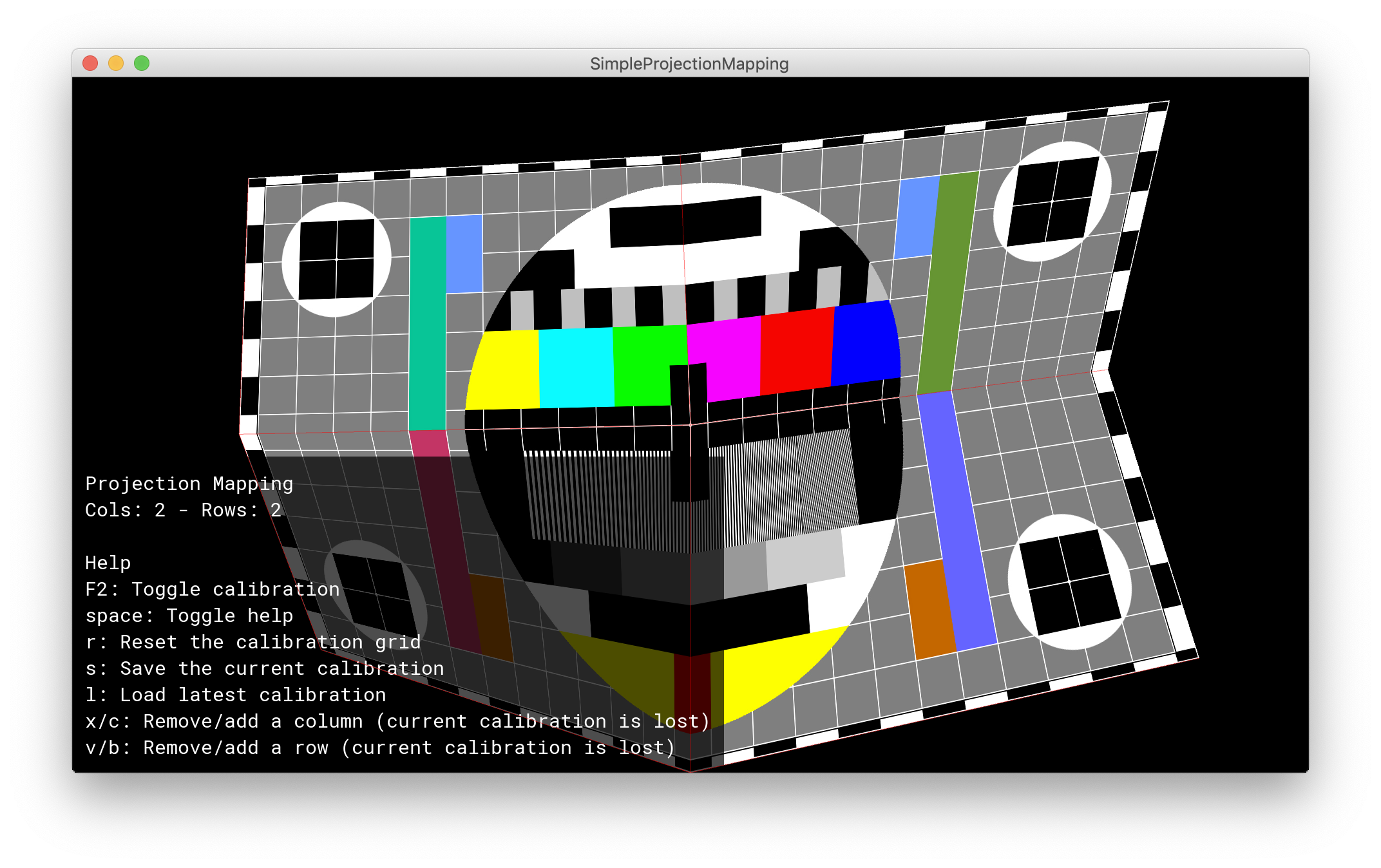 7 |
8 | Projection to a curved wall:
9 |
10 | 
11 |
12 | ## Usage
13 |
14 | ```python
15 | from kivy.app import App
16 | from projectionmapping import ProjectionMapping
17 | from kivy.uix.image import Image
18 |
19 | class SimpleProjectionMapping(App):
20 | def build(self):
21 | self.root = ProjectionMapping(filename="calibration.json")
22 | self.root.add_widget(
23 | Image(source="projectionmapping/data/mirefullhd.jpg"))
24 | ```
25 |
26 | ## Keybinding
27 |
28 | - F2: Toggle calibration
29 | - space: Toggle help
30 | - r: Reset the calibration grid
31 | - s: Save the current calibration
32 | - l: Load latest calibration
33 | - x/c: Remove/add a column (current calibration is lost)
34 | - v/b: Remove/add a row (current calibration is lost)
35 |
36 | ## Resources
37 |
38 | - http://www.reedbeta.com/blog/quadrilateral-interpolation-part-2/
39 | - http://iquilezles.org/www/articles/ibilinear/ibilinear.htm
40 |
--------------------------------------------------------------------------------
/examples/simple.py:
--------------------------------------------------------------------------------
1 | import sys
2 | sys.path += ["."]
