├── .gitignore
├── feature_extraction
├── w2c.mat
├── get_features.m
├── initial_net.m
├── get_cn.m
├── get_gray.m
├── get_fhog.m
├── get_saliency.m
├── get_deep.m
├── im2c.m
├── get_feature_map.m
├── imResample.m
├── fhog.m
└── get_handcrafted.m
├── results
├── overlap_OPE_UAVDT.png
└── overlap_OPE_UAV123.png
├── external_libs
├── gradientMex.mexw64
├── mexResize.mexw64
├── mtimesx
│ ├── mtimesx.c
│ ├── mtimesx.m
│ ├── mtimesx.mexa64
│ ├── mtimesx.mexw64
│ ├── license.txt
│ ├── mtimesx_sparse.m
│ ├── mtimesx_test_nd.m
│ └── mtimesx_build.m
├── opencv_core242.dll
├── imResampleMex.mexa64
├── imResampleMex.mexw64
├── opencv_imgproc242.dll
└── imResampleMex.cpp
├── seq
├── data_seq
│ └── wakeboard7
│ │ ├── 000001.jpg
│ │ ├── 000002.jpg
│ │ ├── 000003.jpg
│ │ ├── 000004.jpg
│ │ ├── 000005.jpg
│ │ ├── 000006.jpg
│ │ ├── 000007.jpg
│ │ ├── 000008.jpg
│ │ ├── 000009.jpg
│ │ ├── 000010.jpg
│ │ ├── 000011.jpg
│ │ ├── 000012.jpg
│ │ ├── 000013.jpg
│ │ ├── 000014.jpg
│ │ ├── 000015.jpg
│ │ ├── 000016.jpg
│ │ ├── 000017.jpg
│ │ ├── 000018.jpg
│ │ ├── 000019.jpg
│ │ ├── 000020.jpg
│ │ ├── 000021.jpg
│ │ ├── 000022.jpg
│ │ ├── 000023.jpg
│ │ ├── 000024.jpg
│ │ ├── 000025.jpg
│ │ ├── 000026.jpg
│ │ ├── 000027.jpg
│ │ ├── 000028.jpg
│ │ ├── 000029.jpg
│ │ ├── 000030.jpg
│ │ ├── 000031.jpg
│ │ ├── 000032.jpg
│ │ ├── 000033.jpg
│ │ ├── 000034.jpg
│ │ ├── 000035.jpg
│ │ ├── 000036.jpg
│ │ ├── 000037.jpg
│ │ ├── 000038.jpg
│ │ ├── 000039.jpg
│ │ ├── 000040.jpg
│ │ ├── 000041.jpg
│ │ ├── 000042.jpg
│ │ ├── 000043.jpg
│ │ ├── 000044.jpg
│ │ ├── 000045.jpg
│ │ ├── 000046.jpg
│ │ ├── 000047.jpg
│ │ ├── 000048.jpg
│ │ ├── 000049.jpg
│ │ ├── 000050.jpg
│ │ ├── 000051.jpg
│ │ ├── 000052.jpg
│ │ ├── 000053.jpg
│ │ ├── 000054.jpg
│ │ ├── 000055.jpg
│ │ ├── 000056.jpg
│ │ ├── 000057.jpg
│ │ ├── 000058.jpg
│ │ ├── 000059.jpg
│ │ ├── 000060.jpg
│ │ ├── 000061.jpg
│ │ ├── 000062.jpg
│ │ ├── 000063.jpg
│ │ ├── 000064.jpg
│ │ ├── 000065.jpg
│ │ ├── 000066.jpg
│ │ └── 000067.jpg
└── anno
│ └── wakeboard7.txt
├── UAV123_utils
├── load_video_info_UAV123.m
├── load_video_information.m
├── choose_video_UAV.m
├── precision_plot_save.m
└── configSeqs.m
├── implementation
├── tran_filter
│ ├── update_model.m
│ ├── predict_position.m
│ ├── gaussian_correlation_v2.m
│ ├── floor_odd.m
│ ├── myHann.m
│ ├── adaptive_weight.m
│ ├── getP.m
│ ├── gaussianResponse.m
│ ├── linear_correlation.m
│ ├── sigmoid_correlation.m
│ ├── cropFilterResponse.m
│ ├── getColourMap.m
│ ├── polynomial_correlation.m
│ ├── mergeResponses.m
│ ├── computeHistogram.m
│ ├── gaussian_correlation.m
│ ├── getCenterLikelihood.m
│ ├── getSubwindow.m
│ └── updateHistModel.m
├── scale_filter
│ ├── scale_update_model.m
│ ├── scale_adaptation_init.m
│ ├── gaussian_correlation_scale_single.m
│ ├── affparaminv.m
│ ├── affwarpimg.m
│ ├── affparam2mat.m
│ ├── warpimg.m
│ ├── affparam2geom.m
│ ├── getScaleSubwindow.m
│ ├── getScalePatch.m
│ ├── scale_search.m
│ └── getScaleSubwindow_v1.m
├── initialization
│ └── initializeAllAreas.m
├── tri_attention
│ ├── position_attention
│ │ ├── pos_attention.m
│ │ └── pos_pre.m
│ ├── dimension_attention
│ │ ├── normalize_img.m
│ │ └── localmax_nonmaxsup2d.m
│ └── context_attention
│ │ └── calPMER.m
└── tracker.m
├── setup_paths.m
├── TACF_Demo.m
├── readme.md
└── run_TACF.m
/.gitignore:
--------------------------------------------------------------------------------
1 | external_libs/matconvnet/
2 | model/
3 | Test*/
4 | archive/
5 | *.asv
--------------------------------------------------------------------------------
/feature_extraction/w2c.mat:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/feature_extraction/w2c.mat
--------------------------------------------------------------------------------
/results/overlap_OPE_UAVDT.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/results/overlap_OPE_UAVDT.png
--------------------------------------------------------------------------------
/external_libs/gradientMex.mexw64:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/gradientMex.mexw64
--------------------------------------------------------------------------------
/external_libs/mexResize.mexw64:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/mexResize.mexw64
--------------------------------------------------------------------------------
/external_libs/mtimesx/mtimesx.c:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/mtimesx/mtimesx.c
--------------------------------------------------------------------------------
/external_libs/mtimesx/mtimesx.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/mtimesx/mtimesx.m
--------------------------------------------------------------------------------
/external_libs/opencv_core242.dll:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/opencv_core242.dll
--------------------------------------------------------------------------------
/results/overlap_OPE_UAV123.png:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/results/overlap_OPE_UAV123.png
--------------------------------------------------------------------------------
/external_libs/imResampleMex.mexa64:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/imResampleMex.mexa64
--------------------------------------------------------------------------------
/external_libs/imResampleMex.mexw64:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/imResampleMex.mexw64
--------------------------------------------------------------------------------
/feature_extraction/get_features.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/feature_extraction/get_features.m
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000001.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000001.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000002.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000002.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000003.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000003.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000004.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000004.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000005.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000005.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000006.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000006.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000007.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000007.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000008.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000008.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000009.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000009.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000010.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000010.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000011.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000011.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000012.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000012.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000013.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000013.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000014.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000014.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000015.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000015.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000016.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000016.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000017.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000017.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000018.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000018.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000019.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000019.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000020.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000020.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000021.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000021.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000022.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000022.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000023.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000023.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000024.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000024.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000025.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000025.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000026.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000026.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000027.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000027.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000028.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000028.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000029.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000029.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000030.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000030.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000031.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000031.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000032.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000032.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000033.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000033.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000034.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000034.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000035.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000035.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000036.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000036.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000037.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000037.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000038.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000038.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000039.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000039.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000040.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000040.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000041.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000041.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000042.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000042.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000043.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000043.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000044.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000044.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000045.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000045.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000046.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000046.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000047.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000047.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000048.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000048.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000049.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000049.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000050.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000050.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000051.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000051.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000052.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000052.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000053.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000053.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000054.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000054.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000055.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000055.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000056.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000056.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000057.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000057.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000058.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000058.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000059.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000059.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000060.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000060.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000061.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000061.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000062.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000062.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000063.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000063.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000064.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000064.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000065.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000065.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000066.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000066.jpg
--------------------------------------------------------------------------------
/seq/data_seq/wakeboard7/000067.jpg:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/seq/data_seq/wakeboard7/000067.jpg
--------------------------------------------------------------------------------
/UAV123_utils/load_video_info_UAV123.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/UAV123_utils/load_video_info_UAV123.m
--------------------------------------------------------------------------------
/external_libs/mtimesx/mtimesx.mexa64:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/mtimesx/mtimesx.mexa64
--------------------------------------------------------------------------------
/external_libs/mtimesx/mtimesx.mexw64:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/mtimesx/mtimesx.mexw64
--------------------------------------------------------------------------------
/external_libs/opencv_imgproc242.dll:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/external_libs/opencv_imgproc242.dll
--------------------------------------------------------------------------------
/implementation/tran_filter/update_model.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/tran_filter/update_model.m
--------------------------------------------------------------------------------
/implementation/tran_filter/predict_position.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/tran_filter/predict_position.m
--------------------------------------------------------------------------------
/implementation/scale_filter/scale_update_model.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/scale_filter/scale_update_model.m
--------------------------------------------------------------------------------
/implementation/initialization/initializeAllAreas.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/initialization/initializeAllAreas.m
--------------------------------------------------------------------------------
/implementation/scale_filter/scale_adaptation_init.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/scale_filter/scale_adaptation_init.m
--------------------------------------------------------------------------------
/implementation/tran_filter/gaussian_correlation_v2.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/tran_filter/gaussian_correlation_v2.m
--------------------------------------------------------------------------------
/implementation/tran_filter/floor_odd.m:
--------------------------------------------------------------------------------
1 | %% We want odd regions so that the central pixel can be exact
2 | function y = floor_odd(x)
3 | y = 2*floor((x-1) / 2) + 1;
4 | end
--------------------------------------------------------------------------------
/implementation/tri_attention/position_attention/pos_attention.m:
--------------------------------------------------------------------------------
https://raw.githubusercontent.com/vision4robotics/TACF-Tracker/HEAD/implementation/tri_attention/position_attention/pos_attention.m
--------------------------------------------------------------------------------
/implementation/tran_filter/myHann.m:
--------------------------------------------------------------------------------
1 | %% Reimplementation of Hann window (in case signal processing toolbox is missing)
2 | function H = myHann(X)
3 | H = .5*(1 - cos(2*pi*(0:X-1)'/(X-1)));
4 | end
--------------------------------------------------------------------------------
/setup_paths.m:
--------------------------------------------------------------------------------
1 | function setup_paths()
2 |
3 | % Add the neccesary paths
4 | [pathstr,~,~] = fileparts(mfilename('fullpath'));
5 | addpath(genpath([pathstr '/utils/']));
6 | addpath(genpath([pathstr '/implementation/']));
7 | addpath(genpath([pathstr '/feature_extraction/']));
8 | addpath(genpath([pathstr '/external_libs/']));
9 |
10 | end
--------------------------------------------------------------------------------
/implementation/scale_filter/gaussian_correlation_scale_single.m:
--------------------------------------------------------------------------------
1 | function kf = gaussian_correlation_scale_single(base, y, sigma)
2 |
3 | k = zeros(1,size(base,2));
4 | N = numel(y);
5 | for i =1:size(base,2)
6 | n = sum(sum(sum((base(:,i) - y).^2)))/N^2;
7 | k(i) = exp(-n / sigma^2 ) ;
8 | end
9 |
10 | kf = fft(k');
11 | end
12 |
--------------------------------------------------------------------------------
/implementation/tri_attention/dimension_attention/normalize_img.m:
--------------------------------------------------------------------------------
1 | function out = normalize_img(img)
2 | % normalize the 2d matrix
3 | % code borrow from CSRDCF
4 |
5 | min_val = min(img(:));
6 | max_val = max(img(:));
7 |
8 | if (max_val - min_val) > 0
9 | out = (img - min_val)/(max_val - min_val);
10 | else
11 | out = zeros(size(img));
12 | end
13 |
14 | end % endfunction
--------------------------------------------------------------------------------
/implementation/tran_filter/adaptive_weight.m:
--------------------------------------------------------------------------------
1 | function weight = adaptive_weight(response)
2 |
3 | response_temp = response;
4 | max_response = max(response_temp(:));
5 | avg_response = mean(response_temp(:));
6 | std_response = std(response_temp(:));
7 |
8 | % weight = (max_response - avg_response)/ std_response;
9 |
10 | weight = 1 - exp(- (max_response - avg_response)^2 ./ (2 * std_response) );
11 | end
--------------------------------------------------------------------------------
/feature_extraction/initial_net.m:
--------------------------------------------------------------------------------
1 | function initial_net()
2 | % INITIAL_NET: Loading VGG-Net-19
3 |
4 | global net;
5 | net = load(fullfile('model', 'imagenet-vgg-verydeep-19.mat'));
6 | % Remove the fully connected layers and classification layer
7 | net.layers(37+1:end) = [];
8 |
9 | % Switch to GPU mode
10 | global enableGPU;
11 | if enableGPU
12 | net = vl_simplenn_move(net, 'gpu');
13 | end
14 |
15 | end
--------------------------------------------------------------------------------
/UAV123_utils/load_video_information.m:
--------------------------------------------------------------------------------
1 | function seq = load_video_information(type)
2 |
3 | switch type
4 | case 'UAV123_10fps'
5 | database_folder = 'seq\data_seq';
6 | ground_truth_folder = 'seq\anno';
7 | video_name = choose_video_UAV(ground_truth_folder);
8 | seq = load_video_info_UAV123(video_name, database_folder, ground_truth_folder, type);
9 | seq.video_name = video_name;
10 | end
--------------------------------------------------------------------------------
/implementation/tran_filter/getP.m:
--------------------------------------------------------------------------------
1 | function P = getP(histogram, h, w, bin_indices, grayscale_sequence)
2 | %GETP computes the scores given the histogram
3 | % query the hist for the probability of each pixel
4 | if grayscale_sequence
5 | hist_indices = bin_indices;
6 | else
7 | hist_indices = sub2ind(size(histogram), bin_indices(:,1), bin_indices(:,2), bin_indices(:,3));
8 | end
9 |
10 | % shape it as a matrix
11 | P = reshape(histogram(hist_indices), h, w);
12 | end
--------------------------------------------------------------------------------
/implementation/scale_filter/affparaminv.m:
--------------------------------------------------------------------------------
1 | function q = affparaminv(p,q)
2 | % function q = affparaminv(p[, q])
3 | %
4 | % p(6,n) : [dx dy sc th sr phi]'
5 | % q(6,n) : [q(1) q(3) q(4); q(2) q(5) q(6)]
6 |
7 | % Copyright (C) Jongwoo Lim and David Ross. All rights reserved.
8 |
9 | if (length(p) == 6)
10 | p = p(:);
11 | end
12 | if (nargin > 1)
13 | q = ([p(3) p(4); p(5) p(6)]) \ [q(1)-p(1) q(3:4); q(2)-p(2) q(5:6)];
14 | else
15 | q = ([p(3) p(4); p(5) p(6)]) \ [-p(1) 1 0; -p(2) 0 1];
16 | end
17 | q = q([1,2,3,5,4,6]);
18 |
--------------------------------------------------------------------------------
/feature_extraction/get_cn.m:
--------------------------------------------------------------------------------
1 | function feature_image = get_cn( im, fparam, gparam )
2 |
3 | [im_height, im_width, ~, num_images] = size(im);
4 | % [im_height, im_width, num_im_chan, num_images] = size(im);
5 | temp = zeros(floor(im_height/gparam.cell_size), floor(im_width/gparam.cell_size));
6 | feature_image = zeros(size(temp,1), size(temp,2), fparam.nDim, num_images);
7 |
8 | for k = 1:num_images
9 | im_temp = mexResize(im(:,:,:,k), [size(temp,1) size(temp,2)],'auto');
10 | cn_image = im2c(double(im_temp(:,:,:)),gparam.w2c_mat.w2c,-2);
11 | feature_image(:,:,:,k) = cn_image;
12 | end
--------------------------------------------------------------------------------
/implementation/tri_attention/dimension_attention/localmax_nonmaxsup2d.m:
--------------------------------------------------------------------------------
1 | function [local_max] = localmax_nonmaxsup2d(response)
2 | % find local 1st and 2nd maximum in 2d matrix
3 | % code borrow from CSRDCF
4 |
5 | BW = imregionalmax(response);
6 | CC = bwconncomp(BW);
7 |
8 | local_max = [max(response(:)) 0];
9 | if length(CC.PixelIdxList) > 1
10 | local_max = zeros(length(CC.PixelIdxList));
11 | for i = 1:length(CC.PixelIdxList)
12 | local_max(i) = response(CC.PixelIdxList{i}(1));
13 | end
14 | local_max = sort(local_max, 'descend');
15 | end
16 |
17 | end % endfunction
--------------------------------------------------------------------------------
/implementation/tran_filter/gaussianResponse.m:
--------------------------------------------------------------------------------
1 | function y = gaussianResponse(rect_size, sigma)
2 | %GAUSSIANRESPONSE create the (fixed) target response of the correlation filter response
3 | half = floor((rect_size-1) / 2);
4 | i_range = -half(1):half(1);
5 | j_range = -half(2):half(2);
6 | [i, j] = ndgrid(i_range, j_range);
7 | i_mod_range = mod_one(i_range, rect_size(1));
8 | j_mod_range = mod_one(j_range, rect_size(2));
9 | y = zeros(rect_size);
10 | y(i_mod_range, j_mod_range) = exp(-(i.^2 + j.^2) / (2 * sigma^2));
11 | end
12 |
13 | function y = mod_one(a, b)
14 | y = mod(a-1, b)+1;
15 | end
16 |
--------------------------------------------------------------------------------
/feature_extraction/get_gray.m:
--------------------------------------------------------------------------------
1 | function feature_image = get_gray( im, fparam, gparam )
2 |
3 | [im_height, im_width, ~, num_images] = size(im);
4 | % [im_height, im_width, num_im_chan, num_images] = size(im);
5 | temp = zeros(floor(im_height/gparam.cell_size), floor(im_width/gparam.cell_size));
6 | feature_image = zeros(size(temp,1), size(temp,2), fparam.nDim, num_images);
7 |
8 | for k = 1:num_images
9 | tic
10 | im_gray = rgb2gray(im(:,:,:,k));
11 | im_gray2= double(im_gray)/255;
12 | im_gray2 = im_gray2 - mean(im_gray2(:));
13 | feature_image(:,:,1,k) = mexResize(im_gray2, [size(temp,1),size(temp,2)],'auto');
14 | end
--------------------------------------------------------------------------------
/implementation/tran_filter/linear_correlation.m:
--------------------------------------------------------------------------------
1 | function kf = linear_correlation(xf, yf)
2 | %LINEAR_CORRELATION Linear Kernel at all shifts, i.e. correlation.
3 | % Computes the dot-product for all relative shifts between input images
4 | % X and Y, which must both be MxN. They must also be periodic (ie.,
5 | % pre-processed with a cosine window). The result is an MxN map of
6 | % responses.
7 | %
8 | % Inputs and output are all in the Fourier domain.
9 | %
10 | % Joao F. Henriques, 2014
11 | % http://www.isr.uc.pt/~henriques/
12 |
13 | %cross-correlation term in Fourier domain
14 | kf = sum(xf .* conj(yf), 3) / numel(xf);
15 |
16 | end
17 |
18 |
--------------------------------------------------------------------------------
/implementation/tri_attention/position_attention/pos_pre.m:
--------------------------------------------------------------------------------
1 | function pre_output = pos_pre(R, win)
2 |
3 | % dimension axis sum
4 | R_win = bsxfun(@times, R, win);
5 | pos_sum = sum(R_win,3);
6 | map_norm = normalize_img(pos_sum);
7 | map_mean = map_norm - mean(map_norm(:));
8 | map = max(map_mean,0);
9 | pre_output = exp(map)-0.5;
10 |
11 | end
12 |
13 | function out = normalize_img(img)
14 | % normalize the 2d matrix
15 | % code borrow from CSRDCF
16 |
17 | min_val = min(img(:));
18 | max_val = max(img(:));
19 |
20 | if (max_val - min_val) > 0
21 | out = (img - min_val)/(max_val - min_val);
22 | else
23 | out = zeros(size(img));
24 | end
25 |
26 | end % endfunction
--------------------------------------------------------------------------------
/implementation/scale_filter/affwarpimg.m:
--------------------------------------------------------------------------------
1 | function wimg = affwarpimg(img, p, sz)
2 | % function wimg = affwarpimg(img, p, sz)
3 | %
4 | % img(h,w)
5 | % p(6,n) : mat format affine parameter
6 | % sz(th,tw)
7 | %
8 |
9 | %% Copyright (C) Jongwoo Lim and David Ross.
10 | %% All rights reserved.
11 |
12 |
13 | if (nargin < 3)
14 | sz = size(img);
15 | end
16 | if (size(p,1) == 1)
17 | p = p(:);
18 | end
19 | w = sz(2); h = sz(1); n = size(p,2);
20 | [x,y] = meshgrid(1:w, 1:h);
21 | pos = reshape(cat(2, ones(h*w,1),x(:),y(:)) ...
22 | * [p(1,:) p(2,:); p(3:4,:) p(5:6,:)], [h,w,n,2]);
23 | wimg = squeeze(interp2(img, pos(:,:,:,1), pos(:,:,:,2)));
24 | wimg(isnan(wimg)) = 0;
25 |
--------------------------------------------------------------------------------
/implementation/scale_filter/affparam2mat.m:
--------------------------------------------------------------------------------
1 | function q = affparam2mat(p)
2 |
3 | % Copyright (C) Jongwoo Lim and David Ross. All rights reserved.
4 |
5 |
6 | sz = size(p);
7 | if (length(p(:)) == 6)
8 | p = p(:);
9 | end
10 | s = p(3,:); th = p(4,:); r = p(5,:); phi = p(6,:);
11 | cth = cos(th); sth = sin(th); cph = cos(phi); sph = sin(phi);
12 | ccc = cth.*cph.*cph; ccs = cth.*cph.*sph; css = cth.*sph.*sph;
13 | scc = sth.*cph.*cph; scs = sth.*cph.*sph; sss = sth.*sph.*sph;
14 | q(1,:) = p(1,:); q(2,:) = p(2,:);
15 | q(3,:) = s.*(ccc +scs +r.*(css -scs)); q(4,:) = s.*(r.*(ccs -scc) -ccs -sss);
16 | q(5,:) = s.*(scc -ccs +r.*(ccs +sss)); q(6,:) = s.*(r.*(ccc +scs) -scs +css);
17 | q = reshape(q, sz);
18 |
--------------------------------------------------------------------------------
/feature_extraction/get_fhog.m:
--------------------------------------------------------------------------------
1 | function feature_image = get_fhog( im, fparam, gparam )
2 | %extract fhog features using piotrs toolbox. Currently takes no parameters
3 | %except hog-cell-size
4 | if ~isfield(fparam, 'nOrients')
5 | fparam.nOrients = 9;
6 | end
7 |
8 | [im_height, im_width, ~, num_images] = size(im);
9 | % [im_height, im_width, num_im_chan, num_images] = size(im);
10 | feature_image = zeros(floor(im_height/gparam.cell_size), floor(im_width/gparam.cell_size), fparam.nDim, num_images, 'single');
11 |
12 | for k = 1:num_images
13 | hog_image = double(fhog(single(im(:,:,:,k)) / 255, gparam.cell_size, fparam.nOrients));
14 | %the last dimension is all 0 so we can discard it
15 | feature_image(:,:,:,k) = hog_image(:,:,1:end-1);
16 | end
--------------------------------------------------------------------------------
/implementation/scale_filter/warpimg.m:
--------------------------------------------------------------------------------
1 | function wimg = warpimg(img, p, sz)
2 | %% Copyright (C) 2005 Jongwoo Lim and David Ross.