3 | from kivy.app import App
4 | from projectionmapping import ProjectionMapping
5 | from kivy.uix.image import Image
6 |
7 |
8 | class SimpleProjectionMapping(App):
9 | def build(self):
10 | self.root = ProjectionMapping(filename="calibration.json")
11 | self.root.add_widget(
12 | Image(source="projectionmapping/data/mirefullhd.jpg"))
13 |
14 | if __name__ == "__main__":
15 | SimpleProjectionMapping().run()
--------------------------------------------------------------------------------
/projectionmapping/__init__.py:
--------------------------------------------------------------------------------
1 | """
2 | Projection mapping
3 | ==================
4 |
5 | .. author:: Mathieu Virbel
6 |
7 | Grid-based Inverse Bilinear Projection
8 | """
9 |
10 | from kivy.factory import Factory as F
11 | from kivy.properties import StringProperty, BooleanProperty
12 | from kivy.graphics import (
13 | Fbo, Rectangle, Color, Mesh, PushMatrix, PopMatrix, Scale,
14 | Canvas, RenderContext, Translate)
15 | from kivy.graphics.transformation import Matrix
16 | from kivy.lang import Builder
17 | from kivy.vector import Vector
18 | import json
19 |
20 | FS = '''
21 | #ifdef GL_ES
22 | precision highp float;
23 | #endif
24 |
25 | /* Outputs from the vertex shader */
26 | varying vec4 frag_color;
27 | varying vec2 q, q0, b1, b2, b3, vsize;
28 |
29 | /* uniform texture samplers */
30 | uniform sampler2D texture0;
31 | uniform mat4 frag_modelview_mat;
32 |
33 | float Wedge2D(vec2 v, vec2 w) {
34 | return v.x * w.y - v.y * w.x;
35 | }
36 |
37 | void main (void){
38 | // Set up quadratic formula
39 | float A = Wedge2D(b2, b3);
40 | float B = Wedge2D(b3, q) - Wedge2D(b1, b2);
41 | float C = Wedge2D(b1, q);
42 |
43 | // Solve for v
44 | vec2 uv;
45 | if (abs(A) < 0.001) {
46 | // Linear form
47 | uv.y = -C / B;
48 | } else {
49 | // Quadratic form. Take positive root for CCW winding with V-up
50 | float discrim = B * B - 4. * A *C;
51 | uv.y = 0.5 * (-B + sqrt(discrim)) / A;
52 | }
53 |
54 | // Solve for u, using largest-magnitude component
55 | vec2 denom = b1 + uv.y * b3;
56 | if (abs(denom.x) > abs(denom.y))
57 | uv.x = (q.x - b2.x * uv.y) / denom.x;
58 | else
59 | uv.x = (q.y - b2.y * uv.y) / denom.y;
60 |
61 | uv.x /= vsize.y;
62 | uv.y /= vsize.x;
63 | uv.x += q0.y;
64 | uv.y += q0.x;
65 |
66 | gl_FragColor = frag_color * texture2D(texture0, vec2(uv.y, uv.x));
67 | }
68 | '''
69 |
70 | VS = '''
71 | #ifdef GL_ES
72 | precision highp float;
73 | #endif
74 |
75 | /* Outputs to the fragment shader */
76 | varying vec4 frag_color;
77 | varying vec2 q;
78 | varying vec2 q0;
79 | varying vec2 b1;
80 | varying vec2 b2;
81 | varying vec2 b3;
82 | varying vec2 vsize;
83 |
84 | /* vertex attributes */
85 | attribute vec2 vPosition;
86 | attribute vec2 vQuad0;
87 | attribute vec2 vQuad1;
88 | attribute vec2 vQuad2;
89 | attribute vec2 vQuad3;
90 | attribute vec2 vTex0;
91 | attribute vec2 vSize;
92 |
93 | /* uniform variables */
94 | uniform mat4 modelview_mat;
95 | uniform mat4 projection_mat;
96 | uniform vec4 color;
97 | uniform float opacity;
98 |
99 | void main (void) {
100 | q = vPosition - vQuad0;
101 | q0 = vTex0;
102 | b1 = vQuad1 - vQuad0;
103 | b2 = vQuad2 - vQuad0;
104 | b3 = vQuad0 - vQuad1 - vQuad2 + vQuad3;
105 | vsize = vSize;
106 | frag_color = color * vec4(1.0, 1.0, 1.0, opacity);
107 | gl_Position = projection_mat * modelview_mat * vec4(vPosition.xy, 0.0, 1.0);
108 | }
109 | '''
110 |
111 |
112 |
113 | Builder.load_string("""
114 | :
115 | Label:
116 | size_hint: None, None
117 | size: self.texture_size[0] + dp(20), self.texture_size[1] + dp(20)
118 | text: root.informations
119 | markup: True
120 | opacity: int(root.show_help)
121 | font_name: "data/fonts/RobotoMono-Regular.ttf"
122 | canvas.before:
123 | Color:
124 | rgba: 0, 0, 0, 0.7
125 | Rectangle:
126 | pos: self.pos
127 | size: self.size
128 |
129 | :
130 | ProjectionMappingGrid:
131 | id: container
132 | ProjectionMappingCalibration:
133 | id: calibration
134 | """)
135 |
136 |
137 | class ProjectionMappingGrid(F.RelativeLayout):
138 |
139 | def __init__(self, **kwargs):
140 | self.cols = self.rows = 2
141 | self.canvas = RenderContext(
142 | fs=FS, vs=VS,
143 | use_parent_projection=True,
144 | use_parent_modelview=True)
145 | super(ProjectionMappingGrid, self).__init__(**kwargs)
146 | self.build_mapping()
147 | self.init_fbo()
148 | self.bind(size=self.rebuild_fbo)
149 |
150 | def add_widget(self, widget):
151 | if widget not in self.children:
152 | self.children.append(widget)
153 | self.g_fbo.add(widget.canvas)
154 |
155 | def remove_widget(self, widget):
156 | if widget in self.children:
157 | self.children.remove(widget)
158 | self.g_fbo.remove(widget.canvas)
159 |
160 | def init_fbo(self):
161 | with self.canvas:
162 | Color(1, 1, 1)
163 | self.g_fbo = Fbo(size=self.size)
164 | self.g_fbo_texture = self.g_fbo.texture
165 | Color(1, 1, 1, 1)
166 | PushMatrix()
167 | self.g_scale = Scale(self.width / 2, self.height / 2, 1.)