3 | %% All rights reserved.
4 |
5 | if (nargin < 3)
6 | sz = size(img);
7 | end
8 | if (size(p,1) == 1)
9 | p = p(:);
10 | end
11 | w = sz(2); h = sz(1); n = size(p,2);
12 | [x,y] = meshgrid((1:w)-w/2, (1:h)-h/2);
13 | pos = reshape(cat(2, ones(h*w,1),x(:),y(:)) ...
14 | * [p(1,:) p(2,:); p(3:4,:) p(5:6,:)], [h,w,n,2]);
15 | wimg = squeeze(interp2(img, pos(:,:,:,1), pos(:,:,:,2)));
16 |
17 |
18 | wimg(isnan(wimg)) = 0;
19 |
20 | % B = SQUEEZE(A) returns an array B with the same elements as
21 | % A but with all the singleton dimensions removed. A singleton
22 | % is a dimension such that size(A,dim)==1;
23 |
24 |
--------------------------------------------------------------------------------
/implementation/tri_attention/context_attention/calPMER.m:
--------------------------------------------------------------------------------
1 | function PMER = calPMER(response)
2 |
3 | % Calculates the PMER (Peak-Median Energy Ratio) of the response map
4 | % in order to obtain a measure of peak strength
5 |
6 | % load('sample_data/correlation_mat');
7 |
8 | % Get location of the max and min peak
9 | [xmax, ymax] = ind2sub(size(response),find(response == max(response(:)), 1));
10 |
11 | % Get max and min peak value
12 | res_max = response(xmax,ymax);
13 | res_med = median(response(:));
14 |
15 | % Peak sharpness of the response map
16 | num = (res_max - res_med)^2;
17 |
18 | % Overall fluctuations of the response map
19 | fluc_map = (response - res_med).^ 2;
20 | den = mean(fluc_map(:)); % version1
21 | % den = std(fluc_map(:)); % version2
22 |
23 | PMER = num / den;
24 | end
25 |
--------------------------------------------------------------------------------
/implementation/tran_filter/sigmoid_correlation.m:
--------------------------------------------------------------------------------
1 | function kf = sigmoid_correlation(xf, yf, sigma, c)
2 | %SIGMOID_CORRELATION Polynomial Kernel at all shifts, i.e. kernel correlation.
3 | % Evaluates a polynomial kernel with constant A and exponent B, for all
4 | % relative shifts between input images XF and YF, which must both be MxN.
5 | % They must also be periodic (ie., pre-processed with a cosine window).
6 | % The result is an MxN map of responses.
7 | %
8 | % Inputs and output are all in the Fourier domain.
9 |
10 | %cross-correlation term in Fourier domain
11 | xyf = xf .* conj(yf);
12 | xy = sum(real(ifft2(xyf)), 3); %to spatial domain
13 |
14 | %calculate polynomial response for all positions, then go back to the
15 | %Fourier domain
16 | kf = fft2(tanh(sigma * xy / numel(xf) + c));
17 |
18 | end
19 |
20 |
--------------------------------------------------------------------------------
/implementation/tran_filter/cropFilterResponse.m:
--------------------------------------------------------------------------------
1 | function new_response = cropFilterResponse(response_cf, response_size)
2 | %CROPFILTERRESPONSE makes RESPONSE_CF of size RESPONSE_SIZE (i.e. same size of colour response)
3 |
4 | [h,w] = size(response_cf);
5 | b = response_size(1);
6 | a = response_size(2);
7 |
8 | % a and b must be odd, as we want an exact center
9 | % if ~all_odd([a, b])
10 | % error('dimensions must be odd');
11 | % end
12 | half_width = floor(a/2);
13 | half_height = floor(b/2);
14 |
15 | new_response = response_cf(...
16 | mod_one(-half_height:half_height, h), ...
17 | mod_one(-half_width:half_width, w));
18 | end
19 |
20 | function y = mod_one(a, b)
21 | y = mod(a-1, b)+1;
22 | end
23 |
24 | function y = all_odd(x)
25 | y = all(mod(x, 2) == 1);
26 | end
27 |
--------------------------------------------------------------------------------
/implementation/scale_filter/affparam2geom.m:
--------------------------------------------------------------------------------
1 | function q = affparam2geom(p)
2 |
3 | % Copyright (C) Jongwoo Lim and David Ross. All rights reserved.
4 |
5 | A = [ p(3), p(4); p(5), p(6) ];
6 |
7 | [U,S,V] = svd(A);
8 | if (det(U) < 0)
9 | U = U(:,2:-1:1); V = V(:,2:-1:1); S = S(2:-1:1,2:-1:1);
10 | end
11 |
12 |
13 | q(1) = p(1);
14 | q(2) = p(2);
15 |
16 |
17 | q(4) = atan2(U(2,1)*V(1,1)+U(2,2)*V(1,2), U(1,1)*V(1,1)+U(1,2)*V(1,2));
18 |
19 | phi = atan2(V(1,2),V(1,1));
20 | if (phi <= -pi/2)
21 | c = cos(-pi/2); s = sin(-pi/2);
22 | R = [c -s; s c]; V = V * R; S = R'*S*R;
23 | end
24 | if (phi >= pi/2)
25 | c = cos(pi/2); s = sin(pi/2);
26 | R = [c -s; s c]; V = V * R; S = R'*S*R;
27 | end
28 |
29 |
30 | q(3) = S(1,1);
31 | q(5) = S(2,2)/S(1,1);
32 |
33 | q(6) = atan2(V(1,2),V(1,1));
34 |
35 | q = reshape(q, size(p));
36 |
--------------------------------------------------------------------------------
/implementation/tran_filter/getColourMap.m:
--------------------------------------------------------------------------------
1 | function [P_O] = getColourMap(patch, bg_hist, fg_hist, n_bins, grayscale_sequence)
2 | %% GETCOLOURMAP computes pixel-wise probabilities (PwP) given PATCH and models BG_HIST and FG_HIST
3 | % check whether the patch has 3 channels
4 | [h, w, d] = size(patch);
5 | % figure out which bin each pixel falls into
6 | bin_width = 256/n_bins;
7 | % convert image to d channels array
8 | patch_array = reshape(double(patch), w*h, d);
9 | % to which bin each pixel (for all d channels) belongs to
10 | bin_indices = floor(patch_array/bin_width) + 1;
11 | % Get pixel-wise posteriors (PwP)
12 | P_bg = getP(bg_hist, h, w, bin_indices, grayscale_sequence);
13 | P_fg = getP(fg_hist, h, w, bin_indices, grayscale_sequence);
14 |
15 | % Object-likelihood map
16 | P_O = P_fg ./ (P_fg + P_bg);
17 | end
18 |
--------------------------------------------------------------------------------
/implementation/tran_filter/polynomial_correlation.m:
--------------------------------------------------------------------------------
1 | function kf = polynomial_correlation(xf, yf, a, b)
2 | %POLYNOMIAL_CORRELATION Polynomial Kernel at all shifts, i.e. kernel correlation.
3 | % Evaluates a polynomial kernel with constant A and exponent B, for all
4 | % relative shifts between input images XF and YF, which must both be MxN.
5 | % They must also be periodic (ie., pre-processed with a cosine window).
6 | % The result is an MxN map of responses.
7 | %
8 | % Inputs and output are all in the Fourier domain.
9 | %
10 | % Joao F. Henriques, 2014
11 | % http://www.isr.uc.pt/~henriques/
12 |
13 | %cross-correlation term in Fourier domain
14 | xyf = xf .* conj(yf);
15 | xy = sum(real(ifft2(xyf)), 3); %to spatial domain
16 |
17 | %calculate polynomial response for all positions, then go back to the
18 | %Fourier domain
19 | kf = fft2((xy / numel(xf) + a) .^ b);
20 |
21 | end
22 |
23 |
--------------------------------------------------------------------------------
/implementation/tran_filter/mergeResponses.m:
--------------------------------------------------------------------------------
1 | function [response] = mergeResponses(response_cf, response_pwp, alpha, merge_method)
2 | %MERGERESPONSES interpolates the two responses with the hyperparameter ALPHA
3 | if strcmp(merge_method, 'const_factor')
4 | response = (1 - alpha) * response_cf + alpha * response_pwp;
5 | end
6 |
7 | if strcmp(merge_method, 'fit_gaussian')
8 | [~, cov2D_cf] = fitGaussian(response_cf);
9 | [~, cov2D_pwp] = fitGaussian(response_pwp);
10 | response_u = ones(size(response_cf));
11 | [~, cov2D_u] = fitGaussian(response_u);
12 | w_cf = 1 - sqrt(det(cov2D_cf)/det(cov2D_u));
13 | w_pwp = 1 - sqrt(det(cov2D_pwp)/det(cov2D_u));
14 | sum_cf_pwp = w_cf + w_pwp;
15 | w_cf = w_cf / sum_cf_pwp;
16 | w_pwp = w_pwp / sum_cf_pwp;
17 |
18 | response = w_cf * response_cf + w_pwp * response_pwp;
19 | fprintf('w_cf: %.3f w_pwp: %.3f\n', w_cf, w_pwp);
20 | end
21 | end
22 |
--------------------------------------------------------------------------------
/feature_extraction/get_saliency.m:
--------------------------------------------------------------------------------
1 | function feature_image = get_saliency( im, fparam, gparam )
2 |
3 | [im_height, im_width, ~, num_images] = size(im);
4 | % [im_height, im_width, num_im_chan, num_images] = size(im);
5 | temp = zeros(floor(im_height/gparam.cell_size), floor(im_width/gparam.cell_size), fparam.nDim, num_images, 'single');
6 | feature_image = zeros(size(temp,1), size(temp,2), fparam.nDim, num_images);
7 |
8 | for k = 1:num_images
9 | rgb=imresize(im(:,:,:,k),gparam.factor);
10 | myFFT = fft2(rgb);
11 | myLogAmplitude = log(abs(myFFT));
12 | myPhase = angle(myFFT);
13 | mySpectralResidual = myLogAmplitude - imfilter(myLogAmplitude, fspecial('average', 3), 'replicate');
14 | saliencyMap = abs(ifft2(exp(mySpectralResidual + 1i*myPhase))).^2;
15 | saliencyMap = mat2gray(imfilter(saliencyMap, fspecial('gaussian', [10, 10], 2.5)));
16 | im_saliency = saliencyMap;
17 | feature_image(:,:,:,k) = mexResize(im_saliency, [size(temp,1) size(temp,2)],'auto');
18 | end
--------------------------------------------------------------------------------
/implementation/tran_filter/computeHistogram.m:
--------------------------------------------------------------------------------
1 | function histogram = computeHistogram(patch, mask, n_bins, grayscale_sequence)
2 | %COMPUTEHISTOGRAM creates a colour (or grayscale) histogram of an image patch
3 | % MASK has the same size as the image patch and selects what should
4 | % be used when computing the histogram (i.e. out-of-frame regions are ignored)
5 |
6 | [h, w, d] = size(patch);
7 |
8 | assert(all([h w]==size(mask)) == 1, 'mask and image are not the same size');
9 |
10 | bin_width = 256/n_bins;
11 |
12 | % convert image to 1d array with same n channels of img patch
13 | patch_array = reshape(double(patch), w*h, d);
14 | % compute to which bin each pixel (for all 3 channels) belongs to
15 | bin_indices = floor(patch_array/bin_width) + 1;
16 |
17 | if grayscale_sequence
18 | histogram = accumarray(bin_indices, mask(:), [n_bins 1])/sum(mask(:));
19 | else
20 | % the histogram is a cube of side n_bins
21 | histogram = accumarray(bin_indices, mask(:), [n_bins n_bins n_bins])/sum(mask(:));
22 | end
23 |
24 | end
25 |
--------------------------------------------------------------------------------
/implementation/tran_filter/gaussian_correlation.m:
--------------------------------------------------------------------------------
1 | function kf = gaussian_correlation(xf, yf, sigma)
2 | %GAUSSIAN_CORRELATION Gaussian Kernel at all shifts, i.e. kernel correlation.
3 | % Evaluates a Gaussian kernel with bandwidth SIGMA for all relative
4 | % shifts between input images X and Y, which must both be MxN. They must
5 | % also be periodic (ie., pre-processed with a cosine window). The result
6 | % is an MxN map of responses.
7 | %
8 | % Inputs and output are all in the Fourier domain.
9 | %
10 | % Joao F. Henriques, 2014
11 | % http://www.isr.uc.pt/~henriques/
12 |
13 | N = size(xf,1) * size(xf,2);
14 | xx = xf(:)' * xf(:) / N; %squared norm of x
15 | yy = yf(:)' * yf(:) / N; %squared norm of y
16 |
17 | %cross-correlation term in Fourier domain
18 | xyf = xf .* conj(yf);
19 | xy = sum(real(ifft2(xyf)), 3); %to spatial domain
20 |
21 | %calculate gaussian response for all positions, then go back to the
22 | %Fourier domain
23 | kf = fft2(exp(-1 / sigma^2 * (xx + yy - 2 * xy) / numel(xf)));
24 |
25 | end
26 |
27 |
--------------------------------------------------------------------------------
/TACF_Demo.m:
--------------------------------------------------------------------------------
1 | function TACF_Demo(~)
2 | close all;
3 | clear;
4 | clc;
5 |
6 | %% **Need to change**
7 | type_of_assessment = 'UAV123_10fps';
8 | tracker_name = 'TACF';
9 | %% Load video information
10 | addpath(genpath('./UAV123_utils/'));
11 | seq = load_video_information(type_of_assessment);
12 |
13 | % main function
14 | result = run_TACF(seq);
15 |
16 | % save results
17 | results = cell(1,1);
18 | results{1} = result;
19 | results{1}.len = seq.len;
20 | results{1}.startFrame = seq.st_frame;
21 | results{1}.annoBegin = seq.st_frame;
22 |
23 | % save results to specified folder
24 | save_dir = '.\Test_one_seq\';
25 | save_res_dir = [save_dir, tracker_name, '_results\'];
26 | save_pic_dir = [save_res_dir, 'res_picture\'];
27 | if ~exist(save_res_dir, 'dir')
28 | mkdir(save_res_dir);
29 | mkdir(save_pic_dir);
30 | end
31 | save([save_res_dir, seq.video_name, '_', tracker_name], 'results');
32 |
33 | % plot precision figure
34 | show_visualization = 1;
35 | precision_plot_save(results{1}.res, seq.ground_truth, seq.video_name, save_pic_dir, show_visualization);
--------------------------------------------------------------------------------
/feature_extraction/get_deep.m:
--------------------------------------------------------------------------------
1 | function feature_image = get_deep(im, fparam, gparam, layerInd)
2 | % Extract deep features from VGG
3 |
4 | global net
5 | global enableGPU
6 |
7 | if isempty(net)
8 | initial_net();
9 | end
10 |
11 | layers = fparam.layers(layerInd);
12 |
13 | [im_height, im_width, ~, num_images] = size(im);
14 | temp = zeros(floor(im_height/gparam.cell_size), floor(im_width/gparam.cell_size));
15 | sz_window = size(temp);
16 |
17 | feature_image = zeros(size(temp,1), size(temp,2), fparam.nDim(layerInd), num_images);
18 |
19 | for k = 1:num_images
20 | im_temp = single(im(:,:,:,k)); % note: [0, 255] range
21 | im_temp = imResample(im_temp, net.normalization.imageSize(1:2));
22 | im_temp = im_temp - net.normalization.averageImage;
23 | if enableGPU
24 | im_temp = gpuArray(im_temp);
25 | end
26 | % Run the CNN
27 | res = vl_simplenn(net,im_temp);
28 |
29 | if enableGPU
30 | x = gather(res(layers(1)).x);
31 | else
32 | x = res(layers(1)).x;
33 | end
34 | x = imResample(x, sz_window(1:2));
35 | featuremap = x;
36 | feature_image(:,:,:,k) = featuremap;
37 | end
38 | end
--------------------------------------------------------------------------------
/implementation/tran_filter/getCenterLikelihood.m:
--------------------------------------------------------------------------------
1 | function center_likelihood = getCenterLikelihood(object_likelihood, m)
2 | %GETCENTERLIKELIHOOD computes the sum over rectangles of size M.
3 | % CENTER_LIKELIHOOD is the 'colour response'
4 | [h,w] = size(object_likelihood);
5 | n1 = h - m(1) + 1;
6 | n2 = w - m(2) + 1;
7 |
8 | %% integral images
9 | % compute summed area table
10 | % SAT = zeros(h, w);
11 | % for y=1:h
12 | % for x=1:w
13 | % if x>1, SAT_left = SAT(y,x-1);
14 | % else SAT_left = 0; end
15 | % if y>1, SAT_up = SAT(y-1,x);
16 | % else SAT_up = 0; end
17 | % if y>1 && x>1, SAT_left_up = SAT(y-1,x-1);
18 | % else SAT_left_up = 0; end
19 | %
20 | % SAT(y,x) = object_likelihood(y,x) + SAT_left + SAT_up - SAT_left_up;
21 | % end
22 | % end
23 | % SAT = padarray(SAT,[1 1], 'pre');
24 |
25 | %% equivalent MATLAB function
26 | SAT = integralImage(object_likelihood);
27 | i = 1:n1;
28 | j = 1:n2;
29 | center_likelihood = (SAT(i,j) + SAT(i+m(1), j+m(2)) - SAT(i+m(1), j) - SAT(i, j+m(2))) / prod(m);
30 | end
31 |
--------------------------------------------------------------------------------
/seq/anno/wakeboard7.txt:
--------------------------------------------------------------------------------
1 | 623,299,11,38
2 | 624,296,11,38
3 | 624,293,11,38
4 | 624,290,11,38
5 | 622,286,11,41
6 | 621,284,12,41
7 | 622,277,12,44
8 | 625,271,12,44
9 | 627,265,12,44
10 | 632,257,13,46
11 | 640,250,13,46
12 | 648,243,13,48
13 | 654,236,13,48
14 | 660,229,13,48
15 | 664,225,13,48
16 | 667,219,13,48
17 | 669,213,13,48
18 | 672,203,13,50
19 | 675,197,14,51
20 | 684,189,15,53
21 | 693,184,15,55
22 | 701,175,16,50
23 | 706,169,17,48
24 | 709,163,17,54
25 | 709,162,17,55
26 | 709,160,17,57
27 | 709,159,18,63
28 | 714,159,22,66
29 | 720,164,24,64
30 | 726,167,24,64
31 | 729,169,24,64
32 | 733,170,24,65
33 | 733,171,28,65
34 | 734,170,30,64
35 | 736,165,31,65
36 | 738,162,33,64
37 | 743,157,35,65
38 | 745,150,38,62
39 | 747,143,41,64
40 | 763,141,39,64
41 | 774,138,39,63
42 | 786,134,38,63
43 | 800,131,41,61
44 | 814,130,41,64
45 | 826,128,43,64
46 | 842,127,42,65
47 | 857,128,42,65
48 | 873,127,45,65
49 | 884,128,45,64
50 | 893,131,45,64
51 | 897,138,45,64
52 | 894,144,43,62
53 | 888,153,43,61
54 | 886,159,42,61
55 | 888,168,41,59
56 | 895,177,41,59
57 | 905,189,39,58
58 | 924,204,38,57
59 | 940,222,38,57
60 | 959,241,35,53
61 | 965,255,35,56
62 | 961,265,36,54
63 | 955,275,34,54
64 | 947,282,34,54
65 | 939,290,32,54
66 | 935,296,32,52
67 | 940,303,30,52
68 |
--------------------------------------------------------------------------------
/implementation/scale_filter/getScaleSubwindow.m:
--------------------------------------------------------------------------------
1 | function out = getScaleSubwindow(im, pos, base_target_sz, scale_factors, scale_window, scale_model_sz, hog_scale_cell_size)
2 | % code from DSST
3 |
4 | num_scales = length(scale_factors);
5 |
6 | for s = 1:num_scales
7 | patch_sz = floor(base_target_sz * scale_factors(s));
8 | %make sure the size is not to small
9 | patch_sz = max(patch_sz, 2);
10 |
11 | xs = floor(pos(2)) + (1:patch_sz(2)) - floor(patch_sz(2)/2);
12 | ys = floor(pos(1)) + (1:patch_sz(1)) - floor(patch_sz(1)/2);
13 |
14 | %check for out-of-bounds coordinates, and set them to the values at the borders
15 | xs(xs < 1) = 1;
16 | ys(ys < 1) = 1;
17 | xs(xs > size(im,2)) = size(im,2);
18 | ys(ys > size(im,1)) = size(im,1);
19 |
20 | %extract image
21 | im_patch = im(ys, xs, :);
22 |
23 | % resize image to model size
24 | im_patch_resized = mexResize(im_patch, scale_model_sz, 'auto');
25 |
26 | % extract scale features
27 | temp_hog = fhog(single(im_patch_resized), hog_scale_cell_size);
28 | temp = temp_hog(:,:,1:31);
29 |
30 | if s == 1
31 | out = zeros(numel(temp), num_scales, 'single');
32 | end
33 |
34 | % window
35 | out(:,s) = temp(:) * scale_window(s);
36 | end
37 |
--------------------------------------------------------------------------------
/external_libs/mtimesx/license.txt:
--------------------------------------------------------------------------------
1 | Copyright (c) 2011, James Tursa
2 | All rights reserved.
3 |
4 | Redistribution and use in source and binary forms, with or without
5 | modification, are permitted provided that the following conditions are
6 | met:
7 |
8 | * Redistributions of source code must retain the above copyright
9 | notice, this list of conditions and the following disclaimer.
10 | * Redistributions in binary form must reproduce the above copyright
11 | notice, this list of conditions and the following disclaimer in
12 | the documentation and/or other materials provided with the distribution
13 |
14 | THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
15 | AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
16 | IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
17 | ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
18 | LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
19 | CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
20 | SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
21 | INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
22 | CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
23 | ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
24 | POSSIBILITY OF SUCH DAMAGE.
25 |
--------------------------------------------------------------------------------
/feature_extraction/im2c.m:
--------------------------------------------------------------------------------
1 | function out=im2c(im,w2c,color)
2 | % input im should be DOUBLE !
3 | % color=0 is color names out
4 | % color=-1 is colored image with color names out
5 | % color=1-11 is prob of colorname=color out;
6 | % color=-1 return probabilities
7 | % order of color names: black , blue , brown , grey , green , orange , pink , purple , red , white , yellow
8 | color_values = { [0 0 0] , [0 0 1] , [.5 .4 .25] , [.5 .5 .5] , [0 1 0] , [1 .8 0] , [1 .5 1] , [1 0 1] , [1 0 0] , [1 1 1 ] , [ 1 1 0 ] };
9 |
10 | if(nargin<3)
11 | color=0;
12 | end
13 |
14 | RR=im(:,:,1);GG=im(:,:,2);BB=im(:,:,3);
15 |
16 | index_im = 1+floor(RR(:)/8)+32*floor(GG(:)/8)+32*32*floor(BB(:)/8);
17 |
18 | if(color==0)
19 | [~,w2cM]=max(w2c,[],2);
20 | out=reshape(w2cM(index_im(:)),size(im,1),size(im,2));
21 | end
22 |
23 | if(color>0 && color < 12)
24 | w2cM=w2c(:,color);
25 | out=reshape(w2cM(index_im(:)),size(im,1),size(im,2));
26 | end
27 |
28 | if(color==-1)
29 | out=im;
30 | [~,w2cM]=max(w2c,[],2);
31 | out2=reshape(w2cM(index_im(:)),size(im,1),size(im,2));
32 |
33 | for jj=1:size(im,1)
34 | for ii=1:size(im,2)
35 | out(jj,ii,:)=color_values{out2(jj,ii)}'*255;
36 | end
37 | end
38 | end
39 |
40 | if(color==-2)
41 | out=reshape(w2c(index_im,:),size(im,1),size(im,2),size(w2c,2));
42 | end
43 |
--------------------------------------------------------------------------------
/implementation/tran_filter/getSubwindow.m:
--------------------------------------------------------------------------------
1 | function im_patch = getSubwindow(im, pos, model_sz, scaled_sz)
2 | %GET_SUBWINDOW Obtain image sub-window, padding is done by replicating border values.
3 | % Returns sub-window of image IM centered at POS ([y, x] coordinates),
4 | % with size MODEL_SZ ([height, width]). If any pixels are outside of the image,
5 | % they will replicate the values at the borders
6 |
7 | % with 3 input, no scale. With 4 params, scale adaptation
8 | if nargin < 4, sz = model_sz;
9 | else, sz = scaled_sz;
10 | end
11 |
12 | %make sure the size is not to small
13 | sz = max(sz, 2);
14 | %if sz(1) < 1, sz(1) = 2; end;
15 | %if sz(2) < 1, sz(2) = 2; end;
16 |
17 | %xs = floor(pos(2)) + (1:sz(2)) - floor(sz(2)/2);
18 | %ys = floor(pos(1)) + (1:sz(1)) - floor(sz(1)/2);
19 | xs = round(pos(2) + (1:sz(2)) - sz(2)/2);
20 | ys = round(pos(1) + (1:sz(1)) - sz(1)/2);
21 |
22 | %check for out-of-bounds coordinates, and set them to the values at
23 | %the borders
24 | xs(xs < 1) = 1;
25 | ys(ys < 1) = 1;
26 | xs(xs > size(im,2)) = size(im,2);
27 | ys(ys > size(im,1)) = size(im,1);
28 |
29 | %extract image
30 | im_patch_original = im(ys, xs, :);
31 |
32 | % (if rescaling is introduced) resize image to model size
33 | % im_patch = imresize(im_patch, model_sz, 'bilinear');
34 | if nargin>=4
35 | % im_patch = mexResize(im_patch_original, model_sz, 'auto');
36 | im_patch = mexResize(im_patch_original, model_sz, 'auto');
37 | else
38 | im_patch = im_patch_original;
39 | end
40 |
41 | end
42 |
43 |
--------------------------------------------------------------------------------
/UAV123_utils/choose_video_UAV.m:
--------------------------------------------------------------------------------
1 | function video_name = choose_video_UAV(base_path)
2 | %CHOOSE_VIDEO
3 | % Allows the user to choose a video (groundtruth.txt in the given path).
4 | %
5 | % Joao F. Henriques, 2014
6 | % http://www.isr.uc.pt/~henriques/
7 | %
8 | % Modified by Fuling Lin (fuling.lin@outlook.com)
9 | %
10 | %process path to make sure it's uniform
11 | if ispc(), base_path = strrep(base_path, '\', '/'); end
12 | if base_path(end) ~= '/', base_path(end+1) = '/'; end
13 |
14 | %list all sub-folders
15 | dirOutput = dir(fullfile(base_path, '*.txt'));
16 | contents = {dirOutput.name}';
17 | names = {};
18 | for k = 1:numel(contents),
19 | name = contents{k}(1:end-4);
20 | names{end+1} = name;
21 | end
22 |
23 | %===================================================================
24 | % uncomment following scripts if you test on the entire benchmark
25 | % names(strcmpi('Jogging', names)) = [];
26 | % names(end+1:end+2) = {'Jogging.1', 'Jogging.2'};
27 | %
28 | % names(strcmpi('Skating2', names)) = [];
29 | % names(end+1:end+2) = {'Skating2.1', 'Skating2.2'};
30 | %===================================================================
31 |
32 | %no sub-folders found
33 | if isempty(names), video_name = []; return; end
34 |
35 | %choice GUI
36 | choice = listdlg('ListString',names, 'Name','Choose video', 'SelectionMode','single');
37 |
38 | if isempty(choice), %user cancelled
39 | video_name = [];
40 | else
41 | video_name = names{choice};
42 | end
43 |
44 | end
45 |
46 |
--------------------------------------------------------------------------------
/implementation/scale_filter/getScalePatch.m:
--------------------------------------------------------------------------------
1 | function out = getScalePatch(img, pos, target_size, search_size, ~, ~, hog_scale_cell_size)
2 | % function out = getScalePatch(img, pos, target_size, search_size, scale_window, scale_model_sz, hog_scale_cell_size)
3 | % KCC: Kernel Cross-Correlator
4 | % Visual Tracking Using KCC
5 | %
6 | % Copyright (C) 2017
7 | % Author: Wang Chen wang.chen@zoho.com Nanyang Technological University
8 | % Zhang Le zhang.le@adsc.com Advanced Digital Sciences Center
9 | %
10 | % This file is part of KCC.
11 | %
12 | % KCC is free software: you can redistribute it and/or modify
13 | % it under the terms of the GNU General Public License as published by
14 | % the Free Software Foundation, either version 3 of the License, or
15 | % (at your option) any later version.
16 | %
17 | % KCC is distributed in the hope that it will be useful,
18 | % but WITHOUT ANY WARRANTY; without even the implied warranty of
19 | % MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
20 | % GNU General Public License for more details.
21 | %
22 | % You should have received a copy of the GNU General Public License
23 | % along with KCC. If not, see .
24 |
25 | padding=0;
26 | if size(img,3)>1
27 | img= single(rgb2gray(img))/255.0;
28 | end
29 |
30 | tmp_sz = floor((target_size * (1 + padding))*search_size);
31 | param0 = [pos(2), pos(1), tmp_sz(2)/target_size(2), 0,...
32 | tmp_sz(1)/target_size(2)/(target_size(1)/target_size(2)),0];
33 | param0 = affparam2mat(param0);
34 | patch = warpimg(double(img), param0, target_size);
35 | patch = fhog(single(patch), hog_scale_cell_size);
36 | patch = patch(:,:,1:31);
37 | out = patch(:);
38 |
39 |
40 |
41 |
42 |
--------------------------------------------------------------------------------
/implementation/scale_filter/scale_search.m:
--------------------------------------------------------------------------------
1 | function [target_sz, bg_area,fg_area,area_resize_factor] = scale_search(p,im, pos, base_target_sz, scale_factor, scale_window, scale_model_sz, im_patch_scale, model_hf, min_scale_factor, max_scale_factor, avg_dim_factor, scale_factors)
2 |
3 | if p.scale_adaptation
4 | current_patch = getScalePatch(im, pos, base_target_sz, scale_factor, scale_window, scale_model_sz, p.hog_scale_cell_size);
5 | ksf = gaussian_correlation_scale_single(im_patch_scale, current_patch, p.scale_sigma);
6 | scale_response = abs(ifft((model_hf.*ksf)));
7 | [~, recovered_scale] = max(scale_response(:));
8 |
9 | %set the scale
10 | scale_factor = scale_factor / scale_factors(recovered_scale);
11 | % fprintf('frame %d: recovered scale is %.2f:, current sclae factor is %.2f:\n', frame,recovered_scale,scale_factor)
12 |
13 | if scale_factor < min_scale_factor
14 | scale_factor = min_scale_factor;
15 | elseif scale_factor > max_scale_factor
16 | scale_factor = max_scale_factor;
17 | end
18 |
19 | % use new scale to update bboxes for target, filter, bg and fg models
20 | target_sz = round(base_target_sz * scale_factor);
21 | avg_dim = sum(target_sz)/avg_dim_factor;
22 | bg_area = round(target_sz + avg_dim);
23 | if(bg_area(2)>size(im,2)), bg_area(2)=size(im,2)-1; end
24 | if(bg_area(1)>size(im,1)), bg_area(1)=size(im,1)-1; end
25 |
26 | bg_area = bg_area - mod(bg_area - target_sz, 2);
27 | fg_area = round(target_sz - avg_dim * p.inner_padding);
28 | fg_area = fg_area + mod(bg_area - fg_area, 2);
29 | % Compute the rectangle with (or close to) params.fixed_area and
30 | % same aspect ratio as the target bboxgetScaleSubwindow_v1
31 | area_resize_factor = sqrt(p.fixed_area/prod(bg_area));
32 | end
--------------------------------------------------------------------------------
/implementation/tran_filter/updateHistModel.m:
--------------------------------------------------------------------------------
1 | function [bg_hist_new, fg_hist_new] = updateHistModel(new_model, patch, bg_area, fg_area, target_sz, norm_area, n_bins, grayscale_sequence, bg_hist, fg_hist, learning_rate_pwp)
2 | %UPDATEHISTMODEL create new models for foreground and background or update the current ones
3 |
4 | % Get BG (frame around target_sz) and FG masks (inner portion of target_sz)
5 | pad_offset1 = (bg_area-target_sz)/2; % we constrained the difference to be mod2, so we do not have to round here
6 | % assert(sum(pad_offset1==round(pad_offset1))==2, 'difference between bg_area and target_sz has to be even.');
7 |
8 | bg_mask = true(bg_area); % init bg_mask
9 | pad_offset1(pad_offset1<=0)=1;
10 | bg_mask(pad_offset1(1)+1:end-pad_offset1(1), pad_offset1(2)+1:end-pad_offset1(2)) = false;
11 |
12 | pad_offset2 = (bg_area-fg_area)/2; % we constrained the difference to be mod2, so we do not have to round here
13 | % assert(sum(pad_offset2==round(pad_offset2))==2, 'difference between bg_area and fg_area has to be even.');
14 | fg_mask = false(bg_area); % init fg_mask
15 | pad_offset2(pad_offset2<=0)=1;
16 | fg_mask(pad_offset2(1)+1:end-pad_offset2(1), pad_offset2(2)+1:end-pad_offset2(2)) = true;
17 |
18 | fg_mask = mexResize(fg_mask, norm_area, 'auto');
19 | bg_mask = mexResize(bg_mask, norm_area, 'auto');
20 |
21 | %% (TRAIN) BUILD THE MODEL
22 | if new_model
23 | % from scratch (frame=1)
24 | bg_hist_new = computeHistogram(patch, bg_mask, n_bins, grayscale_sequence);
25 | fg_hist_new = computeHistogram(patch, fg_mask, n_bins, grayscale_sequence);
26 | else
27 | % update the model
28 | bg_hist_new = (1 - learning_rate_pwp)*bg_hist + learning_rate_pwp*computeHistogram(patch, bg_mask, n_bins, grayscale_sequence);
29 | fg_hist_new = (1 - learning_rate_pwp)*fg_hist + learning_rate_pwp*computeHistogram(patch, fg_mask, n_bins, grayscale_sequence);
30 | end
31 |
32 | end
--------------------------------------------------------------------------------
/feature_extraction/get_feature_map.m:
--------------------------------------------------------------------------------
1 | function out = get_feature_map(im_patch, features, w2c)
2 |
3 | % out = get_feature_map(im_patch, features, w2c)
4 | %
5 | % Extracts the given features from the image patch. w2c is the
6 | % Color Names matrix, if used.
7 |
8 | if nargin < 3
9 | w2c = [];
10 | end
11 |
12 | % the names of the features that can be used
13 | valid_features = {'gray', 'cn'};
14 |
15 | % the dimension of the valid features
16 | feature_levels = [1 10]';
17 |
18 | num_valid_features = length(valid_features);
19 | used_features = false(num_valid_features, 1);
20 |
21 | % get the used features
22 | for i = 1:num_valid_features
23 | used_features(i) = any(strcmpi(valid_features{i}, features));
24 | end
25 |
26 | % total number of used feature levels
27 | num_feature_levels = sum(feature_levels .* used_features);
28 |
29 | level = 0;
30 |
31 | % If grayscale image
32 | if size(im_patch, 3) == 1
33 | % Features that are available for grayscale sequances
34 |
35 | % Grayscale values (image intensity)
36 | out = single(im_patch)/255 - 0.5;
37 | else
38 | % Features that are available for color sequances
39 |
40 | % allocate space (for speed)
41 | out = zeros(size(im_patch, 1), size(im_patch, 2), num_feature_levels, 'single');
42 |
43 | % Grayscale values (image intensity)
44 | if used_features(1)
45 | out(:,:,level+1) = single(rgb2gray(im_patch))/255 - 0.5;
46 | level = level + feature_levels(1);
47 | end
48 |
49 | % Color Names
50 | if used_features(2)
51 | if isempty(w2c)
52 | % load the RGB to color name matrix if not in input
53 | temp = load('w2crs');
54 | w2c = temp.w2crs;
55 | end
56 |
57 | % extract color descriptor
58 | out(:,:,level+(1:10)) = im2c(single(im_patch), w2c, -2);
59 | % level = level + feature_levels(2);
60 | end
61 | end
--------------------------------------------------------------------------------
/UAV123_utils/precision_plot_save.m:
--------------------------------------------------------------------------------
1 | function precisions = precision_plot_save(positions, ground_truth, title, savedir, show)
2 |
3 | %PRECISION_PLOT
4 | % Calculates precision for a series of distance thresholds (percentage of
5 | % frames where the distance to the ground truth is within the threshold).
6 | % The results are shown in a new figure if SHOW is true.
7 | %
8 | % Accepts positions and ground truth as Nx2 matrices (for N frames), and
9 | % a title string.
10 | %
11 | % Joao F. Henriques, 2014
12 | % http://www.isr.uc.pt/~henriques/
13 |
14 |
15 | max_threshold = 50; %used for graphs in the paper
16 |
17 |
18 | precisions = zeros(max_threshold, 1);
19 |
20 | if size(positions,1) ~= size(ground_truth,1)
21 | % fprintf('%12s - Number of ground truth frames does not match number of tracked frames.\n', title)
22 |
23 | %just ignore any extra frames, in either results or ground truth
24 | n = min(size(positions,1), size(ground_truth,1));
25 | positions(n+1:end,:) = [];
26 | ground_truth(n+1:end,:) = [];
27 | end
28 |
29 | % calculate distances to ground truth over all frames
30 | distances = sqrt((positions(:,1) - ground_truth(:,1)).^2 + ...
31 | (positions(:,2) - ground_truth(:,2)).^2);
32 | distances(isnan(distances)) = [];
33 |
34 | % compute precisions
35 | for p = 1:max_threshold
36 | precisions(p) = nnz(distances <= p) / numel(distances);
37 | end
38 |
39 | % plot the precisions
40 | if show == 1
41 | han = figure('Name',['Precisions - ' title]);
42 | set(han,'DefaultFigureVisible','on');
43 | plot(precisions, 'k-', 'LineWidth',2);
44 | xlabel('Threshold'), ylabel('Precision');
45 | saveas(han,[savedir, title,'.png']);
46 | else
47 | han = figure('Name',['Precisions - ' title]);
48 | set(han,'DefaultFigureVisible','off');
49 | plot(precisions, 'k-', 'LineWidth',2);
50 | xlabel('Threshold'), ylabel('Precision');
51 | saveas(han,[savedir, title,'.png']);
52 | end
53 |
54 | end
55 |
56 |
--------------------------------------------------------------------------------
/implementation/scale_filter/getScaleSubwindow_v1.m:
--------------------------------------------------------------------------------
1 | function out = getScaleSubwindow_v1(img, pos, target_size, search_size, ~, ~, hog_scale_cell_size)
2 | % function out = getScaleSubwindow_v1(img, pos, target_size, search_size, scale_window, scale_model_sz, hog_scale_cell_size)
3 | % KCC: Kernel Cross-Correlator
4 | % Visual Tracking Using KCC
5 | %
6 | % Copyright (C) 2017
7 | % Author: Wang Chen wang.chen@zoho.com Nanyang Technological University
8 | % Zhang Le zhang.le@adsc.com Advanced Digital Sciences Center
9 | %
10 | % This file is part of KCC.
11 | %
12 | % KCC is free software: you can redistribute it and/or modify
13 | % it under the terms of the GNU General Public License as published by
14 | % the Free Software Foundation, either version 3 of the License, or
15 | % (at your option) any later version.
16 | %
17 | % KCC is distributed in the hope that it will be useful,
18 | % but WITHOUT ANY WARRANTY; without even the implied warranty of
19 | % MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
20 | % GNU General Public License for more details.
21 | %
22 | % You should have received a copy of the GNU General Public License
23 | % along with KCC. If not, see .
24 | padding=0;
25 | num_scales = length(search_size);
26 | if size(img,3)>1
27 | img= single(rgb2gray(img))/255.0;
28 | end
29 | for s = 1:num_scales
30 | tmp_sz = floor((target_size * (1 + padding))*search_size(s));
31 | param0 = [pos(2), pos(1), tmp_sz(2)/target_size(2), 0,...
32 | tmp_sz(1)/target_size(2)/(target_size(1)/target_size(2)),0];
33 | param0 = affparam2mat(param0);
34 | patch = warpimg(double(img), param0, target_size);
35 | patch = fhog(single(patch), hog_scale_cell_size);
36 | patch = patch(:,:,1:31);
37 |
38 | if s == 1
39 | out = zeros(numel(patch), num_scales, 'single');
40 | end
41 |
42 | % window
43 | out(:,s) = patch(:);%* scale_window(s);
44 | end
45 |
46 |
--------------------------------------------------------------------------------
/feature_extraction/imResample.m:
--------------------------------------------------------------------------------
1 | function B = imResample( A, scale, method, norm )
2 | % Fast bilinear image downsampling/upsampling.
3 | %
4 | % Gives similar results to imresize with the bilinear option and
5 | % antialiasing turned off if scale is near 1, except sometimes the final
6 | % dims are off by 1 pixel. For very small values of the scale imresize is
7 | % faster but only looks at subset of values of original image.
8 | %
9 | % This code requires SSE2 to compile and run (most modern Intel and AMD
10 | % processors support SSE2). Please see: http://en.wikipedia.org/wiki/SSE2.
11 | %
12 | % USAGE
13 | % B = imResample( A, scale, [method], [norm] )
14 | %
15 | % INPUT
16 | % A - input image (2D or 3D single, double or uint8 array)
17 | % scale - scalar resize factor [s] of target height and width [h w]
18 | % method - ['bilinear'] either 'bilinear' or 'nearest'
19 | % norm - [1] optionally multiply every output pixel by norm
20 | %
21 | % OUPUT
22 | % B - resampled image
23 | %
24 | % EXAMPLE
25 | % I=single(imread('cameraman.tif')); n=100; s=1/2; method='bilinear';
26 | % tic, for i=1:n, I1=imresize(I,s,method,'Antialiasing',0); end; toc
27 | % tic, for i=1:n, I2=imResample(I,s,method); end; toc
28 | % figure(1); im(I1); figure(2); im(I2);
29 | %
30 | % See also imresize
31 | %
32 | % Piotr's Computer Vision Matlab Toolbox Version 3.24
33 | % Copyright 2014 Piotr Dollar. [pdollar-at-gmail.com]
34 | % Licensed under the Simplified BSD License [see external/bsd.txt]
35 |
36 | % figure out method and get target dimensions
37 | if( nargin<3 || isempty(method) ), bilinear=1; else
38 | if(~all(ischar(method))), error('method must be a string'); end
39 | bilinear = ~strcmpi(method,'nearest');
40 | end
41 | if( nargin<4 || isempty(norm) ), norm=1; end
42 | [m,n,~]=size(A); k=numel(scale);
43 | same = (k==1 && scale==1) | (k==2 && m==scale(1) && n==scale(2));
44 | if( same && norm==1 ); B=A; return; end
45 |
46 | if( bilinear )
47 | % use bilinear interpolation
48 | if(k==1), m1=round(scale*m); n1=round(scale*n);
49 | else
50 | m1=scale(1);
51 | n1=scale(2);
52 | end
53 | B=imResampleMex(A,m1,n1,norm);
54 | else
55 | % use nearest neighbor interpolation
56 | if(k==1), sy=scale; sx=sy; m1=ceil(m*sy); n1=ceil(n*sx);
57 | else
58 | m1=scale(1);
59 | n1=scale(2);
60 | sy=m1/m; sx=n1/n;
61 | end
62 | y=(1:m1)'; y=floor(y/sy-.5/sy+1); y=min(max(1,y),m);
63 | x=(1:n1)'; x=floor(x/sx-.5/sx+1); x=min(max(1,x),n);
64 | nd=ndims(A);
65 | if(nd==2)
66 | B=A(y,x);
67 | elseif(nd==3)
68 | B=A(y,x,:);
69 | else
70 | ids={y,x};
71 | ids(3:nd)={':'};
72 | B=A(ids{:});
73 | end
74 | if(norm~=1), B=B*norm; end
75 | end
76 |
--------------------------------------------------------------------------------
/readme.md:
--------------------------------------------------------------------------------
1 | # TACF-Tracker
2 |
3 | | **Test passed** |
4 | | ------------------------------------------------------------ |
5 | | [](https://www.mathworks.com/products/matlab.html) |
6 |
7 | Matlab implementation of our Towards Robust Visual Tracking for Unmanned Aerial Vehicle with Tri-Attentional Correlation Filters (TACF) tracker.
8 |
9 |
10 | # Paper and Citation
11 |
12 | This paper has been accepted by IROS2020.
13 |
14 | You can find this paper here: https://arxiv.org/abs/2008.00528.