168 | self.build_grid()
169 | PopMatrix()
170 |
171 | def rebuild_fbo(self, *largs):
172 | asp = self.width / float(self.height)
173 | self.g_fbo.size = self.size
174 | self.g_fbo_texture = self.g_fbo.texture
175 | self.update_grid()
176 |
177 | def build_mapping(self, calibration=None):
178 | rows = self.rows
179 | cols = self.cols
180 | line_vertices = []
181 | line_indices = []
182 | ncols = float(cols)
183 | nrows = float(rows)
184 | i = 0
185 | for row in range(rows + 1):
186 | for col in range(cols + 1):
187 | if calibration:
188 | i = 2 * (col + row * (cols + 1))
189 | line_vertices += calibration[i:i + 2]
190 | line_vertices += [0, 0]
191 | else:
192 | line_vertices += [col / ncols, row / nrows, 0, 0]
193 | for row in range(rows):
194 | for col in range(cols):
195 | i = col + row * (cols + 1)
196 | line_indices += [i, i + 1]
197 | line_indices += [i, i + (cols + 1)]
198 | self.line_vertices = line_vertices
199 | self.line_indices = line_indices
200 |
201 | def get_calibration(self):
202 | calibration = []
203 | v = self.line_vertices
204 | for i in range(0, len(v), 4):
205 | calibration += v[i:i + 2]
206 | return calibration
207 |
208 | def build_grid(self):
209 | rows = self.rows
210 | cols = self.cols
211 | vertices = []
212 | indices = []
213 |
214 | dx = 1. / float(cols)
215 | dy = 1. / float(rows)
216 | for col in range(cols):
217 | x = col / float(cols)
218 | for row in range(rows):
219 | y = row / float(rows)
220 |
221 | # use line
222 | corners = []
223 | i = 4 * (col + row * (cols + 1))
224 | corners += self.line_vertices[i:i + 2]
225 | i = 4 * (col + (row + 1) * (cols + 1))
226 | corners += self.line_vertices[i:i + 2]
227 | i = 4 * (1 + col + row * (cols + 1))
228 | corners += self.line_vertices[i:i + 2]
229 | i = 4 * (1 + col + (row + 1) * (cols + 1))
230 | corners += self.line_vertices[i:i + 2]
231 |
232 | data = [
233 | x, y, cols, rows
234 | ]
235 |
236 | vertices.extend(corners[0:2])
237 | vertices.extend(corners)
238 | vertices.extend(data)
239 | vertices.extend(corners[2:4])
240 | vertices.extend(corners)
241 | vertices.extend(data)
242 | vertices.extend(corners[4:6])
243 | vertices.extend(corners)
244 | vertices.extend(data)
245 | vertices.extend(corners[6:8])
246 | vertices.extend(corners)
247 | vertices.extend(data)
248 |
249 | i = 0
250 | for col in range(cols):
251 | for row in range(rows):
252 | indices.extend((
253 | i, i + 3, i + 1,
254 | i, i + 2, i + 3))
255 | i += 4
256 |
257 | self.indices = indices
258 | self.vertices = vertices
259 | fmt = [
260 | (b'vPosition', 2, 'float'),
261 | (b'vQuad0', 2, 'float'),
262 | (b'vQuad1', 2, 'float'),
263 | (b'vQuad2', 2, 'float'),
264 | (b'vQuad3', 2, 'float'),
265 | (b'vTex0', 2, 'float'),
266 | (b'vSize', 2, 'float')
267 | ]
268 | fmtsize = 14
269 |
270 | if not hasattr(self, "g_mesh"):
271 | self.g_mesh = Mesh(
272 | indices=indices, vertices=vertices, mode="triangles",
273 | texture=self.g_fbo_texture,
274 | fmt=fmt
275 | )
276 | else:
277 | self.g_mesh.indices = indices
278 | self.g_mesh.vertices = vertices
279 |
280 | def update_grid(self):
281 | self.g_scale.x = self.width
282 | self.g_scale.y = self.height
283 | self.g_mesh.texture = self.g_fbo_texture
284 |
285 | def set_vertice(self, i, sx, sy):
286 | line_vertices = self.line_vertices
287 | line_vertices[i * 4] = sx
288 | line_vertices[i * 4 + 1] = sy
289 | self.build_grid()
290 |
291 |
292 | class ProjectionMappingCalibration(F.RelativeLayout):
293 | informations = StringProperty()
294 | show_help = BooleanProperty(True)
295 |
296 | def __init__(self, **kwargs):
297 | super(ProjectionMappingCalibration, self).__init__(**kwargs)
298 | self.g_canvas = None
299 |
300 | def rebuild_informations(self):
301 | self.informations = "\n".join([
302 | "[b]Projection Mapping[/b]",
303 | "Cols: {} - Rows: {}",
304 | "",
305 | "[b]Help[/b]",
306 | "F2: Toggle calibration",
307 | "space: Toggle help",
308 | "r: Reset the calibration grid",
309 | "s: Save the current calibration",
310 | "l: Load latest calibration",
311 | "x/c: Remove/add a column (current calibration is lost)",
312 | "v/b: Remove/add a row (current calibration is lost)"
313 | ]).format(
314 | self.grid.cols,
315 | self.grid.rows)
316 |
317 | def show_lines(self):
318 | indices = []
319 | grid = self.grid
320 | cols = grid.cols
321 | rows = grid.rows
322 | for col in range(grid.cols + 1):
323 | indices.extend((
324 | col * (rows + 1), col * (rows + 1) + rows,
325 | ))
326 | for row in range(grid.rows + 1):
327 | indices.extend((
328 | row, row + (cols * (rows + 1)),
329 | ))
330 |
331 | with self.canvas:
332 | self.g_canvas = Canvas()
333 |
334 | with self.g_canvas:
335 | Color(1, 0, 0, 0.5)
336 | PushMatrix()
337 | Scale(self.width, self.height, 1.)