15 |
16 | Please cite this paper as:
17 |
18 | @article{2008.00528,
19 |
20 | author = {Yujie He and Changhong Fu and Fuling Lin and Yiming Li and Peng Lu},
21 |
22 | title = {Towards Robust Visual Tracking for Unmanned Aerial Vehicle with Tri-Attentional Correlation Filters},
23 |
24 | year = {2020},
25 |
26 | journal = {arXiv:2008.00528}
27 |
28 | }
29 |
30 | ### Abstract
31 |
32 | >Object tracking has been broadly applied in unmanned aerial vehicle (UAV) tasks in recent years. How-ever, existing algorithms still face difficulties such as partial occlusion, clutter background, and other challenging visual factors. Inspired by the cutting-edge attention mechanisms, a new visual tracking framework leveraging multi-level visual attention to make full use of the information during tracking. Three primary attention, i.e., contextual attention, dimensional attention, and spatiotemporal attention, are integrated into the training and detection stages of correlation filter-based tracking pipeline. Therefore, the proposed tracker is equipped with robust discriminative power against challenging factors while maintains high operational efficiency in UAV scenarios. Quantitative and qualitative experiments on two well-known benchmark with 173 challenging UAV video sequences demonstrate the effectiveness of the proposed framework. The proposed tracking algorithm compares favorably against state-of-the-art methods, yielding 4.8% relative gain in UAVDT and 8.2% relative gain in UAV123@10fps against the baseline tracker while operating at the speed of ∼28 frames per second
33 |
34 |
35 | ### Running instructions
36 |
37 | 1. Config dataset path in `UAV123_utils/load_video_information.m`,
38 |
39 | 2. Run `TACF_Demo.m`
40 |
41 | ### Results on UAV datasets
42 |
43 |
44 | UAVDT
45 |
46 |
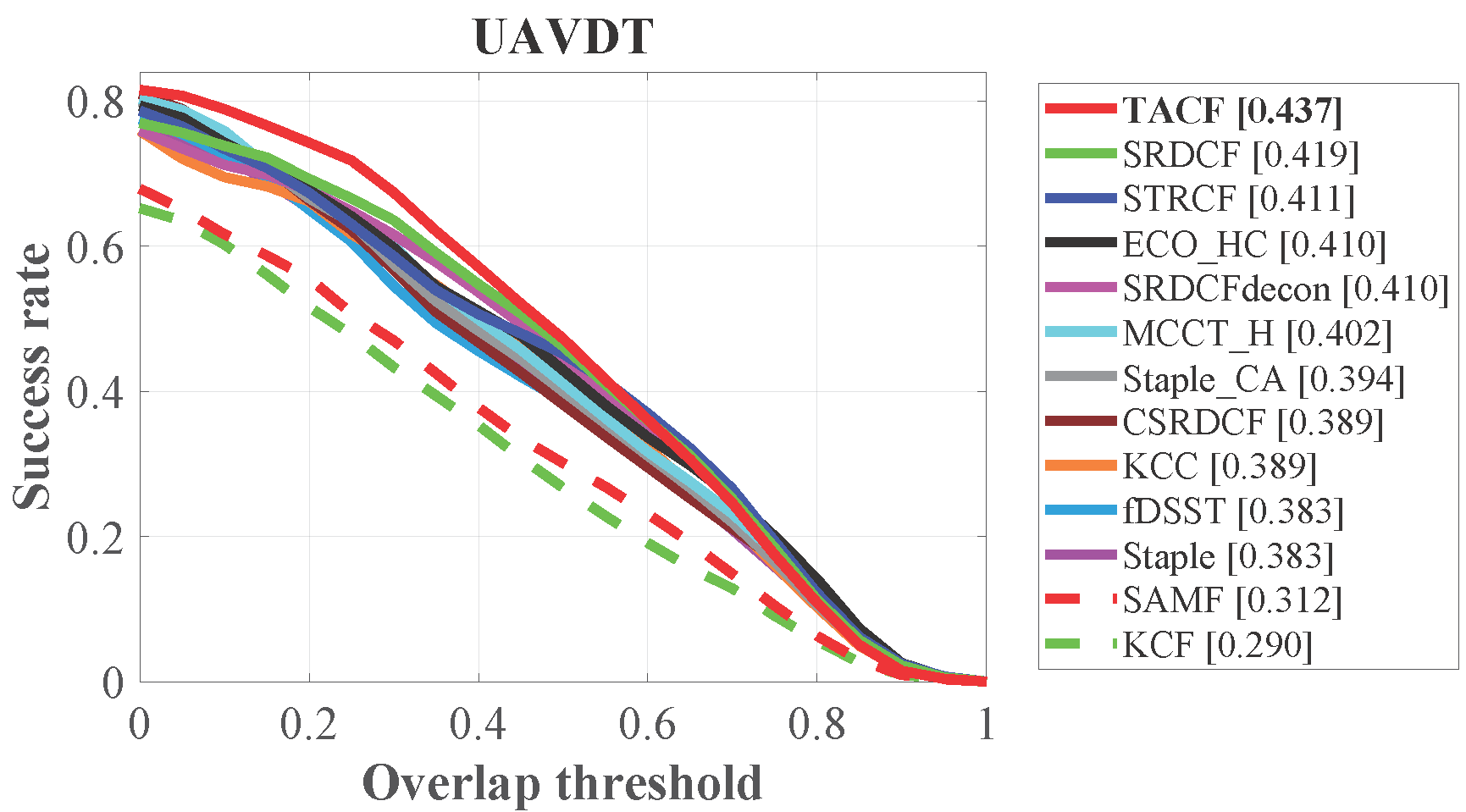
47 |
49 |
50 |
51 |
52 | UAV123@10fps
53 |
54 |
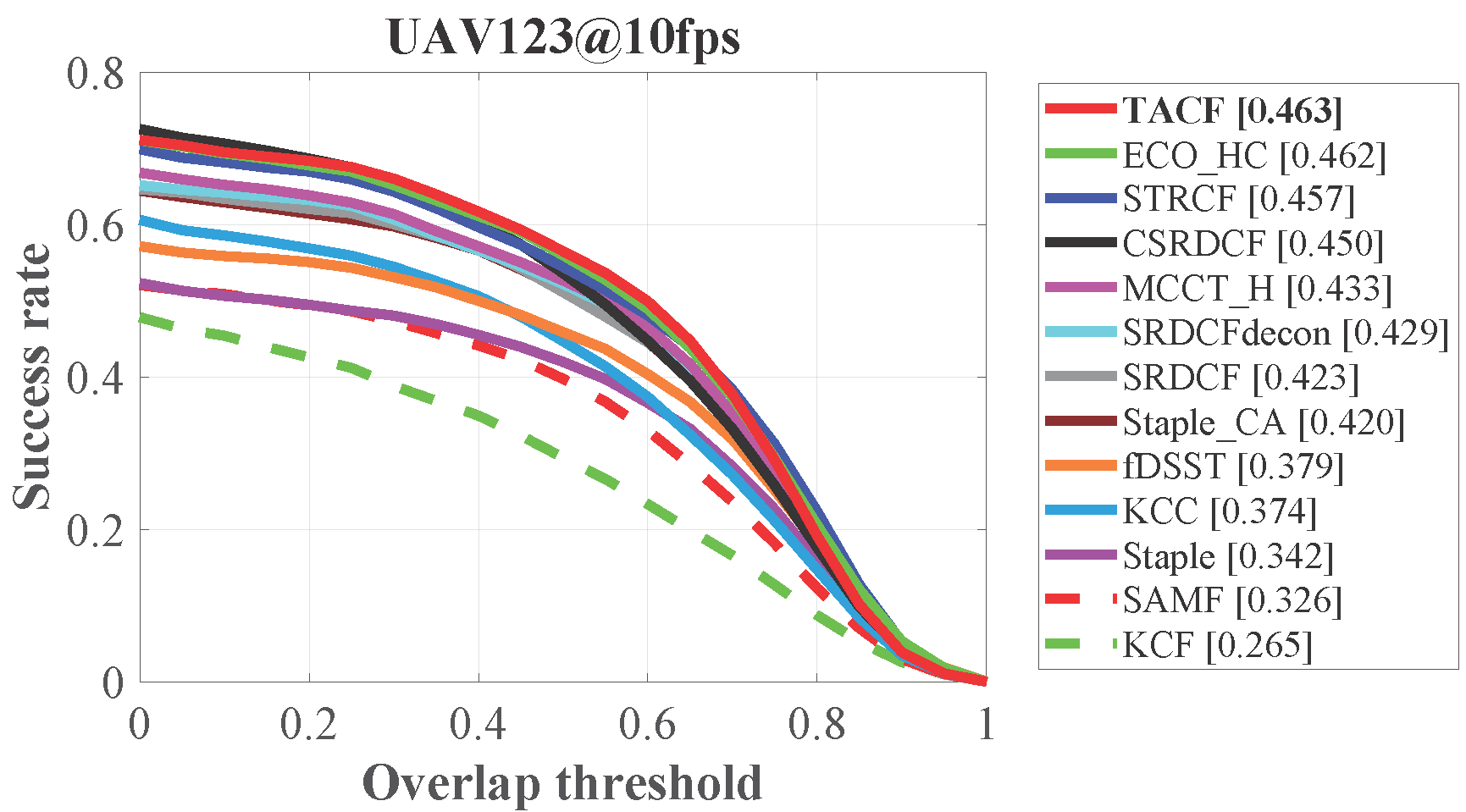
55 |
57 |
58 | ### Contact
59 |
60 | Yujie He
61 |
62 | Email: he-yujie@outlook.com
63 |
64 | Changhong Fu
65 |
66 | Email: changhong.fu@tongji.edu.cn
67 |
68 | ### Acknowledgements
69 |
70 | We thank the contribution of Dr.`Chen Wang` and Dr. `Martin Danelljan` for their previous work KCC, DSST and ECO. The feature extraction modules are borrowed from the [ECO](https://github.com/martin-danelljan/ECO) and some of the parameter settings and functions are borrowed from [KCC](https://github.com/wang-chen/KCC/tree/master/tracking).
71 |
--------------------------------------------------------------------------------
/external_libs/mtimesx/mtimesx_sparse.m:
--------------------------------------------------------------------------------
1 | % mtimesx_sparse does sparse matrix multiply of two inputs
2 | %******************************************************************************
3 | %
4 | % MATLAB (R) is a trademark of The Mathworks (R) Corporation
5 | %
6 | % Function: mtimesx_sparse
7 | % Filename: mtimesx_sparse.m
8 | % Programmer: James Tursa
9 | % Version: 1.00
10 | % Date: September 27, 2009
11 | % Copyright: (c) 2009 by James Tursa, All Rights Reserved
12 | %
13 | % This code uses the BSD License:
14 | %
15 | % Redistribution and use in source and binary forms, with or without
16 | % modification, are permitted provided that the following conditions are
17 | % met:
18 | %
19 | % * Redistributions of source code must retain the above copyright
20 | % notice, this list of conditions and the following disclaimer.
21 | % * Redistributions in binary form must reproduce the above copyright
22 | % notice, this list of conditions and the following disclaimer in
23 | % the documentation and/or other materials provided with the distribution
24 | %
25 | % THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
26 | % AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
27 | % IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
28 | % ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
29 | % LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
30 | % CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
31 | % SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
32 | % INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
33 | % CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
34 | % ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
35 | % POSSIBILITY OF SUCH DAMAGE.
36 | %
37 | %--
38 | %
39 | % mtimesx_sparse is a helper function for mtimesx and is not intended to be called
40 | % directly by the user.
41 | %
42 | % ---------------------------------------------------------------------------------------------------------------------------------
43 |
44 | function result = mtimesx_sparse(a,transa,b,transb)
45 | if( transa == 'N' )
46 | if( transb == 'N' )
47 | result = a * b;
48 | elseif( transb == 'G' )
49 | result = a * conj(b);
50 | elseif( transb == 'T' )
51 | result = a * b.';
52 | else
53 | result = a * b';
54 | end
55 | elseif( transa == 'G' )
56 | if( transb == 'N' )
57 | result = conj(a) * b;
58 | elseif( transb == 'G' )
59 | result = conj(a) * conj(b);
60 | elseif( transb == 'T' )
61 | result = conj(a) * b.';
62 | else
63 | result = conj(a) * b';
64 | end
65 | elseif( transa == 'T' )
66 | if( transb == 'N' )
67 | result = a.' * b;
68 | elseif( transb == 'G' )
69 | result = a.' * conj(b);
70 | elseif( transb == 'T' )
71 | result = a.' * b.';
72 | else
73 | result = a.' * b';
74 | end
75 | else
76 | if( transb == 'N' )
77 | result = a' * b;
78 | elseif( transb == 'G' )
79 | result = a' * conj(b);
80 | elseif( transb == 'T' )
81 | result = a' * b.';
82 | else
83 | result = a' * b';
84 | end
85 | end
86 | end
87 |
--------------------------------------------------------------------------------
/feature_extraction/fhog.m:
--------------------------------------------------------------------------------
1 | function H = fhog( I, binSize, nOrients, clip, crop )
2 | % Efficiently compute Felzenszwalb's HOG (FHOG) features.
3 | %
4 | % A fast implementation of the HOG variant used by Felzenszwalb et al.
5 | % in their work on discriminatively trained deformable part models.
6 | % http://www.cs.berkeley.edu/~rbg/latent/index.html
7 | % Gives nearly identical results to features.cc in code release version 5
8 | % but runs 4x faster (over 125 fps on VGA color images).
9 | %
10 | % The computed HOG features are 3*nOrients+5 dimensional. There are
11 | % 2*nOrients contrast sensitive orientation channels, nOrients contrast
12 | % insensitive orientation channels, 4 texture channels and 1 all zeros
13 | % channel (used as a 'truncation' feature). Using the standard value of
14 | % nOrients=9 gives a 32 dimensional feature vector at each cell. This
15 | % variant of HOG, refered to as FHOG, has been shown to achieve superior
16 | % performance to the original HOG features. For details please refer to
17 | % work by Felzenszwalb et al. (see link above).
18 | %
19 | % This function is essentially a wrapper for calls to gradientMag()
20 | % and gradientHist(). Specifically, it is equivalent to the following:
21 | % [M,O] = gradientMag( I,0,0,0,1 ); softBin = -1; useHog = 2;
22 | % H = gradientHist(M,O,binSize,nOrients,softBin,useHog,clip);
23 | % See gradientHist() for more general usage.
24 | %
25 | % This code requires SSE2 to compile and run (most modern Intel and AMD
26 | % processors support SSE2). Please see: http://en.wikipedia.org/wiki/SSE2.
27 | %
28 | % USAGE
29 | % H = fhog( I, [binSize], [nOrients], [clip], [crop] )
30 | %
31 | % INPUTS
32 | % I - [hxw] color or grayscale input image (must have type single)
33 | % binSize - [8] spatial bin size
34 | % nOrients - [9] number of orientation bins
35 | % clip - [.2] value at which to clip histogram bins
36 | % crop - [0] if true crop boundaries
37 | %
38 | % OUTPUTS
39 | % H - [h/binSize w/binSize nOrients*3+5] computed hog features
40 | %
41 | % EXAMPLE
42 | % I=imResample(single(imread('peppers.png'))/255,[480 640]);
43 | % tic, for i=1:100, H=fhog(I,8,9); end; disp(100/toc) % >125 fps
44 | % figure(1); im(I); V=hogDraw(H,25,1); figure(2); im(V)
45 | %
46 | % EXAMPLE
47 | % % comparison to features.cc (requires DPM code release version 5)
48 | % I=imResample(single(imread('peppers.png'))/255,[480 640]); Id=double(I);
49 | % tic, for i=1:100, H1=features(Id,8); end; disp(100/toc)
50 | % tic, for i=1:100, H2=fhog(I,8,9,.2,1); end; disp(100/toc)
51 | % figure(1); montage2(H1); figure(2); montage2(H2);
52 | % D=abs(H1-H2); mean(D(:))
53 | %
54 | % See also hog, hogDraw, gradientHist
55 | %
56 | % Piotr's Image&Video Toolbox Version 3.23
57 | % Copyright 2013 Piotr Dollar. [pdollar-at-caltech.edu]
58 | % Please email me if you find bugs, or have suggestions or questions!
59 | % Licensed under the Simplified BSD License [see external/bsd.txt]
60 |
61 | %Note: modified to be more self-contained
62 |
63 | if( nargin<2 ), binSize=8; end
64 | if( nargin<3 ), nOrients=9; end
65 | if( nargin<4 ), clip=.2; end
66 | if( nargin<5 ), crop=0; end
67 |
68 | softBin = -1; useHog = 2; b = binSize;
69 |
70 | [M,O]=gradientMex('gradientMag',I,0,1);
71 |
72 | H = gradientMex('gradientHist',M,O,binSize,nOrients,softBin,useHog,clip);
73 |
74 | if( crop ), e=mod(size(I),b) use 1D instead of 3D histograms
46 | if(size(im,3)==1)
47 | params.grayscale_sequence = true;
48 | end
49 |
50 | region = seq.init_rect;
51 |
52 | if(numel(region)==8)
53 | % polygon format (VOT14, VOT15)
54 | [cx, cy, w, h] = getAxisAlignedBB(region);
55 | else % rectangle format (WuCVPR13)
56 | x = region(1);
57 | y = region(2);
58 | w = region(3);
59 | h = region(4);
60 | cx = x+w/2;
61 | cy = y+h/2;
62 | end
63 |
64 | % init_pos is the centre of the initial bounding box
65 | params.init_pos = [cy cx];
66 | params.target_sz = round([h w]);
67 | % defines inner area used to sample colors from the foreground
68 | params.inner_padding = 0.2;
69 |
70 | [params, bg_area, fg_area, area_resize_factor] = initializeAllAreas(im, params);
71 |
72 | % HOG feature parameters
73 | hog_params.nDim = 31;
74 | % CN feature parameters
75 | cn_params.nDim = 11;
76 | % Gray feature parameters
77 | gray_params.nDim = 1;
78 | % Saliency feature parameters
79 | saliency_params.nDim = 3;
80 | % Deep feature parameters
81 | params.indLayers = [37, 28, 19];% The CNN layers Conv3-4 in VGG Net
82 | deep_params.nDim = [512, 512, 256];
83 | deep_params.layers = params.indLayers;
84 | % handcrafted parameters
85 | Feat1 = 'fhog'; % fhog, cn, gray, saliency, handcrafted_assem fhog_cn
86 | switch Feat1
87 | case 'conv3'
88 | params.layerInd{1} = 3;
89 | params.feat1dim = deep_params.nDim(1);
90 | case 'conv4'
91 | params.layerInd{1} = 2;
92 | params.feat1dim = deep_params.nDim(2);
93 | case 'conv5'
94 | params.layerInd{1} = 1;
95 | params.feat1dim = deep_params.nDim(3);
96 | case 'fhog'
97 | params.layerInd{1} = 0;
98 | params.feat1dim = hog_params.nDim;
99 | case 'cn'
100 | params.layerInd{1} = 0;
101 | params.feat1dim = cn_params.nDim;
102 | case 'handcrafted_assem'
103 | params.layerInd{1} = 0;
104 | params.feat1dim = hog_params.nDim + cn_params.nDim;
105 | end
106 |
107 | if params.two_feature
108 | Feat2 = 'cn'; % fhog, cn, gray, saliency, handcrafted_assem
109 | switch Feat2
110 | case 'conv3'
111 | params.layerInd{2} = 3;
112 | params.feat2dim = deep_params.nDim(1);
113 | case 'conv4'
114 | params.layerInd{2} = 2;
115 | params.feat2dim = deep_params.nDim(2);
116 | case 'conv5'
117 | params.layerInd{2} = 1;
118 | params.feat2dim = deep_params.nDim(3);
119 | case 'fhog'
120 | params.layerInd{2} = 0;
121 | params.feat2dim = hog_params.nDim;
122 | case 'cn'
123 | params.layerInd{2} = 0;
124 | params.feat2dim = cn_params.nDim;
125 | case 'handcrafted_assem'
126 | params.layerInd{2} = 0;
127 | params.feat2dim = hog_params.nDim + cn_params.nDim;
128 | end
129 | params.feat_type = {Feat1, Feat2};
130 | else
131 | params.feat_type = {Feat1};
132 | end
133 |
134 | params.t_global.type_assem = 'fhog_cn'; % fhog_cn, fhog_gray,fhog_cn_gray_saliency, fhog_gray_saliency,fhog_cn_gray,fhog_gray
135 | switch params.t_global.type_assem
136 | case 'fhog_cn_gray_saliency'
137 | handcrafted_params.nDim = hog_params.nDim + cn_params.nDim + gray_params.nDim + saliency_params.nDim;
138 | case 'fhog_cn_gray'
139 | handcrafted_params.nDim = hog_params.nDim + cn_params.nDim + gray_params.nDim;
140 | case 'fhog_gray_saliency'
141 | handcrafted_params.nDim = hog_params.nDim + gray_params.nDim + saliency_params.nDim;
142 | case 'fhog_gray'
143 | handcrafted_params.nDim = hog_params.nDim + gray_params.nDim;
144 | case 'fhog_cn'
145 | handcrafted_params.nDim = hog_params.nDim + cn_params.nDim;
146 | end
147 |
148 | params.t_features = {struct('getFeature_fhog',@get_fhog,...
149 | 'getFeature_cn',@get_cn,...
150 | 'getFeature_gray',@get_gray,...
151 | 'getFeature_saliency',@get_saliency,...
152 | 'getFeature_deep',@get_deep,...
153 | 'getFeature_handcrafted',@get_handcrafted,...
154 | 'hog_params',hog_params,...
155 | 'cn_params',cn_params,...
156 | 'gray_params',gray_params,...
157 | 'saliency_params',saliency_params,...
158 | 'deep_params',deep_params,...