338 | self.g_mesh = Mesh(
339 | vertices=self.grid.line_vertices,
340 | indices=self.grid.line_indices,
341 | mode="lines",
342 | source="projectionmapping/data/white.png")
343 | PopMatrix()
344 |
345 | self.rebuild_informations()
346 |
347 | def hide_lines(self):
348 | if self.g_canvas:
349 | self.canvas.remove(self.g_canvas)
350 | self.g_canvas = None
351 |
352 | def update_mesh(self):
353 | self.hide_lines()
354 | self.show_lines()
355 |
356 | def on_touch_down(self, touch):
357 | cols = self.grid.cols
358 | rows = self.grid.rows
359 |
360 | # select the nearest point
361 | v = self.grid.line_vertices
362 | vt = Vector(touch.sx, touch.sy)
363 | min_i = -1
364 | min_dist = float("inf")
365 | for i4 in range(0, len(v), 4):
366 | d = Vector(v[i4:i4 + 2]).distance(vt)
367 | if min_dist > d:
368 | min_dist = d
369 | min_i = i4 / 4
370 | touch.ud["i"] = int(min_i)
371 | touch.grab(self)
372 | return super(ProjectionMappingCalibration, self).on_touch_down(touch)
373 |
374 | def on_touch_move(self, touch):
375 | if touch.grab_current is self:
376 | self.grid.set_vertice(touch.ud["i"], touch.sx, touch.sy)
377 | self.update_mesh()
378 | return True
379 | return super(ProjectionMappingCalibration, self).on_touch_move(touch)
380 |
381 | def on_touch_up(self, touch):
382 | if touch.grab_current is self:
383 | self.grid.set_vertice(touch.ud["i"], touch.sx, touch.sy)
384 | self.update_mesh()
385 | return True
386 | return super(ProjectionMappingCalibration, self).on_touch_up(touch)
387 |
388 |
389 | class ProjectionMapping(F.RelativeLayout):
390 | def __init__(self, **kwargs):
391 | self.wid_container = self.wid_calibration = None
392 | self.filename = kwargs.pop("filename", "calibration.json")
393 | super(ProjectionMapping, self).__init__(**kwargs)
394 | self.wid_container = self.ids.container.__self__
395 | self.wid_calibration = self.ids.calibration.__self__
396 | self.remove_widget(self.wid_calibration)
397 | self.bind_keyboard()
398 | self.load_calibration()
399 |
400 | def save_calibration(self):
401 | data = {
402 | "rows": self.wid_container.rows,
403 | "cols": self.wid_container.cols,
404 | "calibration": self.wid_container.get_calibration()
405 | }
406 | with open(self.filename, "w") as fd:
407 | json.dump(data, fd)
408 | print("Calibration saved to {}".format(self.filename))
409 |
410 | def load_calibration(self):
411 | try:
412 | with open(self.filename, "r") as fd:
413 | data = json.load(fd)
414 | except Exception as e:
415 | print("ERROR: Unable to load {}: {!r}".format(
416 | self.filename, e))
417 | return
418 | self.wid_container.rows = data["rows"]
419 | self.wid_container.cols = data["cols"]
420 | self.wid_container.build_mapping(calibration=data["calibration"])
421 | self.wid_container.build_grid()
422 | if self.wid_calibration.parent:
423 | self.hide_projection()
424 | self.show_projection()
425 |
426 | def add_widget(self, widget):
427 | if self.wid_container:
428 | return self.wid_container.add_widget(widget)
429 | return super(ProjectionMapping, self).add_widget(widget)
430 |
431 | def remove_widget(self, widget):
432 | if widget in self.wid_container.children:
433 | return self.wid_container.remove_widget(widget)
434 | return super(ProjectionMapping, self).remove_widget(widget)
435 |
436 | def bind_keyboard(self):
437 | from kivy.core.window import Window
438 |
439 | def on_key_down(window, scancode, *largs):
440 | if scancode == 283:
441 | self.toggle_projection()
442 | return True
443 | if not self.wid_calibration.parent:
444 | return
445 | if scancode == 32: # space
446 | self.wid_calibration.show_help = not self.wid_calibration.show_help
447 | return True
448 | elif scancode in (120, 99, 118, 98, 114): # x, c, v, b, r
449 | if scancode == 120:
450 | self.wid_container.rows = max(1, self.wid_container.rows - 1)
451 | elif scancode == 99:
452 | self.wid_container.rows = self.wid_container.rows + 1
453 | elif scancode == 118:
454 | self.wid_container.cols = max(1, self.wid_container.cols - 1)
455 | elif scancode == 98:
456 | self.wid_container.cols = self.wid_container.cols + 1
457 | self.wid_container.build_mapping()
458 | self.wid_container.build_grid()
459 | self.hide_projection()
460 | self.show_projection()
461 | return True
462 | elif scancode == 115:
463 | self.save_calibration()
464 | return True
465 | elif scancode == 108:
466 | self.load_calibration()
467 | return True
468 |
469 | Window.bind(on_key_down=on_key_down)
470 |
471 | def toggle_projection(self):
472 | if self.wid_calibration.parent:
473 | self.hide_projection()
474 | else:
475 | self.show_projection()
476 |
477 | def hide_projection(self):
478 | super(ProjectionMapping, self).remove_widget(self.wid_calibration)
479 | self.wid_calibration.hide_lines()
480 |
481 | def show_projection(self):
482 | super(ProjectionMapping, self).add_widget(self.wid_calibration)
483 | self.wid_calibration.grid = self.wid_container
484 | self.wid_calibration.size = self.size
485 | self.wid_calibration.show_lines()
--------------------------------------------------------------------------------
/projectionmapping/data/mirefullhd.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/tito/projectionmapping/990162ac8dd3020c93517e7bc23730b401171752/projectionmapping/data/mirefullhd.jpg
--------------------------------------------------------------------------------
/projectionmapping/data/white.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/tito/projectionmapping/990162ac8dd3020c93517e7bc23730b401171752/projectionmapping/data/white.png
--------------------------------------------------------------------------------
7 |
8 | Projection to a curved wall:
9 |
10 | 
11 |
12 | ## Usage
13 |
14 | ```python
15 | from kivy.app import App
16 | from projectionmapping import ProjectionMapping
17 | from kivy.uix.image import Image
18 |
19 | class SimpleProjectionMapping(App):
20 | def build(self):
21 | self.root = ProjectionMapping(filename="calibration.json")
22 | self.root.add_widget(
23 | Image(source="projectionmapping/data/mirefullhd.jpg"))
24 | ```
25 |
26 | ## Keybinding
27 |
28 | - F2: Toggle calibration
29 | - space: Toggle help
30 | - r: Reset the calibration grid
31 | - s: Save the current calibration
32 | - l: Load latest calibration
33 | - x/c: Remove/add a column (current calibration is lost)
34 | - v/b: Remove/add a row (current calibration is lost)
35 |
36 | ## Resources
37 |
38 | - http://www.reedbeta.com/blog/quadrilateral-interpolation-part-2/
39 | - http://iquilezles.org/www/articles/ibilinear/ibilinear.htm
40 |
--------------------------------------------------------------------------------
/examples/simple.py:
--------------------------------------------------------------------------------
1 | import sys
2 | sys.path += ["."]
3 | from kivy.app import App
4 | from projectionmapping import ProjectionMapping
5 | from kivy.uix.image import Image
6 |
7 |
8 | class SimpleProjectionMapping(App):
9 | def build(self):
10 | self.root = ProjectionMapping(filename="calibration.json")
11 | self.root.add_widget(
12 | Image(source="projectionmapping/data/mirefullhd.jpg"))
13 |
14 | if __name__ == "__main__":
15 | SimpleProjectionMapping().run()
--------------------------------------------------------------------------------
/projectionmapping/__init__.py:
--------------------------------------------------------------------------------
1 | """
2 | Projection mapping
3 | ==================
4 |
5 | .. author:: Mathieu Virbel
6 |
7 | Grid-based Inverse Bilinear Projection
8 | """
9 |
10 | from kivy.factory import Factory as F
11 | from kivy.properties import StringProperty, BooleanProperty
12 | from kivy.graphics import (
13 | Fbo, Rectangle, Color, Mesh, PushMatrix, PopMatrix, Scale,
14 | Canvas, RenderContext, Translate)
15 | from kivy.graphics.transformation import Matrix