159 | 'handcrafted_params',handcrafted_params)};
160 |
161 | params.t_global.w2c_mat = load('w2c.mat');
162 | params.t_global.factor = 0.2; % for saliency
163 | params.t_global.cell_size = 4;
164 | params.t_global.cell_selection_thresh = 0.75^2;
165 |
166 | params.lambda1 = 1e-4; %
167 | params.lambda2 = 1/(16^2); %
168 |
169 | kernel_type{1} = 'gaussian';
170 | kernel_type{2} = 'polynomial';
171 | params.kernel_type = kernel_type;
172 | params.output_sigma_factor = {1/40, 1/16};
173 | params.tran_sigma = {0.5, 0.5};
174 | params.polya = {1,1};
175 | params.polyb = {7,2};
176 |
177 | params.learning_rate_cf = 0.01;
178 |
179 | params.num_scales = 33;
180 | params.scale_step = 1.03;
181 | params.scale_model_max_area = 32*16;
182 | params.learning_rate_scale = 0.004;
183 |
184 | % start the tracking
185 | results = tracker(params, im, bg_area, fg_area, area_resize_factor);
186 |
187 | end
--------------------------------------------------------------------------------
/external_libs/imResampleMex.cpp:
--------------------------------------------------------------------------------
1 | /*******************************************************************************
2 | * Piotr's Computer Vision Matlab Toolbox Version 3.00
3 | * Copyright 2014 Piotr Dollar. [pdollar-at-gmail.com]
4 | * Licensed under the Simplified BSD License [see external/bsd.txt]
5 | *******************************************************************************/
6 | #include "wrappers.hpp"
7 | #include "string.h"
8 | #include
9 | #include
10 | #include "sse.hpp"
11 | typedef unsigned char uchar;
12 |
13 | // compute interpolation values for single column for resapling
14 | template void resampleCoef( int ha, int hb, int &n, int *&yas,
15 | int *&ybs, T *&wts, int bd[2], int pad=0 )
16 | {
17 | const T s = T(hb)/T(ha), sInv = 1/s; T wt, wt0=T(1e-3)*s;
18 | bool ds=ha>hb; int nMax; bd[0]=bd[1]=0;
19 | if(ds) { n=0; nMax=ha+(pad>2 ? pad : 2)*hb; } else { n=nMax=hb; }
20 | // initialize memory
21 | wts = (T*)alMalloc(nMax*sizeof(T),16);
22 | yas = (int*)alMalloc(nMax*sizeof(int),16);
23 | ybs = (int*)alMalloc(nMax*sizeof(int),16);
24 | if( ds ) for( int yb=0; ybwt0 && ya>=0) { ybs[n]=yb; yas[n]=ya; wts[n]=wt; n++; n1++; W+=wt; }
31 | }
32 | if(W>1) for( int i=0; ibd[0]) bd[0]=n1;
34 | while( n1=0 && ya=ha-1) { ya=ha-1; bd[1]++; }
40 | ybs[yb]=yb; yas[yb]=ya; wts[yb]=wt;
41 | }
42 | }
43 |
44 | // resample A using bilinear interpolation and and store result in B
45 | template
46 | void resample( T *A, T *B, int ha, int hb, int wa, int wb, int d, T r ) {
47 | int hn, wn, x, x1, y, z, xa, xb, ya; T *A0, *A1, *A2, *A3, *B0, wt, wt1;
48 | T *C = (T*) alMalloc((ha+4)*sizeof(T),16); for(y=ha; y( wa, wb, wn, xas, xbs, xwts, xbd, 0 );
53 | resampleCoef( ha, hb, hn, yas, ybs, ywts, ybd, 4 );
54 | if( wa==2*wb ) r/=2; if( wa==3*wb ) r/=3; if( wa==4*wb ) r/=4;
55 | r/=T(1+1e-6); for( y=0; y C)
66 | #define FORs(X) if(sse) for(; ywb ) {
78 | int m=1; while( x1+m=4) { FORs(ADD(U(0),U(1),U(2),U(3))); FORr(V(0)+V(1)+V(2)+V(3)); }
86 | #undef U
87 | #undef V
88 | for( int x0=4; x0=wb-xbd[1]; x1++;
95 | if(xBd) memcpy(C,A0,ha*sizeof(T));
96 | if(!xBd) FORs(ADD(MUL(LDu(Af0[y]),SET(wtf)),MUL(LDu(Af1[y]),SET(wt1f))));
97 | if(!xBd) FORr( A0[y]*wt + A1[y]*wt1 );
98 | }
99 | #undef FORs
100 | #undef FORr
101 | // resample along y direction (B -> C)
102 | if( ha==hb*2 ) {
103 | T r2 = r/2; int k=((~((size_t) B0) + 1) & 15)/4; y=0;
104 | for( ; yhb ) {
113 | y=0;
114 | //if( sse && ybd[0]<=4 ) for(; y4) for(; y1 ) mexErrMsgTxt("One output expected.");
141 | nDims=mxGetNumberOfDimensions(prhs[0]); id=mxGetClassID(prhs[0]);
142 | ns = (int*) mxGetDimensions(prhs[0]); nCh=(nDims==2) ? 1 : ns[2];
143 | if( (nDims!=2 && nDims!=3) ||
144 | (id!=mxSINGLE_CLASS && id!=mxDOUBLE_CLASS && id!=mxUINT8_CLASS) )
145 | mexErrMsgTxt("A should be 2D or 3D single, double or uint8 array.");
146 | ms[0]=(int)mxGetScalar(prhs[1]); ms[1]=(int)mxGetScalar(prhs[2]); ms[2]=nCh;
147 | if( ms[0]<=0 || ms[1]<=0 ) mexErrMsgTxt("downsampling factor too small.");
148 | nrm=(double)mxGetScalar(prhs[3]);
149 |
150 | // create output array
151 | plhs[0] = mxCreateNumericArray(3, (const mwSize*) ms, id, mxREAL);
152 | n=ns[0]*ns[1]*nCh; m=ms[0]*ms[1]*nCh;
153 |
154 | // perform resampling (w appropriate type)
155 | A=mxGetData(prhs[0]); B=mxGetData(plhs[0]);
156 | if( id==mxDOUBLE_CLASS ) {
157 | resample((double*)A, (double*)B, ns[0], ms[0], ns[1], ms[1], nCh, nrm);
158 | } else if( id==mxSINGLE_CLASS ) {
159 | resample((float*)A, (float*)B, ns[0], ms[0], ns[1], ms[1], nCh, float(nrm));
160 | } else if( id==mxUINT8_CLASS ) {
161 | float *A1 = (float*) mxMalloc(n*sizeof(float));
162 | float *B1 = (float*) mxCalloc(m,sizeof(float));
163 | for(int i=0; i 1.40, Added OpenMP support for custom code
50 | % Expanded sparse * single and sparse * nD support
51 | %
52 | %--------------------------------------------------------------------------
53 |
54 | function Cr = mtimesx_test_nd(n)
55 | mtimesx; % load the mex routine into memory
56 | if( nargin == 0 )
57 | n = 4;
58 | else
59 | n = floor(n);
60 | if( ~(n >= 4 && n <= 100) )
61 | n = 4;
62 | end
63 | end
64 | cn = sprintf('%g',n);
65 |
66 | disp(' ');
67 | disp('MTIMESX multi-dimensional equality and speed tests');
68 | disp('--------------------------------------------------');
69 | disp(' ');
70 | disp('(M x K) * ( K x N) equality tests, SPEED mode, M,K,N <= 4');
71 | trans = 'NGTC';
72 | cmpx = {'real ','cmpx '};
73 | mtimesx('speed');
74 | smallok = true;
75 | for m=1:4
76 | for k=1:4
77 | for n=1:4
78 | for transa=1:4
79 | if( transa <= 2 )
80 | ma = m;
81 | ka = k;
82 | else
83 | ma = k;
84 | ka = m;
85 | end
86 | for transb=1:4
87 | if( transb <= 2 )
88 | kb = k;
89 | nb = n;
90 | else
91 | kb = n;
92 | nb = k;
93 | end
94 | for cmplxa=1:2
95 | if( cmplxa == 1 )
96 | A = floor(rand(ma,ka)*100+1);
97 | else
98 | A = floor(rand(ma,ka)*100+1) + floor(rand(ma,ka)*100+1)*1i;
99 | end
100 | for cmplxb=1:2
101 | if( cmplxb == 1 )
102 | B = floor(rand(kb,nb)*100+1);
103 | else
104 | B = floor(rand(kb,nb)*100+1) + floor(rand(kb,nb)*100+1)*1i;
105 | end
106 | Cm = mtimesx_sparse(A,trans(transa),B,trans(transb));
107 | Cx = mtimesx(A,trans(transa),B,trans(transb));
108 | if( isequal(Cm,Cx) )
109 | disp(['(' cmpx{cmplxa} num2str(m) ' x ' num2str(k) ')' trans(transa) ...
110 | ' * (' cmpx{cmplxb} num2str(k) ' x ' num2str(n) ')' trans(transb) ' EQUAL']);
111 | else
112 | disp(['(' cmpx{cmplxa} num2str(m) ' x ' num2str(k) ')' trans(transa) ...
113 | ' * (' cmpx{cmplxb} num2str(k) ' x ' num2str(n) ')' trans(transb) ' NOT EQUAL']);
114 | smallok = false;
115 | end
116 | end
117 | end
118 | end
119 | end
120 | end
121 | end
122 | end
123 |
124 | if( mtimesx('openmp') )
125 | disp(' ');
126 | disp('(M x K) * ( K x N) equality tests, SPEEDOMP mode, M,K,N <= 4');
127 | mtimesx('speedomp');
128 | smallokomp = true;
129 | for m=1:4
130 | for k=1:4
131 | for n=1:4
132 | for transa=1:4
133 | if( transa <= 2 )
134 | ma = m;
135 | ka = k;
136 | else
137 | ma = k;
138 | ka = m;
139 | end
140 | for transb=1:4
141 | if( transb <= 2 )
142 | kb = k;
143 | nb = n;
144 | else
145 | kb = n;
146 | nb = k;
147 | end
148 | for cmplxa=1:2
149 | if( cmplxa == 1 )
150 | A = floor(rand(ma,ka)*100+1);
151 | else
152 | A = floor(rand(ma,ka)*100+1) + floor(rand(ma,ka)*100+1)*1i;
153 | end
154 | A = reshape(repmat(A,1000,1),ma,ka,1000);
155 | for cmplxb=1:2
156 | if( cmplxb == 1 )
157 | B = floor(rand(kb,nb)*100+1);
158 | else
159 | B = floor(rand(kb,nb)*100+1) + floor(rand(kb,nb)*100+1)*1i;
160 | end
161 | B = reshape(repmat(B,1000,1),kb,nb,1000);
162 | Cm = mtimesx_sparse(A(:,:,1),trans(transa),B(:,:,1),trans(transb));
163 | Cx = mtimesx(A,trans(transa),B,trans(transb));
164 | if( isequal(Cm,Cx(:,:,1)) )
165 | disp(['(' cmpx{cmplxa} num2str(m) ' x ' num2str(k) ')' trans(transa) ...
166 | ' * (' cmpx{cmplxb} num2str(k) ' x ' num2str(n) ')' trans(transb) ' EQUAL']);
167 | else
168 | disp(['(' cmpx{cmplxa} num2str(m) ' x ' num2str(k) ')' trans(transa) ...
169 | ' * (' cmpx{cmplxb} num2str(k) ' x ' num2str(n) ')' trans(transb) ' NOT EQUAL']);
170 | smallokomp = false;
171 | end
172 | end
173 | end
174 | end
175 | end
176 | end
177 | end
178 | end
179 | end
180 |
181 | disp(' ');
182 | if( smallok )
183 | disp('All small matrix multiplies are OK in SPEED mode');
184 | else
185 | disp('ERROR --> One or more of the small matrix multiplies was not equal in SPEED mode');
186 | end
187 | if( mtimesx('openmp') )
188 | if( smallokomp )
189 | disp('All small matrix multiplies are OK in SPEEDOMP mode');
190 | else
191 | disp('ERROR --> One or more of the small matrix multiplies was not equal in SPEEDOMP mode');
192 | end
193 | end
194 |
195 | disp(' ');
196 | disp(['mtimesx multi-dimensional test routine using ' cn ' repetitions']);
197 |
198 | if( mtimesx('OPENMP') )
199 | topm = 6;
200 | else
201 | topm = 4;
202 | end
203 | Cr = cell(6,topm+1);
204 | Cr{1,1} = 'All operands real';
205 |
206 | for m=2:topm+1
207 | if( m == 2 )
208 | mtimesx('BLAS');
209 | elseif( m == 3 )
210 | mtimesx('LOOPS');
211 | elseif( m == 4 )
212 | mtimesx('MATLAB');
213 | elseif( m == 5 )
214 | mtimesx('SPEED');
215 | elseif( m == 6 )
216 | mtimesx('LOOPSOMP');
217 | else
218 | mtimesx('SPEEDOMP');
219 | end
220 | Cr{1,m} = mtimesx;
221 |
222 | disp(' ');
223 | disp('--------------------------------------------------------------');
224 | disp('--------------------------------------------------------------');
225 | disp(' ');
226 | disp(['MTIMESX mode: ' mtimesx]);
227 | disp(' ');
228 | disp('(real 3x5x1x4x3x2x1x8) * (real 5x7x3x1x3x2x5) example');
229 | Cr{2,1} = '(3x5xND) *(5x7xND)';
230 | A = rand(3,5,1,4,3,2,1,8);
231 | B = rand(5,7,3,1,3,2,5);
232 | % mtimes
233 | tm = zeros(1,n);
234 | for k=1:n
235 | clear Cm
236 | A(1) = 2*A(1);
237 | B(1) = 2*B(1);
238 | tic
239 | Cm = zeros(3,7,3,4,3,2,5,8);
240 | for k1=1:3
241 | for k2=1:4
242 | for k3=1:3
243 | for k4=1:2
244 | for k5=1:5
245 | for k6=1:8
246 | Cm(:,:,k1,k2,k3,k4,k5,k6) = A(:,:,1,k2,k3,k4,1,k6) * B(:,:,k1,1,k3,k4,k5);
247 | end
248 | end
249 | end
250 | end
251 | end
252 | end
253 | tm(k) = toc;
254 | end
255 | % mtimesx
256 | tx = zeros(1,n);
257 | for k=1:n
258 | clear Cx
259 | tic
260 | Cx = mtimesx(A,B);
261 | tx(k) = toc;
262 | end
263 | % results
264 | tm = median(tm);
265 | tx = median(tx);
266 | if( tx < tm )
267 | faster = sprintf('%7.1f',100*(tm)/tx-100);
268 | slower = '';
269 | else
270 | faster = sprintf('%7.1f',-(100*(tx)/tm-100));
271 | slower = ' (i.e., slower)';
272 | end
273 | Cr{2,m} = faster;
274 | disp(' ');
275 | disp(['mtimes Elapsed time ' num2str(tm) ' seconds.']);
276 | disp(['MTIMESX Elapsed time ' num2str(tx) ' seconds.']);
277 | disp(['MTIMESX ' mtimesx ' mode is ' faster '% faster than MATLAB mtimes' slower])
278 | if( isequal(Cx,Cm) )
279 | disp(['MTIMESX ' mtimesx ' mode result matches mtimes: EQUAL'])
280 | else
281 | dx = max(abs(Cx(:)-Cm(:)));
282 | disp(['MTIMESX ' mtimesx ' mode result does not match mtimes: NOT EQUAL , max diff = ' num2str(dx)])
283 | end
284 |
285 | disp(' ');
286 | disp('--------------------------------------------------------------');
287 | disp('(real 3x3x1000000) * (real 3x3x1000000) example');
288 | Cr{3,1} = '(3x3xN) *(3x3xN)';
289 | A = rand(3,3,1000000);
290 | B = rand(3,3,1000000);
291 | % mtimes
292 | tm = zeros(1,n);
293 | for k=1:n
294 | clear Cm
295 | A(1) = 2*A(1);
296 | B(1) = 2*B(1);
297 | tic
298 | Cm = zeros(3,3,1000000);
299 | for k1=1:1000000
300 | Cm(:,:,k1) = A(:,:,k1) * B(:,:,k1);
301 | end
302 | tm(k) = toc;
303 | end
304 | % mtimesx
305 | tx = zeros(1,n);
306 | for k=1:n
307 | clear Cx
308 | tic
309 | Cx = mtimesx(A,B);
310 | tx(k) = toc;
311 | end
312 | % results
313 | tm = median(tm);
314 | tx = median(tx);
315 | if( tx < tm )
316 | faster = sprintf('%7.1f',100*(tm)/tx-100);
317 | slower = '';
318 | else
319 | faster = sprintf('%7.1f',-(100*(tx)/tm-100));
320 | slower = ' (i.e., slower)';
321 | end
322 | Cr{3,m} = faster;
323 | disp(' ');
324 | disp(['mtimes Elapsed time ' num2str(tm) ' seconds.']);
325 | disp(['MTIMESX Elapsed time ' num2str(tx) ' seconds.']);
326 | disp(['MTIMESX ' mtimesx ' mode is ' faster '% faster than MATLAB mtimes' slower])
327 | if( isequal(Cx,Cm) )
328 | disp(['MTIMESX ' mtimesx ' mode result matches mtimes: EQUAL'])
329 | else
330 | dx = max(abs(Cx(:)-Cm(:)));
331 | disp(['MTIMESX ' mtimesx ' mode result does not match mtimes: NOT EQUAL , max diff = ' num2str(dx)])
332 | end
333 |
334 | disp(' ');
335 | disp('--------------------------------------------------------------');
336 | disp('(real 2x2x2000000) * (real 2x2x2000000) example');
337 | Cr{4,1} = '(2x2xN) *(2x2xN)';
338 | A = rand(2,2,2000000);
339 | B = rand(2,2,2000000);
340 | % mtimes
341 | tm = zeros(1,n);
342 | for k=1:n
343 | clear Cm
344 | A(1) = 2*A(1);
345 | B(1) = 2*B(1);
346 | tic
347 | Cm = zeros(2,2,2000000);
348 | for k1=1:2000000
349 | Cm(:,:,k1) = A(:,:,k1) * B(:,:,k1);
350 | end
351 | tm(k) = toc;
352 | end
353 | % mtimesx
354 | tx = zeros(1,n);
355 | for k=1:n
356 | clear Cx
357 | tic
358 | Cx = mtimesx(A,B);
359 | tx(k) = toc;
360 | end
361 | % results
362 | tm = median(tm);
363 | tx = median(tx);
364 | if( tx < tm )
365 | faster = sprintf('%7.1f',100*(tm)/tx-100);
366 | slower = '';
367 | else
368 | faster = sprintf('%7.1f',-(100*(tx)/tm-100));
369 | slower = ' (i.e., slower)';
370 | end
371 | Cr{4,m} = faster;
372 | disp(' ');
373 | disp(['mtimes Elapsed time ' num2str(tm) ' seconds.']);
374 | disp(['MTIMESX Elapsed time ' num2str(tx) ' seconds.']);
375 | disp(['MTIMESX ' mtimesx ' mode is ' faster '% faster than MATLAB mtimes' slower])
376 | if( isequal(Cx,Cm) )
377 | disp(['MTIMESX ' mtimesx ' mode result matches mtimes: EQUAL'])
378 | else
379 | dx = max(abs(Cx(:)-Cm(:)));
380 | disp(['MTIMESX ' mtimesx ' mode result does not match mtimes: NOT EQUAL , max diff = ' num2str(dx)])
381 | end
382 |
383 | disp(' ');
384 | disp('--------------------------------------------------------------');
385 | disp('(real 2x2x2000000) * (real 1x1x2000000) example');
386 | Cr{5,1} = '(2x2xN) *(1x1xN)';
387 | A = rand(2,2,2000000);
388 | B = rand(1,1,2000000);
389 | % mtimes
390 | tm = zeros(1,n);
391 | for k=1:n
392 | clear Cm
393 | A(1) = 2*A(1);
394 | B(1) = 2*B(1);
395 | tic
396 | Cm = zeros(2,2,2000000);
397 | for k1=1:2000000
398 | Cm(:,:,k1) = A(:,:,k1) * B(:,:,k1);
399 | end
400 | tm(k) = toc;
401 | end
402 | % mtimesx
403 | tx = zeros(1,n);
404 | for k=1:n
405 | clear Cx
406 | tic
407 | Cx = mtimesx(A,B);
408 | tx(k) = toc;
409 | end
410 | % results
411 | tm = median(tm);
412 | tx = median(tx);
413 | if( tx < tm )
414 | faster = sprintf('%7.1f',100*(tm)/tx-100);
415 | slower = '';
416 | else
417 | faster = sprintf('%7.1f',-(100*(tx)/tm-100));
418 | slower = ' (i.e., slower)';
419 | end
420 | Cr{5,m} = faster;
421 | disp(' ');
422 | disp(['mtimes Elapsed time ' num2str(tm) ' seconds.']);
423 | disp(['MTIMESX Elapsed time ' num2str(tx) ' seconds.']);
424 | disp(['MTIMESX ' mtimesx ' mode is ' faster '% faster than MATLAB mtimes' slower])
425 | if( isequal(Cx,Cm) )
426 | disp(['MTIMESX ' mtimesx ' mode result matches mtimes: EQUAL'])
427 | else
428 | dx = max(abs(Cx(:)-Cm(:)));
429 | disp(['MTIMESX ' mtimesx ' mode result does not match mtimes: NOT EQUAL , max diff = ' num2str(dx)])
430 | end
431 |
432 | try
433 | bsxfun(@times,1,1);
434 | Cr{6,1} = 'above vs bsxfun';
435 | A = rand(2,2,2000000);
436 | B = rand(1,1,2000000);
437 | % bsxfun
438 | tm = zeros(1,n);
439 | for k=1:n
440 | clear Cm
441 | A(1) = 2*A(1);
442 | B(1) = 2*B(1);
443 | tic
444 | Cm = bsxfun(@times,A,B);
445 | tm(k) = toc;
446 | end
447 | % mtimesx
448 | tx = zeros(1,n);
449 | for k=1:n
450 | clear Cx
451 | tic
452 | Cx = mtimesx(A,B);
453 | tx(k) = toc;
454 | end
455 | % results
456 | tm = median(tm);
457 | tx = median(tx);
458 | if( tx < tm )
459 | faster = sprintf('%7.1f',100*(tm)/tx-100);
460 | slower = '';
461 | else
462 | faster = sprintf('%7.1f',-(100*(tx)/tm-100));
463 | slower = ' (i.e., slower)';
464 | end
465 | Cr{6,m} = faster;
466 | disp(' ');
467 | disp(['bsxfun Elapsed time ' num2str(tm) ' seconds.']);
468 | disp(['MTIMESX Elapsed time ' num2str(tx) ' seconds.']);
469 | disp(['MTIMESX ' mtimesx ' mode is ' faster '% faster than MATLAB bsxfun with @times' slower])
470 | if( isequal(Cx,Cm) )
471 | disp(['MTIMESX ' mtimesx ' mode result matches bsxfun with @times: EQUAL'])
472 | else
473 | dx = max(abs(Cx(:)-Cm(:)));
474 | disp(['MTIMESX ' mtimesx ' mode result does not match bsxfun with @times: NOT EQUAL , max diff = ' num2str(dx)])
475 | end
476 | catch
477 | disp('Could not perform comparison with bsxfun, possibly because your version of');
478 | disp('MATLAB does not have it. You can download a substitute for bsxfun from the');
479 | disp('FEX here: http://www.mathworks.com/matlabcentral/fileexchange/23005-bsxfun-substitute');
480 | end
481 |
482 | end
483 |
484 | disp(' ');
485 | disp('Percent Faster Results Table');
486 | disp(' ');
487 | disp(Cr);
488 |
489 | disp(' ');
490 | disp('Done');
491 | disp(' ');
492 |
493 | end
494 |
--------------------------------------------------------------------------------
/external_libs/mtimesx/mtimesx_build.m:
--------------------------------------------------------------------------------
1 | % mtimesx_build compiles mtimesx.c with BLAS libraries
2 | %******************************************************************************
3 | %
4 | % MATLAB (R) is a trademark of The Mathworks (R) Corporation
5 | %
6 | % Function: mtimesx_build
7 | % Filename: mtimesx_build.m
8 | % Programmer: James Tursa
9 | % Version: 1.40
10 | % Date: October 4, 2010
11 | % Copyright: (c) 2009, 2010 by James Tursa, All Rights Reserved
12 | %
13 | % This code uses the BSD License:
14 | %
15 | % Redistribution and use in source and binary forms, with or without
16 | % modification, are permitted provided that the following conditions are
17 | % met:
18 | %
19 | % * Redistributions of source code must retain the above copyright
20 | % notice, this list of conditions and the following disclaimer.
21 | % * Redistributions in binary form must reproduce the above copyright
22 | % notice, this list of conditions and the following disclaimer in
23 | % the documentation and/or other materials provided with the distribution
24 | %
25 | % THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
26 | % AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
27 | % IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
28 | % ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
29 | % LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
30 | % CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
31 | % SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
32 | % INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
33 | % CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
34 | % ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
35 | % POSSIBILITY OF SUCH DAMAGE.