16 | from kivy.lang import Builder
17 | from kivy.vector import Vector
18 | import json
19 |
20 | FS = '''
21 | #ifdef GL_ES
22 | precision highp float;
23 | #endif
24 |
25 | /* Outputs from the vertex shader */
26 | varying vec4 frag_color;
27 | varying vec2 q, q0, b1, b2, b3, vsize;
28 |
29 | /* uniform texture samplers */
30 | uniform sampler2D texture0;
31 | uniform mat4 frag_modelview_mat;
32 |
33 | float Wedge2D(vec2 v, vec2 w) {
34 | return v.x * w.y - v.y * w.x;
35 | }
36 |
37 | void main (void){
38 | // Set up quadratic formula
39 | float A = Wedge2D(b2, b3);
40 | float B = Wedge2D(b3, q) - Wedge2D(b1, b2);
41 | float C = Wedge2D(b1, q);
42 |
43 | // Solve for v
44 | vec2 uv;
45 | if (abs(A) < 0.001) {
46 | // Linear form
47 | uv.y = -C / B;
48 | } else {
49 | // Quadratic form. Take positive root for CCW winding with V-up
50 | float discrim = B * B - 4. * A *C;
51 | uv.y = 0.5 * (-B + sqrt(discrim)) / A;
52 | }
53 |
54 | // Solve for u, using largest-magnitude component
55 | vec2 denom = b1 + uv.y * b3;
56 | if (abs(denom.x) > abs(denom.y))
57 | uv.x = (q.x - b2.x * uv.y) / denom.x;
58 | else
59 | uv.x = (q.y - b2.y * uv.y) / denom.y;
60 |
61 | uv.x /= vsize.y;
62 | uv.y /= vsize.x;
63 | uv.x += q0.y;
64 | uv.y += q0.x;
65 |
66 | gl_FragColor = frag_color * texture2D(texture0, vec2(uv.y, uv.x));
67 | }
68 | '''
69 |
70 | VS = '''
71 | #ifdef GL_ES
72 | precision highp float;
73 | #endif
74 |
75 | /* Outputs to the fragment shader */
76 | varying vec4 frag_color;
77 | varying vec2 q;
78 | varying vec2 q0;
79 | varying vec2 b1;
80 | varying vec2 b2;
81 | varying vec2 b3;
82 | varying vec2 vsize;
83 |
84 | /* vertex attributes */
85 | attribute vec2 vPosition;
86 | attribute vec2 vQuad0;
87 | attribute vec2 vQuad1;
88 | attribute vec2 vQuad2;
89 | attribute vec2 vQuad3;
90 | attribute vec2 vTex0;
91 | attribute vec2 vSize;
92 |
93 | /* uniform variables */
94 | uniform mat4 modelview_mat;
95 | uniform mat4 projection_mat;
96 | uniform vec4 color;
97 | uniform float opacity;
98 |
99 | void main (void) {
100 | q = vPosition - vQuad0;
101 | q0 = vTex0;
102 | b1 = vQuad1 - vQuad0;
103 | b2 = vQuad2 - vQuad0;
104 | b3 = vQuad0 - vQuad1 - vQuad2 + vQuad3;
105 | vsize = vSize;
106 | frag_color = color * vec4(1.0, 1.0, 1.0, opacity);
107 | gl_Position = projection_mat * modelview_mat * vec4(vPosition.xy, 0.0, 1.0);
108 | }
109 | '''
110 |
111 |
112 |
113 | Builder.load_string("""
114 | :
115 | Label:
116 | size_hint: None, None
117 | size: self.texture_size[0] + dp(20), self.texture_size[1] + dp(20)
118 | text: root.informations
119 | markup: True
120 | opacity: int(root.show_help)
121 | font_name: "data/fonts/RobotoMono-Regular.ttf"
122 | canvas.before:
123 | Color:
124 | rgba: 0, 0, 0, 0.7
125 | Rectangle:
126 | pos: self.pos
127 | size: self.size
128 |
129 | :
130 | ProjectionMappingGrid:
131 | id: container
132 | ProjectionMappingCalibration:
133 | id: calibration
134 | """)
135 |
136 |
137 | class ProjectionMappingGrid(F.RelativeLayout):
138 |
139 | def __init__(self, **kwargs):
140 | self.cols = self.rows = 2
141 | self.canvas = RenderContext(
142 | fs=FS, vs=VS,
143 | use_parent_projection=True,
144 | use_parent_modelview=True)
145 | super(ProjectionMappingGrid, self).__init__(**kwargs)
146 | self.build_mapping()
147 | self.init_fbo()
148 | self.bind(size=self.rebuild_fbo)
149 |
150 | def add_widget(self, widget):
151 | if widget not in self.children:
152 | self.children.append(widget)
153 | self.g_fbo.add(widget.canvas)
154 |
155 | def remove_widget(self, widget):
156 | if widget in self.children:
157 | self.children.remove(widget)
158 | self.g_fbo.remove(widget.canvas)
159 |
160 | def init_fbo(self):
161 | with self.canvas:
162 | Color(1, 1, 1)
163 | self.g_fbo = Fbo(size=self.size)
164 | self.g_fbo_texture = self.g_fbo.texture
165 | Color(1, 1, 1, 1)
166 | PushMatrix()
167 | self.g_scale = Scale(self.width / 2, self.height / 2, 1.)
168 | self.build_grid()
169 | PopMatrix()
170 |
171 | def rebuild_fbo(self, *largs):
172 | asp = self.width / float(self.height)
173 | self.g_fbo.size = self.size
174 | self.g_fbo_texture = self.g_fbo.texture
175 | self.update_grid()
176 |
177 | def build_mapping(self, calibration=None):
178 | rows = self.rows
179 | cols = self.cols
180 | line_vertices = []
181 | line_indices = []
182 | ncols = float(cols)
183 | nrows = float(rows)
184 | i = 0
185 | for row in range(rows + 1):
186 | for col in range(cols + 1):
187 | if calibration:
188 | i = 2 * (col + row * (cols + 1))
189 | line_vertices += calibration[i:i + 2]
190 | line_vertices += [0, 0]
191 | else:
192 | line_vertices += [col / ncols, row / nrows, 0, 0]
193 | for row in range(rows):
194 | for col in range(cols):
195 | i = col + row * (cols + 1)
196 | line_indices += [i, i + 1]
197 | line_indices += [i, i + (cols + 1)]
198 | self.line_vertices = line_vertices
199 | self.line_indices = line_indices
200 |
201 | def get_calibration(self):
202 | calibration = []
203 | v = self.line_vertices
204 | for i in range(0, len(v), 4):
205 | calibration += v[i:i + 2]
206 | return calibration
207 |
208 | def build_grid(self):
209 | rows = self.rows
210 | cols = self.cols
211 | vertices = []
212 | indices = []
213 |
214 | dx = 1. / float(cols)
215 | dy = 1. / float(rows)
216 | for col in range(cols):
217 | x = col / float(cols)
218 | for row in range(rows):
219 | y = row / float(rows)
220 |
221 | # use line
222 | corners = []
223 | i = 4 * (col + row * (cols + 1))
224 | corners += self.line_vertices[i:i + 2]
225 | i = 4 * (col + (row + 1) * (cols + 1))
226 | corners += self.line_vertices[i:i + 2]
227 | i = 4 * (1 + col + row * (cols + 1))
228 | corners += self.line_vertices[i:i + 2]
229 | i = 4 * (1 + col + (row + 1) * (cols + 1))
230 | corners += self.line_vertices[i:i + 2]
231 |
232 | data = [
233 | x, y, cols, rows
234 | ]
235 |
236 | vertices.extend(corners[0:2])
237 | vertices.extend(corners)
238 | vertices.extend(data)
239 | vertices.extend(corners[2:4])
240 | vertices.extend(corners)
241 | vertices.extend(data)
242 | vertices.extend(corners[4:6])
243 | vertices.extend(corners)
244 | vertices.extend(data)
245 | vertices.extend(corners[6:8])
246 | vertices.extend(corners)
247 | vertices.extend(data)
248 |
249 | i = 0
250 | for col in range(cols):
251 | for row in range(rows):
252 | indices.extend((
253 | i, i + 3, i + 1,
254 | i, i + 2, i + 3))
255 | i += 4
256 |
257 | self.indices = indices
258 | self.vertices = vertices
259 | fmt = [
260 | (b'vPosition', 2, 'float'),
261 | (b'vQuad0', 2, 'float'),
262 | (b'vQuad1', 2, 'float'),
263 | (b'vQuad2', 2, 'float'),
264 | (b'vQuad3', 2, 'float'),
265 | (b'vTex0', 2, 'float'),
266 | (b'vSize', 2, 'float')
267 | ]
268 | fmtsize = 14
269 |
270 | if not hasattr(self, "g_mesh"):
271 | self.g_mesh = Mesh(
272 | indices=indices, vertices=vertices, mode="triangles",
273 | texture=self.g_fbo_texture,
274 | fmt=fmt
275 | )
276 | else:
277 | self.g_mesh.indices = indices
278 | self.g_mesh.vertices = vertices
279 |
280 | def update_grid(self):
281 | self.g_scale.x = self.width
282 | self.g_scale.y = self.height
283 | self.g_mesh.texture = self.g_fbo_texture
284 |
285 | def set_vertice(self, i, sx, sy):
286 | line_vertices = self.line_vertices
287 | line_vertices[i * 4] = sx
288 | line_vertices[i * 4 + 1] = sy
289 | self.build_grid()
290 |
291 |
292 | class ProjectionMappingCalibration(F.RelativeLayout):
293 | informations = StringProperty()
294 | show_help = BooleanProperty(True)
295 |
296 | def __init__(self, **kwargs):
297 | super(ProjectionMappingCalibration, self).__init__(**kwargs)
298 | self.g_canvas = None
299 |
300 | def rebuild_informations(self):
301 | self.informations = "\n".join([
302 | "[b]Projection Mapping[/b]",
303 | "Cols: {} - Rows: {}",
304 | "",
305 | "[b]Help[/b]",
306 | "F2: Toggle calibration",
307 | "space: Toggle help",
308 | "r: Reset the calibration grid",
309 | "s: Save the current calibration",
310 | "l: Load latest calibration",
311 | "x/c: Remove/add a column (current calibration is lost)",
312 | "v/b: Remove/add a row (current calibration is lost)"
313 | ]).format(
314 | self.grid.cols,
315 | self.grid.rows)
316 |
317 | def show_lines(self):
318 | indices = []
319 | grid = self.grid
320 | cols = grid.cols
321 | rows = grid.rows
322 | for col in range(grid.cols + 1):
323 | indices.extend((
324 | col * (rows + 1), col * (rows + 1) + rows,
325 | ))
326 | for row in range(grid.rows + 1):
327 | indices.extend((
328 | row, row + (cols * (rows + 1)),
329 | ))
330 |
331 | with self.canvas:
332 | self.g_canvas = Canvas()
333 |
334 | with self.g_canvas:
335 | Color(1, 0, 0, 0.5)
336 | PushMatrix()
337 | Scale(self.width, self.height, 1.)