36 | %
37 | %--
38 | %
39 | % mtimesx_build compiles mtimesx.c and mtimesx_RealTimesReal.c with the BLAS
40 | % libraries libmwblas.lib (if present) or libmwlapack.lib (if libmwblas.lib
41 | % is not present). This function basically works as follows:
42 | %
43 | % - Opens the current mexopts.bat file in the directory [prefdir], and
44 | % checks to make sure that the compiler selected is cl or lcc. If it
45 | % is not, then a warning is issued and the compilation continues with
46 | % the assumption that the microsoft BLAS libraries will work.
47 | %
48 | % - Looks for the file libmwblas.lib or libmwlapack.lib files in the
49 | % appropriate directory: [matlabroot '\extern\lib\win32\microsoft']
50 | % or [matlabroot '\extern\lib\win32\lcc']
51 | % or [matlabroot '\extern\lib\win64\microsoft']
52 | % or [matlabroot '\extern\lib\win64\lcc']
53 | %
54 | % - Changes directory to the directory of the file mtimesx.m.
55 | %
56 | % - Compiles mtimesx.c (which includes mtimesx_RealTimesReal.c) along with
57 | % either libmwblas.lib or libmwlapack.lib depending on the version of
58 | % MATLAB. The resulting exedcutable mex file is placed in the same
59 | % directory as the source code. The files mtimesx.m, mtimesx.c, and
60 | % mtimesx_RealTimesReal.c must all be in the same directory.
61 | %
62 | % - Changes the directory back to the original directory.
63 | %
64 | % Change Log:
65 | % 2009/Sep/27 --> 1.00, Initial Release
66 | % 2010/Feb/15 --> 1.10, Fixed largearrardims typo to largeArrayDims
67 | % 2010/Oct/04 --> 1.40, Updated support for OpenMP compiling
68 | %
69 | %**************************************************************************
70 |
71 | function mtimesx_build(x)
72 | disp(' ');
73 | disp('... Build routine for mtimesx');
74 |
75 | TRUE = 1;
76 | FALSE = 0;
77 |
78 | %\
79 | % Check for number of inputs & outputs
80 | %/
81 |
82 | noopenmp = FALSE;
83 | if( nargin == 1 )
84 | if( isequal(upper(x),'NOOPENMP') )
85 | noopenmp = TRUE;
86 | else
87 | error('Invalid input.');
88 | end
89 | elseif( nargin ~= 0 )
90 | error('Too many inputs. Expected none.');
91 | end
92 | if( nargout ~= 0 )
93 | error('Too many outputs. Expected none.');
94 | end
95 |
96 | %\
97 | % Check for non-PC
98 | %/
99 |
100 | disp('... Checking for PC');
101 | try
102 | % ispc does not appear in MATLAB 5.3
103 | pc = ispc ;
104 | catch
105 | % if ispc fails, assume we are on a Windows PC if it's not unix
106 | pc = ~isunix ;
107 | end
108 |
109 | if( ~pc )
110 | disp('building linux version');
111 | mex('mtimesx.c','-DDEFINEUNIX','-largeArrayDims','-lmwblas');
112 | return;
113 | end
114 |
115 | %\
116 | % Check to see that mtimesx.c source code is present
117 | %/
118 |
119 | disp('... Finding path of mtimesx C source code files');
120 | try
121 | mname = mfilename('fullpath');
122 | catch
123 | mname = mfilename;
124 | end
125 | cname = [mname(1:end-6) '.c'];
126 | if( isempty(dir(cname)) )
127 | disp('Cannot find the file mtimesx.c in the same directory as the');
128 | disp('file mtimesx_build.m. Please ensure that they are in the same');
129 | disp('directory and try again. The following file was not found:');
130 | disp(' ');
131 | disp(cname);
132 | disp(' ');
133 | error('Unable to compile mtimesx.c');
134 | end
135 | disp(['... Found file mtimesx.c in ' cname]);
136 |
137 | %\
138 | % Check to see that mtimesx_RealTimesReal.c source code is present
139 | %/
140 |
141 | rname = [mname(1:end-13) 'mtimesx_RealTimesReal.c'];
142 | if( isempty(dir(rname)) )
143 | disp('Cannot find the file mtimesx_RealTimesReal.c in the same');
144 | disp('directory as the file mtimesx_build.m. Please ensure that');
145 | disp('they are in the same directory and try again. The');
146 | disp('following file was not found:');
147 | disp(' ');
148 | disp(rname);
149 | disp(' ');
150 | error('Unable to compile mtimesx.c');
151 | end
152 | disp(['... Found file mtimesx_RealTimesReal.c in ' rname]);
153 |
154 | %\
155 | % Open the current mexopts.bat file
156 | %/
157 |
158 | matlab_ver = version('-release');
159 | if str2num(matlab_ver(1:4)) >= 2014
160 | mexopts = [prefdir '\mex_C++_win64.xml'];
161 | else
162 | mexopts = [prefdir '\mexopts.bat'];
163 | end
164 | fid = fopen(mexopts);
165 | if( fid == -1 )
166 | error('A C/C++ compiler has not been selected with mex -setup');
167 | end
168 | disp(['... Opened the mexopts.bat file in ' mexopts]);
169 | disp('... Reading the mexopts.bat file to find the compiler and options used.');
170 |
171 | %\
172 | % Check for the correct compiler selected.
173 | %/
174 |
175 | ok_cl = FALSE;
176 | ok_lcc = FALSE;
177 | omp_option = '';
178 | compiler = '(unknown)';
179 | compilername = '';
180 | while( TRUE )
181 | tline = fgets(fid);
182 | if( isequal(tline,-1) )
183 | break;
184 | else
185 | if( isempty(compilername) )
186 | y = findstr(tline,'OPTS.BAT');
187 | if( ~isempty(y) )
188 | x = findstr(tline,'rem ');
189 | if( ~isempty(x) )
190 | compilername = tline(x+4:y-1);
191 | end
192 | end
193 | end
194 | x = findstr(tline,'COMPILER=lcc');
195 | if( ~isempty(x) )
196 | ok_lcc = TRUE;
197 | libdir = 'lcc';
198 | compiler = 'LCC';
199 | disp(['... ' compiler ' is the selected compiler']);
200 | break;
201 | end
202 | x = findstr(tline,'COMPILER=cl');
203 | if( ~isempty(x) )
204 | ok_cl = TRUE;
205 | libdir = 'microsoft';
206 | compiler = ['Microsoft_' compilername '_cl'];
207 | omp_option = ' /openmp';
208 | disp(['... ' compiler ' is the selected compiler']);
209 | break;
210 | end
211 | x = findstr(tline,'COMPILER=bcc32');
212 | if( ~isempty(x) )
213 | ok_cl = TRUE;
214 | libdir = 'microsoft';
215 | compiler = ['Borland_' compilername '_bcc32'];
216 | disp(['... ' compiler ' is the selected compiler']);
217 | disp('... Assuming that Borland will link with Microsoft libraries');
218 | break;
219 | end
220 | x = findstr(tline,'COMPILER=icl');
221 | if( ~isempty(x) )
222 | ok_cl = TRUE;
223 | if( pc )
224 | omp_option = ' -Qopenmp';
225 | else
226 | omp_option = ' -openmp';
227 | end
228 | libdir = 'microsoft';
229 | compiler = ['Intel_' compilername '_icl'];
230 | disp(['... ' compiler ' is the selected compiler']);
231 | disp('... Assuming that Intel will link with Microsoft libraries');
232 | break;
233 | end
234 | x = findstr(tline,'COMPILER=wc1386');
235 | if( ~isempty(x) )
236 | ok_cl = TRUE;
237 | libdir = 'microsoft';
238 | compiler = ['Watcom_' compilername '_wc1386'];
239 | disp(['... ' compiler ' is the selected compiler']);
240 | disp('... Assuming that Watcom will link with Microsoft libraries');
241 | break;
242 | end
243 | x = findstr(tline,'COMPILER=gcc');
244 | if( ~isempty(x) )
245 | ok_cl = TRUE;
246 | libdir = 'microsoft';
247 | omp_option = ' -fopenmp';
248 | compiler = 'GCC';
249 | disp(['... ' compiler ' is the selected compiler']);
250 | disp('... Assuming that GCC will link with Microsoft libraries');
251 | break;
252 | end
253 | end
254 | end
255 | fclose(fid);
256 |
257 | %\
258 | % MS Visual C/C++ or lcc compiler has not been selected
259 | %/
260 |
261 | if( ~(ok_cl | ok_lcc) )
262 | warning('... Supported C/C++ compiler has not been selected with mex -setup');
263 | warning('... Assuming that Selected Compiler will link with Microsoft libraries');
264 | warning('... Continuing at risk ...');
265 | libdir = 'microsoft';
266 | end
267 |
268 | %\
269 | % If an OpenMP supported compiler is potentially present, make sure that the
270 | % necessary compile option is present in the mexopts.bat file on the COMPFLAGS
271 | % line. If necessary, build a new mexopts.bat file with the correct option
272 | % added to the COMPFLAGS line.
273 | %/
274 |
275 | while( TRUE )
276 | ok_openmp = FALSE;
277 | ok_compflags = FALSE;
278 | xname = '';
279 | if( isempty(omp_option) )
280 | disp('... OpenMP compiler not detected ... you may want to check this website:');
281 | disp(' http://openmp.org/wp/openmp-compilers/');
282 | elseif( noopenmp )
283 | disp(['... OpenMP compiler potentially detected, but not checking for ''' omp_option ''' compile option']);
284 | else
285 | disp('... OpenMP compiler potentially detected');
286 | disp(['... Checking to see that the ''' omp_option ''' compile option is present']);
287 | fid = fopen(mexopts);
288 | while( TRUE )
289 | tline = fgets(fid);
290 | if( isequal(tline,-1) )
291 | break;
292 | else
293 | x = findstr(tline,'set COMPFLAGS');
294 | if( ~isempty(x) )
295 | ok_compflags = TRUE;
296 | x = findstr(tline,omp_option);
297 | if( ~isempty(x) )
298 | ok_openmp = TRUE;
299 | end
300 | break;
301 | end
302 | end
303 | end
304 | fclose(fid);
305 | if( ~ok_compflags )
306 | warning(['... COMPFLAGS line not found ... ''' omp_option ''' will not be added.']);
307 | elseif( ~ok_openmp )
308 | disp(['... The ''' omp_option ''' compile option is not present ... adding it']);
309 | xname = [mname(1:end-6) '_mexopts.bat'];
310 | disp(['... Creating custom options file ' xname ' with the ''' omp_option ''' option added.']);
311 | fid = fopen(mexopts);
312 | fidx = fopen(xname,'w');
313 | if( fidx == -1 )
314 | xname = '';
315 | warning(['... Unable to create custom mexopts.bat file ... ''' omp_option ''' will not be added']);
316 | else
317 | while( TRUE )
318 | tline = fgets(fid);
319 | if( isequal(tline,-1) )
320 | break;
321 | else
322 | x = findstr(tline,'set COMPFLAGS');
323 | if( ~isempty(x) )
324 | n = numel(tline);
325 | e = n;
326 | while( tline(e) < 32 )
327 | e = e - 1;
328 | end
329 | tline = [tline(1:e) omp_option tline(e+1:n)];
330 | end
331 | fwrite(fidx,tline);
332 | end
333 | end
334 | fclose(fidx);
335 | end
336 | fclose(fid);
337 | end
338 | end
339 |
340 | %\
341 | % Construct full file name of libmwblas.lib and libmwlapack.lib. Note that
342 | % not all versions have both files. Earlier versions only had the lapack
343 | % file, which contained both blas and lapack routines.
344 | %/
345 |
346 | comp = computer;
347 | mext = mexext;
348 | lc = length(comp);
349 | lm = length(mext);
350 | cbits = comp(max(1:lc-1):lc);
351 | mbits = mext(max(1:lm-1):lm);
352 | if( isequal(cbits,'64') | isequal(mbits,'64') )
353 | compdir = 'win64';
354 | largearraydims = '-largeArrayDims';
355 | else
356 | compdir = 'win32';
357 | largearraydims = '';
358 | end
359 |
360 | lib_blas = [matlabroot '\extern\lib\' compdir '\' libdir '\libmwblas.lib'];
361 | d = dir(lib_blas);
362 | if( isempty(d) )
363 | disp('... BLAS library file not found, so linking with the LAPACK library');
364 | lib_blas = [matlabroot '\extern\lib\' compdir '\' libdir '\libmwlapack.lib'];
365 | end
366 | disp(['... Using BLAS library lib_blas = ''' lib_blas '''']);
367 |
368 | %\
369 | % Save old directory and change to source code directory
370 | %/
371 |
372 | cdold = cd;
373 | if( length(mname) > 13 )
374 | cd(mname(1:end-13));
375 | end
376 |
377 | %\
378 | % Do the compile
379 | %/
380 |
381 | disp('... Now attempting to compile ...');
382 | disp(' ');
383 | try
384 | if( isunix )
385 | if( isempty(largearraydims) )
386 | if( isempty(xname) )
387 | disp(['mex(''-DDEFINEUNIX'',''' cname ''',lib_blas,''-DCOMPILER=' compiler ''')']);
388 | disp(' ');
389 | mex('-DDEFINEUNIX',cname,lib_blas,['-DCOMPILER=' compiler]);
390 | else
391 | disp(['mex(''-f'',''' xname ''',''-DDEFINEUNIX'',''' cname ''',lib_blas,''-DCOMPILER=' compiler ''')']);
392 | disp(' ');
393 | mex('-f',xname,'-DDEFINEUNIX',cname,lib_blas,['-DCOMPILER=' compiler]);
394 | end
395 | else
396 | if( isempty(xname) )
397 | disp(['mex(''-DDEFINEUNIX'',''' cname ''',''' largearraydims ''',lib_blas,''-DCOMPILER=' compiler ''')']);
398 | disp(' ');
399 | mex('-DDEFINEUNIX',largearraydims,cname,lib_blas,['-DCOMPILER=' compiler]);
400 | else
401 | disp(['mex(''-f'',''' xname ''',''-DDEFINEUNIX'',''' cname ''',''' largearraydims ''',lib_blas,''-DCOMPILER=' compiler ''')']);
402 | disp(' ');
403 | mex('-f',xname,'-DDEFINEUNIX',largearraydims,cname,lib_blas,['-DCOMPILER=' compiler]);
404 | end
405 | end
406 | else
407 | if( isempty(largearraydims) )
408 | if( isempty(xname) )
409 | disp(['mex(''' cname ''',lib_blas,''-DCOMPILER=' compiler ''')']);
410 | disp(' ');
411 | mex(cname,lib_blas,['-DCOMPILER=' compiler]);
412 | else
413 | disp(['mex(''-f'',''' xname ''',''' cname ''',lib_blas,''-DCOMPILER=' compiler ''')']);
414 | disp(' ');
415 | mex('-f',xname,cname,lib_blas,['-DCOMPILER=' compiler]);
416 | end
417 | else
418 | if( isempty(xname) )
419 | disp(['mex(''' cname ''',''' largearraydims ''',lib_blas,''-DCOMPILER=' compiler ''')']);
420 | disp(' ');
421 | mex(cname,largearraydims,lib_blas,['-DCOMPILER=' compiler]);
422 | else
423 | disp(['mex(''-f'',''' xname ''',''' cname ''',''' largearraydims ''',lib_blas,''-DCOMPILER=' compiler ''')']);
424 | disp(' ');
425 | mex('-f',xname,cname,largearraydims,lib_blas,['-DCOMPILER=' compiler]);
426 | end
427 | end
428 | end
429 | disp('... mex mtimesx.c build completed ... you may now use mtimesx.');
430 | disp(' ');
431 | mtimesx;
432 | break;
433 | catch
434 | if( noopenmp )
435 | cd(cdold);
436 | disp(' ');
437 | disp('... Well, *that* didn''t work either!');
438 | disp(' ');
439 | disp('The mex command failed. This may be because you have already run');
440 | disp('mex -setup and selected a non-C compiler, such as Fortran. If this');
441 | disp('is the case, then rerun mex -setup and select a C/C++ compiler.');
442 | disp(' ');
443 | error('Unable to compile mtimesx.c');
444 | else
445 | disp(' ');
446 | disp('... Well, *that* didn''t work ...');
447 | disp(' ');
448 | if( isequal(omp_option,' /openmp') )
449 | disp('This may be because an OpenMP compile option was added that the');
450 | disp('compiler did not like. For example, the Standard versions of the');
451 | disp('Microsoft C/C++ compilers do not support OpenMP, only the');
452 | disp('Professional versions do. Attempting to compile again but this');
453 | disp(['time will not add the ''' omp_option ''' option.'])
454 | else
455 | disp('This may be because an OpenMP compile option was added that the');
456 | disp('compiler did not like. Attempting to compile again, but this time');
457 | disp(['will not add the ''' omp_option ''' option.'])
458 | end
459 | disp(' ');
460 | noopenmp = TRUE;
461 | end
462 | end
463 | end
464 |
465 | %\
466 | % Restore old directory
467 | %/
468 |
469 | cd(cdold);
470 |
471 | return
472 | end
473 |
--------------------------------------------------------------------------------
/implementation/tracker.m:
--------------------------------------------------------------------------------
1 | function results = tracker(p, im, bg_area, fg_area, area_resize_factor)
2 |
3 | %% key parameters
4 | two_feature = p.two_feature;
5 | if two_feature
6 | feat_num = 2;
7 | feat_dim{1} = p.feat1dim;
8 | feat_dim{2} = p.feat2dim;
9 | else
10 | feat_num = 1;
11 | feat_dim{1} = p.feat1dim;
12 | end
13 | dim_att = p.dim_att;
14 | dim_act_threshold = p.dim_act_threshold;
15 | if dim_att
16 | dim_wlr = p.dim_wlr;
17 | end
18 | st_att = p.st_att;
19 | if st_att
20 | pos_lr = p.pos_lr;
21 | end
22 |
23 | %% Intrinsic parameters
24 | feat_type = p.feat_type;
25 | layerInd = p.layerInd;
26 |
27 | lambda1 = p.lambda1;
28 | lambda2 = p.lambda2;
29 | features = p.t_features;
30 | global_feat_params = p.t_global;
31 | num_frames = numel(p.img_files);
32 | s_frames = p.s_frames;
33 | video_path = p.video_path;
34 | % used for benchmark
35 | rect_positions = zeros(num_frames, 4);
36 | pos = p.init_pos;
37 | target_sz = p.target_sz;
38 | hann_window_cosine = single(hann(p.cf_response_size(1)) * hann(p.cf_response_size(2))');
39 |
40 | offset = [-target_sz(1) 0; 0 -target_sz(2); target_sz(1) 0; 0 target_sz(2)];
41 | output_sigma{1} = sqrt(prod(p.norm_target_sz)) * p.output_sigma_factor{1} / p.hog_cell_size;
42 | y{1} = gaussianResponse(p.cf_response_size, output_sigma{1});
43 | yf{1} = fft2(y{1});
44 | if two_feature
45 | output_sigma{2} = sqrt(prod(p.norm_target_sz)) * p.output_sigma_factor{2} / p.hog_cell_size;
46 | y{2} = gaussianResponse(p.cf_response_size, output_sigma{2});
47 | yf{2} = fft2(y{2});
48 | end
49 |
50 | % variables initialization
51 | model_x_f = cell(2,1);
52 | model_w_f = cell(2,1);
53 | z = cell(2,1);
54 | z_f = cell(2,1);
55 | kz_f = cell(2,1);
56 | x = cell(2,1);
57 | x_f = cell(2,1);
58 | k_f = cell(2,1);
59 | learning_rate_pwp = p.learning_rate_pwp;
60 | % patch of the target + padding
61 | patch_padded = getSubwindow(im, pos, p.norm_bg_area, bg_area);
62 | new_pwp_model = true;
63 | [bg_hist, fg_hist] = updateHistModel(new_pwp_model, patch_padded, bg_area, fg_area, target_sz, p.norm_bg_area, p.n_bins, p.grayscale_sequence);
64 | new_pwp_model = false;
65 |
66 | %% Scale filter
67 | % from DSST
68 | p.num_scales = 33;
69 | p.hog_scale_cell_size = 4;
70 | p.learning_rate_scale = 0.025;
71 | p.scale_sigma_factor = 1/2;
72 | p.scale_model_factor = 1.0;
73 | p.scale_step = 1.03;
74 | p.scale_model_max_area = 32*16;
75 | p.lambda = 1e-4;
76 |
77 | scale_factor = 1;
78 | scale_base_target_sz = target_sz;
79 | scale_sigma = sqrt(p.num_scales) * p.scale_sigma_factor;
80 | ss = (1:p.num_scales) - ceil(p.num_scales/2);
81 | ys = exp(-0.5 * (ss.^2) / scale_sigma^2);
82 | ysf = single(fft(ys));
83 | if mod(p.num_scales,2) == 0
84 | scale_window = single(hann(p.num_scales+1));
85 | scale_window = scale_window(2:end);
86 | else
87 | scale_window = single(hann(p.num_scales));
88 | end
89 | ss = 1:p.num_scales;
90 | scale_factors = p.scale_step.^(ceil(p.num_scales/2) - ss);
91 | if p.scale_model_factor^2 * prod(p.norm_target_sz) > p.scale_model_max_area
92 | p.scale_model_factor = sqrt(p.scale_model_max_area/prod(p.norm_target_sz));
93 | end
94 | scale_model_sz = floor(p.norm_target_sz * p.scale_model_factor);
95 | % find maximum and minimum scales
96 | min_scale_factor = p.scale_step ^ ceil(log(max(5 ./ bg_area)) / log(p.scale_step));
97 | max_scale_factor = p.scale_step ^ floor(log(min([size(im,1) size(im,2)] ./ target_sz)) / log(p.scale_step));
98 |
99 | % initialization
100 | trans_vec = [];
101 |
102 | %% MAIN LOOP
103 | t_imread = 0;
104 | tic;
105 | for frame = 1:num_frames
106 | if frame > 1
107 | tic_imread = tic;
108 | % Load the image at the current frame
109 | im = imread([s_frames{frame}]);
110 | t_imread = t_imread + toc(tic_imread);
111 |
112 | %% TESTING step
113 | im_patch_cf = getSubwindow(im, pos, p.norm_bg_area, bg_area);
114 | likelihood_map = getColourMap(im_patch_cf, bg_hist, fg_hist, p.n_bins, p.grayscale_sequence);
115 | likelihood_map(isnan(likelihood_map)) = 0;
116 | likelihood_map = imResample(likelihood_map, p.cf_response_size);
117 | likelihood_map = (likelihood_map + min(likelihood_map(:)))/(max(likelihood_map(:)) + min(likelihood_map(:)));
118 | if (sum(likelihood_map(:))/prod(p.cf_response_size)<0.01)
119 | likelihood_map = 1;
120 | end
121 | likelihood_map = max(likelihood_map, 0.1);
122 | hann_window = hann_window_cosine .* likelihood_map;
123 | if ~dim_att
124 | for M = 1:feat_num
125 | z{M} = bsxfun(@times, get_features(im_patch_cf, features, global_feat_params, feat_type{M}, layerInd{M}), hann_window);
126 | z_f{M} = double(fft2(z{M}));
127 | switch p.kernel_type{M}
128 | case 'gaussian'
129 | kz_f{M} = gaussian_correlation(z_f{M}, model_x_f{M}, p.tran_sigma{M});
130 | case 'polynomial'
131 | kz_f{M} = polynomial_correlation(z_f{M}, model_x_f{M}, p.polya{M}, p.polyb{M});
132 | end
133 | end
134 | response_cf{1} = real(ifft2(model_w_f{1} .* kz_f{1}));
135 | % Crop square search region (in feature pixels).
136 | response_cf{1} = cropFilterResponse(response_cf{1},floor_odd(p.norm_delta_area / p.hog_cell_size));
137 | if two_feature
138 | response_cf{2} = real(ifft2(model_w_f{2} .* kz_f{2}));
139 | response_cf{2} = cropFilterResponse(response_cf{2},floor_odd(p.norm_delta_area / p.hog_cell_size));
140 | end
141 | else
142 | shift_hann = circshift(hann_window_cosine, -floor(p.cf_response_size(1:2)/2));
143 | for M = 1:feat_num
144 | z{M} = bsxfun(@times, get_features(im_patch_cf, features, global_feat_params, feat_type{M}, layerInd{M}), hann_window);
145 | z_f{M} = double(fft2(z{M}));
146 | size_zf = size(z_f{M});
147 | switch p.kernel_type{M}
148 | case 'gaussian'
149 | for d = 1:feat_dim{M}
150 | kz_f{M}(:,:,d) = gaussian_correlation(z_f{M}(:,:,d), model_x_f{M}(:,:,d), p.tran_sigma{M});
151 | end
152 | case 'polynomial'
153 | for d = 1:feat_dim{M}
154 | kz_f{M}(:,:,d) = polynomial_correlation(z_f{M}(:,:,d), model_x_f{M}(:,:,d), p.polya{M}, p.polyb{M});
155 | end
156 | end
157 | end
158 | for M = 1:feat_num
159 | response_cf_chann{M} = real(ifft2(model_w_f{M} .* kz_f{M}));
160 | response_cf_ca{M} = bsxfun(@times, response_cf_chann{M}, reshape(model_chann_w{M}, 1, 1, size(response_cf_chann{M},3)));
161 | if st_att
162 | pa_map{M} = pos_attention(response_cf_ca{M}, hann_window, frame, target_sz, trans_vec);
163 | if frame == 2
164 | model_pa_map{M} = pa_map{M};
165 | else
166 | model_pa_map{M} = pos_lr * pa_map{M} + (1-pos_lr) * model_pa_map{M};
167 | end
168 | response_cf_cpa{M} = bsxfun(@times, response_cf_ca{M}, model_pa_map{M});
169 | response_cf{M} = sum(response_cf_cpa{M}, 3);
170 | else
171 | response_cf{M} = sum(response_cf_ca{M}, 3);
172 | end
173 | % Crop square search region (in feature pixels).
174 | response_cf{M} = cropFilterResponse(response_cf{M},floor_odd(p.norm_delta_area / p.hog_cell_size));
175 | end
176 | end
177 |
178 | if p.context_att
179 | if mod(frame - 1, p.bgl_interv) == 0
180 | gPMER(frame-1) = calPMER(response_cf{1});
181 | feat_order = 1;
182 | z_bf{feat_order} = zeros([size(x_f{feat_order}) length(offset)], 'single');
183 | for j = 1:length(offset)
184 | im_patch_bg = getSubwindow(im, pos+offset(j,:), p.norm_bg_area, bg_area);
185 | z_b = bsxfun(@times, get_features(im_patch_bg, features, global_feat_params, feat_type{feat_order}, layerInd{feat_order}), hann_window_cosine);
186 | z_bf{feat_order}(:,:,:,j) = fft2(z_b);
187 | switch p.kernel_type{feat_order}
188 | case 'gaussian'
189 | kz_bf{feat_order}(:,:,j) = gaussian_correlation(z_bf{feat_order}(:,:,:,j), z_bf{feat_order}(:,:,:,j), p.tran_sigma{feat_order});
190 | case 'polynomial'
191 | kz_bf{feat_order}(:,:,j) = polynomial_correlation(z_bf{feat_order}(:,:,:,j), z_bf{feat_order}(:,:,:,j), p.polya{feat_order}, p.polyb{feat_order});
192 | end
193 | response_context = real(ifft2(model_w_f{1} .* kz_bf{feat_order}(:,:,j)));
194 | % Crop square search region (in feature pixels).
195 | response_context = cropFilterResponse(response_context,floor_odd(p.norm_delta_area / p.hog_cell_size));
196 | cPMER(frame-1,j) = calPMER(response_context);
197 | end
198 | part_i = cPMER(frame-1,:) / gPMER(frame-1);
199 | part_i = max(part_i, 0.3);
200 | % activation and normalization to 1
201 | penalty(frame,:) = 4 * part_i.^2 / sumsqr(part_i);
202 | model_p(frame,:) = 0.2 * penalty(frame,:) + 0.8 * model_p(frame-p.bgl_interv,:);
203 | end
204 | end
205 |
206 | % Scale up to match center likelihood resolution.
207 | response_cf{1} = mexResize(response_cf{1}, p.norm_delta_area,'auto');
208 | if two_feature
209 | response_cf{2} = mexResize(response_cf{2}, p.norm_delta_area,'auto');
210 | p1 = adaptive_weight(response_cf{1});
211 | p2 = adaptive_weight(response_cf{2});
212 | sum_p = p1 + p2;
213 | p1 = p1/sum_p; p2 = p2/sum_p;
214 | response_cf_all = ...
215 | (p1.*response_cf{1}./max(response_cf{1}(:))) + ...
216 | (p2.*response_cf{2}./max(response_cf{2}(:)));
217 | else
218 | response_cf_all = response_cf{1};
219 | end
220 | center = (1+p.norm_delta_area) / 2;
221 | response = response_cf_all;
222 |
223 | [row, col] = find(response == max(response(:)));
224 | row = row(1);
225 | col = col(1);
226 | delta_row = row - center(1);
227 | delta_col = col - center(2);
228 | % sprintf("frame: %d", frame)
229 | trans_vec = ([delta_row, delta_col]) / area_resize_factor;
230 | pos = pos + trans_vec;
231 | % pos = pos(1:2); % avoid more than one max points
232 | rect_position = [pos([2,1]) - target_sz([2,1])/2, target_sz([2,1])];
233 | %% SCALE SPACE SEARCH
234 | im_patch_scale = getScaleSubwindow(im, pos, scale_base_target_sz, scale_factor * scale_factors, scale_window, scale_model_sz, p.hog_scale_cell_size);
235 | xsf = fft(im_patch_scale,[],2);
236 | scale_response = real(ifft(sum(sf_num .* xsf, 1) ./ (sf_den + p.lambda) ));
237 | recovered_scale = ind2sub(size(scale_response),find(scale_response == max(scale_response(:)), 1));
238 | %set the scale
239 | scale_factor = scale_factor * scale_factors(recovered_scale);
240 |
241 | if scale_factor < min_scale_factor
242 | scale_factor = min_scale_factor;
243 | elseif scale_factor > max_scale_factor
244 | scale_factor = max_scale_factor;
245 | end
246 | % use new scale to update bboxes for target, filter, bg and fg models
247 | target_sz = round(scale_base_target_sz * scale_factor);
248 | p.avg_dim = sum(target_sz)/2;
249 | bg_area = round(target_sz + p.avg_dim * p.padding);
250 | if(bg_area(2)>size(im,2)), bg_area(2)=size(im,2)-1; end
251 | if(bg_area(1)>size(im,1)), bg_area(1)=size(im,1)-1; end
252 |
253 | bg_area = bg_area - mod(bg_area - target_sz, 2);
254 | fg_area = round(target_sz - p.avg_dim * p.inner_padding);
255 | fg_area = fg_area + mod(bg_area - fg_area, 2);
256 | % Compute the rectangle with (or close to) params.fixed_area and same aspect ratio as the target bboxgetScaleSubwindow
257 | area_resize_factor = sqrt(p.fixed_area/prod(bg_area));
258 | end
259 |
260 | %% Train and Update Model
261 | obj = getSubwindow(im, pos, target_sz);
262 | im_patch_fg = getSubwindow(im, pos, p.norm_bg_area, bg_area);
263 | for M = 1:feat_num
264 | x{M} = bsxfun(@times, get_features(im_patch_fg, features, global_feat_params, feat_type{M}, layerInd{M}), hann_window_cosine);
265 | x_f{M} = double(fft2(x{M}));
266 | size_xf = size(x_f{M});
267 | if dim_att
268 | switch p.kernel_type{M}
269 | case 'gaussian'
270 | for d = 1:feat_dim{M}
271 | k_f{M}(:,:,d) = gaussian_correlation(x_f{M}(:,:,d), x_f{M}(:,:,d), p.tran_sigma{M});
272 | end
273 | case 'polynomial'
274 | for d = 1:feat_dim{M}
275 | k_f{M}(:,:,d) = polynomial_correlation(x_f{M}(:,:,d), x_f{M}(:,:,d), p.polya{M}, p.polyb{M});
276 | end
277 | end
278 | else
279 | switch p.kernel_type{M}
280 | case 'gaussian'
281 | k_f{M} = gaussian_correlation(x_f{M}, x_f{M}, p.tran_sigma{M});
282 | case 'polynomial'
283 | k_f{M} = polynomial_correlation(x_f{M}, x_f{M}, p.polya{M}, p.polyb{M});
284 | end
285 | end
286 | end
287 |
288 | %% contextual attention
289 | if p.context_att
290 | if frame == 1
291 | model_p(1,:) = [1 1 1 1];
292 | end
293 | if mod(frame - 1, p.bgl_interv) == 0
294 | ijk = 1;
295 | x_bf{ijk} = zeros([size(x_f{ijk}) length(offset)],'single');
296 | for j = 1:length(offset)
297 | context = getSubwindow(im, pos+offset(j,:), target_sz);
298 | im_patch_bg = getSubwindow(im, pos+offset(j,:), p.norm_bg_area, bg_area);
299 | x_b = bsxfun(@times, get_features(im_patch_bg, features, global_feat_params, feat_type{ijk}, layerInd{ijk}), hann_window_cosine);
300 | x_bf{ijk}(:,:,:,j) = fft2(x_b * model_p(frame,j) * sqrt(lambda2));
301 | switch p.kernel_type{ijk}
302 | case 'gaussian'
303 | for d = 1:feat_dim{ijk}
304 | k_bf{ijk}(:,:,d,j) = gaussian_correlation(x_bf{ijk}(:,:,d,j), x_bf{ijk}(:,:,d,j), p.tran_sigma{ijk});
305 | end
306 | case 'polynomial'
307 | for d = 1:feat_dim{ijk}
308 | k_bf{ijk}(:,:,d,j) = polynomial_correlation(x_bf{ijk}(:,:,d,j), x_bf{ijk}(:,:,d,j), p.polya{ijk}, p.polyb{ijk});
309 | end
310 | end
311 | end
312 | new_wf_num{1} = k_f{1} .* yf{1};
313 | new_wf_den{1} = k_f{1} .* conj(k_f{1}) + lambda1 + sum(k_bf{1} .* conj(k_bf{1}), 4);
314 | if two_feature
315 | new_wf_num{2} = k_f{2} .* yf{2};
316 | new_wf_den{2} = k_f{2} .* conj(k_f{2}) + lambda1;
317 | end
318 | else
319 | new_wf_num{1} = k_f{1} .* yf{1};
320 | new_wf_den{1} = k_f{1} .* conj(k_f{1}) + lambda1;
321 | if two_feature
322 | new_wf_num{2} = k_f{2} .* yf{2};
323 | new_wf_den{2} = k_f{2} .* conj(k_f{2}) + lambda1;
324 | end
325 | end
326 | else
327 | for M = 1 : feat_num
328 | new_wf_num{M} = k_f{M} .* yf{M};
329 | new_wf_den{M} = k_f{M} .* conj(k_f{M}) + lambda1;
330 | end
331 | end
332 | for M = 1:feat_num
333 | w_f{M} = new_wf_num{M} ./ new_wf_den{M};
334 | end
335 |
336 | %% calculate per-channel feature weights
337 | if dim_att
338 | for M = 1:feat_num
339 | if frame == 1
340 | model_chann_w{M} = ones(1, feat_dim{M},'single');
341 | end
342 | response_lr{M} = real(ifft2(w_f{M} .* k_f{M}));
343 | chann_w{M} = (max(reshape(response_lr{M}, [size(response_lr{M},1)*size(response_lr{M},2), size(response_lr{M},3)]), [], 1) ...
344 | +mean(mean(reshape(response_lr{M}, [size(response_lr{M},1)*size(response_lr{M},2), size(response_lr{M},3)]))));
345 | chann_w{M} = feat_dim{M} * chann_w{M} / sum(chann_w{M});
346 | chann_w{M} = max(chann_w{M} - dim_act_threshold, 0) + dim_act_threshold;
347 | model_chann_w{M} = (1-dim_wlr)*model_chann_w{M} + dim_wlr*chann_w{M};
348 | model_chann_w{M} = feat_dim{M} * model_chann_w{M} / sum(model_chann_w{M});
349 | end
350 | end
351 |
352 | %% Initialization
353 | if frame == 1
354 | % first frame, train with a single image
355 | model_x_f = x_f;
356 | model_w_f = w_f;
357 | else
358 | % subsequent frames, update the model by linear interpolation
359 | for M = 1:feat_num
360 | model_x_f{M} = (1 - p.learning_rate_cf) * model_x_f{M} + p.learning_rate_cf * x_f{M};
361 | model_w_f{M} = (1 - p.learning_rate_cf) * model_w_f{M} + p.learning_rate_cf * w_f{M};
362 | end
363 | % BG/FG MODEL UPDATE patch of the target + padding
364 | im_patch_color = getSubwindow(im, pos, p.norm_bg_area, bg_area*(1-p.inner_padding));
365 | [bg_hist, fg_hist] = updateHistModel(new_pwp_model, im_patch_color, bg_area, fg_area, target_sz, p.norm_bg_area, p.n_bins, p.grayscale_sequence, bg_hist, fg_hist, learning_rate_pwp);
366 | end
367 | %% Upadate Scale
368 | im_patch_scale = getScaleSubwindow(im, pos, scale_base_target_sz, scale_factor*scale_factors, scale_window, scale_model_sz, p.hog_scale_cell_size);
369 | xsf = fft(im_patch_scale,[],2);
370 | new_sf_num = bsxfun(@times, ysf, conj(xsf));
371 | new_sf_den = sum(xsf .* conj(xsf), 1);
372 | if frame == 1
373 | sf_den = new_sf_den;
374 | sf_num = new_sf_num;
375 | else
376 | sf_den = (1 - p.learning_rate_scale) * sf_den + p.learning_rate_scale * new_sf_den;
377 | sf_num = (1 - p.learning_rate_scale) * sf_num + p.learning_rate_scale * new_sf_num;
378 | end
379 | %% update bbox position
380 | if (frame == 1)
381 | rect_position = [pos([2,1]) - target_sz([2,1])/2, target_sz([2,1])];
382 | end
383 | rect_position_padded = [pos([2,1]) - bg_area([2,1])/2, bg_area([2,1])];
384 | rect_positions(frame,:) = rect_position;
385 |
386 | elapsed_time = toc;
387 |
388 | %% Visualization
389 | if p.visualization == 1
390 | if frame == 1 %first frame, create GUI
391 | figure('Name',['Tracker - ' video_path]);
392 | im_handle = imshow(uint8(im), 'Border','tight', 'InitialMag', 100 + 100 * (length(im) < 500));
393 | rect_handle = rectangle('Position',rect_position, 'EdgeColor','g', 'LineWidth',2);
394 | rect_handle2 = rectangle('Position',rect_position_padded, 'LineWidth',2, 'LineStyle','--', 'EdgeColor','b');
395 | text_handle = text(10, 10, int2str(frame));
396 | set(text_handle, 'color', [0 1 1]);
397 | else
398 | try %subsequent frames, update GUI
399 | set(im_handle, 'CData', im);
400 | set(rect_handle, 'Position', rect_position);
401 | set(rect_handle2, 'Position', rect_position_padded);
402 | set(text_handle, 'string', int2str(frame));
403 | catch
404 | return
405 | end
406 | end
407 | drawnow
408 | end
409 | end
410 | results.model_p = model_p;
411 |
412 | %% save data for benchmark
413 | results.type = 'rect';
414 | results.res = rect_positions;
415 | results.fps = num_frames/(elapsed_time - t_imread);
416 | fprintf('fps: %f',results.fps)
417 |
418 | end
--------------------------------------------------------------------------------
/UAV123_utils/configSeqs.m:
--------------------------------------------------------------------------------
1 | function seqs=configSeqs(database_folder, type)
2 | dataSet = database_folder;
3 |
4 | switch type
5 | case 'UAV123_20L'
6 | seqs = {struct('name','bike1','path',[dataSet '\bike1\'],'startFrame',1,'endFrame',3085,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
7 | struct('name','bird1','path',[dataSet '\bird1\'],'startFrame',1,'endFrame',2437,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
8 | struct('name','car1','path',[dataSet '\car1\'],'startFrame',1,'endFrame',2629,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
9 | struct('name','car3','path',[dataSet '\car3\'],'startFrame',1,'endFrame',1717,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
10 | struct('name','car6','path',[dataSet '\car6\'],'startFrame',1,'endFrame',4861,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
11 | struct('name','car8','path',[dataSet '\car8\'],'startFrame',1,'endFrame',2575,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
12 | struct('name','car9','path',[dataSet '\car9\'],'startFrame',1,'endFrame',1879,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
13 | struct('name','car16','path',[dataSet '\car16\'],'startFrame',1,'endFrame',1993,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
14 | struct('name','group1','path',[dataSet '\group1\'],'startFrame',1,'endFrame',4873,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
15 | struct('name','group2','path',[dataSet '\group2\'],'startFrame',1,'endFrame',2683,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
16 | struct('name','group3','path',[dataSet '\group3\'],'startFrame',1,'endFrame',5527,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
17 | struct('name','person2','path',[dataSet '\person2\'],'startFrame',1,'endFrame',2623,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
18 | struct('name','person4','path',[dataSet '\person4\'],'startFrame',1,'endFrame',2743,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
19 | struct('name','person5','path',[dataSet '\person5\'],'startFrame',1,'endFrame',2101,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
20 | struct('name','person7','path',[dataSet '\person7\'],'startFrame',1,'endFrame',2065,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
21 | struct('name','person14','path',[dataSet '\person14\'],'startFrame',1,'endFrame',2923,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
22 | struct('name','person17','path',[dataSet '\person17\'],'startFrame',1,'endFrame',2347,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
23 | struct('name','person19','path',[dataSet '\person19\'],'startFrame',1,'endFrame',4357,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
24 | struct('name','person20','path',[dataSet '\person20\'],'startFrame',1,'endFrame',1783,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
25 | struct('name','uav1','path',[dataSet '\uav1\'],'startFrame',1,'endFrame',3469,'nz',6,'ext','jpg','init_rect', [0,0,0,0])};
26 | case 'UAV123'
27 | seqs = {struct('name','bike1','path',[dataSet '\bike1\'],'startFrame',1,'endFrame',3085,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
28 | struct('name','bike2','path',[dataSet '\bike2\'],'startFrame',1,'endFrame',553,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
29 | struct('name','bike3','path',[dataSet '\bike3\'],'startFrame',1,'endFrame',433,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
30 | struct('name','bird1_1','path',[dataSet '\bird1\'],'startFrame',1,'endFrame',253,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
31 | struct('name','bird1_2','path',[dataSet '\bird1\'],'startFrame',775,'endFrame',1477,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
32 | struct('name','bird1_3','path',[dataSet '\bird1\'],'startFrame',1573,'endFrame',2437,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
33 | struct('name','boat1','path',[dataSet '\boat1\'],'startFrame',1,'endFrame',901,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
34 | struct('name','boat2','path',[dataSet '\boat2\'],'startFrame',1,'endFrame',799,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
35 | struct('name','boat3','path',[dataSet '\boat3\'],'startFrame',1,'endFrame',901,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
36 | struct('name','boat4','path',[dataSet '\boat4\'],'startFrame',1,'endFrame',553,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
37 | struct('name','boat5','path',[dataSet '\boat5\'],'startFrame',1,'endFrame',505,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
38 | struct('name','boat6','path',[dataSet '\boat6\'],'startFrame',1,'endFrame',805,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
39 | struct('name','boat7','path',[dataSet '\boat7\'],'startFrame',1,'endFrame',535,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
40 | struct('name','boat8','path',[dataSet '\boat8\'],'startFrame',1,'endFrame',685,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
41 | struct('name','boat9','path',[dataSet '\boat9\'],'startFrame',1,'endFrame',1399,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
42 | struct('name','building1','path',[dataSet '\building1\'],'startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
43 | struct('name','building2','path',[dataSet '\building2\'],'startFrame',1,'endFrame',577,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
44 | struct('name','building3','path',[dataSet '\building3\'],'startFrame',1,'endFrame',829,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
45 | struct('name','building4','path',[dataSet '\building4\'],'startFrame',1,'endFrame',787,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
46 | struct('name','building5','path',[dataSet '\building5\'],'startFrame',1,'endFrame',481,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
47 | struct('name','car1_1','path',[dataSet '\car1\'],'startFrame',1,'endFrame',751,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
48 | struct('name','car1_2','path',[dataSet '\car1\'],'startFrame',751,'endFrame',1627,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
49 | struct('name','car1_3','path',[dataSet '\car1\'],'startFrame',1627,'endFrame',2629,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
50 | struct('name','car2','path',[dataSet '\car2\'],'startFrame',1,'endFrame',1321,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
51 | struct('name','car3','path',[dataSet '\car3\'],'startFrame',1,'endFrame',1717,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
52 | struct('name','car4','path',[dataSet '\car4\'],'startFrame',1,'endFrame',1345,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
53 | struct('name','car5','path',[dataSet '\car5\'],'startFrame',1,'endFrame',745,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
54 | struct('name','car6_1','path',[dataSet '\car6\'],'startFrame',1,'endFrame',487,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
55 | struct('name','car6_2','path',[dataSet '\car6\'],'startFrame',487,'endFrame',1807,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
56 | struct('name','car6_3','path',[dataSet '\car6\'],'startFrame',1807,'endFrame',2953,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
57 | struct('name','car6_4','path',[dataSet '\car6\'],'startFrame',2953,'endFrame',3925,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
58 | struct('name','car6_5','path',[dataSet '\car6\'],'startFrame',3925,'endFrame',4861,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
59 | struct('name','car7','path',[dataSet '\car7\'],'startFrame',1,'endFrame',1033,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
60 | struct('name','car8_1','path',[dataSet '\car8\'],'startFrame',1,'endFrame',1357,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
61 | struct('name','car8_2','path',[dataSet '\car8\'],'startFrame',1357,'endFrame',2575,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
62 | struct('name','car9','path',[dataSet '\car9\'],'startFrame',1,'endFrame',1879,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
63 | struct('name','car10','path',[dataSet '\car10\'],'startFrame',1,'endFrame',1405,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
64 | struct('name','car11','path',[dataSet '\car11\'],'startFrame',1,'endFrame',337,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
65 | struct('name','car12','path',[dataSet '\car12\'],'startFrame',1,'endFrame',499,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
66 | struct('name','car13','path',[dataSet '\car13\'],'startFrame',1,'endFrame',415,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
67 | struct('name','car14','path',[dataSet '\car14\'],'startFrame',1,'endFrame',1327,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
68 | struct('name','car15','path',[dataSet '\car15\'],'startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
69 | struct('name','car16_1','path',[dataSet '\car16\'],'startFrame',1,'endFrame',415,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
70 | struct('name','car16_2','path',[dataSet '\car16\'],'startFrame',415,'endFrame',1993,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
71 | struct('name','car17','path',[dataSet '\car17\'],'startFrame',1,'endFrame',1057,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
72 | struct('name','car18','path',[dataSet '\car18\'],'startFrame',1,'endFrame',1207,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
73 | struct('name','group1_1','path',[dataSet '\group1\'],'startFrame',1,'endFrame',1333,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
74 | struct('name','group1_2','path',[dataSet '\group1\'],'startFrame',1333,'endFrame',2515,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
75 | struct('name','group1_3','path',[dataSet '\group1\'],'startFrame',2515,'endFrame',3925,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
76 | struct('name','group1_4','path',[dataSet '\group1\'],'startFrame',3925,'endFrame',4873,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
77 | struct('name','group2_1','path',[dataSet '\group2\'],'startFrame',1,'endFrame',907,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
78 | struct('name','group2_2','path',[dataSet '\group2\'],'startFrame',907,'endFrame',1771,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
79 | struct('name','group2_3','path',[dataSet '\group2\'],'startFrame',1771,'endFrame',2683,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
80 | struct('name','group3_1','path',[dataSet '\group3\'],'startFrame',1,'endFrame',1567,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
81 | struct('name','group3_2','path',[dataSet '\group3\'],'startFrame',1567,'endFrame',2827,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
82 | struct('name','group3_3','path',[dataSet '\group3\'],'startFrame',2827,'endFrame',4369,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
83 | struct('name','group3_4','path',[dataSet '\group3\'],'startFrame',4369,'endFrame',5527,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
84 | struct('name','person1','path',[dataSet '\person1\'],'startFrame',1,'endFrame',799,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
85 | struct('name','person2_1','path',[dataSet '\person2\'],'startFrame',1,'endFrame',1189,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
86 | struct('name','person2_2','path',[dataSet '\person2\'],'startFrame',1189,'endFrame',2623,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
87 | struct('name','person3','path',[dataSet '\person3\'],'startFrame',1,'endFrame',643,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
88 | struct('name','person4_1','path',[dataSet '\person4\'],'startFrame',1,'endFrame',1501,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
89 | struct('name','person4_2','path',[dataSet '\person4\'],'startFrame',1501,'endFrame',2743,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
90 | struct('name','person5_1','path',[dataSet '\person5\'],'startFrame',1,'endFrame',877,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
91 | struct('name','person5_2','path',[dataSet '\person5\'],'startFrame',877,'endFrame',2101,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
92 | struct('name','person6','path',[dataSet '\person6\'],'startFrame',1,'endFrame',901,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
93 | struct('name','person7_1','path',[dataSet '\person7\'],'startFrame',1,'endFrame',1249,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
94 | struct('name','person7_2','path',[dataSet '\person7\'],'startFrame',1249,'endFrame',2065,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
95 | struct('name','person8_1','path',[dataSet '\person8\'],'startFrame',1,'endFrame',1075,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
96 | struct('name','person8_2','path',[dataSet '\person8\'],'startFrame',1075,'endFrame',1525,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