338 | self.g_mesh = Mesh(
339 | vertices=self.grid.line_vertices,
340 | indices=self.grid.line_indices,
341 | mode="lines",
342 | source="projectionmapping/data/white.png")
343 | PopMatrix()
344 |
345 | self.rebuild_informations()
346 |
347 | def hide_lines(self):
348 | if self.g_canvas:
349 | self.canvas.remove(self.g_canvas)
350 | self.g_canvas = None
351 |
352 | def update_mesh(self):
353 | self.hide_lines()
354 | self.show_lines()
355 |
356 | def on_touch_down(self, touch):
357 | cols = self.grid.cols
358 | rows = self.grid.rows
359 |
360 | # select the nearest point
361 | v = self.grid.line_vertices
362 | vt = Vector(touch.sx, touch.sy)
363 | min_i = -1
364 | min_dist = float("inf")
365 | for i4 in range(0, len(v), 4):
366 | d = Vector(v[i4:i4 + 2]).distance(vt)
367 | if min_dist > d:
368 | min_dist = d
369 | min_i = i4 / 4
370 | touch.ud["i"] = int(min_i)
371 | touch.grab(self)
372 | return super(ProjectionMappingCalibration, self).on_touch_down(touch)
373 |
374 | def on_touch_move(self, touch):
375 | if touch.grab_current is self:
376 | self.grid.set_vertice(touch.ud["i"], touch.sx, touch.sy)
377 | self.update_mesh()
378 | return True
379 | return super(ProjectionMappingCalibration, self).on_touch_move(touch)
380 |
381 | def on_touch_up(self, touch):
382 | if touch.grab_current is self:
383 | self.grid.set_vertice(touch.ud["i"], touch.sx, touch.sy)
384 | self.update_mesh()
385 | return True
386 | return super(ProjectionMappingCalibration, self).on_touch_up(touch)
387 |
388 |
389 | class ProjectionMapping(F.RelativeLayout):
390 | def __init__(self, **kwargs):
391 | self.wid_container = self.wid_calibration = None
392 | self.filename = kwargs.pop("filename", "calibration.json")
393 | super(ProjectionMapping, self).__init__(**kwargs)
394 | self.wid_container = self.ids.container.__self__
395 | self.wid_calibration = self.ids.calibration.__self__
396 | self.remove_widget(self.wid_calibration)
397 | self.bind_keyboard()
398 | self.load_calibration()
399 |
400 | def save_calibration(self):
401 | data = {
402 | "rows": self.wid_container.rows,
403 | "cols": self.wid_container.cols,
404 | "calibration": self.wid_container.get_calibration()
405 | }
406 | with open(self.filename, "w") as fd:
407 | json.dump(data, fd)
408 | print("Calibration saved to {}".format(self.filename))
409 |
410 | def load_calibration(self):
411 | try:
412 | with open(self.filename, "r") as fd:
413 | data = json.load(fd)
414 | except Exception as e:
415 | print("ERROR: Unable to load {}: {!r}".format(
416 | self.filename, e))
417 | return
418 | self.wid_container.rows = data["rows"]
419 | self.wid_container.cols = data["cols"]
420 | self.wid_container.build_mapping(calibration=data["calibration"])
421 | self.wid_container.build_grid()
422 | if self.wid_calibration.parent:
423 | self.hide_projection()
424 | self.show_projection()
425 |
426 | def add_widget(self, widget):
427 | if self.wid_container:
428 | return self.wid_container.add_widget(widget)
429 | return super(ProjectionMapping, self).add_widget(widget)
430 |
431 | def remove_widget(self, widget):
432 | if widget in self.wid_container.children:
433 | return self.wid_container.remove_widget(widget)
434 | return super(ProjectionMapping, self).remove_widget(widget)
435 |
436 | def bind_keyboard(self):
437 | from kivy.core.window import Window
438 |
439 | def on_key_down(window, scancode, *largs):
440 | if scancode == 283:
441 | self.toggle_projection()
442 | return True
443 | if not self.wid_calibration.parent:
444 | return
445 | if scancode == 32: # space
446 | self.wid_calibration.show_help = not self.wid_calibration.show_help
447 | return True
448 | elif scancode in (120, 99, 118, 98, 114): # x, c, v, b, r
449 | if scancode == 120:
450 | self.wid_container.rows = max(1, self.wid_container.rows - 1)
451 | elif scancode == 99:
452 | self.wid_container.rows = self.wid_container.rows + 1
453 | elif scancode == 118:
454 | self.wid_container.cols = max(1, self.wid_container.cols - 1)
455 | elif scancode == 98:
456 | self.wid_container.cols = self.wid_container.cols + 1
457 | self.wid_container.build_mapping()
458 | self.wid_container.build_grid()
459 | self.hide_projection()
460 | self.show_projection()
461 | return True
462 | elif scancode == 115:
463 | self.save_calibration()
464 | return True
465 | elif scancode == 108:
466 | self.load_calibration()
467 | return True
468 |
469 | Window.bind(on_key_down=on_key_down)
470 |
471 | def toggle_projection(self):
472 | if self.wid_calibration.parent:
473 | self.hide_projection()
474 | else:
475 | self.show_projection()
476 |
477 | def hide_projection(self):
478 | super(ProjectionMapping, self).remove_widget(self.wid_calibration)
479 | self.wid_calibration.hide_lines()
480 |
481 | def show_projection(self):
482 | super(ProjectionMapping, self).add_widget(self.wid_calibration)
483 | self.wid_calibration.grid = self.wid_container
484 | self.wid_calibration.size = self.size
485 | self.wid_calibration.show_lines()
--------------------------------------------------------------------------------
/projectionmapping/data/mirefullhd.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/tito/projectionmapping/990162ac8dd3020c93517e7bc23730b401171752/projectionmapping/data/mirefullhd.jpg
--------------------------------------------------------------------------------
/projectionmapping/data/white.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/tito/projectionmapping/990162ac8dd3020c93517e7bc23730b401171752/projectionmapping/data/white.png
--------------------------------------------------------------------------------