97 | struct('name','person9','path',[dataSet '\person9\'],'startFrame',1,'endFrame',661,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
98 | struct('name','person10','path',[dataSet '\person10\'],'startFrame',1,'endFrame',1021,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
99 | struct('name','person11','path',[dataSet '\person11\'],'startFrame',1,'endFrame',721,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
100 | struct('name','person12_1','path',[dataSet '\person12\'],'startFrame',1,'endFrame',601,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
101 | struct('name','person12_2','path',[dataSet '\person12\'],'startFrame',601,'endFrame',1621,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
102 | struct('name','person13','path',[dataSet '\person13\'],'startFrame',1,'endFrame',883,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
103 | struct('name','person14_1','path',[dataSet '\person14\'],'startFrame',1,'endFrame',847,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
104 | struct('name','person14_2','path',[dataSet '\person14\'],'startFrame',847,'endFrame',1813,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
105 | struct('name','person14_3','path',[dataSet '\person14\'],'startFrame',1813,'endFrame',2923,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
106 | struct('name','person15','path',[dataSet '\person15\'],'startFrame',1,'endFrame',1339,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
107 | struct('name','person16','path',[dataSet '\person16\'],'startFrame',1,'endFrame',1147,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
108 | struct('name','person17_1','path',[dataSet '\person17\'],'startFrame',1,'endFrame',1501,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
109 | struct('name','person17_2','path',[dataSet '\person17\'],'startFrame',1501,'endFrame',2347,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
110 | struct('name','person18','path',[dataSet '\person18\'],'startFrame',1,'endFrame',1393,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
111 | struct('name','person19_1','path',[dataSet '\person19\'],'startFrame',1,'endFrame',1243,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
112 | struct('name','person19_2','path',[dataSet '\person19\'],'startFrame',1243,'endFrame',2791,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
113 | struct('name','person19_3','path',[dataSet '\person19\'],'startFrame',2791,'endFrame',4357,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
114 | struct('name','person20','path',[dataSet '\person20\'],'startFrame',1,'endFrame',1783,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
115 | struct('name','person21','path',[dataSet '\person21\'],'startFrame',1,'endFrame',487,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
116 | struct('name','person22','path',[dataSet '\person22\'],'startFrame',1,'endFrame',199,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
117 | struct('name','person23','path',[dataSet '\person23\'],'startFrame',1,'endFrame',397,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
118 | struct('name','truck1','path',[dataSet '\truck1\'],'startFrame',1,'endFrame',463,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
119 | struct('name','truck2','path',[dataSet '\truck2\'],'startFrame',1,'endFrame',385,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
120 | struct('name','truck3','path',[dataSet '\truck3\'],'startFrame',1,'endFrame',535,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
121 | struct('name','truck4_1','path',[dataSet '\truck4\'],'startFrame',1,'endFrame',577,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
122 | struct('name','truck4_2','path',[dataSet '\truck4\'],'startFrame',577,'endFrame',1261,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
123 | struct('name','uav1_1','path',[dataSet '\uav1\'],'startFrame',1,'endFrame',1555,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
124 | struct('name','uav1_2','path',[dataSet '\uav1\'],'startFrame',1555,'endFrame',2377,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
125 | struct('name','uav1_3','path',[dataSet '\uav1\'],'startFrame',2473,'endFrame',3469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
126 | struct('name','uav2','path',[dataSet '\uav2\'],'startFrame',1,'endFrame',133,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
127 | struct('name','uav3','path',[dataSet '\uav3\'],'startFrame',1,'endFrame',265,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
128 | struct('name','uav4','path',[dataSet '\uav4\'],'startFrame',1,'endFrame',157,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
129 | struct('name','uav5','path',[dataSet '\uav5\'],'startFrame',1,'endFrame',139,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
130 | struct('name','uav6','path',[dataSet '\uav6\'],'startFrame',1,'endFrame',109,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
131 | struct('name','uav7','path',[dataSet '\uav7\'],'startFrame',1,'endFrame',373,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
132 | struct('name','uav8','path',[dataSet '\uav8\'],'startFrame',1,'endFrame',301,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
133 | struct('name','wakeboard1','path',[dataSet '\wakeboard1\'],'startFrame',1,'endFrame',421,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
134 | struct('name','wakeboard2','path',[dataSet '\wakeboard2\'],'startFrame',1,'endFrame',733,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
135 | struct('name','wakeboard3','path',[dataSet '\wakeboard3\'],'startFrame',1,'endFrame',823,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
136 | struct('name','wakeboard4','path',[dataSet '\wakeboard4\'],'startFrame',1,'endFrame',697,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
137 | struct('name','wakeboard5','path',[dataSet '\wakeboard5\'],'startFrame',1,'endFrame',1675,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
138 | struct('name','wakeboard6','path',[dataSet '\wakeboard6\'],'startFrame',1,'endFrame',1165,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
139 | struct('name','wakeboard7','path',[dataSet '\wakeboard7\'],'startFrame',1,'endFrame',199,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
140 | struct('name','wakeboard8','path',[dataSet '\wakeboard8\'],'startFrame',1,'endFrame',1543,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
141 | struct('name','wakeboard9','path',[dataSet '\wakeboard9\'],'startFrame',1,'endFrame',355,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
142 | struct('name','wakeboard10','path',[dataSet '\wakeboard10\'],'startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
143 | struct('name','car1_s','path',[dataSet '\car1_s\'],'startFrame',1,'endFrame',1475,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
144 | struct('name','car2_s','path',[dataSet '\car2_s\'],'startFrame',1,'endFrame',320,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
145 | struct('name','car3_s','path',[dataSet '\car3_s\'],'startFrame',1,'endFrame',1300,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
146 | struct('name','car4_s','path',[dataSet '\car4_s\'],'startFrame',1,'endFrame',830,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
147 | struct('name','person1_s','path',[dataSet '\person1_s\'],'startFrame',1,'endFrame',1600,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
148 | struct('name','person2_s','path',[dataSet '\person2_s\'],'startFrame',1,'endFrame',250,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
149 | struct('name','person3_s','path',[dataSet '\person3_s\'],'startFrame',1,'endFrame',505,'nz',6,'ext','jpg','init_rect', [0,0,0,0])};
150 | case 'UAV123_10fps'
151 | seqs = {
152 | struct('name','bike1','path',[dataSet '\bike1\'],'startFrame',1,'endFrame',1029,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
153 | struct('name','bike2','path',[dataSet '\bike2\'],'startFrame',1,'endFrame',185,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
154 | struct('name','bike3','path',[dataSet '\bike3\'],'startFrame',1,'endFrame',145,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
155 | struct('name','bird1_1','path',[dataSet '\bird1\'],'startFrame',1,'endFrame',85,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
156 | struct('name','bird1_2','path',[dataSet '\bird1\'],'startFrame',259,'endFrame',493,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
157 | struct('name','bird1_3','path',[dataSet '\bird1\'],'startFrame',525,'endFrame',813,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
158 | struct('name','boat1','path',[dataSet '\boat1\'],'startFrame',1,'endFrame',301,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
159 | struct('name','boat2','path',[dataSet '\boat2\'],'startFrame',1,'endFrame',267,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
160 | struct('name','boat3','path',[dataSet '\boat3\'],'startFrame',1,'endFrame',301,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
161 | struct('name','boat4','path',[dataSet '\boat4\'],'startFrame',1,'endFrame',185,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
162 | struct('name','boat5','path',[dataSet '\boat5\'],'startFrame',1,'endFrame',169,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
163 | struct('name','boat6','path',[dataSet '\boat6\'],'startFrame',1,'endFrame',269,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
164 | struct('name','boat7','path',[dataSet '\boat7\'],'startFrame',1,'endFrame',179,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
165 | struct('name','boat8','path',[dataSet '\boat8\'],'startFrame',1,'endFrame',229,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
166 | struct('name','boat9','path',[dataSet '\boat9\'],'startFrame',1,'endFrame',467,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
167 | struct('name','building1','path',[dataSet '\building1\'],'startFrame',1,'endFrame',157,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
168 | struct('name','building2','path',[dataSet '\building2\'],'startFrame',1,'endFrame',193,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
169 | struct('name','building3','path',[dataSet '\building3\'],'startFrame',1,'endFrame',277,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
170 | struct('name','building4','path',[dataSet '\building4\'],'startFrame',1,'endFrame',263,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
171 | struct('name','building5','path',[dataSet '\building5\'],'startFrame',1,'endFrame',161,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
172 | struct('name','car1_1','path',[dataSet '\car1\'],'startFrame',1,'endFrame',251,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
173 | struct('name','car1_2','path',[dataSet '\car1\'],'startFrame',251,'endFrame',543,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
174 | struct('name','car1_3','path',[dataSet '\car1\'],'startFrame',543,'endFrame',877,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
175 | struct('name','car2','path',[dataSet '\car2\'],'startFrame',1,'endFrame',441,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
176 | struct('name','car3','path',[dataSet '\car3\'],'startFrame',1,'endFrame',573,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
177 | struct('name','car4','path',[dataSet '\car4\'],'startFrame',1,'endFrame',449,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
178 | struct('name','car5','path',[dataSet '\car5\'],'startFrame',1,'endFrame',249,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
179 | struct('name','car6_1','path',[dataSet '\car6\'],'startFrame',1,'endFrame',163,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
180 | struct('name','car6_2','path',[dataSet '\car6\'],'startFrame',163,'endFrame',603,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
181 | struct('name','car6_3','path',[dataSet '\car6\'],'startFrame',603,'endFrame',985,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
182 | struct('name','car6_4','path',[dataSet '\car6\'],'startFrame',985,'endFrame',1309,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
183 | struct('name','car6_5','path',[dataSet '\car6\'],'startFrame',1309,'endFrame',1621,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
184 | struct('name','car7','path',[dataSet '\car7\'],'startFrame',1,'endFrame',345,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
185 | struct('name','car8_1','path',[dataSet '\car8\'],'startFrame',1,'endFrame',453,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
186 | struct('name','car8_2','path',[dataSet '\car8\'],'startFrame',453,'endFrame',859,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
187 | struct('name','car9','path',[dataSet '\car9\'],'startFrame',1,'endFrame',627,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
188 | struct('name','car10','path',[dataSet '\car10\'],'startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
189 | struct('name','car11','path',[dataSet '\car11\'],'startFrame',1,'endFrame',113,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
190 | struct('name','car12','path',[dataSet '\car12\'],'startFrame',1,'endFrame',167,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
191 | struct('name','car13','path',[dataSet '\car13\'],'startFrame',1,'endFrame',139,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
192 | struct('name','car14','path',[dataSet '\car14\'],'startFrame',1,'endFrame',443,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
193 | struct('name','car15','path',[dataSet '\car15\'],'startFrame',1,'endFrame',157,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
194 | struct('name','car16_1','path',[dataSet '\car16\'],'startFrame',1,'endFrame',139,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
195 | struct('name','car16_2','path',[dataSet '\car16\'],'startFrame',139,'endFrame',665,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
196 | struct('name','car17','path',[dataSet '\car17\'],'startFrame',1,'endFrame',353,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
197 | struct('name','car18','path',[dataSet '\car18\'],'startFrame',1,'endFrame',403,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
198 | struct('name','group1_1','path',[dataSet '\group1\'],'startFrame',1,'endFrame',445,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
199 | struct('name','group1_2','path',[dataSet '\group1\'],'startFrame',445,'endFrame',839,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
200 | struct('name','group1_3','path',[dataSet '\group1\'],'startFrame',839,'endFrame',1309,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
201 | struct('name','group1_4','path',[dataSet '\group1\'],'startFrame',1309,'endFrame',1625,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
202 | struct('name','group2_1','path',[dataSet '\group2\'],'startFrame',1,'endFrame',303,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
203 | struct('name','group2_2','path',[dataSet '\group2\'],'startFrame',303,'endFrame',591,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
204 | struct('name','group2_3','path',[dataSet '\group2\'],'startFrame',591,'endFrame',895,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
205 | struct('name','group3_1','path',[dataSet '\group3\'],'startFrame',1,'endFrame',523,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
206 | struct('name','group3_2','path',[dataSet '\group3\'],'startFrame',523,'endFrame',943,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
207 | struct('name','group3_3','path',[dataSet '\group3\'],'startFrame',943,'endFrame',1457,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
208 | struct('name','group3_4','path',[dataSet '\group3\'],'startFrame',1457,'endFrame',1843,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
209 | struct('name','person1','path',[dataSet '\person1\'],'startFrame',1,'endFrame',267,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
210 | struct('name','person2_1','path',[dataSet '\person2\'],'startFrame',1,'endFrame',397,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
211 | struct('name','person2_2','path',[dataSet '\person2\'],'startFrame',397,'endFrame',875,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
212 | struct('name','person3','path',[dataSet '\person3\'],'startFrame',1,'endFrame',215,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
213 | struct('name','person4_1','path',[dataSet '\person4\'],'startFrame',1,'endFrame',501,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
214 | struct('name','person4_2','path',[dataSet '\person4\'],'startFrame',501,'endFrame',915,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
215 | struct('name','person5_1','path',[dataSet '\person5\'],'startFrame',1,'endFrame',293,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
216 | struct('name','person5_2','path',[dataSet '\person5\'],'startFrame',293,'endFrame',701,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
217 | struct('name','person6','path',[dataSet '\person6\'],'startFrame',1,'endFrame',301,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
218 | struct('name','person7_1','path',[dataSet '\person7\'],'startFrame',1,'endFrame',417,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
219 | struct('name','person7_2','path',[dataSet '\person7\'],'startFrame',417,'endFrame',689,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
220 | struct('name','person8_1','path',[dataSet '\person8\'],'startFrame',1,'endFrame',359,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
221 | struct('name','person8_2','path',[dataSet '\person8\'],'startFrame',359,'endFrame',509,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
222 | struct('name','person9','path',[dataSet '\person9\'],'startFrame',1,'endFrame',221,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
223 | struct('name','person10','path',[dataSet '\person10\'],'startFrame',1,'endFrame',341,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
224 | struct('name','person11','path',[dataSet '\person11\'],'startFrame',1,'endFrame',241,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
225 | struct('name','person12_1','path',[dataSet '\person12\'],'startFrame',1,'endFrame',201,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
226 | struct('name','person12_2','path',[dataSet '\person12\'],'startFrame',201,'endFrame',541,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
227 | struct('name','person13','path',[dataSet '\person13\'],'startFrame',1,'endFrame',295,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
228 | struct('name','person14_1','path',[dataSet '\person14\'],'startFrame',1,'endFrame',283,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
229 | struct('name','person14_2','path',[dataSet '\person14\'],'startFrame',283,'endFrame',605,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
230 | struct('name','person14_3','path',[dataSet '\person14\'],'startFrame',605,'endFrame',975,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
231 | struct('name','person15','path',[dataSet '\person15\'],'startFrame',1,'endFrame',447,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
232 | struct('name','person16','path',[dataSet '\person16\'],'startFrame',1,'endFrame',383,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
233 | struct('name','person17_1','path',[dataSet '\person17\'],'startFrame',1,'endFrame',501,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
234 | struct('name','person17_2','path',[dataSet '\person17\'],'startFrame',501,'endFrame',783,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
235 | struct('name','person18','path',[dataSet '\person18\'],'startFrame',1,'endFrame',465,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
236 | struct('name','person19_1','path',[dataSet '\person19\'],'startFrame',1,'endFrame',415,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
237 | struct('name','person19_2','path',[dataSet '\person19\'],'startFrame',415,'endFrame',931,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
238 | struct('name','person19_3','path',[dataSet '\person19\'],'startFrame',931,'endFrame',1453,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
239 | struct('name','person20','path',[dataSet '\person20\'],'startFrame',1,'endFrame',595,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
240 | struct('name','person21','path',[dataSet '\person21\'],'startFrame',1,'endFrame',163,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
241 | struct('name','person22','path',[dataSet '\person22\'],'startFrame',1,'endFrame',67,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
242 | struct('name','person23','path',[dataSet '\person23\'],'startFrame',1,'endFrame',133,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
243 | struct('name','truck1','path',[dataSet '\truck1\'],'startFrame',1,'endFrame',155,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
244 | struct('name','truck2','path',[dataSet '\truck2\'],'startFrame',1,'endFrame',129,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
245 | struct('name','truck3','path',[dataSet '\truck3\'],'startFrame',1,'endFrame',179,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
246 | struct('name','truck4_1','path',[dataSet '\truck4\'],'startFrame',1,'endFrame',193,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
247 | struct('name','truck4_2','path',[dataSet '\truck4\'],'startFrame',193,'endFrame',421,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
248 | struct('name','uav1_1','path',[dataSet '\uav1\'],'startFrame',1,'endFrame',519,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
249 | struct('name','uav1_2','path',[dataSet '\uav1\'],'startFrame',519,'endFrame',793,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
250 | struct('name','uav1_3','path',[dataSet '\uav1\'],'startFrame',825,'endFrame',1157,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
251 | struct('name','uav2','path',[dataSet '\uav2\'],'startFrame',1,'endFrame',45,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
252 | struct('name','uav3','path',[dataSet '\uav3\'],'startFrame',1,'endFrame',89,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
253 | struct('name','uav4','path',[dataSet '\uav4\'],'startFrame',1,'endFrame',53,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
254 | struct('name','uav5','path',[dataSet '\uav5\'],'startFrame',1,'endFrame',47,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
255 | struct('name','uav6','path',[dataSet '\uav6\'],'startFrame',1,'endFrame',37,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
256 | struct('name','uav7','path',[dataSet '\uav7\'],'startFrame',1,'endFrame',125,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
257 | struct('name','uav8','path',[dataSet '\uav8\'],'startFrame',1,'endFrame',101,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
258 | struct('name','wakeboard1','path',[dataSet '\wakeboard1\'],'startFrame',1,'endFrame',141,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
259 | struct('name','wakeboard2','path',[dataSet '\wakeboard2\'],'startFrame',1,'endFrame',245,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
260 | struct('name','wakeboard3','path',[dataSet '\wakeboard3\'],'startFrame',1,'endFrame',275,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
261 | struct('name','wakeboard4','path',[dataSet '\wakeboard4\'],'startFrame',1,'endFrame',233,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
262 | struct('name','wakeboard5','path',[dataSet '\wakeboard5\'],'startFrame',1,'endFrame',559,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
263 | struct('name','wakeboard6','path',[dataSet '\wakeboard6\'],'startFrame',1,'endFrame',389,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
264 | struct('name','wakeboard7','path',[dataSet '\wakeboard7\'],'startFrame',1,'endFrame',67,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
265 | struct('name','wakeboard8','path',[dataSet '\wakeboard8\'],'startFrame',1,'endFrame',515,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
266 | struct('name','wakeboard9','path',[dataSet '\wakeboard9\'],'startFrame',1,'endFrame',119,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
267 | struct('name','wakeboard10','path',[dataSet '\wakeboard10\'],'startFrame',1,'endFrame',157,'nz',6,'ext','jpg','init_rect',[0,0,0,0]),...
268 | struct('name','car1_s','path',[dataSet '\car1_s\'],'startFrame',1,'endFrame',492,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
269 | struct('name','car2_s','path',[dataSet '\car2_s\'],'startFrame',1,'endFrame',107,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
270 | struct('name','car3_s','path',[dataSet '\car3_s\'],'startFrame',1,'endFrame',434,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
271 | struct('name','car4_s','path',[dataSet '\car4_s\'],'startFrame',1,'endFrame',277,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
272 | struct('name','person1_s','path',[dataSet '\person1_s\'],'startFrame',1,'endFrame',534,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
273 | struct('name','person2_s','path',[dataSet '\person2_s\'],'startFrame',1,'endFrame',84,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
274 | struct('name','person3_s','path',[dataSet '\person3_s\'],'startFrame',1,'endFrame',169,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
275 | };
276 | end
277 |
--------------------------------------------------------------------------------